3.2. Geometrically Induced Topology
According to [
2], a spatial model consisting of points, open segments and open polygons is
topologically consistent if all objects are pairwise disjoint. Otherwise, it is topologically inconsistent. Consequently, if a model is topologically inconsistent, then the existing overlaps between objects are not captured in the topological model and therefore appear to be non-existent. This notion of topological consistency differs from previous definitions in the literature in that it relates geometry and topology in a meaningful way. In fact, through this, a comparison between the explicit topology of the model and the topology induced by geometry now becomes possible.
The models considered in this article are mostly
simplicial complexes, i.e., their constituting objects are simplices. The textbook by Hatcher [
23] contains more information about these structures. The topology of a finite simplicial complex can be captured explicitly by modelling the boundary relationships between a simplex and its bounding simplices. This gives the so-called
face poset, a partially ordered set whose elements are the
k-dimensional simplices for any
called
faces, and the partial order relation is the inclusion of faces. According to [
6], a finite partially ordered set is a certain topological space known as a so-called
-space, and vice versa every finite
-set a partially ordered set.
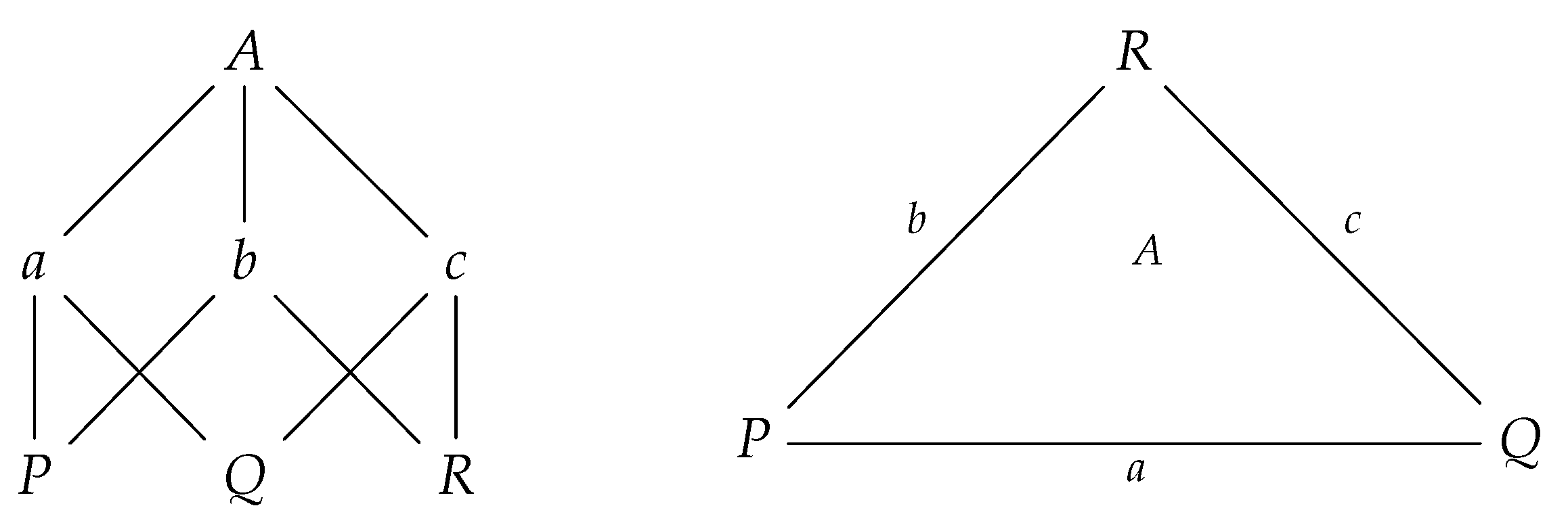
A minimal representation of the topology of a partially ordered set is given by the
Hasse diagram, which depicts all direct relationships between elements in the partial ordering. The Hasse diagram is a minimal binary relation such that the reflexive and transitive closure of this binary relation gives back the partial ordering. An example Hasse diagram is given in
Figure 1, which depicts the Hasse diagram of the face poset of a triangle.
This idea led to the notion of
topological database, which encodes topological data into a relational database where the reflexive and transitive closure operation becomes a fundamental operator in relational algebra. More details can be found in [
5].
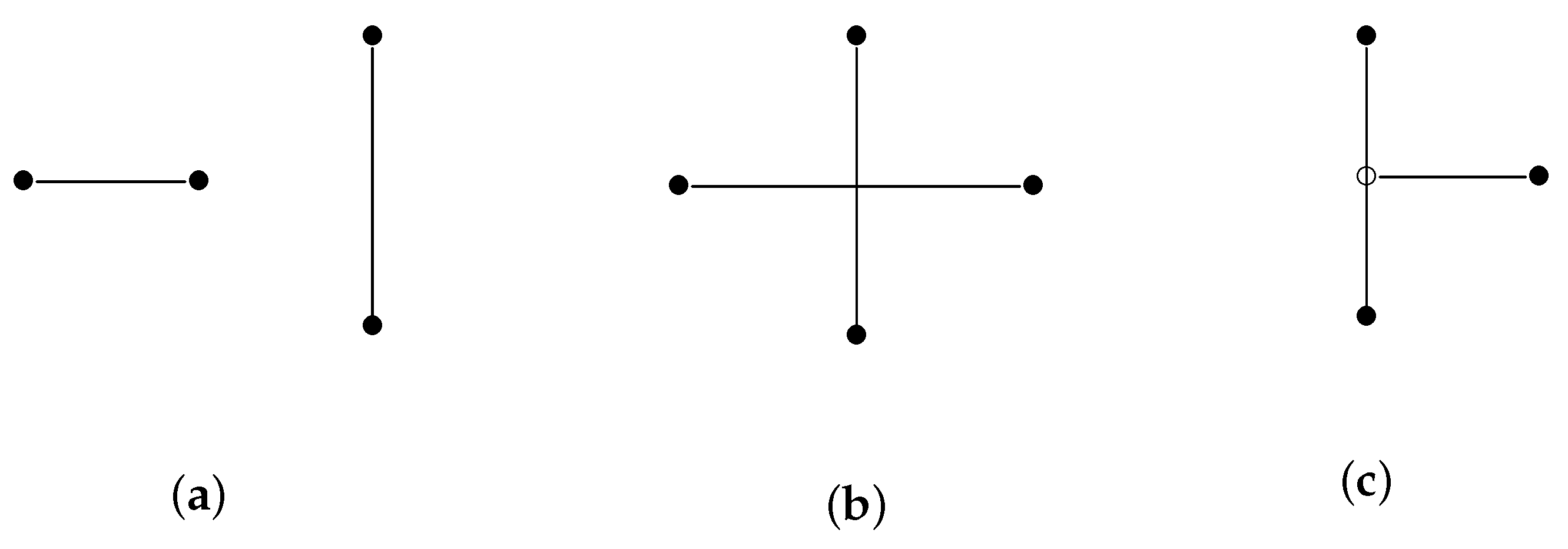
By assigning coordinates to the 0-dimensional simplices of a simplicial complex, it becomes a geometric model in Euclidean space. Special care must be taken if the model is to be topologically consistent (in the sense above), even if all points are given distinct coordinate tuples. For example, if a 1-dimensional simplicial complex (i.e., a simple graph) is given a geometry in this way, it can happen that, e.g., edges overlap. A complete list of the possible configurations of two line segments without common points is given in
Figure 2. Notice that the solid points • in
Figure 2 indicate that the point is explicitly modelled in the topology, whereas the hollow point ∘ indicates that it is modelled as a part of the horizontal line segment, but its intersection with the vertical line segment is not explicitly modelled in the topology. In the model topology, the two line segments are disjoint in all three cases.
If we assume that all simplicial complexes are of dimension two and that every point and edge is contained in the boundary of a triangle, then there are more possible topologically inconsistent configurations. For two triangles without common vertices or edges, there could possibly occur any one of the following intersections:
The latter implies further topologically inconsistent intersections, such as
line–line or
point–line. Real-world examples where these occur are given and illustrated in [
2].
A B-Rep is a common approach to explicitly store the topology of a model via the boundary relationships. However, it is prone to topological inconsistency, as has been demonstrated in [
2]. Hence, if not carefully applied, the B-Rep representation can induce a loss of topological information. Because of the spread of this carelessness, some data types, such as
CityGML, approach this issue by using labels expressing a
part-of relationship or a similar kind of semantics. Another issue is that a B-Rep does not model the interior of the object it represents—only its boundary. However, the interior cannot always be clearly inferred from the boundary, cf.
Figure 3, left and right configuration. So, here, we may and will presume that a B-Rep does not always properly recover the topology.
In order to remedy this problem and to obtain topological consistency, we define the
overlay of two topological objects
X and
Y. It is given by defining a topology on the set of intersections of the interiors and boundary objects of
X and those of
Y. Namely, for two such objects
, we define:
if either already
x is in the boundary of
y in
X or
Y (either old boundary or in the Euclidean topology) or if
x is a subset of
y geometrically. The latter case does not occur in the old topologies of
X and
Y, respectively, but in the new overlay topology. This new situation is for us a
part-of relationship which extends the topology of the union
. In the implementation, we distinguish between the old boundary relationships and the new Euclidean boundary and new
part-of relationships in the overlay:
The intersection complex is then the structure of a cell complex on the geometric intersection given by the overlay complex.
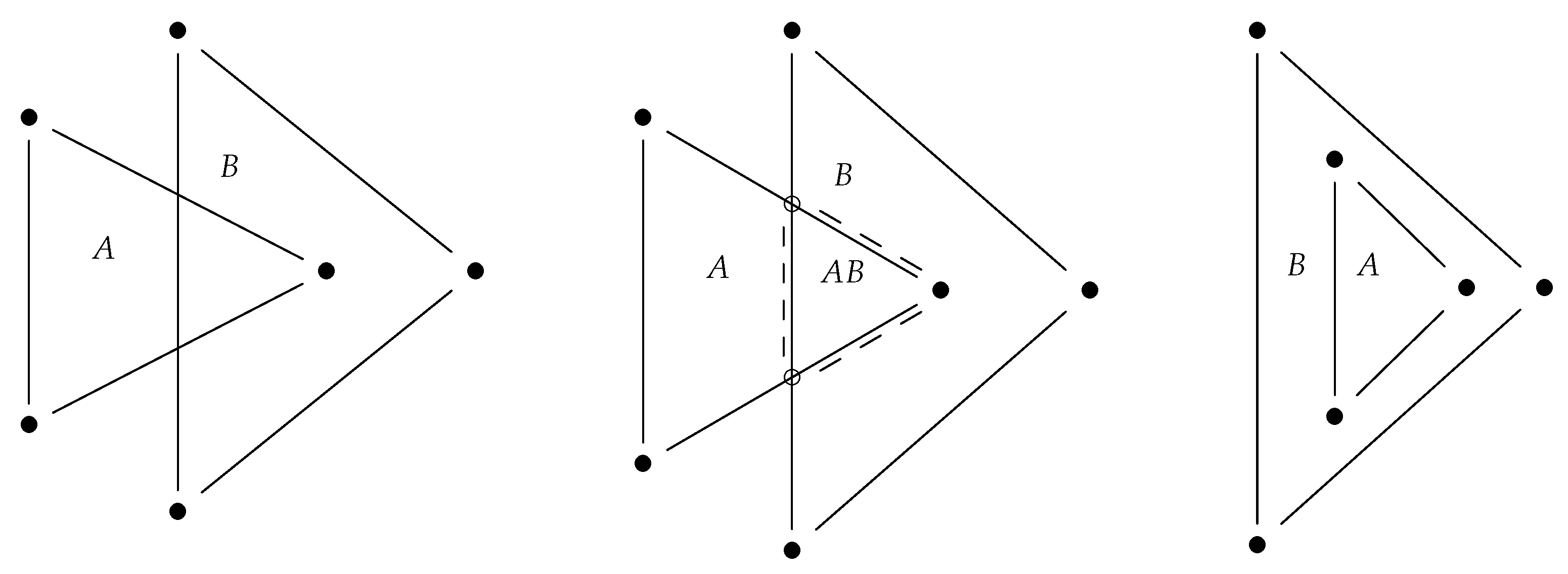
Figure 3 illustrates the concept of overlay. On the left, there are two triangles consisting of points, lines and an interior
A and
B, respectively, and some objects of
A have a non-empty intersection with objects of
B. On the right, the overlay is given by the old objects plus six new objects: the two circle-points, the three broken lines and the interior area
. The topology is given by the old boundary relationship in the union of the two triangles, plus the new Euclidean boundary and the new
part-of relationships. The latter is given by: new circle-points are part of old lines, new broken lines are part of old broken lines and new area
is part of
A and of
B. The Euclidean topology shows us, e.g., that the circle-points, the broken lines and the bullet in the interior of
B are all in the boundary of
. The intersection complex in this example consists of the triangle
together with all its boundary elements. Observe that the overlay topology does not only consist of
border-of relations but also contains
part-of relations.
3.3. Euler Characteristic
Topological invariants play an important role in the characterization of topologies, in that if they are different, then the topological spaces are not homeomorphic, i.e., distinguishable from a topological point of view. An important set of topological invariants is given by the Betti numbers
, which can briefly be explained as the numbers of independent holes of a given dimension
i (the
i-th Betti number), and was discussed in [
9].
The Euler characteristic can be defined by the Betti numbers as follows:
Definition 1 (Euler characteristic topological).
Let X be an n-dimensional cell complex built of only finitely many cells. Let be the i-th Betti number of X with . The topological Euler characteristic can be defined as: The Euler characteristic can also be defined by the number of m-dimensional cells of X with as follows:
Definition 2 (Combinatorial Euler characteristic).
Let X be an n-dimensional cell complex built of only finitely many cells. Let be the number of m-dimensional cells of X with . The combinatorial Euler characteristic can be defined as: Both definitions are equal if the cell complex X with only finitely many cells is topologically consistent (which is true by the definition of cell complex) and the cells of the cell complex X do not have holes. Practically, problems may occur due to computational geometry based on standard computational arithmetic (e.g., double precision) when calculating the geometrically induced topological overlay space . Some intersections may not be recognized, and others may not exist. Therefore, the results happen to be topologically inconsistent and the correctness of both Euler characteristics of those geometrically calculated unions are not always true. Furthermore, these two quantities may differ.
An
n-dimensional sphere is the boundary of a
-dimensional ball. A cellulisation is a decomposition of a manifold to finitely many cells. A cellulisation of a ball can be deformed by flattening each cell to a polyhedron. Euler’s polyhedron formula states that any 3-dimensional polyhedron has Euler characteristic two. The generalized formula for
n-dimensional spheres is given by the definition in [
23] [Examples 0.2 and 0.3] via a representation of the sphere as a cell complex with precisely two cells:
Theorem 1 (General Euler’s polyhedron formula).
Let X be a n-dimensional cell complex, which is a cellulisation of an n-dimensional sphere. Then, it holds true that: Therefore, a segment complex in the shape of the border of a polygon (1-dimensional sphere) has Euler characteristic zero. A triangle complex which is the triangulation of a polyhedron (2-dimensional sphere) has Euler characteristic two (original Euler’s polyhedron formula with ). A tetrahedron complex in the shape of a 3-dimensional sphere has Euler characteristic zero, etc.
In general, it is not a simple task to compute the Euler characteristic of a finite poset. The thesis [
24] found a divide-and-conquer algorithm, but the time complexity of computing the Euler characteristic is still unknown, and possibly exponential in the number of points. For this reason, we approximate the topological Euler characteristic of the overlay space
with the combinatorial Euler characteristic:
which can be expected to bring a great speed-up.
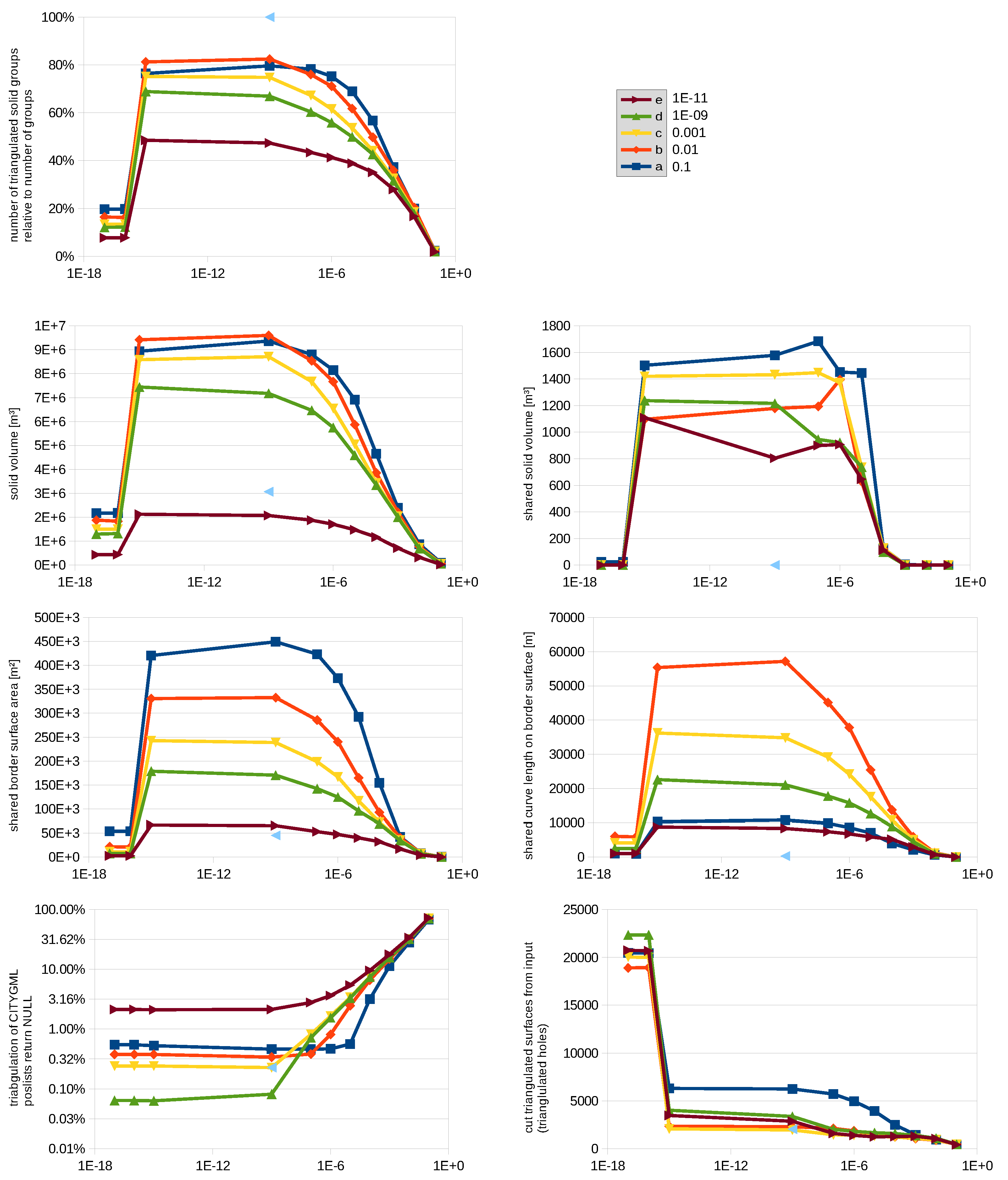
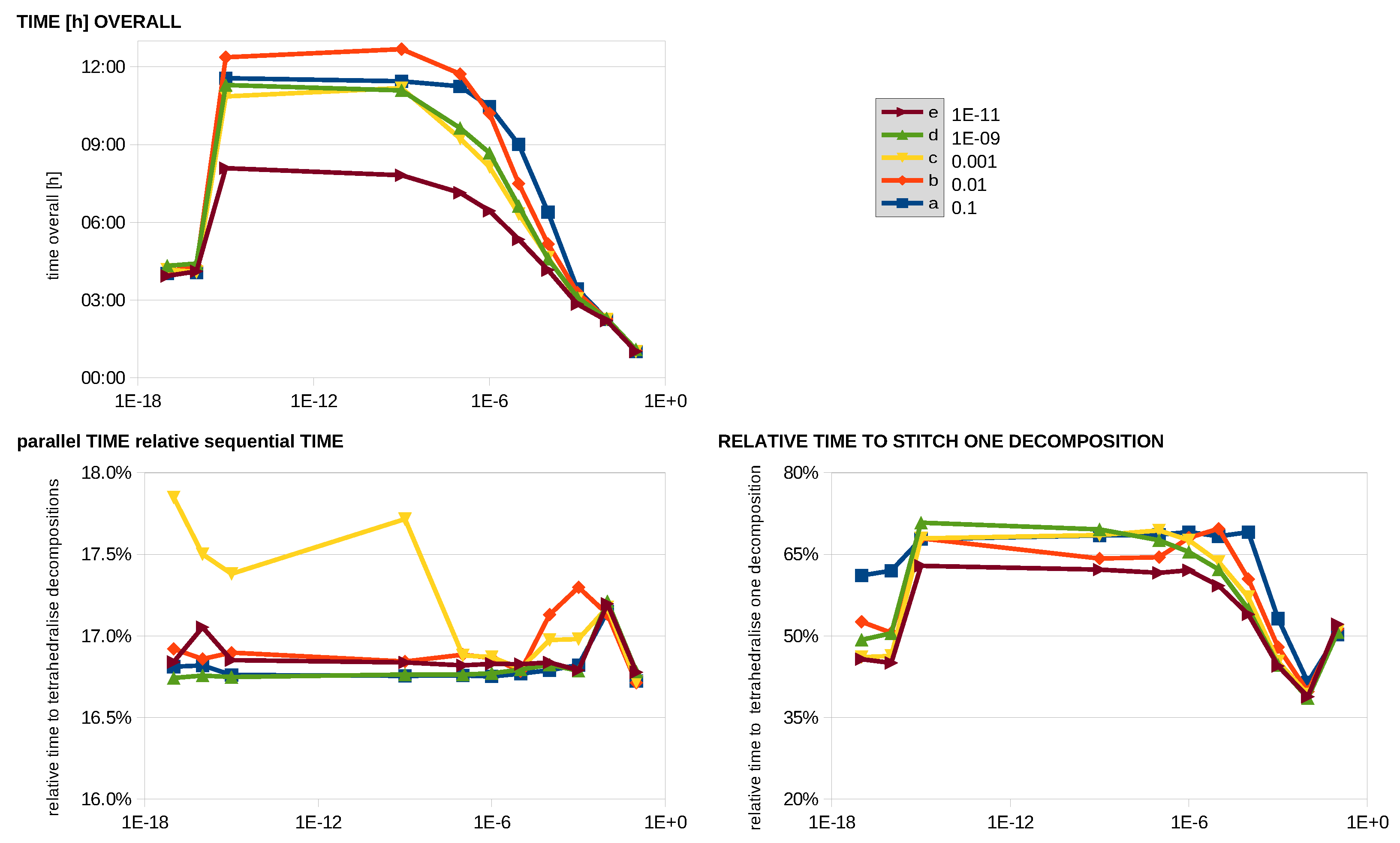
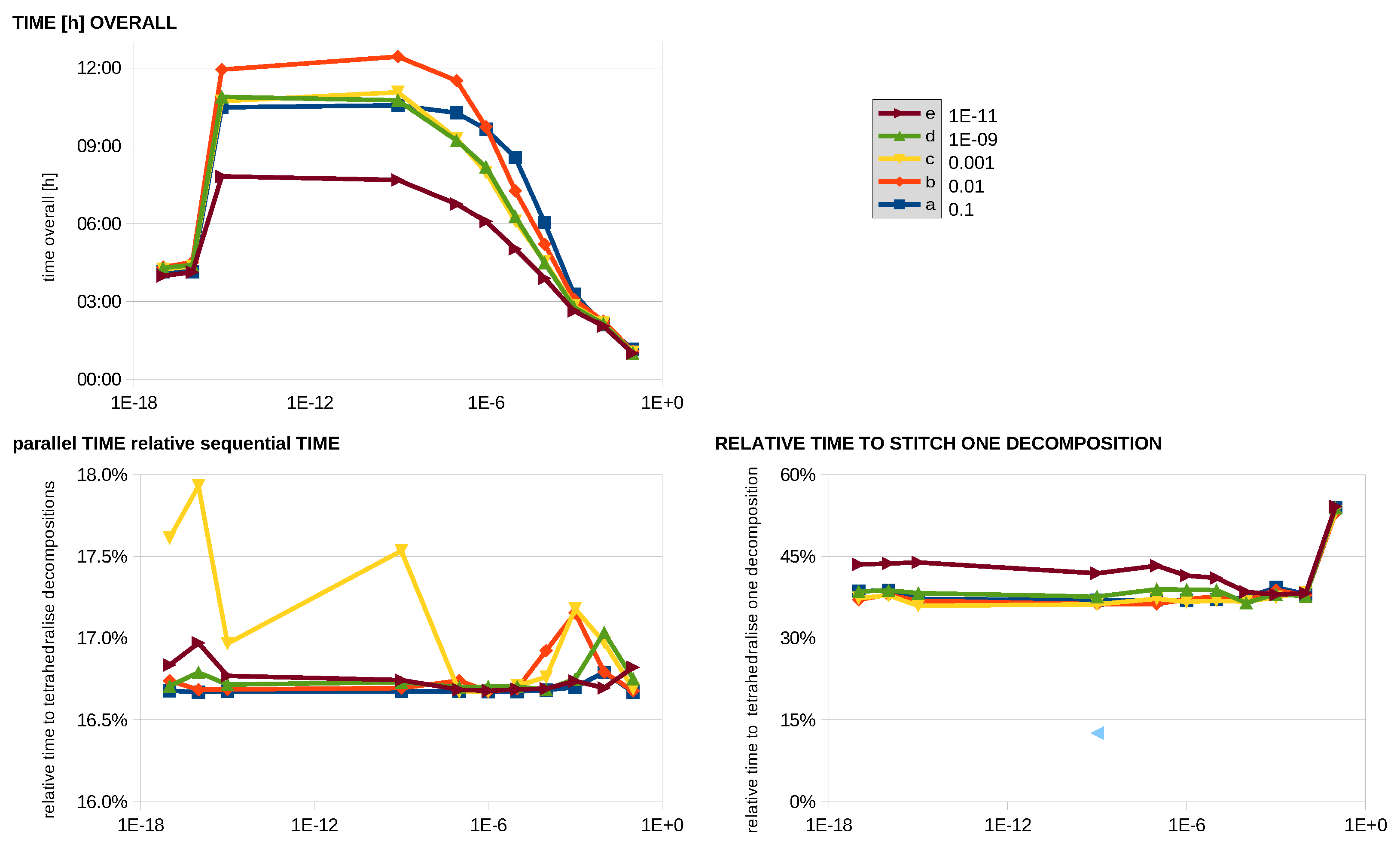
In our sensitivity and uncertainty study, we assume an uncertainty in the precision parameters, and this leads to a multitude of possible configurations which are either topologically consistent or not. In this way, one can determine the resulting topology or value of as a function of the precision parameters.
3.4. Algorithms
The used data model is described in [
3,
9,
10], which also include a brief description of the used data model following the
Property Graph Model, where special node properties have been added in order to support the
Feature Model of the
Open Geospatial Consortium (OGC). Algorithm 1 below, which calculates the disjoint inner of a set of intersecting
d-dimensional simplicial complexes, has been introduced and visualized in [
3]. Article [
3] also includes some straight-forward algorithms to find the intersections or differences of simplicial complexes and provides certain triangulation algorithms of B-Reps based on double precision arithmetic with an
epsilon heuristic inaccuracy model described in [
20]. Article [
3] did not include the description of the algorithms to find B-Reps from a set of
d-dimensional simplicial complexes, which are thought to be topologically consistent, where the corresponding
-space is represented by a sub-set of the property graph, which is derived from the intersections of each
d-dimensional simplicial complex with another. Those algorithms are discussed in the following.
| Algorithm 1: Computing a set of -dimensional simplicial complexes from a set of d-dimensional simplicial complexes—inner disjoint means that the interiors are disjoint. |
input: set of d-dimensional simplicial complexes output: set of inner disjoint -dimensional simplicial complexes - 1
collect -dimensional intersections; - 2
create inner disjoint d-dimensional patch nodes; - 3
create inner disjoint -dimensional seam nodes; - 4
stitch patch nodes which form manifolds and clean up; - 5
stitch seam nodes which share the same patch nodes; - 6
stitch patch nodes to form B-Reps and triangulate them to inner disjoint -dimensional simplicial complexes; - 7
create difference;
|
The complexity of finding all
-dimensional simplicial complex intersections in Step 1 depends on the used spatial access method for the
n input
d-dimensional simplicial complexes. There are
m seams which are all
-dimensional intersections, the borders of each
d-dimensional intersection and the borders of each
d-dimensional simplicial complexes. Creating
k inner disjoint
d-dimensional patches for Step 2 depends on the dimension
d. If
, it also depends on the spatial access method to retrieve the
d-dimensional simplicial complexes, which need to be split by those
m seams. In case of
, the complexity of Step 2 is equal to the complexity of Algorithm 1 with
and
m seams as input, since this algorithm creates the patches from the
m seams recursively. The creation of the spatial access method for the patches needs to be considered within the calculation of complexity. The complexity of Step 3 depends on this spatial access method for
k patches to find all
l seams by intersecting each of the
k patches with another. The creation of the spatial access method for the
m seams needs to be considered, too. Step 5 takes
steps to glue patches to one manifold by iterating over the list of
m seams. Step 6 to stitch patches to form valid B-Reps is parallelized for each seam through Algorithm 2. The complexity of Algorithm 2 will be discussed in the following paragraph.
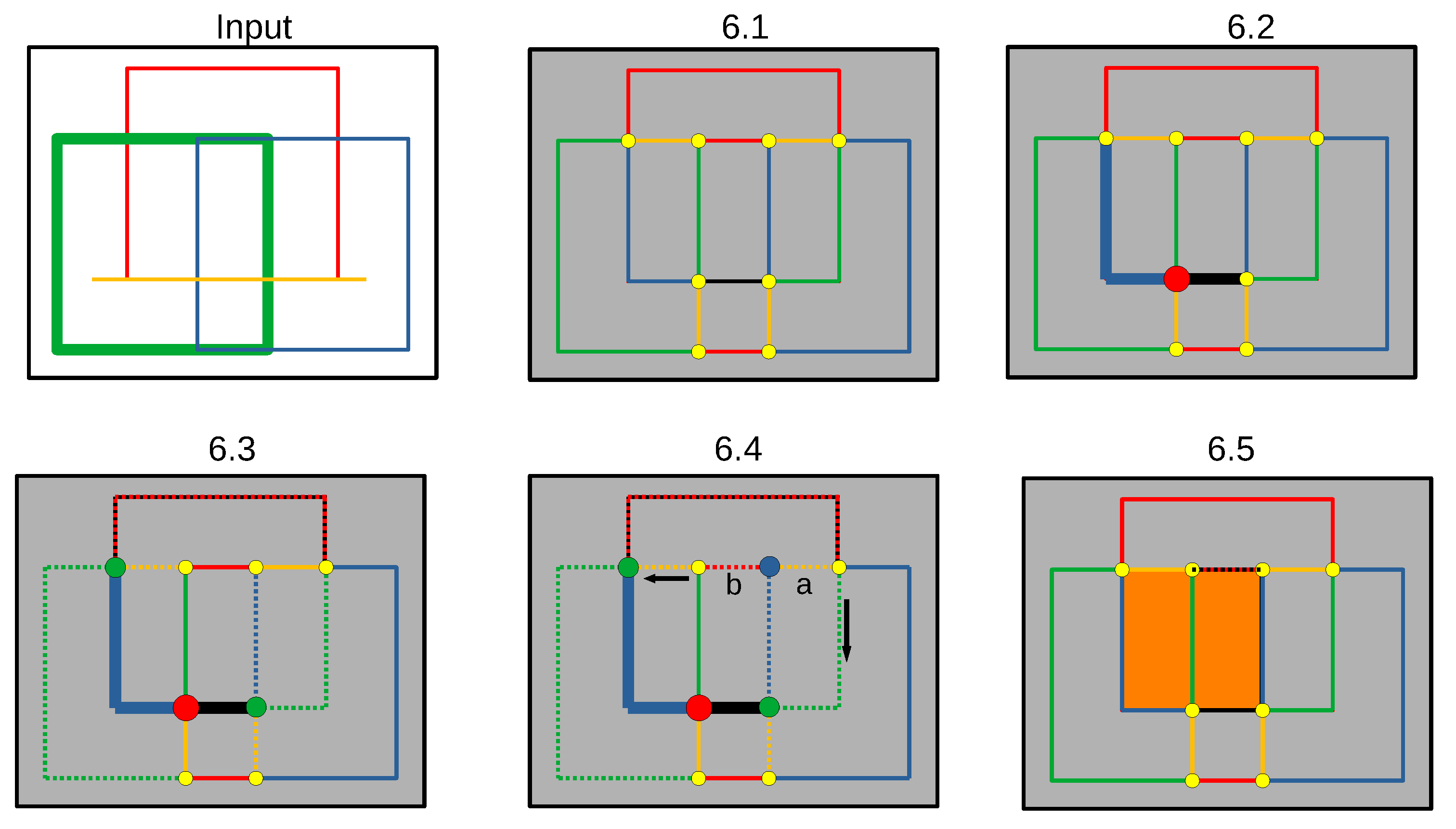
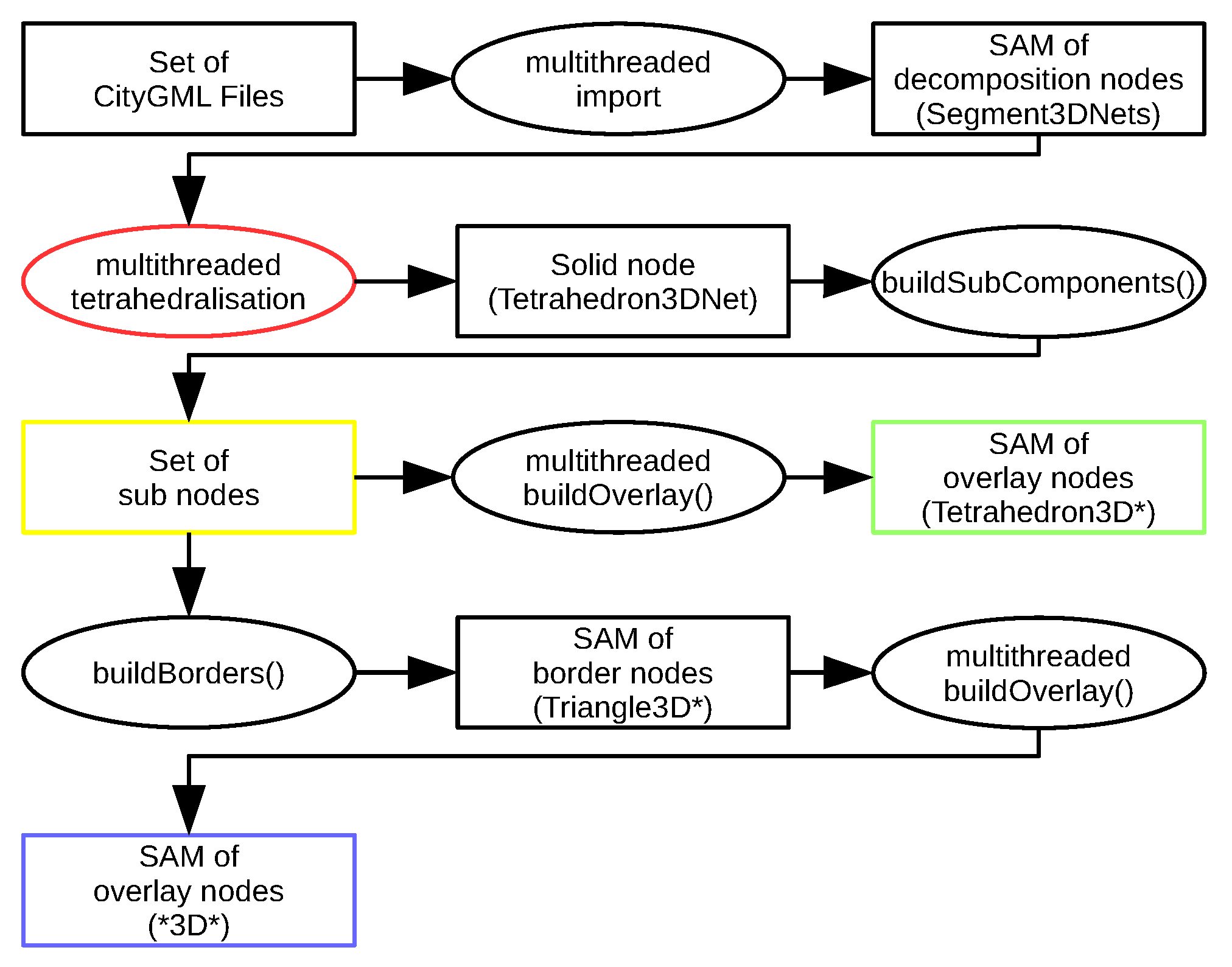
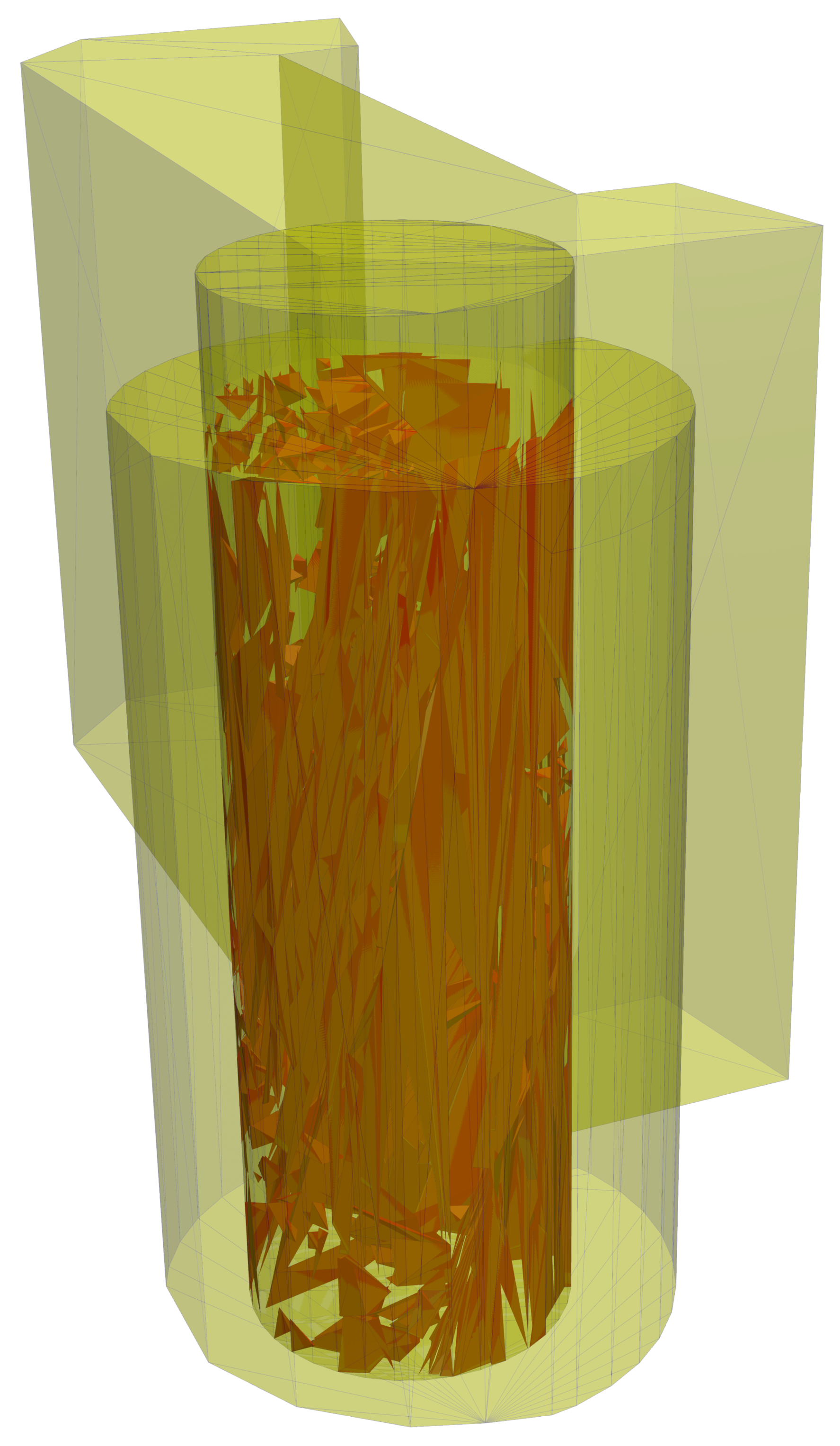
Figure 4 illustrates Algorithm 2 of Step 6 of Algorithm 1. Step 7 of Algorithm 1 depends on the number of patches
w that could not be connected to the
-space. The complexity to calculate the difference to the list of
v inner disjoint
-dimensional simplicial complexes resulting from Step 6 of Algorithm 1 depends on the used spatial access method for
v inner disjoint
-dimensional simplicial complexes queried by
w patches. The creation of the spatial access method for
v inner disjoint
-dimensional simplicial complexes also needs to be considered.
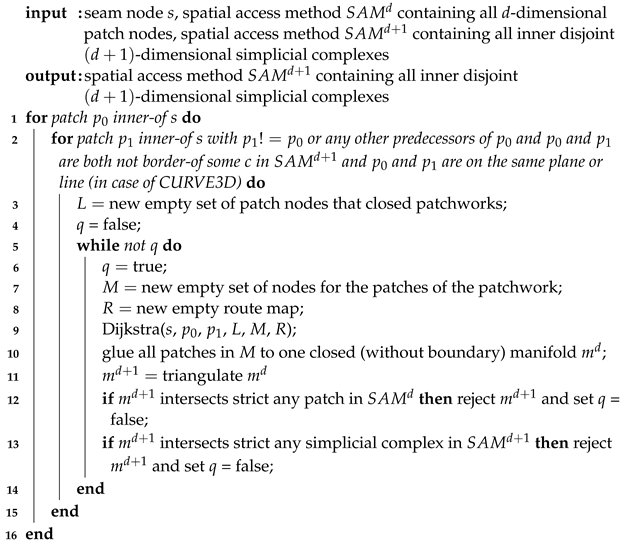
| Algorithm 2: Run() operation of a thread for Step 6 of Algorithm 1—needs to run for every single seam node. |
![Ijgi 11 00224 i001]() |
As mentioned before, Algorithm 2 describes how to find inner disjoint
-dimensional simplicial complexes for each pair of patches which are connected to one specific seam, which realizes Step 6 of Algorithm 1. In the 1-dimensional case, each patch is supposed to be a planar curve. Within the second FOR-loop (see Step 2 of Algorithm 2), patches
will be rejected if it is not on the plane of
. If a plane cannot be defined by patch
(patch lies on a straight line), a plane is defined by
and
for later checks within the Step 9. If a plane cannot be defined by patch
and
, then every
which will be determined within Step 9 may help to define a plane. If a plane was defined before, every
will be ignored in Step 9 that does not lie on that plane. If not, and the union of all patches from Step 9 are not able to define a plane, then all patches are on a straight line, and a triangulation is not possible, since a straight line cannot be closed. However, the step to create a patchwork which can be triangulated to some
-dimensional simplicial complex is Step 9. This step will be discussed in Algorithm 3. After that step, the patchwork is glued to one closed (without boundary)
d-dimensional simplicial complex and triangulated to a
-dimensional simplicial complex. If the patchwork could not be glued to one closed (without boundary)
d-dimensional simplicial complex or the triangulation returned NULL, the algorithm does not try to find more closed (without boundary)
d-dimensional simplicial complexes for the patches
and
. If the triangulation was performed successfully, the resulting
-dimensional simplicial complex is tested as follows. If the resulting
-dimensional simplicial complex strictly contains any patch or strictly intersects any previously created
-dimensional simplicial complex (see Steps 12 and 13), the final patch that closed the corresponding
d-dimensional simplicial complex within Step 9 is added to a set of patches for the patches that closed any of the previously generated patchworks. Those patches will be ignored for the next trials of Step 9.
| Algorithm 3: Dijkstra(s, , , L, M, R) operation—Step 9 of Algorithm 2. |
![Ijgi 11 00224 i002]() |
Step 9 of Algorithm 2 follows the idea of a Dijkstra algorithm with edge values of one as first straight forward implementation (see Algorithm 3) to find closed loops within the
-space. The set of loops represents balls containing the two patches
and
and the connecting border seam
s. Any loop may fulfill the geometrical constraint (see Steps 12 and 13 of Algorithm 2). In fact, it is possible that the longest loop may fulfill the geometrical constraint only. Therefore, it is not the purpose to find the shortest loop here. It is a fact that most path-finding algorithm have a similar idea as Dijkstra’s, which is explained as follows. Let
B be the set of borders from two patches
and
without the connecting border seam
s. Algorithm 3 starts with this set of borders by the use of a Queue. This is a collection designed for holding elements prior to processing (with first in first out). The seam
s functions as a barrier. Following the relations of the
-space, each border is connected to a set of patches. However, each border needs to be stitched to only two patches in order to fulfill the manifold constraint. The first patch is where the Dijkstra comes from, and the second patch is where the Dijkstra goes to. As mentioned before, in case the patches are planar curves, only patches are taken into account which lie on the previously defined plane. If a plane was not defined, each of the patches may help to define a plane. However, the patches themselves are bounded by some border seams also. Each patch will be added by Algorithm 4. If this algorithm returns “true” then the second patch closed the
d-dimensional simplicial complex or a path back to some border(s) in
B. Algorithm 4 returns “true” only if a non-self-intersecting loop was found. The patch is added to the set of patches
M which represents the resulting patchwork. The complexity of Algorithm 4 depends on the number of interconnected borders and patches. The worst case would be that the non-self-intersecting loop with the most edges in the
-space forms the
d-dimensional simplicial complex, which fulfils the constraints of Steps 12 and 13 of Algorithm 2.
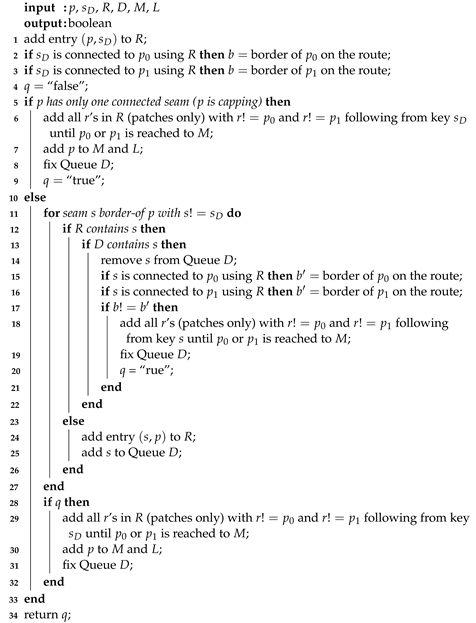
| Algorithm 4: addPatch(p, , R, D, M, L) operation—Step 12 of Algorithm 3. |
![Ijgi 11 00224 i003]() |
Algorithm 4 checks if one of those new border seams was already visited and is connected to a different border seam within B. If so, a loop is found. It may happen that the second patch is bounded by only one border. This patch is like a capping and closes the border it is connected to the hole of the first patch. However, if a second patch like this or a loop was found, all the patches of this loop or the path back to the seam s are added to the result set M. If the second patch brings in some new borders, then they need to be closed in the same manner. Algorithm 4 filters the set of borders D which need to be visited in the next step of the Dijkstra if any second patch was found. All borders which contain any patches in M on their path back to the seam s are rejected. On the other hand, all new borders of the second patch need to be added to D if the second patch contains borders which need to be closed.
If a seam is connected to n patches, the complexity will be times the complexity within the two for loops (see Algorithm 2). If there are k closed (without boundary) d-dimensional simplicial complexes which can be triangulated to k-dimensional simplicial complexes, then it takes steps to find the one which fulfills the two constraints (see Step 12 and 13) in the worst case. The worst case is that the d-dimensional simplicial complex consists of the maximal number of patches relative to the other d-dimensional simplicial complexes. This one would be found at last within the Step 9. The Dijkstra itself will take for m patches.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}