Fully Mechatronical Design of an HIL System for Floating Devices



Abstract
1. Introduction
2. Geometric and Kinematic Design
- 6-UPS:
- manipulators with kinematic chain characterised by a sequence of a universal joint at the base (U), an actuated prismatic joint (P) that changes the length of the link as well as a spherical joint (S) connected to the mobile platform;
- 6-RUS:
- manipulators with fixed length links, moved by actuated revolute joints (R) located at the base. The other joints in the kinematic chain are: an intermediate universal joint and a spherical joint connected to the mobile platform;
- 6-PUS:
- manipulators with fixed length links. The actuated prismatic joint is generally composed of a slider moving along a rectilinear guide. The link is connected to the slider by means of a universal joint and to the mobile platform by means of a spherical joint.
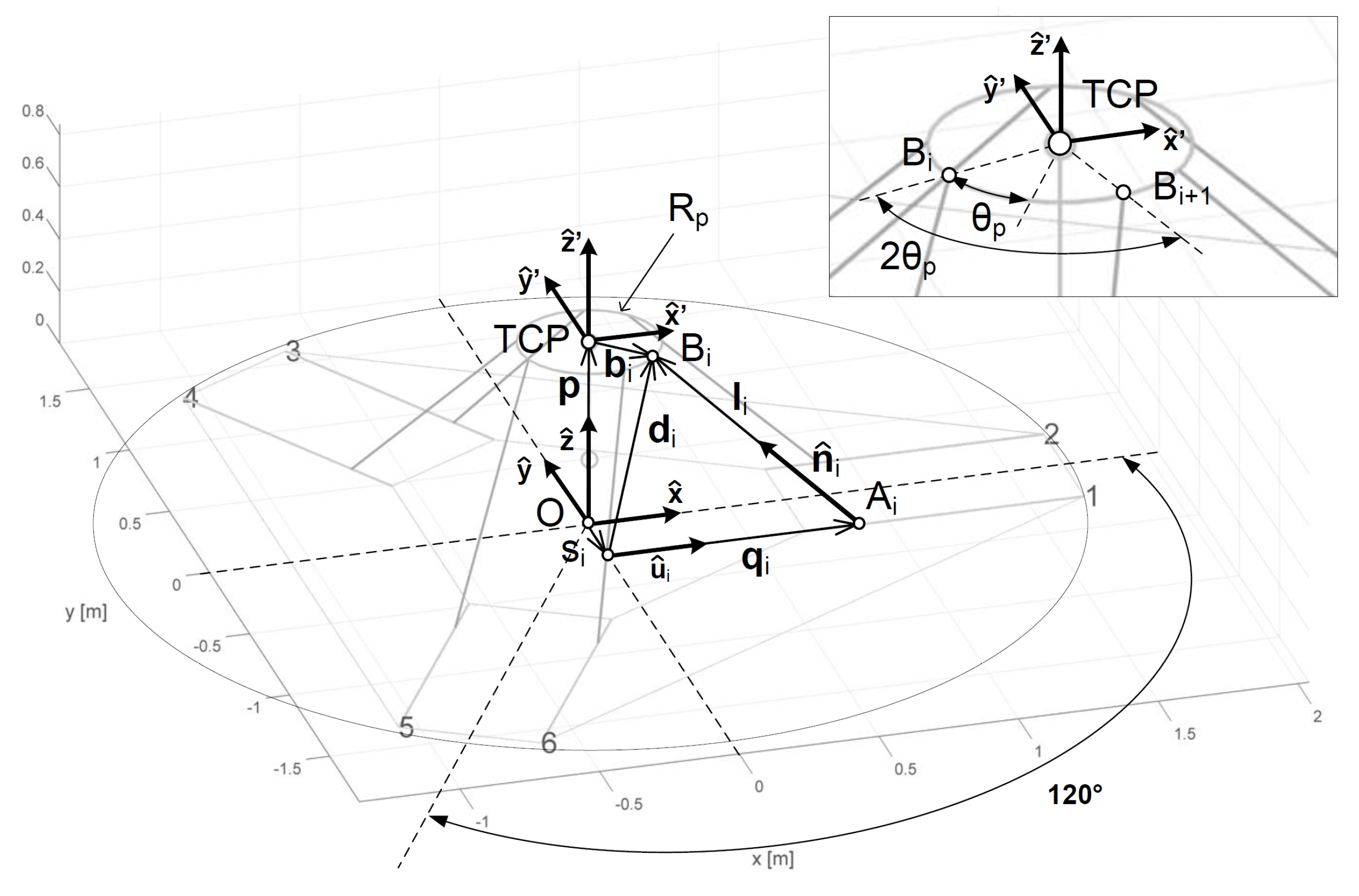
2.1. Kinetostatic Optimization
- s: semi-distance between two parallel guides;
- : length of the links;
- : radius of the circumference on which the platform joint centres are located;
- : semi-angular aperture between the two segments connecting the origin of the Tool Center Point (TCP) reference frame and a couple of platform joints;
- : height of the centre of the desired workspace.
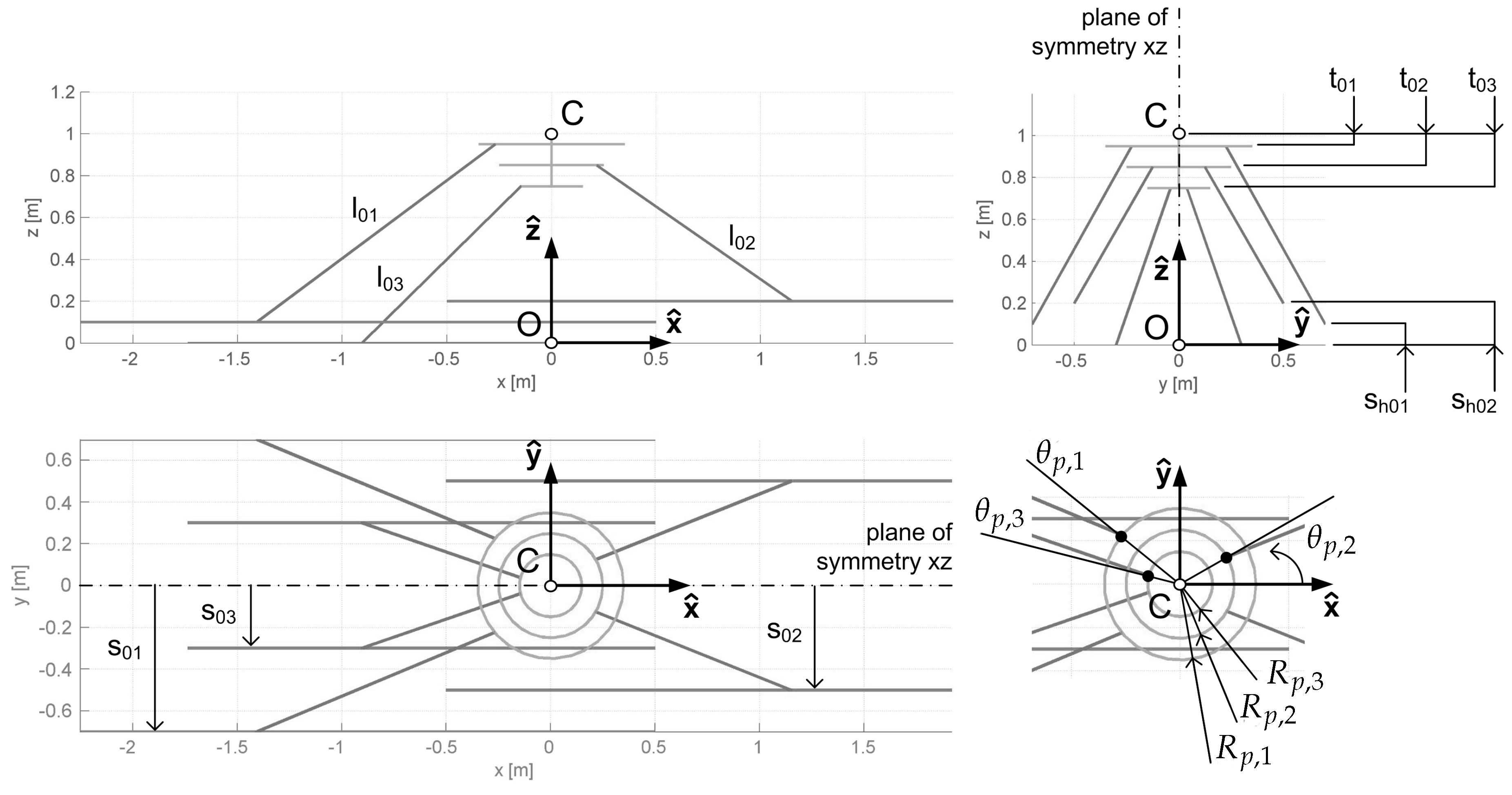
- : radius of the circumference on which the platform joints 1 and 2 are located;
- : radius of the circumference on which the platform joints 3 and 4 are located;
- : radius of the circumference on which the platform joints 5 and 6 are located;
- : semi-angular aperture between the two segments connecting the origin of the TCP reference frame and platform joints 1 and 2;
- : semi-angular aperture between the two segments connecting the origin of the TCP reference frame and platform joints 3 and 4;
- : semi-angular aperture between the two segments connecting the origin of the TCP reference frame and platform joints 5 and 6;
- : vertical distance between TCP and the plane where platform joints 1 and 2 lie;
- : vertical distance between TCP and the plane where platform joints 3 and 4 lie;
- : vertical distance between TCP and the plane where platform joints 5 and 6 lie;
- : length of links 1 and 2;
- : length of links 3 and 4;
- : length of links 5 and 6;
- : semi-distance between parallel guides 1 and 2;
- : semi-distance between parallel guides 3 and 4;
- : semi-distance between parallel guides 5 and 6;
- , : vertical distance between ground and parallel guides;
- : height of the center of the desired workspace.
- Distance between the i-th platform joint and the corresponding base joint should not exceed the length of the link for geometric congruence;
- Each actuated joint coordinate has to be comprised within a range defined by the dimension of the machine, since actuators’ stroke range have a direct impact on the major bulk direction of the machine, longitudinal for the Hexaglide, and radial for the Hexaslide;
- Each passive joint, both platform and base ones, should respect their respective mobility ranges.
- Choice of a sufficiently high number of individuals representing a generation in order to have a significant statistical sample;
- Evaluation of the performance for each individual of the current generation depending on the values assumed by its genes;
- Choice of the group with the better performance that will constitute the elite and will pass unchanged to the next generation;
- Creation of a new generation based on elitary choice, crossover and mutation;
- Computation of the performance of the individuals of the new generation in comparison to the goal desired.
- Topology: both the height and the in plane bulkiness of the manipulator are quite limited. When the robot is in the home position, the links are arranged in such a way that a good compromise is achieved between the capacity to generate velocity in all directions and to bear external forces without too much effort required by the actuators.
- Link-to-link and link-to-platform minimum distances: The link-to-platform minimum distance recorded is above 270 mm throughout the workspace, thus avoiding any risk of collision between the legs.
- Force transmission ratio: the worst case obtained by the computation is closed to the limit value of 5 but restricted to only a few small lower regions of the workspace.
- Actuated joints maximum and minimum stroke: as the joints coordinate distance with respect to the global reference frame is always positive, it is sufficient to check the maximum value in order to evaluate the bulkiness of the robot. This joint coordinate excursion is about 1 m.
- Topology: The in plane bulkiness of this robot is much higher with respect to the Hexaslide. Moreover, the centre of the desired workspace in the optimized configuration is placed in a higher position compared to the Hexaslide configuration.
- Link-to-link and link-to-platform minimum distances: no risk of self-collision between the elements has been detected.
- Force transmission ratio: the transmission ratio remains limited above 2.5.
- Maximum and minimum stroke: the bulkiness of this solution is higher compared to the Hexaglide one.
2.2. Kinematics Analysis
2.2.1. Inverse Kinematics (IK)
2.2.2. Forward Kinematics (FK)
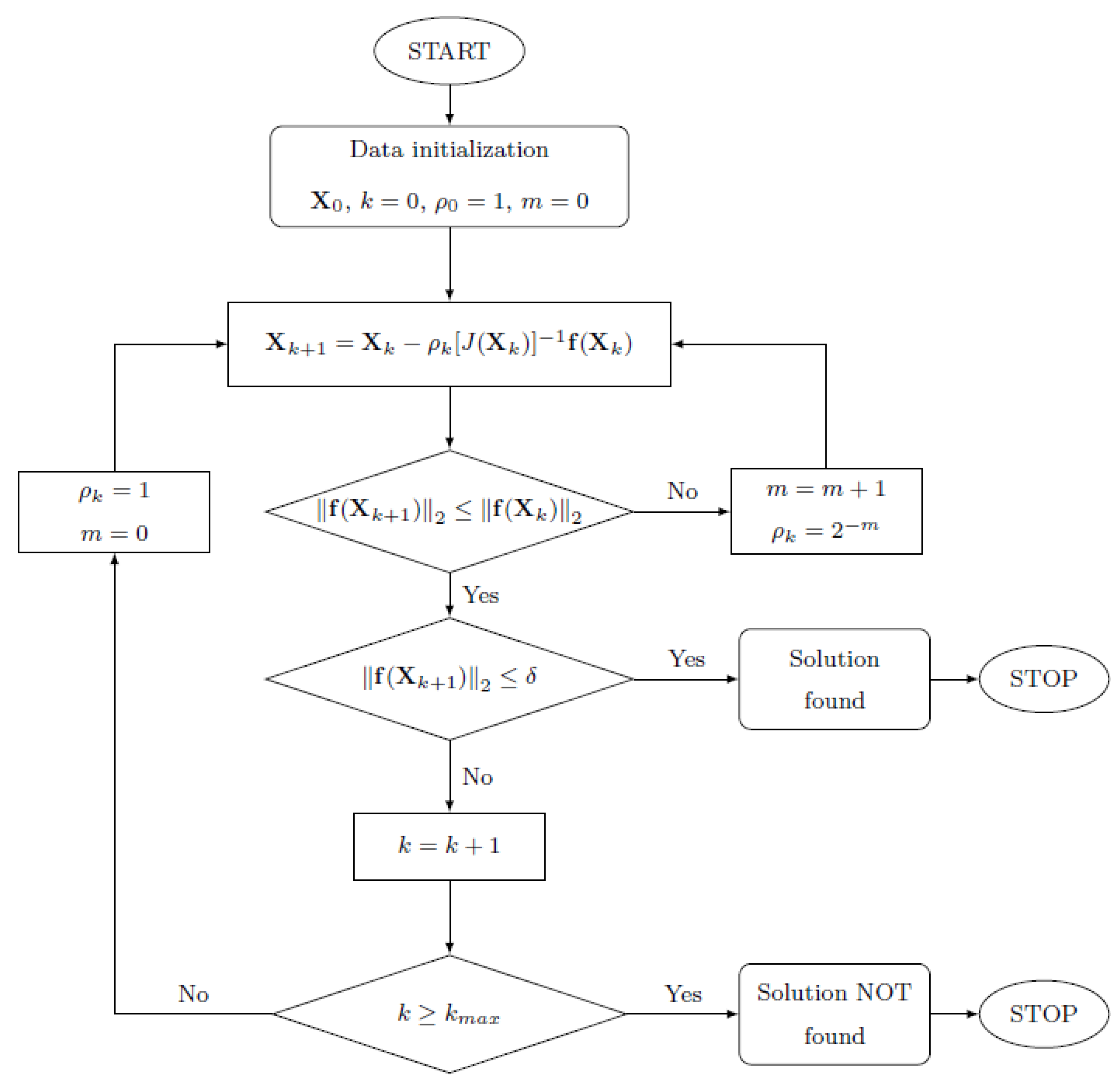
- proper initial approximation of for the solution is chosen and the corresponding is calculated;
- the th solution attempt is calculated according to the following formula:where is the monotonic descent factor. It starts from 1 and during each iteration is calculated as , where m is the number of rechecking times in the corresponding iteration, necessary to obtain the monotonic trend. The approximated Jacobian matrix is evaluated from the first-order Taylor expansion of its partial derivatives and considering a perturbation parameter of 1 × 10. The i-th row and j-th column of the approximated Jacobian matrix is evaluated as:
- convergence criterion is defined imposing the error to satisfy the following inequality:
- the algorithm stops if convergence is achieved or the maximum number of iterations is reached:where is the required computation tolerance and is the given maximum number of iterations.
2.3. Velocity Analysis and Kinetostatic
3. Actuation Chain Sizing
- Initial pose : may vary in the range ;
- Frequency : in the range between and ;
- Phase shift : in the range of ;
- Amplitude : its maximum range is and the relation has to be verified to guarantee that the end-effector remains within the boundaries of the desired workspace. The effective range of is obtained by combining the maximum range with the expressed relation, eventually modifying it in the event that is different from zero.
3.1. Multibody Model
3.2. Monte Carlo Method
- Choice of a sufficiently high number M of simulations, each of which has a specific time history for every DoF.
- Definition of the Probability Density Functions (PDF) of the input parameters that define every motion task: it is assumed that, at the initial instant, the TCP may be located with the same probability in any point of the workspace. The PDFs chosen for the parameters describing the motion are respectively: for the initial pose a uniform distribution, for the frequency a uniform distribution, for phase shift a uniform distribution and for the amplitude a Rayleigh distribution.
- Repeated sampling of the chosen PDFs: each parameter is allocated a random value for each simulation. The result is a set of M vectors fully defining a six-DoF motion task to be assigned to the TCP.
- Solution of the IK problem to find the joint coordinates time histories to be used as inputs for the simulations involving the multibody model.
- Solution of the inverse dynamics problem for each of the M simulations.
- Post-processing: evaluation of a distribution among the M simulations of the parameters of interest.
3.3. Actuating System Sizing Procedure
- Limit on maximum torque:
- Limits on nominal torque:
- Limit on maximum speed:
4. Mechanical Design and Component Sizing
4.1. Robot Description and Overview
4.1.1. Grounded Components
4.1.2. Joints
4.1.3. Links
- Lower rod, made of steel, at one side, directly connected to the Inner shaft of the Joint assembled on the grounded components, the other side is used to pack up the bearing group between a mechanical stop and nuts;
- Bearing case, made of steel, which houses the bearings that provide the rotational DoF along the Link axis, and is connected to the Leg pipe by six screws;
- Leg pipe, a hollow cylinder made of aluminium;
- Distance washer, made of steel, it allows the regulation of the total Link length through a threaded connection with the Upper rod. It is also connected to the Leg pipe by six screws;
- Upper rod, made of steel, the final component connected to the Inner shaft of the Joint assembled on the Platform;
4.1.4. Platform
- Bottom plate, made of aluminium, necessary to sustain and distribute the load and it is the frame of the Platform;
- Three Angular joints holder, made of aluminium, needed to guarantee the correct orientation angle of the Joints;
- Top plate, made of carbon fibres, to give added rigidity to the structure;
- RUAG 6-axis load cell, to measure loads exchanged between the machine and the wind turbine.
4.1.5. Auxiliary System
4.2. Static Analysis
- Grounded components: The symmetry of the assembly allows one to take into account only one third of the frame. Moreover, only the aluminium profile of the linear actuator is taken into account because it bears the vertical loads. A “worst” vertical load (i.e., 2500 N) is applied on each guide and positioned with different combinations of the total actual stroke of the sliders (i.e., 0%, 25%, 50%, 75%, 100%). Local stresses and strains never exceed the limit values, Figure 17a.
- Joint: bearings have been substituted with rigid components to simplify the assessment. Different configurations of angle are tested both as regards compression and traction with an applied load of 2500 N, Figure 18a,b. Only the rod shows visible deformations and stresses. In order to better investigate the behaviour of internal components, other analyses have been carried out and no problems have been reported by the results:
- −
- Inner Block: a load of 2500 N is split into two equal loads, each one acting on a set of bearings. Maximum stress registered is 85 MPa, which is far below the admissible stress of 250 MPa, Figure 19a.
- −
- Support shaft: a load of 1250 N is applied for simulating the presence of two Support blocks per Joint. The test is effected by loading one end of the shaft and maintaining the other one fixed, Figure 19b.
- −
- Inner shaft: a load of 2500 N is applied in the midspan and both ends are pinned in order to simulate the presence of the two bearings, Figure 20a.
- Platform: two horizontal forces are applied at different heights on the TCP. The first of 200 N located at 1.0 m and the second of 100 N at 1.5 m corresponding, respectively, to equivalent inertial load and aerodynamic thrust due to the pay load. These loads are borne very well by the structure both in terms of stress and displacement, Figure 17b.
- Lifting system: this device has to generate a total lift of 150 mm in a time span of about 15 s with a cycloidal motion curve and must also bear the weight of all the moving parts of the robot. This system has been developed in order to help the robot to overcome the singularity configuration during the start and stop procedures. The analysis reveals maximum values occurrence at the initial phase of the rise and FEM analysis ensures that stress remains below the critical values.
4.3. Purchased Components’ Sizing
4.3.1. Motors
4.3.2. Linear Actuator
4.3.3. Other Components
4.4. Modal Analysis
- Identification of planes that intersect the workspace.
- Identification of a grid of equally spaced points on each plane.
- Discretization of pitch, roll and yaw angles describing the end-effector orientation:
- −
- Three roll angles: −5, 0, +5,
- −
- Five pitch angles: −8, −4, 0, +4, +8,
- −
- Three yaw angles: −3, 0, +3.
- Modification of the pose of the robot in order to have the end-effector placed in correspondence to each point of the grid and exploring all the possible orientations.
- In correspondence to each pose, linearization of the flexible virtual model and computation of the frequency associated to the first normal mode.
- For each point of the grid, recording the lowest value of frequency among the ones obtained by changing the orientation angles.
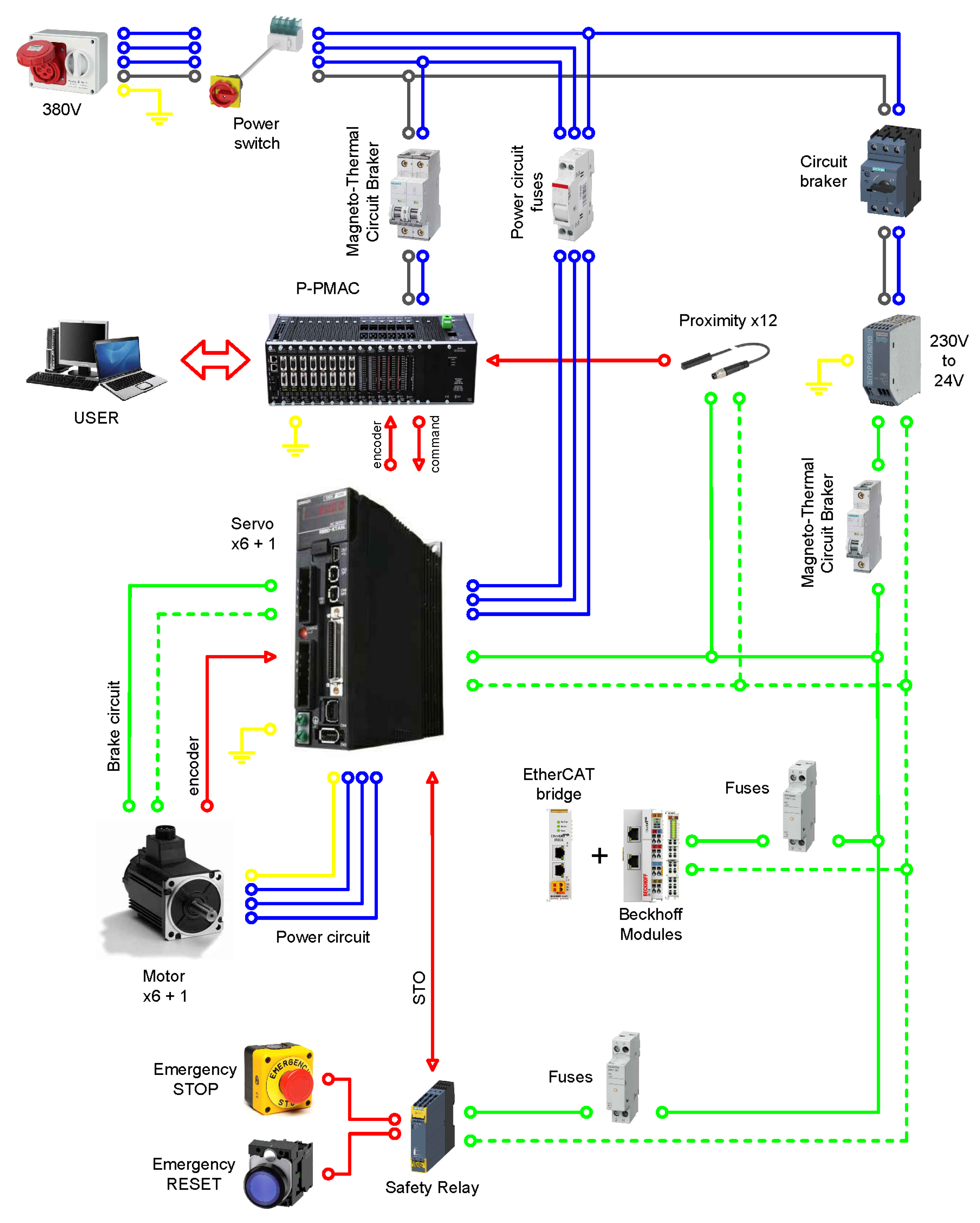
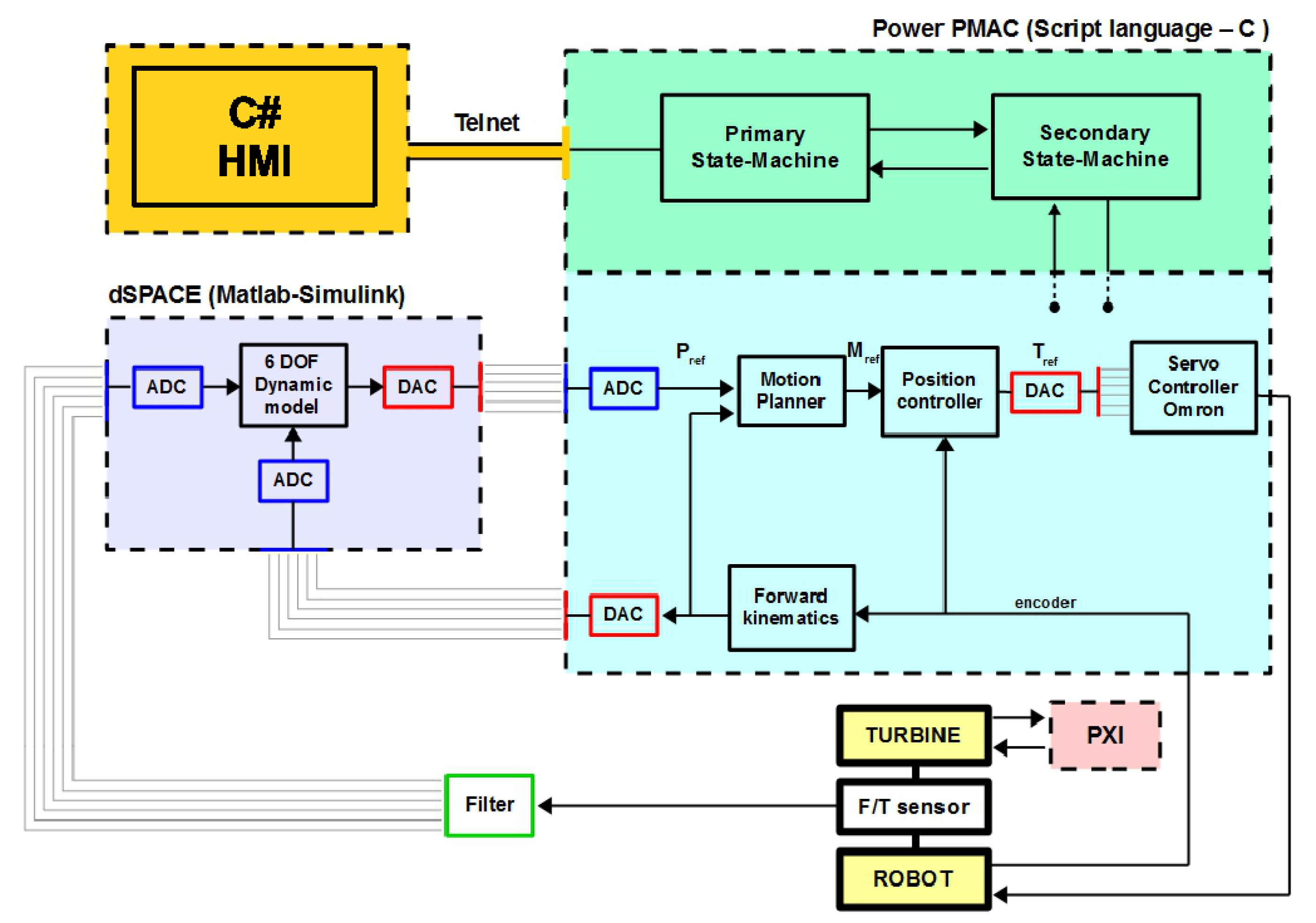
5. Control Architecture and Electronics
- EtherCAT modules: the Beckhoff EtherCAT module EK1100 is connected to two EL1008 modules, each of them providing eight digital inputs, and to one EL2008 module that makes available eight digital outputs.
- Servo amplifiers: their main function is to power the motors according to the signals coming from the motion controller. They also process and gather the feedback signals of the motors’ encoders to bring them to Power PMAC. Both signals are transported to and from the servo amplifier into a single cable that is then split into an actual terminal board to be brought to the correct connectors of Power PMAC. Each servo amplifier has the main task of closing the current and phase commutation feedback loop for the motor, starting from the torque reference provided by the Power PMAC motion controller.
- Power PMAC: this is the core of the electrical architecture, it is a general-purpose embedded computer with a built-in motion and machine-control application. It also provides a wide variety of hardware machine interface circuits that allow the connection to common servo and stepper drives, feedback sensors, and analogue and digital I/O points.
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Sauder, T.; Chabaud, V.; Thys, M.; Bachynski, E.E.; Sæther, L.O. Real-time hybrid model testing of a braceless semi-submersible wind turbine: Part I—The hybrid approach. In Proceedings of the 2016 35th International Conference on Ocean, Offshore and Arctic Engineering, Madrid, Spain, 17–22 June 2016; American Society of Mechanical Engineers: New York, NY, USA, 2016; p. V006T09A039. [Google Scholar]
- Bayati, I.; Belloli, M.; Ferrari, D.; Fossati, F.; Giberti, H. Design of a 6-DoF robotic platform for wind tunnel tests of floating wind turbines. Energy Procedia 2014, 53, 313–323. [Google Scholar] [CrossRef]
- Bayati, I.; Belloli, M.; Bernini, L.; Giberti, H.; Zasso, A. Scale model technology for floating offshore wind turbines. IET Renew. Power Gener. 2017, 11, 1120–1126. [Google Scholar] [CrossRef]
- Giberti, H.; Ferrari, D. A novel hardware-in-the-loop device for floating offshore wind turbines and sailing boats. Mech. Mach. Theory 2015, 85, 82–105. [Google Scholar] [CrossRef]
- Fiore, E.; Giberti, H. Optimization and comparison between two 6-DoF parallel kinematic machines for HIL simulations in wind tunnel. MATEC Web Conf. 2016, 45, 04012. [Google Scholar] [CrossRef]
- Ferrari, D.; Giberti, H. A genetic algorithm approach to the kinematic synthesis of a 6-DoF parallel manipulator. In Proceedings of the 2014 IEEE Conference on Control Applications (CCA), Juan Les Antibes, France, 8–10 October 2014; pp. 222–227. [Google Scholar]
- Merlet, J. Jacobian, manipulability, condition number, and accuracy of parallel robots. J. Mech. Des. 2006, 128, 199–206. [Google Scholar] [CrossRef]
- Legnani, G.; Tosi, D.; Fassi, I.; Giberti, H.; Cinquemani, S. The “point of isotropy” and other properties of serial and parallel manipulators. Mech. Mach. Theory 2010, 45, 1407–1423. [Google Scholar] [CrossRef]
- Vinje, T. The statistical distribution of wave heights in a random seaway. Appl. Ocean Res. 1989, 11, 143–152. [Google Scholar] [CrossRef]
- Xu, D.; Li, X.; Zhang, L.; Xu, N.; Lu, H. On the distributions of wave periods, wavelengths, and amplitudes in a random wave field. J. Geophys. Res. C 2004, 109. [Google Scholar] [CrossRef]
- Fiore, E.; Giberti, H.; Bonomi, G. An innovative method for sizing actuating systems of manipulators with generic tasks. Mech. Mach. Sci. 2017, 47, 297–305. [Google Scholar] [CrossRef]
- Fiore, E.; Giberti, H.; Ferrari, D. Dynamics modeling and accuracy evaluation of a 6-DoF Hexaslide robot. In Nonlinear Dynamics; Springer: Berlin, Germany, 2016; Volume 1, pp. 473–479. [Google Scholar]
- Giberti, H.; Cinquemani, S.; Legnani, G. A practical approach to the selection of the motor-reducer unit in electric drive systems. Mech. Based Des. Struct. Mach. 2011, 39, 303–319. [Google Scholar] [CrossRef]
- La Mura, F.; Todeschini, G.; Giberti, H. High Performance Motion-Planner Architecture for Hardware-In-the-Loop System Based on Position-Based-Admittance-Control. Robotics 2018, 7, 8. [Google Scholar] [CrossRef]
- La Mura, F.; Romanó, P.; Fiore, E.; Giberti, H. Workspace Limiting Strategy for 6 DOF Force Controlled PKMs Manipulating High Inertia Objects. Robotics 2018, 7, 10. [Google Scholar] [CrossRef]





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Lower Bound | Upper Bound | Optimal Value | MU |
|---|---|---|---|---|
| 400 | 500 | 463.6 | mm | |
| s | 200 | 300 | 203.1 | mm |
| l | 400 | 700 | 686.6 | mm |
| 200 | 250 | 238.7 | mm | |
| 0 | 60 | 38.5 |
| Symbol | Lower Bound | Upper Bound | Optimal Value | MU |
|---|---|---|---|---|
| 500 | 700 | 593.9 | mm | |
| 100 | 980 | 1050.8 | mm | |
| 100 | 980 | 277.7 | mm | |
| 100 | 980 | 330.2 | mm | |
| 600 | 1600 | 1207.7 | mm | |
| 600 | 1600 | 873.9 | mm | |
| 600 | 1600 | 825.7 | mm | |
| 200 | 400 | 306.2 | mm | |
| 200 | 400 | 326.7 | mm | |
| 200 | 400 | 275.9 | mm | |
| −200 | 0 | −183.0 | mm | |
| −200 | 0 | −72.4 | mm | |
| −200 | 0 | 22.9 | mm | |
| 10 | 170 | 77.3 | ||
| 10 | 170 | 37.9 | ||
| 10 | 170 | 100.6 |
| Parameter | Value | Limit Value | UM | |
|---|---|---|---|---|
| Length of the guide | 1100 | > | 650 | mm |
| Max velocity | 1.67 | < | 2.66 | m/s |
| Max acceleration | 28.5 | < | 50 | m/s |
| 1385 | < | 12,250 | N | |
| 1385 | < | 69,600 | N | |
| 1385 | < | 69,600 | N | |
| 174 | < | 3028 | Nm | |
| 174 | < | 2290 | Nm | |
| 174 | < | 2290 | Nm |
| (a) OMRON R88M-K2K030F-BS2 Main Characteristics | ||
| Characteristic | Value | MU |
| Tension | 400 | V |
| Nominal Power | 2000 | W |
| Nominal Torque | 6.37 | Nm |
| Maximum Torque | 19.1 | Nm |
| Nominal velocity | 3000 | rpm |
| Maximum velocity | 5000 | rpm |
| (b) OMRON R88M-K20030T-BS2 Main Characteristicss | ||
| Characteristic | Value | MU |
| Tension | 230 | V |
| Nominal Power | 200 | W |
| Nominal Torque | 0.64 | Nm |
| Maximum Torque | 1.91 | Nm |
| Nominal velocity | 3000 | rpm |
| Maximum velocity | 6000 | rpm |
| (a) ROLLON TH145 SP4 Main Characteristics | ||
| Characteristic | Value | MU |
| Total length | 1100 | mm |
| Width | 145 | mm |
| Thickness | 85 | mm |
| Screw diameter | 20 | mm |
| Number of charts | 2 | - |
| Total system mass | 30 | kg |
| (b) Igus Triflex TRE.40 Main Characteristics | ||
| Characteristic | Value | MU |
| Total length | 1600 | mm |
| Number of chain links | 116 | - |
| External diameter | 43 | mm |
| Curvature radius | 58 | mm |
| Maximum single cable diameter | 13 | mm |
| Maximum relative rotation | ±10 | |
| (a) Eigenmodes Frequencies Calculated through Inventor | |
| Eigenmode index | Frequency |
| I | 151 Hz |
| II | 154 Hz |
| III | 210 Hz |
| (b) Eigenmodes Frequencies Calculated through Simplified Adams Model | |
| Eigenmode index | Frequency |
| I | 169 Hz |
| II | 171 Hz |
| III | 222 Hz |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Giberti, H.; La Mura, F.; Resmini, G.; Parmeggiani, M. Fully Mechatronical Design of an HIL System for Floating Devices. Robotics 2018, 7, 39. https://doi.org/10.3390/robotics7030039
Giberti H, La Mura F, Resmini G, Parmeggiani M. Fully Mechatronical Design of an HIL System for Floating Devices. Robotics. 2018; 7(3):39. https://doi.org/10.3390/robotics7030039
Chicago/Turabian StyleGiberti, Hermes, Francesco La Mura, Gabriele Resmini, and Marco Parmeggiani. 2018. "Fully Mechatronical Design of an HIL System for Floating Devices" Robotics 7, no. 3: 39. https://doi.org/10.3390/robotics7030039
APA StyleGiberti, H., La Mura, F., Resmini, G., & Parmeggiani, M. (2018). Fully Mechatronical Design of an HIL System for Floating Devices. Robotics, 7(3), 39. https://doi.org/10.3390/robotics7030039