
Low-Cost Cable-Driven Robot Arm with Low-Inertia Movement and Long-Term Cable Durability

 ,
,  ,
,
Abstract
1. Introduction
1.1. Related Works
1.2. Research Concept
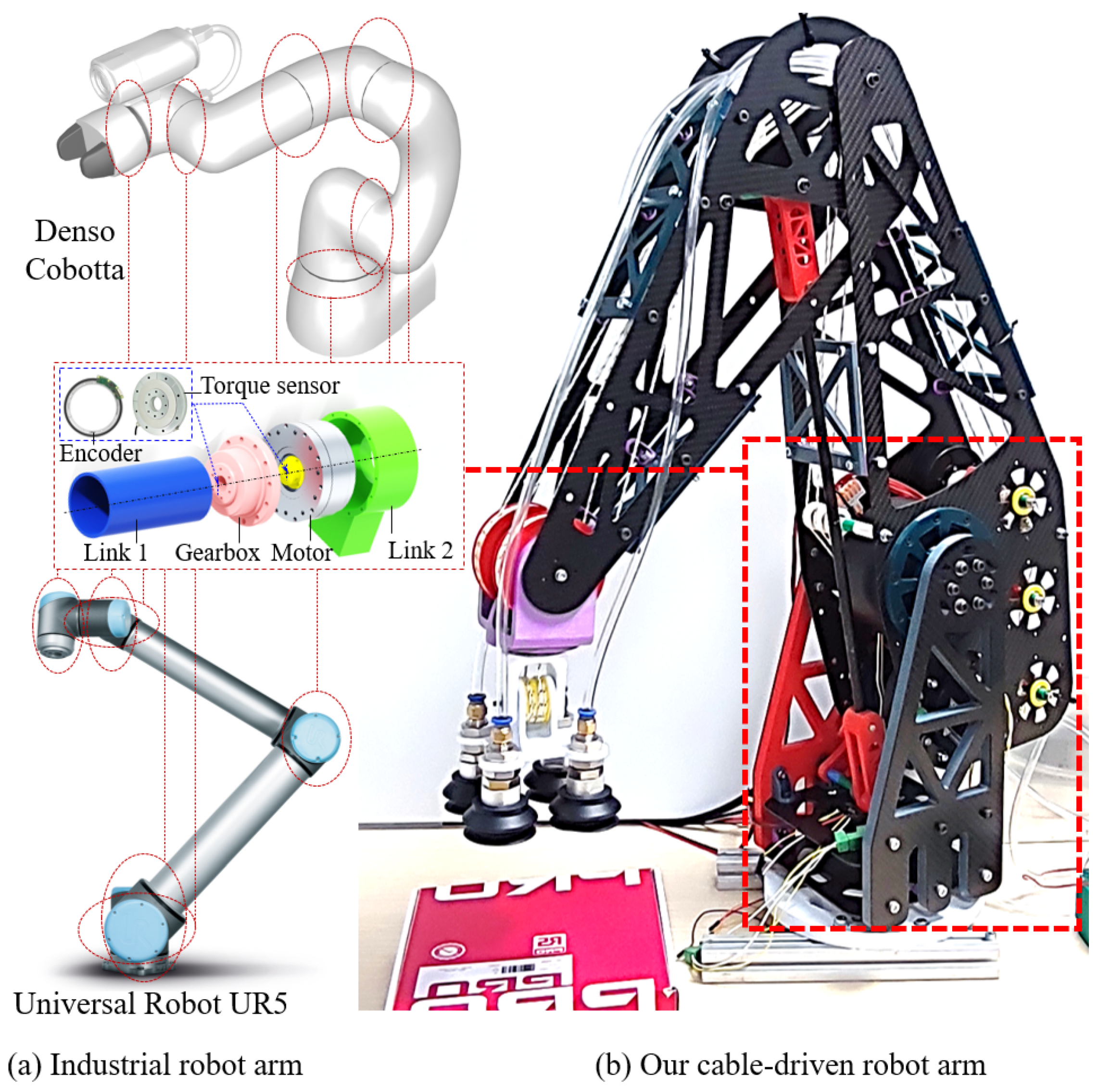
- Robot arm: We design a low-cost cable-driven robotic arm with six degrees of freedom (DOF) at the same scale as the UR5 robotic arm. Our proposed design targets to manipulate a 5 kg payload. The arm’s body is lightweight, allowing for operation with low movement inertia. Unlike many previous designs where all six DOF are cable-actuated, our approach employs a hybrid design. Only the three DOF in the wrist joints are driven by a cable system. To ensure good pose repeatability, the shoulder and elbow joints, which influence longer moment arms, were designed with a direct-drive structure.
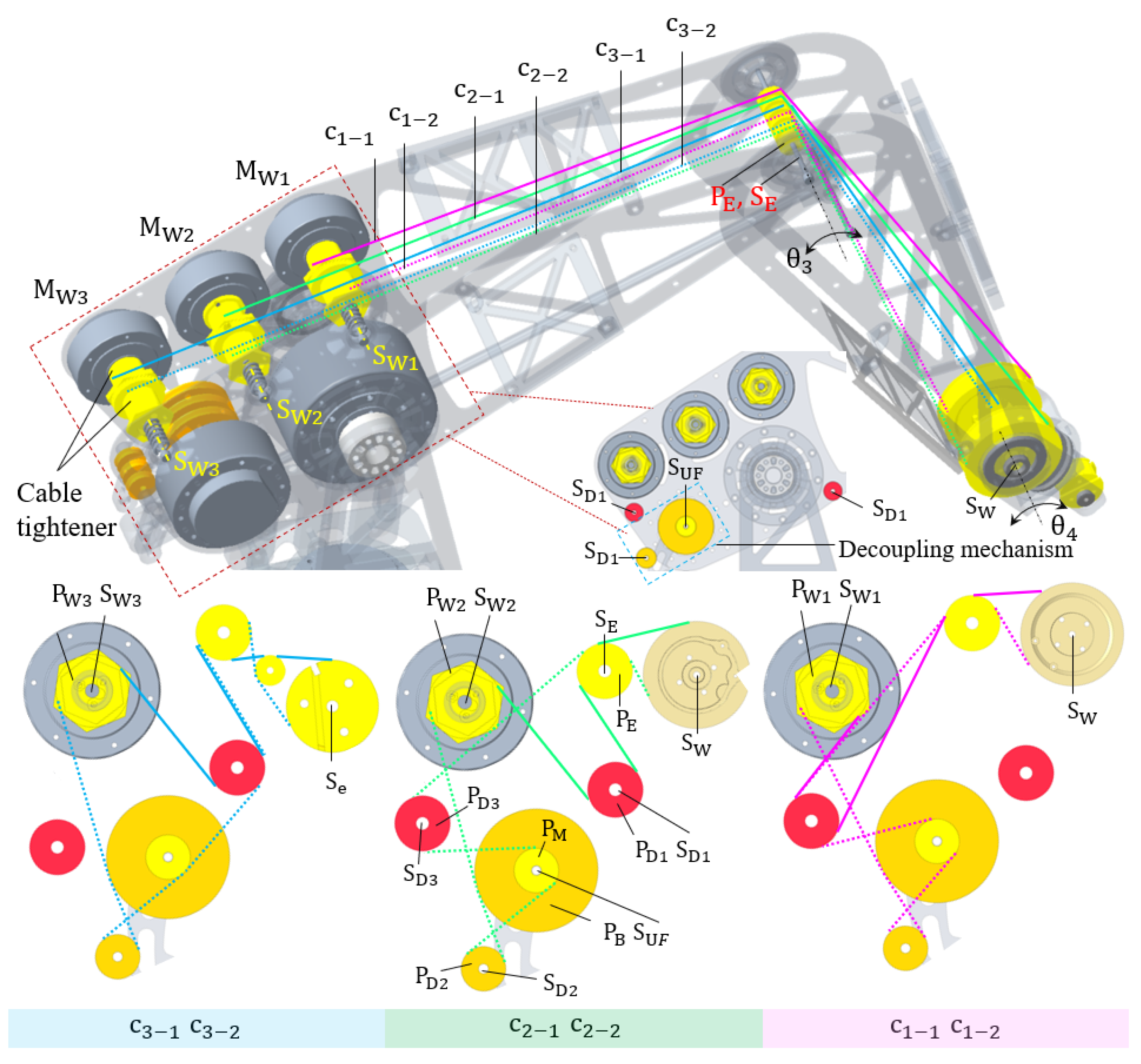
- The wrist: The design relocates the three motors driving the three DOF of the wrist closer to the shoulder, with the actuation remotely transmitted by three pairs of cables. As a result, the wrist weighs only 0.8 kg, allowing for safer human interactions and reducing the torque requirements for the elbow and shoulder motors. This reduction in torque requirements also leads to a decrease in the overall cost and weight of the robotic arm.
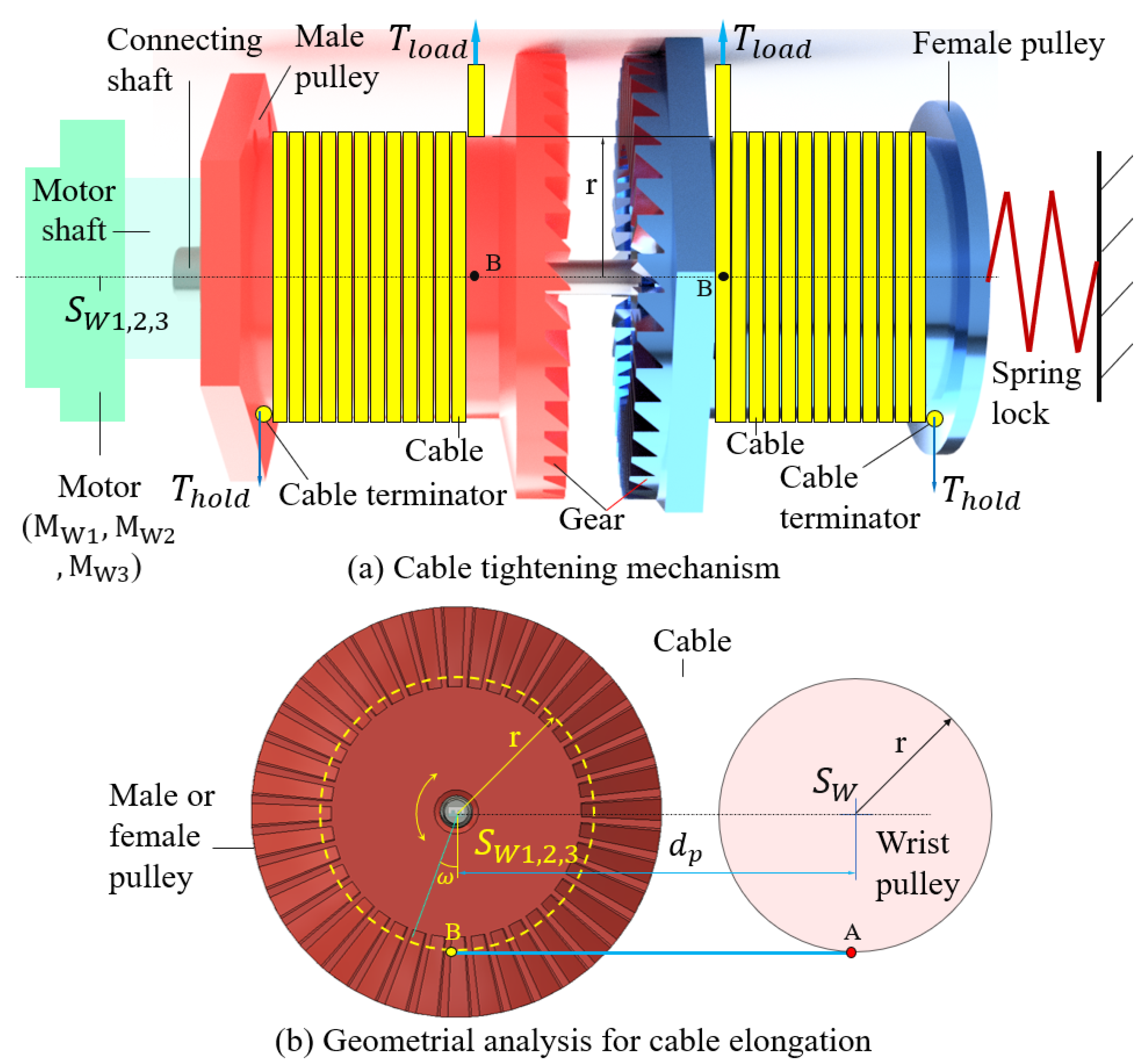
- Decoupling system: The design ensures that the length of each cable remains constant when the forearm and wrist rotate around their hinge joints. Compared with [40], our design achieves less vibration as the cables move due to no compensating spring in our decoupling mechanism. Additionally, the cable is wound around the tightening pulley approximately 10 times before reaching the termination point, which enhances the creep performance of the cable and improves the durability of the cable tension.
- This mechanism enables tighter cable adjustments with greater durability and allows users to re-tension cables after a period of use. This feature enhances reliability and maintains the operational accuracy of the robotic arm. It represents a novel improvement compared with [40,41,43,44], where cable ends were secured with bolts.
2. Design of Cable-Driven Robot Arm
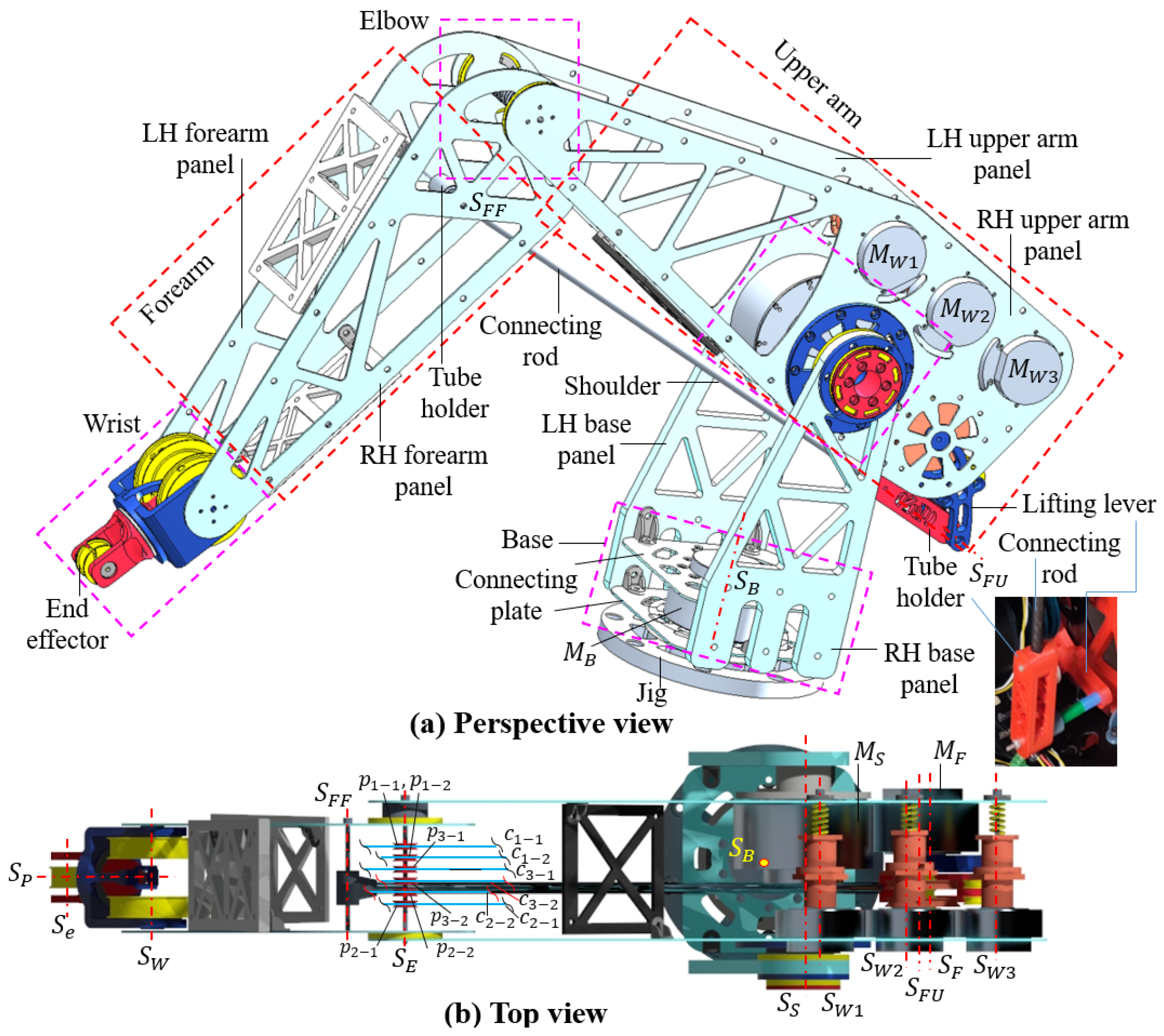
2.1. Main Frame
2.2. Wrist
2.3. Cable Tightening Mechanism
2.4. Decoupling Mechanism
3. Kinetics of the Robot Arm
4. Results
4.1. Fabrication
4.2. Electrical Design
4.3. Testing Configuration of the Robot Arm
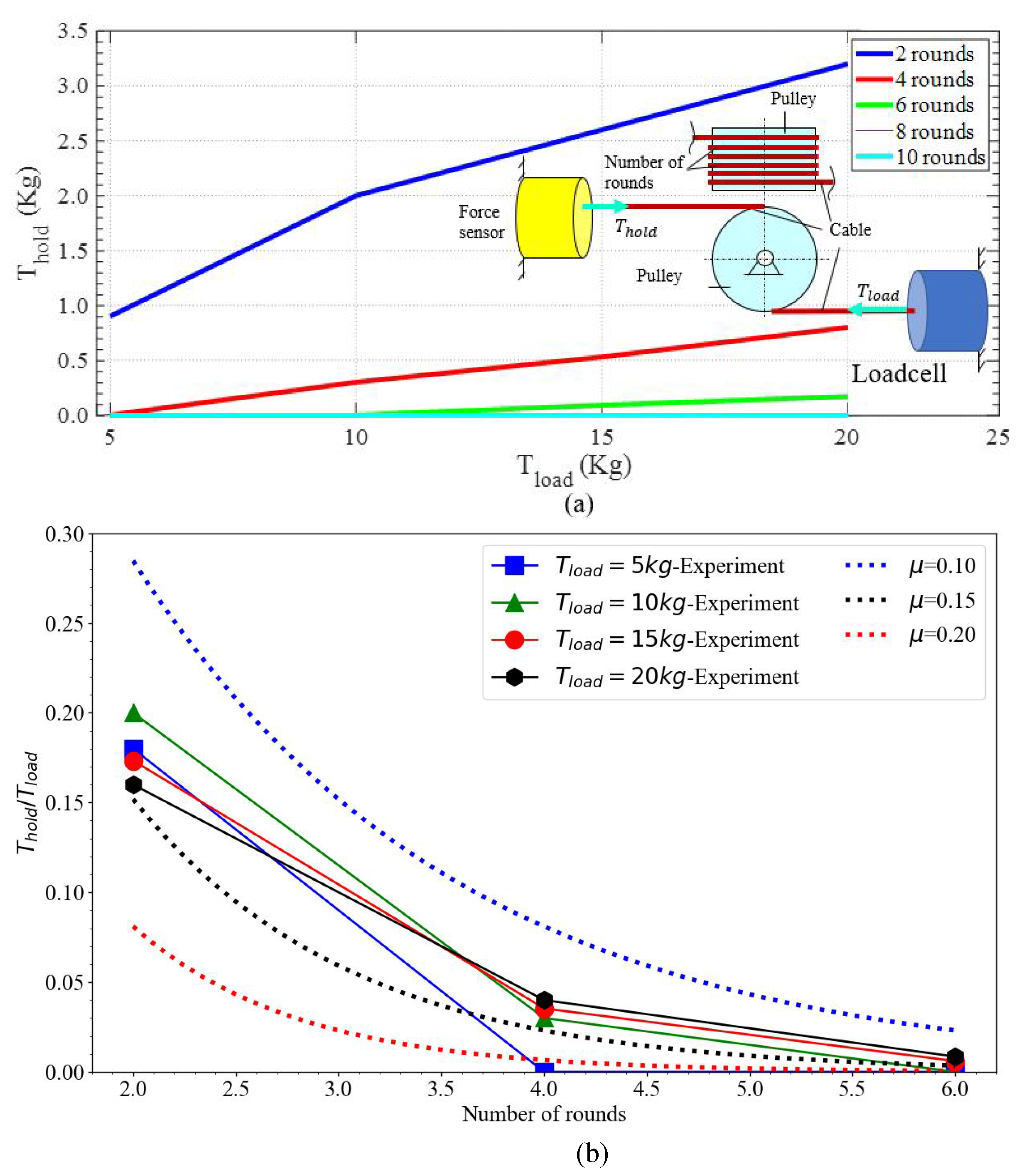
4.3.1. Loading Test
4.3.2. Cable Durability Test
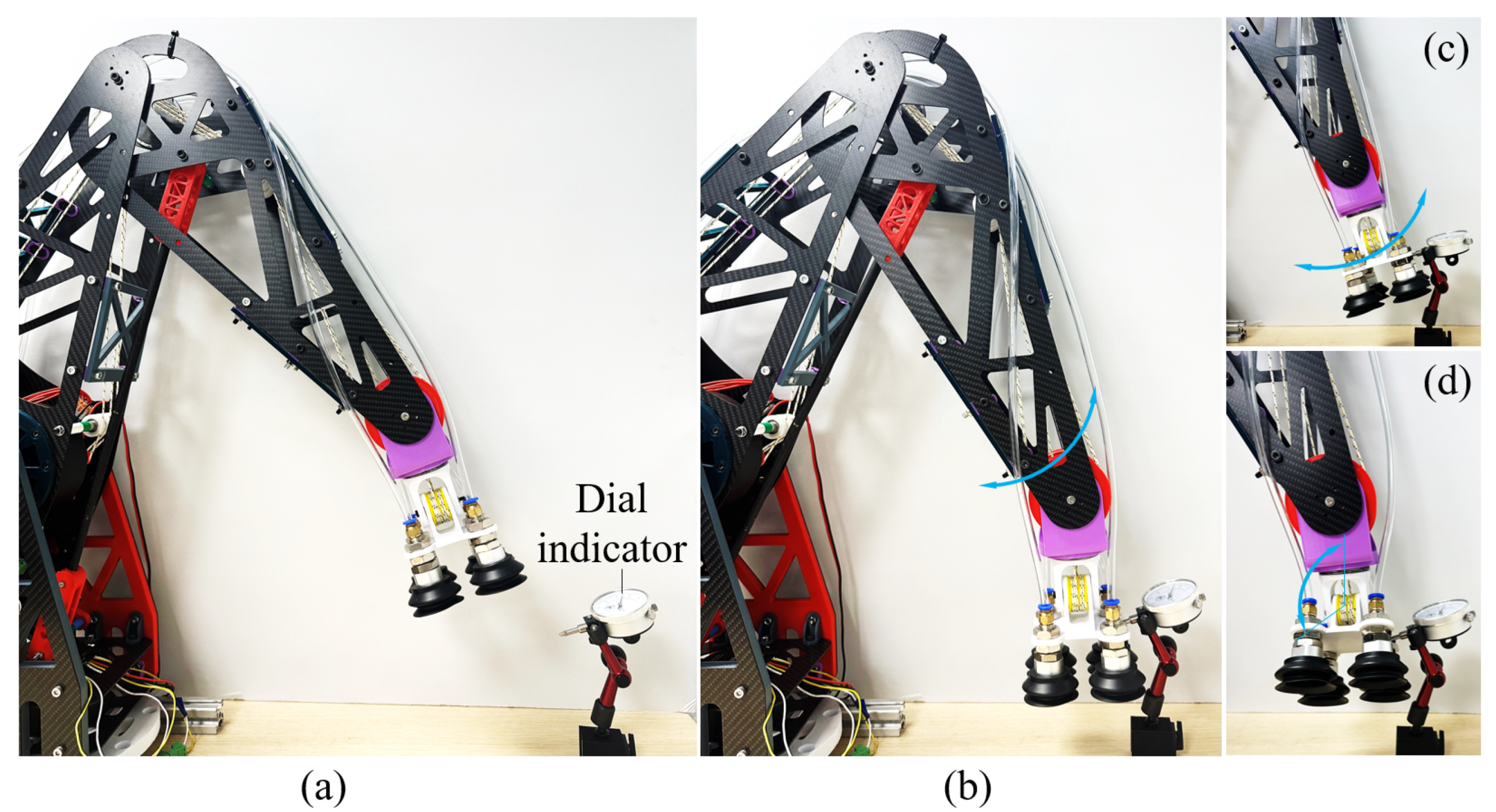
4.3.3. Repeatability
5. Conclusions
6. Patents
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- AboZaid, Y.A.; Aboelrayat, M.T.; Fahim, I.S.; Radwan, A.G. Soft robotic grippers: A review on technologies, materials, and applications. Sens. Actuators A Phys. 2024, 372, 115380. [Google Scholar] [CrossRef]
- Nguyen, V.P.; Dhyan, S.B.; Mai, V.; Han, B.S.; Chow, W.T. Bioinspiration and Biomimetic Art in Robotic Grippers. Micromachines 2023, 14, 1772. [Google Scholar] [CrossRef] [PubMed]
- Qu, J.; Yu, Z.; Tang, W.; Xu, Y.; Mao, B.; Zhou, K. Advanced Technologies and Applications of Robotic Soft Grippers. Adv. Mater. Technol. 2024, 9, 2301004. [Google Scholar] [CrossRef]
- Goh, G.L.; Goh, G.D.; Toh, W.; Lee, S.; Li, X.; Sunil; Lim, J.Y.; Li, Z.; Sinha, A.K.; Yeong, W.Y.; et al. A 3D Printing-Enabled Artificially Innervated Smart Soft Gripper with Variable Joint Stiffness. Adv. Mater. Technol. 2023, 8, 2301426. [Google Scholar] [CrossRef]
- Lv, N.; Liu, J.; Jia, Y. Dynamic Modeling and Control of Deformable Linear Objects for Single-Arm and Dual-Arm Robot Manipulations. IEEE Trans. Robot. 2022, 38, 2341–2353. [Google Scholar] [CrossRef]
- Van Nguyen, P.; Ho, V.A. Wet Adhesion of Soft Curved Interfaces with Micro Pattern. IEEE Robot. Autom. Lett. 2021, 6, 4273–4280. [Google Scholar] [CrossRef]
- Hofer, M.; Zughaibi, J.; D’Andrea, R. Design and Control of an Inflatable Spherical Robotic Arm for Pick and Place Applications. Actuators 2021, 10, 299. [Google Scholar] [CrossRef]
- Nguyen, P.V.; Ho, V.A. Grasping Interface with Wet Adhesion and Patterned Morphology: Case of Thin Shell. IEEE Robot. Autom. Lett. 2019, 4, 792–799. [Google Scholar] [CrossRef]
- Yang, S.; Xu, S. Accuracy of autonomous robotic surgery for single-tooth implant placement: A case series. J. Dent. 2023, 132, 104451. [Google Scholar] [CrossRef]
- Xu, Z.; Xiao, Y.; Zhou, L.; Lin, Y.; Su, E.; Chen, J.; Wu, D. Accuracy and efficiency of robotic dental implant surgery with different human-robot interactions: An in vitro study. J. Dent. 2023, 137, 104642. [Google Scholar] [CrossRef]
- Trute, R.J.; Zapico, C.S.; Christou, A.; Layeghi, D.; Craig, S.; Erden, M.S. Development of a Robotic Surgery Training System. Front. Robot. AI 2022, 8, 773830. [Google Scholar] [CrossRef] [PubMed]
- Kaleem, A.; Hussain, S.; Aqib, M.; Cheema, M.J.M.; Saleem, S.R.; Farooq, U. Development Challenges of Fruit-Harvesting Robotic Arms: A Critical Review. AgriEngineering 2023, 5, 2216–2237. [Google Scholar] [CrossRef]
- Morar, C.A.; Doroftei, I.A.; Doroftei, I.; Hagan, M.G. Robotic applications on agricultural industry. A review. IOP Conf. Ser. Mater. Sci. Eng. 2020, 997, 012081. [Google Scholar] [CrossRef]
- Yoshida, T.; Onishi, Y.; Kawahara, T.; Fukao, T. Automated harvesting by a dual-arm fruit harvesting robot. ROBOMECH J. 2022, 9, 19. [Google Scholar] [CrossRef]
- Nguyen, V.P. Picking food by robot hand with tree-frog like pad in various wet conditions. Eng. Res. Express 2024, 6, 015086. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, Q.; Xu, W.; Wang, L.; Zhou, Z. Robot learning towards smart robotic manufacturing: A review. Robot. Comput.-Integr. Manuf. 2022, 77, 102360. [Google Scholar] [CrossRef]
- Barosz, P.; Gołda, G.; Kampa, A. Efficiency Analysis of Manufacturing Line with Industrial Robots and Human Operators. Appl. Sci. 2020, 10, 2862. [Google Scholar] [CrossRef]
- Weidemann, C.; Mandischer, N.; van Kerkom, F.; Corves, B.; Hüsing, M.; Kraus, T.; Garus, C. Literature Review on Recent Trends and Perspectives of Collaborative Robotics in Work 4.0. Robotics 2023, 12, 84. [Google Scholar] [CrossRef]
- Nguyen, P.V.; Nguyen, P.N.; Nguyen, T.; Le, T.L. Hybrid robot hand for stably manipulating one group objects. Arch. Mech. Eng. 2022, 69, 375–391. [Google Scholar] [CrossRef]
- Hernandez-Barraza, L.; Kalil-Khan, A.; Yeow, R.C.H. A bioinspired modular soft robotic arm. Eng. Res. Express 2023, 5, 015021. [Google Scholar] [CrossRef]
- Ouyang, W.; He, L.; Albini, A.; Maiolino, P. A Modular Soft Robotic Arm with Embedded Tactile Sensors for Proprioception. In Proceedings of the 2022 IEEE 5th International Conference on Soft Robotics (RoboSoft), Edinburgh, UK, 4–8 April 2022; pp. 919–924. [Google Scholar]
- Zhang, Y.; Liao, J.; Chen, M.; Li, X.; Jin, G. A multi-module soft robotic arm with soft actuator for minimally invasive surgery. Int. J. Med Robot. Comput. Assist. Surg. 2023, 19, e2467. [Google Scholar] [CrossRef] [PubMed]
- Xie, Z.; Yuan, F.; Liu, J.; Tian, L.; Chen, B.; Fu, Z.; Mao, S.; Jin, T.; Wang, Y.; He, X.; et al. Octopus-inspired sensorized soft arm for environmental interaction. Sci. Robot. 2023, 8, eadh7852. [Google Scholar] [CrossRef]
- Deshpande, S.; Almubarak, Y. Octopus-Inspired Robotic Arm Powered by Shape Memory Alloys (SMA). Actuators 2023, 12, 377. [Google Scholar] [CrossRef]
- Tang, S.; Tang, K.; Wu, S.; Xiao, Y.; Liu, S.; Yi, J.; Wang, Z. Performance enhancement of the soft robotic segment for a trunk-like arm. Front. Robot. AI 2023, 10, 1210217. [Google Scholar] [CrossRef] [PubMed]
- Xu, Y. Path planning and intelligent control of a soft robot arm based on gas-structure coupling actuators. Front. Mater. 2022, 9, 1052538. [Google Scholar] [CrossRef]
- Rao, P.; Peyron, Q.; Lilge, S.; Burgner-Kahrs, J. How to Model Tendon-Driven Continuum Robots and Benchmark Modelling Performance. Front. Robot. AI 2021, 7, 630245. [Google Scholar] [CrossRef] [PubMed]
- Gong, Z.; Wen, L. An Opposite-Bending-and-Extension Soft Robotic Manipulator for Delicate Grasping in Shallow Water. Front. Robot. AI 2019, 6, 26. [Google Scholar] [CrossRef] [PubMed]
- Su, H. Pneumatic Soft Robots: Challenges and Benefits. Actuators 2022, 11, 92. [Google Scholar] [CrossRef]
- Xie, Q.; Wang, T.; Zhu, S. Simplified dynamical model and experimental verification of an underwater hydraulic soft robotic arm. Smart Mater. Struct. 2022, 31, 075011. [Google Scholar] [CrossRef]
- Qian, S.T. A Review on Cable-driven Parallel Robots. Chin. J. Mech. Eng. 2018, 31, 66. [Google Scholar] [CrossRef]
- Lum, G.; Yeo, S. Design and motion control of a cable-driven dexterous robotic arm. In Proceedings of the 2010 IEEE Conference on Sustainable Utilization and Development in Engineering and Technology, Kuala Lumpur, Malaysia, 20–21 November 2010. [Google Scholar]
- Wang, Y.; Yang, G.; Zheng, T.; Shen, W.; Fang, Z.; Zhang, C. Tension reduction method for a modular cable-driven robotic arm with co-shared cables. Intell. Serv. Robot. 2022, 15, 3410–3425. [Google Scholar] [CrossRef]
- Yuan, H.; Li, Z. Workspace analysis of cable-driven continuum manipulators based on static model. Robot. Comput.-Integr. Manuf. 2018, 49, 240–252. [Google Scholar] [CrossRef]
- Yeshmukhametov, A.; Koganezawa, K.; Yamamoto, Y. A Novel Discrete Wire-Driven Continuum Robot Arm with Passive Sliding Disc: Design, Kinematics and Passive Tension Control. Robotics 2019, 8, 51. [Google Scholar] [CrossRef]
- Wei, D.; Zhou, J.; Zhu, Y.; Ma, J.; Ma, S. Axis-space framework for cable-driven soft continuum robot Zou2017control via reinforcement learning. Commun. Eng. 2023, 2, 61. [Google Scholar] [CrossRef]
- Tang, J.; Tao, H.; Zhuang, X.; Cheng, Y.; Xiao, H.; Xu, K.; Ding, X. Design and analysis of cable-driven robotic arm with variable stiffness modular joint. In Proceedings of the 2022 IEEE International Conference on Robotics and Biomimetics (ROBIO), Jinghong, China, 5–9 December 2022; pp. 1843–1848. [Google Scholar]
- Yang, K.; Yang, G.; Zhang, C.; Chen, C.; Zheng, T.; Cui, Y.; Chen, T. Cable Tension Analysis Oriented the Enhanced Stiffness of a 3-DOF Joint Module of a Modular Cable-Driven Human-Like Robotic Arm. Appl. Sci. 2020, 10, 8871. [Google Scholar] [CrossRef]
- Chen, Q.; Qin, Y.; Li, G. QPSO-MPC based tracking algorithm for cable-driven continuum robots. Front. Neurorobot. 2022, 16, 1014163. [Google Scholar] [CrossRef]
- Choi, K.; Park, F.C. A hybrid dynamic model for the AMBIDEX tendon-driven manipulator. Mechatronics 2020, 69, 102398. [Google Scholar] [CrossRef]
- Wang, B.; Zhang, T.; Chen, J.; Xu, W.; Wei, H.; Song, Y.; Guan, Y. A modular cable-driven humanoid arm with anti-parallelogram mechanisms and Bowden cables. Front. Mech. Eng. 2023, 18, 6. [Google Scholar] [CrossRef]
- Wang, S.; Huang, Y.; Lee, W.W.; Liu, T.; Teng, X.; Zheng, Y.; Li, Q. A Robust Model Predictive Controller for Tactile Servoing. In Proceedings of the 2024 IEEE International Conference on Robotics and Automation (ICRA), Yokohama, Japan, 13–17 May 2024; pp. 13848–13854. [Google Scholar]
- Nguyen, V.P.; Bohra Dhyan, S.; Hoang, C.C.; Siew Han, B.; Tan, J.Y.; Tuck Chow, W. Mitigate Inertia for Wrist and Forearm Towards Safe Interaction in 5-DOF Cable-Driven Robot Arm. In Proceedings of the 2023 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Seattle, WA, USA, 28–30 June 2023; pp. 215–220. [Google Scholar]
- Nguyen, V.P.; Chow, W.T. Wiring-Claw Gripper for Soft-Stable Picking up Multiple Objects. IEEE Robot. Autom. Lett. 2023, 8, 3972–3979. [Google Scholar] [CrossRef]
- Jiang, S.; Hua, D.; Wang, Y.; Ju, F.; Yin, L.; Chen, B. Design and modeling of motion-decoupling mechanism for cable-driven joints. Adv. Mech. Eng. 2018, 10, 1687814018777428. [Google Scholar] [CrossRef]
- Nguyen, V.P.; Dhyan, S.B.; Han, B.S.; Chow, W.T. Universally Grasping Objects with Granular—Tendon Finger: Principle and Design. Micromachines 2023, 14, 1471. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, P.V.; Sunil, D.B.; Chow, W.T. Soft-stable interface in grasping multiple objects by wiring-tension. Sci. Rep. 2020, 13, 21537. [Google Scholar] [CrossRef]
- Goh, G.L.; Huang, X.; Toh, W.; Li, Z.; Lee, S.; Yeong, W.Y.; Ng, T.Y. Joint angle prediction for a cable-driven gripper with variable joint stiffness through numerical modeling and machine learning. Int. J. AI Mater. Des. 2024, 1, 62. [Google Scholar] [CrossRef]
- Liu, T.; Hao, G. Design of a Cylindrical Compliant Linear Guide with Decoupling Parallelogram Mechanisms. Micromachines 2022, 13, 1275. [Google Scholar] [CrossRef] [PubMed]
- Mustafa, S.K.; Yang, G.; Yeo, S.H.; Lin, W.; Chen, I.M. Self-Calibration of a Biologically Inspired 7 DOF Cable-Driven Robotic Arm. IEEE/ASME Trans. Mechatron. 2008, 13, 66–75. [Google Scholar] [CrossRef]
- Gaoyu, L.; Wei-Hsin, L. A self-powered magnetoelectric 3D tactile sensor with adjustable sensitivity for robot arms. Sensors Actuators Phys. 2024, 374, 115455. [Google Scholar]
- Van Nguyen, P.; Pham, V.C.; Tan, Y.; Ho, V.A. Toward a Tactile Ontology for Semantic Interoperability of the Tactile Internet. In Proceedings of the 2022 IEEE 16th International Conference on Semantic Computing (ICSC), Laguna Hills, CA, USA, 26–28 January 2022; pp. 115–118. [Google Scholar]
- Zou, L.; Ge, C.; Wang, Z.J.; Cretu, E.; Li, X. Novel Tactile Sensor Technology and Smart Tactile Sensing Systems: A Review. Sensors 2017, 17, 2653. [Google Scholar] [CrossRef]
- Nguyen, T.N.; Lee, J. Load-Carrying Capacity of Ultra-Thin Shells with and without CNTs Reinforcement. Mathematics 2022, 10, 1481. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Link | ||||
|---|---|---|---|---|
| Base | 0 | 0 | ||
| Upper arm | 0 | |||
| Forearm | 0 | 0 | ||
| Wrist1 | 0 | 0 | ||
| Wrist2 | 0 | 0 | ||
| Wrist3 | 0 | 0 | 0 |
| = |
| = |
| = |
| = |
| = |
| = |
| = |
| = |
| = |
| = |
| = |
| = |
| Testing position | payload | 1 kg | 2 kg | 3 kg | 4 kg | 5 kg |
| (rpm) | 7.5 | 33.3 | 55 | 66.7 | 83.3 |
| S. No | LH-Wrist | RH-Wrist | Both Wrist | Robot Arm |
|---|---|---|---|---|
| 1 | 0.38 | 0.39 | 0.37 | 0.35 |
| 2 | 0.38 | 0.39 | 0.37 | 0.35 |
| 3 | 0.37 | 0.39 | 0.37 | 0.35 |
| 4 | 0.38 | 0.38 | 0.37 | 0.35 |
| 5 | 0.37 | 0.39 | 0.37 | 0.34 |
| 6 | 0.38 | 0.37 | 0.37 | 0.35 |
| 7 | 0.38 | 0.38 | 0.37 | 0.35 |
| 8 | 0.38 | 0.39 | 0.37 | 0.35 |
| 9 | 0.36 | 0.38 | 0.37 | 0.34 |
| 10 | 0.38 | 0.39 | 0.37 | 0.35 |
| 11 | 0.38 | 0.39 | 0.37 | 0.36 |
| 12 | 0.38 | 0.39 | 0.37 | 0.35 |
| 13 | 0.36 | 0.39 | 0.37 | 0.35 |
| 14 | 0.38 | 0.38 | 0.37 | 0.35 |
| 15 | 0.38 | 0.39 | 0.37 | 0.35 |
| Std dev | 0.007 | 0.006 | 0.000 | 0.005 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, V.P.; Chow, W.T.; Dhyan, S.B.; Zhang, B.; Han, B.S.; Wong, H.Y.A. Low-Cost Cable-Driven Robot Arm with Low-Inertia Movement and Long-Term Cable Durability. Robotics 2024, 13, 128. https://doi.org/10.3390/robotics13090128
Nguyen VP, Chow WT, Dhyan SB, Zhang B, Han BS, Wong HYA. Low-Cost Cable-Driven Robot Arm with Low-Inertia Movement and Long-Term Cable Durability. Robotics. 2024; 13(9):128. https://doi.org/10.3390/robotics13090128
Chicago/Turabian StyleNguyen, Van Pho, Wai Tuck Chow, Sunil Bohra Dhyan, Bohan Zhang, Boon Siew Han, and Hong Yee Alvin Wong. 2024. "Low-Cost Cable-Driven Robot Arm with Low-Inertia Movement and Long-Term Cable Durability" Robotics 13, no. 9: 128. https://doi.org/10.3390/robotics13090128
APA StyleNguyen, V. P., Chow, W. T., Dhyan, S. B., Zhang, B., Han, B. S., & Wong, H. Y. A. (2024). Low-Cost Cable-Driven Robot Arm with Low-Inertia Movement and Long-Term Cable Durability. Robotics, 13(9), 128. https://doi.org/10.3390/robotics13090128