
Improving Room-Level Location for Indoor Trajectory Tracking with Low IPS Accuracy †


Abstract
:1. Introduction
- We conduct an in-depth analysis of room-level localization to emphasize the importance of room-level (or region-level) map matching.
- We formulate the unit space map matching (USMM) problem as the hidden Markov model that utilized indoor map, user trajectory, and IPS’ characteristic information.
- We design and implement several USMM methods based on the hidden Markov model. Additionally, we design and implement preprocess methods to improve its accuracy.
- We evaluate USMM with a huge synthetic dataset and a real dataset collected by commercial IPS with Android-based smartphones in actual buildings to compare and analyze the proposed methods of accuracy and performance. The experiments show that the proposed methods show significant improvements in accuracy, mainly when indoor positioning accuracy is low.
2. Related Work
2.1. Symbolic Space Modeling
- First, symbolic information provides a qualitative, human-readable description of moving objects based on structural things or points of interest (e.g., room or floor identifiers).
- Symbolic location models can reveal explicitly topological relationships between entities in the environment, such as containment, connectivity, closeness, and overlapping depending on their nature, in contrast to geometric information.
- Last, symbolic representation enables spatial and semantic reasoning at an abstract level, supporting interactions between spatial objects within indoor spaces.
2.2. Room-Level Indoor Localization
- The first approach is mainly focused on filtering the sensor values. Various researches have been done so far in [41,42,43,44,45,46]. Most studies have improved positioning accuracy by filtering the values of access point (AP) signal or smartphone sensors (acceleration, gyroscope, etc.) used in the pedestrian dead reckoning (PDR) method. WILL [41] is a system that uses the PDR to determine the indoor location using APs with different Received Signal Strength (RSS) for each room. WILL considered the room’s characteristics and the relationship between rooms, but eventually, it is aimed at the coordinate level, and the positioning accuracy is ~80%. In [45], the authors proposed a Bluetooth Low Energy (BLE) beacon-based indoor navigation system for visual impairments person. The proposed system utilized the fuzzy logic framework for estimating the user’s position. The authors analyzed the performance of various versions of the fingerprinting algorithm, including fuzzy logic type 1, fuzzy KNN, fuzzy logic type 2, and traditional methods such as proximity, trilateration, the centroid for indoor localization. The fuzzy logic type 2 method outperformed all other methods; the average localization error obtained in this approach is just 0.43 m. In [46], Son et al. proposed a magnetic vector calibration algorithm that can compensate for the change of the moving direction or the grip position of a user in the three-dimensional space. As the experiment evaluation, the proposed algorithm achieves higher positioning accuracy (average positioning error is 0.66 m) and faster initial positioning because the vector fingerprint is more identifiable compared to the magnitude fingerprint.
- The second approach focuses on improving location accuracy using sensor information and map information as well as additional contextual information (landmarks, points of interest, human activity awareness, etc.). Several studies have been conducted in this regard [47,48]. APFiLoc [47] has conducted research to improve location accuracy by combining existing Wi-Fi- and PDR-based location systems with indoor landmark information (elevators, stairs, etc.). Positioning issues based on PDR with accumulated positioning errors are resolved through landmarks, and positioning accuracy is 80% when people hold their phones.
- The final approach is to improve location accuracy, using additional multimedia information (images, video, etc.). Likewise, several studies have been carried out in connection with the works in [49,50,51]. Radaelli’s research corrected the position measurement results in coordinate units, but it improved the accuracy at the room level [49]. It used a camera installed in the corridor and processed the image data to track moving objects and entrances. It corrected the location coordinates by combining the location information created using Wi-Fi wireless maps to track moving objects. However, the accuracy has not improved significantly.
- A large number of indoor positioning approaches use Wi-Fi technology to take advantage of the densely installed wireless Access Points (APs) in urban areas. Biehl et al. [55] presented the LoCo framework that can provide highly accurate room-level location using a supervised classification scheme to provide high accuracy indoor room classification based on the relative ordering of pairs of APs by RSSI. A modified AdaBoost [59] algorithm was used for room-level location estimation. They trained a classifier per room in the “one-versus-all” formulation and reported 94% accuracy. However, AdaBoost is a boosting technique that cannot be parallelized for training as well as predicting. The “one-versus-all” required computation for every room. It makes Loco’s response time dependent on the building size and the number of rooms per building. Therefore, the response time of LoCo worsens directly in proportion to the number of rooms.
- Bluetooth-based positioning is also a usual approach to room-level localization. Naya et al. [52] proposed a Bluetooth-based indoor proximity detection method for nursing context-awareness. It exploits proximity between Bluetooth devices attached to people and objects for estimating room-level proximity of people and objects. The introduction of Bluetooth Low Energy (BLE) provided even more opportunities for indoor localization. Kyritsis et al. [56] presented an easy to set up BLE-based system for room localization while keeping the cost as minimal as possible. This work used RSSI of the BLE beacon and the geometry of the rooms the beacons are placed. It shows an improvement in room estimation accuracy, especially in the boundary locations of the rooms. This work’s major disadvantage is that it necessary extra devices such as BLE beacons only for positioning.
- Another way of indoor localization is by using ultrasound signals. Inspired by bats that use those signals to navigate at night, several such systems have been developed. Jaen et al. [57] performed room-level indoor positioning using different acoustic impulse responses depending on each room’s usage and structure. It can achieve very high accuracy, except for the living room. However, most of these studies require not only smartphones, but also individual devices or applications.
3. Preliminaries
3.1. Map Matching in Indoor Space
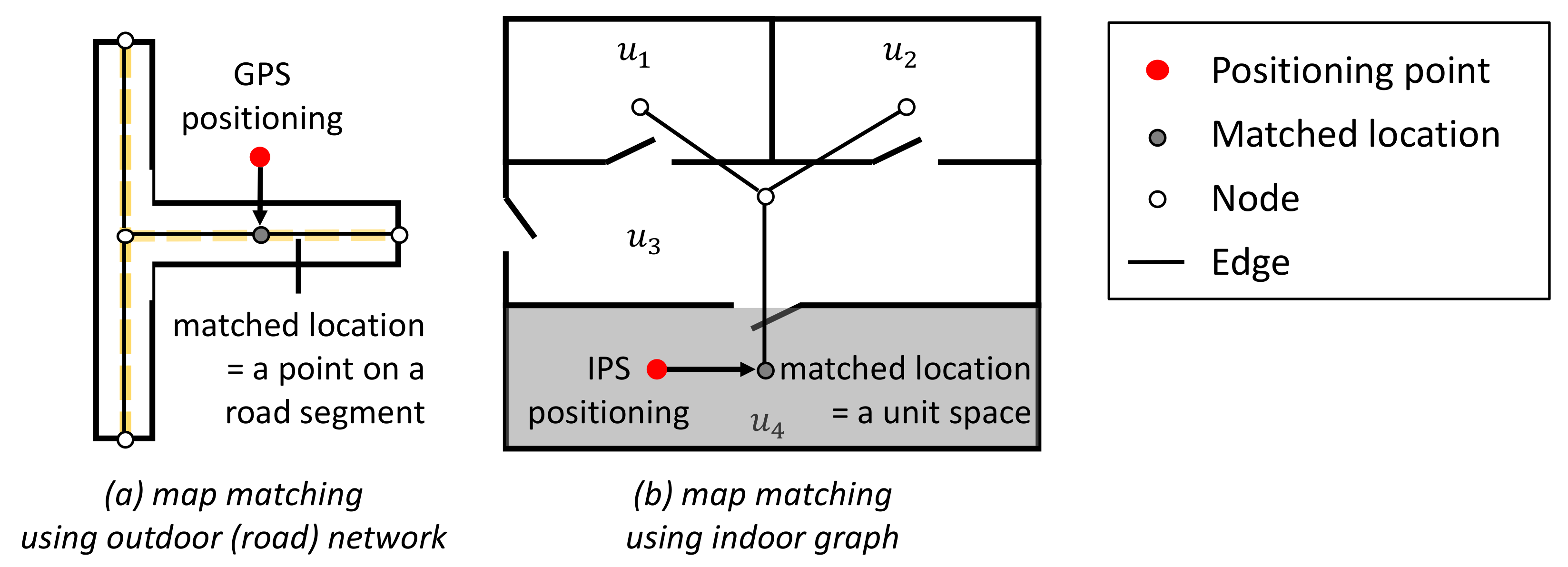
- Extract the relevant information (e.g., latitude, longitude, speed, and heading) from the record received from the IPS.
- Select the candidate unit space from the digital indoor map. Usually, the unit spaces that are within a certain error distance of the IPS position are selected.
- Use algorithm-specific heuristics to determine the most suitable unit space among the candidate unit spaces. Common weighting criteria include weight for the proximity of unit space and weight for the topology of unit spaces.
3.2. Indoor Space Locations
- Each unit space has a unique symbolic code, such as room number.
- Each unit space has a two-dimensional polygon .
- For any pairs of units , can touches but cannot intersects.
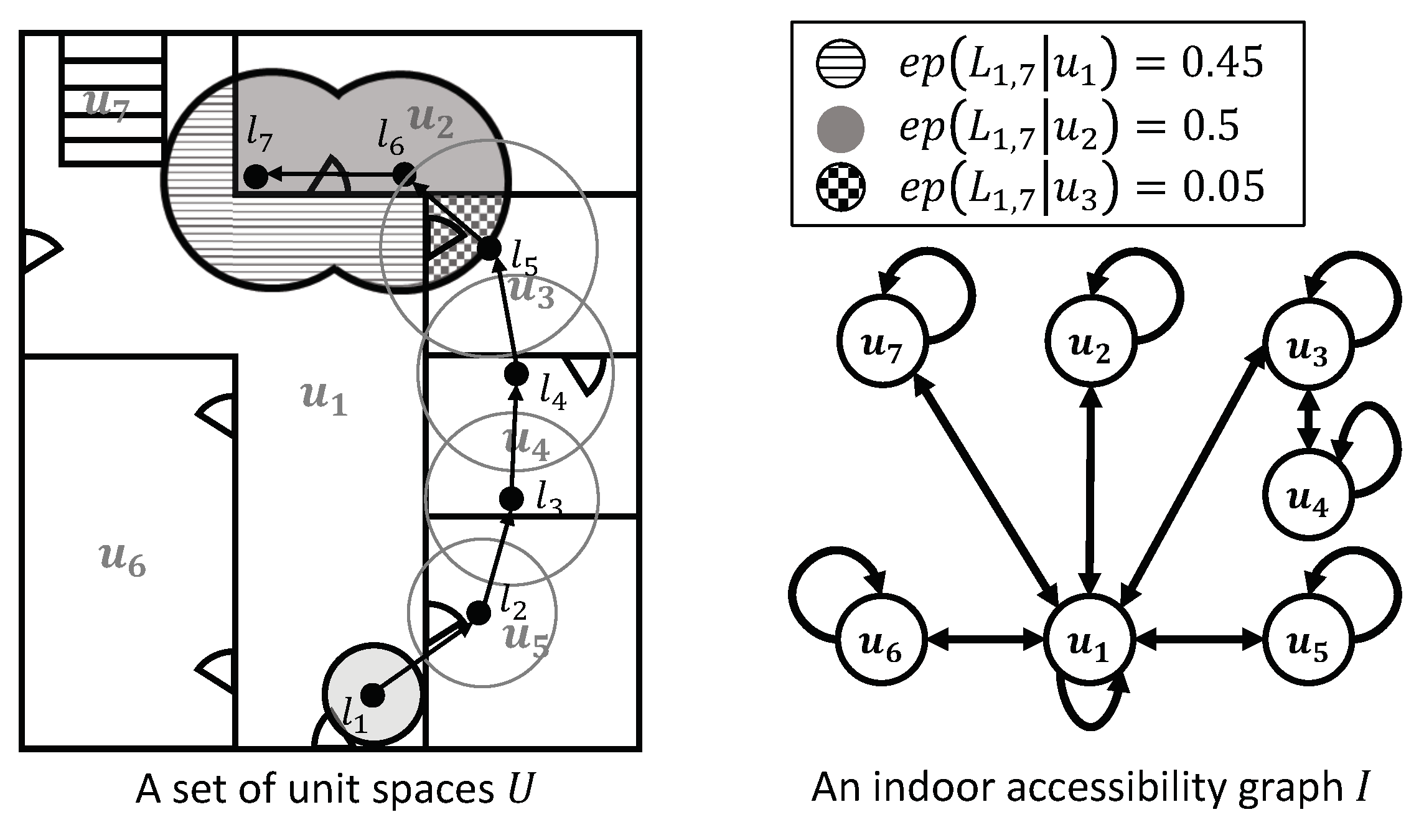
- A directed edge exists if two unit spaces () are adjacent, connected, and no other space between and , where . Note that the adjacency between two unit spaces means touches .
- has a weight , which means a pass probability from unit space to .
- always exist.
3.3. Unit Space Map Matching as the Nearest One
3.4. Vague Location
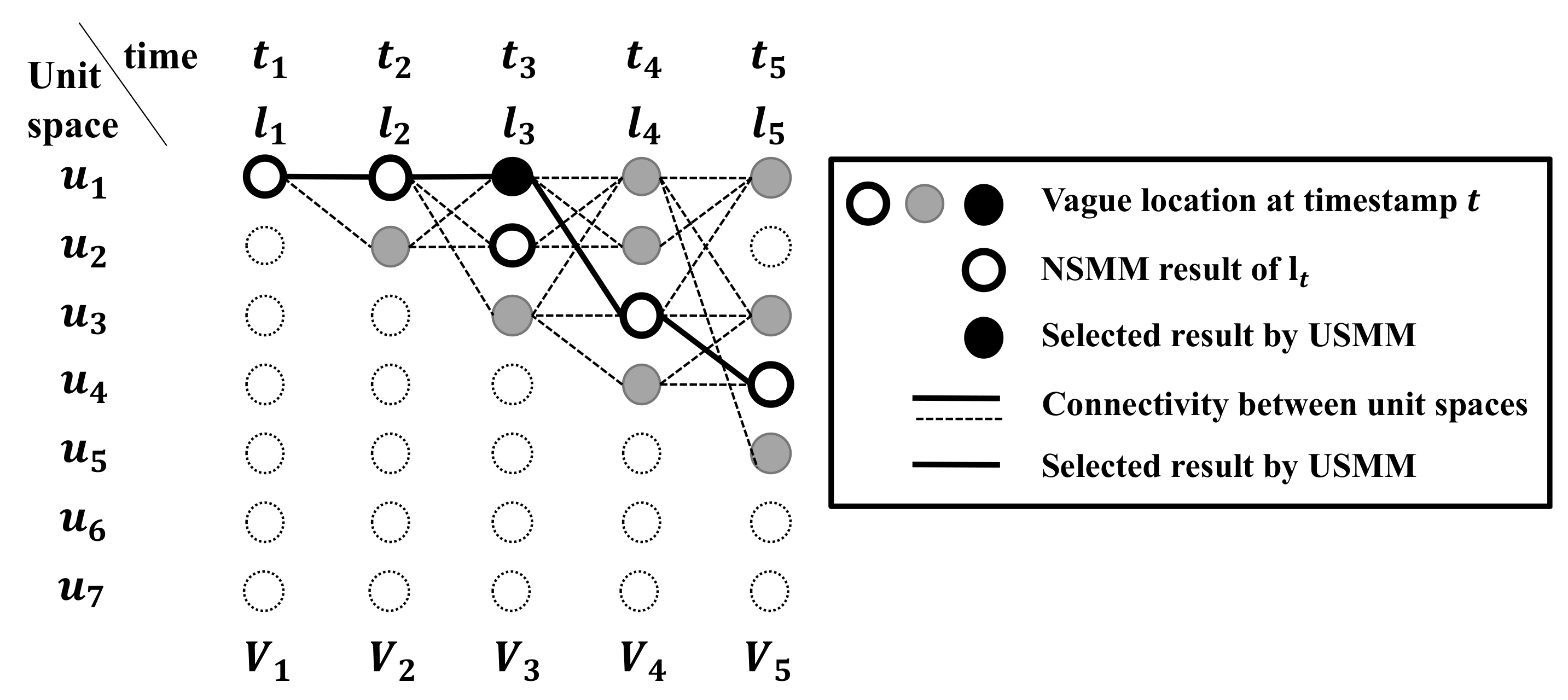
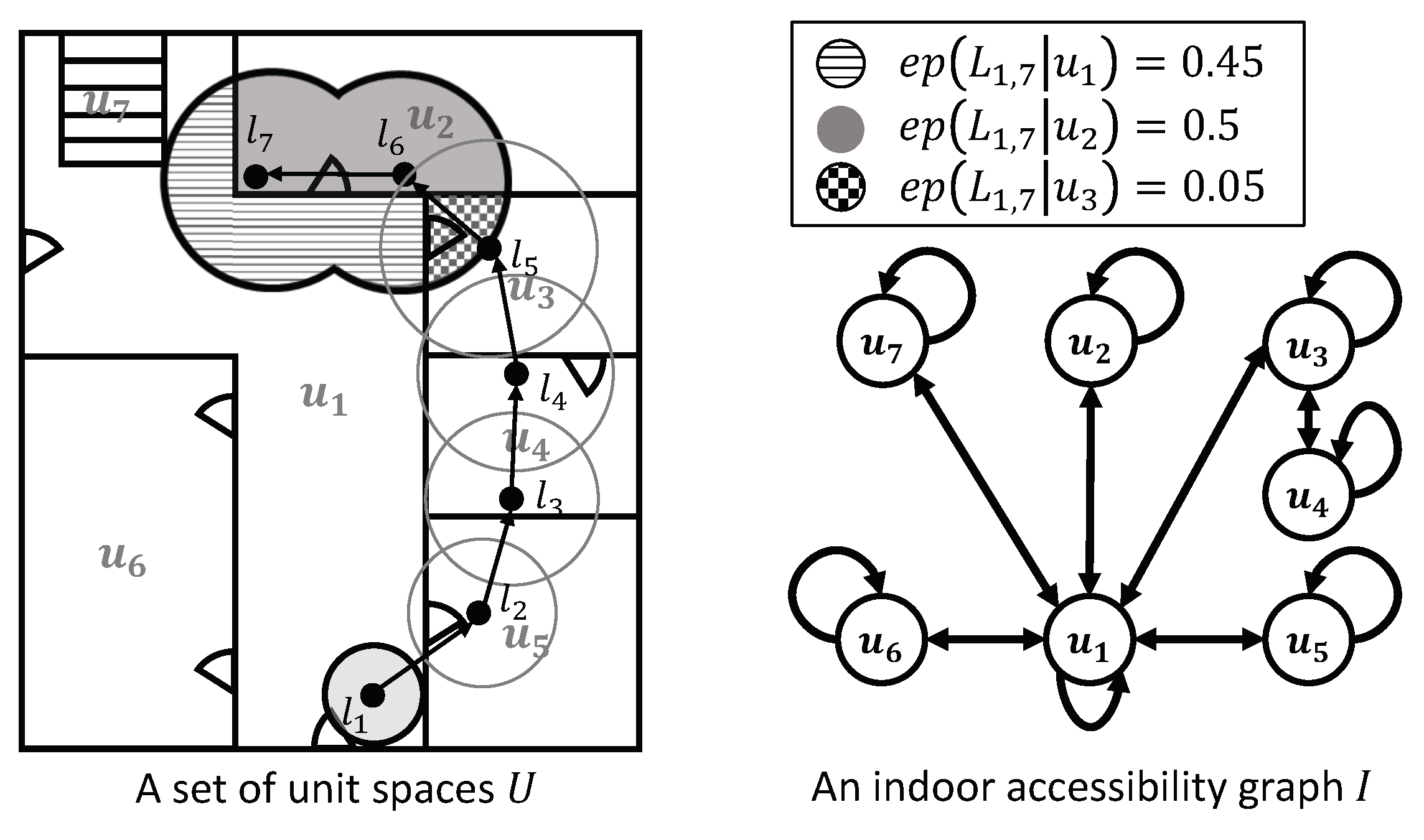
- is an IPS trajectory,
- is an indoor accessibility graph, and
- is a set of vague locations, consists of a tuple where . represents a likelihood of be located in at timestamp .
3.5. Problem Formulation
3.6. Requirements
- Accuracy
- When calculating the map matching accuracy for the input trajectory, USMM aims at improving the accuracy much higher than the NSMM. Even if the accuracy of the indoor positioning method is not good, the USMM method should provide a stable and high accuracy.
- Performance
- USMM should be executed within a sampling interval of IPS in mobile devices to support real-time indoor location-based services. In most cases, the sampling interval is 1 second by default.
- Data Size
- As USMM runs on mobile devices such as smartphones, the size of prepared data needed by USMM should be small enough to suitable for mobile devices.
4. Hidden Markov Model-Based Unit Space Map Matching
4.1. Hidden Markov Model for USMM
- the number of (hidden) states in the model N,
- the number of distinct observation symbols per states M,
- the state transition probability distribution A,
- the observation symbol probability distribution in a state B,
- and the initial state distribution .
- The
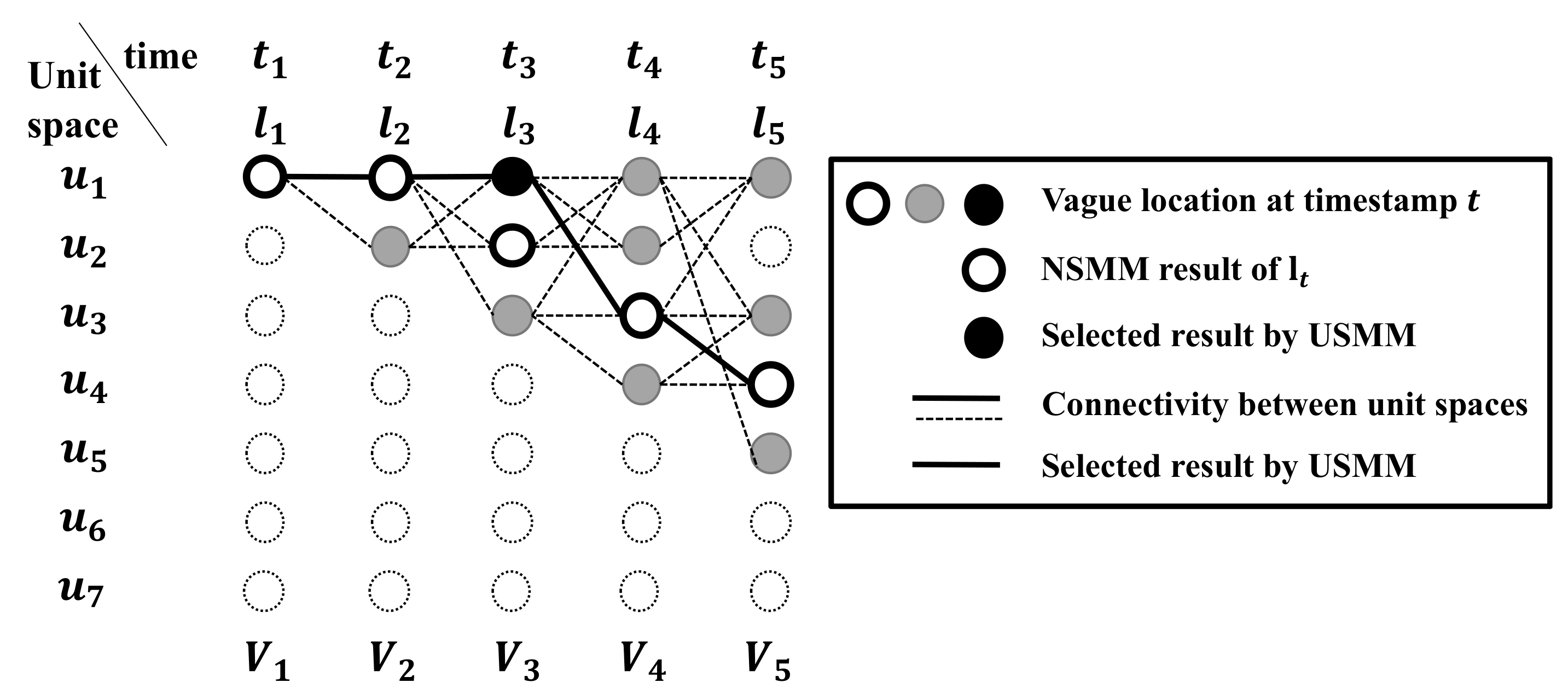
- (hidden) states: Each unit space is a hidden state of HSMM. Because hidden states denote proper unit space from a given IPS point or trajectory in USMM problem. Therefore, we denote states as , such that indicates an i-th unit space in U. Moreover, the number of states in the model is the size of U.
- The
- observation symbols per states: An observation symbol is a vague location . It means the observation symbol also represents unit space u. The individual observation symbols denote as where . Moreover, the number of observation symbols is the same as the number of states.
- The
- state transition probability distribution A: The state transition probability distribution from to is defined as below.where and are the state at timestamp and t, respectively. And the state transition probabilities have the properties as below.These probabilities are directly affected by the topographical connectivity between two unit spaces and . Therefore, we can define as a weight of edge in I.
- The
- observation symbol probability distribution B: The observation symbol probability distribution (also called emission probabilities) is a probability when a given observation symbol can be observed in a hidden state . It is defined as below.Moreover, have the properties, same as as below.has the same meaning with , which a likelihood that located on unit space at timestamp t, even if is included in . We can calculate under the assumptions as below.
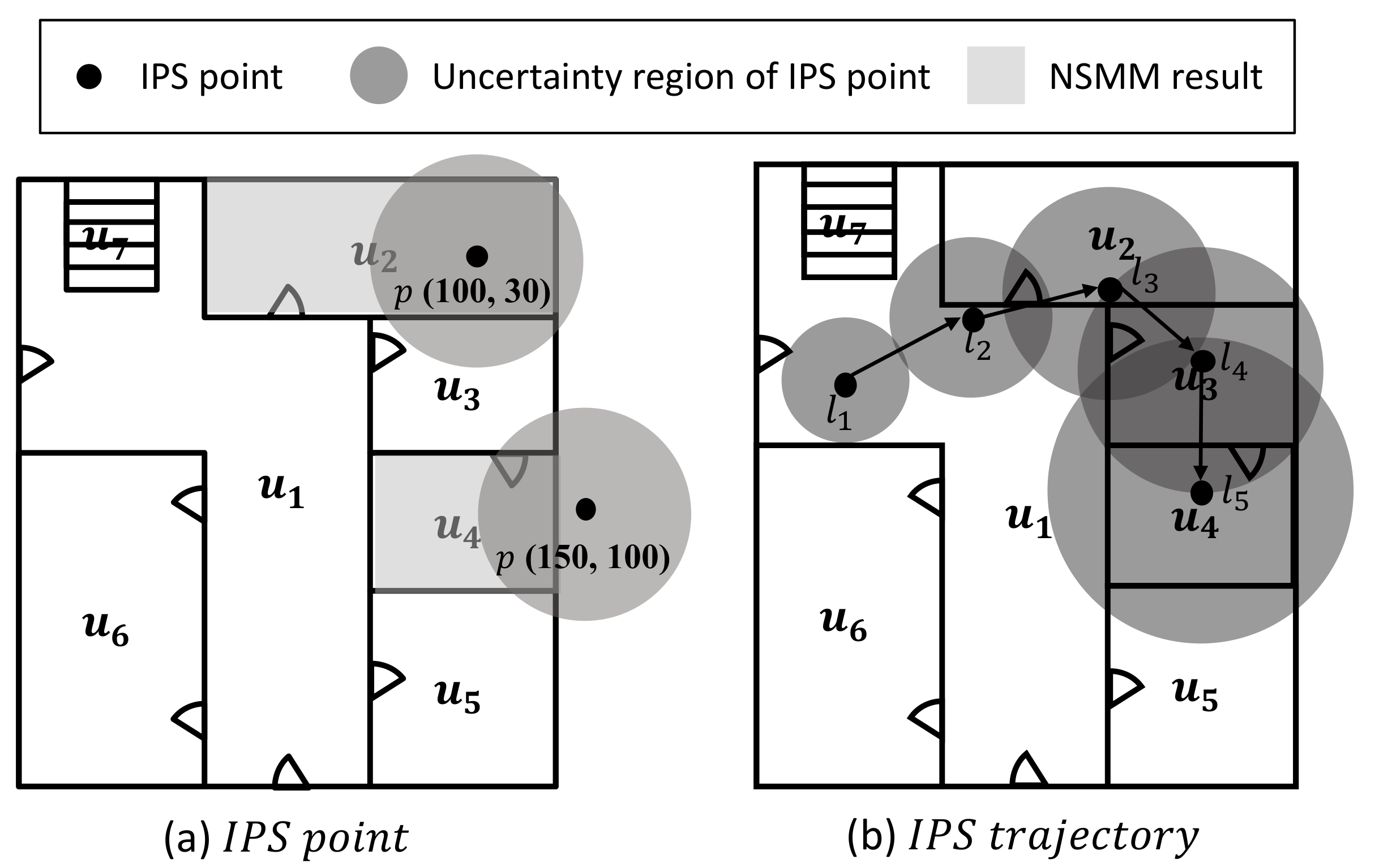
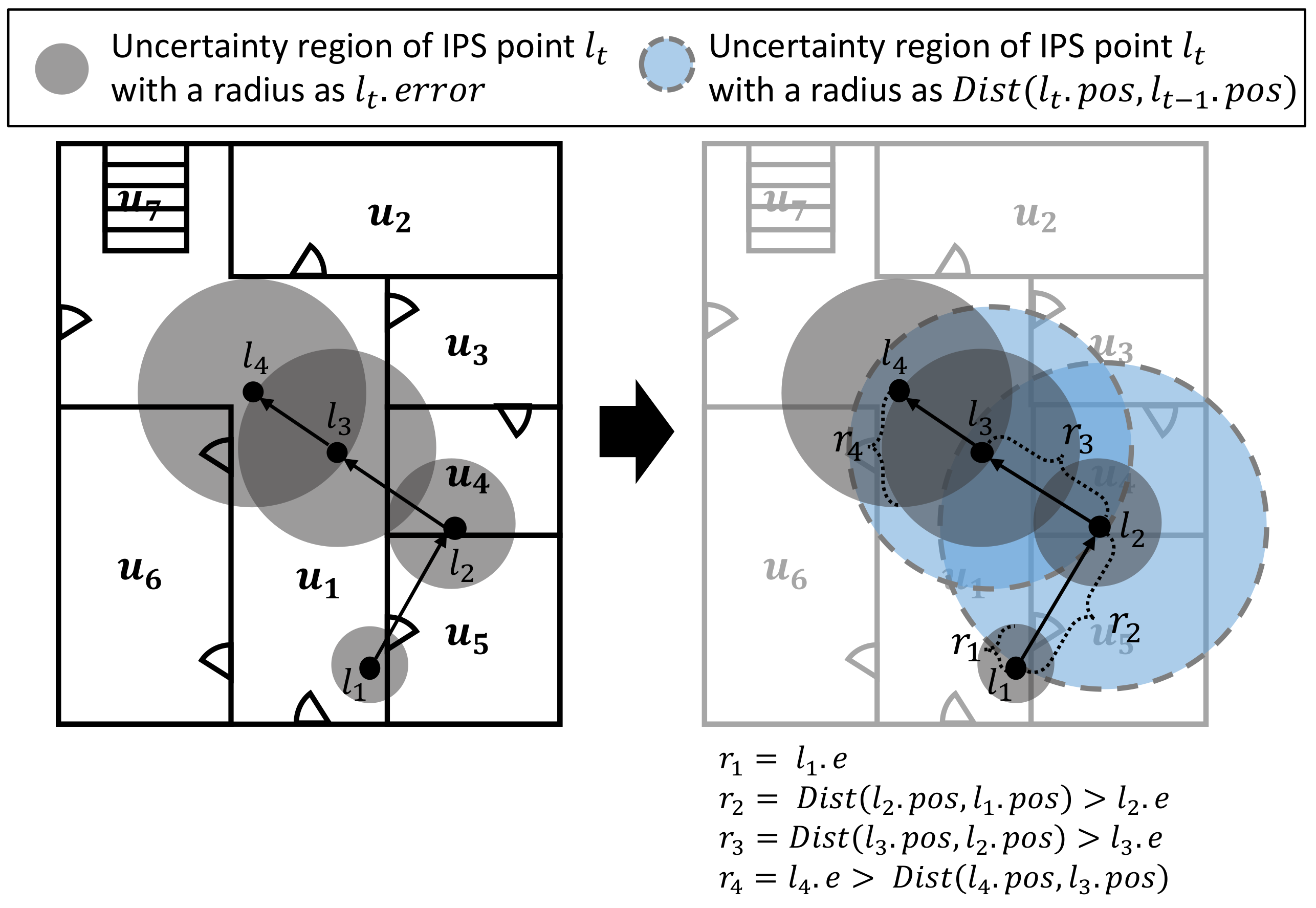
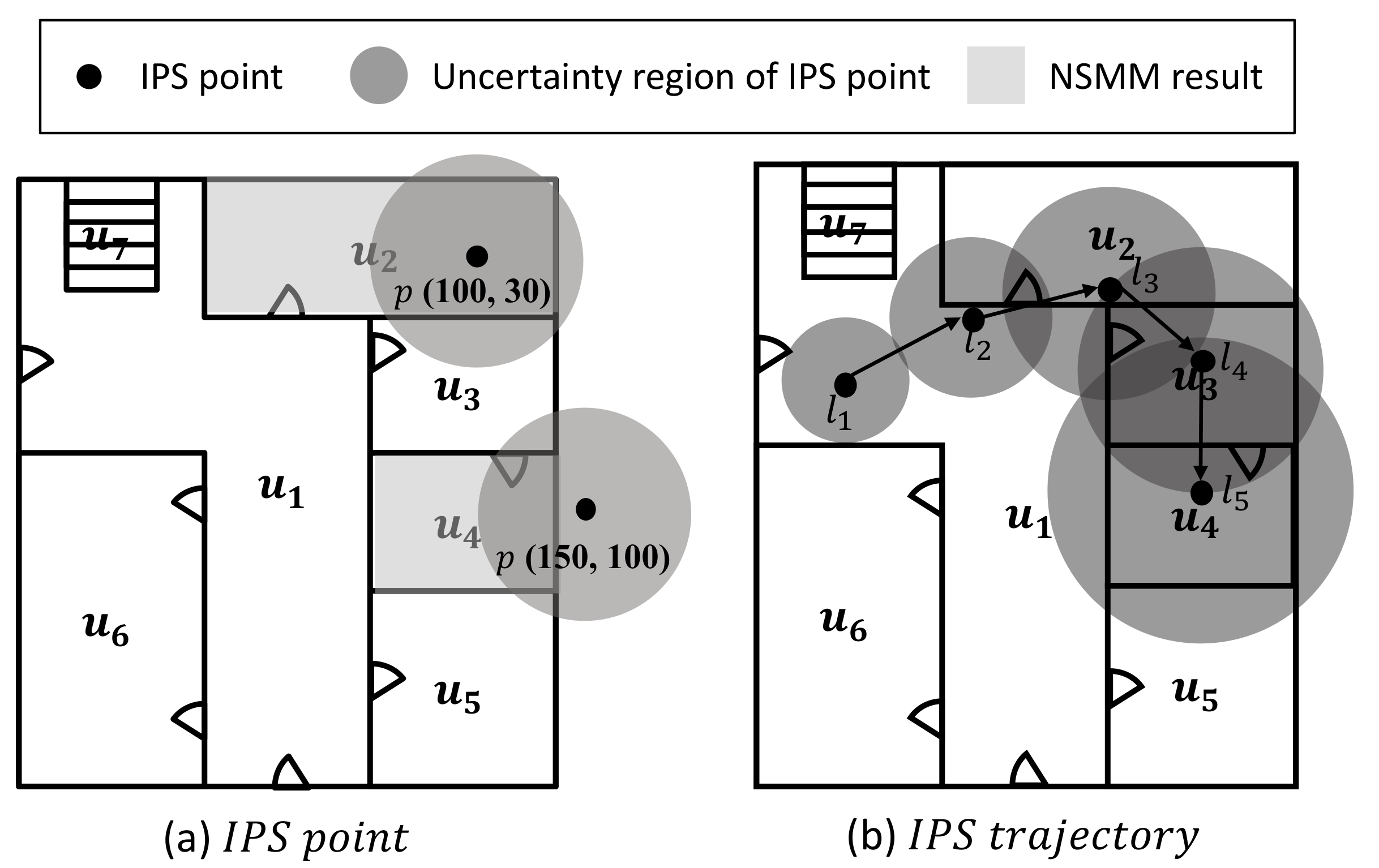
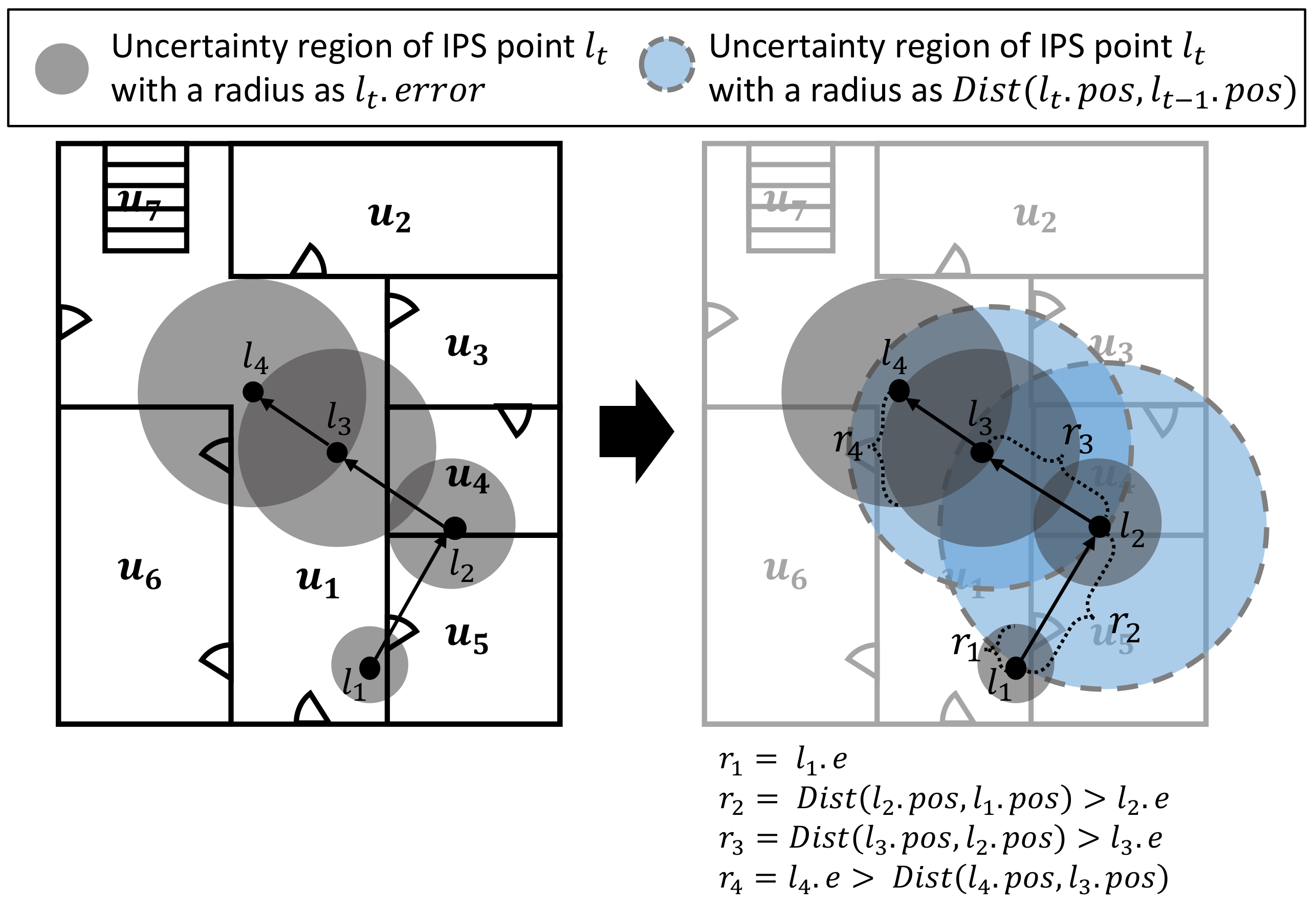
- An uncertainty region for an IPS point can be represented by an indoor positioning method error e and a point position .
- For a given , we denote a geometry of uncertainty region where can be located is .
- An emission probability can be calculated by the ratio of overlapping area between a geometry of the uncertainty region and a geometry of the unit space .
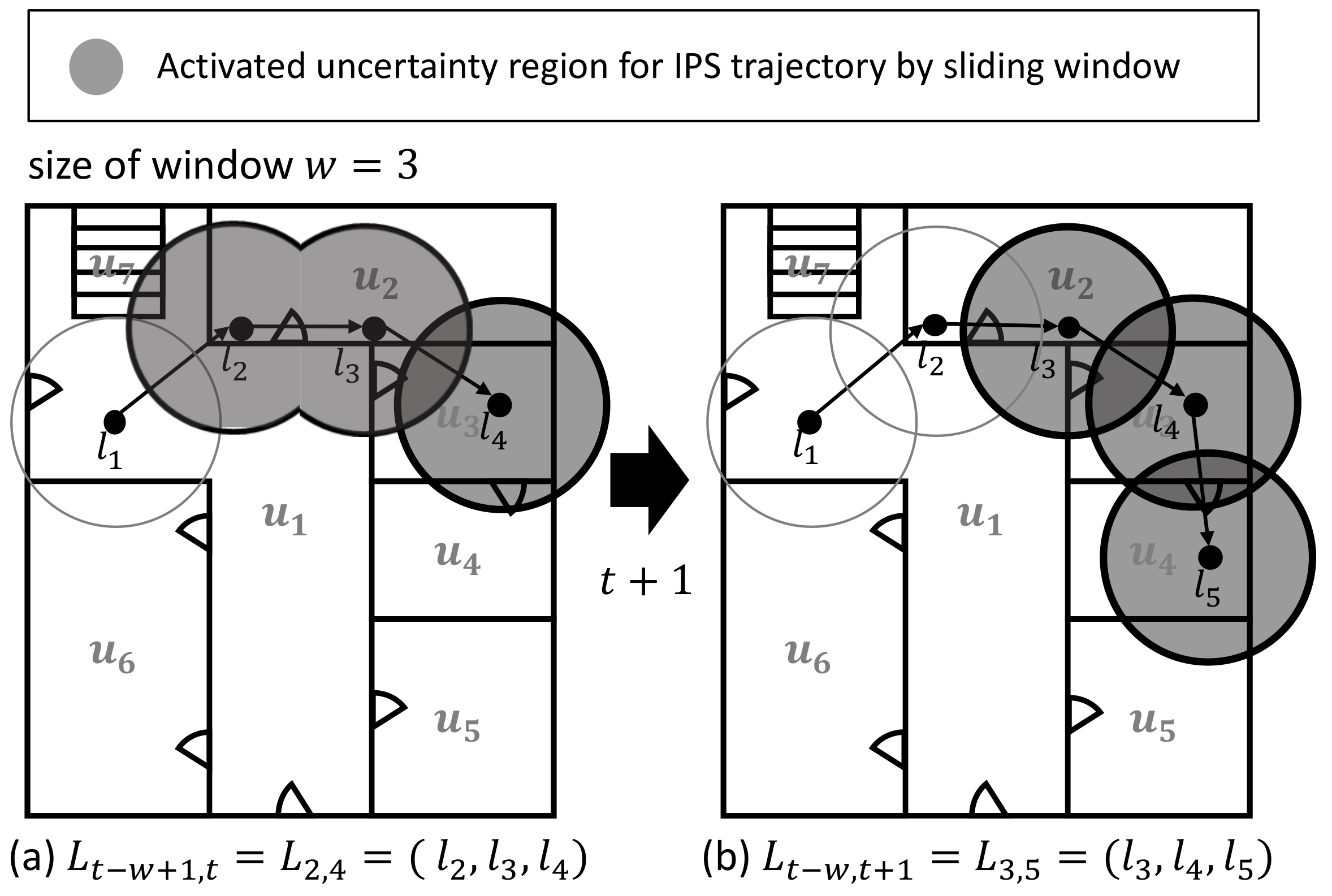
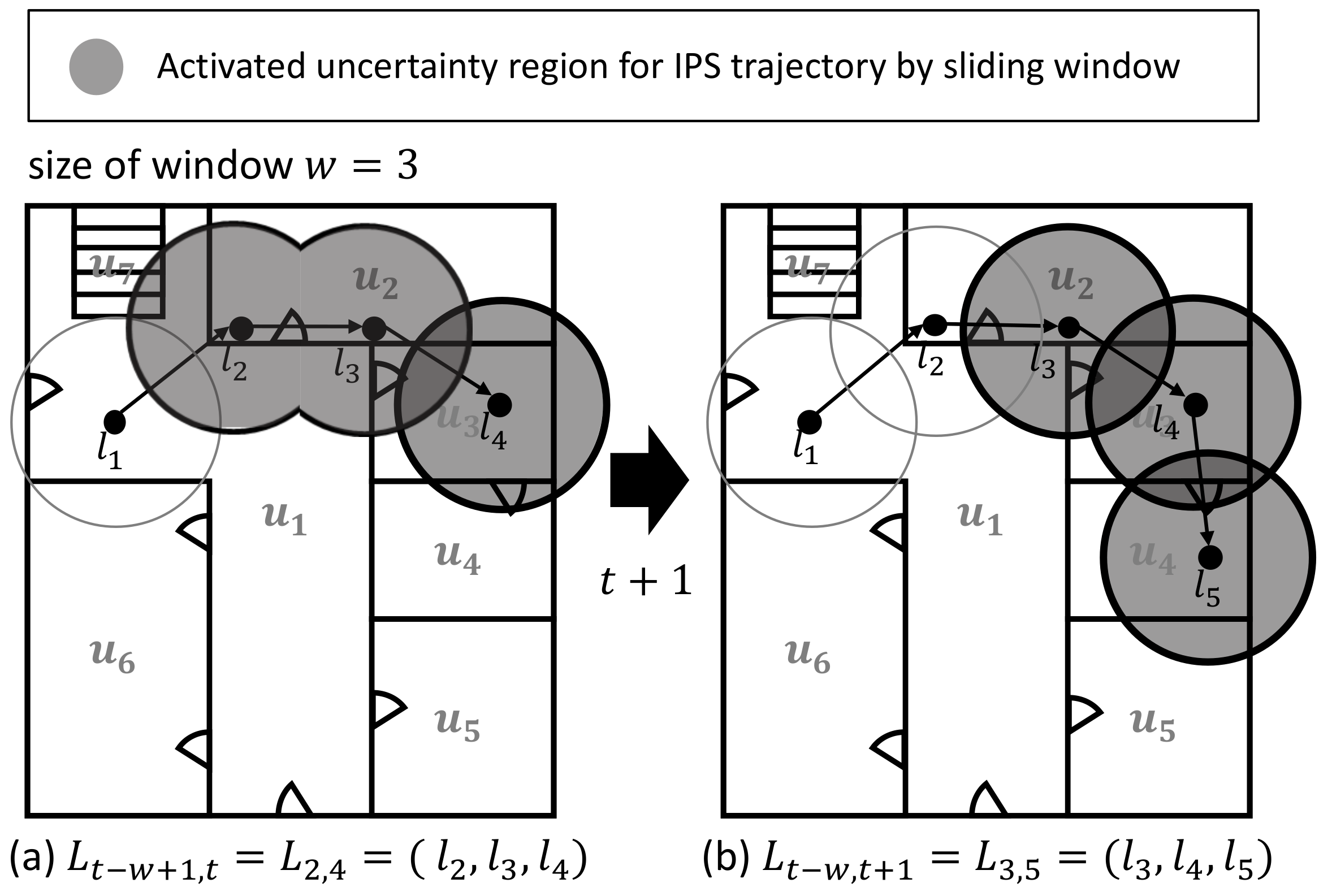
From the requirements described in Section 3.6, we have to consider the previous IPS trajectory , not only the current IPS point . We resolve it simply by grouping IPS trajectory by unit spaces in which is included, then union all geometry of uncertainty region in the same group, use it as the uncertainty region of each unit space. We denote is a union of each uncertainty region of L for .Finally, we can define as below.Note that, is an area of a polygon g. is also the same as a vague location . - The
- initial state distribution :In the case of map matching, the initial state distribution gives the probability of the moving object’s first (at timestamp ) unit space over all the spaces at the beginning of the movement.This is semantically the same as the emission probability at timestamp 1. Assuming no measurements have been taken, we start at the first IPS point and have , where and .
- the initial state distribution should be updated using the first element of and
- the observation symbol probability distribution B should be updated according to Equation (11).
| Algorithm 1 Real-Time HSMM |
Input: - I: an indoor accessibility graph as - : an IPS trajectory with last IPS point - : a last HSMM result - : a hidden Markov model for unit space map matching as a tuple - w: size of a sliding window Output: - : HSMM result (a most feasible path of ) Begin
End |
4.2. The Methods of Determining the A Matrix
4.3. The Methods of Determining the B Matrix
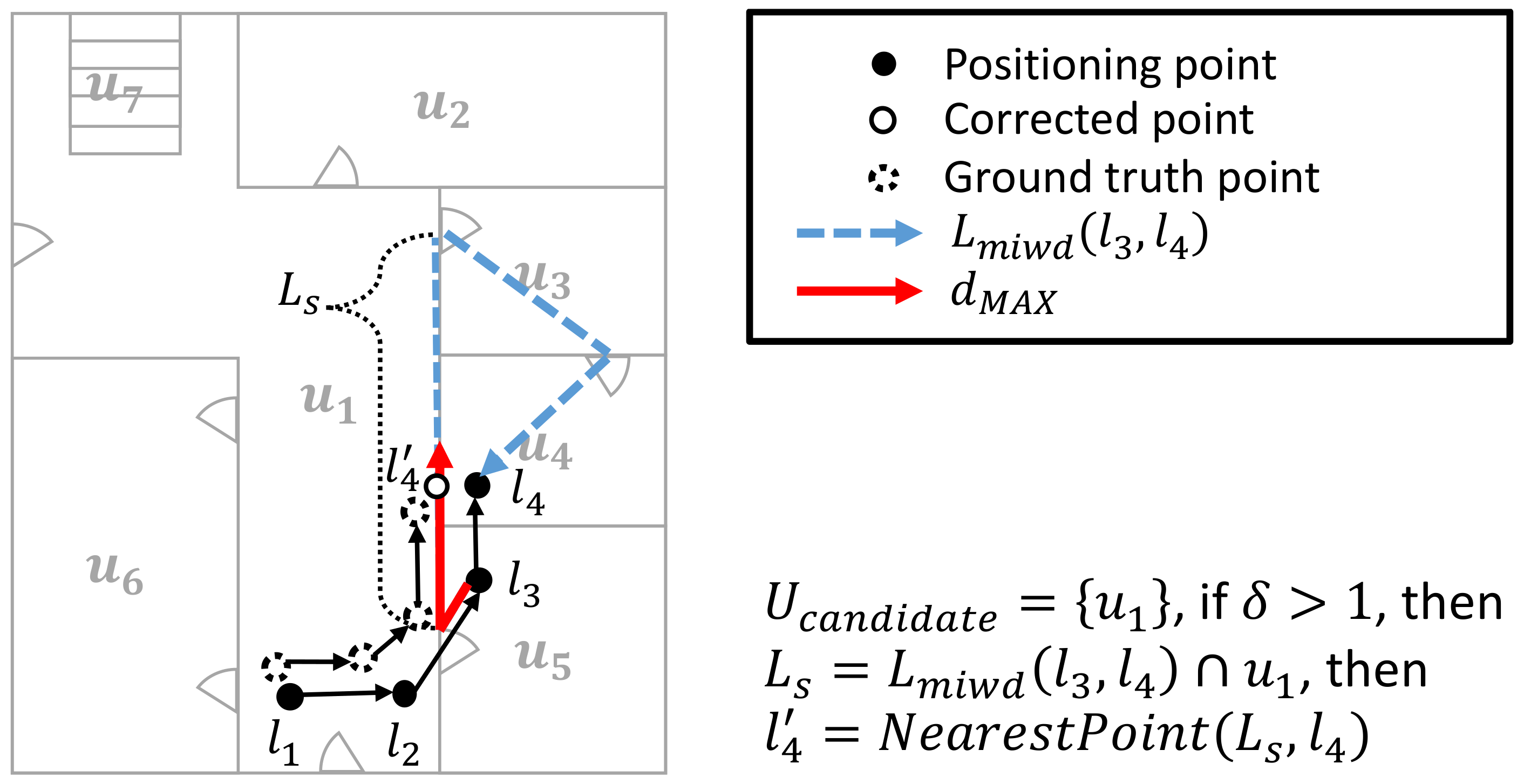
5. Indoor Distance-Based Correction
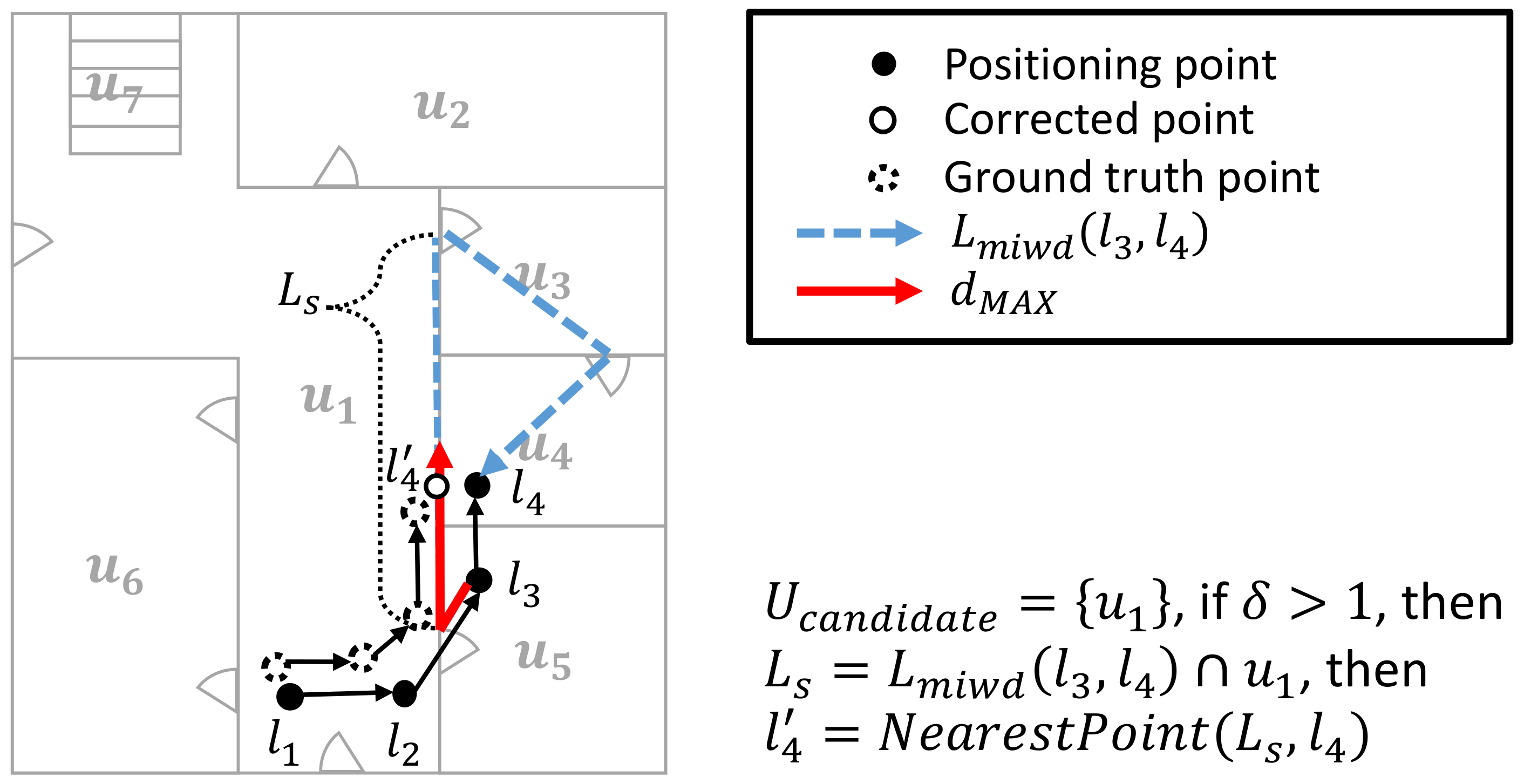
- topology condition: The candidate unit space should connect to (or ) which containing starting (or ending) IPS point (or ) respectively.
- degree condition: Furthermore, a degree of node in the graph I should be more than a given minimum threshold value . This condition is derived from a characteristic of the corridor which has several connections with rooms.
| Algorithm 2 Indoor_Distance_Correction |
Input: - : starting and ending IPS points - : maximum indoor distance value - I: indoor accessibility graph as - : threshold value for minimum degree Output: - : modified IPS point Begin
End |
6. Experiments
6.1. Experiment Environments
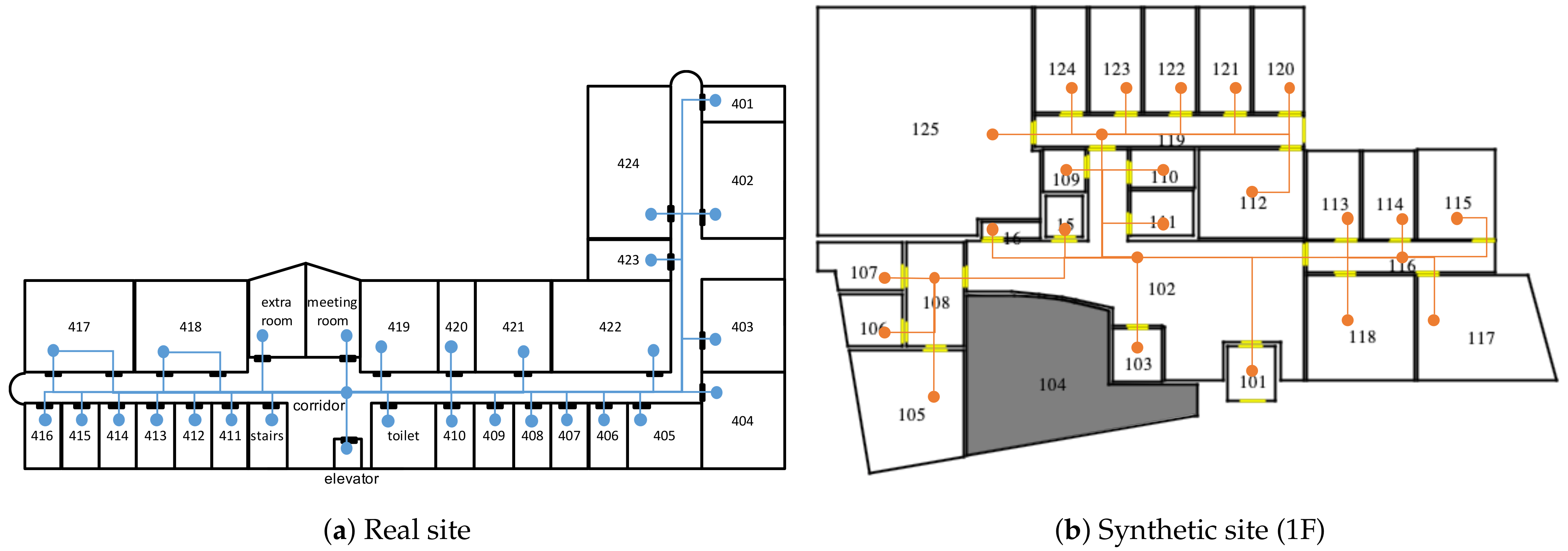
- The real trajectories of moving objects were collected by an indoor positioning application named BuildNGO [30], which is based on a hybrid approach with various sensors (Wi-Fi, BLE, GPS, accelerometer, gyroscope, and digital compass) data with PDR. This IPS has an average positioning accuracy of 1–3 m in the official. After collecting the experiment site’s fingerprint with BuildNGO, we developed an android application to collect trajectory information using their SDK. We can get discrete coordinates of a device by setting a sampling interval as one second. Furthermore, to evaluate the positioning accuracy, users need to press a button on the android application when they walk through doors to record the corresponding timestamps. Thus, we can get the ground truth location’s symbol at each walking step by interpolating based on these doors’ locations and corresponding timestamps of encountering them.
- Indoor mobility objects generator (VITA (https://github.com/longaspire/vita (accessed on 1 November 2020))) collected the synthetic trajectories of moving objects, which generates synthetic radio signal data for APs installed in the indoor space and generates positioning data for the moving object using these wireless signal data. VITA has various options to make moving object trajectories, e.g., AP device type, deployment model, number of AP devices, number of moving objects, a maximum speed of moving object, and so on. In this experiment, we generated 180 trajectories pairs (position with a trilateration positioning algorithm [77] and ground truth) with the default setting values.
6.2. Comparison of the Accuracy
- three A matrix setup methods:
- –
- AT: indoor graph connectivity-based,
- –
- : indoor graph minimum hop distance-based,
- –
- : staying probability-based. We set a parameter for is as below;initial probability , distance threshold m, and increment probability value .
- two B matrix setup methods:
- –
- : circle buffer used only,
- –
- : combine of cell geometry buffer and circle buffer.
6.3. Processing Time
7. Discussion
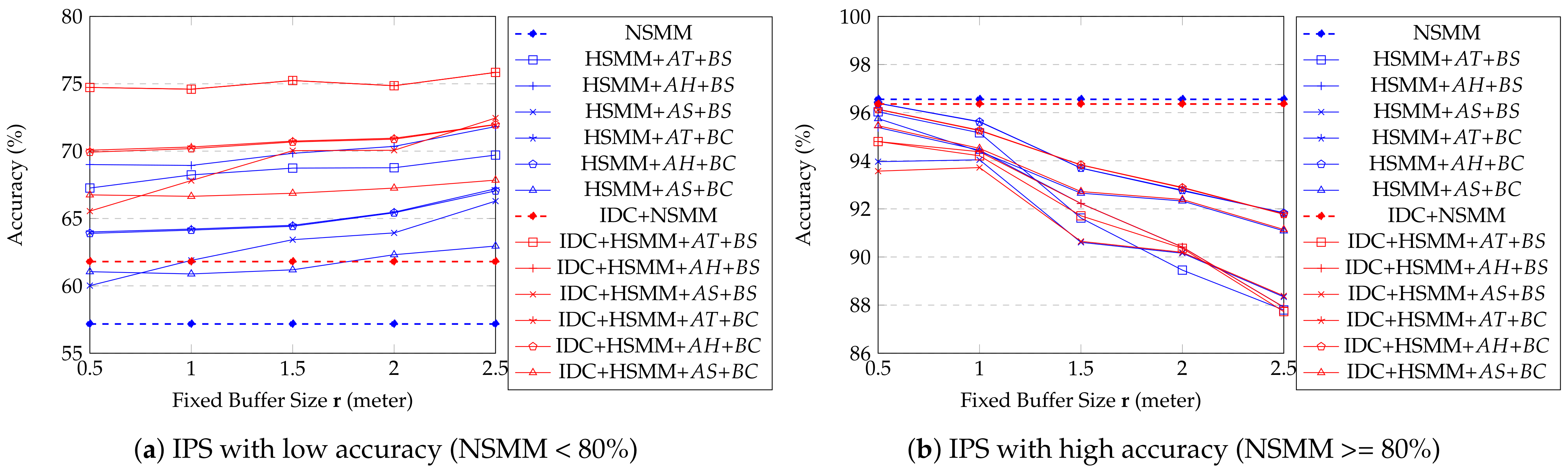
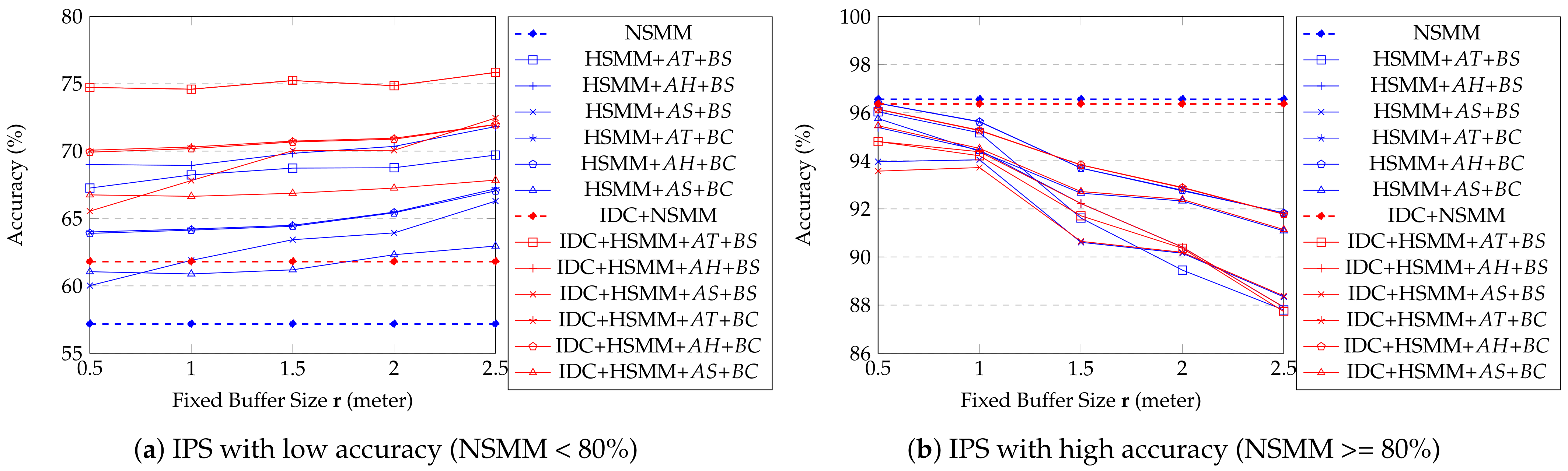
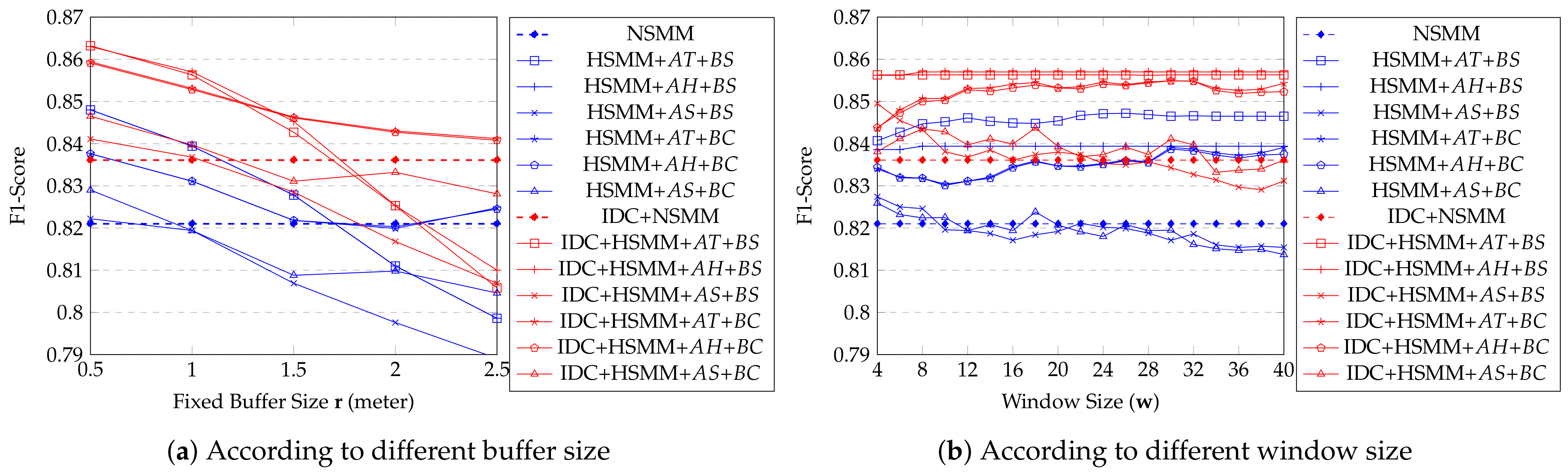
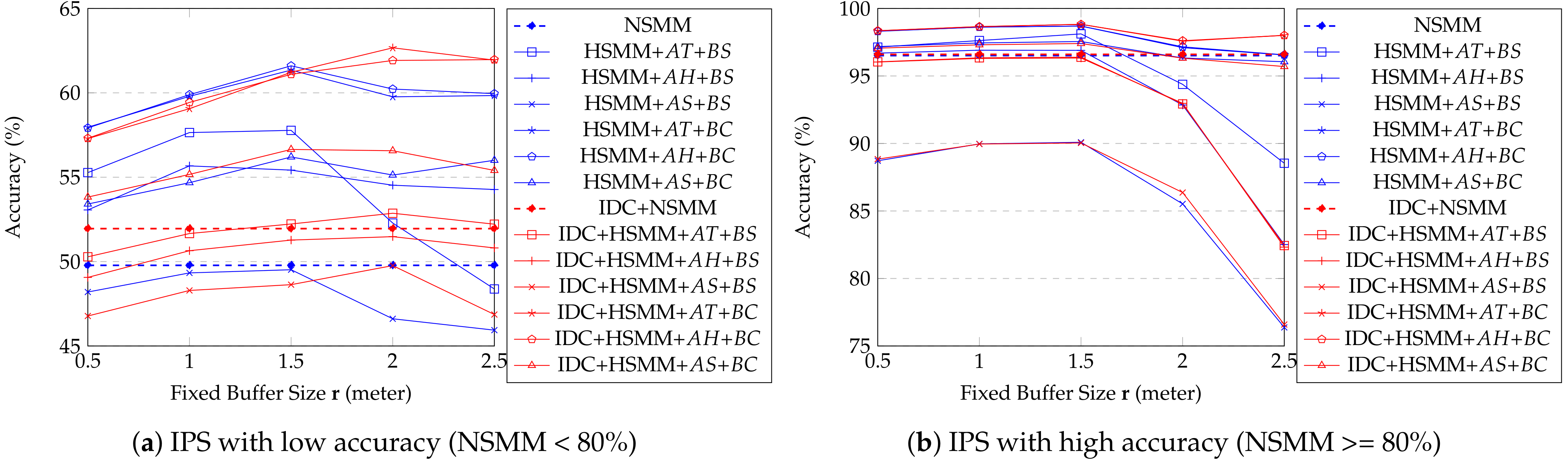
- The effect of fixed buffer size is inversely proportional to the IPS accuracy. This means the performance of HSMM is affected by the error of IPS. If we know about IPS error size at timestamp t, the HSMM accuracy can significantly improve.
- The (or ) usually achieves good USMM accuracy.
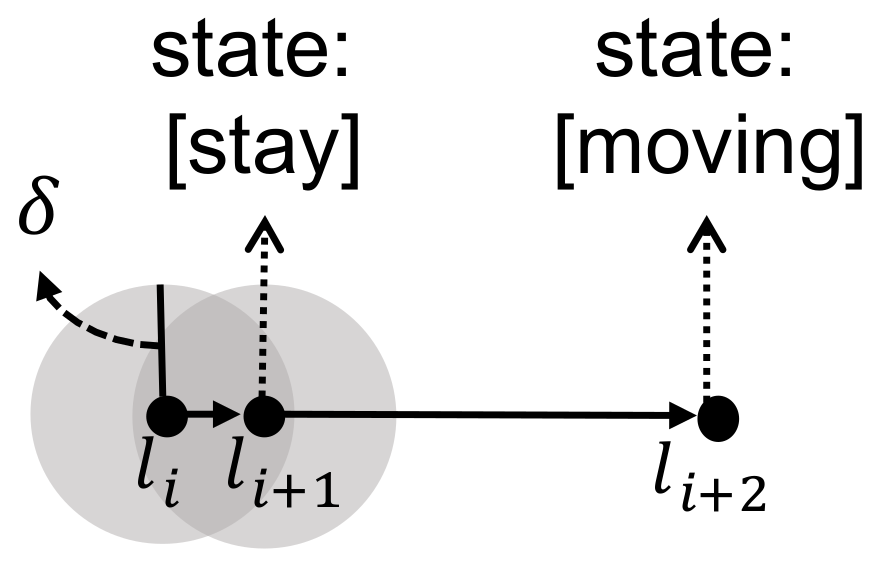
- The does not work well because almost all trajectory data represent kept moving, and its status (moving or staying) is hard to determine only coordinate information.
- The usually working well on both synthetic and real sites. However, if a unit space is connected with a large number of unit spaces, such as a long hallway in the real site case, can achieve better than .
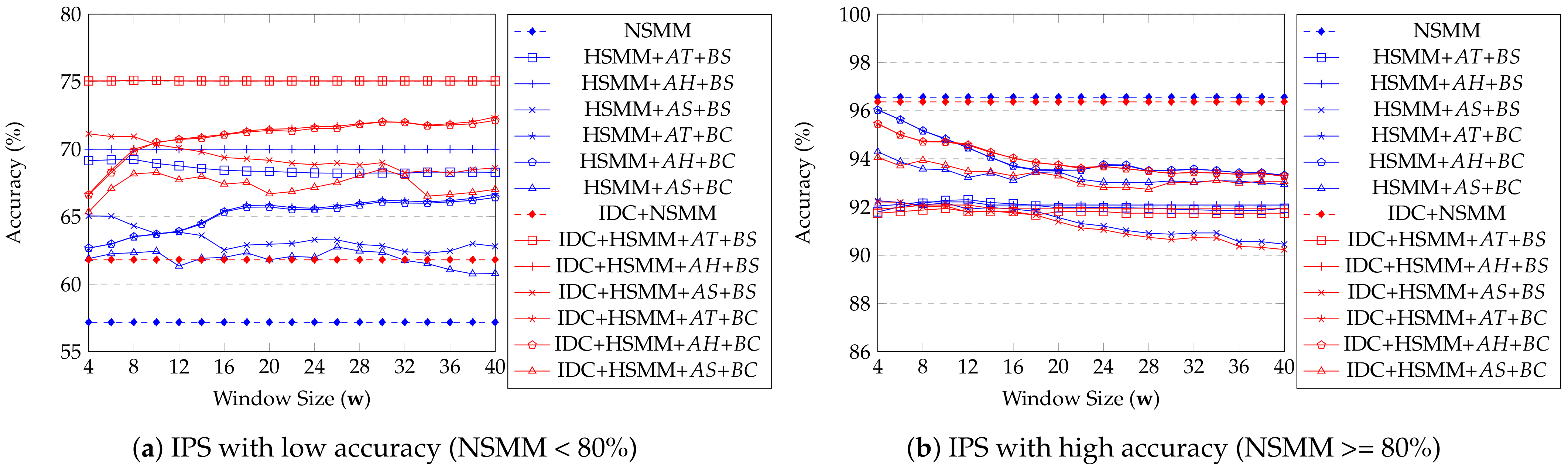
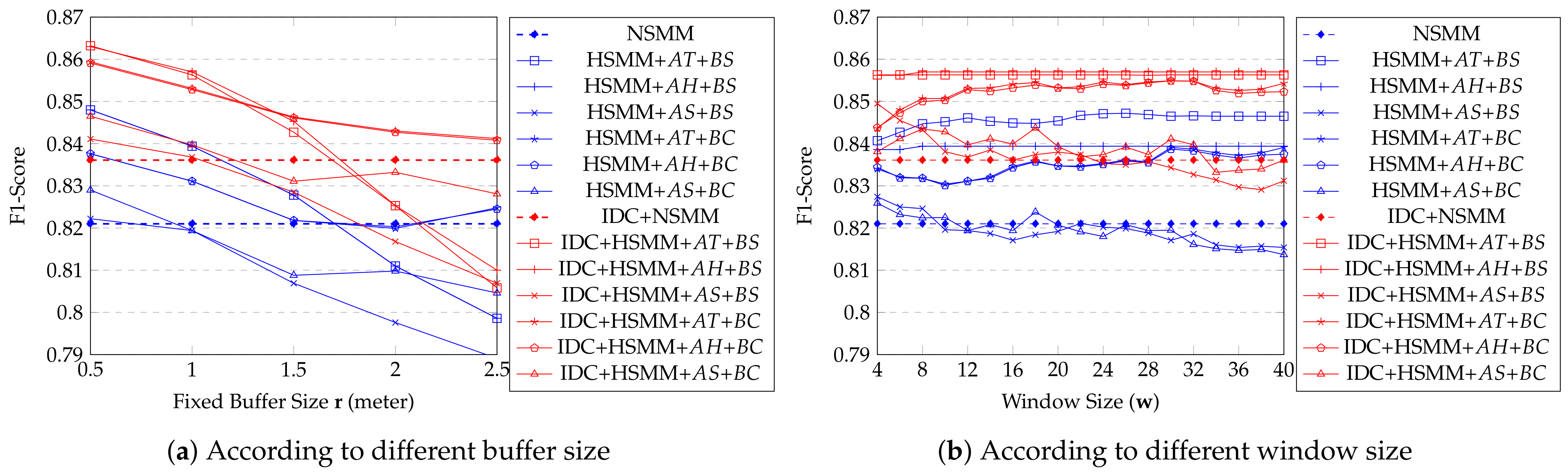
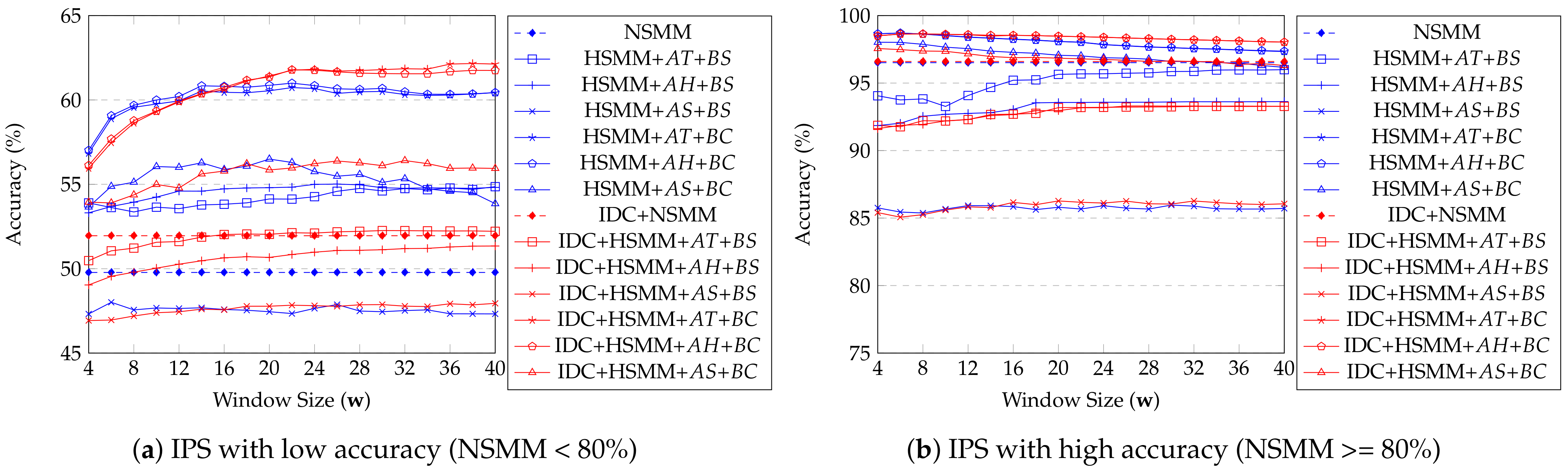
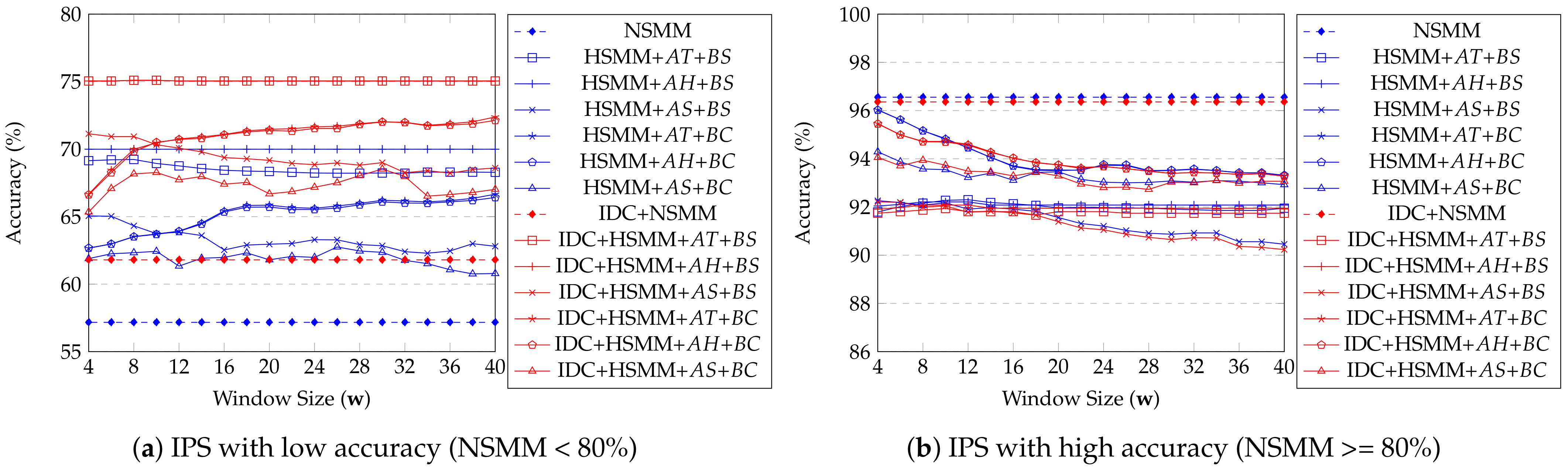
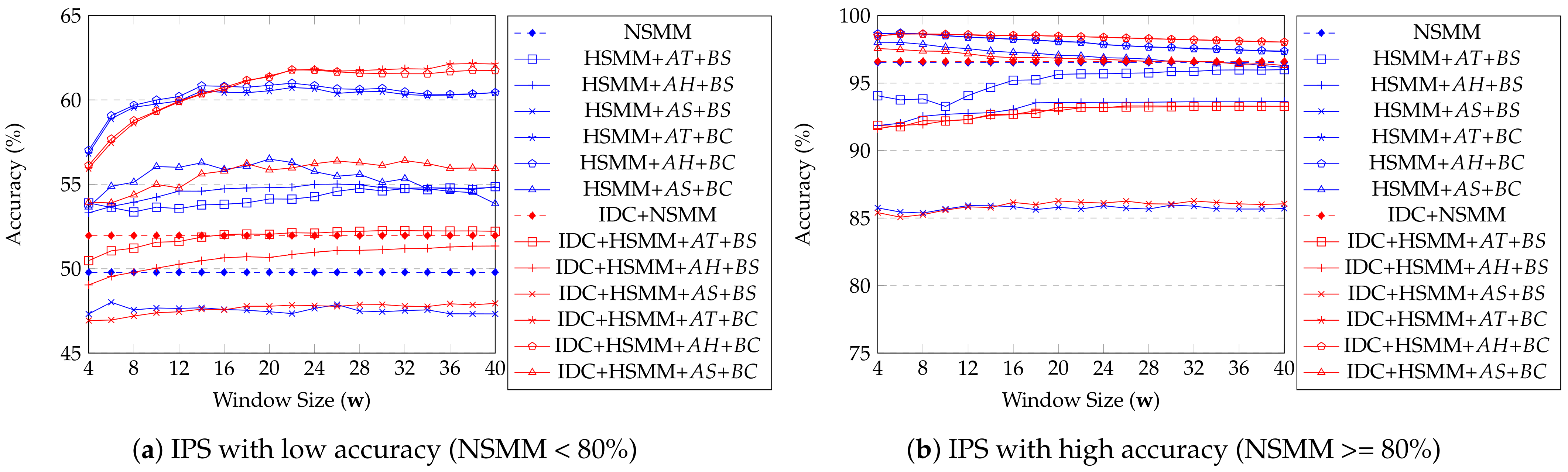
- The window size and USMM accuracy are proportional. However, if the is large enough, it has little effect on accuracy.
- The IDC trajectory works well on the simple site with a long hallway. The IDC algorithm is structurally working well with a huge unit space that the huge unit space is connected to multiple unit spaces, especially when it is actually in the huge unit space but is positioned in the adjacent unit space. We can expect it is useful such as hotel, school, university, hospital, etc.
8. Conclusions and Future Work
- Formulated the unit space map matching (USMM) problem, which translates IPS trajectory to proper unit space identifier.
- Developed several USMM methods based on the hidden Markov model, named HSMM, with three A matrix setup methods and two B matrix setup methods.
- Developed minimum indoor walking distance-based correction method as preprocess step.
- Analyze the accuracy of the HSMM methods by extensive experiments with a synthetic and real dataset. The results of experiments show that the HSMM methods show significant improvements in accuracy, mainly when the accuracy of indoor positioning (NSMM) is low.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Curran, K.; Furey, E.; Lunney, T.; Santos, J.; Woods, D.; McCaughey, A. An evaluation of indoor location determination technologies. J. Locat. Based Serv. 2011, 5, 61–78. [Google Scholar] [CrossRef]
- Xiao, J.; Zhou, Z.; Yi, Y.; Ni, L. A survey on wireless indoor localization from the device perspective. ACM Comput. Surv. (CSUR) 2016, 49, 25. [Google Scholar] [CrossRef]
- Gu, F.; Hu, X.; Ramezani, M.; Acharya, D.; Khoshelham, K.; Valaee, S.; Shang, J. Indoor localization improved by spatial context—A survey. ACM Comput. Surv. (CSUR) 2019, 52, 1–35. [Google Scholar] [CrossRef] [Green Version]
- Alavi, B.; Pahlavan, K. Modeling of the TOA-based distance measurement error using UWB indoor radio measurements. Commun. Lett. IEEE 2006, 10, 275–277. [Google Scholar] [CrossRef]
- Lymberopoulos, D.; Liu, J. The microsoft indoor localization competition: Experiences and lessons learned. IEEE Signal Process. Mag. 2017, 34, 125–140. [Google Scholar] [CrossRef]
- Bahl, P.; Padmanabhan, V.N. RADAR: An in-building RF-based user location and tracking system. In Proceedings of the INFOCOM 2000, Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies, Tel Aviv, Israel, 26–30 March 2000; Volume 2, pp. 775–784. [Google Scholar]
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of wireless indoor positioning techniques and systems. Syst. Man Cybern. Part C Appl. Rev. IEEE Trans. 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Stojanović, D.; Stojanović, N. Indoor localization and tracking: Methods, technologies and research challenges. Facta Univ. Ser. Autom. Control Robot. 2014, 13, 57–72. [Google Scholar]
- He, S.; Chan, S.H.G. Wi-Fi fingerprint-based indoor positioning: Recent advances and comparisons. IEEE Commun. Surv. Tutorials 2015, 18, 466–490. [Google Scholar] [CrossRef]
- Duque Domingo, J.; Cerrada, C.; Valero, E.; Cerrada, J.A. An improved indoor positioning system using RGB-D cameras and wireless networks for use in complex environments. Sensors 2017, 17, 2391. [Google Scholar] [CrossRef] [Green Version]
- Liu, F.; Liu, J.; Yin, Y.; Wang, W.; Hu, D.; Chen, P.; Niu, Q. Survey on WiFi-based indoor positioning techniques. IET Commun. 2020, 14, 1372–1383. [Google Scholar] [CrossRef]
- Koike-Akino, T.; Wang, P.; Pajovic, M.; Sun, H.; Orlik, P.V. Fingerprinting-based indoor localization with commercial MMWave WiFi: A deep learning approach. IEEE Access 2020, 8, 84879–84892. [Google Scholar] [CrossRef]
- Schroeer, G. A real-time UWB multi-channel indoor positioning system for industrial scenarios. In Proceedings of the 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nantes, France, 24–27 September 2018; pp. 1–5. [Google Scholar]
- Shirehjini, A.A.N.; Semsar, A. Human interaction with IoT-based smart environments. Multimed. Tools Appl. 2017, 76, 13343–13365. [Google Scholar] [CrossRef]
- Sheth, A.; Seshan, S.; Wetherall, D. Geo-fencing: Confining Wi-Fi coverage to physical boundaries. In Proceedings of the International Conference on Pervasive Computing, Galveston, TX, USA, 9–13 March 2009; Springer: Berlin/Heidelberg, Germany, 2009; pp. 274–290. [Google Scholar]
- Rahimi, H.; Zincir-Heywood, A.N.; Gadher, B. Indoor geo-fencing and access control for wireless networks. In Proceedings of the 2013 IEEE Symposium on Computational Intelligence in Cyber Security (CICS), Singapore, 16 – 19 April 2013; pp. 1–8. [Google Scholar]
- Jensen, C.; Lu, H.; Yang, B. Indexing the trajectories of moving objects in symbolic indoor space. In Advances in Spatial and Temporal Databases; Springer: Berlin/Heidelberg, Germany, 2009; pp. 208–227. [Google Scholar]
- Lu, H.; Yang, B.; Jensen, C.S. Spatio-temporal joins on symbolic indoor tracking data. In Proceedings of the 2011 IEEE 27th International Conference on Data Engineering, Washington, DC USA, 11–16 April 2011; pp. 816–827. [Google Scholar]
- Ahmed, T.; Pedersen, T.B.; Lu, H. Finding dense locations in symbolic indoor tracking data: Modeling, indexing, and processing. GeoInformatica 2017, 21, 119–150. [Google Scholar] [CrossRef]
- Li, K. Indoor space: A new notion of space. In Web and Wireless Geographical Information Systems; Springer: Berlin/Heidelberg, Germany, 2008; pp. 1–3. [Google Scholar]
- Jiang, Y.; Pan, X.; Li, K.; Lv, Q.; Dick, R.P.; Hannigan, M.; Shang, L. Ariel: Automatic wi-fi based room fingerprinting for indoor localization. In Proceedings of the 2012 ACM Conference on Ubiquitous Computing, Pittsburgh, PA, USA, 5–8 September 2012; pp. 441–450. [Google Scholar]
- Jiang, Y.; Xiang, Y.; Pan, X.; Li, K.; Lv, Q.; Dick, R.P.; Shang, L.; Hannigan, M. Hallway based automatic indoor floorplan construction using room fingerprints. In Proceedings of the 2013 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Zurich, Switzerland, 8–12 September 2013; pp. 315–324. [Google Scholar]
- Li, Y.; Williams, S.; Moran, B.; Kealy, A. Quantized rss based wi-fi indoor localization with room level accuracy. In Proceedings of the IGNSS Conference, Sydney, Australia, 7–9 February 2018; pp. 1–14. [Google Scholar]
- Li, K.; Lee, J. Indoor spatial awareness initiative and standard for indoor spatial data. In Proceedings of the IROS 2010 Workshop on Standardization for Service Robot, Taipei, Taiwan, 18 October 2010; Volume 18. [Google Scholar]
- Kang, H.; Kim, J.; Li, K. strack: Tracking in indoor symbolic space with RFID sensors. In Proceedings of the 18th SIGSPATIAL International Conference on Advances in Geographic Information Systems, San Jose, CA, USA, 2–5 November 2010; ACM: New York, NY, USA, 2010; pp. 502–505. [Google Scholar]
- Afyouni, I.; Ray, C.; Christophe, C. Spatial models for context-aware indoor navigation systems: A survey. J. Spat. Inf. Sci. 2012, 1, 85–123. [Google Scholar] [CrossRef] [Green Version]
- IndoorAtlas. Last Meter Accuracy Through Technology Fusion. Available online: https://www.indooratlas.com/positioning-technology/ (accessed on 1 February 2021).
- ArcGIS Indoors. ArcGIS Indoors. Available online: https://www.esri.com/en-us/arcgis/products/arcgis-indoors/ (accessed on 1 February 2021).
- Anyplace. Indoor Information Service, Anyplace. Available online: https://anyplace.cs.ucy.ac.cy/ (accessed on 1 February 2021).
- SAILS Technology. Indoor Navi: SAILS Technology. Available online: https://www.sailstech.com/ (accessed on 1 February 2021).
- Dürr, F.; Rothermel, K. On a location model for fine-grained geocast. In Proceedings of the International Conference on Ubiquitous Computing, Seattle, WA, USA, 12–15 October 2003; Springer: Berlin/Heidelberg, Germany, 2003; pp. 18–35. [Google Scholar]
- Hu, H.; Lee, D.L. Semantic location modeling for location navigation in mobile environment. In Proceedings of the IEEE International Conference on Mobile Data Management, 2004. Proceedings, Berkeley, CA, USA, 19–22 January 2004; pp. 52–61. [Google Scholar]
- Stoffel, E.P.; Schoder, K.; Ohlbach, H.J. Applying hierarchical graphs to pedestrian indoor navigation. In Proceedings of the 16th ACM SIGSPATIAL International Conference On Advances in Geographic Information Systems, Irvine, CA, USA, 5–7 November 2008; pp. 1–4. [Google Scholar]
- Becker, T.; Nagel, C.; Kolbe, T.H. Discussion of Euclidean Space and Cellular Space and Proposal of An Integrated Indoor Spatial Data Model; Technical Report; Institute of Geodesy and Geoinformation Science: Berlin, Germany, 2010. [Google Scholar]
- Franz, G.; Mallot, H.A.; Wiener, J.M. Graph-based models of space in architecture and cognitive science: A comparative analysis. In Proceedings of the 17th International Conference on Systems Research, Informatics and Cybernetics (INTERSYMP 2005), International Institute for Advanced Studies in Systems Research and Cybernetics, Baden-Baden, Germany, 1–7 August 2005; pp. 30–38. [Google Scholar]
- Jensen, C.; Lu, H.; Yang, B. Graph model based indoor tracking. In Proceedings of the Mobile Data Management: Systems, Services and Middleware, 2009; Tenth International Conference on IEEE, Taipei, Taiwan, 18–21 May 2009; pp. 122–131. [Google Scholar]
- Shang, J.; Hu, X.; Cheng, W.; Fan, H. GridiLoc: A backtracking grid filter for fusing the grid model with PDR using smartphone sensors. Sensors 2016, 16, 2137. [Google Scholar] [CrossRef] [Green Version]
- Li, D.; Lee, D.L. A Topology-Based Semantic Location Model for Indoor Applications. In Proceedings of the 16th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Irvine, CA, USA, 5–7 November 2008; Association for Computing Machinery: New York, NY, USA, 2008. [Google Scholar] [CrossRef]
- Hilsenbeck, S.; Bobkov, D.; Schroth, G.; Huitl, R.; Steinbach, E. Graph-Based Data Fusion of Pedometer and WiFi Measurements for Mobile Indoor Positioning. In Proceedings of the 2014 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Seattle, DC, USA, 13–17 September 2014; Association for Computing Machinery: New York, NY, USA, 2014; pp. 147–158. [Google Scholar] [CrossRef]
- Lee, J.; Li, K.J.; Zlatanova, S.; Kolbe, T.H.; Nagel, C.; Becker, T.; Kang, H.Y. OGC® IndoorGML 1.1. Standard, Open Geospatial Consortium. 2020. Available online: https://docs.ogc.org/is/19-011r4/19-011r4.html (accessed on 1 December 2020).
- Wu, C.; Yang, Z.; Liu, Y.; Xi, W. WILL: Wireless indoor localization without site survey. Parallel Distrib. Syst. 2013, 24, 839–848. [Google Scholar]
- Xiao, Z.; Wen, H.; Markham, A.; Trigoni, N. Lightweight map matching for indoor localisation using conditional random fields. In Proceedings of the Information Processing in Sensor Networks, IPSN-14 Proceedings of the 13th International Symposium on IEEE, Berlin, Germany, 15–17 April 2014; pp. 131–142. [Google Scholar]
- Kang, W.; Han, Y. SmartPDR: Smartphone-based pedestrian dead reckoning for indoor localization. IEEE Sensors J. 2015, 15, 2906–2916. [Google Scholar] [CrossRef]
- Song, C.; Wang, J.; Yuan, G. Hidden naive bayes indoor fingerprinting localization based on best-discriminating AP selection. ISPRS Int. J. Geo-Inf. 2016, 5, 189. [Google Scholar] [CrossRef]
- Al-Madani, B.; Orujov, F.; Maskeliūnas, R.; Damaševičius, R.; Venčkauskas, A. Fuzzy logic type-2 based wireless indoor localization system for navigation of visually impaired people in buildings. Sensors 2019, 19, 2114. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Son, W.; Choi, L. Magnetic Vector Calibration for Real-Time Indoor Positioning. In Proceedings of the ICC 2020-2020 IEEE International Conference on Communications (ICC), Online, 7–11 June 2020; pp. 1–7. [Google Scholar]
- Shang, J.; Gu, F.; Hu, X.; Kealy, A. Apfiloc: An infrastructure-free indoor localization method fusing smartphone inertial sensors, landmarks and map information. Sensors 2015, 15, 27251–27272. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Guo, S.; Xiong, H.; Zheng, X. A Novel Semantic Matching Method for Indoor Trajectory Tracking. ISPRS Int. J. Geo-Inf. 2017, 6, 197. [Google Scholar] [CrossRef]
- Radaelli, L.; Moses, Y.; Jensen, C. Using cameras to improve wi-fi based indoor positioning. In Proceedings of the International Symposium on Web and Wireless Geographical Information Systems, Seoul, Korea, 29–30 May 2014; Springer: Berlin/Heidelberg, Germany, 2014; pp. 166–183. [Google Scholar]
- Xu, H.; Yang, Z.; Zhou, Z.; Shangguan, L.; Yi, K.; Liu, Y. Indoor localization via multi-modal sensing on smartphones. In Proceedings of the 2016 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Heidelberg, Germany, 12–16 September 2016; ACM: New York, NY, USA, 2016; pp. 208–219. [Google Scholar]
- Uygur, I.; Miyagusuku, R.; Pathak, S.; Moro, A.; Yamashita, A.; Asama, H. Robust and efficient indoor localization using sparse semantic information from a spherical camera. Sensors 2020, 20, 4128. [Google Scholar] [CrossRef] [PubMed]
- Naya, F.; Noma, H.; Ohmura, R.; Kogure, K. Bluetooth-based indoor proximity sensing for nursing context awareness. In Proceedings of the Ninth IEEE International Symposium on Wearable Computers (ISWC’05), Osaka, Japan, 18–21 October 2005; pp. 212–213. [Google Scholar]
- Chon, J.; Cha, H. Lifemap: A smartphone-based context provider for location-based services. IEEE Pervasive Comput. 2011, 10, 58–67. [Google Scholar] [CrossRef]
- Chen, Y.; Lymberopoulos, D.; Liu, J.; Priyantha, B. FM-based indoor localization. In Proceedings of the 10th International Conference on Mobile Systems, Applications, and Services, Low Wood Bay, Lake District, UK, 26–28 June 2012; pp. 169–182. [Google Scholar]
- Biehl, J.T.; Cooper, M.; Filby, G.; Kratz, S. Loco: A ready-to-deploy framework for efficient room localization using wi-fi. In Proceedings of the 2014 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Seattle, WA, USA, 13–17 September 2014; pp. 183–187. [Google Scholar]
- Kyritsis, A.I.; Kostopoulos, P.; Deriaz, M.; Konstantas, D. A BLE-based probabilistic room-level localization method. In Proceedings of the 2016 International Conference on Localization and GNSS (ICL-GNSS), Barcelona, Spain, 28–30 June 2016; pp. 1–6. [Google Scholar]
- Jaén, L.; Álvarez, F.; Aguilera, T.; García, J. Room-level indoor positioning based on acoustic impulse response identification. In Proceedings of the Indoor Positioning and Indoor Navigation (IPIN), 2017 International Conference on IEEE, Sapporo, Japan, 18–21 September 2017; pp. 1–4. [Google Scholar]
- Akram, B.A.; Akbar, A.H.; Shafiq, O. HybLoc: Hybrid indoor Wi-Fi localization using soft clustering-based random decision forest ensembles. IEEE Access 2018, 6, 38251–38272. [Google Scholar] [CrossRef]
- Hastie, T.; Rosset, S.; Zhu, J.; Zou, H. Multi-class adaboost. Stat. Its Interface 2009, 2, 349–360. [Google Scholar] [CrossRef] [Green Version]
- Jensen, C.S.; Tradišauskas, N. Map Matching. In Encyclopedia of Database Systems; Springer: Boston, MA, USA, 2009; pp. 1692–1696. [Google Scholar] [CrossRef]
- Newson, P.; Krumm, J. Hidden Markov map matching through noise and sparseness. In Proceedings of the 17th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Seattle, WA, USA, 4–6 November 2009; ACM: New York, NY, USA, 2009; pp. 336–343. [Google Scholar]
- Goh, C.; Dauwels, J.; Mitrovic, N.; Asif, M.; Oran, A.; Jaillet, P. Online map-matching based on hidden markov model for real-time traffic sensing applications. In Proceedings of the Intelligent Transportation Systems (ITSC), 2012 15th International IEEE Conference on IEEE, Anchorage, AK, USA, 16–19 September 2012; pp. 776–781. [Google Scholar]
- Luo, A.; Chen, S.; Xv, B. Enhanced map-matching algorithm with a hidden Markov model for mobile phone positioning. ISPRS Int. J. Geo-Inf. 2017, 6, 327. [Google Scholar] [CrossRef] [Green Version]
- Egenhofer, M.J.; Franzosa, R.D. Point-set topological spatial relations. Int. J. Geogr. Inf. Syst. 1991, 5, 161–174. [Google Scholar] [CrossRef] [Green Version]
- Seitz, J.; Jahn, J.; Boronat, J.G.; Vaupel, T.; Meyer, S.; Thielecke, J. A hidden markov model for urban navigation based on fingerprinting and pedestrian dead reckoning. In Proceedings of the 2010 13th International Conference on Information Fusion, Edinburgh, UK, 26–29 July 2010; pp. 1–8. [Google Scholar]
- Hoang, M.K.; Schmalenstroeer, J.; Drueke, C.; Vu, D.T.; Haeb-Umbach, R. A hidden Markov model for indoor user tracking based on WiFi fingerprinting and step detection. In Proceedings of the 21st European Signal Processing Conference (EUSIPCO 2013), Marrakech, Morocco, 9–13 September 2013; pp. 1–5. [Google Scholar]
- Tiku, S.; Pasricha, S.; Notaros, B.; Han, Q. A Hidden Markov Model based smartphone heterogeneity resilient portable indoor localization framework. J. Syst. Archit. 2020, 108, 101806. [Google Scholar] [CrossRef]
- Baum, L.; Petrie, T. Statistical inference for probabilistic functions of finite state Markov chains. Ann. Math. Stat. 1966, 37, 1554–1563. [Google Scholar] [CrossRef]
- Rabiner, L.; Juang, B. An introduction to hidden Markov models. IEEE ASSP Mag. 1986, 3, 4–16. [Google Scholar] [CrossRef]
- Rabiner, L. A tutorial on hidden Markov models and selected applications in speech recognition. Proc. IEEE 1989, 77, 257–286. [Google Scholar] [CrossRef]
- Yuan, W.; Schneider, M. Supporting Continuous Range Queries in Indoor Space. In Proceedings of the 2010 Eleventh International Conference on Mobile Data Management, Kansas City, MO, USA, 23–26 May 2010; pp. 209–214. [Google Scholar]
- Yang, B.; Lu, H.; Jensen, C.S. Probabilistic threshold k nearest neighbor queries over moving objects in symbolic indoor space. In Proceedings of the 13th International Conference on Extending Database Technology, Lausanne, Switzerland, 22–26 March 2010; pp. 335–346. [Google Scholar]
- Kang, H.; Li, K. A Standard Indoor Spatial Data Model—OGC IndoorGML and Implementation Approaches. ISPRS Int. J. Geo-Inf. 2017, 6, 116. [Google Scholar] [CrossRef]
- Bohannon, R.W. Comfortable and maximum walking speed of adults aged 20–79 years: Reference values and determinants. Age Ageing 1997, 26, 15–19. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fritz, S.; Lusardi, M. White paper: “Walking speed: The sixth vital sign”. J. Geriatr. Phys. Ther. 2009, 32, 2–5. [Google Scholar] [CrossRef] [Green Version]
- Li, H.; Lu, H.; Chen, X.; Chen, G.; Chen, K.; Shou, L. Vita: A versatile toolkit for generating indoor mobility data for real-world buildings. Proc. VLDB Endow. 2016, 9, 1453–1456. [Google Scholar] [CrossRef] [Green Version]
- Bose, A.; Foh, C.H. A practical path loss model for indoor WiFi positioning enhancement. In Proceedings of the 2007 6th International Conference on Information, Communications & Signal Processing, Singapore, 10–13 December 2007; pp. 1–5. [Google Scholar]
- ISO. Industry Foundation Classes (IFC) for Data Sharing in the Construction and Facility Management Industries—Part 1: Data Schema. In The Standard; International Organization for Standardization: Geneva, Switzerland, 2018. [Google Scholar]
- Grandini, M.; Bagli, E.; Visani, G. Metrics for multi-class classification: An overview. arXiv 2020, arXiv:2008.05756. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Features | Real Site | Synthetic Site |
|---|---|---|
| Number of unit spaces | 4F: 30 | 1F: 27, 2F: 33, 3F: 37 |
| Area (meters × meters) | 76.3 × 35.2 | 78.1 × 36.6 |
| Data format | OpenStreetMap XML | IFC file [78] |
| Data size (KBytes) | 51.2 | 43,142.5 |
| Number of trajectories | 35 | 180 |
| Number of points | 3093 | 13,436 |
| Sampling rates (seconds) | 1 | 1 |
| Average of error (meters) | - | 2.1350 |
| Variance of error (meters) | - | 1.9590 |
| Positioning algorithm | Hybrid | Trilateration |
| Features | Information |
|---|---|
| Device name | Xiaomi mi5 |
| Processor | Snapdragon 820 Quad-core Kryo 1.8 GHz |
| Memory | 3 GB LPDDR4 dual-channel RAM and 32 GB UFS 2.0 Flash |
| Size of window | 30 |
| Radius of buffer | 1.5 m |
| Setup methods | and |
| Experiment Site | Real Site | Simple Site | ||
|---|---|---|---|---|
| NSMM accuracy | <80% | >80% | <80% | >80% |
| Best USMM A matrix option | AT & AH | AT | AT | AT |
| Best USMM B matrix option | BS | BS | BC | BC |
| Best buffer size r | 2.5 | 0.5 | 2 | 1.5 |
| Best window size w | 8 & 10 | 2 | 38 | 8 |
| Performance of IDC | Well | Normal | Well | Normal |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, T.; Kim, K.-S.; Li, K.-J. Improving Room-Level Location for Indoor Trajectory Tracking with Low IPS Accuracy. ISPRS Int. J. Geo-Inf. 2021, 10, 620. https://doi.org/10.3390/ijgi10090620
Kim T, Kim K-S, Li K-J. Improving Room-Level Location for Indoor Trajectory Tracking with Low IPS Accuracy. ISPRS International Journal of Geo-Information. 2021; 10(9):620. https://doi.org/10.3390/ijgi10090620
Chicago/Turabian StyleKim, Taehoon, Kyoung-Sook Kim, and Ki-Joune Li. 2021. "Improving Room-Level Location for Indoor Trajectory Tracking with Low IPS Accuracy" ISPRS International Journal of Geo-Information 10, no. 9: 620. https://doi.org/10.3390/ijgi10090620
APA StyleKim, T., Kim, K.-S., & Li, K.-J. (2021). Improving Room-Level Location for Indoor Trajectory Tracking with Low IPS Accuracy. ISPRS International Journal of Geo-Information, 10(9), 620. https://doi.org/10.3390/ijgi10090620