Inverse Kinematics with a Geometrical Approximation for Multi-Segment Flexible Curvilinear Robots



Abstract
1. Introduction
2. WDM’s Inverse Kinematics with the Robotics Toolbox
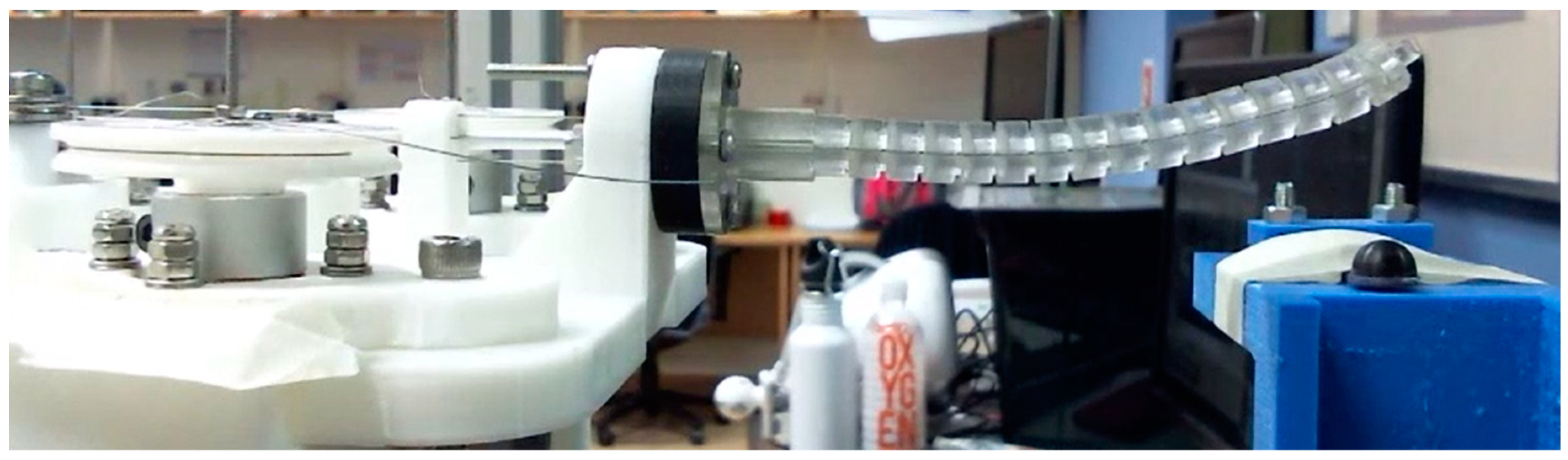
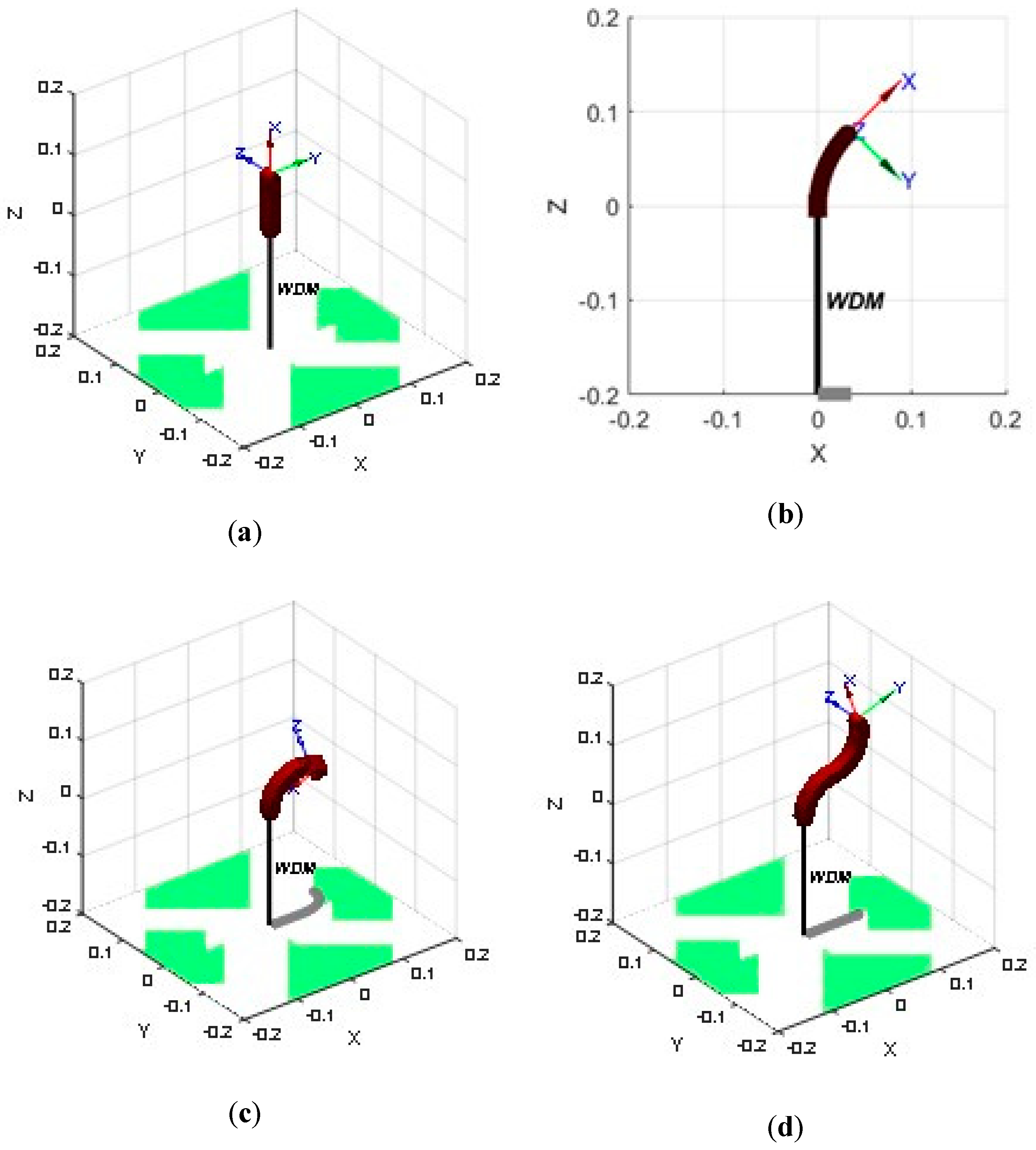
2.1. Review of the WDM
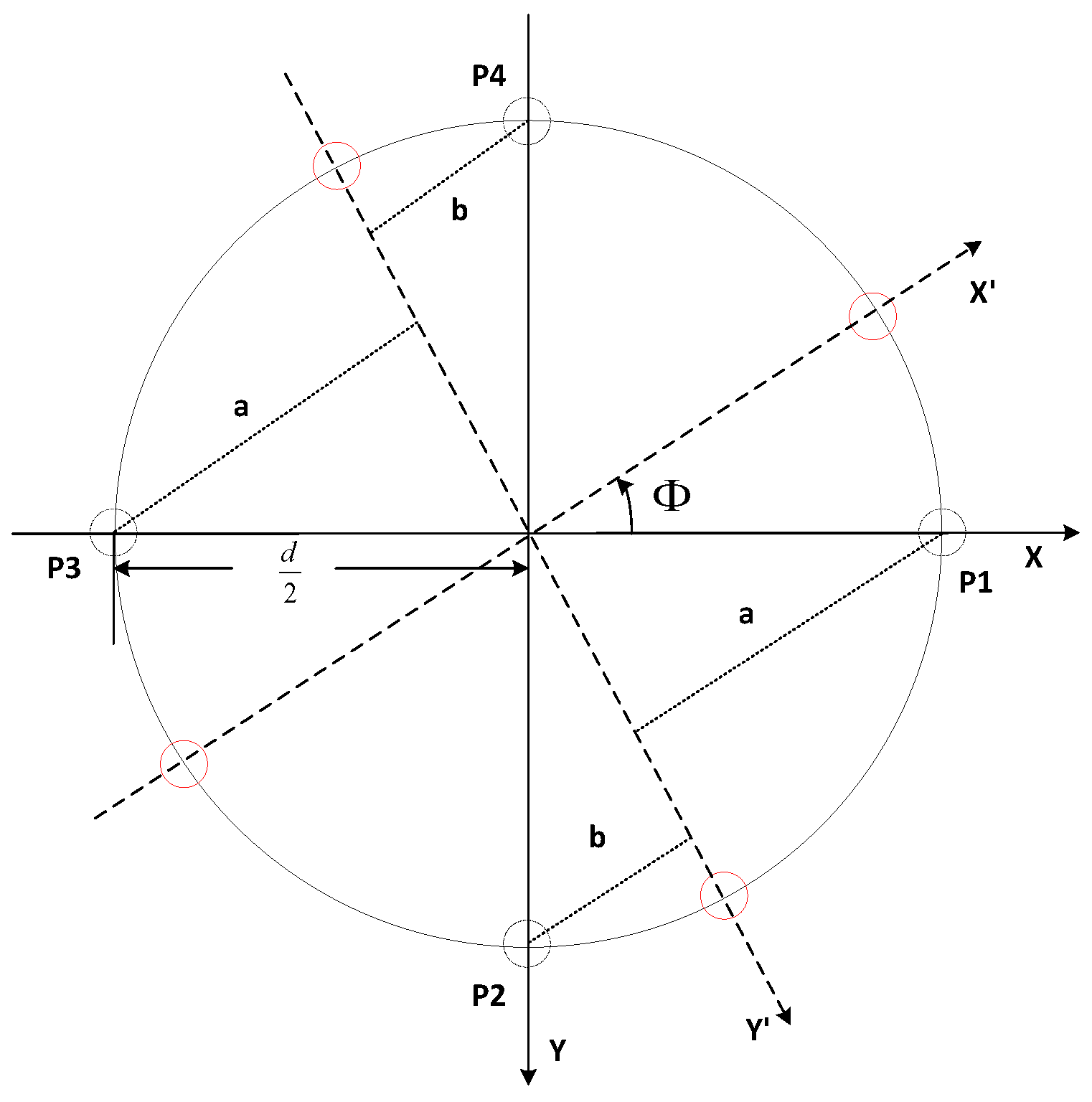
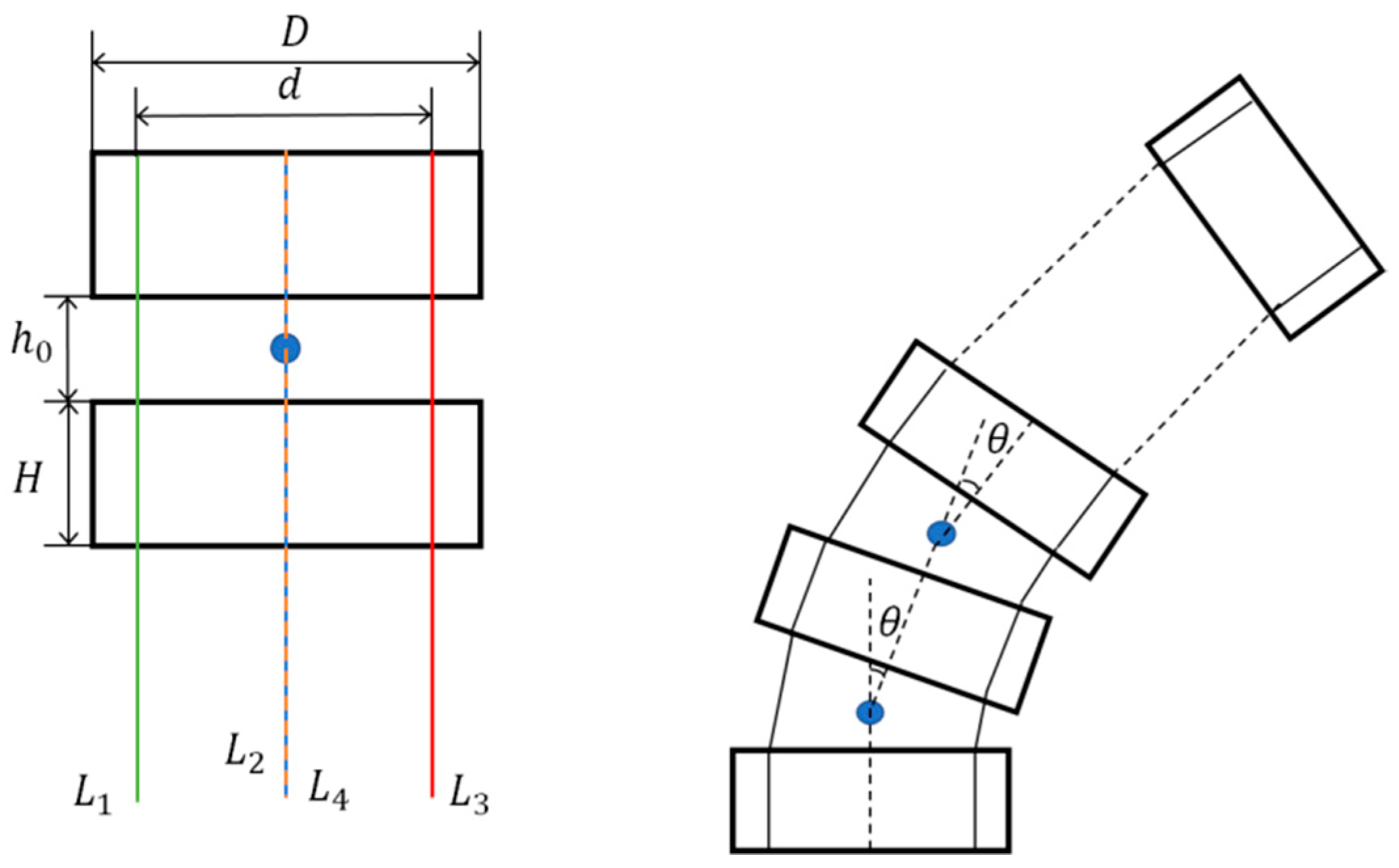
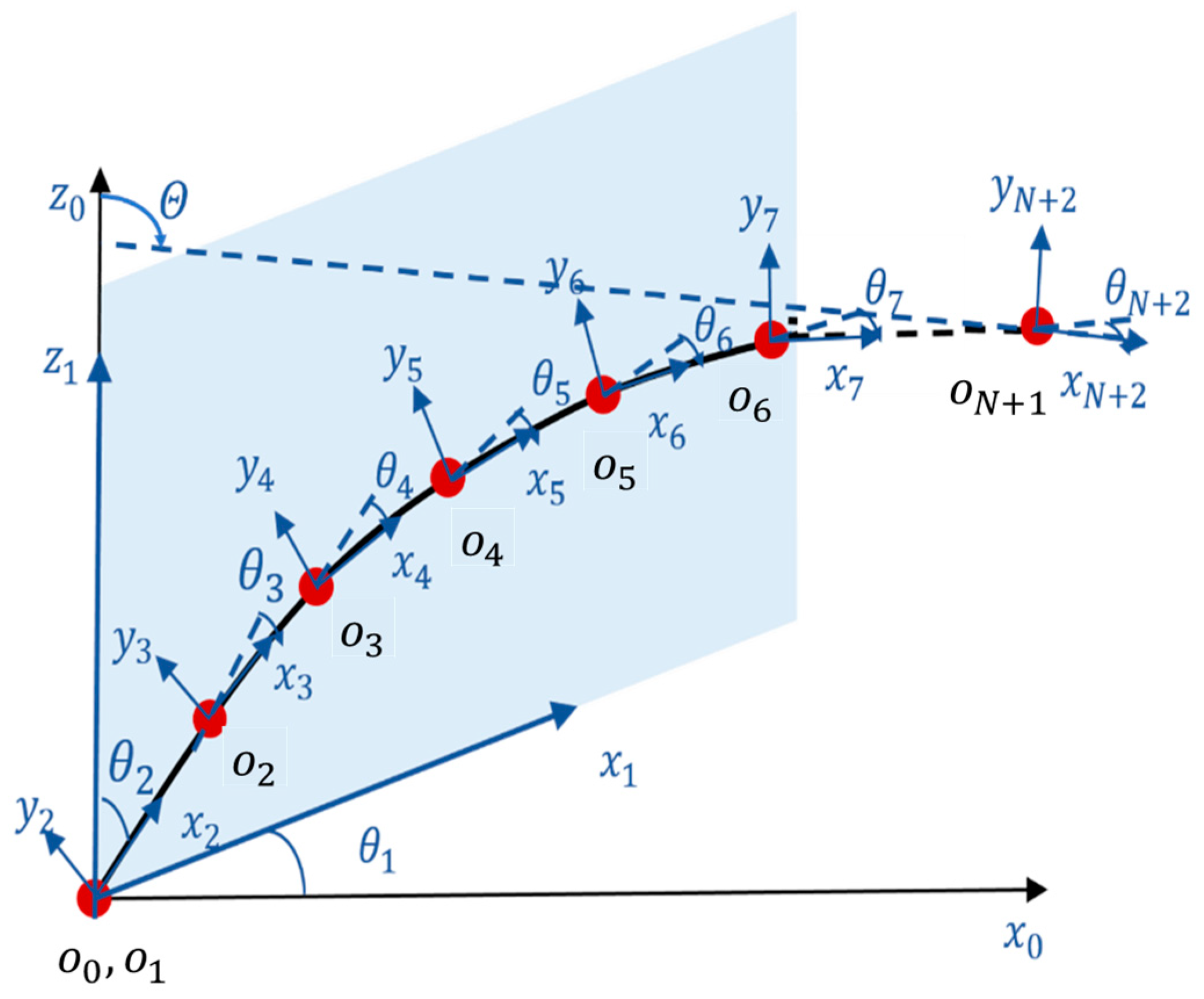
2.2. Denavit–Hartenberg Parameters of the WDM
2.3. Robotics Toolbox for the WDM
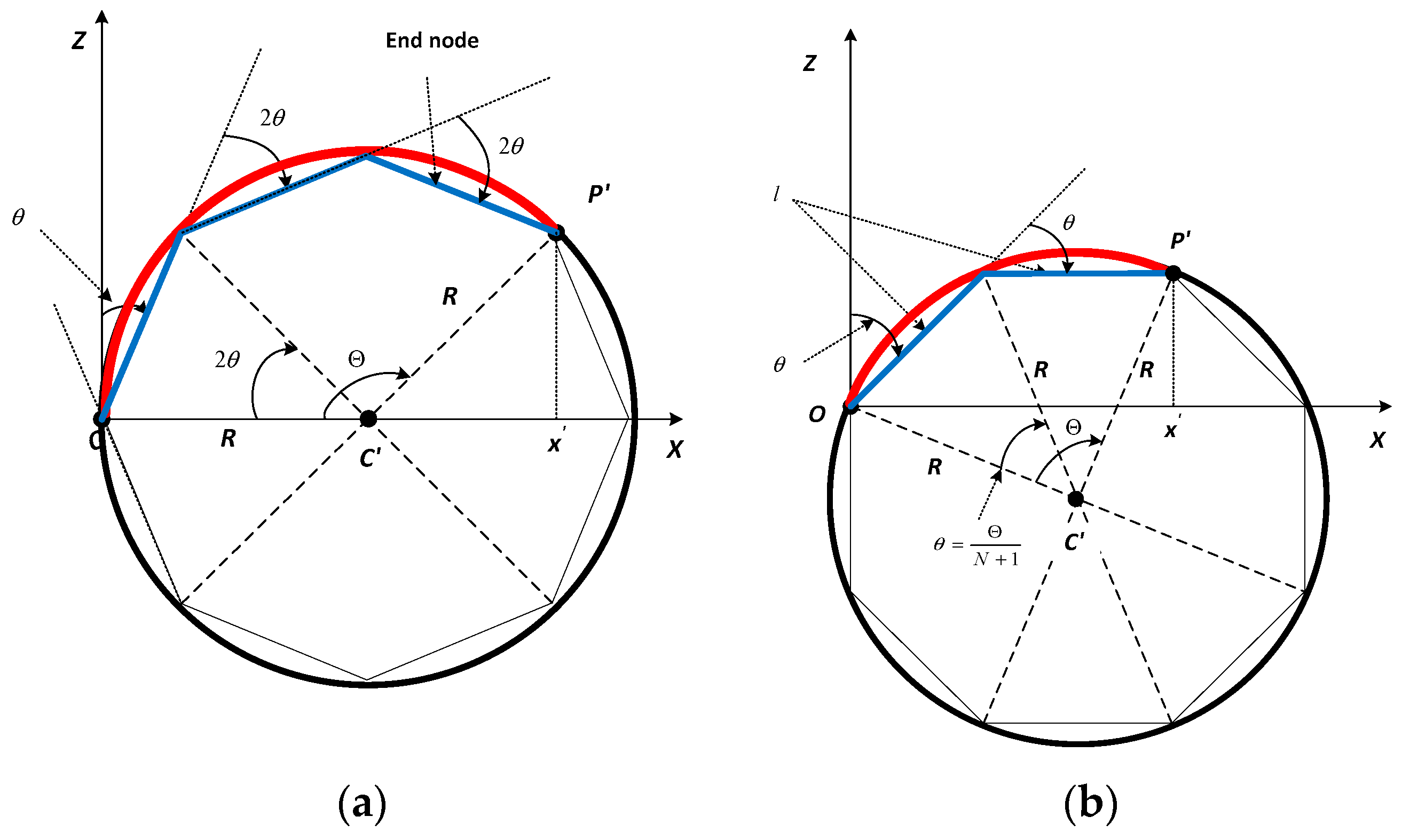
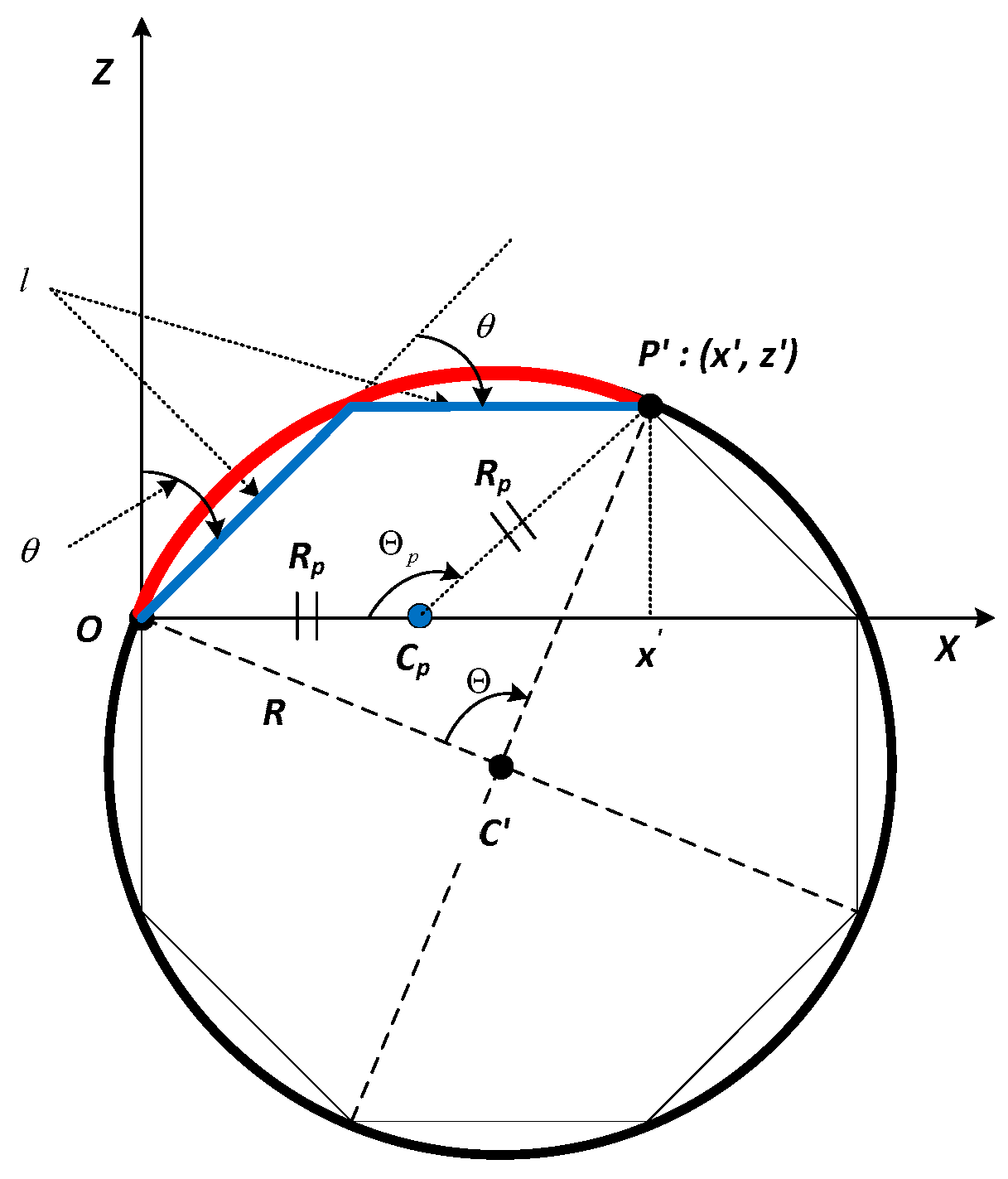
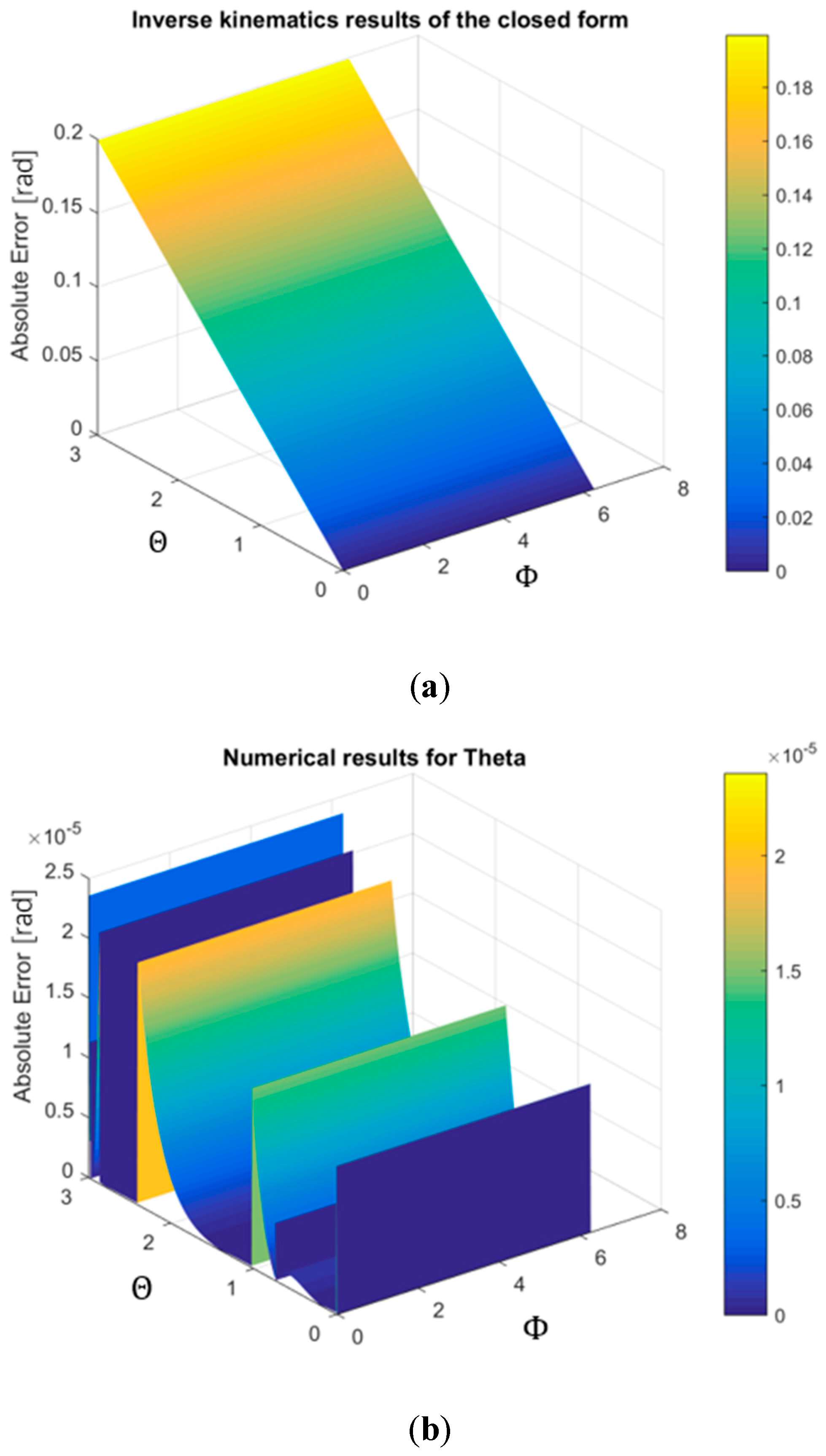
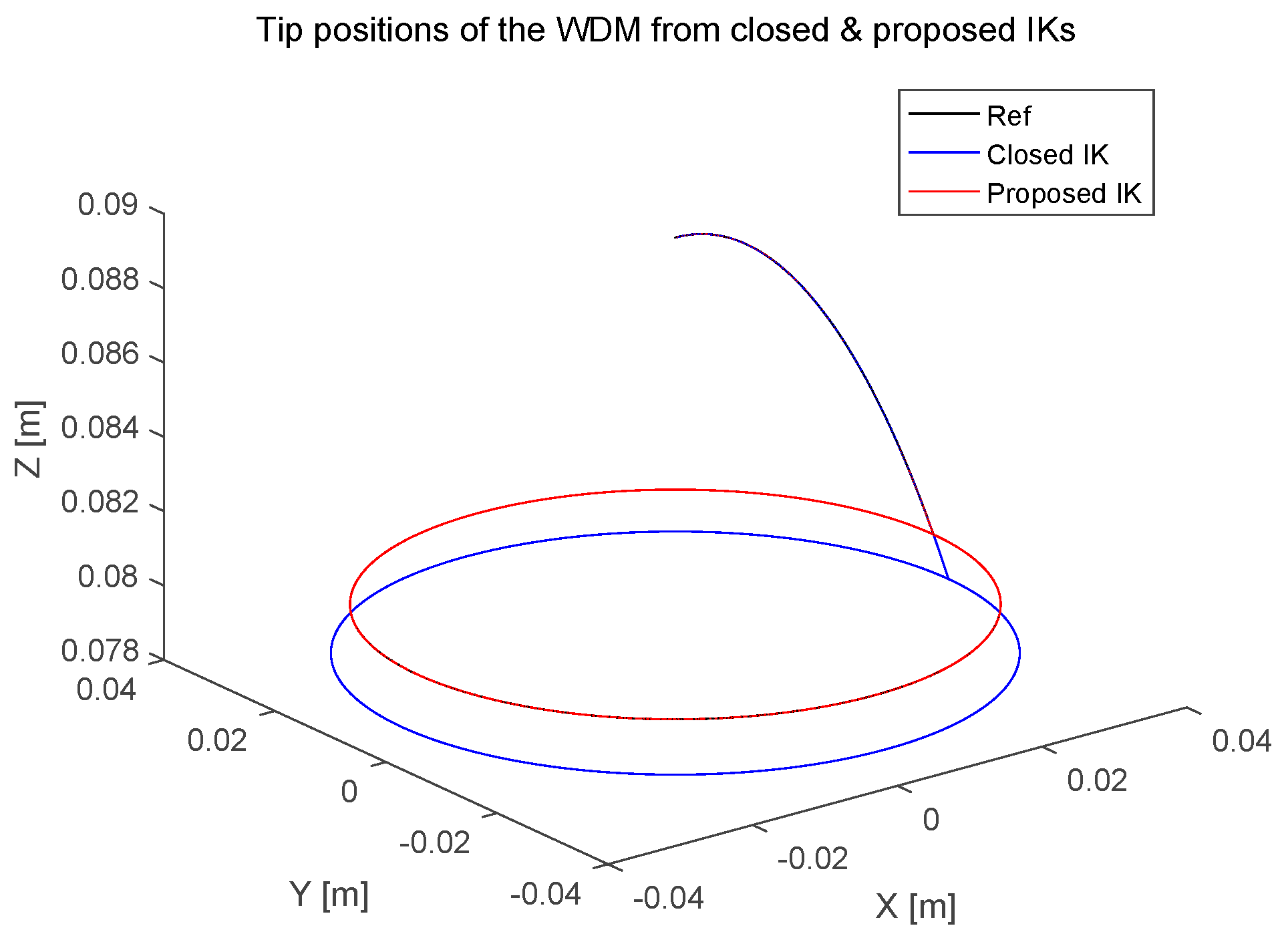
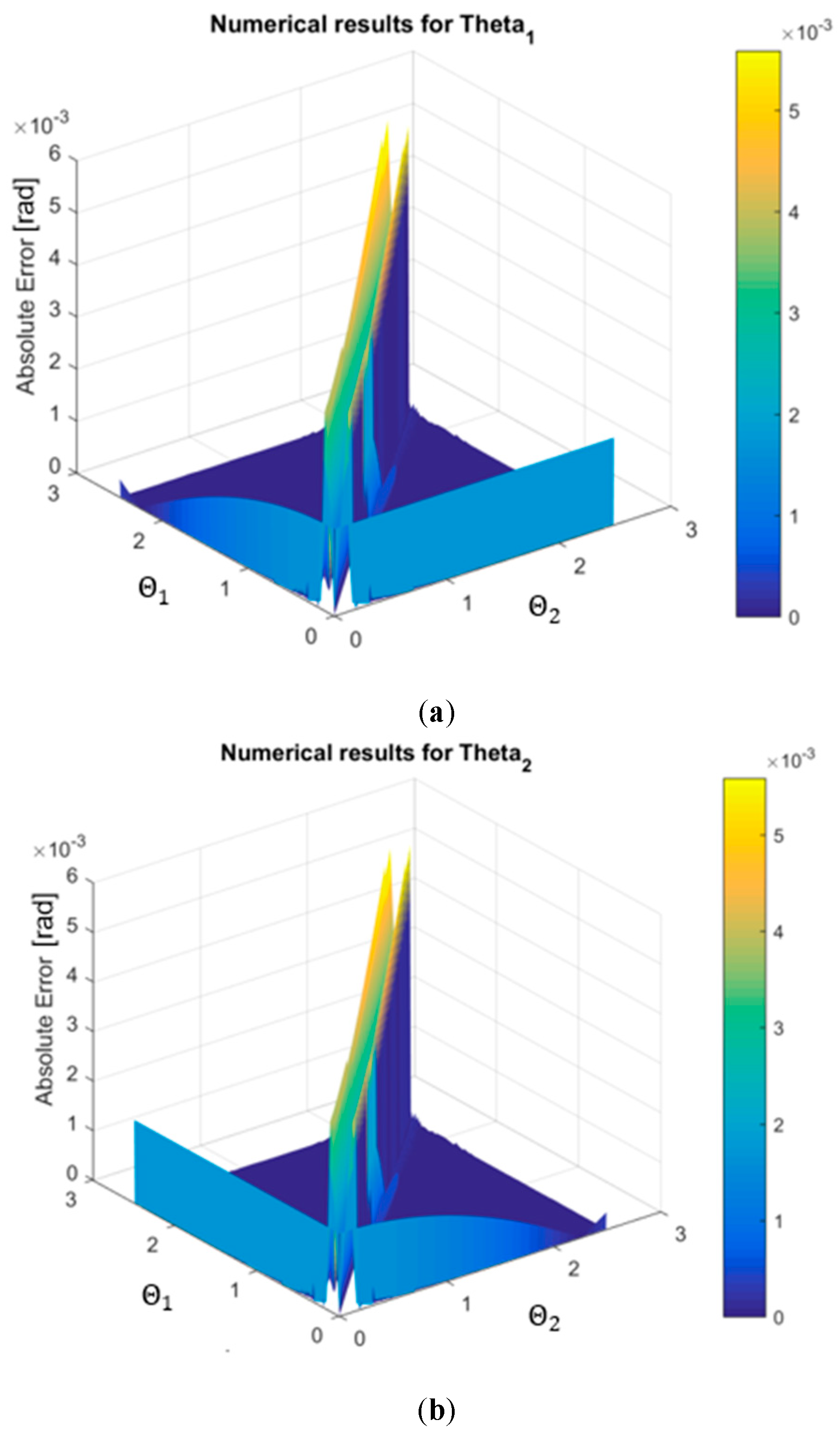
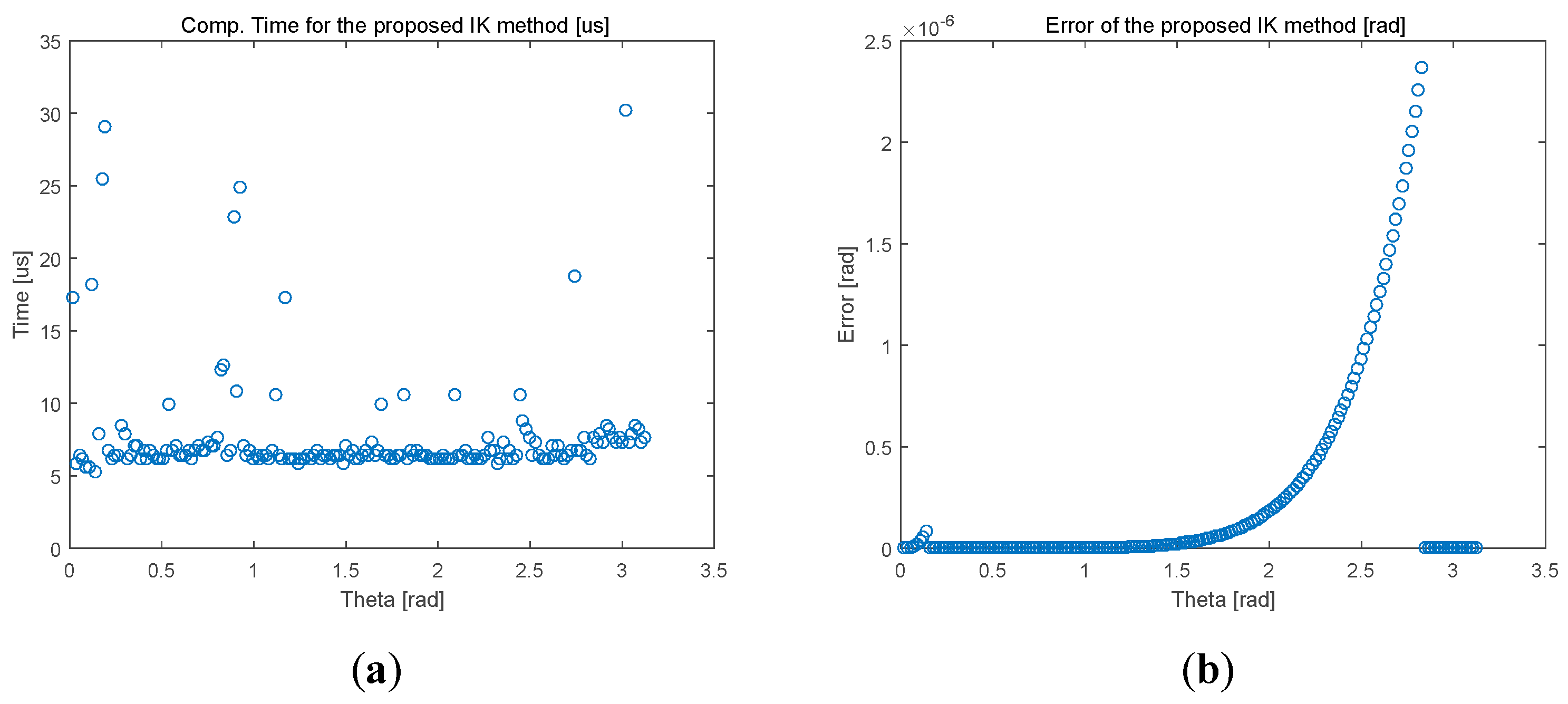
3. Inverse Kinematics with a Geometrical Approximation for the WDM
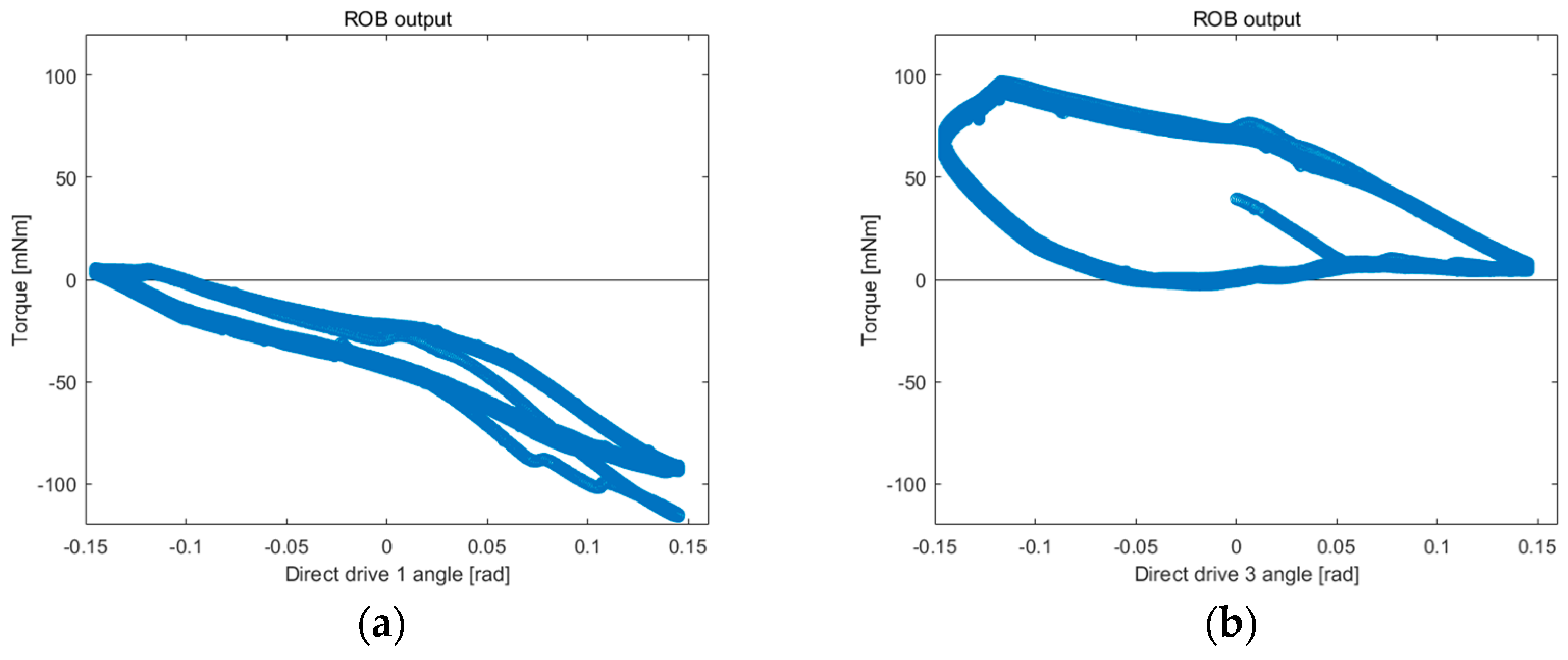
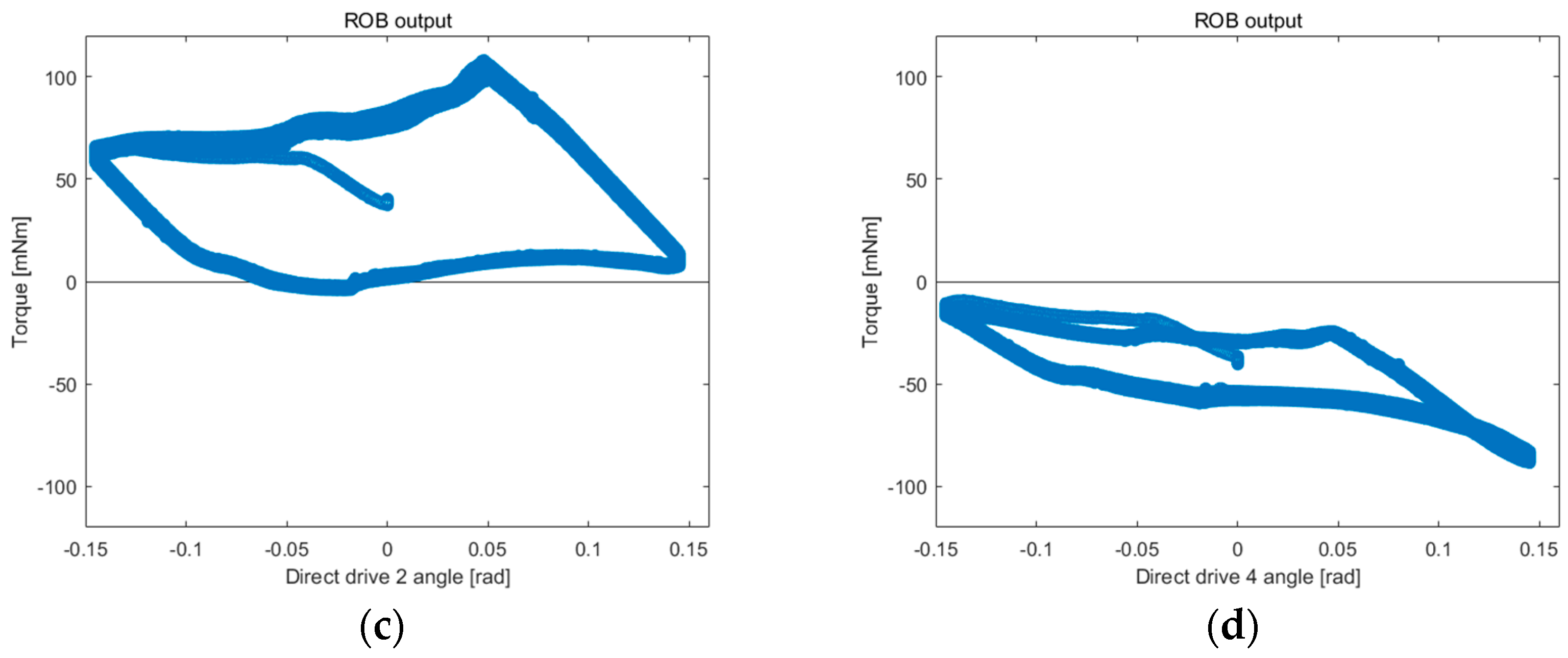
4. Reaction Torque Observer for the WDM
5. Experiments
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Robinson, G.; Davies, J.B.C. Continuum robots—A state of the art. In Proceedings of the IEEE International Conference on Robotics and Automation, Detroit, MI, USA, 10–15 May 1999; pp. 2849–2854. [Google Scholar]
- Burgner-Kahrs, J.; Rucker, D.C.; Choset, H. Continuum robots for medical applications: A survery. IEEE Trans. Robot. 2015, 31, 1261–1280. [Google Scholar] [CrossRef]
- Kato, T.; Okumura, I.; Song, S.E.; Golby, A.J.; Hata, N. Tendon-driven continuum robot for endoscopic surgery: Preclinical development and validation of a tension propagation model. IEEE/ASME Trans. Mechatron. 2015, 20, 2252–2263. [Google Scholar] [CrossRef] [PubMed]
- Kim, Y.; Desai, J.P. Design and kinematic analysis of a neurosurgical spring-based continuum robot using SMA spring actuators. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 1428–1433. [Google Scholar]
- Wang, H.; Chen, J.; Lau, H.Y.K.; Ren, H. Motion planning based on learning from demonstration for multiple-segment flexible soft robots actuated by electroactive polymers. IEEE Trans. Robot. Autom. Lett. 2016, 1, 391–398. [Google Scholar] [CrossRef]
- Rus, D.; Tolley, M.T. Design, fabrication and control of soft robots. Nature 2015, 521, 467–475. [Google Scholar] [CrossRef] [PubMed]
- Su, H.; Cardona, D.C.; Shang, W.; Camilo, A.; Cole, G.A.; Rucker, D.C.; Webster, R.J., III; Fischer, G.S. A MRI-guided concentric tube continuum robot with piezoelectric actuation: A feasibility study. In Proceedings of the IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 1939–1945. [Google Scholar]
- Li, Z.; Ren, H.; Chiu, P.W.Y.; Du, R.; Yu, H. A novel constrained wire-driven flexible mechanism and its kinematic analysis. Mechatron. Mach. Theory 2016, 95, 59–75. [Google Scholar] [CrossRef]
- Dupont, P.E.; Lock, J.; Itkowitz, B.; Butler, E. Design and control of concentric-tube robots. IEEE Trans. Robot. 2010, 26, 209–225. [Google Scholar] [CrossRef] [PubMed]
- Chirikjian, G.S.; Burdick, J.W. A modal approach to hyper-redundant manipulator kinematics. IEEE Trans. Robot. Autom. 1994, 10, 343–354. [Google Scholar] [CrossRef]
- Jones, B.A.; Walker, I.D. Kinematics for multisection continuum robots. IEEE Trans. Robot. 2006, 22, 43–55. [Google Scholar] [CrossRef]
- Neppalli, S.; Csencsits, M.A.; Jones, B.A.; Walker, I.D. Closed-form inverse kinematics for continuum manipulators. Adv. Robot. 2009, 23, 2077–2091. [Google Scholar] [CrossRef]
- Iqbal, S.; Mohammed, S.; Amirat, Y. A guaranteed approach for kinematic analysis of continuum robot based catheter. In Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO), Guilin, China, 19–23 December 2009; pp. 1573–1578. [Google Scholar]
- Xu, K.; Simaan, N. Analytic formulation for kinematics, statics, and shape restoration of multibackbone continuum robots via elliptic integrals. J. Mecha. Robot. 2010, 2, 011006. [Google Scholar] [CrossRef]
- Godage, I.S.; Guglielmino, E.; Branson, D.T.; Medrano-Cerda, G.A.; Caldwell, D.G. Novel modal approach for kinematics of multisection continuum arms. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 1093–1098. [Google Scholar]
- Godage, I.S.; Medrano-Cerda, G.A.; Branson, D.T.; Guglielmino, E.; Caldwell, D.G. Modal kinematics for multisection continuum arms. Bioinspir. Biomim. 2015, 10, 035002. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.; Yang, G.; Yeo, S.H. Inverse kinematics of modular cable-driven snake-like robots with flexible backbones. In Proceedings of the IEEE 5th International Conference on Robotics, Automation and Mechatronics (RAM), Qingdao, China, 17–19 September 2011; pp. 41–46. [Google Scholar]
- Amouri, A.; Mahfoudi, C.; Zaatri, A. Contribution to inverse kinematic modeling of a planar continuum robot using a particle swarm optimization. Multiph. Model. Simul. Syst. Des. Monit. 2015, 2, 141–150. [Google Scholar]
- Chen, J.; Lau, H.Y.K. Learning the inverse kinematics of tendon-driven soft manipulators with K-nearest neighbors regression and Gaussian mixture regression. In Proceedings of the 2nd International Conference on Control, Automation and Robotics (ICCAR), Hong Kong, China, 28–30 April 2016; pp. 103–107. [Google Scholar]
- Webster, R.J., III; Jones, B.A. Design and kinematic modeling of constant curvature continuum robots: A review. Int. J. Robot. Res. 2010, 29, 1661–1683. [Google Scholar] [CrossRef]
- Corke, P. MATLAB toolboxes: robotics and vision for students and teachers. IEEE Robot. Autom. Mag. 2007, 14, 16–17. [Google Scholar] [CrossRef]
- Xu, K.; Simaan, N. An investigation of the intrinsic force sensing capabilities of continuum robots. IEEE Trans. Robot. 2008, 24, 576–587. [Google Scholar] [CrossRef]
- Bajo, A.; Simaan, N. Hybrid motion/force control of multi-backbone continuum robots. Int. J. Robot. Res. 2016, 35, 422–434. [Google Scholar] [CrossRef]
- Toscano, L.; Falkenhahn, V.; Hildebrandt, A.; Braghin, F.; Sawodny, O. Configuration space impedance control for continuum manipulators. In Proceedings of the 6th International Conference on Automation, Robotics and Applications (ICARA), Queenstown, New Zealand, 17–19 Feburary 2015; pp. 597–602. [Google Scholar]
- Kim, S.; Xu, W.; Gu, X.; Ren, H. Preliminary design and study of a bio-inspired wire-driven serpentine robotic manipulator with direct drive capability. In Proceedings of the IEEE International Conference on Information and Automation (ICIA), Ningbo, China, 1–3 August 2016; pp. 1409–1413. [Google Scholar]
- Li, Z.; Du, R. Design and analysis of a bio-inspired wire-driven multi-section flexible robot. Int. J. Adv. Robot. Syst. 2013, 10. [Google Scholar] [CrossRef]
- Katsura, S.; Matsumoto, Y.; Ohnishi, K. Modeling of force sensing and validation of disturbance observer for force control. IEEE Trans. Ind. Electron. 2007, 54, 530–538. [Google Scholar] [CrossRef]
- A Modern C++ Toolkit, Dlib C++ Library. Available online: http://dlib.net/ (accessed on 20 June 2017).
- Tran, Q.V.; Kim, S.; Lee, K.; Kang, S.; Ryu, J. Force/torque sensorless impedance control for indirect driven robot-aided gait rehabilitation system. In Proceedings of the IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Busan, Korea, 7–11 July 2015; pp. 625–657. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Literature | IK Method | Note | |
|---|---|---|---|
| Classification | Computation Time | ||
| A. Jones et al. [11] | Analytic | N/A | Only for manipulator curvature to cable lengths |
| S. Iqbal et al. [13] | Numeric | Average 0.072 s | Interval analysis was used |
| S. Neppalli et al. [12] | Analytic | N/A | --- |
| I. S. Godage et al. [15,16] | Numeric | The order of tens of milliseconds | --- |
| Z. Zhang et al. [17] | Numeric | The order of tens of milliseconds | --- |
| J. Chen and H. Y. K. Lau [19] | Data-driven | N/A | Restricted by a used hardware set-up |
| Link | ||||
|---|---|---|---|---|
| 1 () | 0 | 0 | ||
| 2 (Node: 1) | l | 0 | 0 | |
| 3 (Node: 2) | l | 0 | 0 | |
| N + 1 (Node: N) | l | 0 | 0 | |
| N + 2 (End node) | l | 0 | 0 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, S.; Xu, W.; Ren, H. Inverse Kinematics with a Geometrical Approximation for Multi-Segment Flexible Curvilinear Robots. Robotics 2019, 8, 48. https://doi.org/10.3390/robotics8020048
Kim S, Xu W, Ren H. Inverse Kinematics with a Geometrical Approximation for Multi-Segment Flexible Curvilinear Robots. Robotics. 2019; 8(2):48. https://doi.org/10.3390/robotics8020048
Chicago/Turabian StyleKim, Sehun, Wenjun Xu, and Hongliang Ren. 2019. "Inverse Kinematics with a Geometrical Approximation for Multi-Segment Flexible Curvilinear Robots" Robotics 8, no. 2: 48. https://doi.org/10.3390/robotics8020048
APA StyleKim, S., Xu, W., & Ren, H. (2019). Inverse Kinematics with a Geometrical Approximation for Multi-Segment Flexible Curvilinear Robots. Robotics, 8(2), 48. https://doi.org/10.3390/robotics8020048