An Architecture for the Integration of Robots and Sensors for the Care of the Elderly in an Ambient Assisted Living Environment

 , and
, and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Technologies Related to Smart Environments
3. Concept of the Proposed System
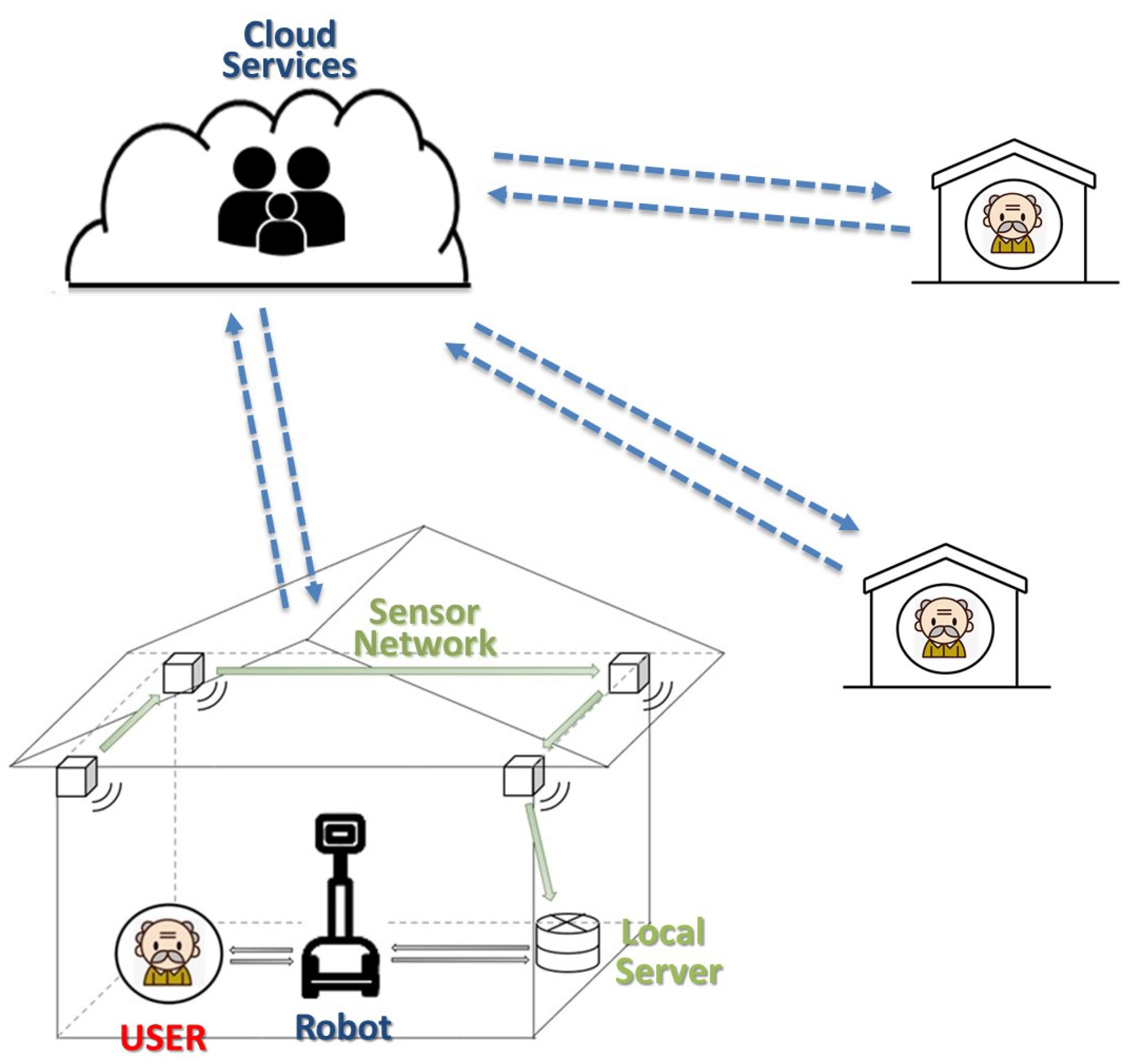
3.1. Initial Idea
3.2. General Structure of the System
4. Sensors and Actuators Network
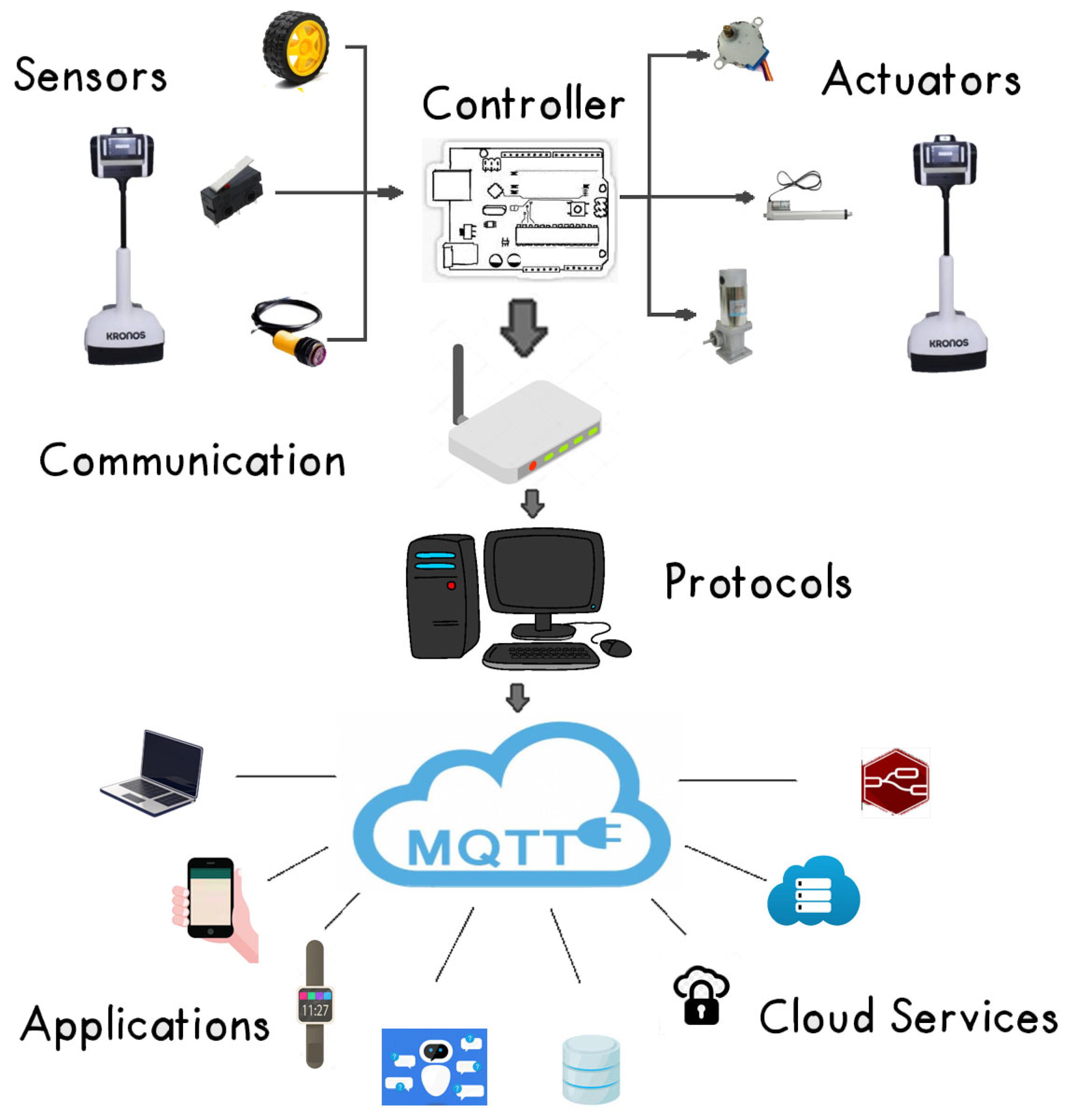
4.1. Network Design
- Devices: This section shows the different sensors and actuators that are part of the IoT network proposed for the AAL that includes: control of lights, blinds, door opening, and temperature.
- Communication: For communication between devices it is important to define the network and protocol to be used, in this case, the implementation of the MQTT protocol that works with the WiFi wireless network under port 1883 is proposed.
- Cloud services: The services provided by the cloud and that will be used for the implementation will be oriented to the management of the information acquired by the sensors through storage and database.
- Applications: Are those that allow direct contact with the end-user. That is why among the applications of visualization NodeRed is used, which will allow the control and monitoring of the devices, as well as a chatbot created in Dialog Flow for the interaction of people with a virtual avatar projected on the holographic pyramid.
4.2. Comunication
5. Hardware
5.1. Interactive System-Holographic Pyramid
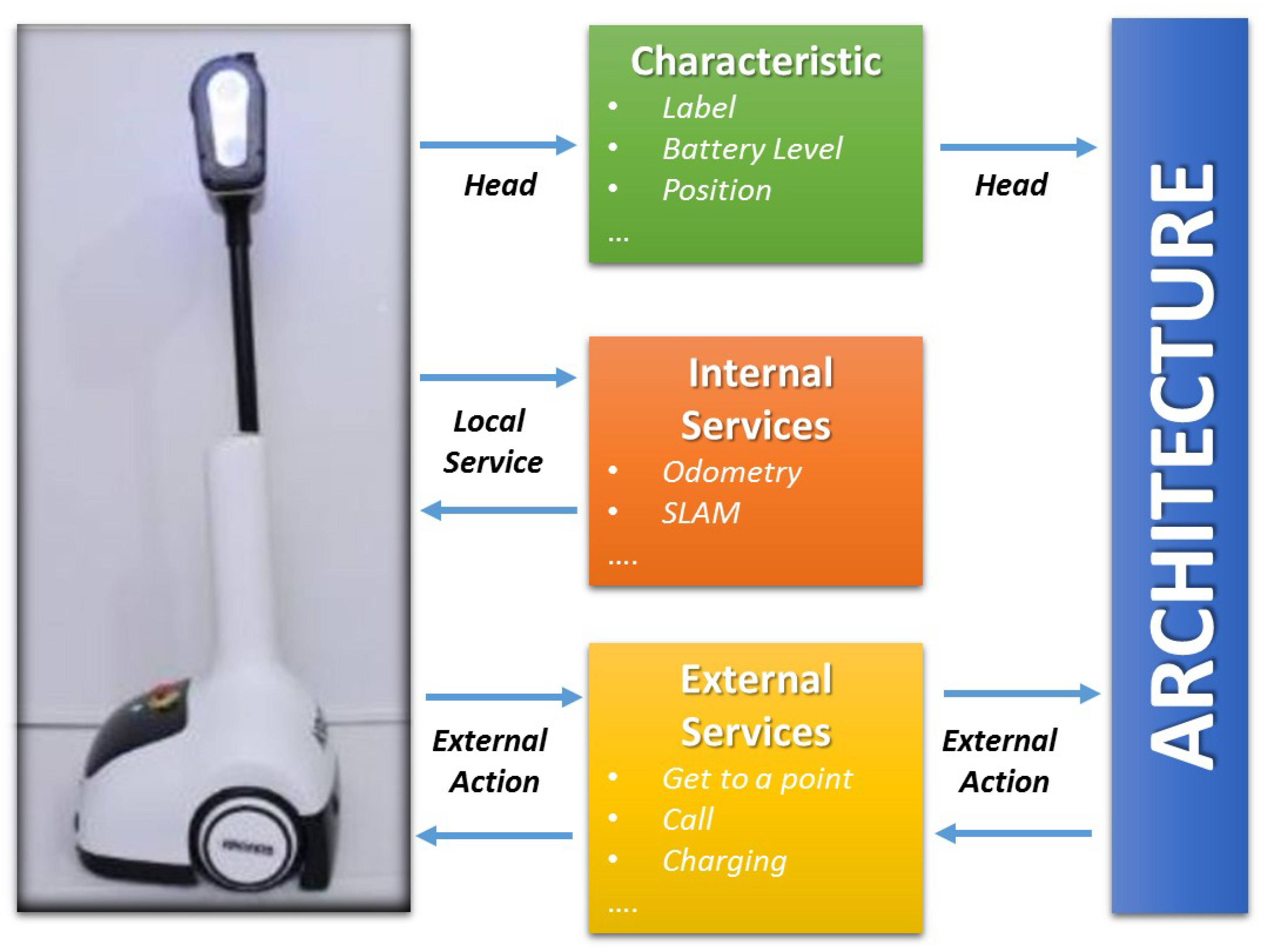
5.2. Telepresence Robot
5.3. Biometric Bracelet
6. Software
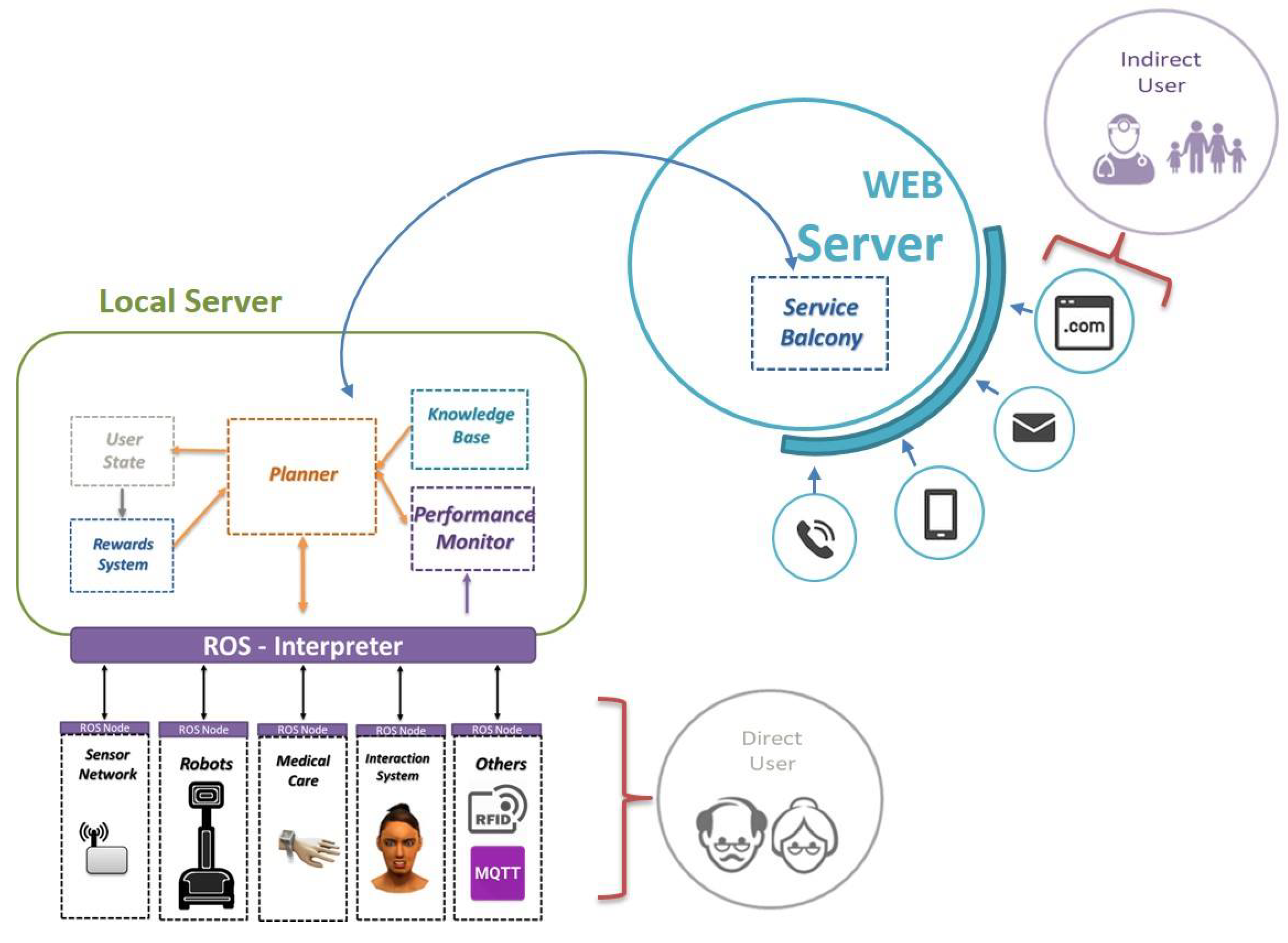
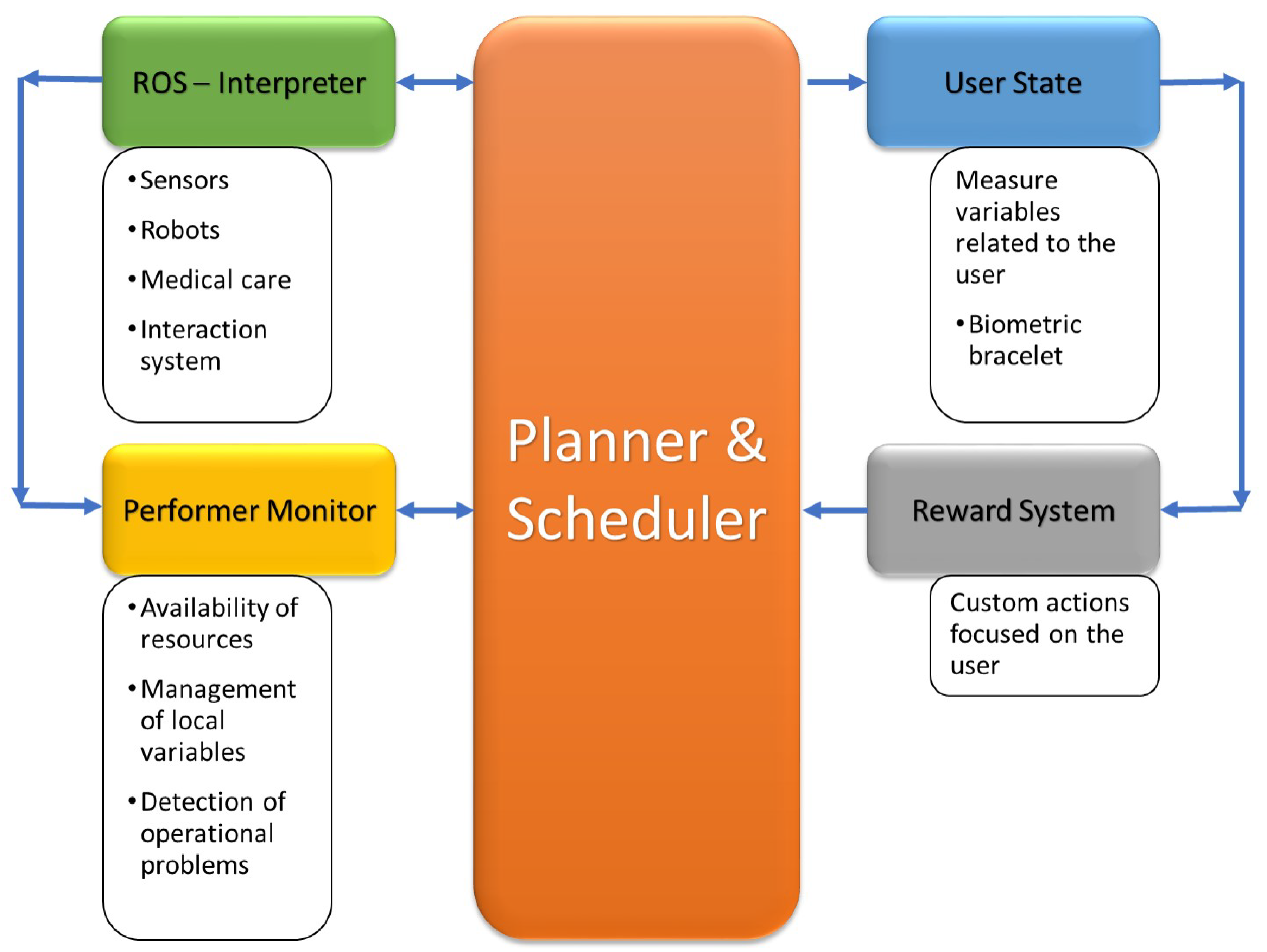
6.1. Local Server
6.1.1. ROS-Interpreter
6.1.2. The Planner
6.1.3. The Performance Monitor
6.1.4. The Knowledge Base
6.1.5. User Status
6.1.6. The Reward System
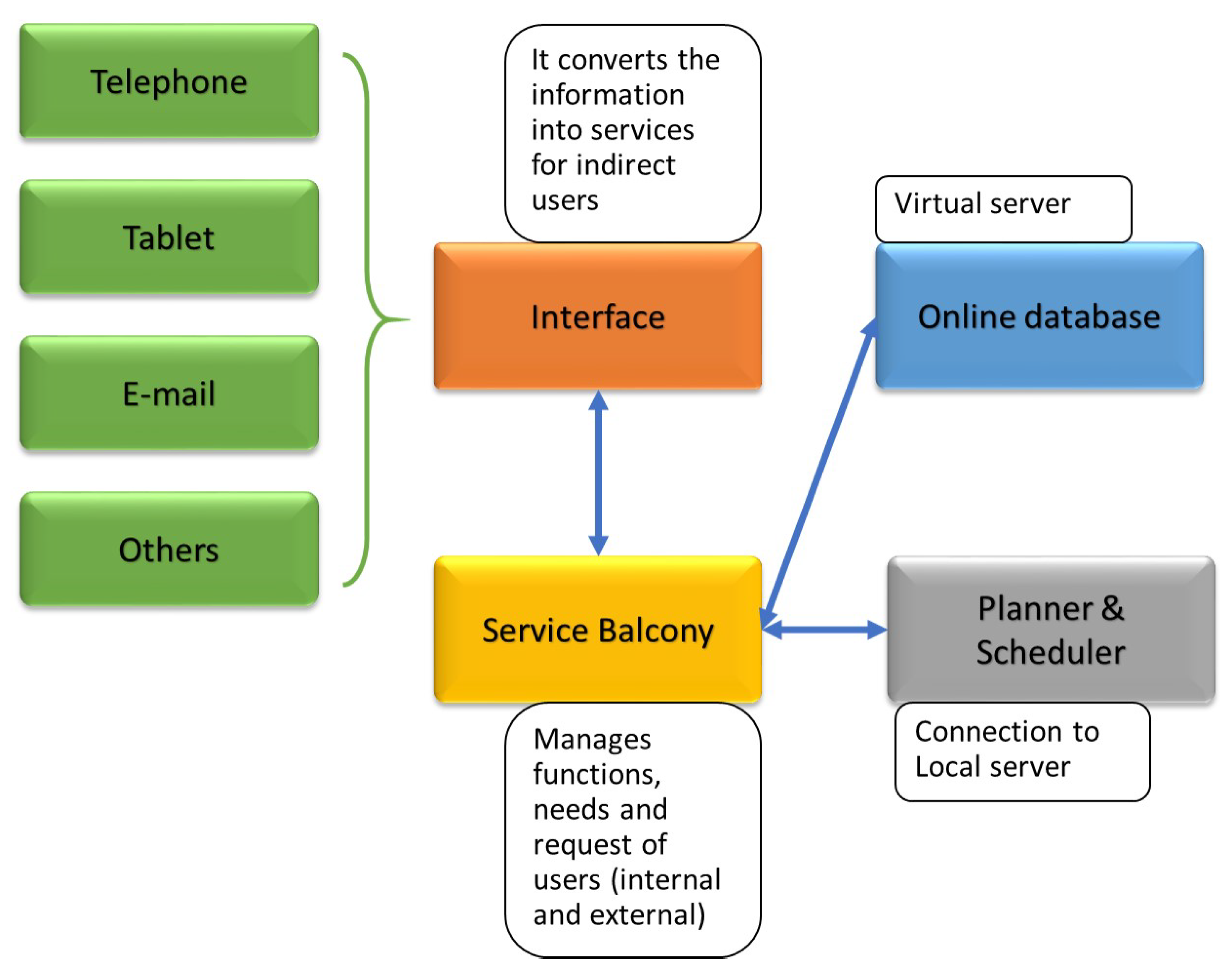
6.2. Web Server
7. System Operation
- It starts when the senior citizen (direct user) interacts with the projection pyramid, which is the main interaction system in the architecture. The pyramid is managed through verbal communication and is allocated in a local server that provides the system greater fluidity for operation.
- In a regular scenario, the interaction would begin with basic questions such as time, date and weather information; then continues with more specific questions such as information about medication, schedules, prompts (visits of relatives, medical appointments, consultations), recommendations (drink water, walk and rest often, sleep at prudent times). If the user suffers from hearing impairment, the option of subtitles or other simpler means of communication can be enabled, such as the use of easy-to-remember figures and symbols, in order to give the elderly a sense of autonomy and independence, which is what he/she often need and miss.
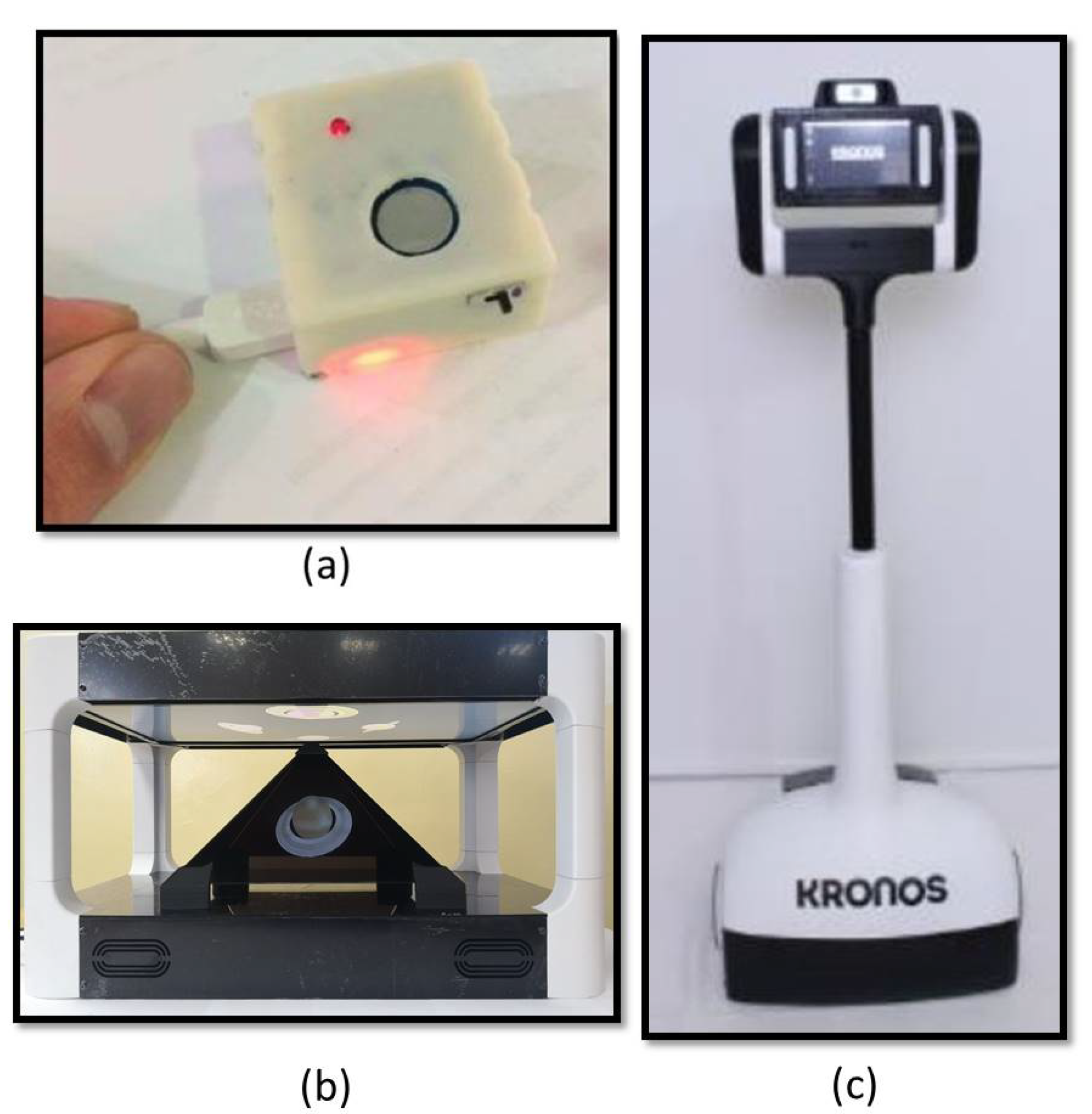
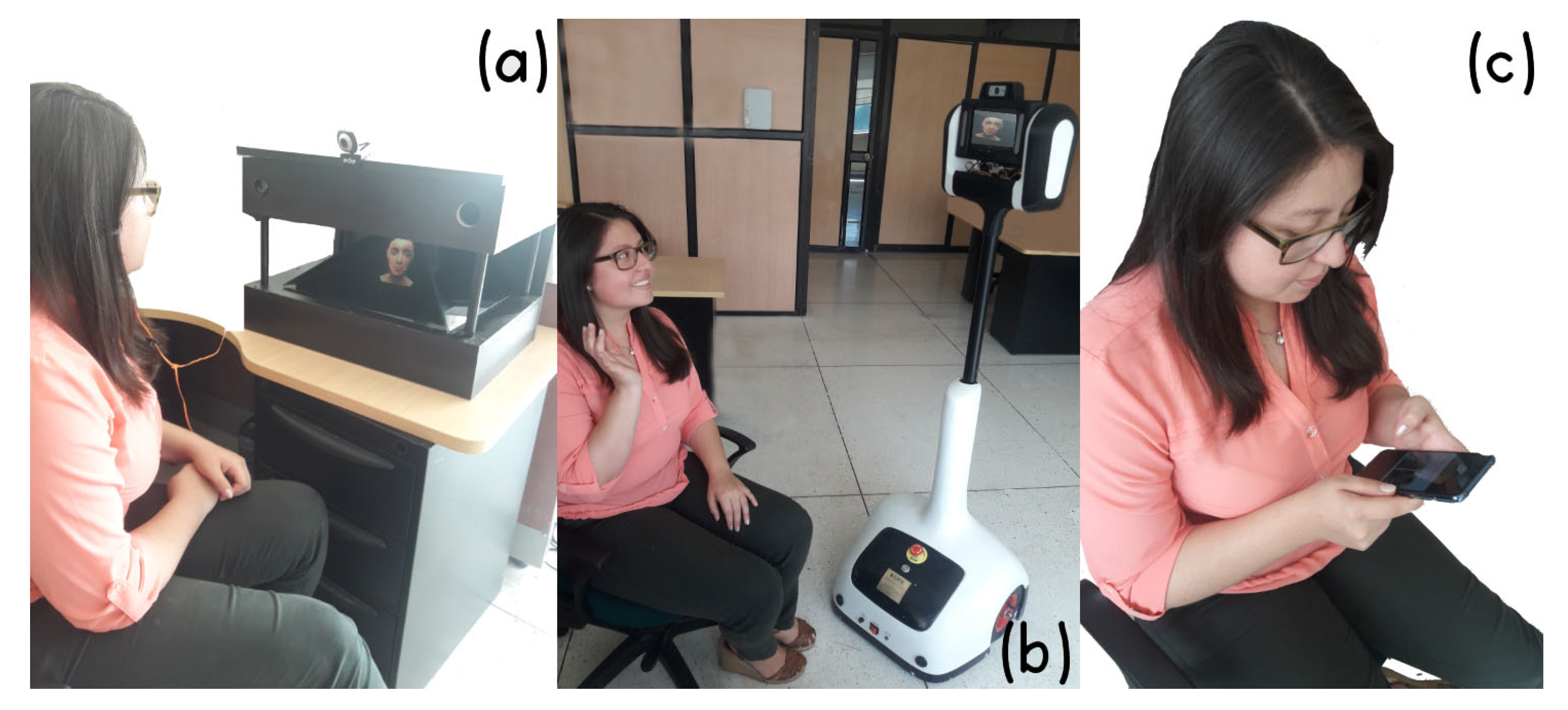
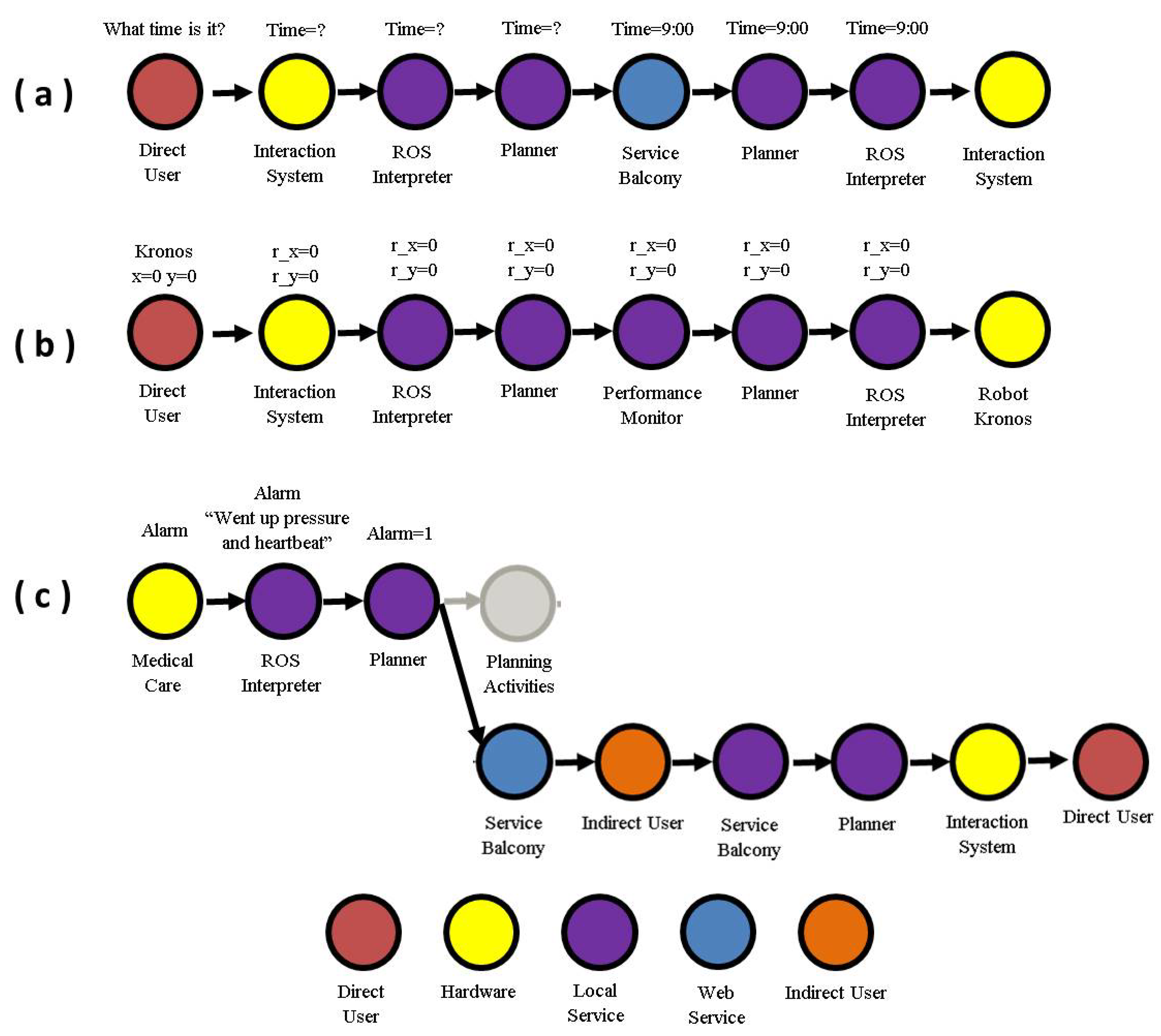
- In Figure 8a it can be observed that a user is interacting with the pyramid conversationally. She just asked the time because she needs medication for her legs discomfort and is following a pain therapy that consists on doing a small walk of 2 min in her room every 20 min, between 9 and 11 AM, which the pyramid has the responsibility to inform.
- In this stage, simple conversational communication that the user had with the pyramid is left and the system starts to carry out direct actions and requests such as turning on lights, movement of the telepresence robot for objects manipulation, control and monitoring of other devices, etc. It is a great help for users who had mobility impairments or users who need to rest with limited movement. The robot can be placed within the environment, so it can locate the user at all times if it requires it.
- Once the action between the user and the pyramid has been validated, the state of the other devices needed for the plan is updated. If there is any conflict with the required action, a replanning occurs; in case the action is not possible the user is informed. If there is a major problem like a health risk, an update can be sent directly to a web server, which can send notifications directly to emergency or close relatives of the senior citizen.
- In Figure 8b it can be seen that the user performed the action of calling the telepresence robot. Due to impairment by strong pain in her legs when she was going to pick up her medicines, which did not allow her to get up, she requested help from the pyramid to call the telepresence robot and bring her said medicines.
- This stage allows the use of some additional features of the webserver, such as video-call, telemedicine, etc. to be integrated into previous services.
- The local server is connected to a web server, which not only serves as a backup of the user’s status information but also provides access tools for real-time monitoring and the external operation (indirect user) of the environment in which the user is. The indirect user can be a family member or a personal physician since the system can detect a health problem through sensors integrated into the wristband. This data is updated in the user state module.
- Continuing with the example, in Figure 8c it can be observed the user personal physician looking with surprise at the cell phone when receiving a notification of the patient vital signs. Apparently, her pressure went up and her heartbeat was unusual. The physician immediately contacted the user through the projection pyramid. The user informed that the pain did not stop and she had already taken the pills as she had been instructed. Fortunately, she received immediate attention from the doctor and there were no unfortunate side effects.
Discussion
8. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| IoT | Internet of Things |
| RFID | Radio-frequency identification |
| WiFi | Wireless Fidelity |
| MQTT | Message Queuing Telemetry Transport |
References
- OMS. Informe Mundial Sobre el Envejecimiento y la Salud; Technical Report; OMS: Geneva, Switzerland, 2015. [Google Scholar]
- Montenegro, C.; López Zorrilla, A.; Mikel Olaso, J.; Santana, R.; Justo, R.; Lozano, J.A.; Torres, M.I. A Dialogue-Act Taxonomy for a Virtual Coach Designed to Improve the Life of Elderly. Multimodal Technol. Interact. 2019, 3, 52. [Google Scholar] [CrossRef]
- Frontoni, E.; Pollini, R.; Russo, P.; Zingaretti, P.; Cerri, G. HDOMO: Smart Sensor Integration for an Active and Independent Longevity of the Elderly. Sensors 2017, 17, 2610. [Google Scholar] [CrossRef] [PubMed]
- Grguric, A.; Mošmondor, M.; Huljenić, D. The SmartHabits: An Intelligent Privacy-Aware Home Care Assistance System. Sensors 2019, 19, 907. [Google Scholar] [CrossRef] [PubMed]
- Shiarlis, K.; Messias, J.; van Someren, M.; Whiteson, S.; Kim, J.; Vroon, J.H.; Englebienne, G.; Truong, K.; Pérez-Higueras, N.; Pérez-Hurtado, I.; et al. TERESA: A socially intelligent semi-autonomous telepresence system. In Proceedings of the Workshop on Machine Learning for Social Robotics, Seattle, DC, USA, 26 May 2015. [Google Scholar]
- Recupero, R.D.; Gangemi, A.; Nolfi, S.; Nuzzolese, A.; Presutti, V.; Raciti, M.; Messervey, T.; Casey, D.; Dupourque, I.; Pegman, G.; et al. MARIO: Managing Active and Healthy Aging with Use of Caring servIce Robots; EU Project Networking at ESWC: Portoroz, Slovenia, 2015. [Google Scholar]
- Antonopoulos, C.; Keramidas, G.; Voros, N.; Huebner, M.; Schwiegelshohn, F.; Goehringer, D.; Dagioglou, M.; Stavrinos, G.; Konstantopoulos, S.; Karkaletsis, V. Robots in Assisted Living Environments as an Unobtrusive, Efficient, Reliable and Modular Solution for Independent Ageing: The RADIO Experience. In Proceedings of the 14th International Symposium on Applied Reconfigurable Computing (ARC 2018), Santorini Island, Greece, 2–4 May 2018; pp. 712–723. [Google Scholar] [CrossRef]
- Jaschinski, C.; Ben Allouch, S. Ambient Assisted Living: Benefits and Barriers from a User-Centered Perspective. In Proceedings of the Fourth International Conference on Ambient Computing, Applications, Services and Technologies, Rome, Italy, 24–28 August 2014; pp. 56–64. [Google Scholar]
- Van Kemenade, M.A.M.; Hoorn, J.F.; Konijn, E.A. Do You Care for Robots That Care? Exploring the Opinions of Vocational Care Students on the Use of Healthcare Robots. Robotics 2019, 8, 22. [Google Scholar] [CrossRef]
- Shi, W. A Survey on Assistive Technologies for Elderly and Disabled People. J. Mechatron. 2015, 3, 121–125. [Google Scholar] [CrossRef]
- Ohta, S.; Nakamoto, H.; Shinagawa, Y.; Tanikawa, T. A Health Monitoring System for Elderly People Living Alone. J. Telemed. Telecare 2002, 8, 151–156. [Google Scholar] [CrossRef] [PubMed]
- Inoue, K.; Wada, K.; Uehara, R. How Effective Is Robot Therapy?: PARO and People with Dementia. In Proceedings of the 5th European Conference of the International Federation for Medical and Biological Engineering, Budapest, Hungary, 14–18 September 2011. [Google Scholar]
- Coradeschi, S.; Cesta, A.; Cortellessa, G.; Coraci, L.; Galindo, C.; Gonzalez, J.; Karlsson, L.; Forsberg, A.; Frennert, S.; Furfari, F.; et al. GiraffPlus: A System for Monitoring Activities and Physiological Parameters and Promoting Social Interaction for Elderly. In Human-Computer Systems Interaction: Backgrounds and Applications 3; Hippe, Z.S., Kulikowski, J.L., Mroczek, T., Wtorek, J., Eds.; Springer International Publishing: Cham, Switzerland, 2014; pp. 261–271. [Google Scholar] [CrossRef]
- iRobot. Cambie la Forma de Limpiar Para Siempre. 2018. Available online: www.irobot.es/robots-domesticos/aspiracion (accessed on 30 August 2019).
- Moley—Robotic Kitchen. Future is Served Moley Robotics. 2018. Available online: www.moley.com (accessed on 30 August 2019).
- Robot Care Systems. Lea Care. 2018. Available online: www.robotcaresystems.com/lea-care/ (accessed on 30 August 2019).
- Fink, J.; Bauwens, V.; Mubin, O.; Kaplan, F.; Dillenbourg, P. People’s Perception of Domestic Service Robots: Same Household, Same Opinion? Social Robotics; Mutlu, B., Bartneck, C., Ham, J., Evers, V., Kanda, T., Eds.; Springer: Berlin/Heidelberg, Germany, 2011; pp. 204–213. [Google Scholar]
- Young, J.E.; Hawkins, R.; Sharlin, E.; Igarashi, T. Toward Acceptable Domestic Robots: Applying Insights from Social Psychology. Int. J. Soc. Robot. 2008, 1, 95. [Google Scholar] [CrossRef]
- Torta, E.; Werner, F.; Johnson, D.O.; Juola, J.F.; Cuijpers, R.H.; Bazzani, M.; Oberzaucher, J.; Lemberger, J.; Lewy, H.; Bregman, J. Evaluation of a Small Socially-Assistive Humanoid Robot in Intelligent Homes for the Care of the Elderly. J. Intell. Robot. Syst. 2014, 76, 57–71. [Google Scholar] [CrossRef]
- MQTT. MQTT org. 2018. Available online: http://mqtt.org/ (accessed on 30 August 2019).
- Loza, D.; Marcos, S.; Zalama, E.; García-Bermejo, J.G. Interaction System Based on an Avatar Projected on a Pyramidal Display. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2018, Madrid, Spain, 1–5 October 2018; pp. 3943–3948. [Google Scholar] [CrossRef]
- ROS. 2018. Available online: http://www.ros.org/ (accessed on 30 August 2019).
- Medina, S.; Córdova, F. Diseño y Construcción del Prototipo de Robot Móvil para Telepresencia Controlado a Través de Internet; Technical Report; Universidad de las Fuerzas Armadas—ESPE: Sangolquí, ON, Ecuador, 2018. [Google Scholar]
- Viola, P.; Jones, M.J. Robust Real-Time Face Detection. Int. J. Comput. Vision 2004, 57, 137–154. [Google Scholar] [CrossRef]
- openHAB. openHAB Empowering the Smart Home. 2018. Available online: https://www.openhab.org/ (accessed on 30 August 2019).
- Aguilar, R.; Ortí, C. Diseño e Implementación de un Sistema robóTico de Monitoreo e Interpretación de Signos Vitales de Personas de Edad Avanzadas Basado en Openhab; Technical Report; Universidad de las Fuerzas Armadas—ESPE: Sangolquí, ON, Ecuador, 2017. [Google Scholar]
- Kaelbling, L.P.; Littman, M.L.; Cassandra, A.R. Planning and Acting in Partially Observable Stochastic Domains. Artif. Intell. 1998, 101, 99–134. [Google Scholar] [CrossRef]









© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Loza-Matovelle, D.; Verdugo, A.; Zalama, E.; Gómez-García-Bermejo, J. An Architecture for the Integration of Robots and Sensors for the Care of the Elderly in an Ambient Assisted Living Environment. Robotics 2019, 8, 76. https://doi.org/10.3390/robotics8030076
Loza-Matovelle D, Verdugo A, Zalama E, Gómez-García-Bermejo J. An Architecture for the Integration of Robots and Sensors for the Care of the Elderly in an Ambient Assisted Living Environment. Robotics. 2019; 8(3):76. https://doi.org/10.3390/robotics8030076
Chicago/Turabian StyleLoza-Matovelle, David, Alexandra Verdugo, Eduardo Zalama, and Jaime Gómez-García-Bermejo. 2019. "An Architecture for the Integration of Robots and Sensors for the Care of the Elderly in an Ambient Assisted Living Environment" Robotics 8, no. 3: 76. https://doi.org/10.3390/robotics8030076
APA StyleLoza-Matovelle, D., Verdugo, A., Zalama, E., & Gómez-García-Bermejo, J. (2019). An Architecture for the Integration of Robots and Sensors for the Care of the Elderly in an Ambient Assisted Living Environment. Robotics, 8(3), 76. https://doi.org/10.3390/robotics8030076