
A Framework for Enhanced Human–Robot Collaboration during Disassembly Using Digital Twin and Virtual Reality

 , ,
, ,  ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
1.1. Challenges within Human–Robot Collaboration
1.2. Digital Twin
1.3. Virtual Reality
- We developed a system architecture integrating digital twin and VR to enhance human–robot collaborative systems.
- We implemented a prototype that allows users to simulate and optimize disassembly tasks in a safe, virtual environment.
- We applied the framework in a case study to disassemble antenna amplifiers.
- We demonstrated important aspects of human–robot collaboration, such as task distribution and safety issues.
- We demonstrated the framework for use in system configuration, training, and operational monitoring.
2. State of the Art
2.1. Robot Simulation Limitations
2.2. Digital Twin Technologies
2.3. Virtual Reality for Digital Twins
2.4. Safety in Human–Robot Collaboration
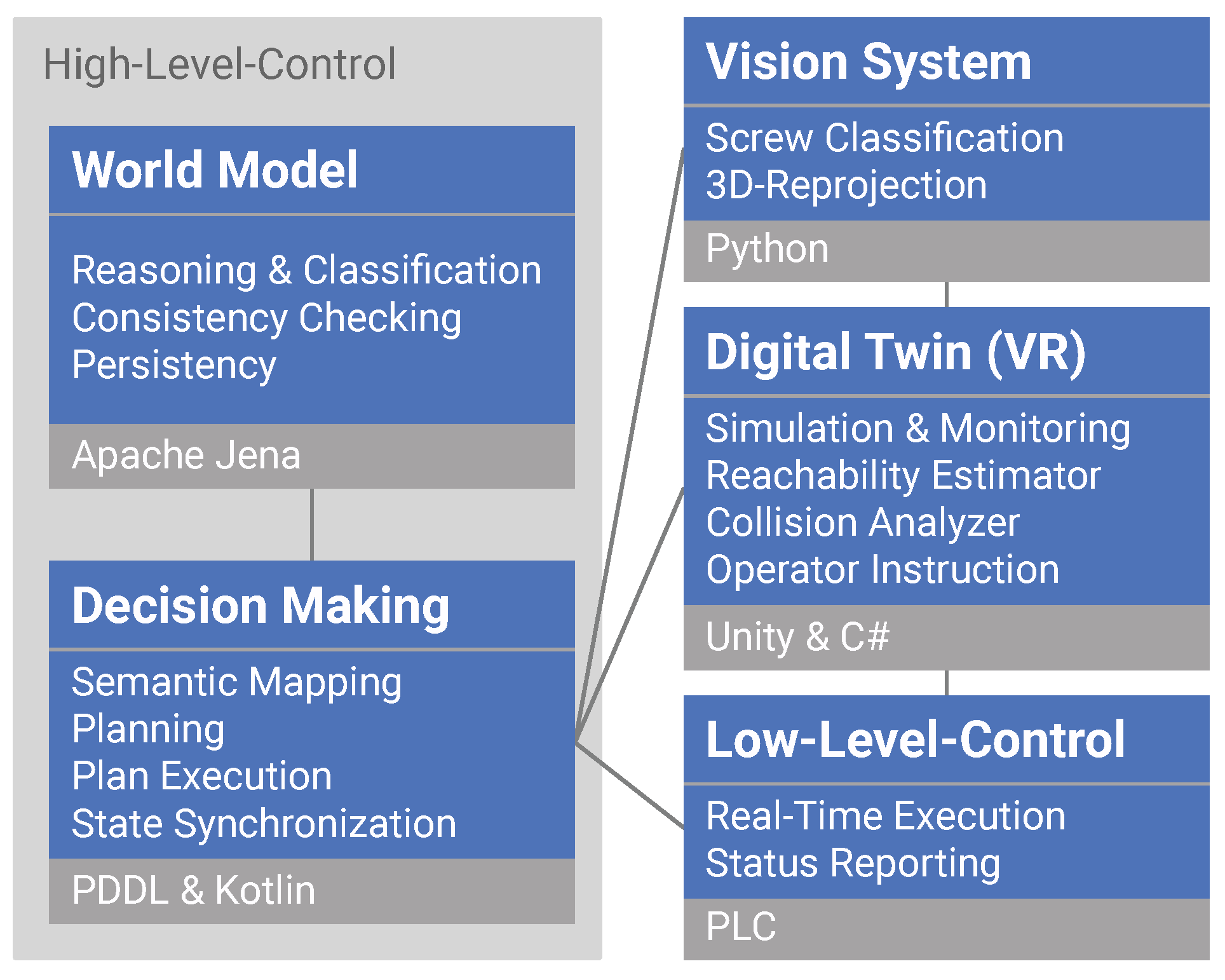
3. System Overview
3.1. World Model
3.2. Vision System
3.3. Decision Making
3.4. Execution
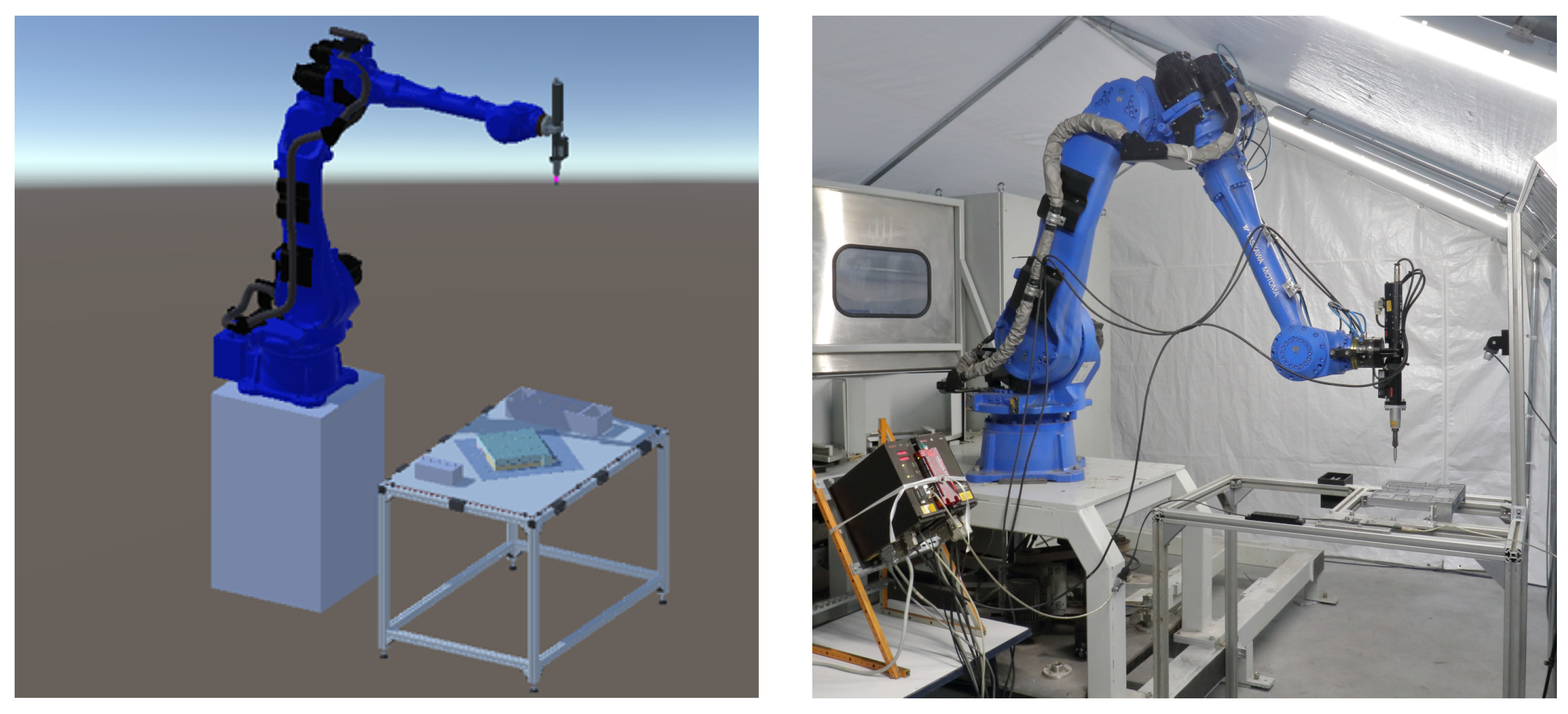
3.5. Digital Twin
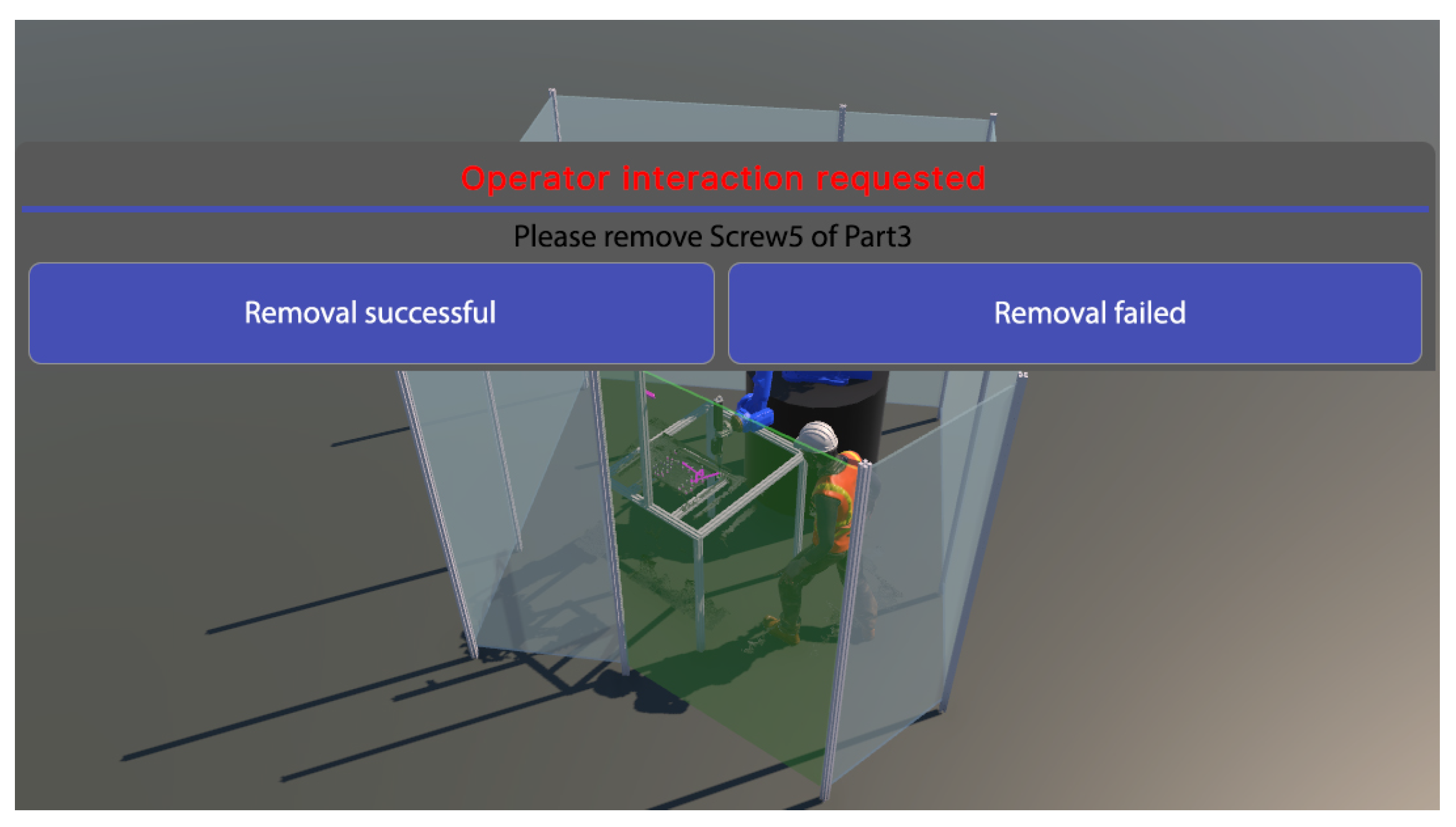
3.6. Virtual Reality Interface
3.7. Message Middleware
4. System Functionalities
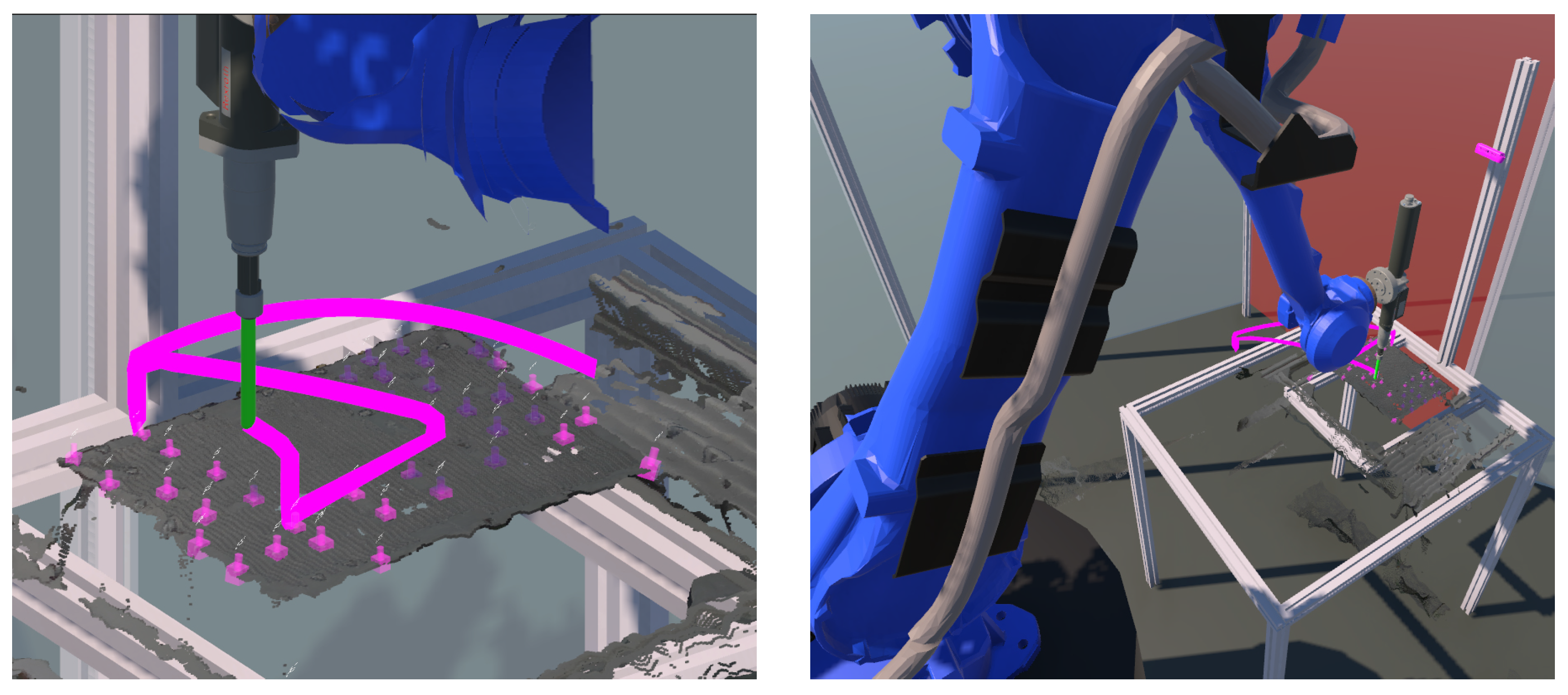
4.1. Reachability and Placement Analysis
4.2. Program Testing
4.3. Task Communication
4.4. Collision Avoidance
5. Case Study
5.1. Development of the Virtual Environment
5.2. Preparation Phase with Digital Twin
5.3. Execution Phase
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Poschmann, H.; Brüggemann, H.; Goldmann, D. Disassembly 4.0: A Review on Using Robotics in Disassembly Tasks as a Way of Automation. Chem. Ing. Tech. 2020, 92, 341–359. [Google Scholar] [CrossRef]
- Foo, G.; Kara, S.; Pagnucco, M. Challenges of robotic disassembly in practice. Procedia CIRP 2022, 105, 513–518. [Google Scholar] [CrossRef]
- Aheleroff, S.; Mostashiri, N.; Xu, X.; Zhong, R.Y. Mass Personalisation as a Service in Industry 4.0: A Resilient Response Case Study. Adv. Eng. Inform. 2021, 50, 101438. [Google Scholar] [CrossRef]
- Hjorth, S.; Chrysostomou, D. Human–robot collaboration in industrial environments: A literature review on non-destructive disassembly. Robot.-Comput.-Integr. Manuf. 2022, 73, 102208. [Google Scholar] [CrossRef]
- Lee, M.L.; Liang, X.; Hu, B.; Onel, G.; Behdad, S.; Zheng, M. A Review of Prospects and Opportunities in Disassembly with Human–Robot Collaboration. J. Manuf. Sci. Eng. 2023, 146, 020902. [Google Scholar] [CrossRef]
- Um, J.; Weyer, S.; Quint, F. Plug-and-Simulate within Modular Assembly Line enabled by Digital Twins and the use of AutomationML. IFAC-PapersOnLine 2017, 50, 15904–15909. [Google Scholar] [CrossRef]
- Weichhart, G.; Åkerman, M.; Akkaladevi, S.C.; Plasch, M.; Fast-Berglund, Å; Pichler, A. Models for Interoperable Human Robot Collaboration. IFAC-PapersOnLine 2018, 51, 36–41. [Google Scholar] [CrossRef]
- Villani, V.; Pini, F.; Leali, F.; Secchi, C. Survey on human–robot collaboration in industrial settings: Safety, intuitive interfaces and applications. Mechatronics 2018, 55, 248–266. [Google Scholar] [CrossRef]
- Krot, K.; Kutia, V. Intuitive Methods of Industrial Robot Programming in Advanced Manufacturing Systems. In Proceedings of the Intelligent Systems in Production Engineering and Maintenance; Burduk, A., Chlebus, E., Nowakowski, T., Tubis, A., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 205–214. [Google Scholar] [CrossRef]
- Pérez, L.; Diez, E.; Usamentiaga, R.; García, D.F. Industrial robot control and operator training using virtual reality interfaces. Comput. Ind. 2019, 109, 114–120. [Google Scholar] [CrossRef]
- Buerkle, A.; Eaton, W.; Al-Yacoub, A.; Zimmer, M.; Kinnell, P.; Henshaw, M.; Coombes, M.; Chen, W.H.; Lohse, N. Towards industrial robots as a service (IRaaS): Flexibility, usability, safety and business models. Robot.-Comput.-Integr. Manuf. 2023, 81, 102484. [Google Scholar] [CrossRef]
- Liu, Q.; Leng, J.; Yan, D.; Zhang, D.; Wei, L.; Yu, A.; Zhao, R.; Zhang, H.; Chen, X. Digital twin-based designing of the configuration, motion, control, and optimization model of a flow-type smart manufacturing system. J. Manuf. Syst. 2021, 58, 52–64. [Google Scholar] [CrossRef]
- Tavares, P.; Silva, J.A.; Costa, P.; Veiga, G.; Moreira, A.P. Flexible Work Cell Simulator Using Digital Twin Methodology for Highly Complex Systems in Industry 4.0. In Proceedings of the ROBOT 2017: Third Iberian Robotics Conference; Ollero, A., Sanfeliu, A., Montano, L., Lau, N., Cardeira, C., Eds.; Springer International Publishing: Cham, Switzerland, 2018; Volume 11, pp. 541–552. [Google Scholar] [CrossRef]
- Segovia, M.; Garcia-Alfaro, J. Design, Modeling and Implementation of Digital Twins. Sensors 2022, 22, 5396. [Google Scholar] [CrossRef]
- Hu, W.; Zhang, T.; Deng, X.; Liu, Z.; Tan, J. Digital twin: A state-of-the-art review of its enabling technologies, applications and challenges. J. Intell. Manuf. Spec. Equip. 2021, 2, 1–34. [Google Scholar] [CrossRef]
- Mihai, S.; Yaqoob, M.; Hung, D.V.; Davis, W.; Towakel, P.; Raza, M.; Karamanoglu, M.; Barn, B.; Shetve, D.; Prasad, R.V.; et al. Digital Twins: A Survey on Enabling Technologies, Challenges, Trends and Future Prospects. IEEE Commun. Surv. Tutor. 2022, 24, 2255–2291. [Google Scholar] [CrossRef]
- Gallala, A.; Kumar, A.A.; Hichri, B.; Plapper, P. Digital Twin for Human–Robot Interactions by Means of Industry 4.0 Enabling Technologies. Sensors 2022, 22, 4950. [Google Scholar] [CrossRef]
- Lee, C.G.; Park, S.C. Survey on the virtual commissioning of manufacturing systems. J. Comput. Des. Eng. 2014, 1, 213–222. [Google Scholar] [CrossRef]
- Ramasubramaniana, A.K.; Mathew, R.; Kelly, M.; Hargaden, V.; Papakostas, N. Digital Twin for Human–Robot Collaboration in Manufacturing: Review and Outlook. Appl. Sci. 2022, 12, 4811. [Google Scholar] [CrossRef]
- Pires, F.; Cachada, A.; Barbosa, J.; Moreira, A.P.; Leitão, P. Digital Twin in Industry 4.0: Technologies, Applications and Challenges. In Proceedings of the 2019 IEEE 17th International Conference on Industrial Informatics (INDIN), Helsinki, Finland, 22–25 July 2019; Volume 1, pp. 721–726. [Google Scholar] [CrossRef]
- Lu, Y.; Liu, C.; Wang, K.I.K.; Huang, H.; Xu, X. Digital Twin-driven smart manufacturing: Connotation, reference model, applications and research issues. Robot.-Comput.-Integr. Manuf. 2020, 61, 101837. [Google Scholar] [CrossRef]
- Havard, V.; Jeanne, B.; Lacomblez, M.; Baudry, D. Digital twin and virtual reality: A co-simulation environment for design and assessment of industrial workstations. Prod. Manuf. Res. 2019, 7, 472–489. [Google Scholar] [CrossRef]
- Yap, I.D.H.J.; Taha, Z.; Vui, L. VR-Based Robot Programming and Simulation System for an Industrial Robot. Int. J. Ind. Eng. Theory Appl. Pract. 2008, 15, 314–322. [Google Scholar]
- Dianatfar, M.; Latokartano, J.; Lanz, M. Review on existing VR/AR solutions in human–robot collaboration. Procedia CIRP 2021, 97, 407–411. [Google Scholar] [CrossRef]
- Oyekan, J.O.; Hutabarat, W.; Tiwari, A.; Grech, R.; Aung, M.H.; Mariani, M.P.; López-Dávalos, L.; Ricaud, T.; Singh, S.; Dupuis, C. The effectiveness of virtual environments in developing collaborative strategies between industrial robots and humans. Robot.-Comput.-Integr. Manuf. 2019, 55, 41–54. [Google Scholar] [CrossRef]
- Gong, L.; Berglund, J.; Fast-Berglund, Å.; Johansson, B.; Wang, Z.; Börjesson, T. Development of virtual reality support to factory layout planning. Int. J. Interact. Des. Manuf. (Ijidem) 2019, 13, 935–945. [Google Scholar] [CrossRef]
- Wonsick, M.; Padir, T. A Systematic Review of Virtual Reality Interfaces for Controlling and Interacting with Robots. Appl. Sci. 2020, 10, 9051. [Google Scholar] [CrossRef]
- Castro, A.; Silva, F.; Santos, V. Trends of human–robot Collaboration in Industry Contexts: Handover, Learning, and Metrics. Sensors 2021, 21, 4113. [Google Scholar] [CrossRef]
- Galin, R.R.; Meshcheryakov, R.V. Human–robot Interaction Efficiency and human–robot Collaboration. In Robotics: Industry 4.0 Issues & New Intelligent Control Paradigms; Springer International Publishing: Cham, Switzerland, 2020; pp. 55–63. [Google Scholar] [CrossRef]
- Arents, J.; Abolins, V.; Judvaitis, J.; Vismanis, O.; Oraby, A.; Ozols, K. Human–Robot Collaboration Trends and Safety Aspects: A Systematic Review. J. Sens. Actuator Netw. 2021, 10, 48. [Google Scholar] [CrossRef]
- Kumičáková, D.; Rengevič, A. Automation of manufacturing technologies with utilisation of industrial robots. Appl. Comput. Sci. 2015, 11, 5–18. [Google Scholar]
- Collins, J.; Chand, S.; Vanderkop, A.; Howard, D. A Review of Physics Simulators for Robotic Applications. IEEE Access 2021, 9, 51416–51431. [Google Scholar] [CrossRef]
- Tsagaris, A.; Polychroniadis, C.; Tzotzis, A.; Kyratsis, P. Cost-effective Robotic Arm Simulation and System Verification. Int. J. Intell. Syst. Appl. 2024, 16, 1–12. [Google Scholar] [CrossRef]
- Sekala, A.; Kost, G.; Banas, W.; Gwiazda, A.; Grabowik, C. Modelling and simulation of robotic production systems. J. Phys. Conf. Ser. 2022, 2198, 012065. [Google Scholar] [CrossRef]
- Baizid, K.; Ćuković, S.; Iqbal, J.; Yousnadj, A.; Chellali, R.; Meddahi, A.; Devedzic, G.; Ghionea, I. IRoSim: Industrial Robotics Simulation Design Planning and Optimization Platform based on CAD and Knowledgeware Technologies. Robot.-Comput.-Integr. Manuf. 2016, 42, 121–134. [Google Scholar] [CrossRef]
- Gan, Y.; Dai, X.; Li, D. Off-Line Programming Techniques for Multirobot Cooperation System. Int. J. Adv. Robot. Syst. 2013, 10, 282. [Google Scholar] [CrossRef]
- Galindo, P.L.; Morgado-Estévez, A.; Aparicio, J.L.; Bárcena, G.; Soto-Núñez, J.A.; Chavera, P.; Abad Fraga, F.J. Development of a Customized Interface for a Robotic Welding Application at Navantia Shipbuilding Company. In Proceedings of the ROBOT 2017: Third Iberian Robotics Conference; Ollero, A., Sanfeliu, A., Montano, L., Lau, N., Cardeira, C., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 43–52. [Google Scholar]
- Borys, S.; Kaczmarek, W.; Laskowski, D.; Polak, R. Experimental Study of the Vibration of the Spot Welding Gun at a Robotic Station. Appl. Sci. 2022, 12, 12209. [Google Scholar] [CrossRef]
- Diprasetya, M.R.; Yuwono, S.; Löppenberg, M.; Schwung, A. Integration of ABB Robot Manipulators and Robot Operating System for Industrial Automation. In Proceedings of the 2023 IEEE 21st International Conference on Industrial Informatics (INDIN), Lemgo, Germany, 18–20 July 2023; pp. 1–7. [Google Scholar] [CrossRef]
- Li, G.; Li, Y.; Han, H. The Simulation Design of Robot Automatic Sorting and Palletizing Workstation Based on RobotStudio. In Proceedings of the 2022 5th International Conference on Robotics, Control and Automation Engineering (RCAE), Changchun, China, 28–30 October 2022; pp. 205–208. [Google Scholar] [CrossRef]
- Moura, F.M.; Silva, M.F. Application for automatic programming of palletizing robots. In Proceedings of the 2018 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Torres Vedras, Portugal, 25–27 April 2018; pp. 48–53. [Google Scholar] [CrossRef]
- Dragun, D.; Mascaro, S.; Blanchard, J.; Chauhan, V. Assembly Automation Using an Industrial Robot. In ASME International Mechanical Engineering Congress and Exposition; Volume 2B: Advanced Manufacturing; American Society of Mechanical Engineers: New York, NY, USA, 2022. [Google Scholar] [CrossRef]
- Santos, A.A.; Haladus, J.; Pereira, F.; Felgueiras, C.; Fazenda, R. Simulation Case Study for Improving Painting Tires Process Using the Fanuc Roboguide Software. In Proceedings of the Flexible Automation and Intelligent Manufacturing: Establishing Bridges for More Sustainable Manufacturing Systems; Silva, F.J.G., Pereira, A.B., Campilho, R.D.S.G., Eds.; Springer International Publishing: Cham, Switzerland, 2024; pp. 517–524. [Google Scholar]
- Lukac, D. Comparative Selection of Industrial Robot Simulation Systems for Educational Purposes. In Proceedings of the XV International Scientific–Professional Symposium INFOTEH-JAHORINA 2016, Sarajevo, Bosnia and Herzegovina, 20 March 2016. [Google Scholar]
- Huang, Z.; Shen, Y.; Li, J.; Fey, M.; Brecher, C. A Survey on AI-Driven Digital Twins in Industry 4.0: Smart Manufacturing and Advanced Robotics. Sensors 2021, 21, 6340. [Google Scholar] [CrossRef]
- Shafto, M.; Conroy, M.; Doyle, R.; Glaessgen, E.; Kemp, C.; LeMoigne, J.; Wang, L. Modeling, Simulation, Information Technology and Processing Roadmap. NASA 2010, 11, 1–32. [Google Scholar]
- Liu, M.; Fang, S.; Dong, H.; Xu, C. Review of digital twin about concepts, technologies, and industrial applications. J. Manuf. Syst. 2021, 58, 346–361. [Google Scholar] [CrossRef]
- Aheleroff, S.; Xu, X.; Zhong, R.Y.; Lu, Y. Digital Twin as a Service (DTaaS) in Industry 4.0: An Architecture Reference Model. Adv. Eng. Inform. 2021, 47, 101225. [Google Scholar] [CrossRef]
- Mazumder, A.; Sahed, M.; Tasneem, Z.; Das, P.; Badal, F.; Ali, M.; Ahamed, M.; Abhi, S.; Sarker, S.; Das, S.; et al. Towards next generation digital twin in robotics: Trends, scopes, challenges, and future. Heliyon 2023, 9, e13359. [Google Scholar] [CrossRef] [PubMed]
- Malik, A.A.; Brem, A. Digital twins for collaborative robots: A case study in human–robot interaction. Robot.-Comput.-Integr. Manuf. 2021, 68, 102092. [Google Scholar] [CrossRef]
- Yao, B.; Xu, W.; Shen, T.; Ye, X.; Tian, S. Digital twin-based multi-level task rescheduling for robotic assembly line. Sci. Rep. 2023, 13, 1769. [Google Scholar] [CrossRef]
- Ottogalli, K.; Rosquete, D.; Amundarain, A.; Aguinaga, I.; Borro, D. Flexible Framework to Model Industry 4.0 Processes for Virtual Simulators. Appl. Sci. 2019, 9, 4983. [Google Scholar] [CrossRef]
- Weistroffer, V.; Keith, F.; Bisiaux, A.; Andriot, C.; Lasnier, A. Using Physics-Based Digital Twins and Extended Reality for the Safety and Ergonomics Evaluation of Cobotic Workstations. Front. Virtual Real. 2022, 3, 781830. [Google Scholar] [CrossRef]
- Dimitrokalli, A.; Vosniakos, G.C.; Nathanael, D.; Matsas, E. On the assessment of human–robot collaboration in mechanical product assembly by use of Virtual Reality. Procedia Manuf. 2020, 51, 627–634. [Google Scholar] [CrossRef]
- Garg, G.; Kuts, V.; Anbarjafari, G. Digital Twin for FANUC Robots: Industrial Robot Programming and Simulation Using Virtual Reality. Sustainability 2021, 13, 10336. [Google Scholar] [CrossRef]
- Burghardt, A.; Szybicki, D.; Gierlak, P.; Kurc, K.; Pietruś, P.; Cygan, R. Programming of Industrial Robots Using Virtual Reality and Digital Twins. Appl. Sci. 2020, 10, 486. [Google Scholar] [CrossRef]
- Kuts, V.; Otto, T.; Tähemaa, T.; Bondarenko, Y. Digital twin based synchronised control and simulation of the industrial robotic cell using virtual reality. J. Mach. Eng. 2019, 19, 128–145. [Google Scholar] [CrossRef]
- Perez, L.; Rodríguez-Jiménez, S.; Rodríguez, N.; Usamentiaga, R.; Garcia, F.D. Digital Twin and Virtual Reality Based Methodology for Multi-Robot Manufacturing Cell Commissioning. Appl. Sci. 2020, 10, 3633. [Google Scholar] [CrossRef]
- Hamad, M.; Nertinger, S.; Kirschner, R.J.; Figueredo, L.; Naceri, A.; Haddadin, S. A Concise Overview of Safety Aspects in human–robot Interaction. arXiv 2023, arXiv:2309.09936. [Google Scholar]
- Valori, M.; Scibilia, A.; Fassi, I.; Saenz, J.; Behrens, R.; Herbster, S.; Bidard, C.; Lucet, E.; Magisson, A.; Schaake, L.; et al. Validating Safety in Human–Robot Collaboration: Standards and New Perspectives. Robotics 2021, 10, 65. [Google Scholar] [CrossRef]
- Robla-Gómez, S.; Becerra, V.M.; Llata, J.R.; González-Sarabia, E.; Torre-Ferrero, C.; Pérez-Oria, J. Working Together: A Review on Safe human–robot Collaboration in Industrial Environments. IEEE Access 2017, 5, 26754–26773. [Google Scholar] [CrossRef]
- Gualtieri, L.; Rauch, E.; Vidoni, R. Development and validation of guidelines for safety in human–robot collaborative assembly systems. Comput. Ind. Eng. 2022, 163, 107801. [Google Scholar] [CrossRef]
- Lacevic, B.; Zanchettin, A.M.; Rocco, P. Safe human–robot Collaboration via Collision Checking and Explicit Representation of Danger Zones. IEEE Trans. Autom. Sci. Eng. 2023, 20, 846–861. [Google Scholar] [CrossRef]
- Lepuschitz, W.; Zoitl, A.; Vallée, M.; Merdan, M. Toward Self-Reconfiguration of Manufacturing Systems Using Automation Agents. IEEE Trans. Syst. Man Cybern. Part (Appl. Rev.) 2011, 41, 52–69. [Google Scholar] [CrossRef]
- Merdan, M.; Hoebert, T.; List, E.; Lepuschitz, W. Knowledge-based cyber-physical systems for assembly automation. Prod. Manuf. Res. 2019, 7, 223–254. [Google Scholar] [CrossRef]
- Hoebert, T.; Lepuschitz, W.; Vincze, M.; Merdan, M. Knowledge-driven framework for industrial robotic systems. J. Intell. Manuf. 2021, 34, 771–788. [Google Scholar] [CrossRef]
- Sampath Kumar, V.R.; Khamis, A.; Fiorini, S.; Carbonera, J.L.; Olivares Alarcos, A.; Habib, M.; Goncalves, P.; Li, H.; Olszewska, J.I. Ontologies for Industry 4.0. Knowl. Eng. Rev. 2019, 34, e17. [Google Scholar] [CrossRef]
- Legat, C.; Seitz, C.; Lamparter, S.; Feldmann, S. Semantics to the Shop Floor: Towards Ontology Modularization and Reuse in the Automation Domain. Ifac Proc. Vol. 2014, 47, 3444–3449. [Google Scholar] [CrossRef]
- Yahya, M.; Breslin, J.G.; Ali, M.I. Semantic Web and Knowledge Graphs for Industry 4.0. Appl. Sci. 2021, 11. [Google Scholar] [CrossRef]
- Stenmark, M.; Malec, J. Knowledge-based instruction of manipulation tasks for industrial robotics. Robot.-Comput.-Integr. Manuf. 2015, 33, 56–67. [Google Scholar] [CrossRef]
- Antonelli, D.; Bruno, G. Ontology-Based Framework to Design a Collaborative human–robotic Workcell. In Proceedings of the Collaboration in a Data-Rich World; Camarinha-Matos, L.M., Afsarmanesh, H., Fornasiero, R., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 167–174. [Google Scholar] [CrossRef]
- Tian, Z.; Shen, C.; Chen, H.; He, T. FCOS: Fully Convolutional One-Stage Object Detection. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Republic of Kore, 27 October–2 November 2019; pp. 9626–9635. [Google Scholar]
- Hoebert, T.; Neubauer, D.; Merdan, M.; Lepuschitz, W.; Thalhammer, S.; Vincze, M. ROS-driven Disassembly Planning Framework incorporating Screw Detection. In Proceedings of the 20th International Conference on Electrical Engineering, Computing Science and Automatic Control, CCE 2023, Mexico City, Mexico, 25–27 October 2023; IEEE: Mexico City, Mexico, 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Ghallab, M.; Knoblock, C.; Wilkins, D.; Barrett, A.; Christianson, D.; Friedman, M.; Kwok, C.; Golden, K.; Penberthy, S.; Smith, D.; et al. PDDL—The Planning Domain Definition Language; Technical Report Tech Report CVC TR-98-003/DCS TR-1165; Yale Center for Computational Vision and Control: New Haven, CT, USA, 1998. [Google Scholar]
- Hoebert, T.; Lepuschitz, W.; List, E.; Merdan, M. Cloud-Based Digital Twin for Industrial Robotics. In Proceedings of the Industrial Applications of Holonic and Multi-Agent Systems; Mařík, V., Kadera, P., Rzevski, G., Zoitl, A., Anderst-Kotsis, G., Tjoa, A.M., Khalil, I., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 105–116. [Google Scholar] [CrossRef]
- Quigley, M.; Gerkey, B.; Conley, K.; Faust, J.; Foote, T.; Leibs, J.; Berger, E.; Wheeler, R.; Ng, A. ROS: An Open-Source Robot Operating System. In Proceedings of the IEEE International Conference on Robotics and Automation, Kobe, Japan, 2–17 May 2009; p. 5. [Google Scholar]
- Coleman, D.; Sucan, I.; Chitta, S.; Correll, N. Reducing the Barrier to Entry of Complex Robotic Software: A MoveIt! Case Study. J. Softw. Eng. Robot. 2014, 5, 3–16. [Google Scholar] [CrossRef]
- Amersdorfer, M.; Meurer, T. SmartDis—Semi-Automatic Disassembly of an Antenna Amplifier; Institut für Mechanische Verfahrenstechnik und Mechanik (MVM): Karlsruhe, Germany, 2024. [Google Scholar] [CrossRef]
- Aheleroff, S.; Huang, H.; Xu, X.; Zhong, R.Y. Toward sustainability and resilience with Industry 4.0 and Industry 5.0. Front. Manuf. Technol. 2022, 2, 951643. [Google Scholar] [CrossRef]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hoebert, T.; Seibel, S.; Amersdorfer, M.; Vincze, M.; Lepuschitz, W.; Merdan, M. A Framework for Enhanced Human–Robot Collaboration during Disassembly Using Digital Twin and Virtual Reality. Robotics 2024, 13, 104. https://doi.org/10.3390/robotics13070104
Hoebert T, Seibel S, Amersdorfer M, Vincze M, Lepuschitz W, Merdan M. A Framework for Enhanced Human–Robot Collaboration during Disassembly Using Digital Twin and Virtual Reality. Robotics. 2024; 13(7):104. https://doi.org/10.3390/robotics13070104
Chicago/Turabian StyleHoebert, Timon, Stephan Seibel, Manuel Amersdorfer, Markus Vincze, Wilfried Lepuschitz, and Munir Merdan. 2024. "A Framework for Enhanced Human–Robot Collaboration during Disassembly Using Digital Twin and Virtual Reality" Robotics 13, no. 7: 104. https://doi.org/10.3390/robotics13070104
APA StyleHoebert, T., Seibel, S., Amersdorfer, M., Vincze, M., Lepuschitz, W., & Merdan, M. (2024). A Framework for Enhanced Human–Robot Collaboration during Disassembly Using Digital Twin and Virtual Reality. Robotics, 13(7), 104. https://doi.org/10.3390/robotics13070104