

Ship Target Recognition Based on Context-Enhanced Trajectory
Abstract
1. Introduction
2. State-of-the-Art Review
3. Problem Description
4. Approach
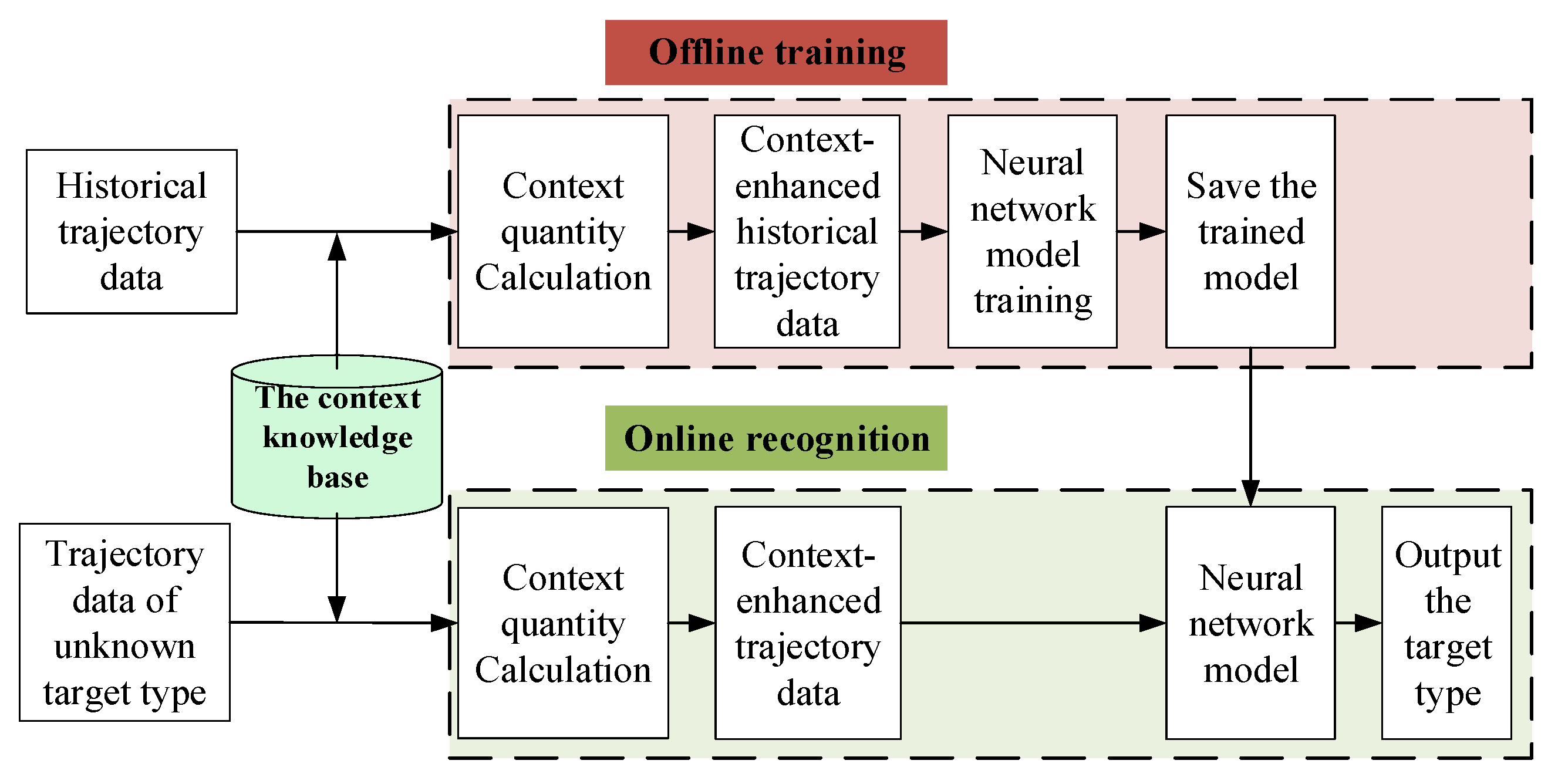
4.1. The Overall Process
4.2. Context Knowledge Base
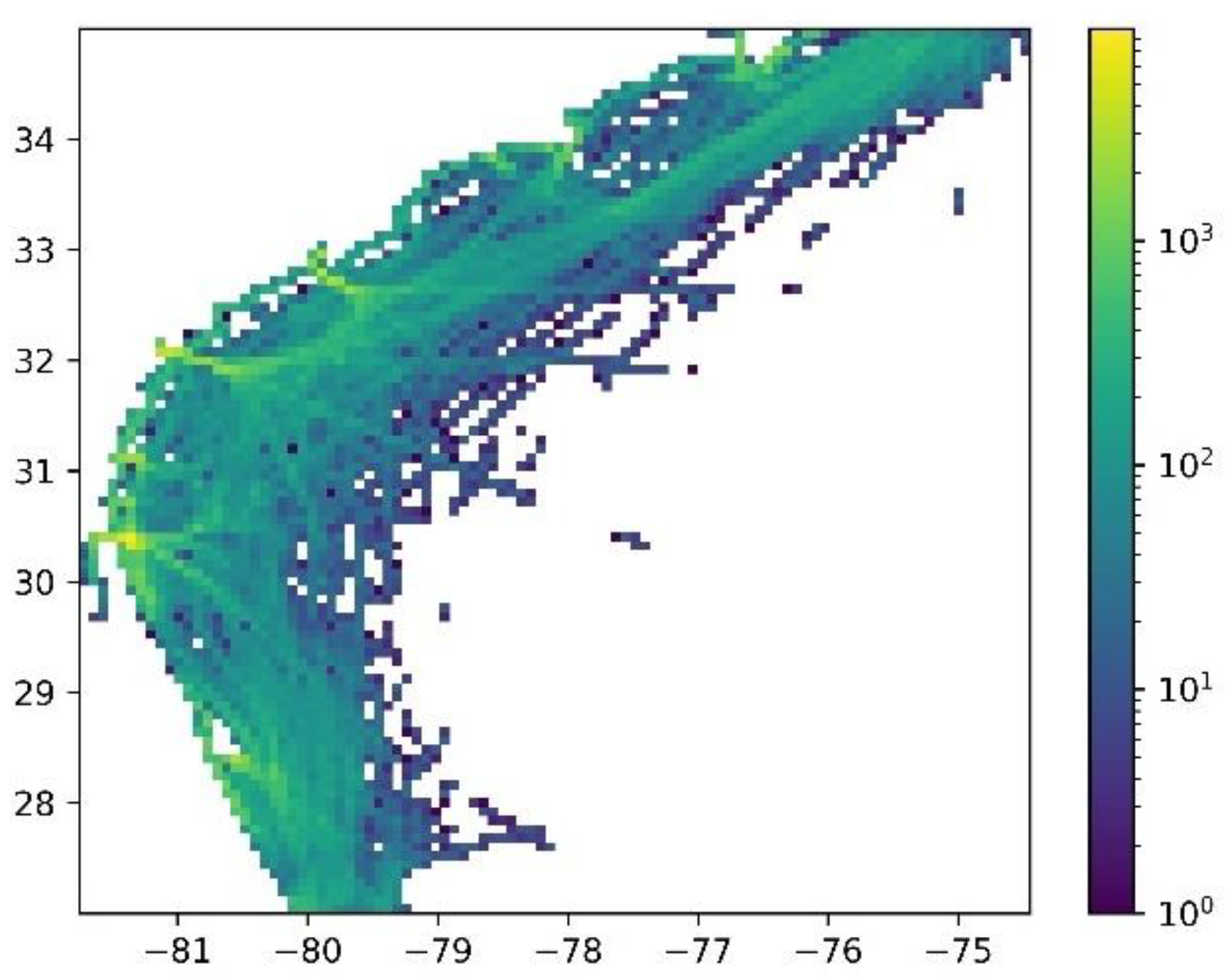
4.2.1. Maritime Traffic Density
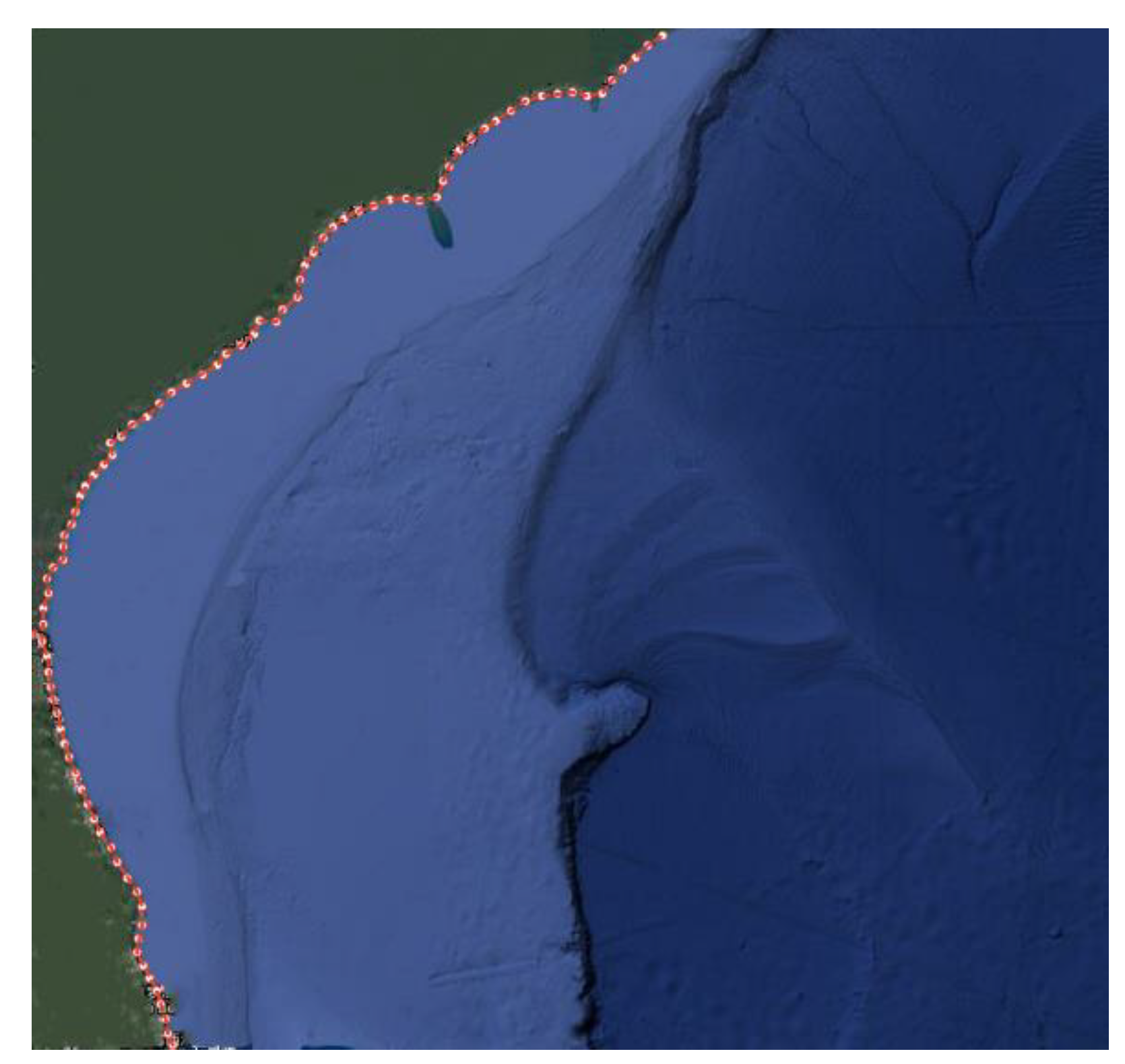
4.2.2. Distance from Target to Shore
4.2.3. Distances from Target to Ports
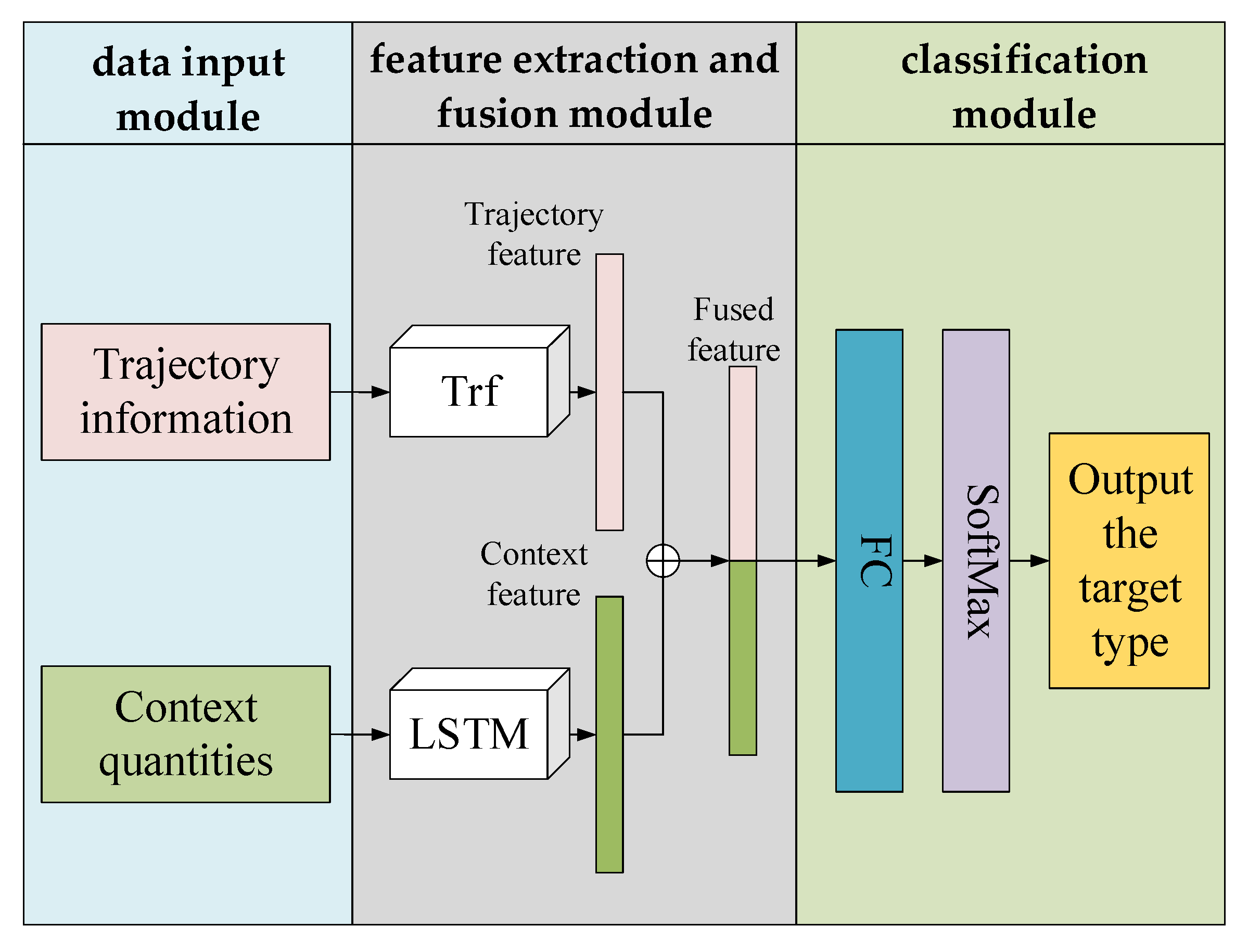
4.3. Neural Network Model
5. Data Preparation
5.1. Trajectory Data Preprocessing
5.2. Context Knowledge Base Construction and Context Quantity Calculation
5.2.1. Maritime Traffic Density (td)
5.2.2. Distance from Target to Shore (ds)
5.2.3. Distances from Target to Ports
5.3. Normalization
6. Experiments and Discussion
6.1. Validation of Context Enhancement
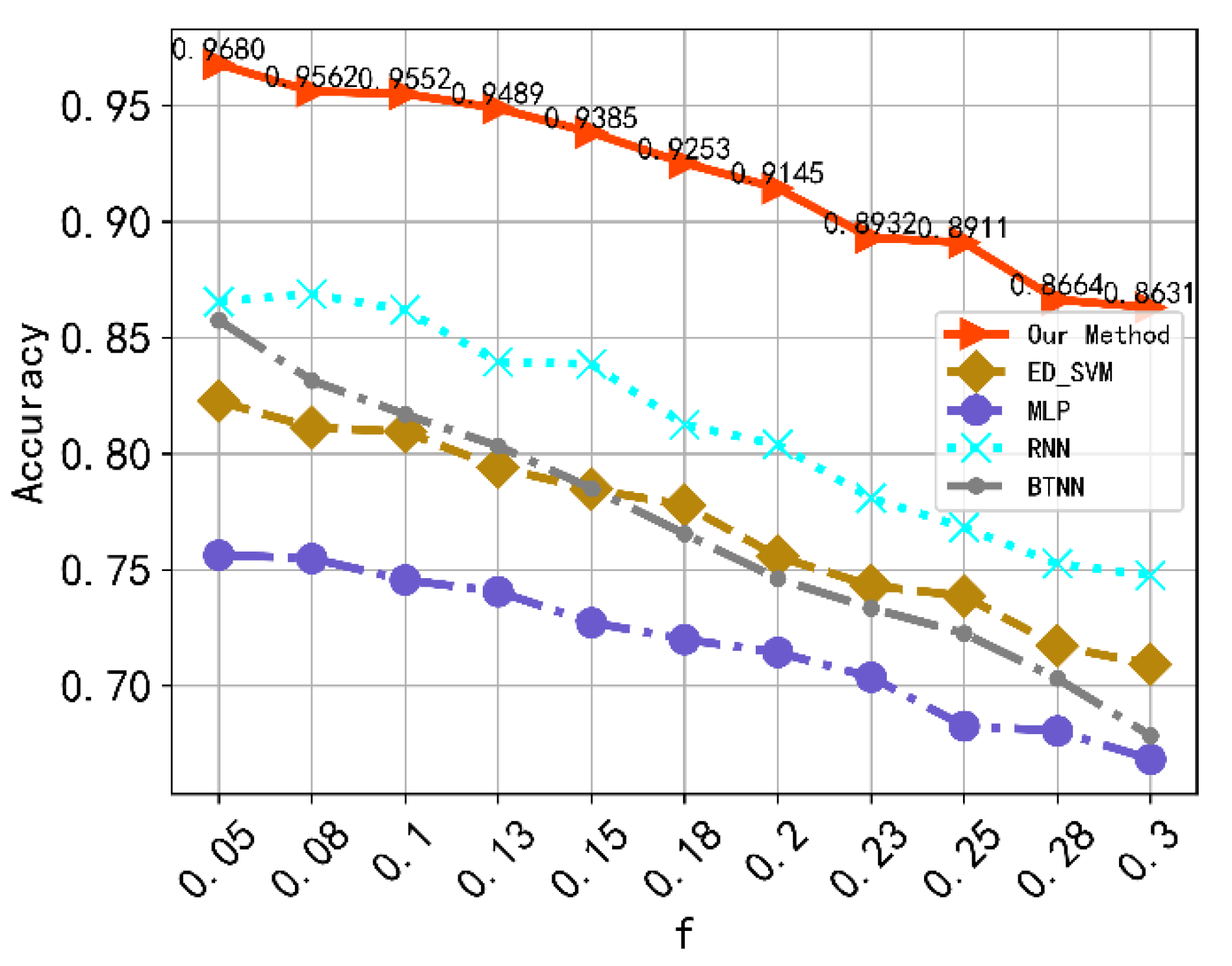
6.2. Contrast Experiments
6.3. Validation on Other Maritime Area Datasets
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zou, Y.; Zhao, L.; Qin, S.; Pan, M.; Li, Z. Ship target detection and identification based on SSD_MobilenetV2. In Proceedings of the 2020 IEEE 5th Information Technology and Mechatronics Engineering Conference (ITOEC), Chongqing, China, 12–14 June 2020. [Google Scholar]
- Zhang, D.; Zhan, J.; Tan, L.; Gao, Y.; Župan, R. Comparison of two deep learning methods for ship target recognition with optical remotely sensed data. Neural Comput. Appl. 2021, 33, 4639–4649. [Google Scholar] [CrossRef]
- Salerno, E. Using Low-Resolution SAR Scattering Features for Ship Classification. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–4. [Google Scholar] [CrossRef]
- Lee, S.J.; Lee, K.J.; Sensing, R. Efficient Generation of Artificial Training DB for Ship Detection Using Satellite SAR Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 11764–11774. [Google Scholar] [CrossRef]
- Chuang, L.Z.-H.; Chen, Y.-R.; Chung, Y.-J. Applying an Adaptive Signal Identification Method to Improve Vessel Echo Detection and Tracking for SeaSonde HF Radar. Remote Sens. 2021, 13, 2453. [Google Scholar] [CrossRef]
- Chen, J.S.; Dao, D.T.; Chien, H. Ship Echo Identification Based on Norm-Constrained Adaptive Beamforming for an Arrayed High-Frequency Coastal Radar. IEEE Trans. Geosci. Remote Sens. 2020, 59, 1143–1153. [Google Scholar] [CrossRef]
- Wang, W.; Xia, F.; Nie, H.; Chen, Z.; Gong, Z.; Kong, X.; Wei, W. Vehicle trajectory clustering based on dynamic representation learning of internet of vehicles. IEEE Trans. Intell. Transp. Syst. 2020, 22, 3567–3576. [Google Scholar] [CrossRef]
- Noyes, S.P. Track classification in a naval defence radar using fuzzy logic. In Proceedings of the Target Tracking & Data Fusion, Birmingham, UK, 9 June 1998. [Google Scholar]
- Kouemou, G.; Opitz, F. Radar target classification in littoral environment with HMMs combined with a track based classifier. In Proceedings of the International Conference on Radar, Adelaide, SA, Australia, 2–5 September 2008. [Google Scholar]
- Ghadaki, H.; Dizaji, R. Target track classification for airport surveillance radar (ASR). In Proceedings of the 2006 IEEE Conference on Radar, Verona, NY, USA, 24–27 April 2006. [Google Scholar]
- Bakkegaard, S.; Blixenkrone-Moller, J.; Larsen, J.J.; Jochumsen, L. Target Classification Using Kinematic Data and a Recurrent Neural Network. In Proceedings of the 2018 19th International Radar Symposium (IRS), Bonn, Germany, 20–22 June 2018. [Google Scholar]
- Ichimura, S.; Zhao, Q. Route-Based Ship Classification. In Proceedings of the 2019 IEEE 10th International Conference on Awareness Science and Technology (iCAST), Morioka, Japan, 23–25 October 2019. [Google Scholar]
- Stenneth, L.; Wolfson, O.; Yu, P.S.; Xu, B. Transportation mode detection using mobile phones and GIS information. In Proceedings of the 19th ACM SIGSPATIAL International Conference on Advances in Geographic Information, Chicago, IL, USA, 1–4 November 2011. [Google Scholar]
- Siła-Nowicka, K.; Vandrol, J.; Oshan, T.; Long, J.A.; Demšar, U.; Fotheringham, A.S. Analysis of human mobility patterns from GPS trajectories and contextual information. Int. J. Geogr. Inf. Sci. 2016, 30, 881–906. [Google Scholar] [CrossRef]
- Buchin, M.; Dodge, S.; Speckmann, B.J.S. Context-Aware Similarity of Trajectories. In Proceedings of the International Conference on Geographic Information Science, Columbus, OH, USA, 18–21 September 2012. [Google Scholar]
- Ahearn, S.C.; Dodge, S.; Simcharoen, A.; Xavier, G.; Smith, J.L. A context-sensitive correlated random walk: A new simulation model for movement. Int. J. Geogr. Inf. Sci. 2017, 31, 867–883. [Google Scholar] [CrossRef]
- Bagnall, A.; Lines, J.; Hills, J.; Bostrom, A. Time-series classification with COTE: The collective of transformation-based ensembles. IEEE Trans. Knowl. Data Eng. 2015, 27, 2522–2535. [Google Scholar] [CrossRef]
- Lines, J.; Bagnall, A. Time series classification with ensembles of elastic distance measures. Data Min. Knowl. Discov. 2015, 29, 565–592. [Google Scholar] [CrossRef]
- Hills, J.; Lines, J.; Baranauskas, E.; Mapp, J.; Bagnall, A. Classification of time series by shapelet transformation. Data Min. Knowl. Discov. 2013, 28, 851–881. [Google Scholar] [CrossRef]
- Serrano-Guerrero, J.; Romero, F.P.; Olivas, J.A. Fuzzy logic applied to opinion mining: A review. Knowledge-Based Syst. 2021, 222, 107018. [Google Scholar] [CrossRef]
- Reddy, G.T.; Reddy, M.; Lakshmanna, K.; Rajput, D.S.; Kaluri, R.; Srivastava, G. Hybrid genetic algorithm and a fuzzy logic classifier for heart disease diagnosis. Evol. Intell. 2020, 13, 185–196. [Google Scholar] [CrossRef]
- Ahn, S.; Couture, S.V.; Cuzzocrea, A.; Dam, K.; Grasso, G.M.; Leung, C.K.; McCormick, K.L.; Wodi, B.H. A fuzzy logic based machine learning tool for supporting big data business analytics in complex artificial intelligence environments. In Proceedings of the 2019 IEEE international conference on fuzzy systems (FUZZ-IEEE), New Orleans, LA, USA, 23–26 June 2019; pp. 1–6. [Google Scholar]
- Mohajerin, N.; Histon, J.; Dizaji, R.; Waslander, S.L. Feature extraction and radar track classification for detecting UAVs in civillian airspace. In Proceedings of the 2014 IEEE Radar Conference (RadarCon), Cincinnati, OH, USA, 19–23 May 2014. [Google Scholar]
- Espindle, L.P.; Kochenderfer, M. Classification of primary radar tracks using Gaussian mixture models. IET Radar Sonar Navig. 2010, 3, 559–568. [Google Scholar] [CrossRef]
- Sheng, K.; Liu, Z.; Zhou, D.; He, A.; Feng, C. Research on Ship Classification Based on Trajectory Features. J. Navig. 2017, 71, 100–116. [Google Scholar] [CrossRef]
- Yumu, D.; Sarikaya, T.B.; Efe, M.; Soysal, G.; Kirubarajan, T. Track Based UAV Classification Using Surveillance Radars. In Proceedings of the 2019 22th International Conference on Information Fusion (FUSION), Ottawa, ON, Canada, 2–5 July 2019. [Google Scholar]
- Maguire, D.J. An overview and definition of GIS. Princ. Appl. 1991, 1, 9–20. [Google Scholar]
- Wang, H.; Liu, Z.; Liu, Z.; Wang, X.; Wang, J. GIS-based analysis on the spatial patterns of global maritime accidents. Ocean. Eng. 2022, 245, 110569. [Google Scholar] [CrossRef]
- Zhou, X.; Cheng, L.; Li, M. Assessing and mapping maritime transportation risk based on spatial fuzzy multi-criteria decision making: A case study in the South China sea. Ocean Eng. 2020, 208, 107403. [Google Scholar] [CrossRef]
- Lv, Y.; Xiong, W.; Zhang, X.; Cui, Y. Fusion-based correlation learning model for cross-modal remote sensing image retrieval. IEEE Geosci. Remote Sens. Lett. 2021, 19, 1–5. [Google Scholar] [CrossRef]
- Lv, Y.; Zhang, X.; Xiong, W.; Cui, Y.; Cai, M. An End-to-End Local-Global-Fusion Feature Extraction Network for Remote Sensing Image Scene Classification. Remote Sens. 2019, 11, 3006. [Google Scholar] [CrossRef]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention is all you need. In Proceedings of the Advances in Neural Information Processing Systems, Long Beach, CA, USA, 4–9 December 2017; pp. 5998–6008. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- De Vries, G.K.D.; Van Someren, M. Machine learning for vessel trajectories using compression, alignments and domain knowledge. Expert Syst. Appl. 2012, 39, 13426–13439. [Google Scholar] [CrossRef]
- Kong, Z.; Cui, Y.; Xiong, W.; Yang, F.; Xiong, Z.; Xu, P. Ship Target Identification via Bayesian-Transformer Neural Network. J. Mar. Sci. Eng. 2022, 10, 577. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kong, Z.; Cui, Y.; Xiong, W.; Xiong, Z.; Xu, P. Ship Target Recognition Based on Context-Enhanced Trajectory. ISPRS Int. J. Geo-Inf. 2022, 11, 584. https://doi.org/10.3390/ijgi11120584
Kong Z, Cui Y, Xiong W, Xiong Z, Xu P. Ship Target Recognition Based on Context-Enhanced Trajectory. ISPRS International Journal of Geo-Information. 2022; 11(12):584. https://doi.org/10.3390/ijgi11120584
Chicago/Turabian StyleKong, Zhan, Yaqi Cui, Wei Xiong, Zhenyu Xiong, and Pingliang Xu. 2022. "Ship Target Recognition Based on Context-Enhanced Trajectory" ISPRS International Journal of Geo-Information 11, no. 12: 584. https://doi.org/10.3390/ijgi11120584
APA StyleKong, Z., Cui, Y., Xiong, W., Xiong, Z., & Xu, P. (2022). Ship Target Recognition Based on Context-Enhanced Trajectory. ISPRS International Journal of Geo-Information, 11(12), 584. https://doi.org/10.3390/ijgi11120584