Robust Interval Type-2 Fuzzy Sliding Mode Control Design for Robot Manipulators


Abstract
1. Introduction
- (1)
- a new robust algorithm is proposed for n-link robot manipulator systems to deal with the tracking control problems, with the following considerations are taken into account:
- The dynamics of the robot manipulator systems are only partially known and present parametric variations.
- The studied systems are subject to unknown disturbances.
- No prior knowledge of the upper bound of the parametric uncertainties, unknown dynamics, un-modeled dynamics, and unknown disturbances that affect the studied system dynamics is required.
- (2)
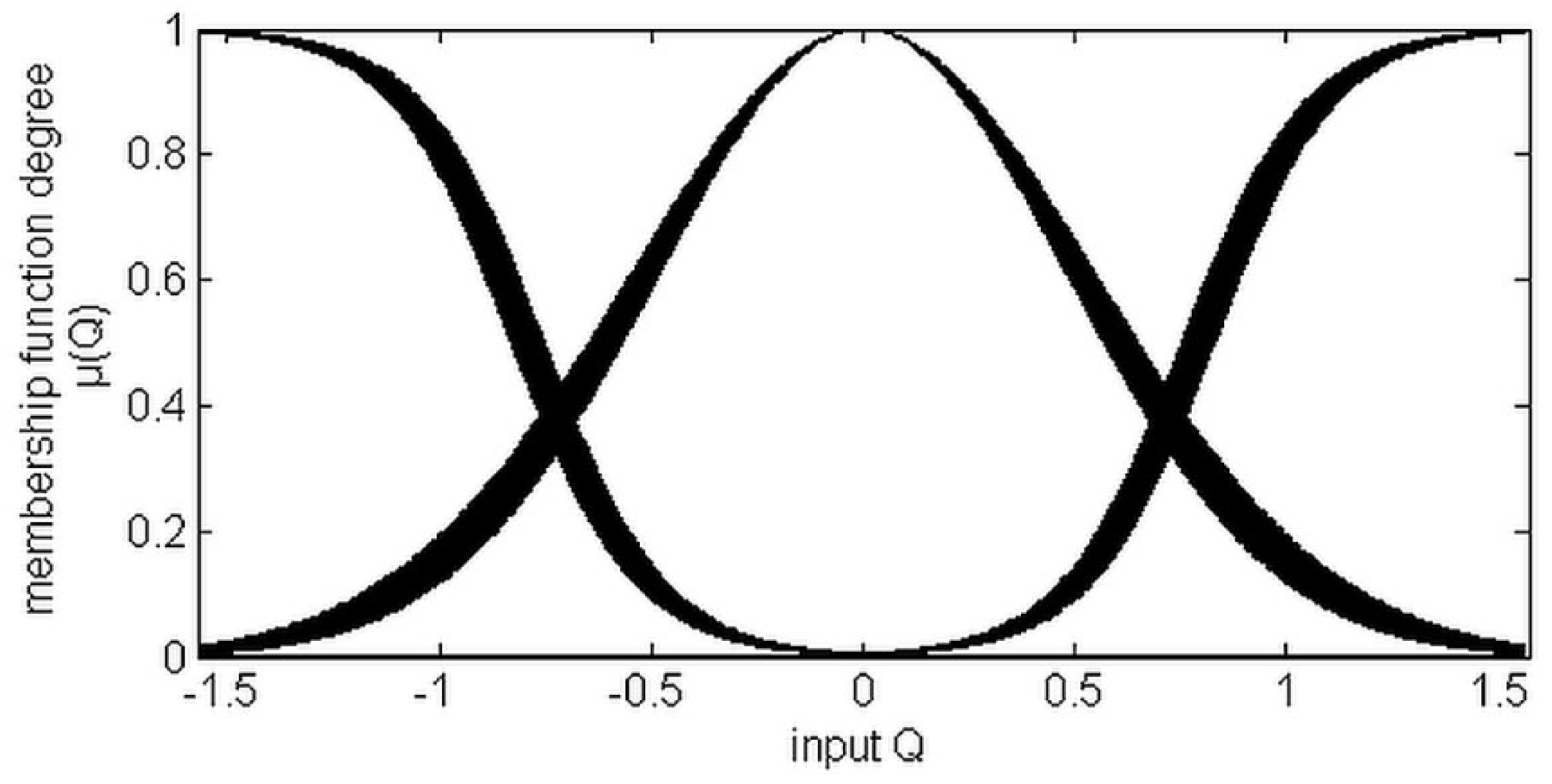
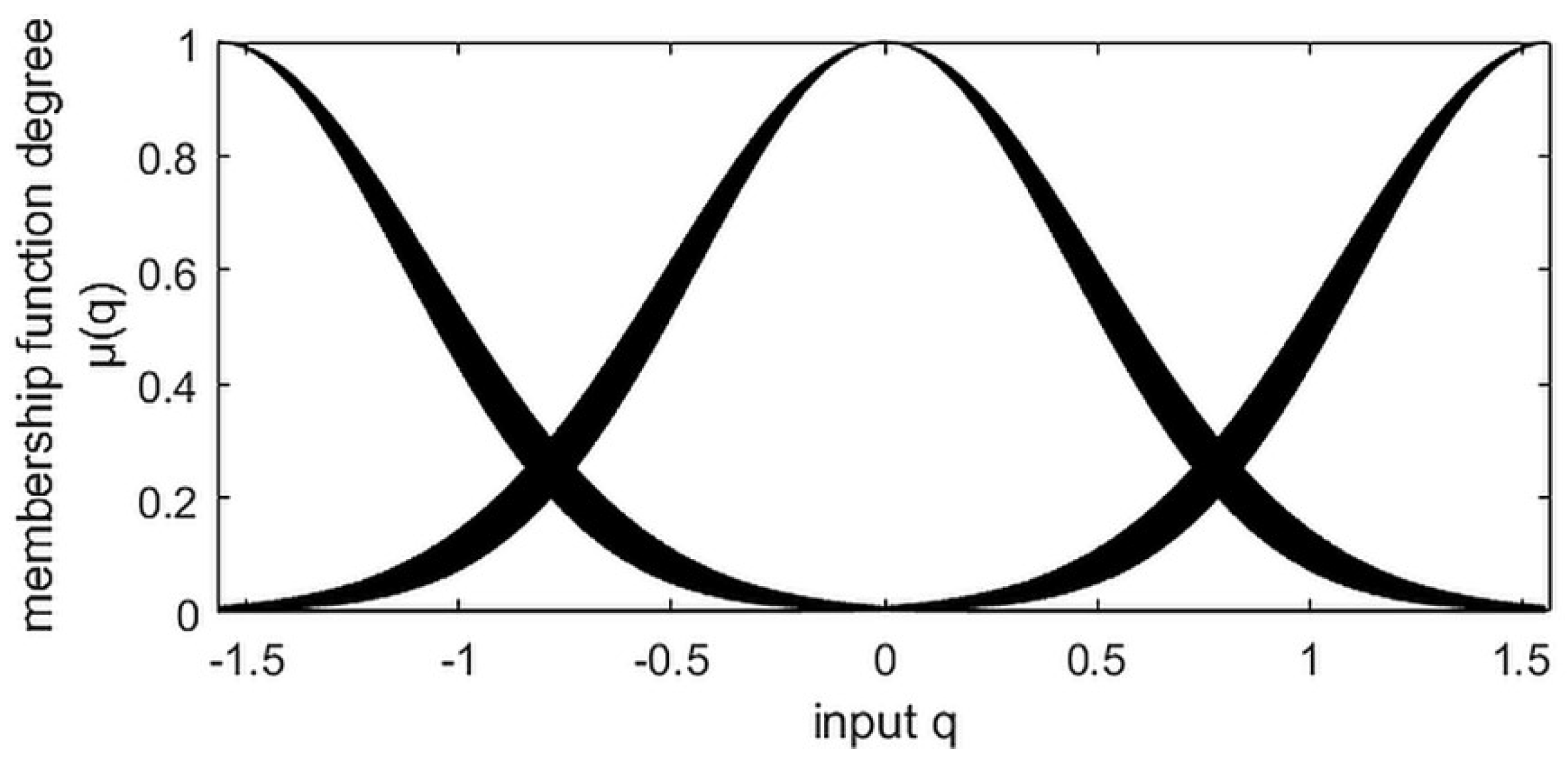
- Based on T2-FLS, two adaptive interval T2-FLSs (AIT2-FLSs) are designed in order to efficiently estimate the parametric uncertainties of the system dynamics. FSs are chosen to be interval T2 (IT2), firstly, because they do not require a lot of computation, and, secondly, for their efficiency to capture severe uncertainties.
- (3)
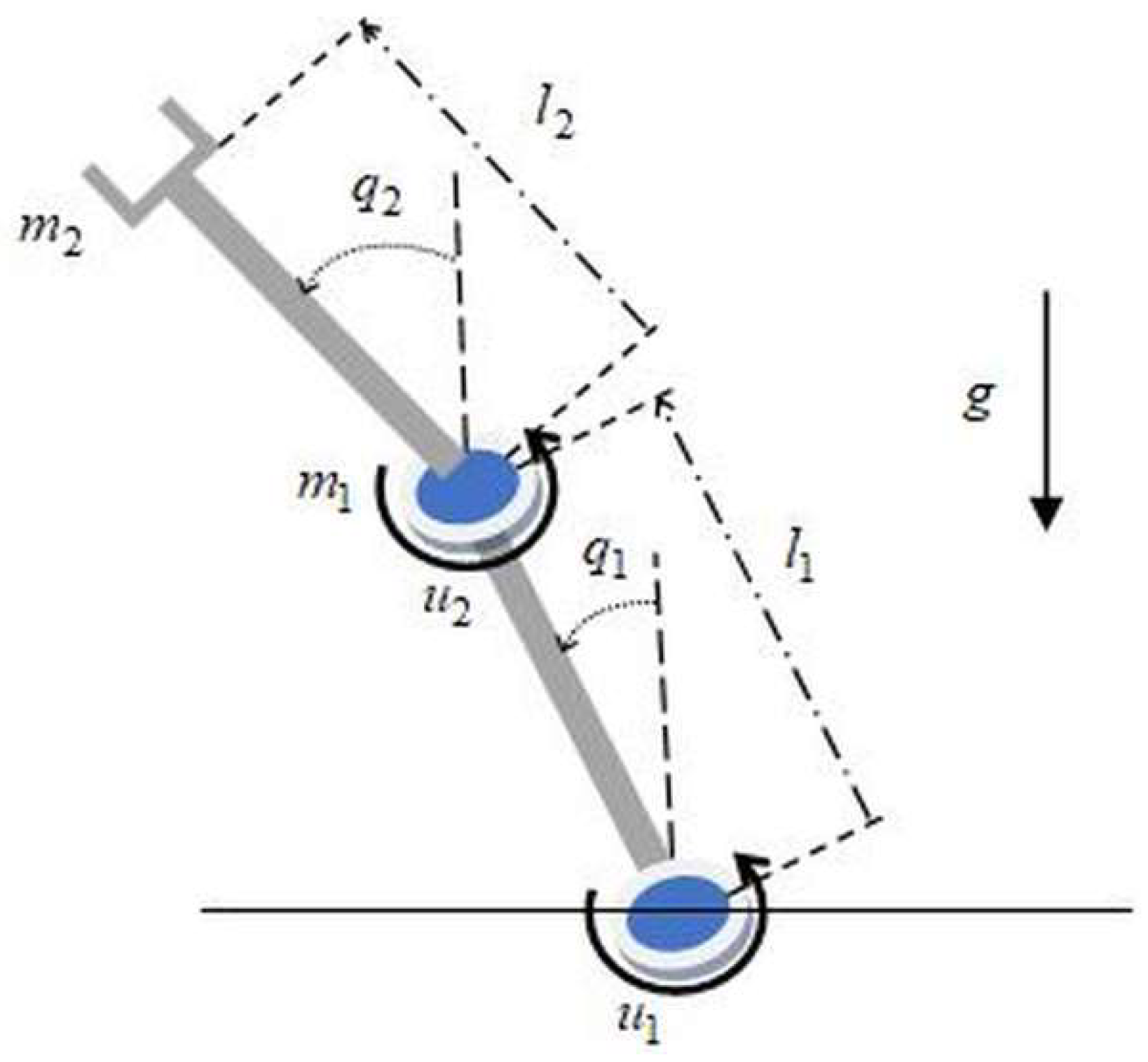
- In order to handle errors approximation of parametric uncertainties and effectively reject the effects of unknown dynamics, un-modeled dynamics, and unknown disturbances on the control system without generating the undesired chattering, a new enhanced robust AIT2-FSMC law is designed so as to generate three adaptive control laws in order to provide the optimal estimation of the control law gains that effectively reject all of the undesired effects that perturb the control system while yielding a smooth global control law. Thus, the best tracking control performance is guaranteed. The adaptation laws of the synthesized controller parameters have been designed in the sense of the Lyapunov stability approach. Finally, a 2-link robot manipulator is used as a study case to validate the effectiveness of the proposed control approach.
2. Problem Formulation
3. Proposed Control Approach
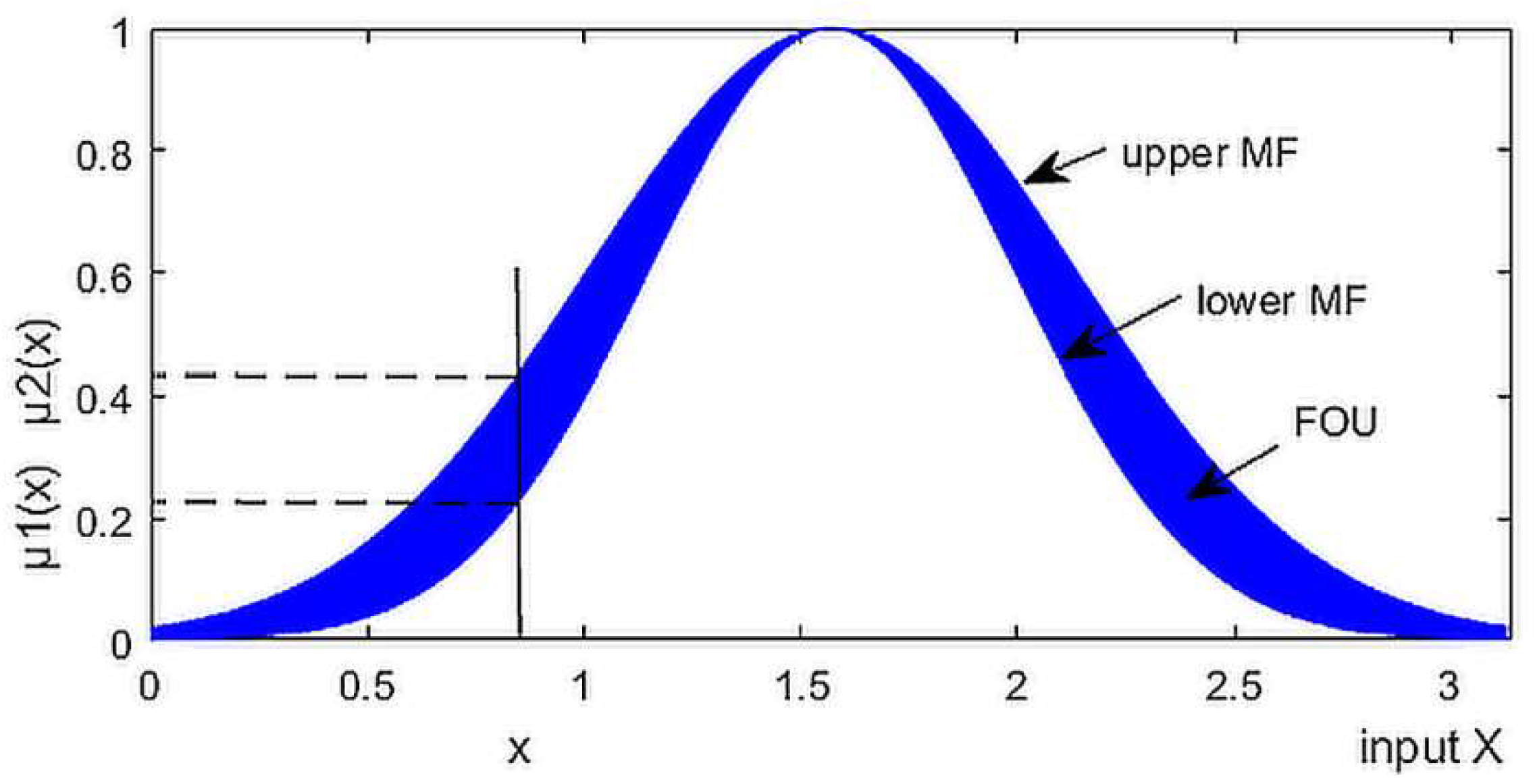
3.1. Introduction to Type-2 Fuzzy Logic Systems
3.1.1. Interval Type-2 Fuzzy System
3.1.2. Type Reduction for Interval Type-2 Fuzzy Sets
3.2. Control Law Design
3.2.1. Sliding Mode Control Law
3.2.2. Adaptive Interval Type-2 Fuzzy Sliding Mode Control Law
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Purwar, S.; Kar, I.N.; Jha, A.N. Adaptive control of robot manipulators using fuzzy logic systems under actuator constraints. Fuzzy Sets Syst. 2005, 152, 651–664. [Google Scholar] [CrossRef]
- Cuong, P.V.; Nan, W.Y. Adaptive trajectory tracking neural network with robust compensator for robot manipulators. Neural Comput. Appl. 2016, 27, 525–536. [Google Scholar] [CrossRef]
- Gauzman, C.A.C.; Bustos, L.T.A.; Rubio, J.O.M. Analysis and synthesis of global nonlinear H∞ controller for robot manipulators. Math. Probl. Eng. 2015, 2015, 410873. [Google Scholar] [CrossRef]
- Haghighi, S.T.; Piltan, F.; Kim, J.M. Robust composite high-order super-twisting sliding mode control of robot manipulators. Robotics 2018, 7, 13. [Google Scholar] [CrossRef]
- Rubio, J.J.; Pieper, J.; Meda-Campana, J.A.; Aguilar, A.; Rangel, V.I.; Gutierrez, J.G. Modelling and regulation of two mechanical systems. IET Sci. Meas. Technol. 2018. [Google Scholar] [CrossRef]
- Zhang, F. High-speed nonsingular terminal switched sliding mode control of robot manipulators. IEEE/CAA J. Autom. Sin. 2017, 4, 775–781. [Google Scholar] [CrossRef]
- Pan, Y.; Liu, Y.; Xu, B.; Yu, H. Hybrid feedback feedforward: An efficient design of adaptive neural network control. Neural Netw. 2016, 76, 122–134. [Google Scholar] [CrossRef] [PubMed]
- El Kari, A.; Essounbuli, N.; Hamzaoui, A. Commande adaptative floue robuste: Application à la commande en poursuite d’un robot. Phys. Chem. News 2003, 10, 31–38. [Google Scholar]
- Rubio, J.J. Robust feedback linearization for nonlinear processes control. ISA Trans. 2018, 74, 155–164. [Google Scholar] [CrossRef] [PubMed]
- Zi, B.; Sun, H.; Zhu, Z.; Qian, S. The dynamics and sliding mode control of multiple cooperative welding robot manipulators. Int. J. Adv. Robot. Syst. 2012, 9. [Google Scholar] [CrossRef]
- Pan, Y.; Guo, Z.; Li, X.; Yu, H. Output-feedback adaptive neural control of a compliant differential SMA actuator. IEEE Trans. Control Syst. Technol. 2017, 6, 2202–2210. [Google Scholar] [CrossRef]
- Londhe, P.S.; Santhakumar, M.; Patre, B.M.; Waghmare, L.M. Task space control of an autonomous underwater vehicle manipulator system by robust single-input fuzzy logic control sheme. IEEE J. Ocean. Eng. 2017, 42, 13–28. [Google Scholar] [CrossRef]
- Chen, Z.; Li, Z.; Chen, C.L.P. Disturbance observer-based fuzzy control of uncertain MIMO mechanical systems with input nonlinearities and its application to robotic exoskeleton. IEEE Trans. Cybern. 2017, 47, 984–994. [Google Scholar] [CrossRef] [PubMed]
- Fateh, M.M.; Souzanchikashani, M. Indirect adaptive fuzzy control for flexible-joint robot manipulators using voltage control strategy. J. Intell. Fuzzy Syst. 2015, 28, 1451–1459. [Google Scholar] [CrossRef]
- Kayacan, E.; Kayacan, E.; Ramon, H.; Kaynak, O.; Saeys, W. Towards agrobots: Trajectory control of an autonomous tractor using type-2 fuzzy logic controllers. IEEE/ASME Trans. Mech. 2015, 20, 287–298. [Google Scholar] [CrossRef]
- Andreu-Perez, J.; Cao, F.; Yang, G.-Z. A self-adaptive online brain-machine interface of a humanoid robot through a general type-2 fuzzy inference system. IEEE Trans. Fuzzy Syst. 2018, 26, 101–116. [Google Scholar] [CrossRef]
- Chaoui, H.; Guaeaieb, W.; Biglarbegian, M.; Yagoub, M.C.E. Computationally efficient adaptive type-2 fuzzy control of flexible-joint manipulators. Robotics 2013, 2, 66–91. [Google Scholar] [CrossRef]
- Biglarbegian, M.; Melek, W.W.; Mendel, J.M. Design of novel interval type-2 fuzzy controllers for modular and reconfigurable robots: Theory and experiments. IEEE Trans. Ind. Electron. 2011, 58, 1371–1384. [Google Scholar] [CrossRef]
- Castillo, O.; Amador-Angulo, L.; Castro, J.R.; Garcia-Valdez, M. A comparative study of type-1 fuzzy logic systems and generalized type-2 fuzzy logic system in control problems. Inf. Sci. 2016, 354, 257–274. [Google Scholar] [CrossRef]
- Cazarez-Castro, N.R.; Aguilar, L.T.; Castillo, O. Designing type-1 and type-2 fuzzy lyapunov synthesis for nonsmooth mechanical systems. Eng. Appl. Artif. Intell. 2012, 25, 971–979. [Google Scholar] [CrossRef]
- Ding, S.; Huang, X.; Ban, X.; Lu, H.; Zhang, H. Type-2 fuzzy logic for underactuated truss-like robotic finger with comparison of type-1 case1. J. Intell. Fuzzy Syst. 2017, 33, 2047–2057. [Google Scholar] [CrossRef]
- Alonge, F.; Cirrincoine, M.; D’lppolito, F.; Pucci, M.; Sferlazza, A. Robust active disturbance rejection control of induction motor systems based on additional sliding mode component. IEEE Trans. Ind. Electron. 2017, 64, 5608–5621. [Google Scholar] [CrossRef]
- Kim, N.; Park, Y.; Son, J.E.; Shin, S.; Min, B.; Park, H.; Kang, S.; Hur, H.; Ha, M.Y.H.; Lee, M.C. Robust sliding mode of a vapor compression cycle. Int. J. Control Autom. Syst. 2018, 16, 62–78. [Google Scholar] [CrossRef]
- Shah, A.; Huang, D.; Chen, Y.; Kang, X.; Qin, A. Robust sliding mode control of air handling unit for energy efficiency enhancement. Energies 2017, 10, 1815. [Google Scholar] [CrossRef]
- Levant, A. Chattering analysis. IEEE Trans. Autom. Control 2010, 55, 1380–1389. [Google Scholar] [CrossRef]
- Suryawanshi, P.V.; Shendge, P.D.; Phadke, S.B. A boundary layer sliding mode control design for chatter reduction using uncertainty and disturbance estimator. Int. J. Dyn. Control 2016, 4, 456–465. [Google Scholar] [CrossRef]
- Goel, A.; Swarup, A. Chattering free trajectory tracking control of a robotic manipulator using high order sliding mode. Adv. Comput. Comput. Sci. 2017, 553, 753–761. [Google Scholar] [CrossRef]
- Zhang, X.; Yin, C.; Bai, H. Fixed-boundary-layer sliding-mode and variable switching frequency control for a bidirectional DC-DC converter in hybrid energy storage system. Electr. Power Compon. Syst. 2017, 45, 1474–1485. [Google Scholar] [CrossRef]
- Levant, A. Principles of 2-sliding mode design. Automatica 2007, 43, 576–586. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, R.; Xue, T.; Liu, Z.; Yao, Z. An analysis of the stability and chattering reduction of high-order sliding mode tracking control for a hypersonic vehicle. Inf. Sci. 2016, 348, 25–48. [Google Scholar] [CrossRef]
- Mu, K.; Liu, C.; Peng, J. Robust tracking control for robot manipulator via fuzzy logic system and H∞ approaches. J. Control Sci. Eng. 2015, 2015, 459431. [Google Scholar] [CrossRef]
- Chettouh, M.; Toumi, R.; Hamerlin, M. High-order sliding modes for a robot driven by pneumatic artificial rubber muscles. Adv. Robot. 2012, 22, 689–704. [Google Scholar] [CrossRef]
- Jeong, C.-S.; Kim, J.-S.; Han, S.-I. Tracking error constrained super-twisting sliding mode control for robotic systems. Int. J. Control Autom. Syst. 2018, 16, 804–814. [Google Scholar] [CrossRef]
- Nagesh, I.; Edwards, C. A multivariable super-twisting sliding mode approach. Automatica 2014, 50, 984–988. [Google Scholar] [CrossRef]
- Darfa, L.; Benallegue, A.; Fridman, L. Super twisting algorithm for attitude tracking of four rotors UAV. J. Frankl. Inst. 2012, 349, 685–699. [Google Scholar] [CrossRef]
- Levant, A. Sliding order and sliding accuracy in sliding mode control. Int. J. Control 1993, 58, 1247–1263. [Google Scholar] [CrossRef]
- Yen, V.T.; Nan, W.Y.; Cuong, P.V.; Quynh, N.X.; Thich, V.H. Robust adaptive sliding mode control for industrial robot manipulator using fuzzy wavelet neural networks. Int. J. Control Autom. Syst. 2017, 15, 2930–2941. [Google Scholar] [CrossRef]
- Kapoor, N.; Ohri, J. Sliding mode control (SMC) of robot manipulator via intelligent controllers. J. Inst. Eng. Ser. B 2017, 98, 83–98. [Google Scholar] [CrossRef]
- Feng, J.; Gao, Q.; Guan, W.; Huang, X. Fuzzy sliding mode control for erection mechanism with unmodelled dynamics. Autom. J. Control Meas. Electron. Comput. Commun. 2017, 58, 131–140. [Google Scholar] [CrossRef]
- Soltanpour, M.R.; Khooban, M.H.; Soltani, M. Robust fuzzy sliding mode control for tracking the robot manipulator in joint space and in presence of uncertainties. Robotica 2014, 32, 433–446. [Google Scholar] [CrossRef]
- Zi, B.; Sun, H.; Zhang, D. Design, analysis and control of a winding hybrid-driven cable parallel manipulator. Robot. Comput. Integr. Manuf. 2017, 48, 196–208. [Google Scholar] [CrossRef]
- Yu, J.; Liu, J.; Wu, Z.; Fang, H. Depth control of a bioinspired robotic dolphin based on sliding-mode fuzzy control method. IEEE Trans. Ind. Electron. 2018, 65, 2429–2438. [Google Scholar] [CrossRef]
- Hwang, C.-L.; Yang, C.-C.; Huang, J.Y. Path tracking of an autonomous ground vehicle with different payloads by hierarchical improved fuzzy dynamic sliding-mode control. IEEE Trans. Fuzzy Syst. 2018, 26, 899–914. [Google Scholar] [CrossRef]
- John, R.I.B.; Mendel, J.M. Type-2 fuzzy sets made simple. IEEE Trans. Fuzzy Syst. 2002, 10, 117–127. [Google Scholar] [CrossRef]
- Mendel, J.M. Uncertain Rule-Based Fuzzy Logic Systems: Introduction and New Directions; Prentice-Hall PTR: Upper Saddle River, NJ, USA, 2001. [Google Scholar]
- Wu, D.; Mendel, J.M. Enhanced Karnik-Mendel algorithms. IEEE Trans. Fuzzy Syst. 2009, 17, 923–934. [Google Scholar] [CrossRef]
- Slotine, J.J.; Sastry, S.S. Tracking control of non-linear systems using sliding surfaces, with application to robot manipulators. Int. J. Control 2007, 38, 465–492. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | AIT2-FSMC | AFSOST-SMC |
|---|---|---|
| 6 | 6 | |
| 14 | 14 | |
| - | 5 | |
| - | 2 | |
| - | 10 | |
| - | 12 | |
| 800 | 20 | |
| 110 | - | |
| - | ||
| 24 | - | |
| 0.1 | - | |
| 0.1 | - |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nafia, N.; El Kari, A.; Ayad, H.; Mjahed, M. Robust Interval Type-2 Fuzzy Sliding Mode Control Design for Robot Manipulators. Robotics 2018, 7, 40. https://doi.org/10.3390/robotics7030040
Nafia N, El Kari A, Ayad H, Mjahed M. Robust Interval Type-2 Fuzzy Sliding Mode Control Design for Robot Manipulators. Robotics. 2018; 7(3):40. https://doi.org/10.3390/robotics7030040
Chicago/Turabian StyleNafia, Nabil, Abdeljalil El Kari, Hassan Ayad, and Mostafa Mjahed. 2018. "Robust Interval Type-2 Fuzzy Sliding Mode Control Design for Robot Manipulators" Robotics 7, no. 3: 40. https://doi.org/10.3390/robotics7030040
APA StyleNafia, N., El Kari, A., Ayad, H., & Mjahed, M. (2018). Robust Interval Type-2 Fuzzy Sliding Mode Control Design for Robot Manipulators. Robotics, 7(3), 40. https://doi.org/10.3390/robotics7030040