The Design of Prometheus: A Reconfigurable UAV for Subterranean Mine Inspection

 , , ,
, , ,  , and
, and
Abstract
1. Introduction
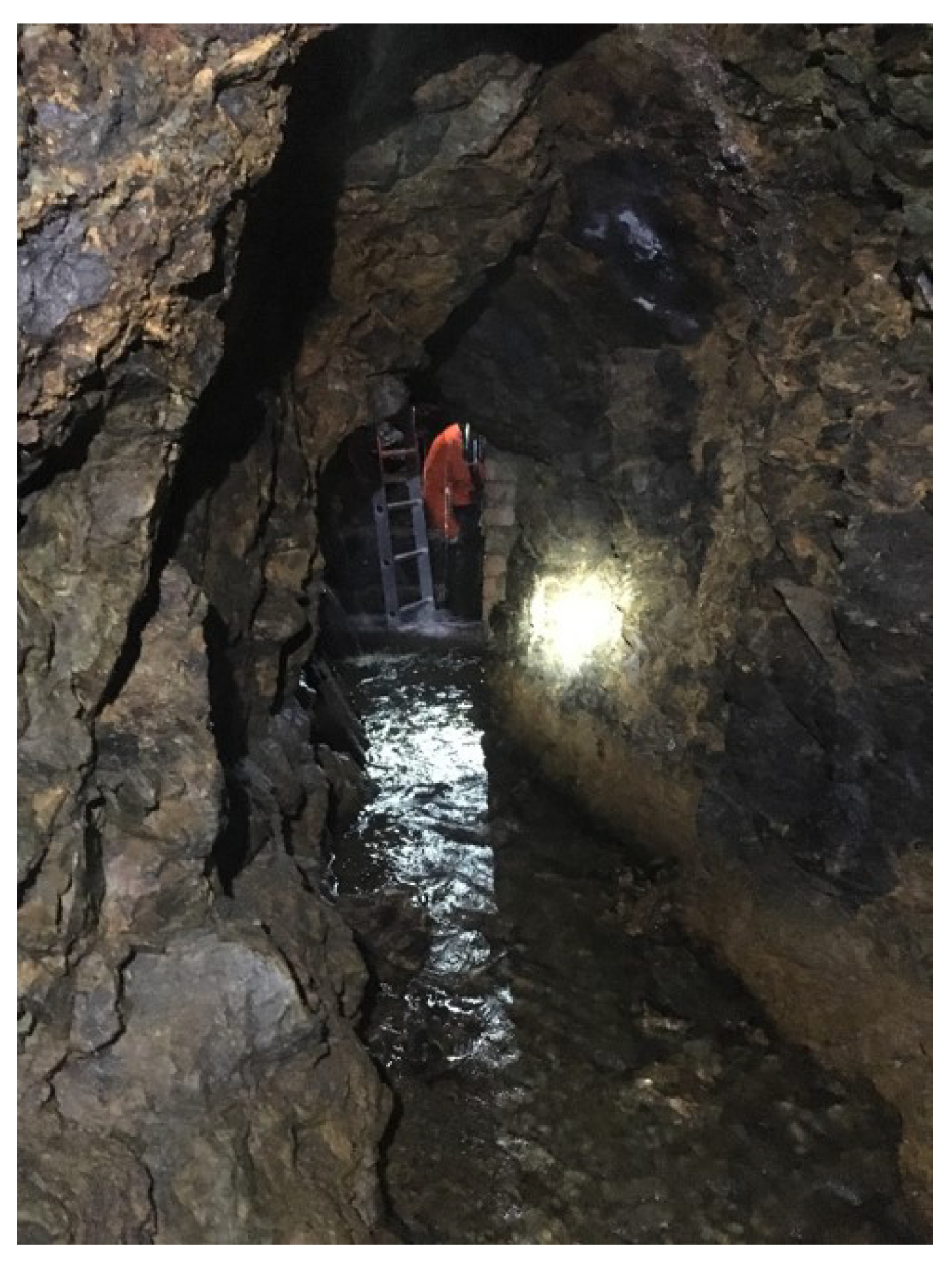
- If they are accessible and safe, the voids are entered by workers. Manual measurements and hand scanners are used to take surveys of the mines.
- If they are accessible, but unsafe to enter by workers, remotely operated robotic systems can be used to build up geometric maps of the voids.
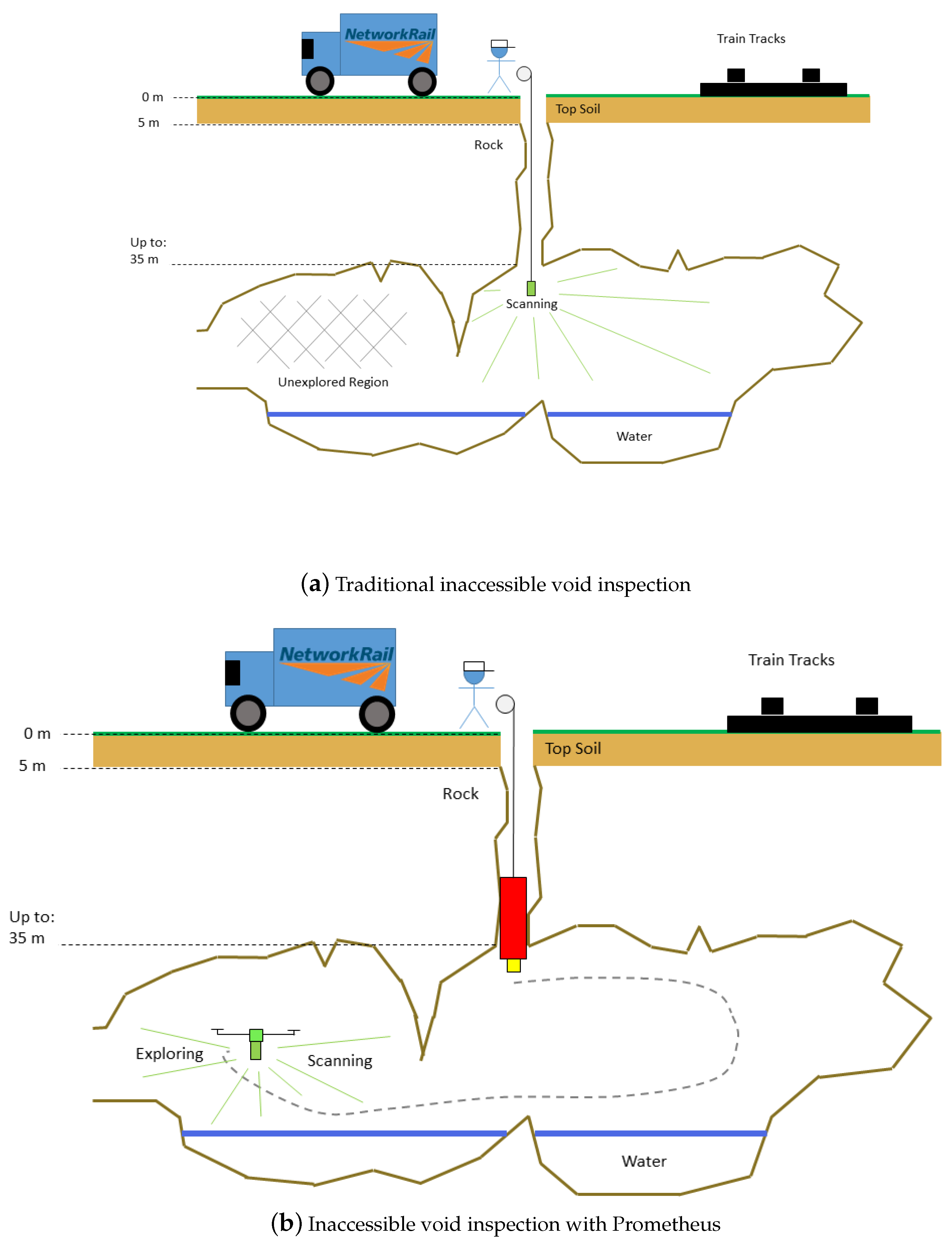
- If they are inaccessible from the surface, boreholes are sunk into the workings and from them a picture of the void can be developed.
1.1. Problem Definition
1.2. Challenges of Borehole Inspection
1.2.1. Size Constraints
1.2.2. Vertical Deployment
1.2.3. Water
- A system may not be able to land or navigate on the floor if it is unable to float.
- The presence of water may add significant disturbances to sensors.
1.2.4. Hazardous Obstacles
1.2.5. GPS Denied/Complex Workings
1.2.6. ATEX
1.3. Paper Summary
2. Literature Review
2.1. Confined Inspection UAS
2.2. Actively Reconfigurable UAS
3. System Overview
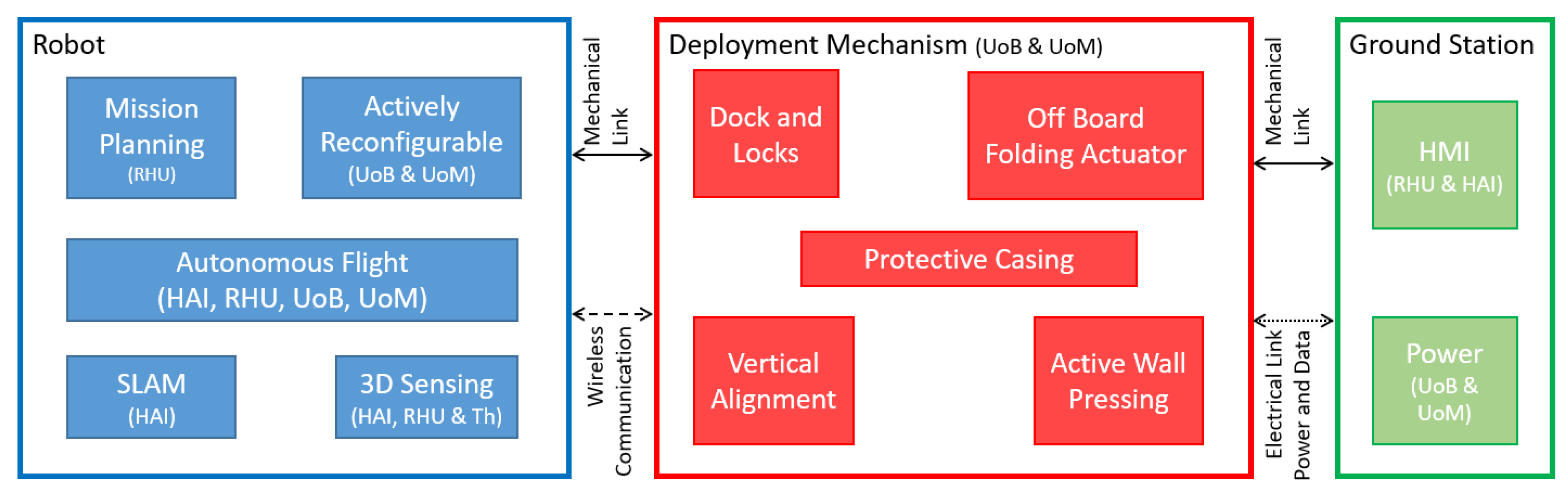
- ‘Ground Station’ (GS) (Figure 4, Green) provides the input and output of data from the rest of the system to the user (‘Human Machine Interface’ (HMI)). It is physically above ground and provides power and user input to the rest of the system.
- ‘Deployment Mechanism’ (DM) (Figure 4, Red) is responsible for deploying and extracting the robot from the surface and into the void through the borehole. It consists of a dock to allow the robot to detach and reattach to it at the start and end of the mission, respectively.
- Robot (Figure 4, Blue) completes the survey. It is an autonomous inspection UAS that explores the mine workings and captures the required data product.
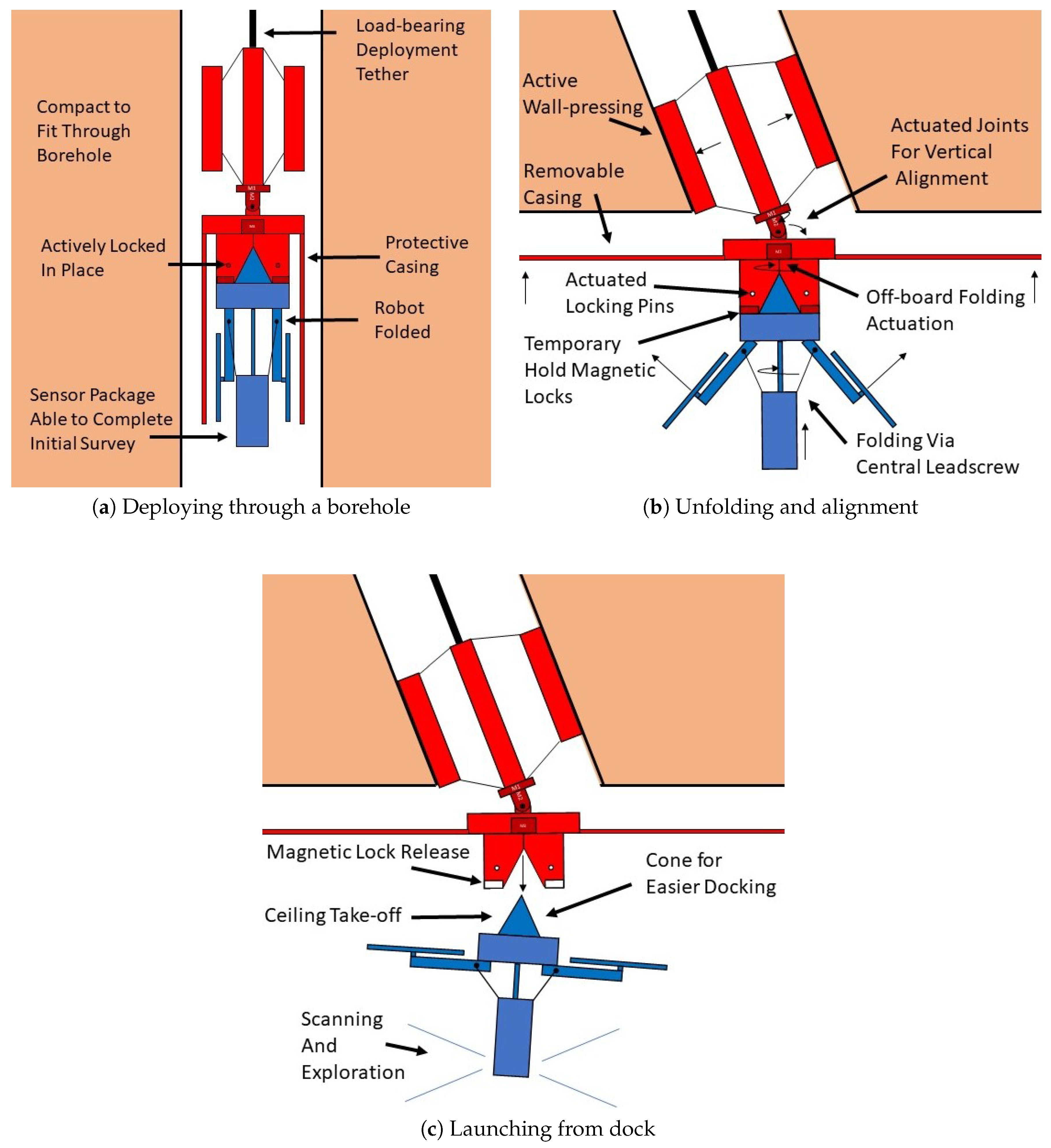
3.1. Deployment Mechanism
3.1.1. Protective Casing
3.1.2. Off-Board Folding
- Direct geared drive from off-board motor.
- Individual actuation for each arm.
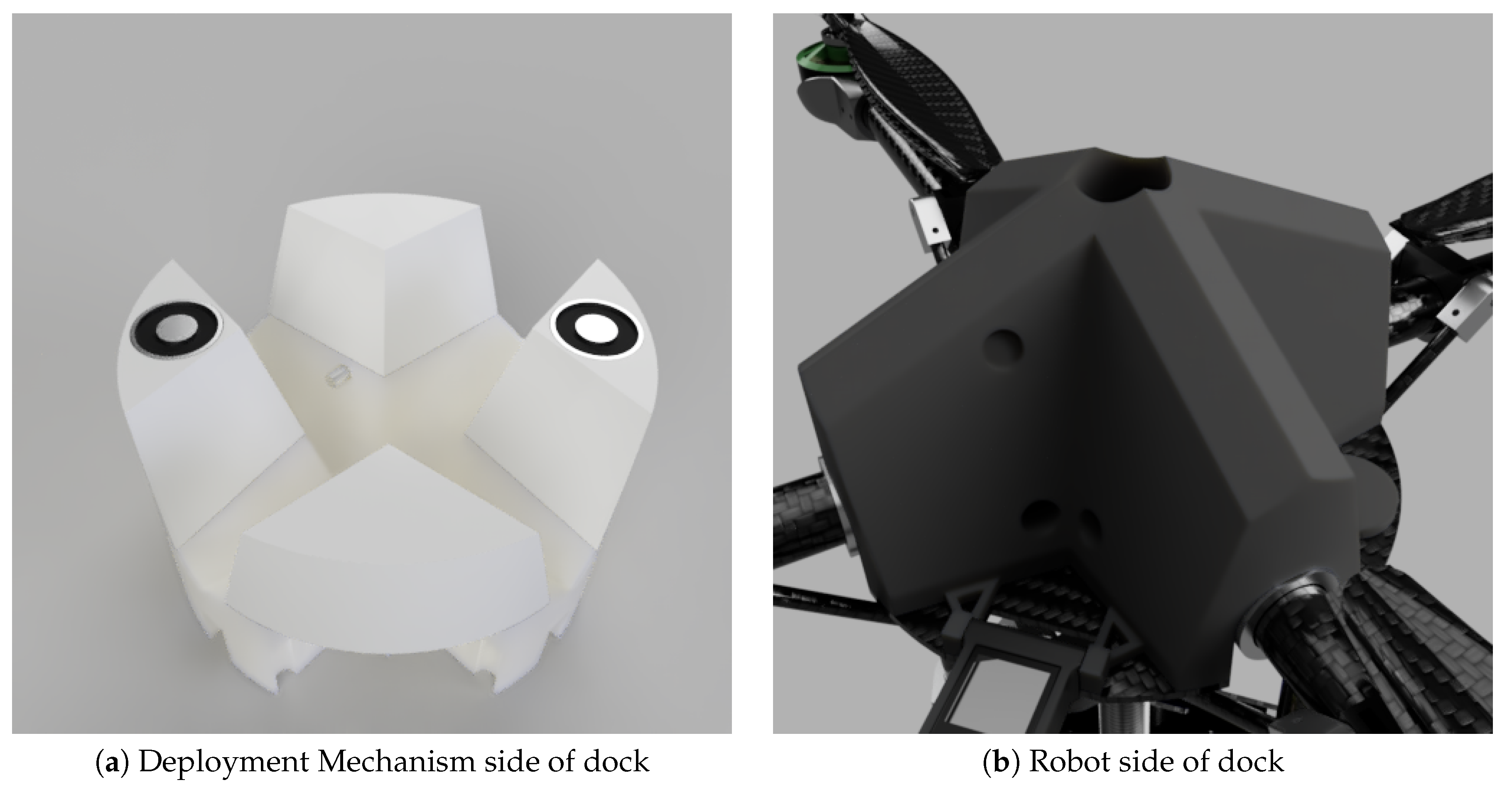
3.1.3. Dock
3.1.4. Locks
3.1.5. Active Wall-Pressing
3.1.6. Vertical Alignment
3.2. Robot
3.2.1. Reconfigurable Compact Design
- Planar.
- Aplanar arms-up.
- Aplanar arms-down.
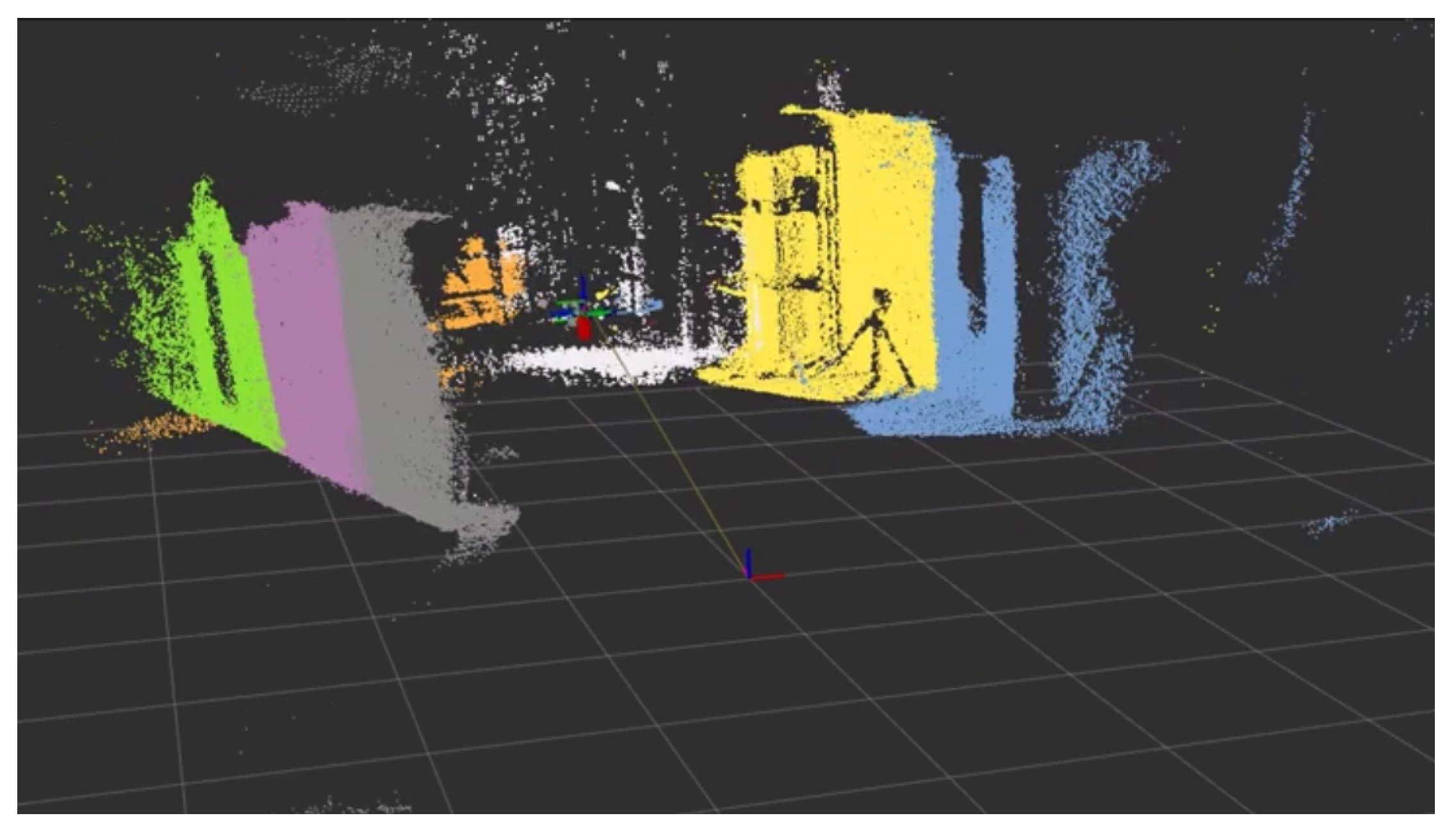
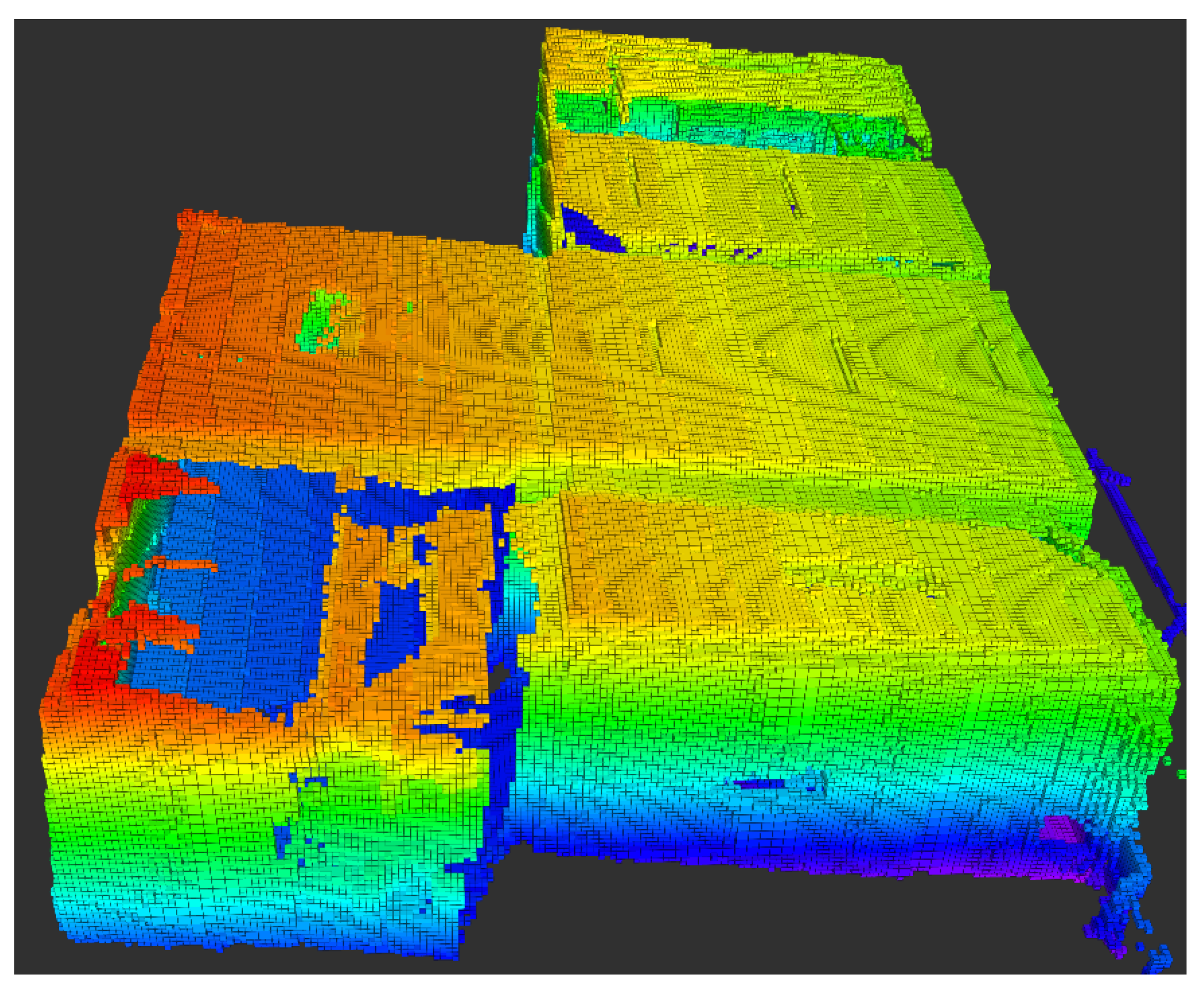
3.2.2. 3D Sensing and Mapping
3.2.3. Autonomous Flight
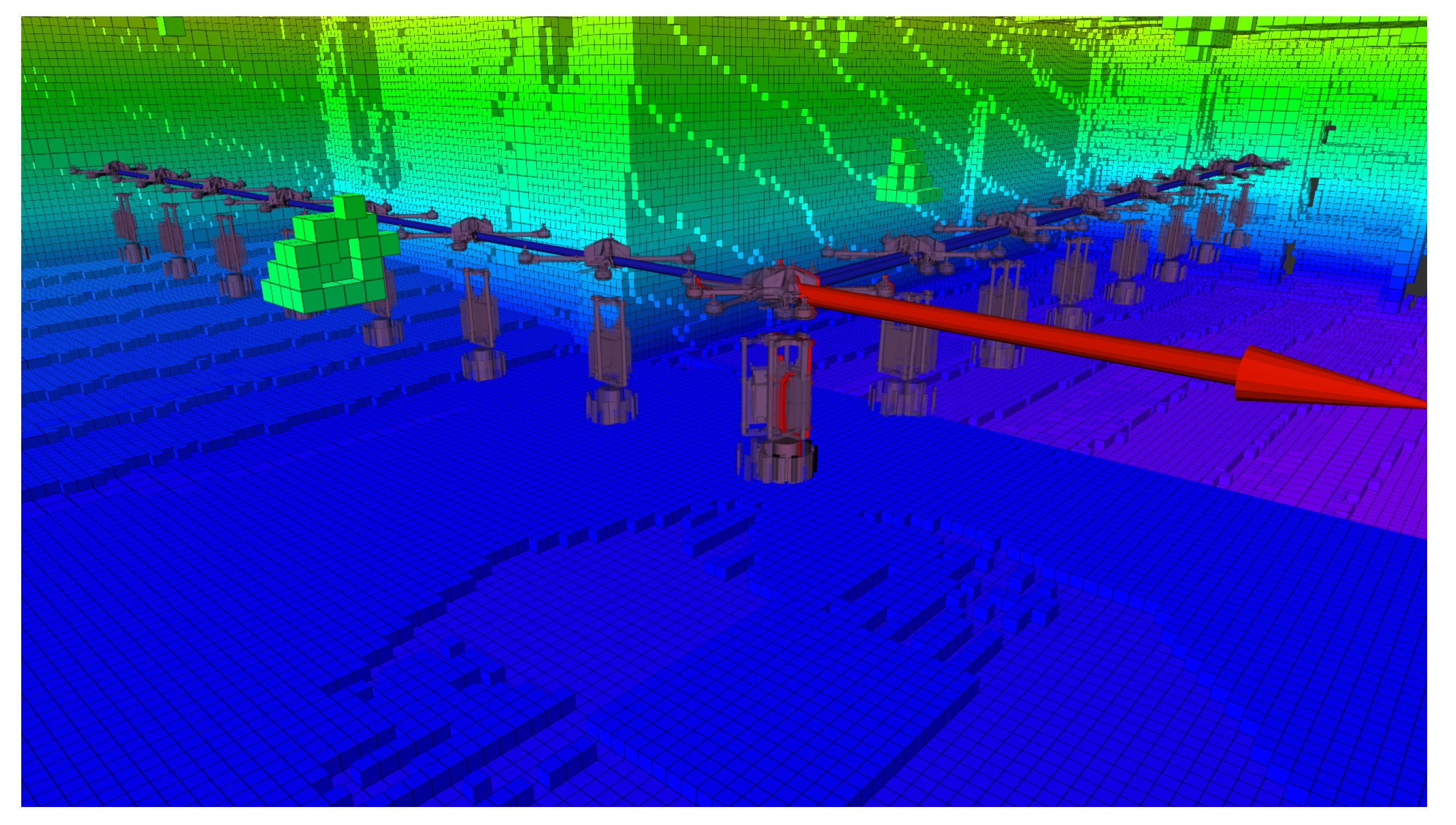
3.2.4. Mission Planning
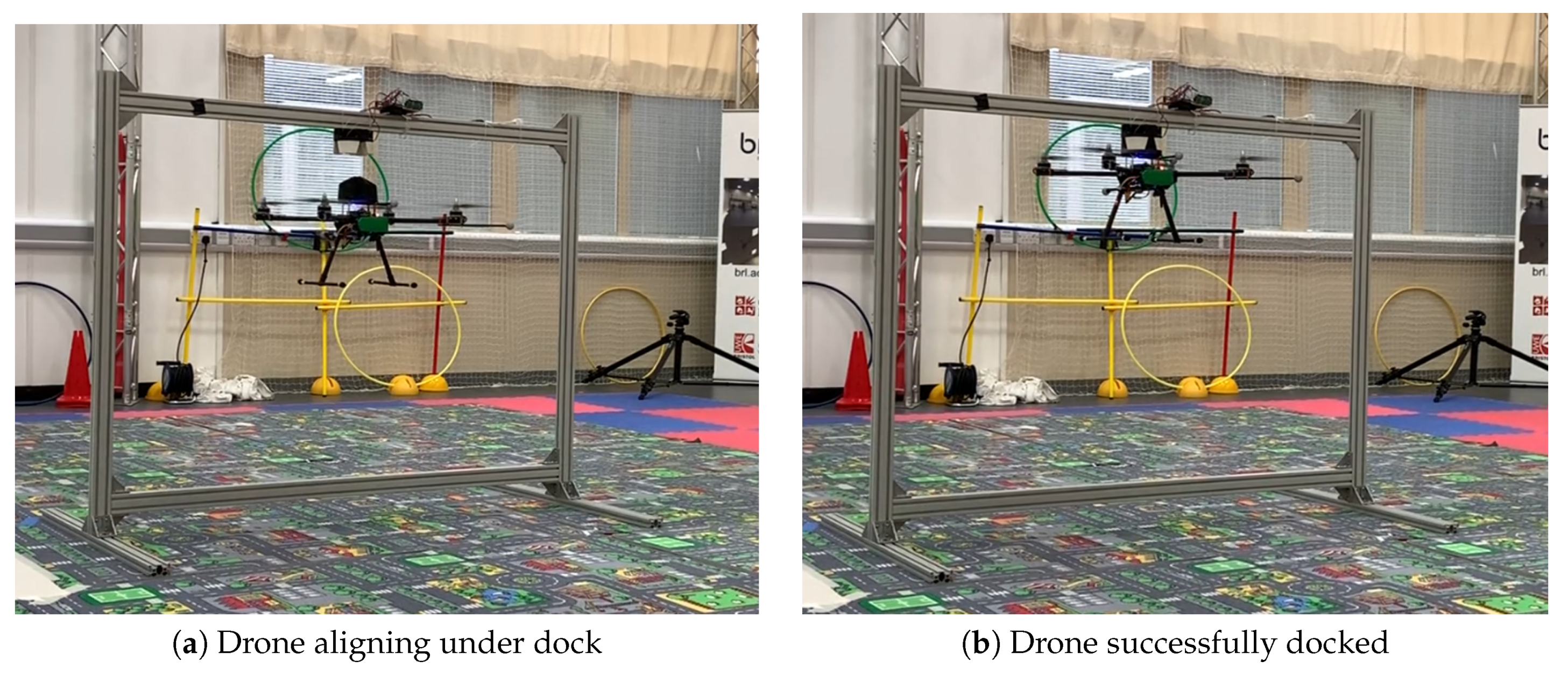
4. Preliminary Confined Flight Testing
4.1. Experimental Setup
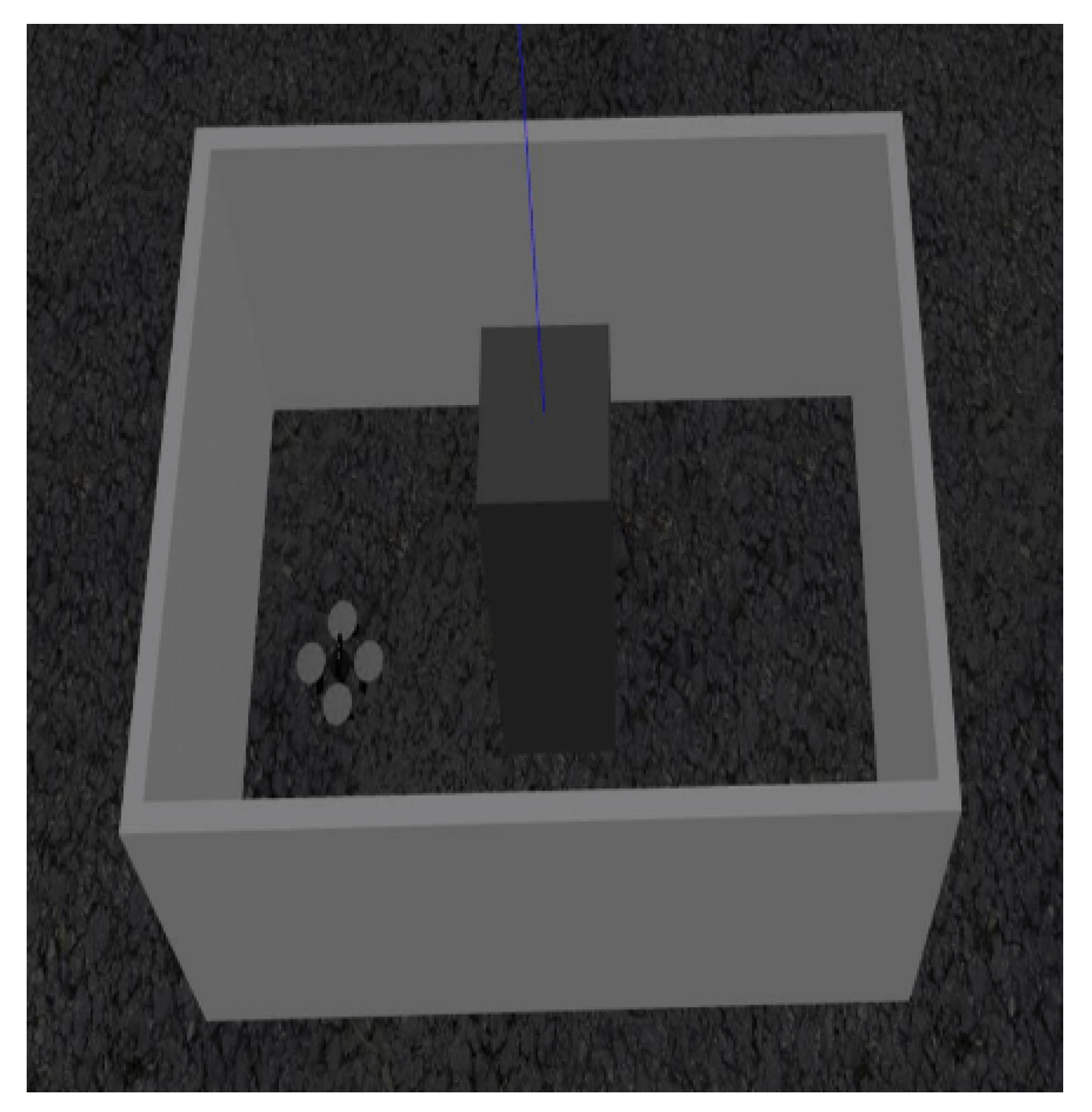
4.1.1. Confined Flight
- Test of flight controller in a confined environment.
- Test of the injection of a positions from the main on-board PC through ROS.
- Autonomous path tracking of the combined system in a confined environment.
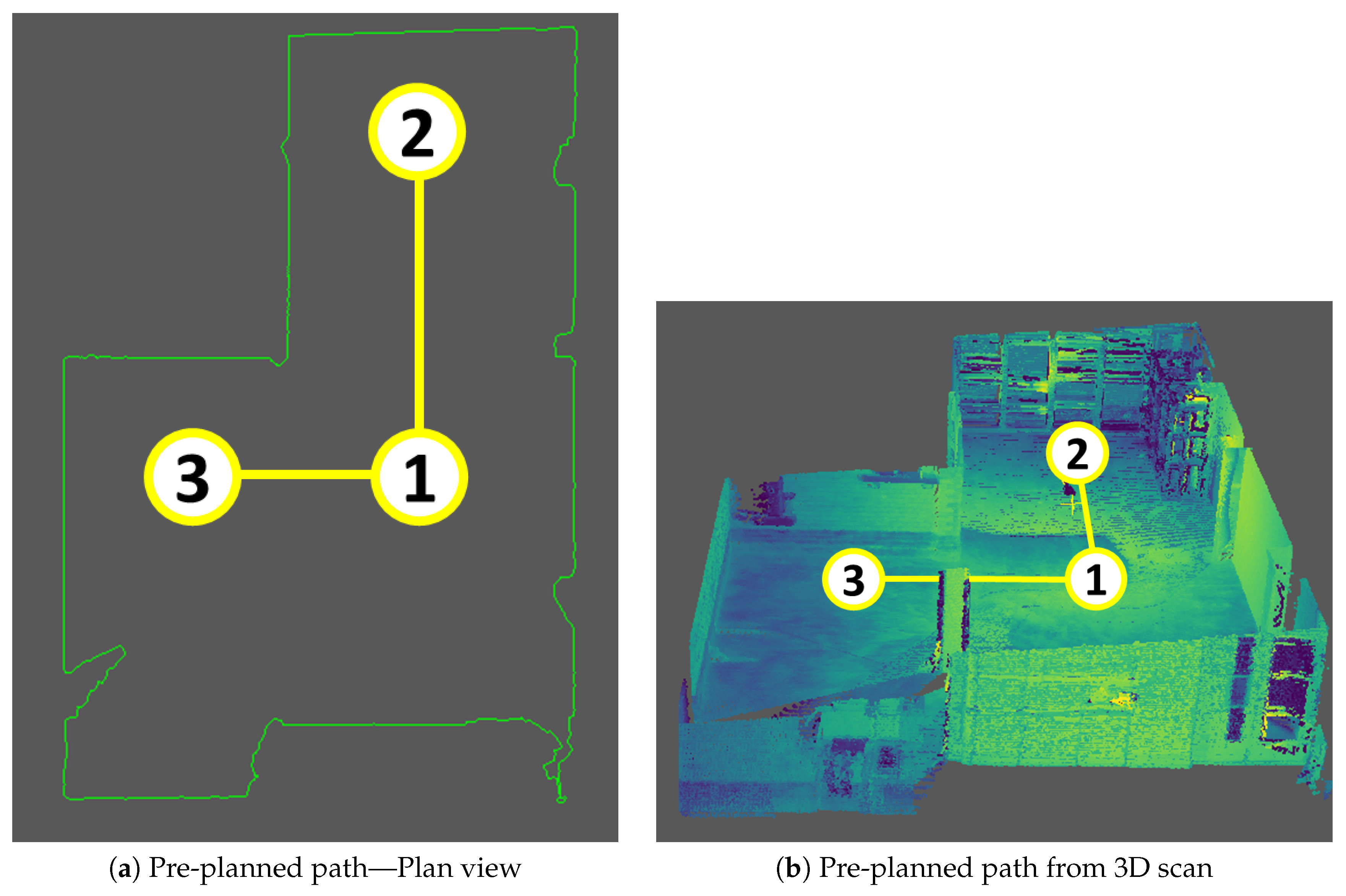
4.1.2. Autonomous Planning
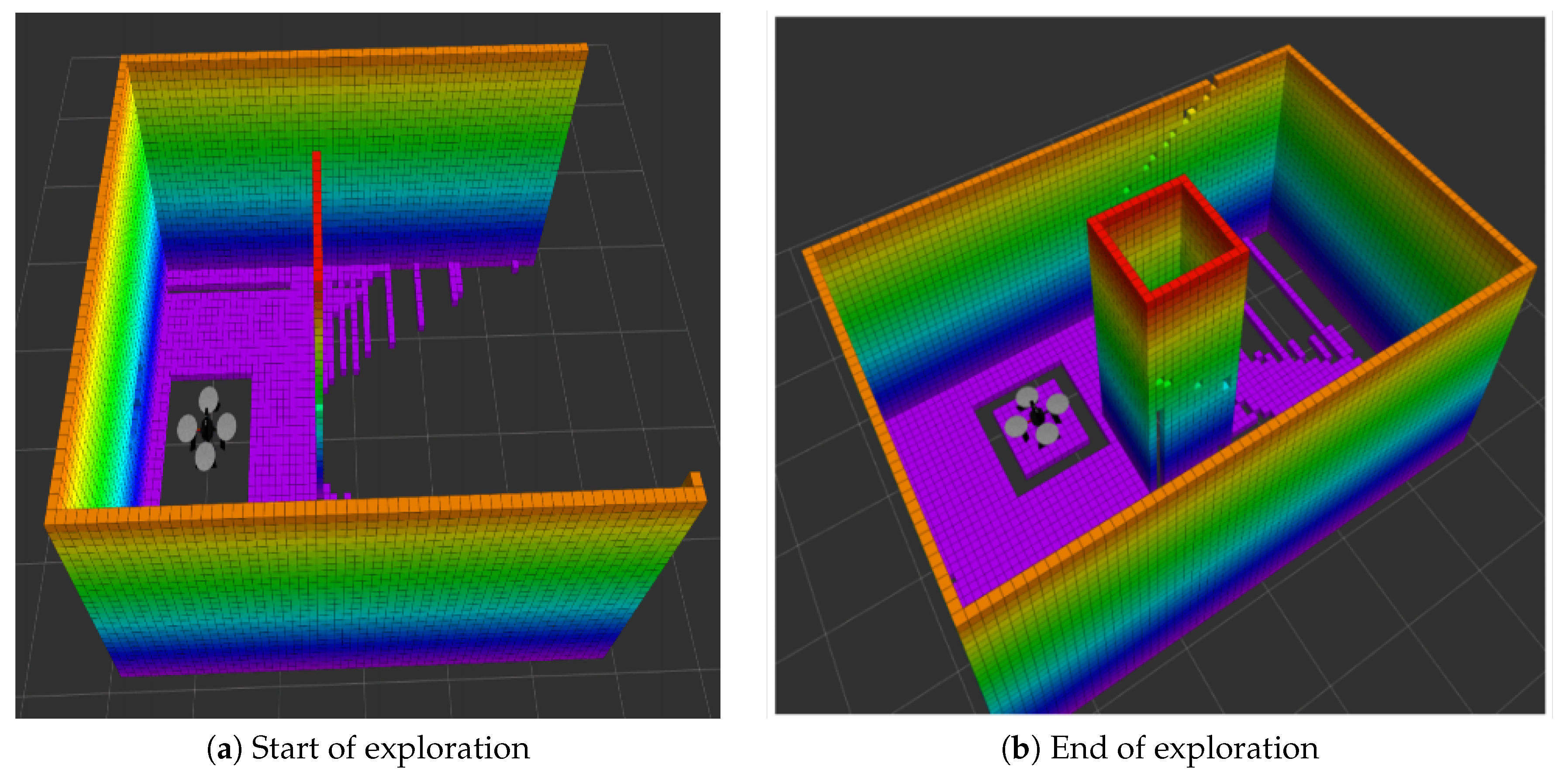
4.1.3. Autonomous Exploration and Planning Flight
4.2. Results and Discussion
4.2.1. Confined Flight
4.2.2. Autonomous Mission
4.2.3. Autonomous Exploration and Planning Flight
4.2.4. Discussion
- The robot was able to safely follow the pre-planned path in the confined environment, Video 1 shows small disturbances as the UAS was effected by ground effect but improved tuning of the flight controller should be able to reduce that effect.
- As shown by successfully completing a safe flight, the position feedback from the VICON system was able to be injected into the flight controller through the ROS framework. Demonstrating that this works when in a region without external position feedback, the position reference will be generated from the on-board SLAM system which is still in development.
- As shown in Video 1, the robot was able to safely and autonomously track the path. Future work would be the development of the path tracking to enable smoother transmissions between way points.
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Rail, N. Challenge Statement—Mining Ground Investigations. Technical Report. 2019. Available online: https://www.networkrail.co.uk/wp-content/uploads/2019/06/Mining-Mining-Ground-Investigations.pdf (accessed on 6 October 2020).
- GeoSLAM. ZEB Revo RT. Available online: https://geoslam.com/solutions/zeb-revo-rt/ (accessed on 19 May 2020).
- Australian Droid + Robot. Explora S Package––Australian Droid + Robot. Available online: https://www.australiandroid.com.au/collections/underground-inspection-mapping/products/explora-s-package (accessed on 6 October 2020).
- Nuchter, A.; Surmann, H.; Lingemann, K.; Hertzberg, J.; Thrun, S. 6D SLAM with an application in autonomous mine mapping. Int. Conf. Robot. Autom. 2004, 2, 1998–2003. [Google Scholar] [CrossRef]
- Morris, A.; Silver, D.; Ferguson, D.; Thayer, S. Towards topological exploration of abandoned mines. Proc. IEEE Int. Conf. Robot. Autom. 2005, 2005, 2117–2123. [Google Scholar] [CrossRef]
- OnyxStar. LIDAR Scanning-Aerial Laser Scanning by Drone. Available online: https://www.onyxstar.net/lidar-scanning-aerial-laser-scanning-by-drone/ (accessed on 6 October 2020).
- Castaño, A.R.; Romero, H.; Capitán, J.; Andrade, J.L.; Ollero, A. Development of a Semi-autonomous Aerial Vehicle for Sewerage Inspection. In Robot 2019: Fourth Iberian Robotics Conference; Silva, M.F., Luís Lima, J., Reis, L.P., Sanfeliu, A., Tardioli, D., Eds.; Springer International Publishing: Cham, The Netherlands, 2020; pp. 75–86. [Google Scholar]
- Nikolic, J.; Burri, M.; Rehder, J.; Leutenegger, S.; Huerzeler, C.; Siegwart, R. A UAV system for inspection of industrial facilities. IEEE Aeros.Conf. Proc. 2013. [Google Scholar] [CrossRef]
- Flyability. Elios 2-Indoor drone for confined space inspections. Available online: https://www.flyability.com/elios-2 (accessed on 13 November 2020).
- Flyability. Elios-Inspect & Explore Indoor and Confined Spaces. Available online: https://www.flyability.com/elios/ (accessed on 13 November 2020).
- Andrew Macdonald. Droneball The Collision Tolerant Drone | Indiegogo. Available online: https://www.indiegogo.com/projects/droneball-the-collision-tolerant-drone#/ (accessed on 13 November 2020).
- Australian Droid + Robot. Inspecta Mine Inspection Drone Package–Australian Droid + Robot. Available online: https://australiandroid.com/products/inspecta-mine-inspection-drone-package (accessed on 13 November 2020).
- INKONOVA. Available online: https://www.inkonova.se/ (accessed on 19 May 2020).
- Hovering Solutions. Flying Underground: The Use of Smart Flying Robots in Underground Mining. Available online: http://www.hoveringsolutions.com/es/casos-de-estudio/underground-mining-flying-robots (accessed on 19 May 2020).
- Exyn. Available online: https://www.exyn.com/mining/ (accessed on 18 May 2020).
- Go Pro. Karma with HERO6 Black. Available online: https://shop.gopro.com/EMEA/accessories-2/karma-with-hero6-black/QKWXX-601-EU.html (accessed on 8 May 2020).
- DJI. Mavic 2-the Flagship Consumer Drone from DJI. Available online: https://store.dji.com/product/mavic-2 (accessed on 8 May 2020).
- Falanga, D.; Kleber, K.; Mintchev, S.; Floreano, D.; Scaramuzza, D. The Foldable Drone: A Morphing Quadrotor That Can Squeeze and Fly. IEEE Robot. Autom. Lett. 2018, 4, 209–216. [Google Scholar] [CrossRef]
- Riviere, V.; Manecy, A.; Viollet, S. Agile Robotic Fliers: A Morphing-Based Approach. Soft Robot. 2018, 5, 541–553. [Google Scholar] [CrossRef] [PubMed]
- Desbiez, A.; Expert, F.; Boyron, M.; Diperi, J.; Viollet, S.; Ruffier, F.; Desbiez, A.; Expert, F.; Boyron, M.; Diperi, J.; et al. X-Morf: A crash-separable quadrotor that morfs its X-geometry in flight. In Proceedings of the 2017 Workshop on Research, Education and Development of Unmanned Aerial Systems (RED-UAS), Linkoping, Sweden, 3–5 October 2017. [Google Scholar]
- Bucki, N.; Mueller, M.W. Design and Control of a Passively Morphing Quadcopter. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019. [Google Scholar]
- Zhao, N.; Luo, Y.; Deng, H.; Shen, Y. The deformable quad-rotor: Design, kinematics and dynamics characterization, and flight performance validation. IEEE Int. Conf. Intell. Robot. Syst. 2017, 2391–2396. [Google Scholar] [CrossRef]
- Zhao, M.; Kawasaki, K.; Chen, X.; Noda, S.; Okada, K.; Inaba, M. Whole-body aerial manipulation by transformable multirotor with two-dimensional multilinks. Proc. IEEE Int. Conf. Robot. Autom. 2017, 5175–5182. [Google Scholar] [CrossRef]
- Zhao, M.; Anzai, T.; Shi, F.; Chen, X.; Okada, K.; Inaba, M. Design, Modeling, and Control of an Aerial Robot DRAGON: A Dual-Rotor-Embedded Multilink Robot with the Ability of Multi-Degree-of-Freedom Aerial Transformation. IEEE Robot. Autom. Lett. 2018, 3, 1176–1183. [Google Scholar] [CrossRef]
- Zheng, P.; Tan, X.; Kocer, B.B.; Yang, E.; Kovac, M. TiltDrone: A Fully-Actuated Tilting Quadrotor Platform. IEEE Robot. Autom. Lett. 2020, 5, 6845–6852. [Google Scholar] [CrossRef]
- Power Vision. PowerEgg-PowerVision|European. Available online: https://www.powervision.me/eu/product/poweregg (accessed on 13 November 2020).
- Lozano-Pérez, T. Spatial Planning: A Configuration Space Approach. In Autonomous Robot Vehicles; Springer: New York, NY, USA, 1990; pp. 259–271. [Google Scholar] [CrossRef]
- Quigley, M.; Gerkey, B.; Conley, K.; Faust, J.; Foote, T.; Leibs, J.; Berger, E.; Wheeler, R.; Ng, A. ROS: An Open-Source Robot Operating System; Technical Report; Willow Garage: Menlo Park, CA, USA, 2009. [Google Scholar]
- Akbari, A.; Chhabra, P.; Bhandari, U.; Bernardini, S. Intelligent Exploration and Autonomous Navigation in Confined Spaces. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020. [Google Scholar]
- VICON. Motion Capture Systems. Available online: https://www.vicon.com/about-us/ (accessed on 18 May 2020).


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
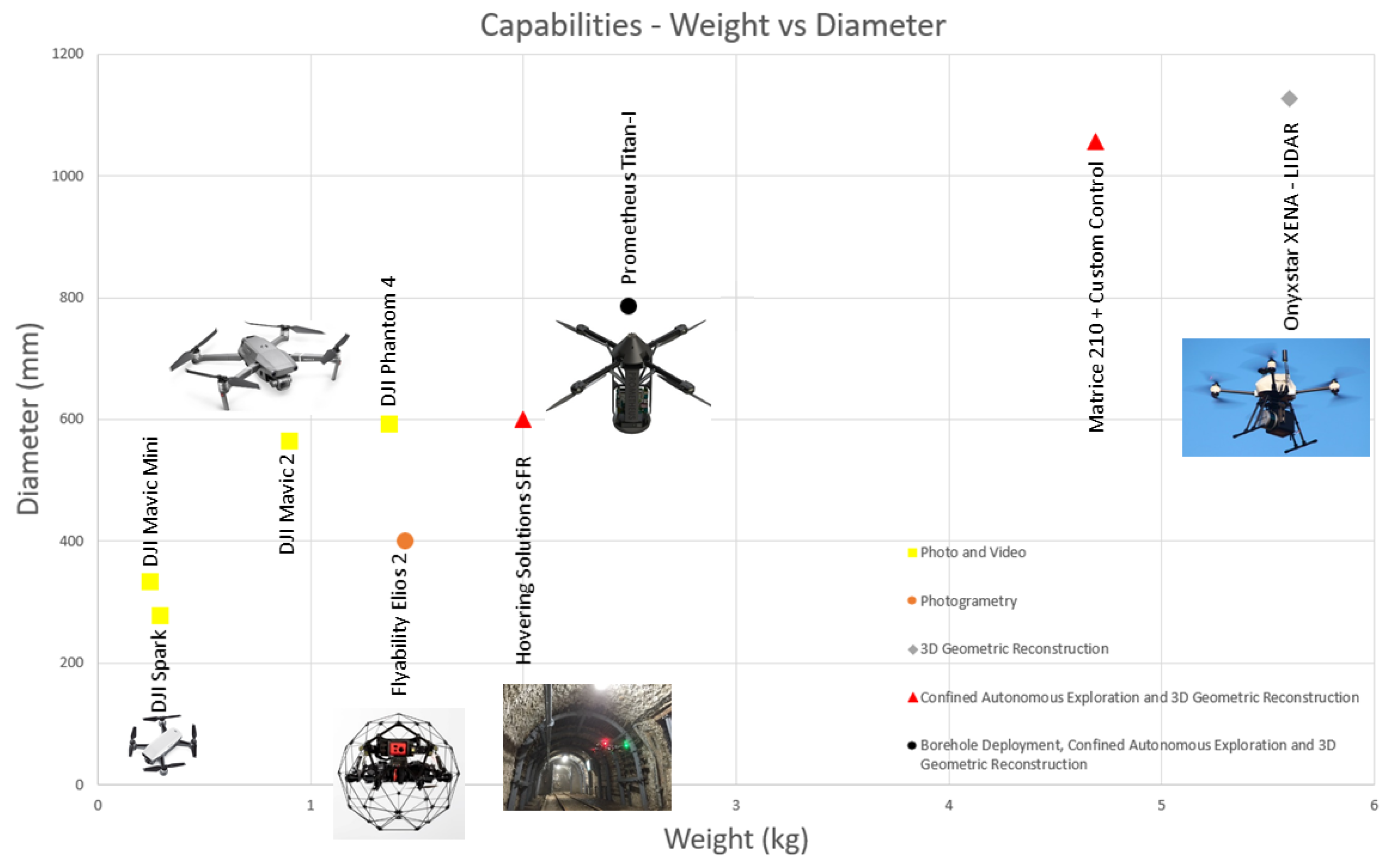
| Capability Matrix | Specification | Capabilities | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Nominal Weight | Tip to Tip Diameter | Flight Time | Photos | Video | Borehole Deployable | 3D Reconstruction | Confined Autonomous Flight | Autonomous Exploration | ||||
| Robot | kg | mm | mins | |||||||||
| 1 | Flyability | Elios 2 | 1.45 | 400 | 10 | Y | Y | N | Phgr | N | N | [9] |
| 2 | ADR | Inspecta | ? | ? | 20 | Y | Y | N | Y | N | N | [12] |
| 3 | Hovering Solutions | Smart Flying Robot | 2 | 600 | 20 | Y | Y | N | Y | Y | Y | [14] |
| 4 | Inkonova | Tilt Scout Tilt Ranger | ? | ? | 15 | ? | ? | N | Y | Y | Y | [13] |
| 5 | Exyn | A3R | ? | 1056.8 | ? | ? | ? | N | Y | Y | Y | [15] |
| 6 | Castano et al. | F450 | ? | 704 | ? | Y | Y | N | N | Y | N | [7] |
| 7 | Prometheus | Titan-I | 2.5 | 784.8 | 10 | N | N | Y | Y | Y | Y | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Brown, L.; Clarke, R.; Akbari, A.; Bhandari, U.; Bernardini, S.; Chhabra, P.; Marjanovic, O.; Richardson, T.; Watson, S. The Design of Prometheus: A Reconfigurable UAV for Subterranean Mine Inspection. Robotics 2020, 9, 95. https://doi.org/10.3390/robotics9040095
Brown L, Clarke R, Akbari A, Bhandari U, Bernardini S, Chhabra P, Marjanovic O, Richardson T, Watson S. The Design of Prometheus: A Reconfigurable UAV for Subterranean Mine Inspection. Robotics. 2020; 9(4):95. https://doi.org/10.3390/robotics9040095
Chicago/Turabian StyleBrown, Liam, Robert Clarke, Ali Akbari, Ujjar Bhandari, Sara Bernardini, Puneet Chhabra, Ognjen Marjanovic, Thomas Richardson, and Simon Watson. 2020. "The Design of Prometheus: A Reconfigurable UAV for Subterranean Mine Inspection" Robotics 9, no. 4: 95. https://doi.org/10.3390/robotics9040095
APA StyleBrown, L., Clarke, R., Akbari, A., Bhandari, U., Bernardini, S., Chhabra, P., Marjanovic, O., Richardson, T., & Watson, S. (2020). The Design of Prometheus: A Reconfigurable UAV for Subterranean Mine Inspection. Robotics, 9(4), 95. https://doi.org/10.3390/robotics9040095