
Predicting Spatiotemporal Demand of Dockless E-Scooter Sharing Services with a Masked Fully Convolutional Network


Abstract
:1. Introduction
2. Materials and Methods
2.1. Dataset
2.2. Predictive Model
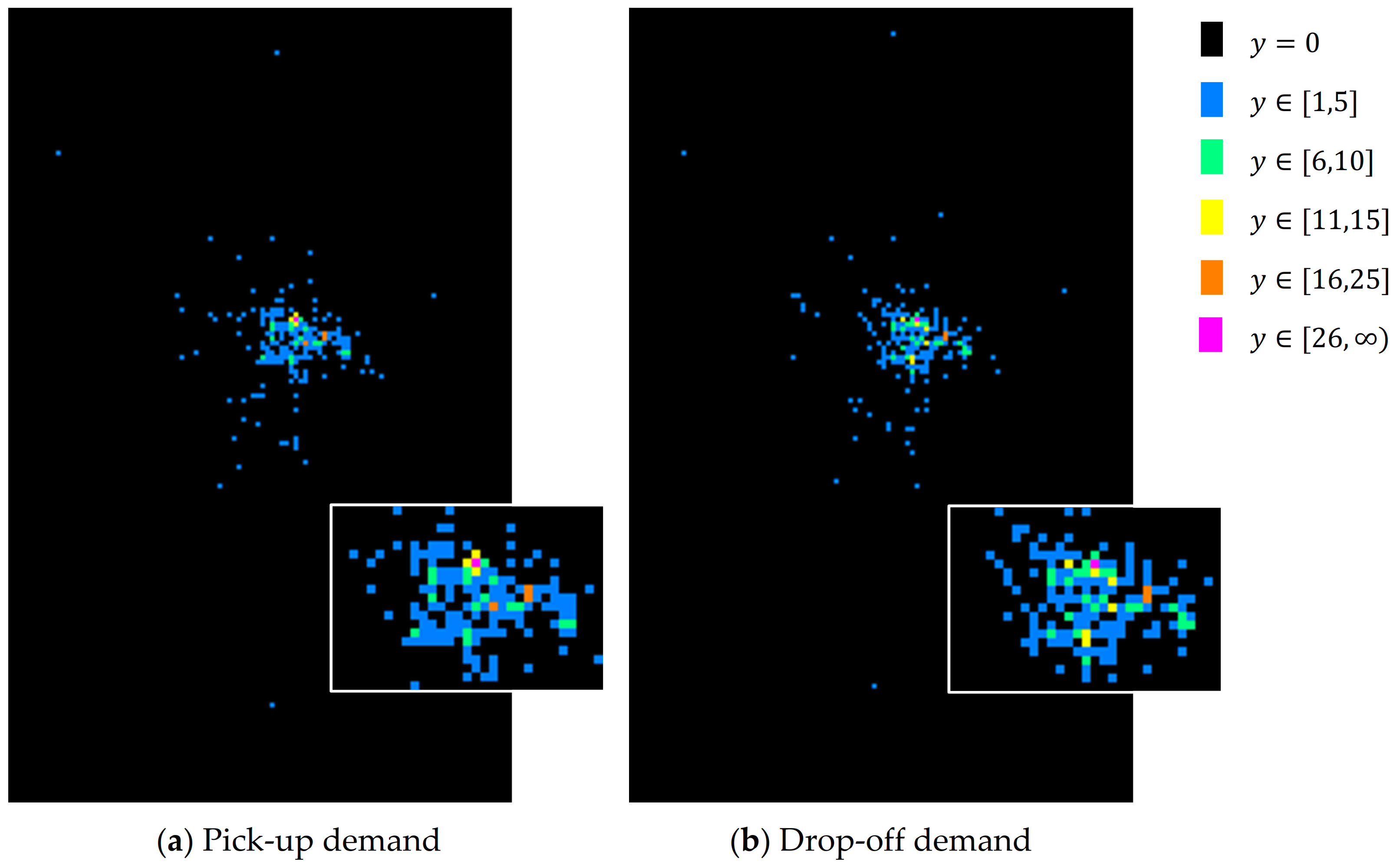
2.2.1. Data Preparation
2.2.2. Global Masking
2.2.3. Feature Selection
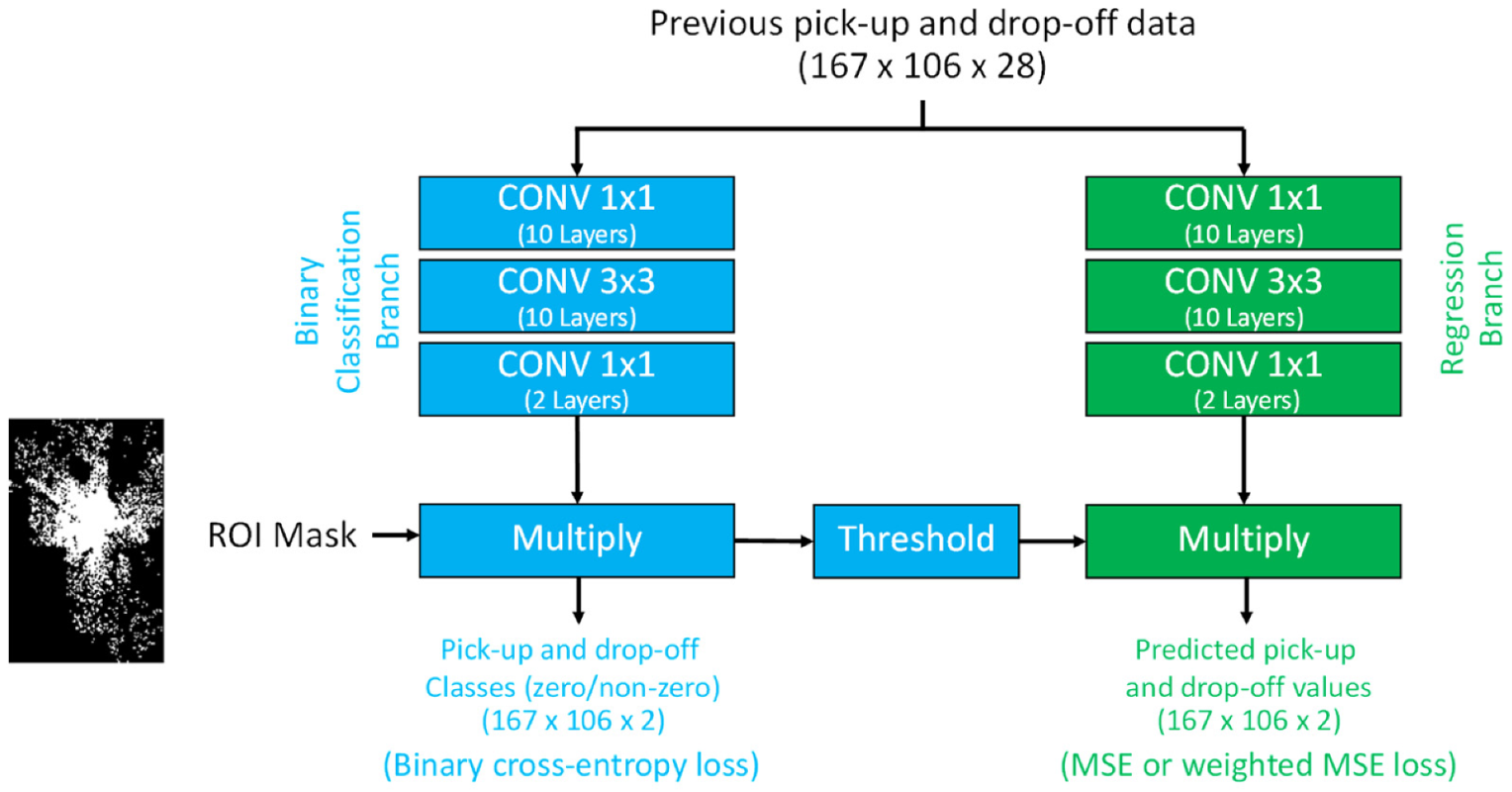
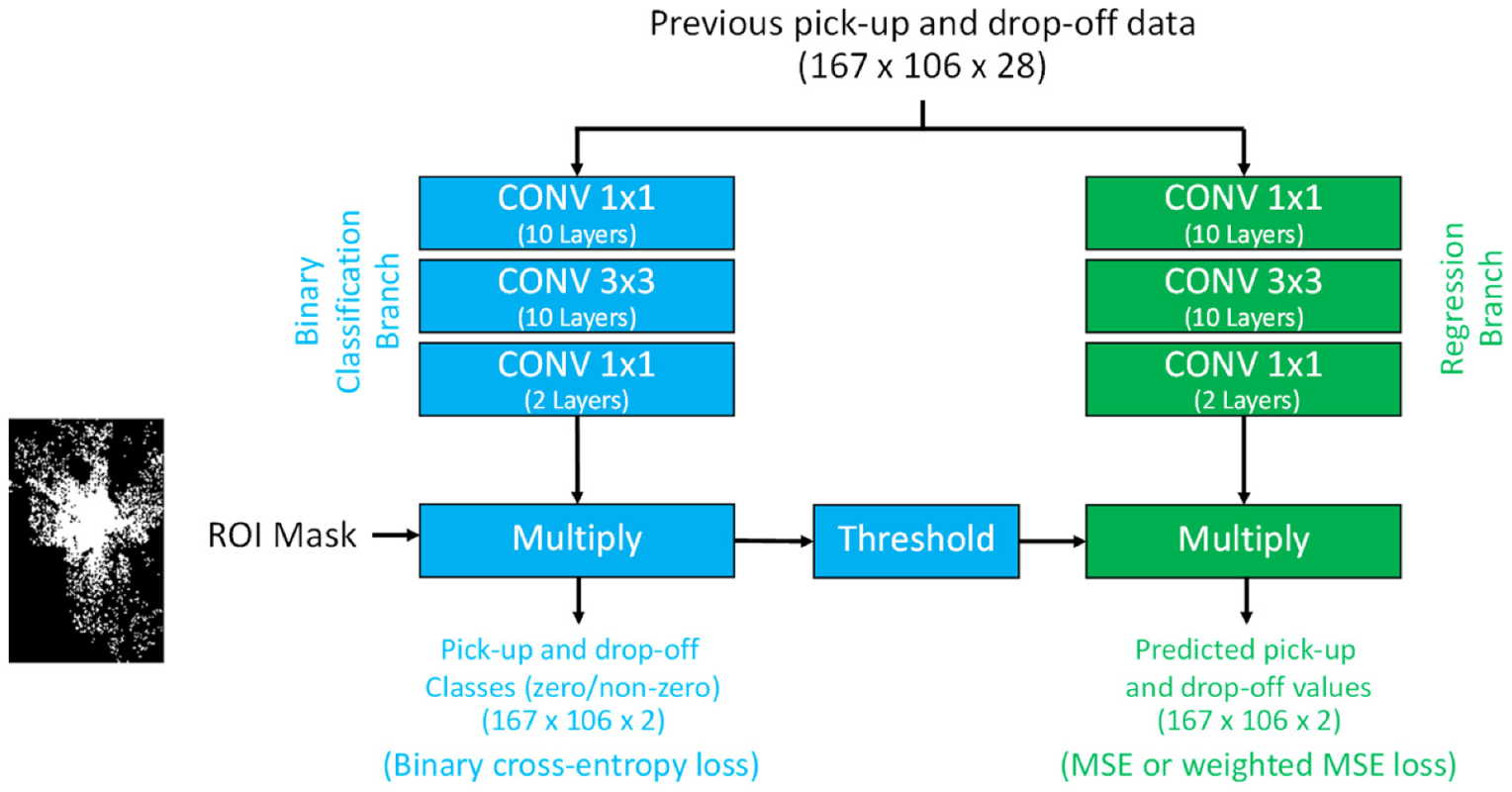
2.2.4. Network Architecture
2.2.5. Loss Function
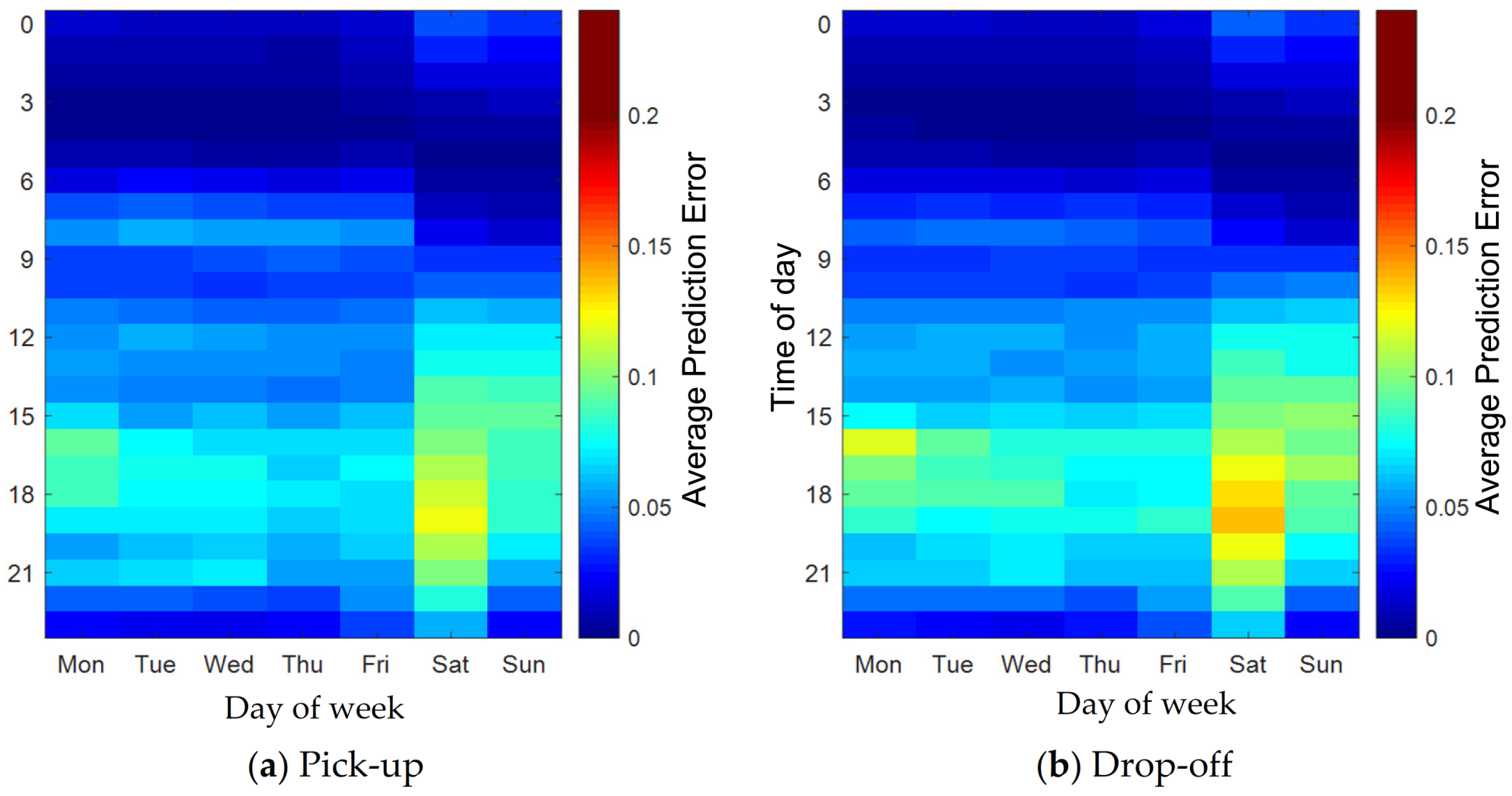
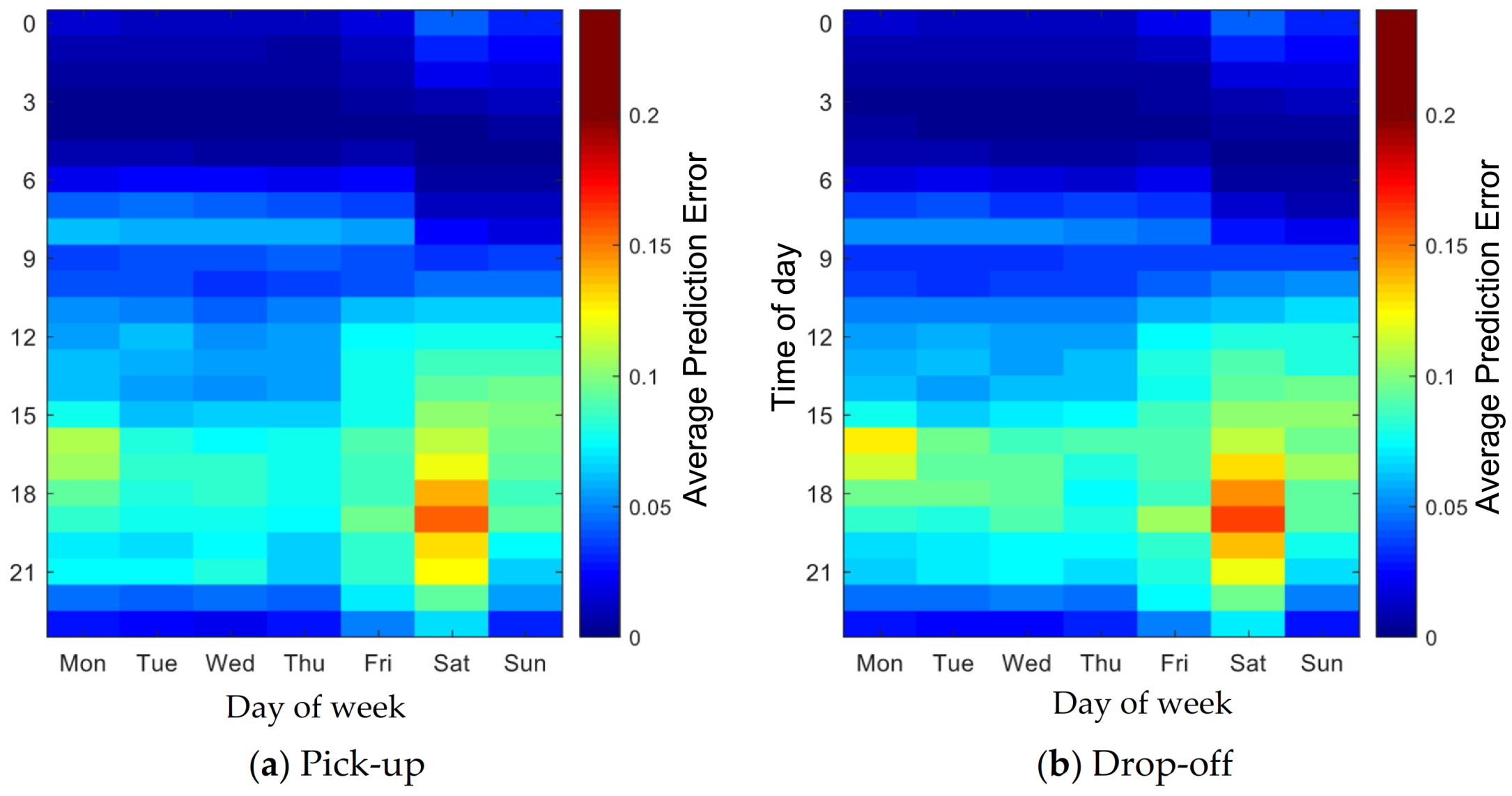
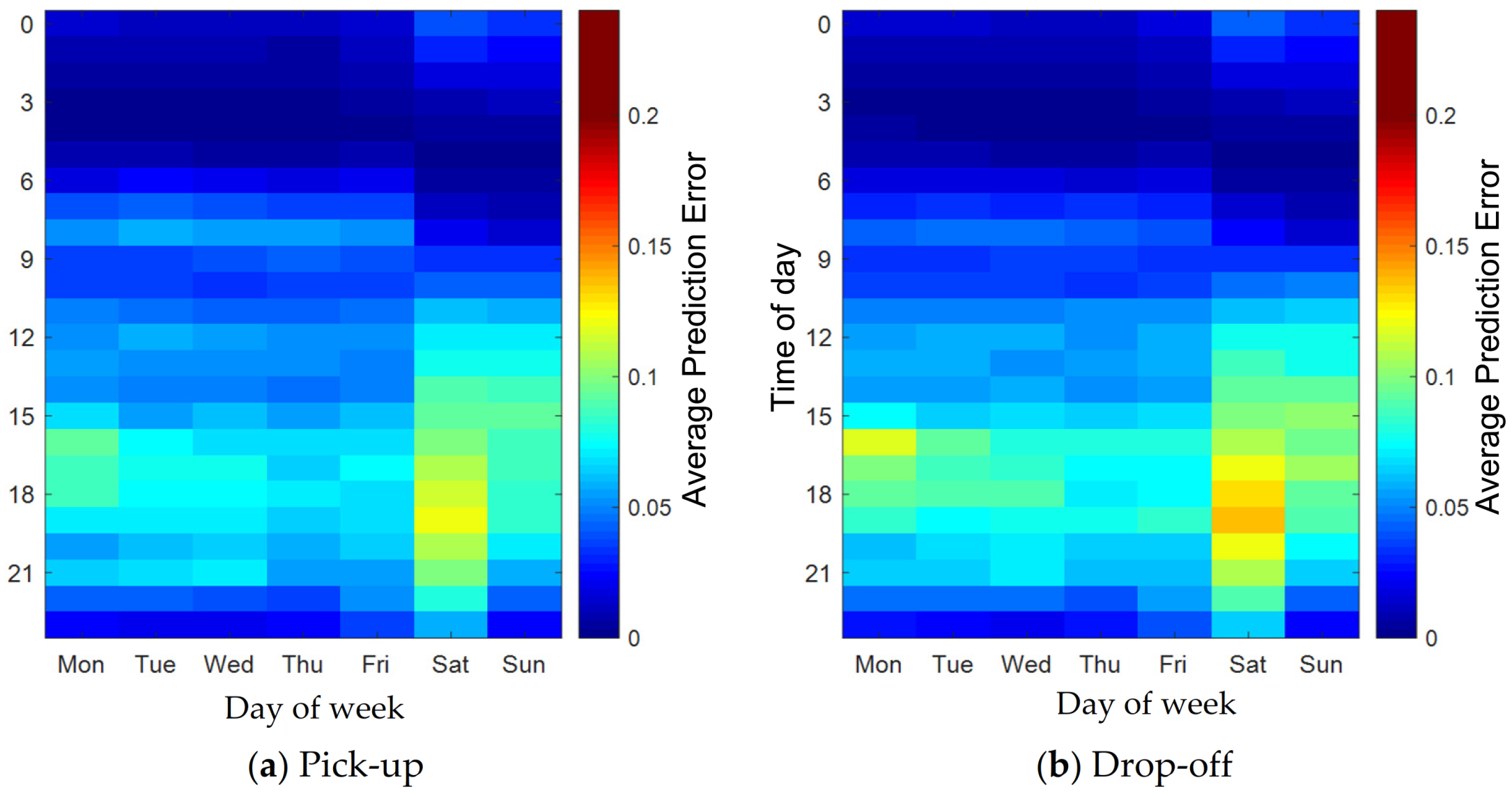
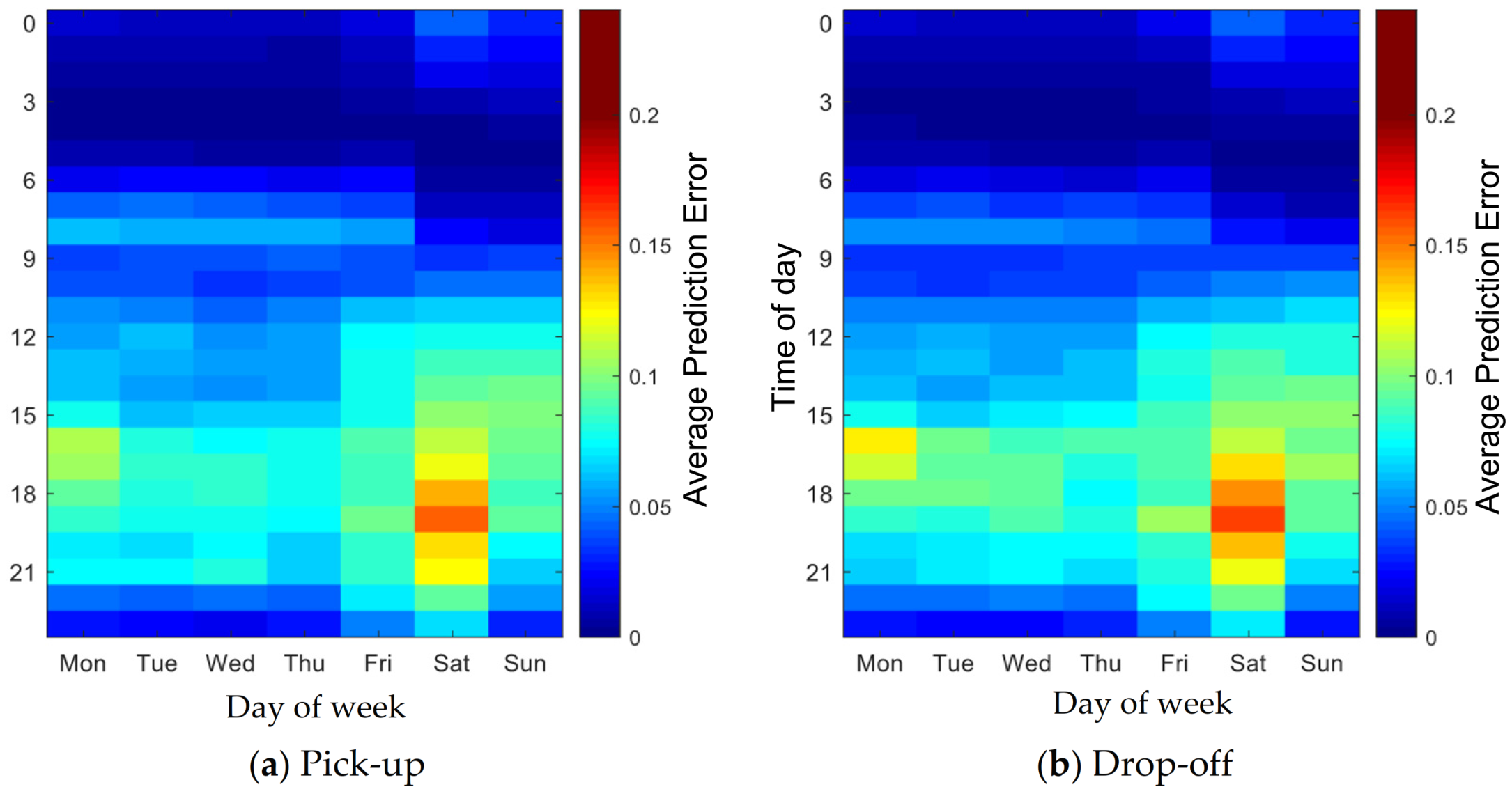
3. Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gössling, S. Integrating E-Scooters in Urban Transportation: Problems, Policies, and the Prospect of System Change. Transp. Res. Part D Transp. Environ. 2020. [Google Scholar] [CrossRef]
- McKenzie, G. Spatiotemporal Comparative Analysis of Scooter-Share and Bike-Share Usage Patterns in Washington, D.C. J. Transp. Geogr. 2019, 78, 19–28. [Google Scholar] [CrossRef]
- Chang, A.Y.; Miranda-Moreno, L.; Clewlow, R.; Sun, L. Trend or Fad? Deciphering the Enablers of Micromobility in the U.S.; SAE International: Warrendale, PA, USA, 2019. [Google Scholar]
- Hosseinzadeh, A.; Algomaiah, M.; Kluger, R.; Li, Z. E-Scooters and Sustainability: Investigating the Relationship between the Density of E-Scooter Trips and Characteristics of Sustainable Urban Development. Sustain. Cities Soc. 2020, 66, 102624. [Google Scholar] [CrossRef]
- Sedor, A.; Oriold, J. Shared E-Bike and E-Scooter Final Pilot Report. In Proceedings of the SPC on Transportation and Transit, Calgary, AL, Canada, 16 December 2020. [Google Scholar]
- Fearnley, N.; Johnsson, E.; Berge, S.H. Patterns of E-Scooter Use in Combination with Public Transport. Findings 2020. [Google Scholar] [CrossRef]
- Moreau, H.; de Jamblinne de Meux, L.; Zeller, V.; D’Ans, P.; Ruwet, C.; Achten, W.M.J. Dockless E-Scooter: A Green Solution for Mobility? Comparative Case Study between Dockless e-Scooters, Displaced Transport, and Personal e-Scooters. Sustainability 2020, 12, 1803. [Google Scholar] [CrossRef] [Green Version]
- Ham, S.W.; Cho, J.-H.; Park, S.; Kim, D.-K. Spatiotemporal Demand Prediction Model for E-Scooter Sharing Services with Latent Feature and Deep Learning. Transp. Res. Rec. 2021, 1–10. [Google Scholar] [CrossRef]
- Abduljabbar, R.L.; Liyanage, S.; Dia, H. The Role of Micro-Mobility in Shaping Sustainable Cities: A Systematic Literature Review. Transp. Res. Part D Transp. Environ. 2021, 92, 102734. [Google Scholar] [CrossRef]
- Palm, M.; Farber, S.; Shalaby, A.; Young, M. Equity Analysis and New Mobility Technologies: Toward Meaningful Interventions. J. Plan. Lit. 2021, 36, 31–45. [Google Scholar] [CrossRef]
- Abdelwahab, B.; Palm, M.; Shalaby, A.; Farber, S. Evaluating the Equity Implications of Ridehailing through a Multi-Modal Accessibility Framework. J. Transp. Geogr. 2021, 95, 103147. [Google Scholar] [CrossRef]
- Boarnet, M.G.; Giuliano, G.; Hou, Y.; Shin, E.J. First/Last Mile Transit Access as an Equity Planning Issue. Transp. Res. Part A Policy Pract. 2017, 103, 296–310. [Google Scholar] [CrossRef]
- Szmelter, A. Mobility-as-a-Service—A Challenge for It in the Age of Sharing Economy. Inf. Syst. Manag. 2018, 7, 59–71. [Google Scholar] [CrossRef]
- Herrmann, T.; Gleckner, W.; Wasfi, R.A.; Thierry, B.; Kestens, Y.; Ross, N.A. A Pan-Canadian Measure of Active Living Environments Using Open Data. Heal. Rep. 2019, 30, 16–25. [Google Scholar] [CrossRef]
- Hermosilla, T.; Palomar-Vázquez, J.; Balaguer-Beser, Á.; Balsa-Barreiro, J.; Ruiz, L.A. Using Street Based Metrics to Characterize Urban Typologies. Comput. Environ. Urban Syst. 2014, 44, 68–79. [Google Scholar] [CrossRef] [Green Version]
- Jiao, J.; Bai, S. Understanding the Shared E-Scooter Travels in Austin, TX. ISPRS Int. J. Geo-Inf. 2020, 9, 135. [Google Scholar] [CrossRef] [Green Version]
- Almannaa, M.H.; Ashqar, H.I.; Elhenawy, M.; Masoud, M.; Rakotonirainy, A.; Rakha, H. A Comparative Analysis of E-Scooter and E-Bike Usage Patterns: Findings from the City of Austin, TX. arXiv 2020, arXiv:2006.04033. [Google Scholar] [CrossRef]
- Le Figaro Trottinettes: La Mairie de Paris Veut Une Réglementation Nationale. Available online: http://www.lefigaro.fr/flash-eco/2018/09/09/97002-20180909FILWWW00064-trottinettes-la-mairie-de-paris-veut-une-reglementation-nationale.php (accessed on 28 December 2020).
- Times, L.A. Approves Rules for Thousands of Scooters, with a 15-Mph Speed Limit and Aid for Low-Income Riders. Available online: https://www.latimes.com/local/lanow/la-me-ln-scooter-vote-20180904-story.html (accessed on 22 December 2020).
- Seattle Department of Transportation Seattle Department of Transportation (SDOT) Response to City Council Resolution 31898, Requesting That the Seattle Department of Transportation Develop a Budget Proposal for Creating on-Street Bike and e-Scooter Parking. Available online: http://clerk.seattle.gov/search/clerk-files/321445 (accessed on 27 December 2020).
- Streets Blog LA Santa Monica Installs In-Street E-Scooter Parking Corrals. Available online: https://la.streetsblog.org/2018/11/08/santa-monica-installs-in-street-e-scooter-parking-corrals/ (accessed on 27 December 2020).
- Fanchao, L.; Gonçalo, C. Electric Carsharing and Micromobility: A Literature Review on Their Usage Pattern, Demand, and Potential Impacts. Int. J. Sustain. Transp. 2020, 1–30. [Google Scholar] [CrossRef]
- Hardt, C.; Bogenberger, K. Usage of E-Scooters in Urban Environments. Transp. Res. Procedia 2019, 37, 155–162. [Google Scholar] [CrossRef]
- Portland Bureau of Transportation. 2018 E-Scooter Findings Report; Portland Bureau of Transportation: Portland, OR, USA, 2019. [Google Scholar]
- Bai, S.; Jiao, J. Dockless E-Scooter Usage Patterns and Urban Built Environments: A Comparison Study of Austin, TX, and Minneapolis, MN. Travel Behav. Soc. 2020, 20, 264–272. [Google Scholar] [CrossRef]
- Caspi, O.; Smart, M.J.; Noland, R.B. Spatial Associations of Dockless Shared E-Scooter Usage. Transp. Res. Part D Transp. Environ. 2020, 86, 102396. [Google Scholar] [CrossRef]
- Trivedi, T.K.; Liu, C.; Antonio, A.L.M.; Wheaton, N.; Kreger, V.; Yap, A.; Schriger, D.; Elmore, J.G. Injuries Associated With Standing Electric Scooter Use. JAMA Netw. Open 2019, 2, e187381. [Google Scholar] [CrossRef]
- James, O.; Swiderski, J.I.; Hicks, J.; Teoman, D.; Buehler, R. Pedestrians and E-Scooters: An Initial Look at e-Scooter Parking and Perceptions by Riders and Non-Riders. Sustainability 2019, 11, 5591. [Google Scholar] [CrossRef] [Green Version]
- Hollingsworth, J.; Copeland, B.; Johnson, J.X. Are E-Scooters Polluters? The Environmental Impacts of Shared Dockless Electric Scooters. Environ. Res. Lett. 2019, 14, 084031. [Google Scholar] [CrossRef]
- Balsa-Barreiro, J.; Valero-Mora, P.M.; Menéndez, M.; Mehmood, R. Extraction of Naturalistic Driving Patterns with Geographic Information Systems. Mob. Netw. Appl. 2020, 1–17. [Google Scholar] [CrossRef]
- Montero, L.; Codina, E.; Barceló, J. Dynamic OD Transit Matrix Estimation: Formulation and Model-Building Environment. In Advances in Intelligent Systems and Computing; Springer: New York, NY, USA, 2015. [Google Scholar]
- Kaeoruean, K.; Phithakkitnukoon, S.; Demissie, M.G.; Kattan, L.; Ratti, C. Analysis of Demand–Supply Gaps in Public Transit Systems Based on Census and GTFS Data: A Case Study of Calgary, Canada. Public Transp. 2020, 12, 483–516. [Google Scholar] [CrossRef]
- Prommaharaj, P.; Phithakkitnukoon, S.; Demissie, M.G.; Kattan, L.; Ratti, C. Visualizing Public Transit System Operation with GTFS Data: A Case Study of Calgary, Canada. Heliyon 2020, 6, e03729. [Google Scholar] [CrossRef]
- Demissie, M.G.; Phithakkitnukoon, S.; Sukhvibul, T.; Antunes, F.; Gomes, R.; Bento, C. Inferring Passenger Travel Demand to Improve Urban Mobility in Developing Countries Using Cell Phone Data: A Case Study of Senegal. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2466–2478. [Google Scholar] [CrossRef]
- Hankaew, S.; Phithakkitnukoon, S.; Demissie, M.G.; Kattan, L.; Smoreda, Z.; Ratti, C. Inferring and Modeling Migration Flows Using Mobile Phone Network Data. IEEE Access 2019, 7, 164746–164758. [Google Scholar] [CrossRef]
- Demissie, M.G.; Phithakkitnukoon, S.; Kattan, L. Trip Distribution Modeling Using Mobile Phone Data: Emphasis on Intra-Zonal Trips. IEEE Trans. Intell. Transp. Syst. 2019, 20, 2605–2617. [Google Scholar] [CrossRef]
- Soliman, A.; Soltani, K.; Yin, J.; Padmanabhan, A.; Wang, S. Social Sensing of Urban Land Use Based on Analysis of Twitter Users’ Mobility Patterns. PLoS ONE 2017, 12, e0181657. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ke, J.; Zheng, H.; Yang, H.; Chen, X. Short-Term Forecasting of Passenger Demand under on-Demand Ride Services: A Spatio-Temporal Deep Learning Approach. Transp. Res. Part C Emerg. Technol. 2017, 85, 591–608. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.; Hou, Y.; Barth, M. Data-Driven Multi-Step Demand Prediction for Ride-Hailing Services Using Convolutional Neural Network. In Advances in Computer Vision; Springer: New York, NY, USA, 2020. [Google Scholar]
- Demissie, M.G.; Kattan, L.; Phithakkitnukoon, S.; Homem de Almeida Correia, G.; Veloso, M.; Bento, C. Modeling Location Choice of Taxi Drivers for Passenger Pick-Up Using GPS Data. IEEE Intell. Transp. Syst. Mag. 2020, 70–90. [Google Scholar] [CrossRef]
- Mungthanya, W.; Phithakkitnukoon, S.; Demissie, M.G.; Kattan, L.; Veloso, M.; Bento, C.; Ratti, C. Constructing Time-Dependent Origin-Destination Matrices with Adaptive Zoning Scheme and Measuring Their Similarities with Taxi Trajectory Data. IEEE Access 2019, 7, 77723–77737. [Google Scholar] [CrossRef]
- Kunama, N.; Worapan, M.; Phithakkitnukoon, S.; Demissie, M. GTFS-VIZ: Tool for Preprocessing and Visualizing GTFS Data. In UbiComp/ISWC 2017, Proceedings of the 2017 ACM International Joint Conference on Pervasive and Ubiquitous Computing and Proceedings of the 2017 ACM International Symposium on Wearable Computers, Maui, Hawaii, 11–17 September 2017; Association for Computing Machinery: New York, NY, USA, 2017. [Google Scholar]
- Kinjarapu, A.; Demissie, M.G.; Kattan, L.; Duckworth, R. Applications of Passive GPS Data to Characterize the Movement of Freight Trucks—A Case Study in the Calgary Region of Canada. IEEE Trans. Intell. Transp. Syst. 2021, 1–16. [Google Scholar] [CrossRef]
- Mei, B. Destination Choice Model for Commercial Vehicle Movements in Metropolitan Area. Transp. Res. Rec. 2013, 2344, 126–134. [Google Scholar] [CrossRef]
- Sanders, R.L.; Branion-Calles, M.; Nelson, T.A. To scoot or not to scoot: Findings from a recent survey about the benefits and barriers of using E-scooters for riders and non-riders. Transp. Res. Part A Policy Pract. 2020, 139, 217–227. [Google Scholar] [CrossRef]
- Shelhamer, E.; Long, J.; Darrell, T. Fully Convolutional Networks for Semantic Segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 640–651. [Google Scholar] [CrossRef]
- Sultana, F.; Sufian, A.; Dutta, P. Evolution of Image Segmentation Using Deep Convolutional Neural Network: A Survey. Knowl.-Based Syst. 2020, 201–202, 1–25. [Google Scholar] [CrossRef]
- Dosovitskiy, A.; Fischery, P.; Ilg, E.; Hausser, P.; Hazirbas, C.; Golkov, V.; Van Der Smagt, P.; Cremers, D.; Brox, T. FlowNet: Learning Optical Flow with Convolutional Networks. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 2758–2766. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Medical Image Computing and Computer-Assisted Intervention—MICCAI 2015; Springer: New York, NY, USA, 2015; pp. 234–241. [Google Scholar]
- Badrinarayanan, V.; Kendall, A.; Cipolla, R. SegNet: A Deep Convolutional Encoder-Decoder Architecture for Image Segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 2481–2495. [Google Scholar] [CrossRef]
- Bowman, L.B.; Vecellio, L.R. Pedestrian Walking Speeds and Conflicts at Urban Median Locations; Transportation Research Board: Washington, DC, USA, 1994; pp. 67–73. [Google Scholar]
- González, M.C.; Hidalgo, C.A.; Barabási, A.L. Understanding Individual Human Mobility Patterns. Nature 2008, 453, 779–782. [Google Scholar] [CrossRef]
- Montgomery, D.C.; Peck, E.A.; Vining, G.G. Introduction to Linear Regression Analysis, 5th ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2012; ISBN 0470542810, 9780470542811. [Google Scholar]
- Chen, Z.; van Lierop, D.; Ettema, D. Dockless Bike-Sharing Systems: What Are the Implications? Transp. Rev. 2020, 40, 1–21. [Google Scholar] [CrossRef]
- Bieliński, T.; Ważna, A. Electric Scooter Sharing and Bike Sharing User Behaviour and Characteristics. Sustainability 2020, 12, 9640. [Google Scholar] [CrossRef]
- Phithakkitnukoon, S.; Veloso, M.; Bento, C.; Biderman, A.; Ratti, C. Taxi-Aware Map: Identifying and Predicting Vacant Taxis in the City. In Ambient Intelligence; de Ruyter, B., Ed.; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2010; Volume 6439, pp. 86–95. [Google Scholar] [CrossRef] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Prediction Scheme | |
|---|---|
| Next hour prediction | 0, 1, 22, 23, 24, 143, 166, 167, 168, 191, 335, 336, 503, 504 |
| Next 24-h prediction | 0, 1, 120, 121, 143, 144, 145, 168, 312, 313, 336, 480, 481, 648 |
| Model | Loss Function | Feature Size | No. of Parameters | MAE (Max AE) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| ROI | |||||||||||
| None | 1 | 0 | 0.0625 | 0.0162 (35.0000) | 1.8727 | 1.5047 (90.0000) | 3.8417 (31.0000) | 5.4476 (17.0000) | 7.4194 (25.0000) | 14.9825 (83.0000) | |
| Linear Regression | MSE | 28 | 58 | 0.0518 | 0.0119 (8.4370) | 1.6105 | 1.2379 (14.2270) | 3.3343 (15.8740) | 5.2931 (14.2820) | 8.6092 (20.5480) | 19.5238 (83.5030) |
| Ham et al. [8] (200 hidden states) | MSE | 10 | 2.2M | 0.0571 | 0.0085 (14.9810) | 1.9562 | 1.5040 (20.4000) | 3.8679 (16.3930) | 6.6450 (14.0320) | 11.1413 (24.0000) | 26.0813 (93.0000) |
| Proposed MFCN (3 conv) | MSE | 28 | 2.4k | 0.0434 | 0.0057 (8.0060) | 1.5180 | 1.2136 (11.4640) | 2.9911 (12.7480) | 4.5346 (13.0740) | 6.5914 (21.0440) | 16.7551 (87.3700) |
| Proposed MFCN (3 conv) | WMSE (1st order) | 28 | 2.4k | 0.0524 | 0.0098 (23.2360) | 1.7143 | 1.5319 (22.4460) | 2.4801 (29.7540) | 3.6251 (18.9810) | 5.0078 (18.6700) | 14.0859 (79.4560) |
| Proposed MFCN (3 conv) | WMSE (2nd order) | 28 | 2.4k | 0.0799 | 0.0163 (20.1900) | 2.5647 | 2.4042 (33.9710) | 3.5038 (41.0600) | 3.9200 (29.8330) | 4.3432 (20.1340) | 10.7125 (76.4970) |
| Model | Loss Function | Feature Size | No. of Parameters | MAE (Max AE) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| ROI | |||||||||||
| None | 1 | 0 | 0.0641 | 0.0174 (18.0000) | 1.8036 | 1.4707 (29.0000) | 3.8298 (23.0000) | 5.1723 (17.0000) | 8.6047 (35.0000) | 16.9434 (56.0000) | |
| Linear Regression | MSE | 28 | 58 | 0.0524 | 0.0124 (20.7040) | 1.5423 | 1.2357 (14.1930) | 3.2180 (11.1310) | 4.9081 (13.0490) | 8.2106 (23.7730) | 20.2705 (55.9280) |
| Ham et al. [8] (200 hidden states) | MSE | 10 | 2.2M | 0.0559 | 0.0078 (13.4100) | 1.8418 | 1.4465 (18.9050) | 3.6415 (12.1180) | 6.9028 (15.0000) | 12.3292 (25.0000) | 26.5623 (59.8670) |
| Proposed MFCN (3 conv) | MSE | 28 | 2.4k | 0.0464 | 0.0063 (12.4130) | 1.5382 | 1.2513 (15.3500) | 3.1714 (13.7140) | 4.5551 (13.0000) | 7.4168 (20.0910) | 19.1214 (51.5870) |
| Proposed MFCN (3 conv) | WMSE (1st order) | 28 | 2.4k | 0.0559 | 0.0115 (16.3220) | 1.7071 | 1.5275 (21.4960) | 2.6053 (15.3670) | 3.6906 (12.7310) | 5.8654 (17.5140) | 15.7879 (49.8510) |
| Proposed MFCN (3 conv) | WMSE (2nd order) | 28 | 2.4k | 0.0835 | 0.0188 (19.5390) | 2.4905 | 2.3654 (37.0830) | 3.2192 (22.8850) | 3.5912 (19.6370) | 4.6726 (24.6100) | 13.9334 (54.0960) |
| Model | Loss Function | Feature Size | No. of Parameters | MAE (Max AE) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| ROI | |||||||||||
| None | 1 | 0 | 0.0686 | 0.0186 (35.0000) | 2.0233 | 1.6139 (92.0000) | 3.9394 (86.0000) | 6.4434 (75.0000) | 8.7028 (24.0000) | 22.2807 (92.0000) | |
| Linear Regression | MSE | 28 | 58 | 0.0538 | 0.0114 (19.0860) | 1.7082 | 1.3029 (29.0070) | 3.5371 (14.0520) | 5.8054 (14.3870) | 9.0964 (23.9050) | 23.8689 (87.4850) |
| Proposed MFCN (3 conv) | MSE | 28 | 2.4k | 0.0491 | 0.0072 (12.5950) | 1.6850 | 1.3307 (16.7230) | 3.1609 (11.4780) | 5.2500 (13.5990) | 8.7423 (24.0000) | 23.9104 (88.4540) |
| Proposed MFCN (3 conv) | WMSE (1st order) | 28 | 2.4k | 0.0630 | 0.0142 (15.8010) | 1.9700 | 1.7618 (21.6630) | 2.7033 (15.5900) | 4.1097 (14.6500) | 6.2884 (24.0000) | 20.4071 (84.4270) |
| Proposed MFCN (3 conv) | WMSE (2nd order) | 28 | 2.4k | 0.1040 | 0.0212 (21.8550) | 3.3352 | 3.1745 (29.3290) | 4.3369 (28.4040) | 4.3816 (21.3830) | 4.4718 (24.0000) | 16.2115 (80.9770) |
| Model | Loss Function | Feature Size | No. of Parameters | MAE (Max AE) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| ROI | |||||||||||
| None | 1 | 0 | 0.0703 | 0.0206 (64.0000) | 1.9168 | 1.5522 (38.0000) | 3.9233 (73.0000) | 6.1527 (63.0000) | 9.4535 (55.0000) | 22.1698 (80.0000) | |
| Linear Regression | MSE | 28 | 58 | 0.0545 | 0.0140 (19.2720) | 1.5612 | 1.2385 (16.5710) | 3.2434 (12.4270) | 5.1742 (14.1640) | 8.7959 (24.9810) | 23.7204 (74.9180) |
| Proposed MFCN (3 conv) | MSE | 28 | 2.4k | 0.0501 | 0.0078 (15.2290) | 1.6230 | 1.3130 (14.8920) | 3.0823 (10.9180) | 5.2701 (13.9340) | 9.4133 (25.0000) | 24.9182 (73.9240) |
| Proposed MFCN (3 conv) | WMSE (1st order) | 28 | 2.4k | 0.0631 | 0.0142 (22.8020) | 1.8820 | 1.6979 (18.2310) | 2.6567 (15.9640) | 3.9370 (13.1260) | 6.7686 (25.0000) | 20.8505 (72.7650) |
| Proposed MFCN (3 conv) | WMSE (2nd order) | 28 | 2.4k | 0.0916 | 0.0197 (19.2700) | 2.7638 | 2.6393 (23.2960) | 3.3938 (19.7940) | 3.6898 (17.9540) | 5.4239 (24.0500) | 19.2935 (67.5760) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Phithakkitnukooon, S.; Patanukhom, K.; Demissie, M.G. Predicting Spatiotemporal Demand of Dockless E-Scooter Sharing Services with a Masked Fully Convolutional Network. ISPRS Int. J. Geo-Inf. 2021, 10, 773. https://doi.org/10.3390/ijgi10110773
Phithakkitnukooon S, Patanukhom K, Demissie MG. Predicting Spatiotemporal Demand of Dockless E-Scooter Sharing Services with a Masked Fully Convolutional Network. ISPRS International Journal of Geo-Information. 2021; 10(11):773. https://doi.org/10.3390/ijgi10110773
Chicago/Turabian StylePhithakkitnukooon, Santi, Karn Patanukhom, and Merkebe Getachew Demissie. 2021. "Predicting Spatiotemporal Demand of Dockless E-Scooter Sharing Services with a Masked Fully Convolutional Network" ISPRS International Journal of Geo-Information 10, no. 11: 773. https://doi.org/10.3390/ijgi10110773
APA StylePhithakkitnukooon, S., Patanukhom, K., & Demissie, M. G. (2021). Predicting Spatiotemporal Demand of Dockless E-Scooter Sharing Services with a Masked Fully Convolutional Network. ISPRS International Journal of Geo-Information, 10(11), 773. https://doi.org/10.3390/ijgi10110773