1. Introduction
The Delta robot, proposed by Clavel [
1] in the 1980s, has become one of the most commercially and technologically successful parallel robots. This robot can have either rotational or linear drives. In the latter case, carriages, driven by a ball screw or belt drive, move along linear guides, which usually have a horizontal, vertical, or inclined orientation [
2]. The inclined axes of the actuated joints were also used in Delta-type robots with rotational drives. An example of such a robot is NUWAR [
3]. The inclined axes provided this robot with greater workspace dimensions compared with the original model [
1]. Papers [
4,
5] present other Delta-type robots with inclined axes.
With its simple design and high-performance capabilities, the Delta robot is attractive to numerous researchers and has served as a prototype for various mechanisms and devices, including Linapod [
6], the H4 robot [
7], Orthoglide [
8], the I4 robot [
9], the Eureka robot [
10], Delta Keops [
2], the Par4 robot [
11], the Heli4 robot [
12], and Delthaptic [
13]. Although the Delta robot was initially proposed for high-speed pick-and-place operations, mechanisms with identical or similar structures have found application in other industries, such as machining [
14], medicine [
15], additive technologies [
16], and high-precision operations [
17].
The Delta-type robots discussed above differ in terms of their design and degrees of freedom (DOF), determined by their practical realization. Actuation redundancy is another feature of Delta-type robots that can improve their performance. In this case, a robot has extra actuated kinematic chains or extra actuators added to its passive joints [
18]. In [
19], the authors examined the advantages of actuation redundancy in parallel mechanisms. These advantages include the exclusion or avoidance of singular configurations, homogeneous and symmetric force output, stiffness improvement within the workspace, and the opportunity to use low-powered drives. Additionally, redundantly actuated systems remain controllable even if one or more actuators break down.
At the same time, few studies have considered the actuation redundancy in Delta-type robots. One example is the Eureka robot [
10] with three translational and two rotational DOF (a 3T2R motion pattern) controlled by six drives. It could reach a
rotation about one axis and a complete rotation about another axis. In [
20], the authors applied an optimal redundancy coordination method to another redundantly actuated parallel mechanism. It relied on a 3-DOF Delta robot coupled with an additional 1-DOF parallel mechanism, where every kinematic chain was a slider-crank linkage. This system provided redundant actuation to the vertical translation. Paper [
21] used actuation redundancy to obtain high accelerations in Delta-type robots with 3T and 3T1R motion patterns. High accelerations are critical for rapid pick-and-place operations, the primary application of Delta-type robots. In that study, actuation redundancy was achieved by adding similar actuated kinematic chains. Paper [
22] introduced a haptic device called DELTA-R (formerly known as DELTA-4). Unlike the classical Delta robot [
1], it included two kinematic chains, each with two drives. Four drives controlled three DOF of the end-effector. Other redundantly actuated 3-DOF Delta-type robots were studied in [
23]. They had symmetric (Sym-RAL DELTA) and asymmetric (Asym-RAL DELTA) structures with horizontal linear guides, which supported four kinematic chains with driving carriages. These designs enlarged the workspace by singularity-free mode changes. Paper [
24] showed a 3-DOF robot, where every kinematic chain had an additional actuated link. Six drives controlled three translational DOF of the end-effector. This structure provided the robot with reconfigurability that enlarged its workspace. The authors of [
25] considered a Delta-type robot with a 3T1R motion pattern. It included six actuated kinematic chains with linear guides, where two chains used parallelogram linkages. The robot end-effector rotated for more than
.
The review above showed that redundantly actuated Delta-type robots generally had three DOF (a 3T motion pattern) or four DOF (a 3T1R motion pattern). We have found only one model with another mobility, equal to five (the Eureka robot). On the other hand, the additional DOF can significantly extend the practical applications of such systems. In this regard, we propose a new 5-DOF Delta-type robot with actuation redundancy. The major contributions of this paper include developing the kinematic algorithms for this novel robot, which provide closed-form solutions to both the inverse and forward kinematic problems. In addition, we present a computer-aided design (CAD) model of the robot and perform dynamic simulations using CAD tools.
The rest of this article has the following structure.
Section 2 describes the design of the proposed robot.
Section 3 and
Section 4 consider its inverse and forward kinematics, respectively.
Section 5 presents a computer model of the robot and solves the inverse dynamic problem using CAD software.
Section 6 discusses the obtained results and proposed algorithms.
Section 7 recaps the paper and mentions directions for future studies.
2. Robot Design
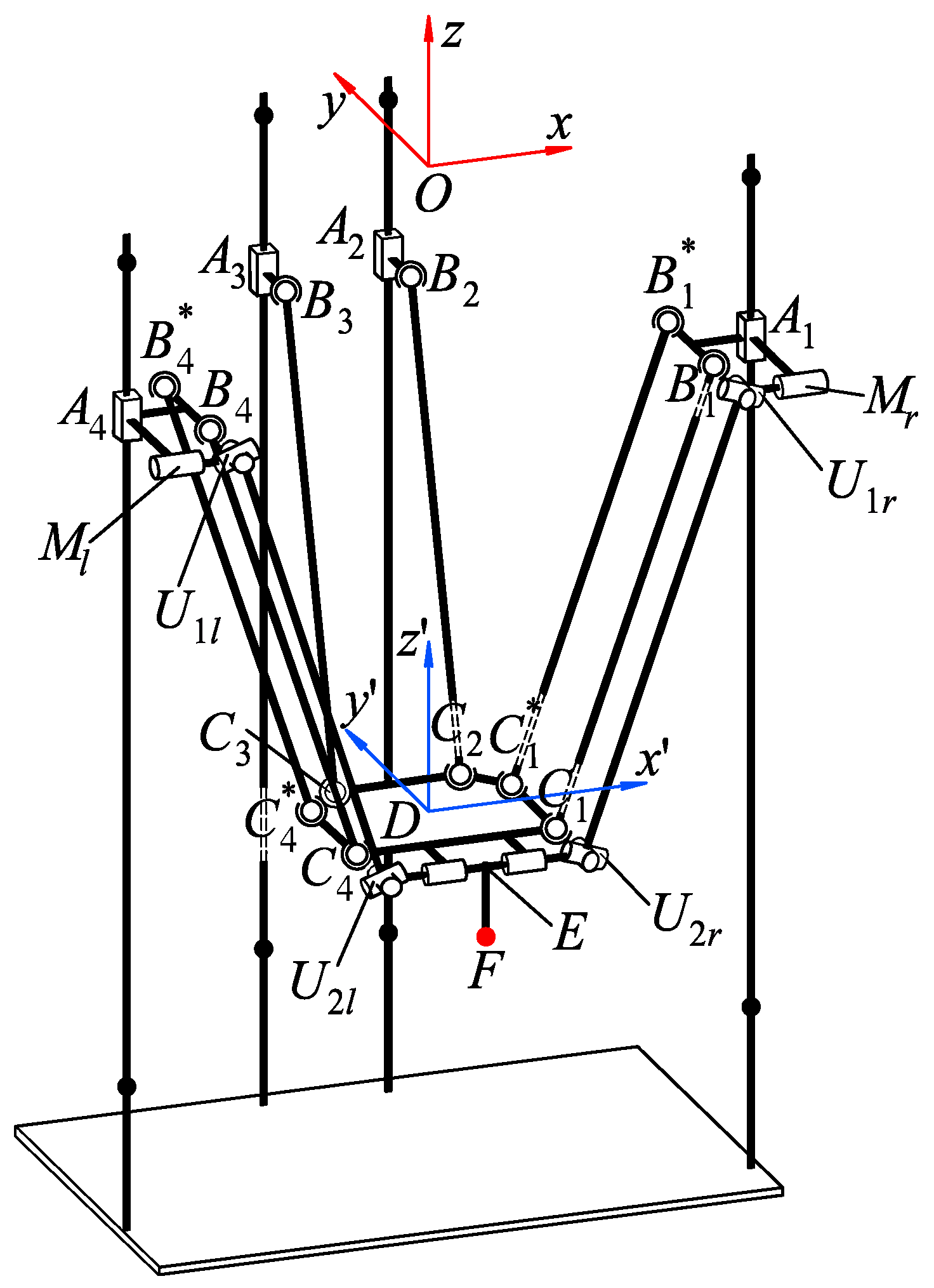
Figure 1 depicts the considered robot. It has four kinematic chains (branches) of two different types. Let
be an index number of a branch. Each branch connects to the base with carriage
, which translates vertically. In branches 1 and 4, the carriage is followed by parallelogram
with spherical joints in its vertices. One (shorter) side of this parallelogram is rigidly connected to the carriage, while the opposite side is connected to the moving plate. Branches 2 and 3 utilize single rod
with two spherical joints on their ends instead of a parallelogram. Branches 1 and 4 also include auxiliary drives (motors)
and
, respectively. These motors are connected to the tilt axis of the end-effector (tool)
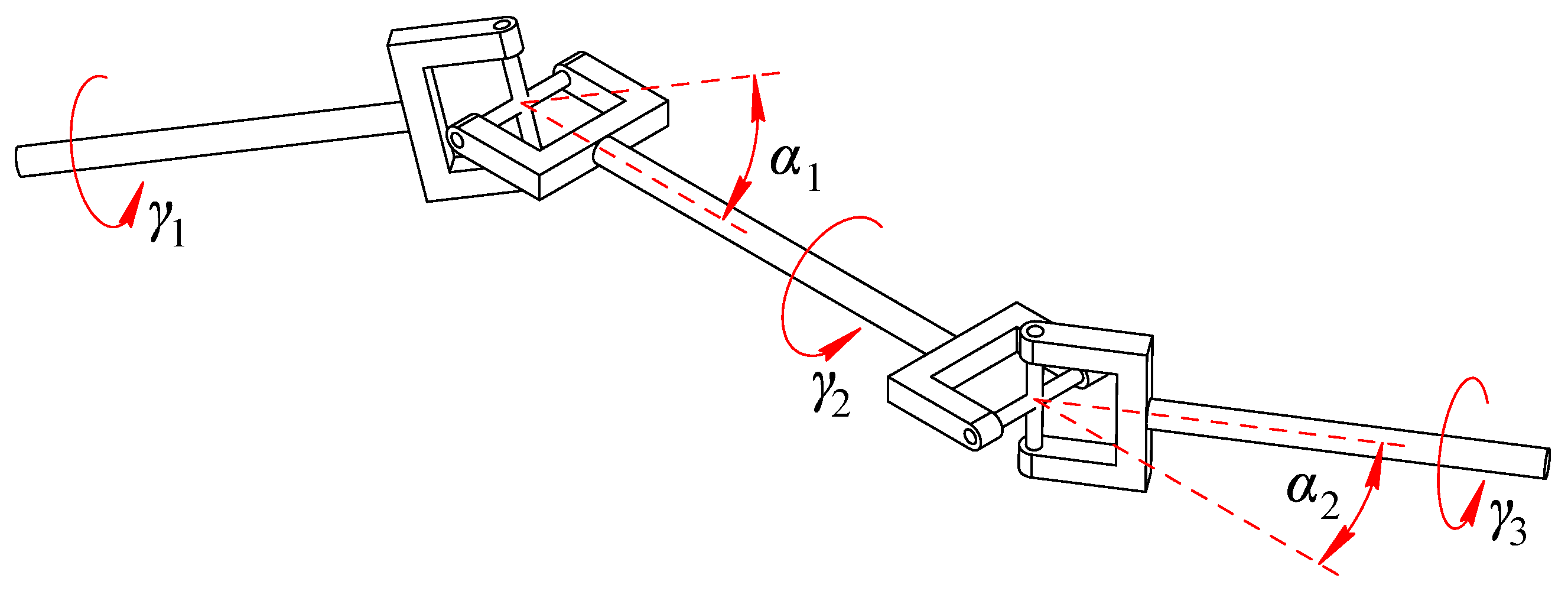
with pairs of universal joints
,
and
,
, respectively.
The robot design provides its end-effector with five degrees of freedom: three translations and two rotations. This motion pattern can be verified by looking at the constraints imposed by the branches. Branch 1 imposes two constraints on the moving plate, permitting three translational motions and only one rotation around the axis parallel to the shorter side of the parallelogram. Since branch 4 is placed directly opposite branch 1, it provides the same constraints. Branches 2 and 3 do not constrain the motion of the moving plate. Therefore, the moving plate of the robot has four DOFs (a more detailed and formal explanation based on the screw theory can be found in paper [
26]). The second rotation (around the
axis) is kinematically decoupled from the four above-mentioned motions. Any external load (torque) corresponding to this DOF is resisted only by the motor that performs this rotation. To compensate for this drawback and distribute the load between two auxiliary branches, we use two motors—
and
—which simultaneously control the rotation. Actuation redundancy also helps in situations in which one of the auxiliary branches is in a singular configuration (as discussed at the end of
Section 3.1).
In the proposed design, the end-effector is attached to the moving plate by a revolute joint, and the plate forms a parallel mechanism with the base. Thus, the robot structure can be classified as a hybrid one. There are several Delta-type robots with a similar structure, for example, Eureka [
10], Par4 [
11], or Heli4 [
12], where the end-effector also rotates relative to the moving plate. In these works, the authors considered their robots to be parallel. We follow the same convention and refer to the proposed robot as a parallel one.
This design is motivated by the outstanding performance of Delta-type robots, whose branches experience only the tensile loads. Therefore, expanding the capabilities of the Delta robot by introducing new rotational DOF is an interesting and relevant scientific problem. The proposed design can also be modified into a 6-DOF one by adding a central driving rod, like in the original Delta robot [
1]. However, certain applications (e.g., machining) do not need the sixth DOF because it is realized by the rotation of the tool or the workpiece.
In the literature, we found only one similar Delta-type robot with redundant actuation. This is the Eureka robot designed by Krut et al. [
10]. Its end-effector also has five DOF and a 3T2R motion pattern, but one rotational DOF differs from the robot we propose here. In Eureka, the tool rotates about its own axis and cannot tilt relative to the moving plate. As we discussed in the paragraph above, we often do not need this tool rotation because it can be provided by other means. Our design also does not use any additional transmission mechanisms, except for the two auxiliary branches—this is another advantage of the proposed robot. In contrast, Eureka does not have a solid moving plate and uses a rack and pinion transmission to achieve the end-effector rotation. This design increases the weight of the moving elements and worsens the robot positioning accuracy because of the inevitable backlash in the rack and pinion transmission. Thus, we believe the proposed robot has some advantages over Eureka and meets the concept of the light-weight Delta robot.
4. Forward Kinematics
The task of the forward kinematics is to determine the configuration of the end-effector for the given displacements in the actuated joints. This can be important for the estimation problem: we can evaluate the end-effector location and orientation from the sensors, which are generally placed in the actuated joints. For parallel robots, the forward kinematic problem usually has multiple solutions, the determination of which requires solving several coupled nonlinear equations. In this section, we first present an approach that allows us to find all the solutions, and then we study a numerical example.
4.1. Solution Method
For the considered robot, the goal of the forward kinematics is to find parameters
x,
y,
z,
, and
for the known values of
,
,
, and
. In
Section 2, we showed that the motion of the auxiliary branches did not affect the motion of the moving plate. Therefore, we first look at the forward kinematics for the moving plate given the values of
.
We consider Equation (
3) for all
. It represents a system of four nonlinear and coupled equations with respect to four variables:
,
,
, and
. Without loss of generality, we can use point
as a reference point instead of point
D and select its coordinates as variables instead of coordinates of point
D: this allows simplifying the subsequent calculations. We can rewrite Equation (
3) as follows:
where coefficients
,
, and
for
are linearly dependent on
and
; coefficients
,
, and
are constant and do not depend on
; coefficients
are constant for all
.
Next, we subtract Equation (
13) for
from the three remaining equations and obtain a system of three linear equations with respect to variables
,
, and
. We can represent this linear system in a matrix form:
Let
,
, designate matrix
whose
i-th column is replaced with vector
. Given this notation, we solve the linear system using Cramer’s rule [
28] (ch. 5):
In the expressions above, coefficients , , , and have known and constant values; and are shorthands for and , respectively. Note that , , and are quadratic in and , while is cubic because the second column of matrix has constant elements, and two other columns depend linearly on and .
Now, we substitute Equation (
15) into Equation (
13) for
. Suppose
(we will examine the case
in
Section 6). The equation transforms into the following one:
which, if we substitute Equation (
16), is equivalent to:
where coefficients
have known and constant values.
Equation (
18) is a sextic polynomial equation with respect to
and
. We can transform it to an equation with respect to single variable
t by applying the tangent half-angle substitution:
,
, where
. Substituting these expressions into Equation (
18) and using MATLAB symbolic toolbox, we find a factorized polynomial equation:
where coefficients
have known and constant values.
Considering the second factor of Equation (
19), we see it is an eighth-degree polynomial equation, the solutions of which provide up to eight different values of angle
. Having found
, we calculate
, determine variables
,
, and
from Equation (
15), and compute coordinates
,
, and
of point
D using Equation (
2) for
. Thus, we have solved the forward kinematic problem for the moving plate.
To find coordinates
x,
y, and
z of end-effector point
F, we can apply Equation (
1). This equation requires a value of
, which we find from any expression of Equation (
8). Thus, we have found all the coordinates that define the end-effector configuration. This concludes the forward kinematics for the considered robot. In the following subsection, we consider an example of solving the forward kinematic problem.
4.2. Numerical Example
To verify the proposed algorithm, we consider an example of forward kinematic analysis for the same geometrical parameters of the robot as in
Section 3.2. First, we solved the inverse kinematics for the following values of the parameters that define the end-effector configuration:
The values above correspond to the robot configuration depicted in
Figure 5. Using the algorithm presented in
Section 3.1, we computed the following displacements in the actuated joints (accurate to ten-thousandths):
Next, we solved the forward kinematics for the values above. Applying the algorithm from
Section 4.1, we found four different real solutions of Equation (
19) that related to four different assembly modes.
Figure 8 shows these assembly modes, and
Table 1 enumerates the corresponding solutions. We see solution #4 is identical to the values in Equation (
20)—this verifies the correctness of the proposed algorithm. Solutions #1 and #2 show the plate inverted, and solution #3 corresponds to the moving plate position above the carriages. In practice, these three assembly modes will probably be unreachable because of the robot design.
5. CAD Simulation
This section simulates the inverse kinematics and dynamics of the robot by applying CAD tools. The latter allows for the calculation of the motor torques for the prescribed end-effector trajectory. Using the obtained results, we can confirm the selection of the drives or choose the other ones. The advantages of this CAD simulation are its quickness, simplicity, and accuracy, because we consider both the material properties and the complex shape of robot elements.
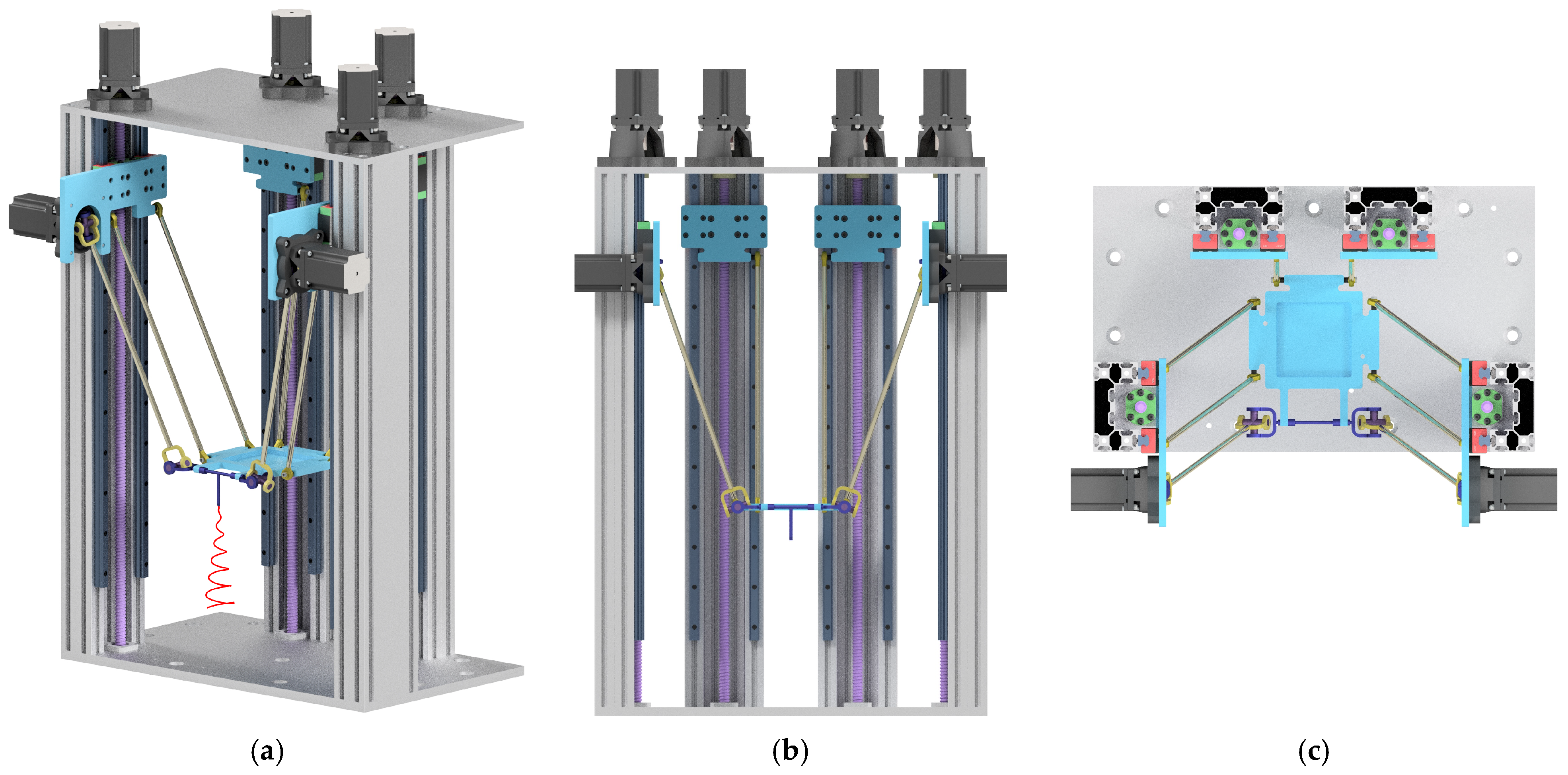
Figure 9 illustrates a computer model of the robot designed in SolidWorks software [
29]. The motion range of the robot end-effector along the
,
, and
axes is 0.297 m, 0.324 m, and 0.424 m, respectively. The moving plate can tilt for
, and the end-effector rotation range relative to this plate is
. The base plate, top plate, moving plate, and carriages are made of aluminum alloy. Four vertical columns represent an extruded profile, and each column includes two linear rails attached to the carriage. We use a preliminary chosen Nema 23 stepper motor with a ball screw transmission to actuate each carriage. Similar motors, installed on the side carriages, control the end-effector rotation via two rods with universal joints. All rods are made of carbon fiber.
The first step is to simulate the inverse kinematics of the mechanism. We suppose the end-effector moves at a constant speed of 0.046 m/s along the trajectory analyzed in
Section 3.2 and illustrated in
Figure 9a. This speed value is selected to achieve a simulation time equal to 10 s. The results of the kinematic simulation are the values of the angular displacement, speed, and acceleration of the motors. The simulation, performed in SolidWorks, shows that the angular displacements are very close to the analytical computations: the average deviation is less than 1%. This deviation is due to the slight discrepancies between the analytical trajectory and the one drawn using CAD tools. These discrepancies are caused by import limitations and different approaches for the linear approximation of the trajectory in the SolidWorks and MATLAB software.
Since the angular displacements are identical for analytical and CAD simulations, we use CAD tools instead of the Jacobian analysis to compute angular speeds
and accelerations
of the motors, which are shown in
Figure 10. Note that the redundant actuation prevents setting two input motions for the drives that control the end-effector rotation relative to the moving plate. To overcome this issue, only drive
(
Figure 1), installed on the left carriage, is considered actuated in this and subsequent dynamic analyses.
The next step is to simulate inverse dynamics.
Table 2 shows the inertial parameters of the robot movable links, which are used in dynamic computations. The inertia parameters are defined with respect to the axes and reference frames depicted in
Figure 11, where point
s indicates the center of mass of each link. The links shown in
Figure 11a,b perform the translational motion, and
Table 2 ignores their moments of inertia. The links shown in
Figure 11c,d,g rotate about the
,
, and
axes, respectively, and
Table 2 specifies the inertia moments about these axes. The remaining links shown in
Figure 11e,f,h,i perform spatial rotations, and
Table 2 specifies the inertia matrices about the depicted reference frames.
After solving the inverse kinematic problem using the SolidWorks software, we import the obtained results to Autodesk Inventor, where they are used as the input motion for solving the inverse dynamic problem. As we mentioned before, only the left auxiliary motor () is active because of the CAD limitations. We assume that it fully supports any load applied to the end-effector, while the second drive () remains passive. As a result, the computed torque will be higher compared with the redundantly actuated case. Because the considered end-effector rotation is decoupled from its other motions, we expect the motor torque will be twice lower in that case.
Figure 12 presents the results of the inverse dynamic simulation. The torque oscillations in this figure match the end-effector motion along the spiral-like trajectory. Torques
and
in the motors translating the side carriages are higher than torques
and
in the motors translating the back carriages. This increase is because the side carriages are equipped with the motors (
Figure 11a), and they have higher mass according to
Table 2. The minimum value of each of these torques agrees with the force value required to support the carriage weight (we consider the screws with a pitch of 5 mm). Torque
of motor
, which rotates the end-effector relative to the moving plate, is greater than torques
, because this motor operates without a ball screw transmission or any other reducer. In practice, we expect to obtain the lower values of torque
because of the redundant actuation, as discussed in the preceding paragraph. However, even with these high torque values, the preliminary chosen stepper motors (Nema 23) are suitable for the considered robot.
6. Discussion
Most of the current research has considered the kinematic analysis of a novel 5-DOF Delta-type robot, and here, we discuss some issues of this analysis. The algorithm for solving the inverse kinematic problem is straightforward: we should only check that the considered configuration of the robot belongs to its workspace to avoid complex solutions of Equation (
4). The forward kinematics is more challenging to solve. The method we used to address this problem resembles familiar elimination approaches [
30,
31,
32], applied to Delta-type robots as well [
12,
33,
34]. Unlike most of these works, we do not need to compute a resultant of polynomial equations to obtain the final Equation (
19), which simplifies the elimination procedure. At the same time, the forward kinematics has several caveats.
When we derived Equation (
18), we assumed
. In this case, we compute different values of angle
following the developed algorithm. Parameter
depends on this angle, and we cannot certify that all the obtained solutions do not make it equal to zero. If
for some angle
, we cannot use Equation (
14) to find
,
, and
, because matrix
degenerates. To solve the forward kinematics, we should consider two independent linear equations of Equation (
14) and quadratic Equation (
13): we can get one quadratic equation with respect to a single variable by eliminating two others using the linear equations. In this case, we get two different moving plate configurations for a single value of angle
. For example, with the “symmetrical” geometry considered in
Section 3.2 and with
, we have solution
(the moving plate is horizontal), which makes
. Using the procedure above, we obtain two configurations of the moving plate for this angle: when it is above or below the carriages. If the rank of matrix
drops by two, there are no three independent equations to find
,
, and
. As a result, the forward kinematic problem has an infinite number of solutions, and the robot is probably in a singular configuration—this analysis is beyond the current article. However, we note that the robot singularities only depend on the configuration of its 4-DOF part. This is because the fifth DOF (the end-effector rotation) is decoupled from other motions, and configurations of the two auxiliary branches do not affect the 4-DOF part of the robot and its singularities, which were studied in [
26].
Finally, we also cannot guarantee that the eighth-degree polynomial Equation (
19) has eight real solutions corresponding to eight different assembly modes of the robot. Furthermore, even if we obtain eight real solutions of this equation, we cannot assert that
for all the solutions. These problems are beyond the scope of this article, and we will consider them in the future.
7. Conclusions
This article has studied a novel 5-DOF redundantly actuated Delta-type parallel robot. The robot end-effector has three translational and two rotational DOFs, and one rotation is controlled by two drives. This redundant actuation makes the robot design symmetrical and helps distribute the load between the drives more evenly.
First, we have developed the algorithm to solve the inverse kinematic problem. The algorithm provides us with a closed-form solution to this problem, which was illustrated with the trajectory simulation example. Next, we have considered the forward kinematics of the robot. We have proposed a procedure that reduces this problem to solving the eighth-degree polynomial equation. Its roots correspond to various assembly modes of the robot. The numerical example has presented a case with four real solutions and four assembly modes. Determining the maximum possible number of these modes is an open issue that we will solve in the future.
Finally, we have used SolidWorks and Autodesk Inventor to design a computer model of the robot and perform inverse kinematic and dynamic simulations. The CAD tools simplify dynamic computations and allow us to consider complex shapes and inertial parameters of the robot links as accurately as possible. As an example, we have solved the inverse dynamic problem and computed the motor torques required to follow the spatial trajectory analyzed in the inverse kinematics.
The proposed kinematic algorithms represent the basis for workspace analysis and singularity determination of the robot, which will be performed in future studies. These techniques can be adapted to other parallel robots as well. We will also use the results of CAD simulations to create a physical prototype of the discussed robot.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}