

Effects of Spatial Reference Frames, Map Dimensionality, and Navigation Modes on Spatial Orientation Efficiency

Abstract
:1. Introduction
2. Literature Review
2.1. Research on the Influence of Map Dimensionality on Spatial Orientation Efficiency
2.2. Research on the Influence of Navigation Mode on Spatial Orientation Efficiency
2.3. Research on Spatial Reference Frame in the Field of Map Navigation
2.4. Hypothesis
3. Materials and Methods
3.1. Pre-Experiment: Participant Screening Experiment
3.2. Participants
3.3. Experimental Design
3.4. Materials
3.5. Experimental Equipment and Procedures
3.5.1. Equipment
3.5.2. Procedures
4. Data Analysis
4.1. Behavior Indicators
4.1.1. Accuracy Rate
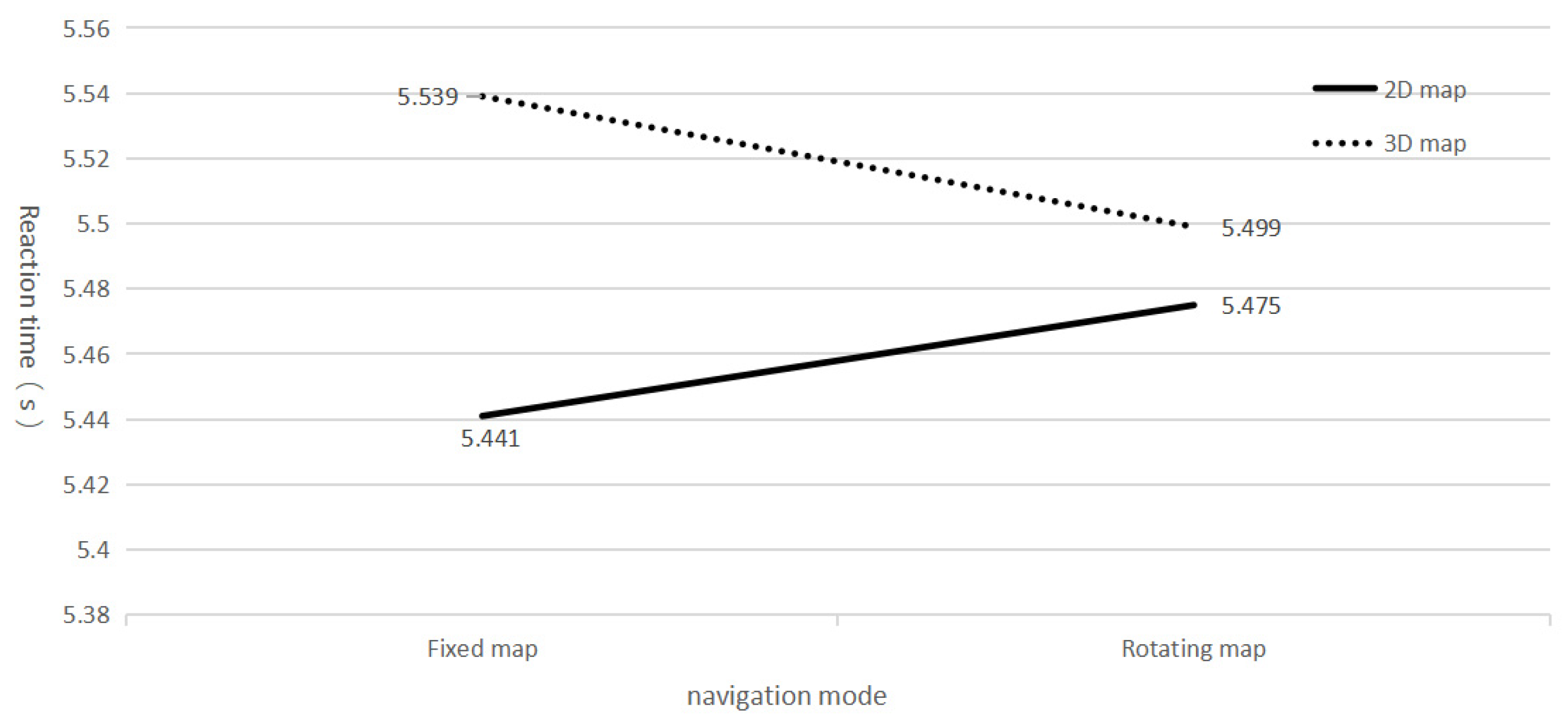
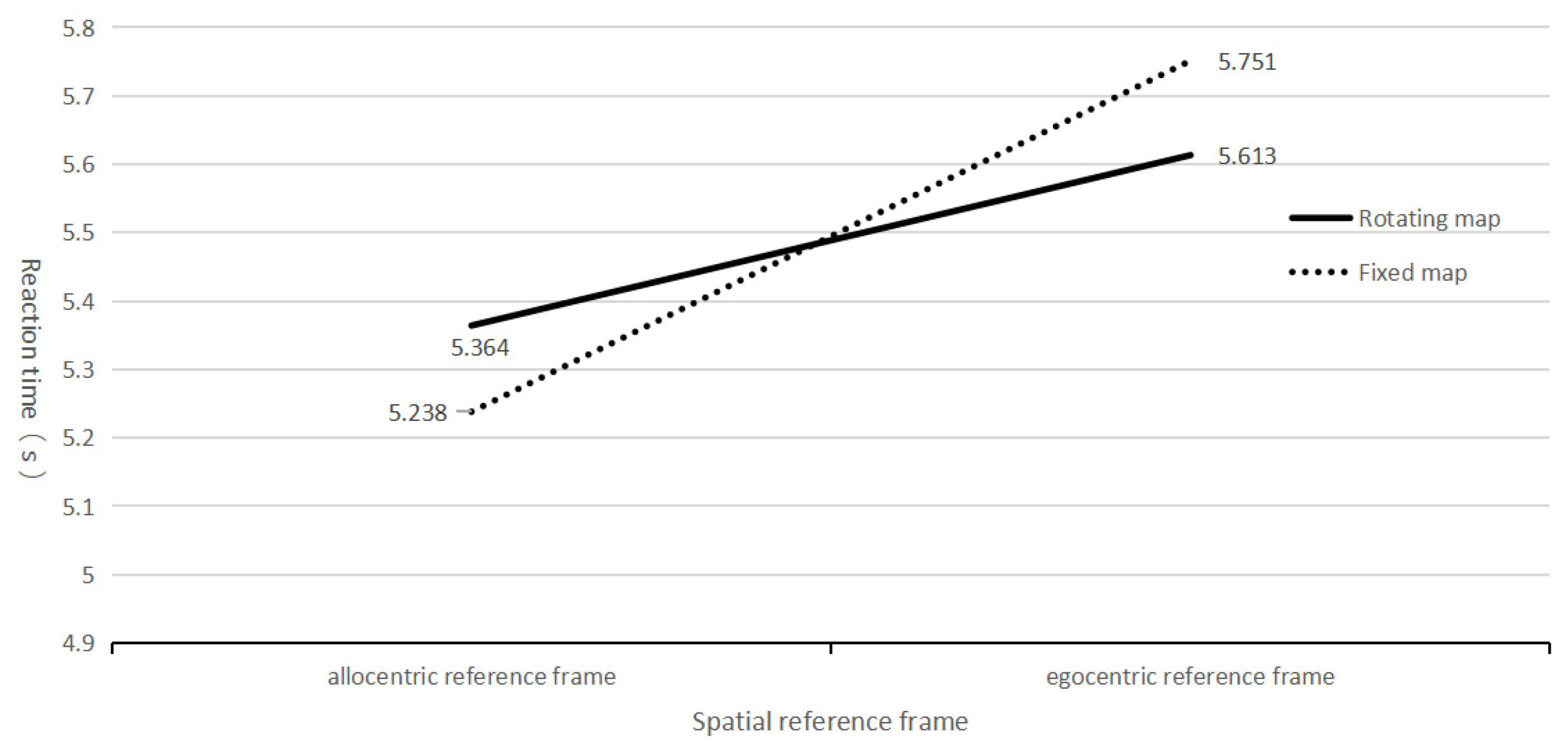
4.1.2. Reaction time
4.2. Cognitive Indicators
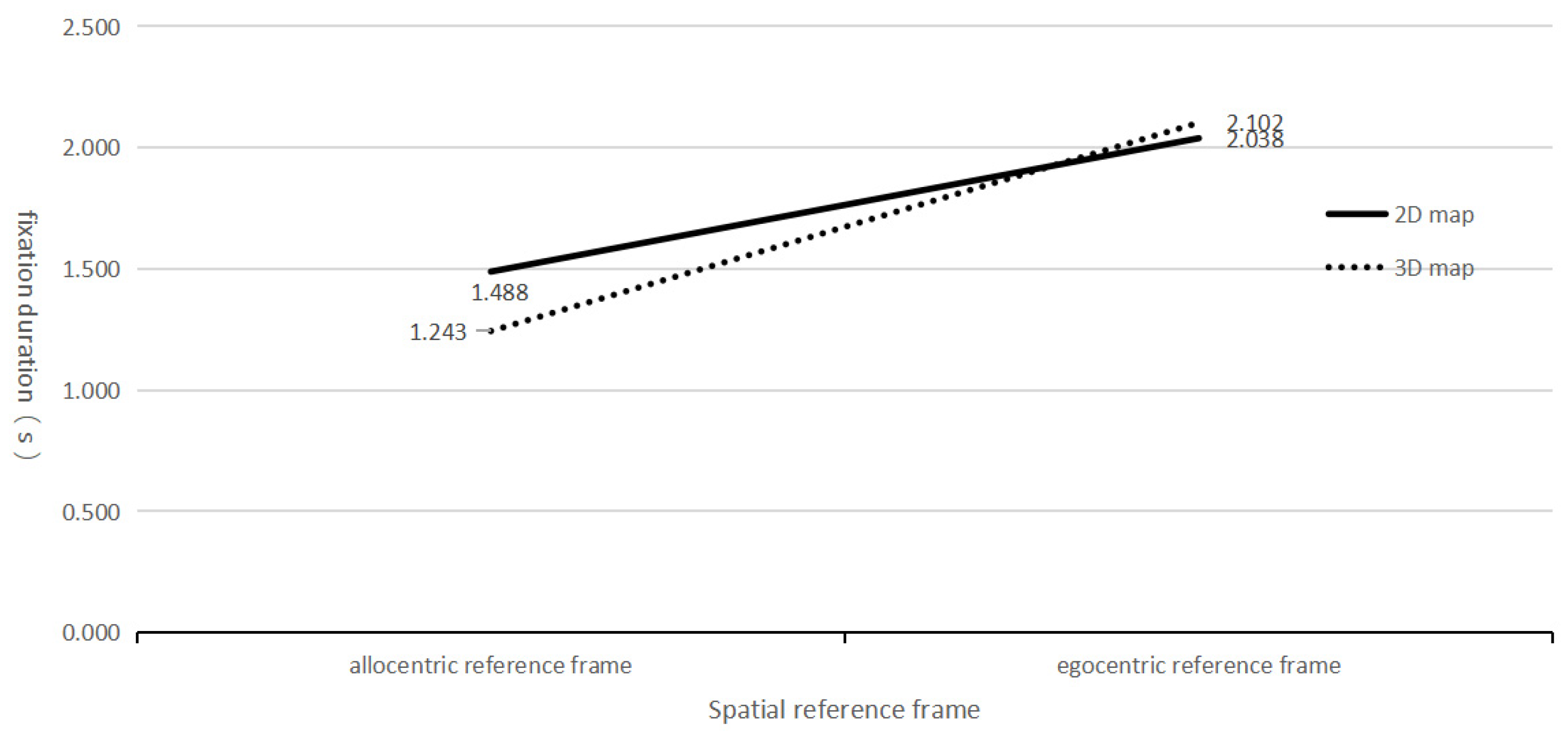
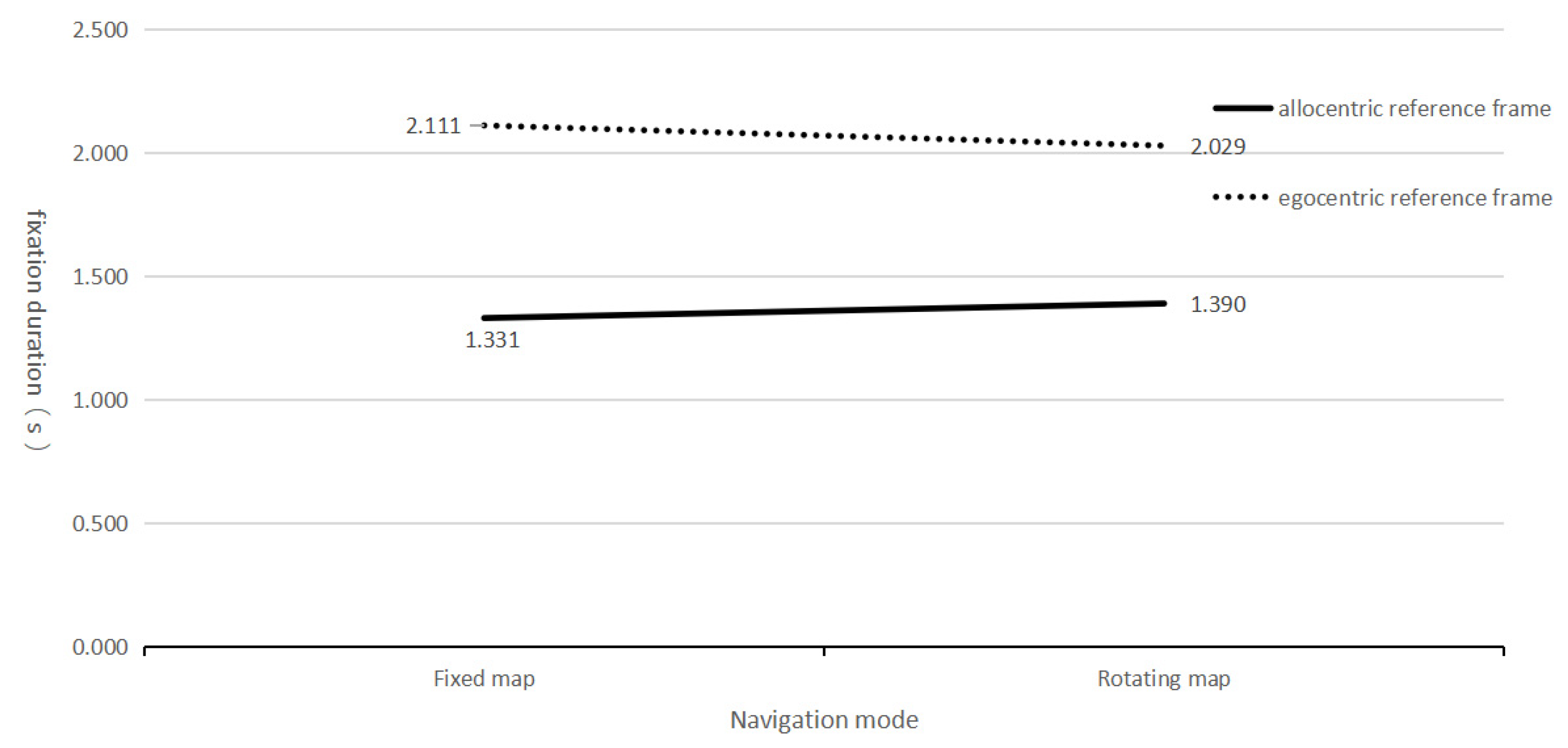
4.2.1. Fixation Duration
4.2.2. Pupil Diameter
4.2.3. Average Saccade Amplitude
5. Discussion
- Accuracy rate: In the map navigation task, using a 2D fixed map in the allocentric reference frame resulted in a high accuracy rate with a low cognitive load and a low reaction time. Similarly, using a 2D rotating map also led to a high accuracy rate, a low cognitive load, and a low reaction time compared to the reference frame.
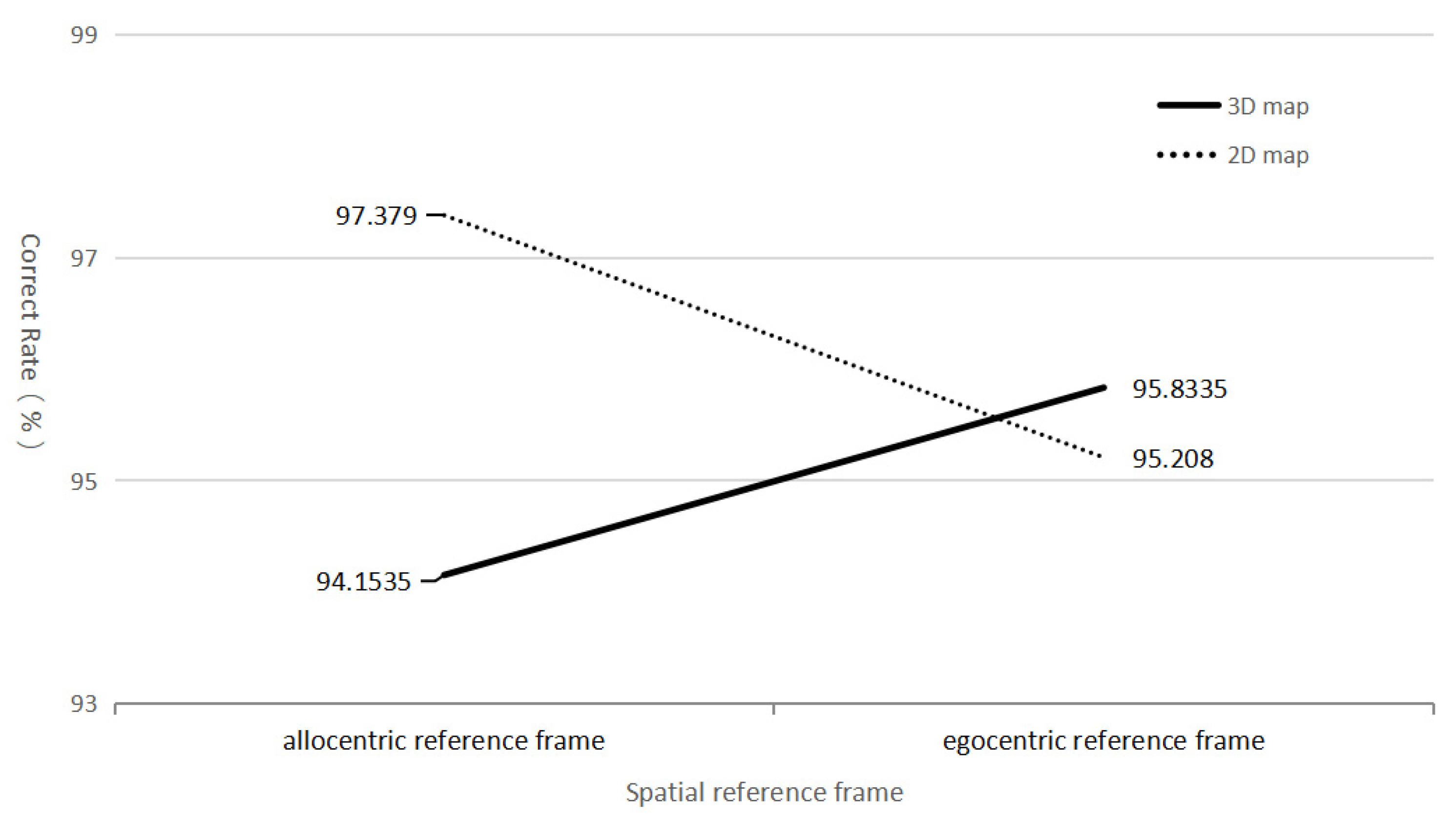
- Cognitive load and positioning efficiency: The simplicity of 2D maps proved to reduce the cognitive load of users and improve their positioning efficiency more effectively than the complexity of 3D maps in the map navigation task.
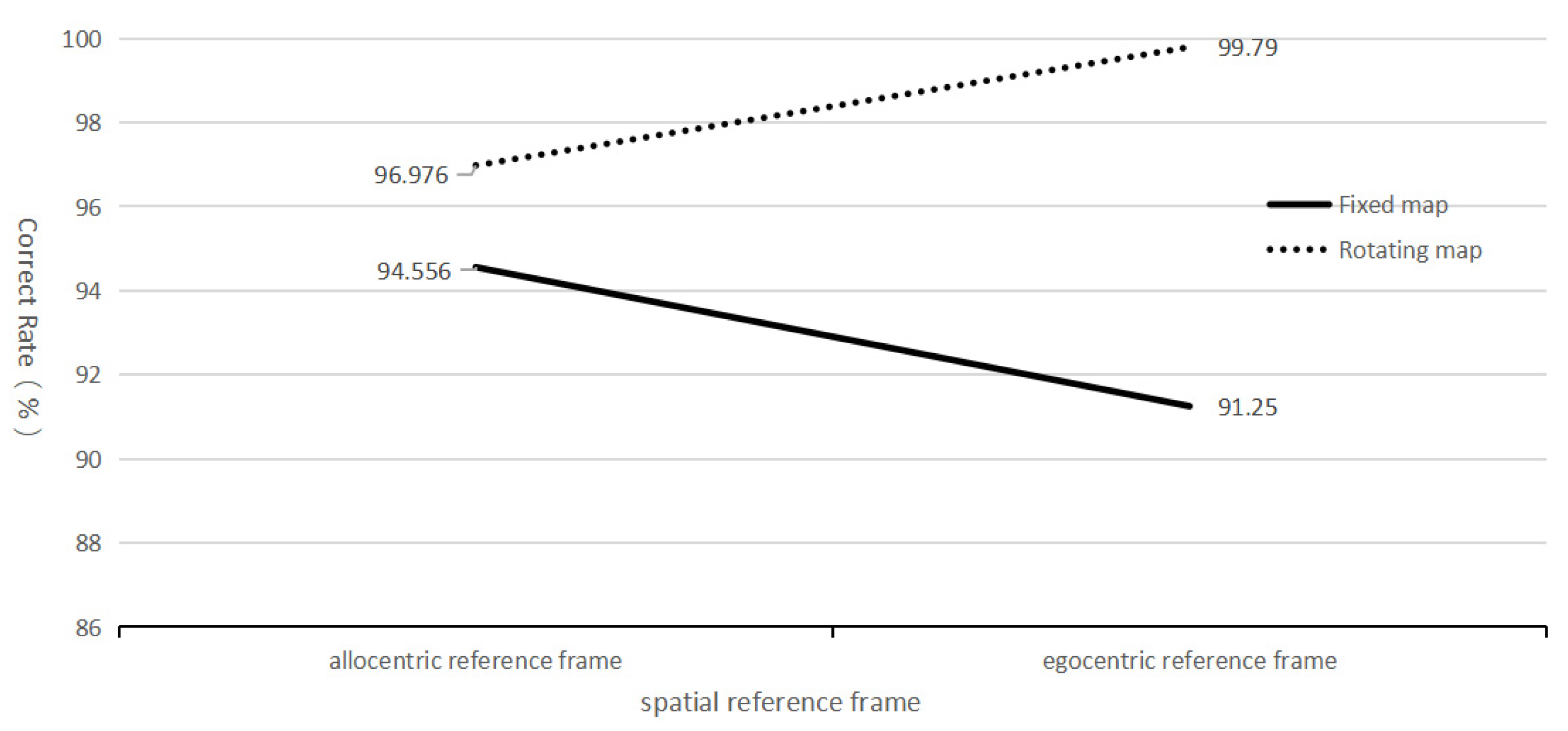
- Cognitive habits and efficiency: The fixed map was found to align better with the cognitive habits of participants in the allocentric reference frame, while the rotating map was more suited to the cognitive habits of participants in the egocentric reference frame. This alignment resulted in improved cognitive efficiency for both groups.
5.1. Behavior Indicators
5.1.1. Accuracy Rate
5.1.2. Reaction Time
5.1.3. Behavior Indicators Overview
5.2. Cognitive Processing
5.2.1. Fixation Duration
5.2.2. Pupil Diameter
5.2.3. Saccade Amplitude
5.2.4. Cognitive Processing Overview
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Maceachren, A.M. How Maps Work: Representation, Visualization, and Design; Guilford Press: New York, NY, USA, 2004; ISBN 157230040X. [Google Scholar]
- Kiefer, P.; Giannopoulos, I.; Raubal, M.; Duchowski, A. Eye tracking for spatial research: Cognition, computation, challenges. Spat. Cogn. Comput. 2017, 17, 1–19. [Google Scholar] [CrossRef]
- Shepherd, I.D. Travails in the Third Dimension: A Critical Evaluation of Three-Dimensional Geographical Visualization. Geogr. Vis. Concepts Tools Appl. 2008, 199–222. [Google Scholar]
- Aretz, A.J. The design of electronic map displays. Hum. Factors 1991, 33, 85–101. [Google Scholar] [CrossRef]
- Liao, H.; Dong, W.; Peng, C.; Liu, H. Exploring differences of visual attention in pedestrian navigation when using 2D maps and 3D geo-browsers. Cartogr. Geogr. Inf. Sci. 2017, 44, 474–490. [Google Scholar] [CrossRef]
- Dong, W.; Liao, H. Eye tracking to explore the impacts of photorealistic 3D representations in pedstrian navigation performance. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 641–645. [Google Scholar] [CrossRef]
- Brychtova, A.; Coltekin, A. An empirical user study for measuring the influence of colour distance and font size in map reading using eye tracking. Cartogr. J. 2016, 53, 202–212. [Google Scholar] [CrossRef]
- Sweller, J. Cognitive load during problem solving: Effects on learning. Cogn. Sci. 1988, 12, 257–285. [Google Scholar] [CrossRef]
- Shelton, A.L.; Mcnamara, T.P. Systems of spatial reference in human memory. Cogn. Psychol. 2001, 43, 274–310. [Google Scholar] [CrossRef]
- Montello, D.R. Behavioral Geography; Oxford University Press: Oxford, UK, 2013. [Google Scholar]
- Sadalla, E.K.; Montello, D.R. Remembering changes in direction. Environ. Behav. 1989, 21, 346–363. [Google Scholar] [CrossRef]
- Deshmukh, S.S.; Knierim, J.J. Influence of local objects on hippocampal representations: Landmark vectors and memory. Hippocampus 2013, 23, 253–267. [Google Scholar] [CrossRef]
- Oulasvirta, A.; Estlander, S.; Nurminen, A. Embodied interaction with a 3D versus 2D mobile map. Pers. Ubiquitous Comput. 2009, 13, 303–320. [Google Scholar] [CrossRef]
- Partala, T.; Salminen, M. User experience of photorealistic urban pedestrian navigation. In Proceedings of the International Working Conference on Advanced Visual Interfaces, Naples, Italy, 21–25 May 2012; pp. 204–207. [Google Scholar]
- Lei, T.; Wu, S.; Chao, C.; Lee, S. Evaluating differences in spatial visual attention in wayfinding strategy when using 2D and 3D electronic maps. Geojournal 2016, 81, 153–167. [Google Scholar] [CrossRef]
- Aretz, A.J.; Wickens, C.D. The mental rotation of map displays. Hum. Perform. 1992, 5, 303–328. [Google Scholar] [CrossRef]
- Wickens, C.D.; Prevett, T.T. Exploring the dimensions of egocentricity in aircraft navigation displays. J. Exp. Psychol. Appl. 1995, 1, 110. [Google Scholar] [CrossRef]
- Shu Mou, D.L.H.S. Effectiveness of Spatial Orientation of the Rotated Map and the Static Map. Chin. J. Appl. Psychol. 2005, 11, 67–72. [Google Scholar]
- Rodes, W.; Gugerty, L. Effects of electronic map displays and individual differences in ability on navigation performance. Hum. Factors 2012, 54, 589–599. [Google Scholar] [CrossRef] [PubMed]
- Henriksen, S.P.; Midtbø, T. Investigation of map orientation by the use of low-cost virtual reality equipment. In Cartography-Maps Connecting the World, Proceedings of the 27th International Cartographic Conference 2015—ICC2015, Rio de Janeiro, Brazil, 23–28 August 2015; Springer International Publishing: Cham, Switzerland, 2015; pp. 75–88. [Google Scholar]
- Levine, M. You-are-here maps: Psychological considerations. Environ. Behav. 1982, 14, 221–237. [Google Scholar] [CrossRef]
- Tamura, K.; Shinohara, K.; Indurkhya, B. Cognitive experiments using the web and virtual reality to study spatial navigation errors. In Proceedings of the International Conference on Computers in Education, Auckland, New Zealand, 3–6 December 2002; pp. 234–238. [Google Scholar]
- Montello, D.R. Cognitive map-design research in the twentieth century: Theoretical and empirical approaches. Cartogr. Geogr. Inf. Sci. 2002, 29, 283–304. [Google Scholar] [CrossRef]
- Klippel, A.; Winter, S. Structural salience of landmarks for route directions. In International Conference on Spatial Information Theory, Proceedings of the COSIT 2005, Ellicottville, NY, USA, 14–18 September 2005; Springer: Berlin/Heidelberg, Germany, 2005; pp. 347–362. [Google Scholar]
- Wang, R.F.; Spelke, E.S. Human spatial representation: Insights from animals. Trends Cogn. Sci. 2002, 6, 376–382. [Google Scholar] [CrossRef]
- Golledge, R.G.; Dougherty, V.; Bell, S. Acquiring spatial knowledge: Survey versus route-based knowledge in unfamiliar environments. Ann. Assoc. Am. Geogr. 1995, 85, 134–158. [Google Scholar]
- Hegarty, M. Mechanical reasoning by mental simulation. Trends Cogn. Sci. 2004, 8, 280–285. [Google Scholar] [CrossRef] [PubMed]
- Hegarty, M.; Waller, D. A dissociation between mental rotation and perspective-taking spatial abilities. Intelligence 2004, 32, 175–191. [Google Scholar] [CrossRef]
- Li, Y. Frame of Reference and Mental Rotation Spatia Cognition Research; Guangxi Teachers Education University: Nanning, China, 2013. [Google Scholar]
- Liang, L. The Effect of Cognitive Style and the Habit of Spatial Orientation on Spatial Cognitive Ability; Wuhan Sports University: Wuhan, China, 2014. [Google Scholar]
- Levinson, S.C.; Kita, S.; Haun, D.B.; Rasch, B.H. Returning the tables: Language affects spatial reasoning. Cognition 2002, 84, 155–188. [Google Scholar] [CrossRef]
- Levinson, S.C. Frames of reference and Molyneux’s question: Crosslinguistic evidence. Lang. Space 1996, 109, 169. [Google Scholar]
- Rayner, K. Eye movements in reading and information processing: 20 years of research. Psychol. Bull. 1998, 124, 372. [Google Scholar] [CrossRef] [PubMed]
- Liao, H.; Wang, X.; Dong, W.; Meng, L. Measuring the influence of map label density on perceived complexity: A user study using eye tracking. Cartogr. Geogr. Inf. Sci. 2019, 46, 210–227. [Google Scholar] [CrossRef]
- Duchowski, T.A. Eye Tracking: Methodology Theory and Practice; Springer: Berlin/Heidelberg, Germany, 2017; ISBN 3319578839. [Google Scholar]
- Yang, N. Study on Several Issues of 3D Map Design Based on Spatial Cognition; Wuhan University: Wuhan, China, 2010. [Google Scholar]
- Yang, Y. The Effect of Spatial Reference Frames on SNARC Effect; Guizhou Normal University: Guiyang, China, 2018. [Google Scholar]
- Yan, Z.; Xilian, G.; Rui, W. The Review of Eye Movement Index in the Multimedia Learning. Mod. Educ. Technol. 2018, 5, 34–40. [Google Scholar]
- Brunyé, T.T.; Gardony, A.; Mahoney, C.R.; Taylor, H.A. Going to town: Visualized perspectives and navigation through virtual environments. Comput. Hum. Behav. 2012, 28, 257–266. [Google Scholar] [CrossRef]
- Lobben, A.K. Tasks, strategies, and cognitive processes associated with navigational map reading: A review perspective. Prof. Geogr. 2004, 56, 270–281. [Google Scholar] [CrossRef]
- Hegarty, M.; Richardson, A.E.; Montello, D.R.; Lovelace, K.; Subbiah, I. Development of a self-report measure of environmental spatial ability. Intelligence 2002, 30, 425–447. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Map Dimensionality | Navigation Mode | Spatial Reference Frame | Average Value | Standard Deviation |
|---|---|---|---|---|
| 2D map | Fixed map | Allocentric reference frame | 96.774 | 7.194 |
| Egocentric reference frame | 90.833 | 14.656 | ||
| overall mean | 93.852 | 11.775 | ||
| 2D map | Rotating map | Allocentric reference frame | 97.984 | 5.680 |
| Egocentric reference frame | 99.583 | 2.282 | ||
| overall mean | 98.770 | 4.393 | ||
| 3D map | Fixed map | Allocentric reference frame | 92.339 | 13.570 |
| Egocentric reference frame | 91.667 | 14.056 | ||
| overall mean | 92.008 | 13.699 | ||
| 3D map | Rotating map | Allocentric reference frame | 95.968 | 7.491 |
| Egocentric reference frame | 100.000 | 0.000 | ||
| overall mean | 97.951 | 5.674 |
| Map Dimensionality | Navigation Mode | Spatial Reference Frame | Average Value | Standard Deviation |
|---|---|---|---|---|
| 2D map | Fixed map | Allocentric reference frame | 5.203 | 0.437 |
| Egocentric reference frame | 5.688 | 0.341 | ||
| overall mean | 5.441 | 0.460 | ||
| 2D map | Rotating map | Allocentric reference frame | 5.360 | 0.291 |
| Egocentric reference frame | 5.594 | 0.317 | ||
| overall mean | 5.475 | 0.324 | ||
| 3D map | Fixed map | Allocentric reference frame | 5.273 | 0.386 |
| Egocentric reference frame | 5.814 | 0.333 | ||
| overall mean | 5.539 | 0.450 | ||
| 3D map | Rotating map | Allocentric reference frame | 5.369 | 0.307 |
| Egocentric reference frame | 5.633 | 0.341 | ||
| overall mean | 5.499 | 0.348 |
| Map Dimensionality | Navigation Mode | Spatial Reference Frame | Average Value | Standard Deviation |
|---|---|---|---|---|
| 2D map | Fixed map | Allocentric reference frame | 1.446 | 0.901 |
| Egocentric reference frame | 2.023 | 1.130 | ||
| overall mean | 1.730 | 1.052 | ||
| 2D map | Rotating map | Allocentric reference frame | 1.510 | 0.883 |
| Egocentric reference frame | 2.054 | 1.086 | ||
| overall mean | 1.778 | 1.017 | ||
| 3D map | Fixed map | Allocentric reference frame | 1.217 | 0.982 |
| Egocentric reference frame | 2.200 | 1.153 | ||
| overall mean | 1.700 | 1.171 | ||
| 3D map | Rotating map | Allocentric reference frame | 1.270 | 0.957 |
| Egocentric reference frame | 2.005 | 1.030 | ||
| overall mean | 1.631 | 1.053 |
| Map Dimensionality | Navigation Mode | Spatial Reference Frame | Average Value | Standard Deviation |
|---|---|---|---|---|
| 2D map | Fixed map | Allocentric reference frame | 3.088 | 0.306 |
| Egocentric reference frame | 3.363 | 0.404 | ||
| overall mean | 3.223 | 0.381 | ||
| 2D map | Rotating map | Allocentric reference frame | 3.081 | 0.274 |
| Egocentric reference frame | 3.396 | 0.378 | ||
| overall mean | 3.236 | 0.363 | ||
| 3D map | Fixed map | Allocentric reference frame | 3.443 | 0.349 |
| Egocentric reference frame | 3.718 | 0.394 | ||
| overall mean | 3.578 | 0.394 | ||
| 3D map | Rotating map | Allocentric reference frame | 3.443 | 0.366 |
| Egocentric reference frame | 3.6593 | 0.38971 | ||
| overall mean | 3.5494 | 0.39033 |
| Map Dimensionality | Navigation Mode | Spatial Reference Frame | Average Value | Standard Deviation |
|---|---|---|---|---|
| 2D map | Fixed map | Allocentric reference frame | 3.976 | 1.158 |
| Egocentric reference frame | 4.067 | 1.170 | ||
| overall mean | 4.021 | 1.155 | ||
| 2D map | Rotating map | Allocentric reference frame | 3.876 | 1.101 |
| Egocentric reference frame | 3.993 | 1.513 | ||
| overall mean | 3.934 | 1.310 | ||
| 3D map | Fixed map | Allocentric reference frame | 3.062 | 0.955 |
| Egocentric reference frame | 3.196 | 0.903 | ||
| overall mean | 3.128 | 0.925 | ||
| 3D map | Rotating map | Allocentric reference frame | 3.384 | 1.418 |
| Egocentric reference frame | 3.383 | 1.008 | ||
| overall mean | 3.384 | 1.223 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, H.; Yang, N.; Wang, Z.; Fang, H. Effects of Spatial Reference Frames, Map Dimensionality, and Navigation Modes on Spatial Orientation Efficiency. ISPRS Int. J. Geo-Inf. 2023, 12, 476. https://doi.org/10.3390/ijgi12120476
Guo H, Yang N, Wang Z, Fang H. Effects of Spatial Reference Frames, Map Dimensionality, and Navigation Modes on Spatial Orientation Efficiency. ISPRS International Journal of Geo-Information. 2023; 12(12):476. https://doi.org/10.3390/ijgi12120476
Chicago/Turabian StyleGuo, Hongyun, Nai Yang, Zhong Wang, and Hao Fang. 2023. "Effects of Spatial Reference Frames, Map Dimensionality, and Navigation Modes on Spatial Orientation Efficiency" ISPRS International Journal of Geo-Information 12, no. 12: 476. https://doi.org/10.3390/ijgi12120476
APA StyleGuo, H., Yang, N., Wang, Z., & Fang, H. (2023). Effects of Spatial Reference Frames, Map Dimensionality, and Navigation Modes on Spatial Orientation Efficiency. ISPRS International Journal of Geo-Information, 12(12), 476. https://doi.org/10.3390/ijgi12120476