
Underwater Polarized Light Navigation: Current Progress, Key Challenges, and Future Perspectives



Abstract
1. Introduction
2. Atmospheric Polarization Navigation Technology
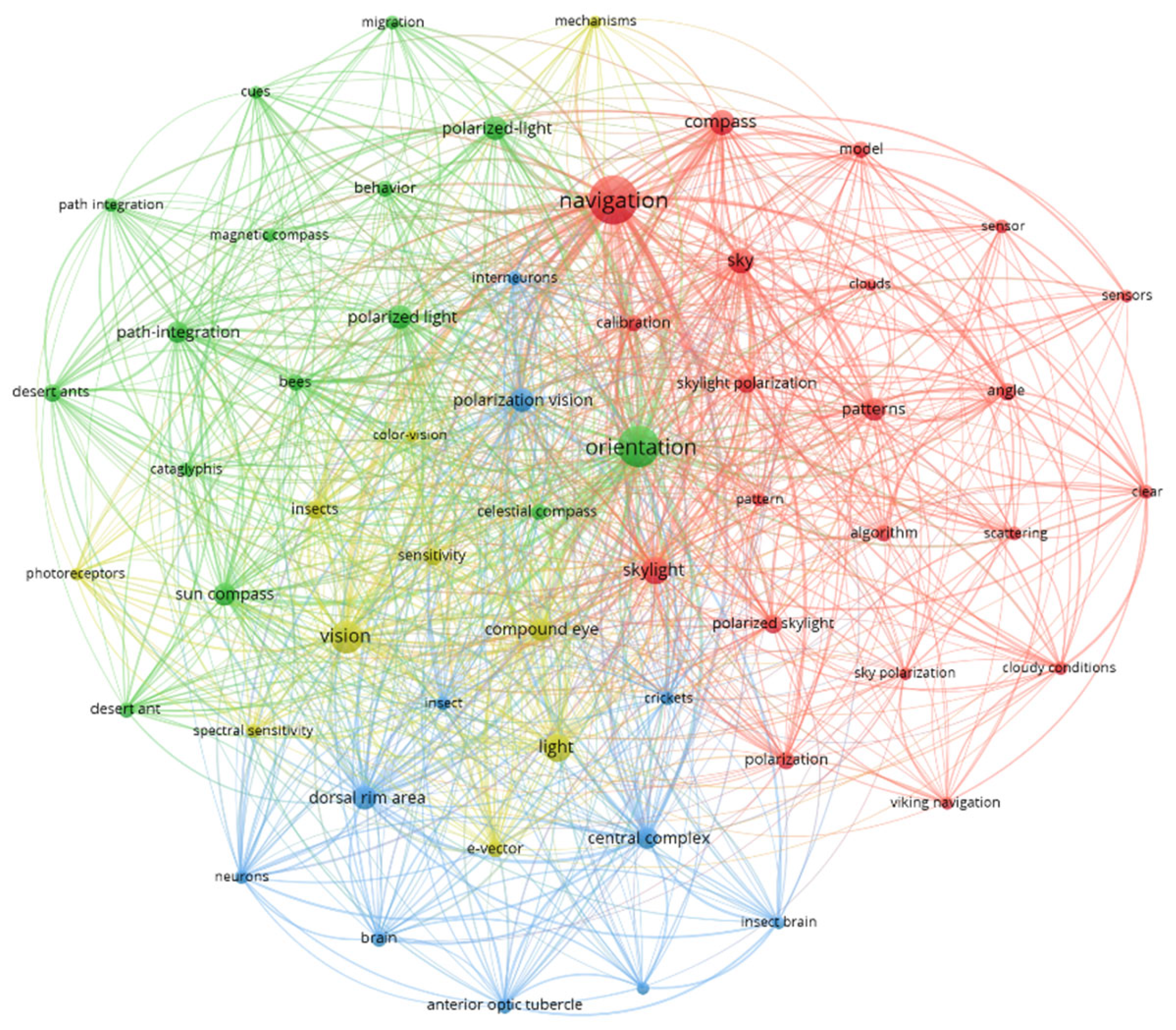
- Navigation and Compass Systems (red cluster, 21 nodes): Centered on navigation and compass, this cluster integrates high-frequency terms such as skylight, sensors, and patterns, reflecting methodologies for celestial orientation and terrestrial navigation.
- Polarized Light Navigation Technology (green cluster, 15 nodes): Focused on orientation and polarized light, key terms like path integration, celestial compass, and sun compass emphasize adaptive strategies for dynamic environmental navigation.
- Polarized Light Sensing Mechanisms (yellow cluster, 10 nodes): Bridging hardware and biological principles, this cluster features vision, compound eye, and light, with subthemes including photoreceptors, sensitivity, and sensor mechanisms.
- Polarization Vision Processing (blue cluster, 11 nodes): Highlighting neural and anatomical adaptations, terms such as dorsal rim area (a specialized region in insect eyes for polarization detection), neurons, and brain underscore post-sensory processing in biological polarization perception.
2.1. Point Source Polarization Navigation Technology
- Coarse Solar Meridian Detection: The stepper motor rotates the gear to maximize the logarithmic ratio of photodiode outputs, aligning the device with either 0° or 180° solar meridian orientations.
- Fine Heading Resolution: The absolute azimuth (0° vs. 180°) is determined by comparing individual photodiode outputs ( and ) under static conditions.

2.2. Global Polarization Positioning Technology
- Time-sharing imaging systems: Capture polarization states sequentially through rotating polarizers or liquid crystal modulators.
- Real-time imaging systems: Instantaneously resolve polarization parameters through optical configurations, further classified as follows: Amplitude division: Splits light intensity across multiple polarization channels (e.g., beam splitters); Aperture division: Utilizes spatially separated polarizers within a single optical path; Focal plane division: Integrates micro-polarizer arrays directly onto the sensor focal plane.
- Symmetry axis extraction: Identifies solar/anti-solar meridians from the symmetric distribution of atmospheric polarization patterns.
- E-vector orthogonality: Exploits the perpendicular relationship between polarization vectors and solar azimuth.
- Zhang et al. [31] employed a modified UNet architecture for robust sky segmentation, enabling solar vector estimation with 0.42° RMSE in azimuth under cloudy conditions.
- Fan et al. [32] introduced the Model Consistency of Polarization Patterns (MCOPP) method, achieving static accuracy better than 0.5° and maintaining 0.7° precision in dynamic vehicle tests.
- Zhao et al. [33] addressed dynamic environment challenges through GRU-based error modeling, reducing heading RMSE to 0.5218° despite vehicle motion.
- Zhou et al. [34] combined Snake Optimization with Otsu thresholding to effectively handle occlusions in polarization images.
2.3. Multi-Sensor Positioning Technology Integrating Polarization Vision
- Initialization and Sensor Fusion Techniques
- 2.
- Precision Enhancement Methods
- 3.
- Multi-Sensor Navigation Systems
3. Underwater Polarization Navigation Technology
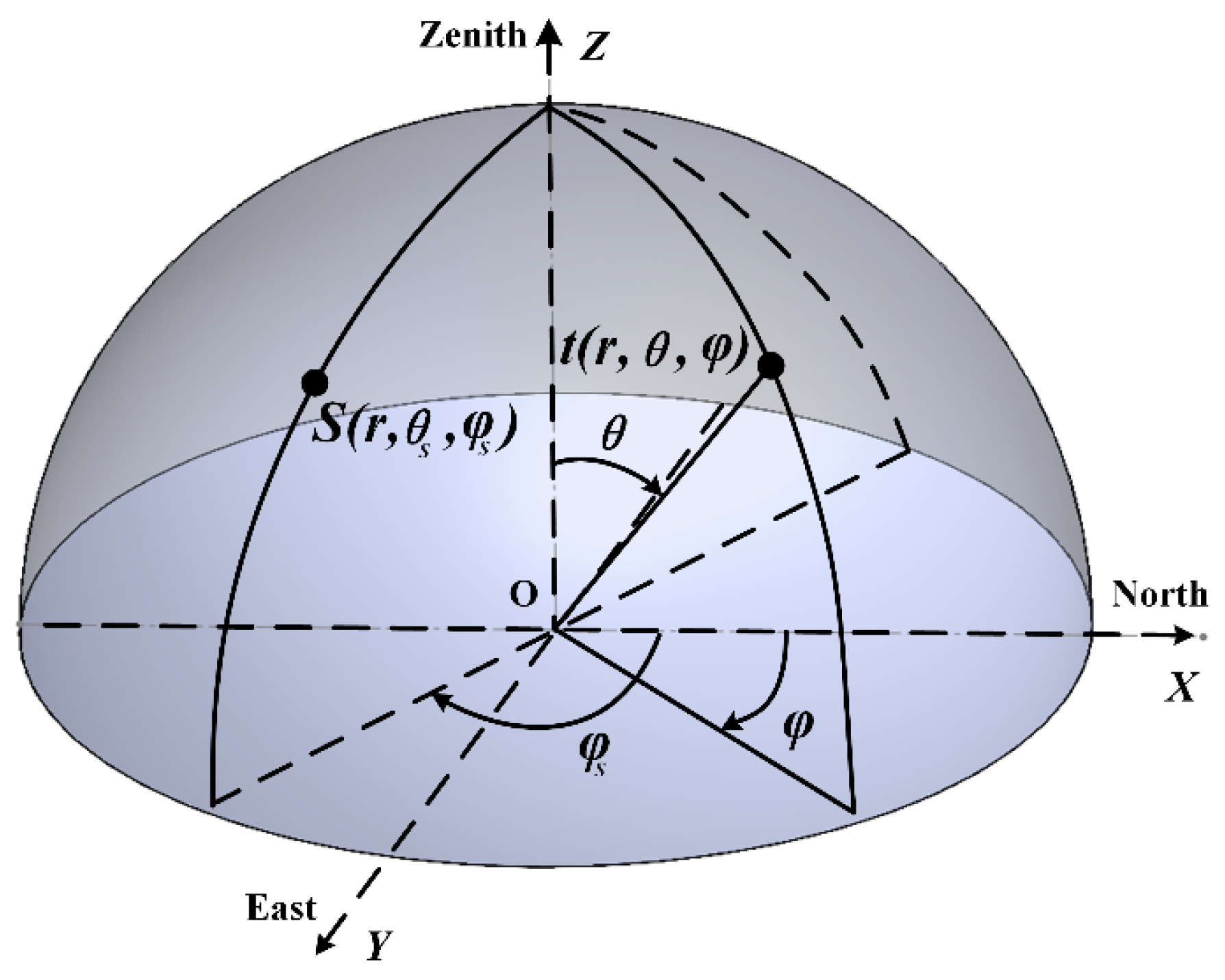
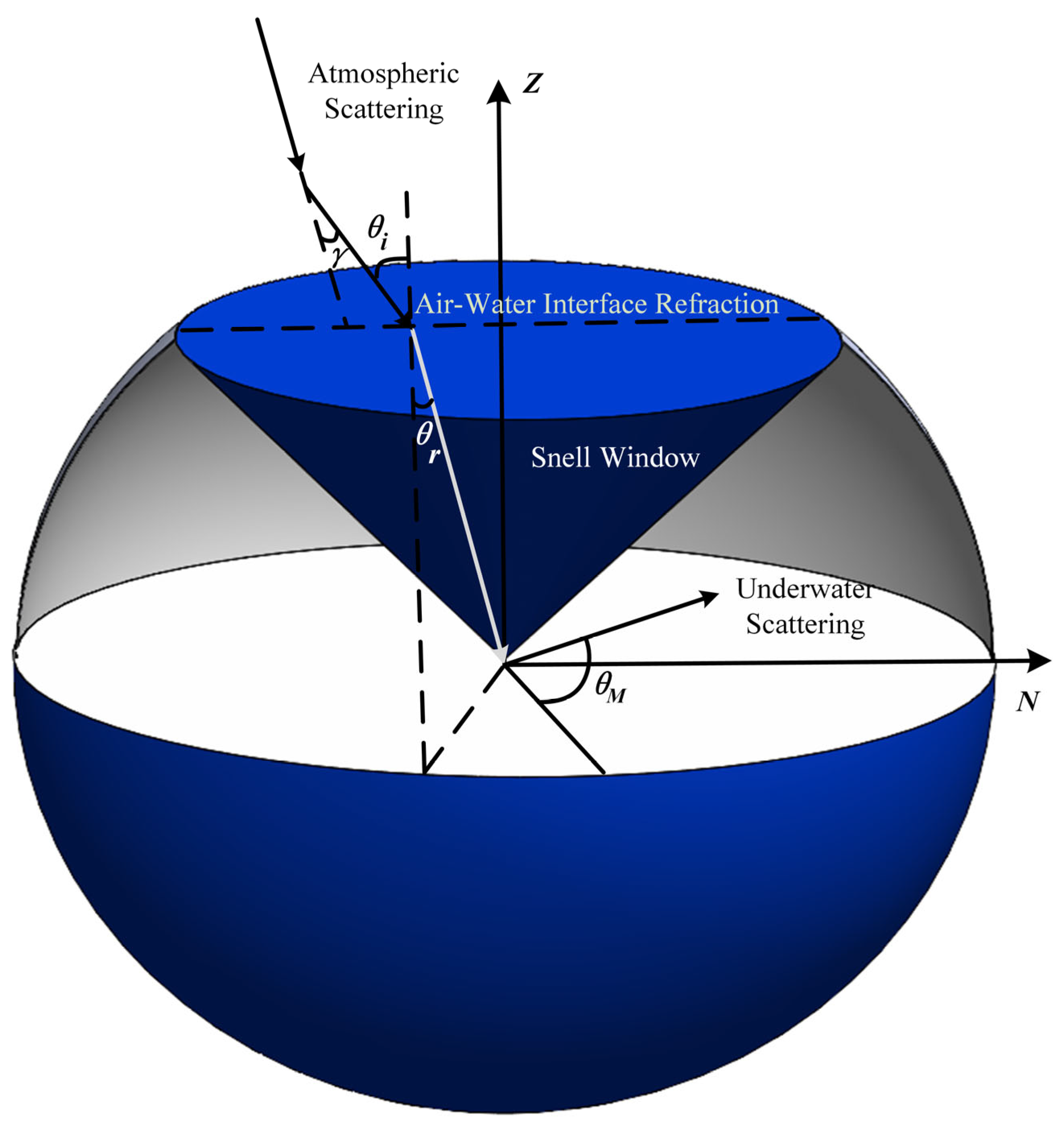
3.1. Modeling of Underwater Polarized Light Patterns
3.2. Research Status and Analysis
- Challenges in Accurate Modeling of Cross-Media Underwater Polarized Light Patterns
- 2.
- High Noise Interference in Underwater Polarized Light Fields
4. Conclusions and Future Research Directions
- Inadequate modeling of underwater polarization patterns: Current models predominantly rely on idealized physical assumptions, failing to systematically address dynamic interference from surface waves and particle scattering in complex underwater environments. This limitation stems from insufficient integration of real-world noise characteristics and environmental variability into polarization pattern modeling.
- Technical constraints in underwater polarization navigation: Single-mode polarization-based navigation systems exhibit insufficient performance in positioning accuracy and robustness, primarily functioning for heading acquisition. In complex environments subject to disturbances such as wave interference, navigation reliability becomes significantly compromised. Furthermore, existing research predominantly focuses on laboratory settings or shallow-water scenarios, with limited exploration into deep-water environments and multi-interference conditions. This deficiency results in inadequate adaptability to practical operational requirements.
- Inadequate Multi-Sensor Fusion Technology for Underwater Bio-Inspired Polarization Positioning: Research on multi-sensor integration remains scarce in subaquatic environments, with particularly insufficient exploration in combining acoustic imaging, polarized light, and inertial measurement unit (IMU) data. There is a critical absence of universally applicable and robust fusion frameworks. Furthermore, existing approaches fail to address the distinctive challenges of underwater scenarios, such as low visibility conditions and high-noise interference environments. These technical gaps significantly hinder practical implementation across complex settings.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Patil, A.; Park, M.; Bae, J. Coordinating Tethered Autonomous Underwater Vehicles towards Entanglement-Free Navigation. Robotics 2023, 12, 85. [Google Scholar] [CrossRef]
- Xing, G.; Li, D.; Sui, Y.; Yang, W.; Shen, Y. Analysis of the Current Development Status of Overseas Underwater Navigation Technologies. Aerosp. Technol. 2021, 5, 80–84. [Google Scholar]
- Zhang, B.; Ji, D.; Liu, S.; Zhu, X.; Xu, W. Autonomous Underwater Vehicle navigation: A review. Ocean. Eng. 2023, 273, 113861. [Google Scholar] [CrossRef]
- Alexandris, C.; Papageorgas, P.; Piromalis, D. Positioning Systems for Unmanned Underwater Vehicles: A Comprehensive Review. Appl. Sci. 2024, 14, 9671. [Google Scholar] [CrossRef]
- Liu, J.; Yu, F.; He, B.; Soares, C. A review of underwater docking and charging technology for autonomous vehicles. Ocean Eng. 2024, 297, 117154. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, T.; Wei, H. A Single Source-Aided Inertial Integrated Navigation Scheme for Passive Navigation of Autonomous Underwater Vehicles. IEEE Sens. J. 2024, 24, 11237–11245. [Google Scholar] [CrossRef]
- Yang, K.; Zhang, Z.; Cui, R.; Yan, W. Acoustic-optic assisted multisensor navigation for autonomous underwater vehicles. Ocean Eng. 2024, 297, 117139. [Google Scholar] [CrossRef]
- Long, J.; Zhao, J.; Zhao, X.; Jin, C. Underwater terrain matching method based on multibeam bathymetric point cloud descriptors. Int. J. Digit. Earth 2024, 17, 2434655. [Google Scholar] [CrossRef]
- Melo, J.; Matos, A. Survey on advances on terrain based navigation for autonomous underwater vehicles. Ocean. Eng. 2017, 139, 250–264. [Google Scholar] [CrossRef]
- Wu, H.; Chen, Y.; Yang, Q.; Yan, B.; Yang, X. A Review of Underwater Robot Localization in Confined Spaces. J. Mar. Sci. Eng. 2024, 12, 428. [Google Scholar] [CrossRef]
- Ma, K.; Ding, S.; Li, Y.; Fan, J. A review of terrain aided navigation for underwater vehicles. Ocean. Eng. 2023, 281, 114779. [Google Scholar] [CrossRef]
- Cartron, L.; Darmaillacq, A.S.; Jozet-Alves, C.; Shashar, N.; Dickel, L. Cuttlefish rely on both polarized light and landmarks for orientation. Anim. Cogn. 2012, 15, 591–596. [Google Scholar] [CrossRef] [PubMed]
- Zhang, T.; Yang, J.; Guo, L.; Hu, P.; Liu, X.; Huang, P.; Wang, C. A bionic point-source polarisation sensor applied to underwater orientation. J. Navig. 2021, 74, 1057–1072. [Google Scholar] [CrossRef]
- Parkyn, D.; James, D.; Hawryshyn, C. Acquisition of polarized-light orientation in salmonids under laboratory conditions. Anim. Behav. 2003, 65, 893–904. [Google Scholar] [CrossRef]
- Cronin, T.; Shashar, N. The linearly polarized light field in clear, tropical marine waters: Spatial and temporal variation of light intensity, degree of polarization and e-vector angle. J. Exp. Biol. 2001, 204, 2461–2467. [Google Scholar] [CrossRef]
- Horváth, G.; Varjú, D. Polarised Light in Animal Vision; Springer: Berlin/Heidelberg, Germany; New York, NY, USA, 2004. [Google Scholar]
- Chu, J.; Zhao, K.; Zhang, Q.; Wang, T. Construction and performance test of a novel polarization sensor for navigation. Sens. Actuators A Phys. 2008, 148, 75–82. [Google Scholar] [CrossRef]
- Wang, D.; Liang, H.; Zhu, H.; Zhang, S. A bionic camera-based polarization navigation sensor. Sensors 2014, 14, 13006–13023. [Google Scholar] [CrossRef]
- Dupeyroux, J.; Viollet, S.; Serres, J. Polarized skylight-based heading measurements: A bio-inspired approach. J. R. Soc. Interface 2019, 16, 20180878. [Google Scholar] [CrossRef]
- Dupeyroux, J.; Viollet, S.; Serres, J. An ant-inspired celestial compass applied to autonomous outdoor robot navigation. Robot. Auton. Syst. 2019, 117, 40–56. [Google Scholar] [CrossRef]
- Dupeyroux, J.; Serres, J.; Viollet, S. AntBot: A six-legged walking robot able to home like desert ants in outdoor environments. Sci. Robot. 2019, 4, eaau0307. [Google Scholar] [CrossRef]
- Yang, J.; Liu, X.; Zhang, Q.; Du, T.; Guo, L. Global autonomous positioning in GNSS-challenged environments: A bioinspired strategy by polarization pattern. IEEE Trans. Ind. Electron. 2020, 68, 6308–6317. [Google Scholar] [CrossRef]
- Wang, Y.; Chu, J.; Zhang, R.; Wang, L.; Wang, Z. A novel autonomous real-time position method based on polarized light and geomagnetic field. Sci. Rep. 2015, 5, 9725. [Google Scholar] [CrossRef] [PubMed]
- Powell, S.; Garnett, R.; Marshall, J.; Rizk, C.; Gruev, V. Bioinspired polarization vision enables underwater geolocalization. Sci. Adv. 2018, 4, eaao6841. [Google Scholar] [CrossRef] [PubMed]
- Bai, X.; Liang, Z.; Zhu, Z.; Schwing, A.; Forsyth, D.; Gruev, V. Polarization-based underwater geolocalization with deep learning. eLight 2023, 3, 15. [Google Scholar] [CrossRef]
- Bai, X.; Zhu, Z.; Schwing, A.; Schwing, A.; Forsyth, D.; Gruev, V. Learning a global underwater geolocalization model with sectoral transformer. Opt. Express 2024, 32, 20706–20718. [Google Scholar] [CrossRef]
- Tang, J.; Zhang, N.; Li, D.; Wang, F.; Zhang, B.; Wang, C.; Shen, C.; Ren, J.; Xue, C.; Liu, J. Novel robust skylight compass method based on full-sky polarization imaging under harsh conditions. Opt. Express 2016, 24, 15834–15844. [Google Scholar] [CrossRef]
- Wan, Z.; Zhao, K.; Chu, J. Robust azimuth measurement method based on polarimetric imaging for bionic polarization navigation. IEEE Trans. Instrum. Meas. 2019, 69, 5684–5692. [Google Scholar] [CrossRef]
- Wang, Y.; Hu, X.; Lian, J.; Zhang, L.; He, X. Bionic orientation and visual enhancement with a novel polarization camera. IEEE Sens. J. 2017, 17, 1316–1324. [Google Scholar] [CrossRef]
- Wang, Y.; Hu, X.; Zhang, L.; Lian, J.; He, X. Polarized light compass-aided visual-inertial navigation under foliage environment. IEEE Sens. J. 2017, 17, 5646–5653. [Google Scholar] [CrossRef]
- Zhang, R.; Cai, H.; Guan, L.; Wan, Z.; Chen, Y.; Fan, Y.; Chu, J. Polarization orientation method for cloudy sky. Opt. Precis. Eng. 2021, 29, 1499–1510. [Google Scholar] [CrossRef]
- Fan, C.; Zhou, Z.; He, X.; Fan, Y.; Zhang, L.; Wu, X. Bio-inspired multisensor navigation system based on the skylight compass and visual place recognition for unmanned aerial vehicles. IEEE Sens. J. 2022, 22, 15419–15428. [Google Scholar] [CrossRef]
- Zhao, D.; Liu, Y.; Wu, X.; Dong, H.; Wang, C.; Tang, J.; Shen, C.; Liu, J. Attitude-Induced error modeling and compensation with GRU networks for the polarization compass during UAV orientation. Measurement 2022, 190, 110734. [Google Scholar] [CrossRef]
- Zhou, Y.; Ye, C.; Lin, Z.; Zhan, C.; Gao, H. Self-Adaptive Image Segmentation Algorithm for Polarization Navigation under Complex Scenes. Acta Opt. Sin. 2024, 44, 1910002. [Google Scholar]
- Yang, J.; Wang, M.; Liu, S.; Liang, L.; Liu, Z.; Guo, Y. Detection method of solar position using a biomimetic polarized light compass. Chin. Opt. 2024, 17, 548–559. [Google Scholar] [CrossRef]
- Cai, J.; Cheng, J.; Liu, J.; Wang, Z.; Xu, Y. A polar rapid transfer alignment assisted by the improved polarized-light navigation. IEEE Sens. J. 2021, 22, 2508–2517. [Google Scholar] [CrossRef]
- Li, J.; Chu, J.; Zhi, W.; Wu, J.; Zhang, R. Integrated Navigation System Based on Polarization Sensor in Small UAVs. In Proceedings of the 2021 International Conference on Autonomous Unmanned Systems (ICAUS 2021), Changsha, China, 24–26 September 2021. [Google Scholar]
- Hu, P.; Huang, P.; Qiu, Z.; Yang, J.; Liu, X. A 3D attitude estimation method based on attitude angular partial feedback for polarization-based integrated navigation system. Sensors 2022, 22, 710. [Google Scholar] [CrossRef]
- Zhi, W.; Chu, J.; Li, J.; Wang, Y. A novel attitude determination system aided by polarization sensor. Sensors 2018, 18, 158. [Google Scholar] [CrossRef]
- Du, T.; Tian, C.; Yang, J.; Wang, S.; Liu, X.; Guo, L. An autonomous initial alignment and observability analysis for SINS with bio-inspired polarized skylight sensors. IEEE Sens. J. 2020, 20, 7941–7956. [Google Scholar] [CrossRef]
- Yang, J.; Du, T.; Liu, X.; Niu, B.; Guo, L. Method and implementation of a bioinspired polarization-based attitude and heading reference system by integration of polarization compass and inertial sensors. IEEE Trans. Ind. Electron. 2019, 67, 9802–9812. [Google Scholar] [CrossRef]
- Wang, S.; Qiu, Z.; Huang, P.; Yu, X.; Yang, J.; Guo, L. A bioinspired navigation system for multirotor UAV by integrating polarization compass/magnetometer/INS/GNSS. IEEE Trans. Ind. Electron. 2022, 70, 8526–8536. [Google Scholar] [CrossRef]
- Fan, C.; Hu, X.; He, X.; Zhang, L.; Lian, J. Integrated polarized skylight sensor and MIMU with a metric map for urban ground navigation. IEEE Sens. J. 2017, 18, 1714–1722. [Google Scholar] [CrossRef]
- Fan, C.; Hu, X.; He, X.; Zhang, L.; Wang, Y. Multicamera polarized vision for the orientation with the skylight polarization patterns. Opt. Eng. 2018, 57, 1. [Google Scholar] [CrossRef]
- Zhou, W.; Fan, C.; He, X.; Hu, X.; Fan, Y.; Wu, X. Integrated bionic polarized vision/vins for goal-directed navigation and homing in unmanned ground vehicle. IEEE Sens. J. 2021, 21, 11232–11241. [Google Scholar] [CrossRef]
- Fan, Y.; Fan, C.; He, X.; Hu, X.; Zhou, W.; Wu, X. Bionic polarized skylight orientation method based on the model consistency of polarization patterns in cloudy weather. IEEE Sens. J. 2022, 22, 19455–19465. [Google Scholar] [CrossRef]
- Guo, Y.; Li, G.; Li, X.; Kong, F.; Lv, W. Research advances in bionic polarized light navigation technology. In Proceedings of the Second International Conference on Electronic Information Technology (EIT 2023), Wuhan, China, 17–19 March 2023. [Google Scholar]
- Wu, X.; Shen, C.; Cao, H.; Wang, C.; Tang, J.; Liu, J. Survey of underwater biomimetic polarization and geomagnetic navigation technology. Tactical Missile Technol. 2023, 4, 13–25. [Google Scholar]
- Lerner, A.; Sabbah, S.; Erlick, C.; Shashar, N. Navigation by light polarization in clear and turbid waters. Philos. Trans. R. Soc. B Biol. Sci. 2011, 366, 671–679. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, Y.; Huang, A.; Hu, X. Effect of underwater suspended particles on the transmission characteristics of polarized lasers. J. Opt. Soc. Am. A 2018, 36, 61–70. [Google Scholar] [CrossRef]
- Cheng, H.; Chu, J.; Zhang, R.; Tian, L.; Gui, X. Underwater polarization patterns considering single Rayleigh scattering of water molecules. Int. J. Remote Sens. 2020, 41, 4947–4962. [Google Scholar] [CrossRef]
- Cheng, H.; Chu, J.; Zhang, R.; Zhang, P. Simulation and measurement of the effect of various factors on underwater polarization patterns. Optik 2021, 237, 166637. [Google Scholar] [CrossRef]
- Cheng, H.; Guo, X.; Bai, H.; Li, G.; Su, C. The Research on Ocean Polarized Light Fields at Different Depths for Polarization Navigation. IEEE Access 2023, 11, 137702–137708. [Google Scholar] [CrossRef]
- Gu, J.; Li, G.; Hu, P.; Qian, J. The polarization mode of underwater waves based on atmospheric multiple scattering. Chin. Opt. 2023, 16, 1324–1332. [Google Scholar] [CrossRef]
- Wang, G.; Liu, X.; Wan, J.; Mo, J. Research on underwater polarization light navigation. Ship Sci. Technol. 2011, 33, 79–82. [Google Scholar]
- Hu, P.; Yang, J.; Guo, L.; Yu, X.; Li, W. Solar-tracking methodology based on refraction-polarization in Snell’s window for underwater navigation. Chin. J. Aeronaut. 2022, 35, 380–389. [Google Scholar] [CrossRef]
- Cheng, H.; Chen, Q.; Zeng, X.; Yuan, H.; Zhang, L. The polarized light field enables underwater unmanned vehicle bionic autonomous navigation and automatic control. J. Mar. Sci. Eng. 2023, 11, 1603. [Google Scholar] [CrossRef]
- Li, G.; Zhang, Y.; Fan, S.; Yu, F.; Wang, Y. Dynamic-wave interference suppression based on angular increment assistance for underwater Imaging Polarization Sensor. IEEE Trans. Instrum. Meas. 2024, 74, 5001713. [Google Scholar] [CrossRef]
- Xu, Z.; Wang, Z. Recent advances and future trends in foreign underwater navigation techniques. Ship Sci. Technol. 2013, 35, 154–157. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Theoretical Basis | Advantages | Limitations |
|---|---|---|---|
| Point source polarization navigation | The zenith polarization angle maintains a perpendicular relationship (±90°) with the solar meridian [17] | Bioinspired sensor design, Minimal hardware complexity | 180° directional ambiguity; Occlusion vulnerability; Tilt-induced zenith measurement failure |
| Orthogonal polarizers (0°/90°) for solar meridian detection [19,20,21] | Omnidirectional capability | Gear-limited angular resolution; Local measurement constraints | |
| Multi-point observation [22,23] | Direct geolocation from initial coordinates | Significant geodetic error; Environmental occlusion sensitivity | |
| Global Polarization Navigation | Symmetry axis extraction [27,28] | Simple implementation; Direct pattern analysis | Noise sensitivity; Limited environmental adaptability |
| E-vector orthogonality to solar vector [13,29,30] | Robust to partial occlusions (clouds/foliage) | Motion artifact susceptibility; Device precision limitations | |
| Model-measurement error minimization [24,26] | Effective in obstructed environments; a hybrid physical-data approach | Positioning accuracy limitations; DL model interpretability challenges |
| Source | Environmental Conditions | Evaluation Metrics | Remark |
|---|---|---|---|
| Wang et al. [55] | / | No specific quantitative errors, mainly theoretical analysis | / |
| Hu et al. [56] | Depth: Shallow water (pool experiment, size 5 × 3 × 1.5 m3); Weather: Clear weather; Surface: Calm water. | Solar zenith angle RMSE: 0.3°; Solar azimuth angle RMSE: 1.3°. | Proposed a solar-tracking algorithm (RPA) based on refraction–polarization patterns in Snell’s window |
| Cheng et al. [57] | Depth: 1 m, 3 m, 5 m; Water quality: Pool (clean), actual underwater environment (poor water quality, with breeze causing waves); Scene: Static pool experiment, outdoor actual underwater dynamic navigation. | Pool experiment: Average error of course angle measurement 0.30°, polarization azimuth accuracy < 0.69°; At 5 m depth: Angle error MSE = 16.57°, SD = 4.07°; Positioning accuracy: 100 m navigation error < 5 m (within 5 m depth). | Developed a strapdown navigation method combining polarization and inertial information |
| Li et al. [58] | Depth: 30 cm (simulated underwater scene with acrylic container); Disturbance: Dynamic waves (amplitude 10 cm); Weather: Clear weather. | Static orientation error reduced by 26.3%; Dynamic orientation error reduced by 33.4%; AOP image: MSE, PSNR, SSIM improved. | Proposed a dynamic wave interference suppression method based on angular increment assistance |
| Powell et al. [24] | Depth: 2–20 m; Locations: Multiple global sites (Australia, USA, Finland, etc.); Time: From sunrise to sunset; Water quality: Clear to turbid waters. | Solar azimuth RMSE: 6.02° (after kNN correction); Solar elevation RMSE: 2.92° (after kNN correction); Positioning accuracy: Average 61 km, error 6 m per kilometer. | Realized underwater geolocalization based on bionic polarization vision, used kNN regression to correct residuals of single-scattering model |
| Bai et al. [25,26] | Locations: 4 global sites (USA, North Macedonia); Water quality: Freshwater lakes (visibility ~0.3 m, >10 m), seawater (0.5–3 m visibility); Season: Covering different seasons. | Daytime: The longitudinal accuracy can reach about 55 km (up to a depth of about 8 m, unaffected by water turbidity); At night: longitudinal accuracy of about 1000 km (depth up to about 8 m); Clear water domain (50 m depth): Transfer learning vertical accuracy of approximately 255 km. | Proposed a Transformer-based Sectoral Transformer model, combined with UKF to achieve learning-free temporal modeling |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, M.; Liu, Y.; Zhu, D.; Pang, W.; Zhu, J. Underwater Polarized Light Navigation: Current Progress, Key Challenges, and Future Perspectives. Robotics 2025, 14, 104. https://doi.org/10.3390/robotics14080104
Chen M, Liu Y, Zhu D, Pang W, Zhu J. Underwater Polarized Light Navigation: Current Progress, Key Challenges, and Future Perspectives. Robotics. 2025; 14(8):104. https://doi.org/10.3390/robotics14080104
Chicago/Turabian StyleChen, Mingzhi, Yuan Liu, Daqi Zhu, Wen Pang, and Jianmin Zhu. 2025. "Underwater Polarized Light Navigation: Current Progress, Key Challenges, and Future Perspectives" Robotics 14, no. 8: 104. https://doi.org/10.3390/robotics14080104
APA StyleChen, M., Liu, Y., Zhu, D., Pang, W., & Zhu, J. (2025). Underwater Polarized Light Navigation: Current Progress, Key Challenges, and Future Perspectives. Robotics, 14(8), 104. https://doi.org/10.3390/robotics14080104