1. Introduction
The increasing digitalization and automation of production systems has led to far-reaching changes in industrial processes in recent years. The use of telepresence systems (TPSs), which enable specialist personnel to intervene in work processes from remote locations, is gaining increasing attention. Telepresence can be facilitated through a diverse array of technological devices—encompassing basic video telecommunication systems to advanced augmented reality (AR) glasses and sophisticated telepresence robots. Telepresence robots are remote-controlled devices equipped with videoconferencing technology, allowing users to maintain a virtual presence in a distant location [
1]. Telepresence robots offer several advantages over traditional methods like video calls or AR glasses: telepresence robots provide a more immersive, lifelike experience, allowing the remote participant to navigate in the distant location and engage naturally with the environment. They enable real-time presence, offering better spatial awareness and, depending on the model, the ability to physically move and interact with objects, which is particularly beneficial for tasks requiring hands-on assistance. Additionally, telepresence robots offer a greater sense of embodiment and social presence, making remote collaboration more intuitive and effective [
2]. Although this technology is already being used in areas such as medicine [
3] and education [
4], its use in industrial settings is still limited. The reasons for this are complex and range from technical hurdles and a lack of standards to economic and organizational challenges. In addition, the question of possible deployment areas and tasks for the TPS prevails. In the following text, the term TPS is used in general and thus includes telepresence robots.
For telepresence systems to be used effectively in production systems, it is crucial to clearly define the areas of application. Not all processes are equally suitable for the use of telepresence. The fields of application with a high degree of flexibility, fast decision-making, and a high degree of human interaction appear to be particularly useful. In maintenance and assembly, where complex assemblies with different parts and tools are often processed, telepresence offers the opportunity to make specialist knowledge available regardless of the experts’ current location. At the same time, it can help shorten the learning curve for less experienced employees by providing instructions and feedback in real time. To date, there is no known formal research for the application of TPSs in the field of industrial settings.
One key aspect that underlines the relevance of telepresence in production systems is the increasing shortage of skilled workers. In many industries, complex processes are carried out by workers who do not always have the necessary expertise. This can lead to errors, inefficient processes, and production downtime. Telepresence systems could play a crucial role here by enabling skilled personnel to monitor assembly processes remotely and instruct less qualified employees. This would not only improve the quality of processes but also ensure the availability of experts across regions.
An often underestimated but decisive factor for the success of telepresence systems is the design of the robots used. This might not only be associated with functionality and efficiency, but also with the perception, acceptance, and subsequent use by employees [
5,
6]. In production systems, where robots [
7] and telepresence robots are often integrated into complex, collaborative processes, the design needs to meet the specific requirements of the tasks. In functional terms, a telepresence robot should be able to move precisely and flexibly in a production environment. This includes not only navigating through dynamic work areas, but also interacting with tools, machines, and people. Ergonomic aspects play just as an important role as technological features, such as high-resolution cameras, intuitive controls, and real-time communication.
In addition to technical performance, the effect of the design on human interaction partners is of central importance. Research shows that the appearance and behavior of a robot can significantly influence cooperation and acceptance by humans [
8]. Robots in general can be ascribed both positive and negative human attributes [
9], which are associated with both the behavior of the robots and the design aspects [
5,
6]. For example, more human-like robots are perceived as more sociable, but less competent than less human-like robots [
10]. Schouten et al. [
2] showed that the use of a TPS led to more robot-like characteristics being attributed to the remote interaction partner. Therefore, it can be assumed that the design of the robot affects the evaluation of the remote assistant’s characteristics. A telepresence robot that is perceived as too mechanical or aloof could cause mistrust or apprehension. A human-like, empathetic design could help break down barriers and enable more effective collaboration. In addition to the social perception of the TPS, trust is also a key factor in human–robot collaboration. Various studies have been conducted to identify the factors that determine trust in robots, including studies by Bainbridge, et al. [
11] and Tsui, et al. [
12] who examined the influences of type, size, proximity, and behavior of the robot. In assembly, where clear communication and trust between those involved is essential, a telepresence robot that is designed accordingly could significantly improve collaboration. This is especially true in scenarios where skilled personnel give instructions remotely because the collaboration is relying on the interaction between the person on site and the remote personnel, with no in-person interaction taking place. Previous studies have thus shown that the design of a TPS has an effect on social perception. In previous studies, e.g., with videos [
13], it became clear that the context of the interaction with the TPS played a major role and that the parameters sociability/morality, activity/cooperation, competence, and anthropomorphism (included in the Social Perception of Robots Scale (SPRS) by Mandl, Bretschneider, Asbrock, Meyer, and Strobel [
10]) should be examined. Although anthropomorphism plays a more significant role in social contexts, it should also be investigated in industrial contexts to ensure a holistic examination of social factors and to allow for comparison with previous studies.
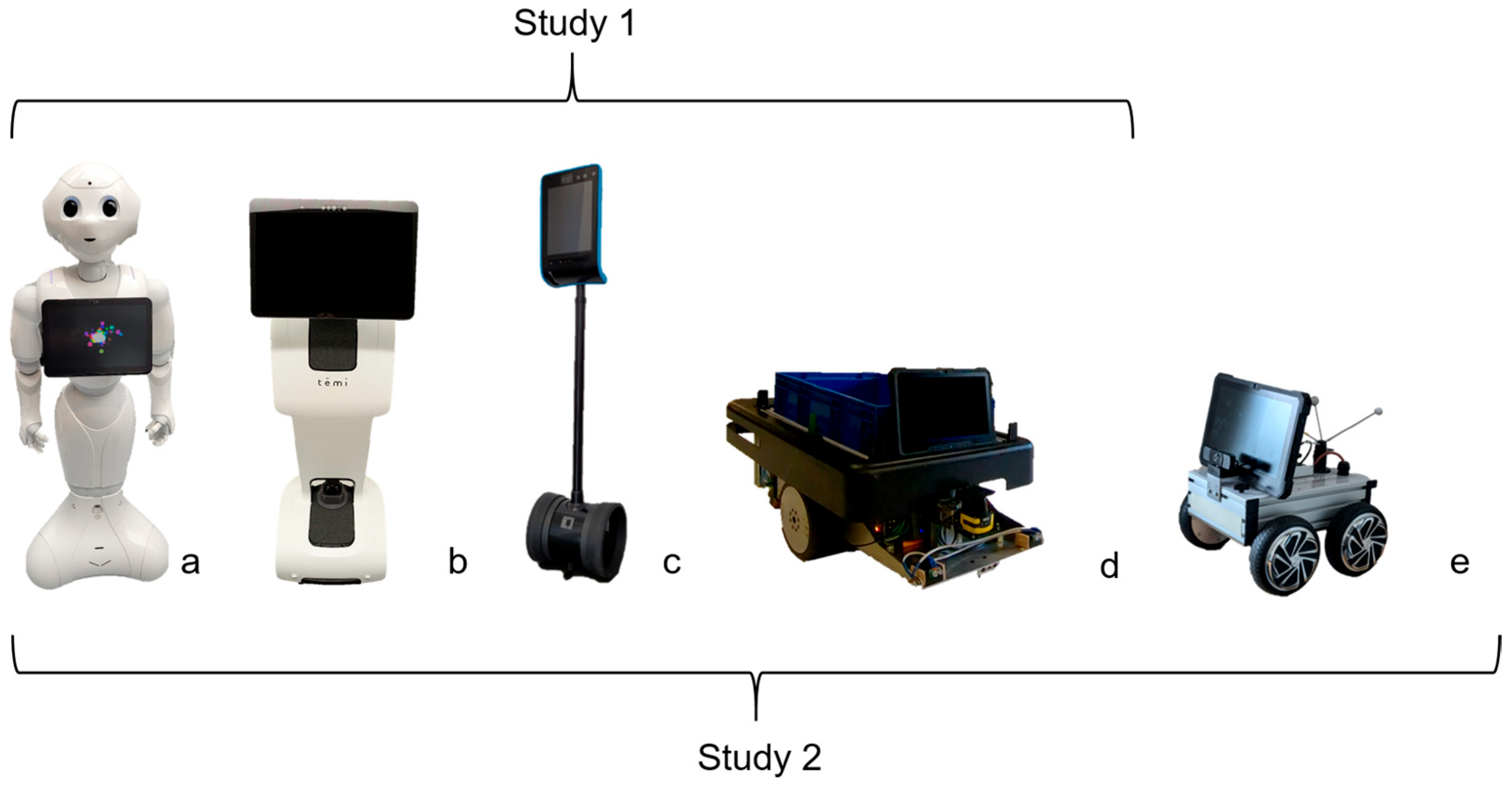
To ensure the effective use of telepresence systems in an industrial context, a negative impact of the design on communication and the attitude of the users should be avoided. It is therefore necessary to investigate how differently designed telepresence systems are perceived in different contexts and for different tasks. To approach this topic, two studies were carried out in which an assembly task under the guidance of a remote assistant was performed. A comparative analysis was conducted involving four (study 1) or five (study 2) distinct telepresence robots, respectively, alongside a tablet as a control condition, evaluated on social parameters such as sociability/morality, activity/cooperation, competence, and anthropomorphism. The primary objective of the current research was to explore the influence of the design variations of different TPSs on the social assessment of the remote assistant. The present study builds upon a previous investigation that had assessed analogous TPSs through video content [
13], as it exclusively concentrates on the authentic interaction and collaborative fulfillment of a task. It should be emphasized that this study, in contrast to previous studies, focuses not only on the social perception of the various TPSs, but on potential associations between social perception and collaborative activities. The present study thus provides additional knowledge on how design aspects could strengthen or hinder interactions between the users of TPSs and others who are physically present. Nevertheless, it is noteworthy that there was an absence of direct engagement between the telepresence systems and the participants, given that all systems functioned solely as conduits for the remote assistant’s display. As a control variable, the participants’ knowledge regarding telepresence systems and robots, as well as their prior experiences with these technologies, were also examined and incorporated into the analyses. The ensuing research inquiries were articulated:
Research question 1: Is there a difference in the perception of the TPSs with respect to (a) their human resemblance (anthropomorphism), and their perceived (b) sociability/morality, (c) activity/cooperation, and (d) competence?
Research question 2: Is there a difference between the TPSs regarding the trustworthiness placed in them?
4. Discussion
Telepresence systems could be a good alternative to cost- and resource-intensive assembly and maintenance work in deployment areas such as production systems, since they provide the users with the ability to move in distant locations while providing video conferencing systems. Thus, they enable the user to not only interact socially with other people in a distant location, but also make it possible to move around, for instance to aid the workers with their expertise without the need to travel. However, whether the use of TPSs could really make a change will be dependent on factors founded in the actual technical abilities required and, importantly, the users on both sides of the technology. Social perception was found to be associated with the acceptance and subsequent actual use of different robots [
21,
22].
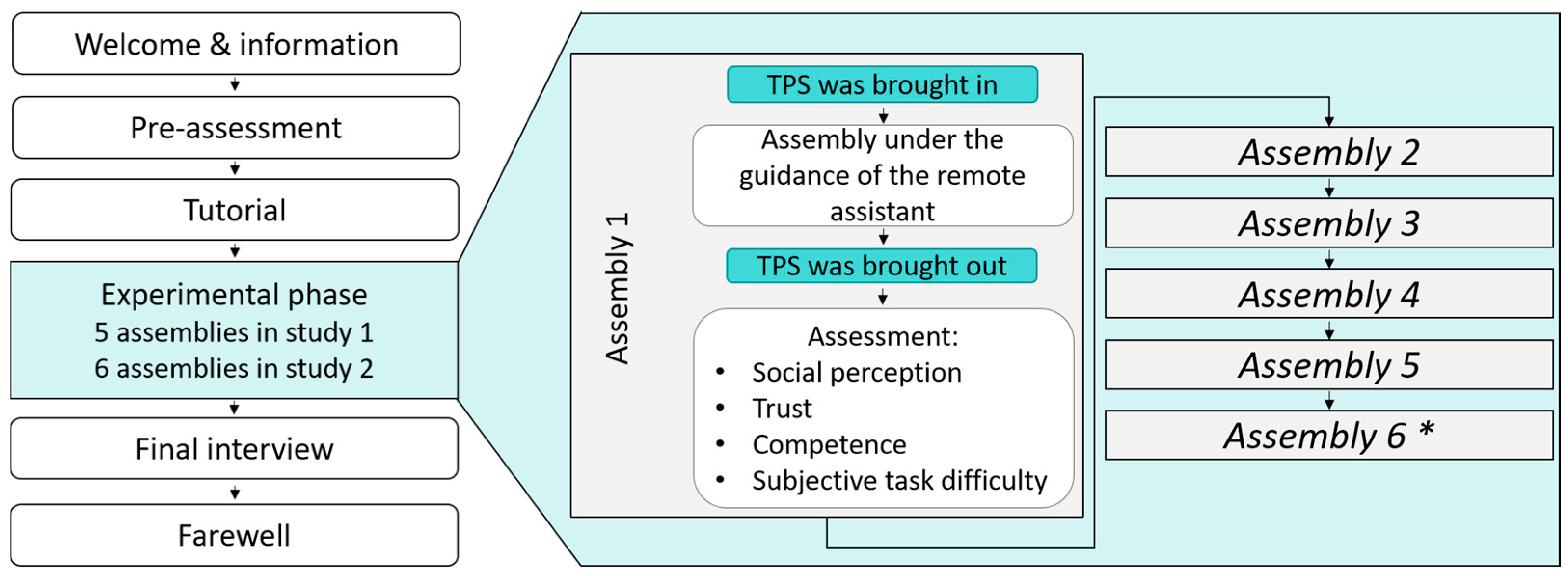
To this end, in the present work, we investigated the social perception of different telepresence systems, controlled by a remote assistant, in a collaborative task. The collaborative task consisted of the assembly of wooden models under the instruction of the remote assistant, who operated via different TPSs and a tablet as a control condition. Participants rated each TPS after the collaborative interaction in terms of the relevant dimensions of social perception: anthropomorphism, sociability/morality, activity/cooperation, competence, and trustworthiness.
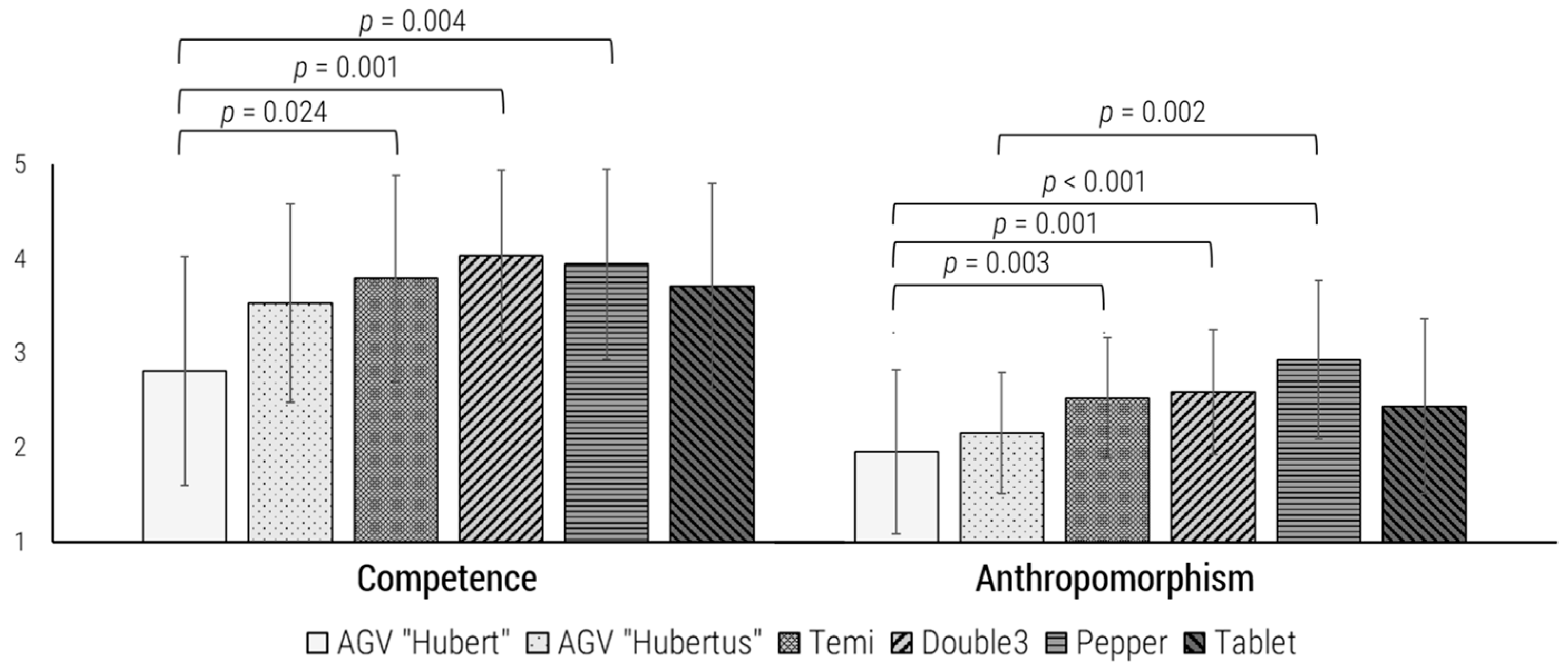
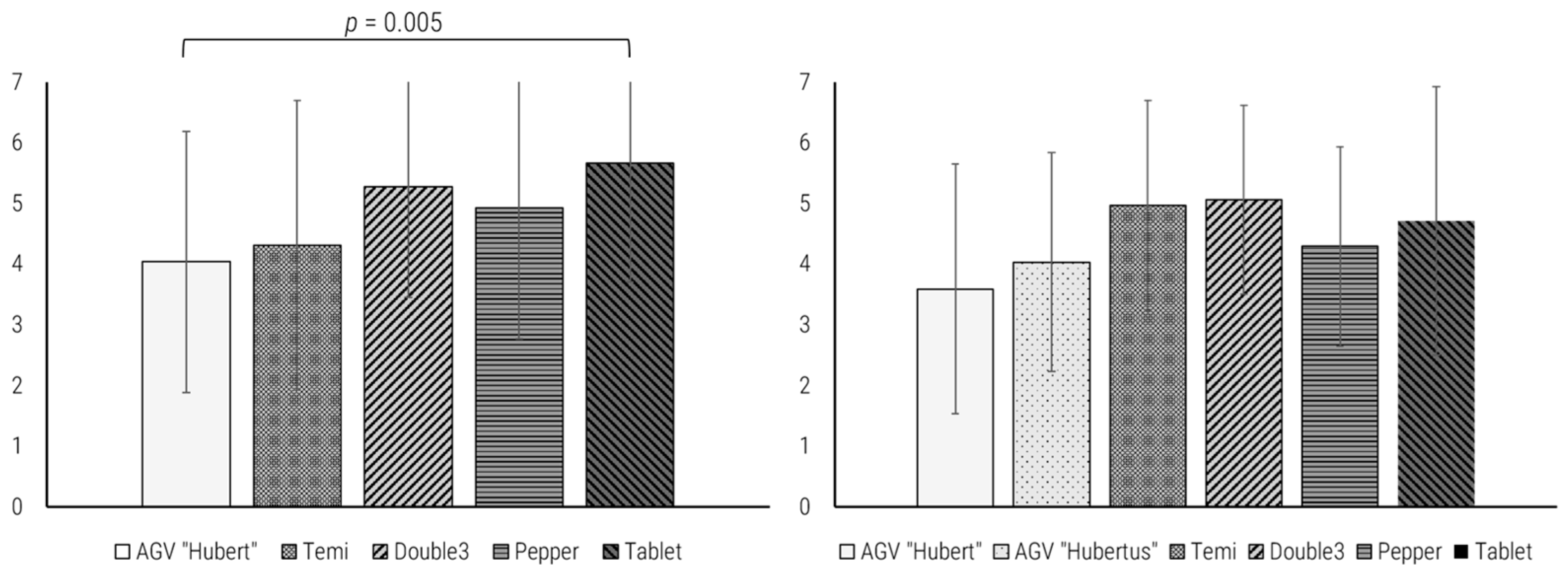
In terms of competence, the AGV “Hubert” received the lowest descriptive values in both studies. In study 1, the AGV “Hubert” was perceived as significantly less competent than Double 3 and the tablet control condition. In study 2, however the AGV “Hubert” was not only perceived as less competent than Double 3, but also than temi and Pepper. However, the tablet condition scored slightly lower in study 2 than in study 1. Three implications can be derived from these results: First, the differences among the conditions were minimal and exhibited only a small effect size in both studies. This suggests that the evaluative responses were more influenced by the standardized instructions provided by the remote assistant, or the perception of the remote assistant, across all conditions rather than the TPSs. Second, in both studies, the AGV “Hubert” was the only TPS to be rated significantly less competent than other TPSs (i.e., than Double3 and the tablet condition in study 1; than Double3, temi, and Pepper in study 2). Since this effect was evident in both studies, it can be assumed that the AGV “Hubert’s” additional assets (such as transporting items), which were not used and thus, not salient for the participants, were not perceived as useful; thus, it may not have been the best option for instructional purposes. As seen in
Figure 10, “Hubert” is a guided vehicle designed to move items in an industrial scenario. In the present study, it was equipped with a tablet to be able to communicate—for example, in tasks where it should move items and a remote assistant needed to be able to communicate with another person. Based on the results of study 1, it could be assumed that the height of the communication medium could have influenced the assessment. In contrast to the other TPSs, the tablet for the AGV “Hubert” was at a level of approximately 30 cm above the floor, whereas the tablets of the other TPSs were approximately at eye-level for the seated participant. However, the results of study 2 contradicted this, as the AGV “Hubertus” exhibited a similar height of the communication medium as the AGV “Hubert” and yet its competence ratings did not deviate significantly from those of the other TPSs. It can be concluded from these results that although the height of the communication medium was associated with the competence rating, as both AGVs scored descriptively lower than the other devices, it is not solely responsible for the lower rating. A third possible reason for the lower evaluation in terms of competence for the AGV “Hubert” could be the bulkiness of the TPS, which was intended for the transportation of loads. In contrast to the AGV “Hubert”, the AGV “Hubertus” is a rather agile, more maneuverable system and is similar to the other TPSs in its dimensions (depth x width, except in height).
The results of the two studies regarding anthropomorphism showed that in both studies, the AGV “Hubert” was perceived as less anthropomorphic, with significantly lower values than the values of Double 3 and Pepper in both studies. However, although all devices except the AGV “Hubert” showed similar anthropomorphism values in study 1, a more differentiated picture emerged in study 2: although temi, Double 3, and the tablet condition achieved similar values, this time, Pepper achieved the highest anthropomorphism values, which even differed significantly from the AGV “Hubert” and the AGV “Hubertus”. Comparing the results of both studies, it could be concluded that although the same survey instruments were used, the participants in study 2 made more differentiated assessments. Due to Pepper’s humanoid design, the results of study 2 are not surprising.
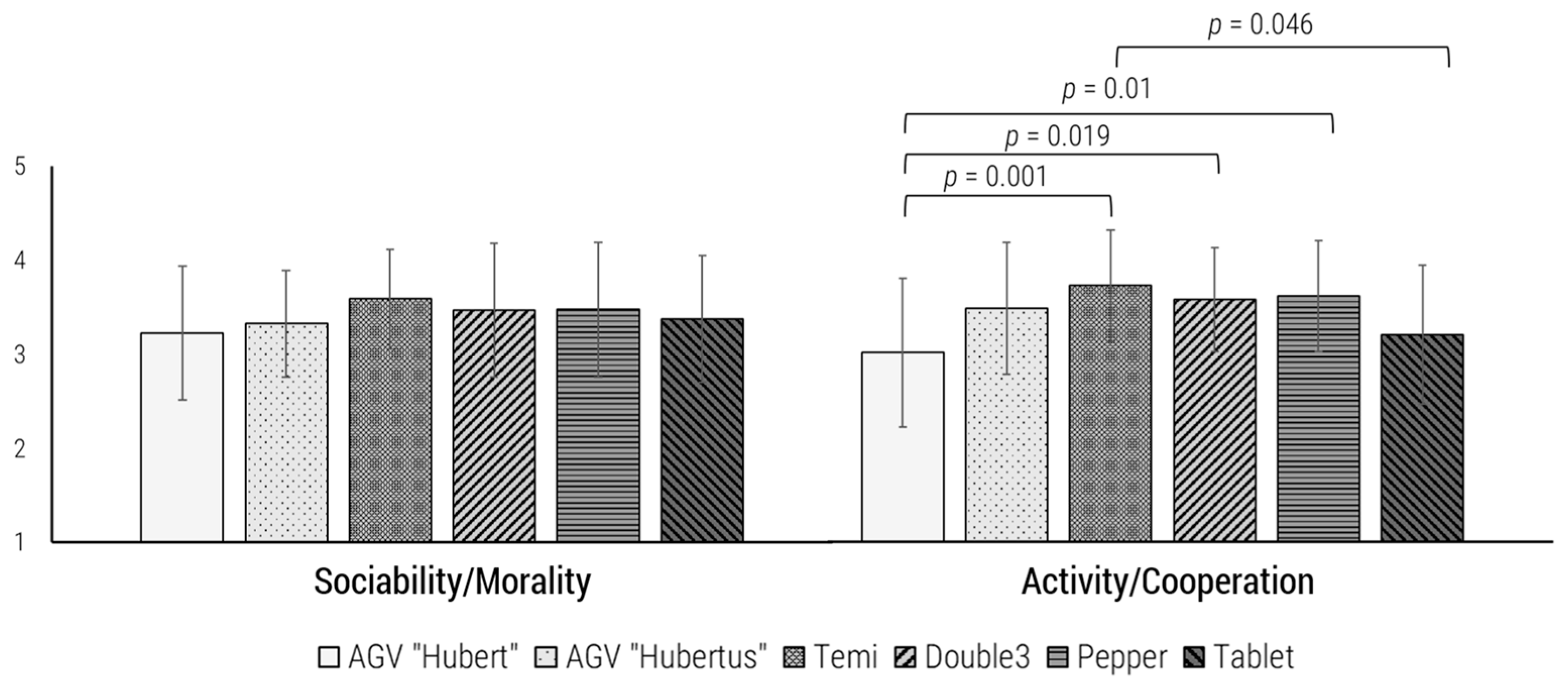
In both studies, our investigation did not reveal any significant differences in perceived sociability/morality, which suggests that this dimension is, in this scenario, only marginally connected to other social constructs and anthropomorphism. Given that morality and sociability are fundamentally human traits, it is plausible that the consistent visibility of the remote assistant providing instructions across all assembly tasks on the tablets led to an evaluation of the person rather than the technology itself. This implies that in this context, the presence of the remote assistant may overlay any attributes assigned to the technology, as the human qualities (and consequent perceptions, such as friendliness and morality) of the remote assistant were more pronounced than those of the technology. Moreover, the average ratings for this dimension were relatively high, indicating that the characteristics of the remote assistant likely exerted a favorable influence on the assessments.
The results for activity/cooperation in both studies showed significantly lower values for the AGV “Hubert” compared to Double 3 and Pepper. The AGV “Hubertus”, on the other hand, was perceived similarly to Double 3 and Pepper, which suggested that once again the massive, bulky design of the AGV “Hubert”, and not the height of the communication medium, had an influence on the rating. This assumption was also supported by the qualitative data from the interview, as 26% of the participants stated that the AGV “Hubertus” was “better” than the AGV “Hubert” because its design was smaller and more agile.
Regarding trust, only in study 1, the AGV “Hubert” and the tablet control differed significantly. No significant differences in trust were observed in any other comparisons. In study 2, no differences in trust were found between the different TPS designs. These results suggested that trust may not be as strongly influenced by the design of the TPSs as expected. However, it should be noted that a single-item scale was used in both studies to keep the experiment economically reasonable. While this approach provided useful initial insights, further studies focusing on trust should employ multi-item scales to gain more nuanced and comprehensive insights into how different TPS designs influence trust formation.
Although a significant number of participants expressed a preference for Pepper, this particular TPS was also identified as a source of distraction during the task. This phenomenon may be attributed to Pepper’s erratic movements (e.g., gesturing with its arms and fingers, tilting its head), which participants articulated as “feeling distracted due to Pepper’s gaze and hand gestures.” Nonetheless, some individuals reported experiencing discomfort while engaging with Pepper, specifically noting that it “felt as though a third party was present” and that the humanoid design, combined with the awareness of its mechanical nature, induced unease. Furthermore, several participants remarked that they directed more attention towards Pepper than the task at hand. It can be inferred that while Pepper was preferred, its application should be limited to contexts where such “distraction” is tolerable or even advantageous, yet it may prove to be less appropriate in environments such as in educational telepresence systems or for activities necessitating concentrated focus.
The verbal description regarding the TPSs provided by the participants indicates that Pepper was regarded as the most engaging and “adorable” system, whereas temi and Double 3 were perceived in a more neutral light, characterized metaphorically as “a tablet on wheels,” facilitating amicable interactions. The AGV “Hubert” received a more unfavorable assessment. This can be attributed, in part, to the fact that its functional utility (load transportation) was neither acknowledged nor deemed necessary within the context of the scenario. Based on the information provided by the participants in study 2, it was also deduced that the height of the communication medium was perceived as unfavorable and obstructive in both AGVs, but that the agile and reduced design of the AGV “Hubertus” led to better social perception. Here, the TPSs’ design had a negative effect on the overall evaluation, thus highlighting the importance of appropriate design choices for TPSs in different scenarios. Subsequent studies should further investigate the influence of the level of communication medium on the ratings, as well as evaluate the different design variants of AGVs in different contexts and tasks.
The assembly tasks were classified as ranging from easy to moderately difficult, which may have constrained the variability in the dataset. Due to the considerable disparity in difficulty posed by one specific task compared to the others, direct comparisons between this task and the various TPSs were unfeasible, given the randomized nature of the study. Consequently, for the purposes of replication, it is advisable to gather larger sample sizes to facilitate these comparisons. In future investigations, it would be beneficial to implement more challenging tasks to ascertain whether task difficulty influences the assessment of TPSs. Moreover, the fixed seating arrangement during the tasks inhibited the different TPSs from effectively showcasing their unique mobility capabilities and, particularly for the AGV “Hubert,” its ability to transport small items. Therefore, employing a variety of tasks could yield more insights into the social perception of diverse TPSs.
The findings indicate that participants exhibited a preference for TPSs that showed human-like characteristics in certain respects. At a descriptive level, the AGV “Hubert” received the lowest ratings across all evaluated metrics. The distinctions observed among the tested systems were negligible, with the exception of the AGV “Hubert.” While it could be assumed from the results of study 1 that both the design of the robots and the height of the communication medium significantly influenced the results, at least the latter could be mitigated based on the results of study 2, as the communication medium for the AGV “Hubertus” was at the same height as the AGV “Hubert”, and the AGV “Hubertus” achieved better values. However, it can be assumed that the design of the “body” has a strong influence on the evaluation, as the AGV “Hubertus” achieved better values at a descriptive level, which can be attributed to its more maneuverable and agile design. Future research should explore whether these findings can be replicated in alternate environments (e.g., industrial settings) or if the functionality of the AGV “Hubert” positively impacts its evaluation when its additional features confer a practical advantage.
Nevertheless, the assembly task was successfully completed in every condition, that is, with every TPS, and none of the participants stated that there were differences in the difficulty of the tasks due to the different designs of the TPSs. A limiting factor, however, was that the task was relatively simple; future studies should examine whether differences in performance (errors and time) result from the use of different TPSs and, if such differences are found, how these are reflected in the social ratings.
The present studies are not without limitations: The remote assistant, who delivered the instructions for the assembly task, was female and of a comparable age across all experimental conditions to facilitate comparability. Nonetheless, subsequent research should further explore the hypothesized influence of the remote assistant on the assessment of the TPSs. An additional constraint arose from technical difficulties: in both experiments, the audio feature of Pepper’s tablet was inoperative; consequently, it was determined that a separate tablet should be utilized exclusively for audio playback. This alternative tablet was positioned in close proximity to both Pepper and the participants.
It should also be noted that, while the selected assembly task ensured standardization and accessibility, its simplicity did not reflect the procedural and cognitive demands of real-world industrial assembly tasks. The focus here was on the feasibility of assembly without special prior knowledge and without endangering the participants. Detailed investigations in such a general framework should be followed by studies dealing with specific scenarios where a TPS is needed in order to draw conclusions and guidelines for the type of TPSs to be used later. In future studies, performance should also be measured—such as task completion time and error rates—as these objective metrics can complement subjective evaluations. In the present study, such measures were deliberately omitted to avoid placing unnecessary pressure on participants. Furthermore, the cooperation in both studies took place between the participant (who carried out the assembly) and the remote assistant (who read out the instructions). So, there was only limited cooperation, which could have influenced the evaluation of the TPSs. Therefore, in follow-up studies, the remote assistant’s part could be embodied by another participant who would not read out prefabricated instructions but explains the instructions using visual material to simulate a real interaction.
Another limitation is that this study was conducted at the university, so the sample population characteristics were young, highly educated, and predominantly female. It is therefore not possible to generalize the results, and it was not possible to look for gender-based differences in TPS scores. The sample also raised the question of the extent to which the results were transferable to an industrial context, as most employees in the production system sector are male and do not have a university degree. To overcome these problems, replication studies are currently being conducted with an older and more gender-balanced participant sample. Additionally, studies involving industrial user groups have been planned to better assess the relevance and applicability of the findings to real-world industrial environments.
In order to classify which types of tasks are suitable for working with TPSs in an industrial context, firstly, it is necessary to evaluate which potential industrial collaborative use cases of TPSs are conceivable. Secondly, these use cases should be classified so that the tasks can be clustered in terms of task complexity and the degree of interaction with regard to mobility and collaboration. In a third step, this clustering should then be incorporated into studies with different collaborative tasks so that it can be checked which tasks are suitable for which TPS and how the social perception of these systems turns out depending on the task type. This approach can ensure the effective use of TPSs in production engineering in the future.



 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}