4.3. Performance Indexes
The indexes considered to assess the performance of the controllers correspond to an RMS, RSD, and IA, which are mathematically expressed Equations (12)–(14), respectively [
32].
where
n corresponds to the total number of observations,
denotes the observed values, and
indicates the predicted values. Additionally,
, and
, where
is the mean value of the observations.
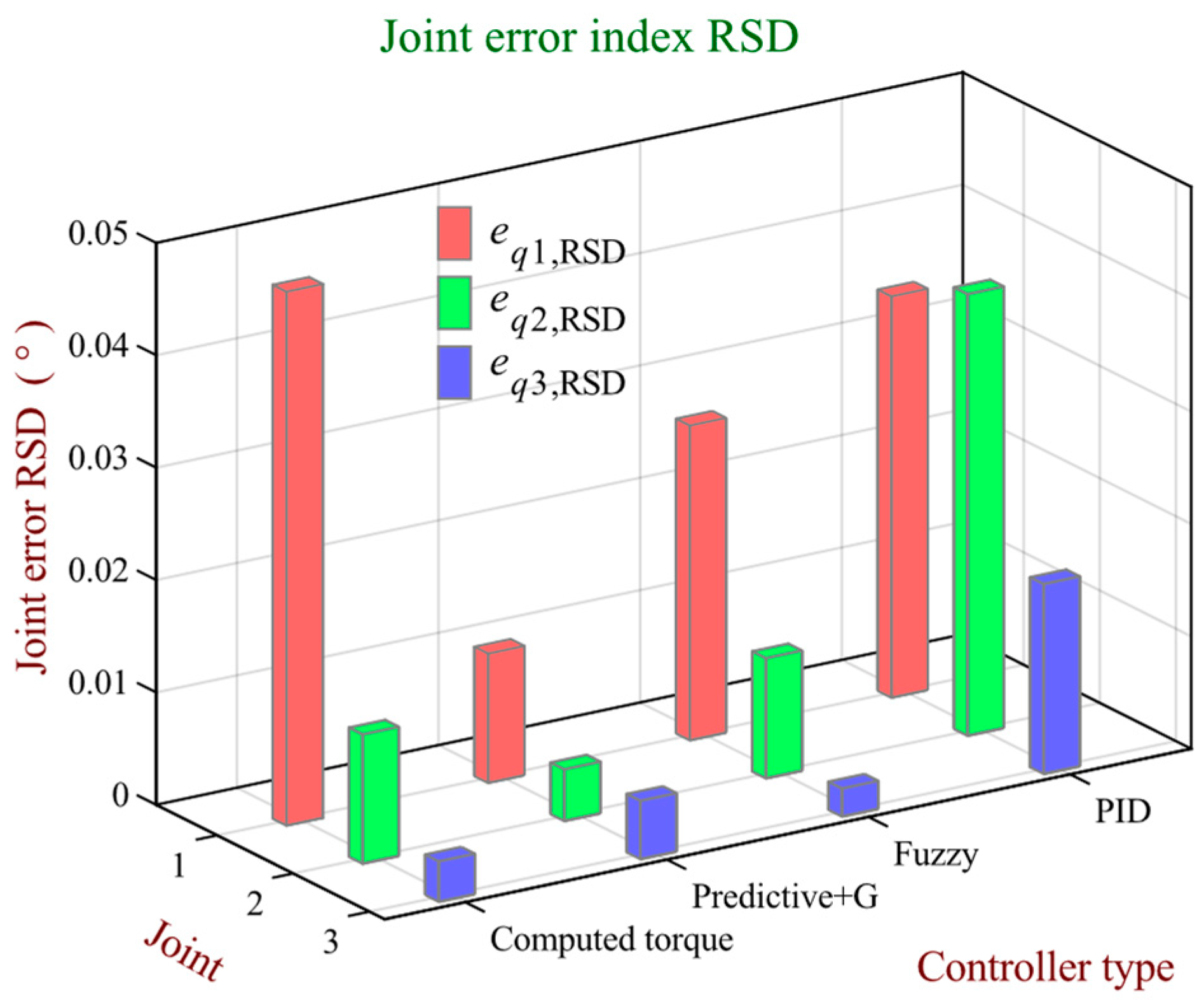
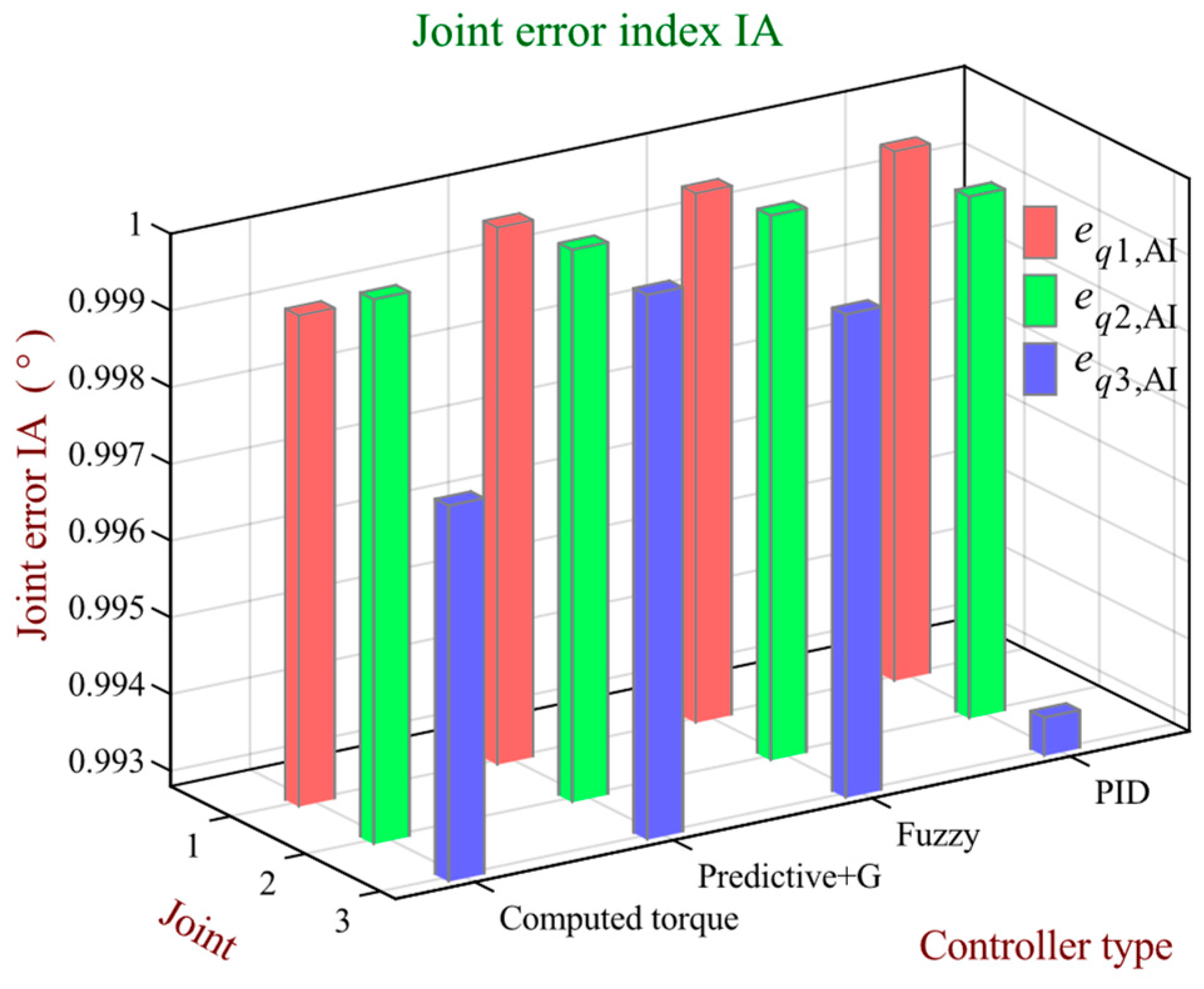
The performance metrics quantified for each control scheme include RMS, RSD, and IA, graphed per joint in
Figure 18,
Figure 19 and
Figure 20 across the single, dual, and triple joint configurations incorporating the base, shoulder, and elbow (1, 2, and 3).
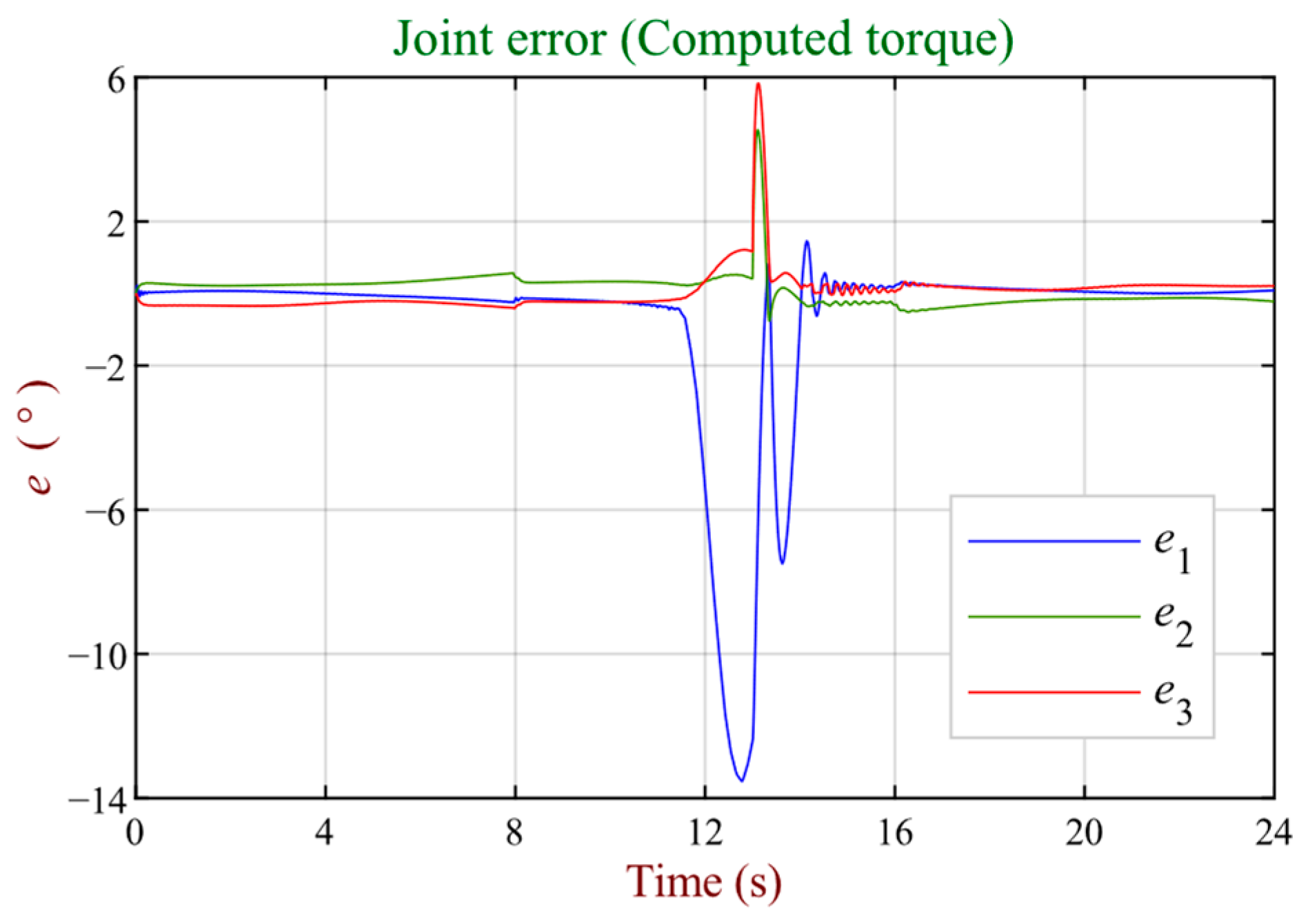
According to the results obtained, it is observed that, although the test disturbance was applied only to joint 3, the greatest errors occur in joint 1 in terms of regulation, which corresponds to the rotational base of the robot. This rotational base is not affected by gravitational effects, and therefore such results seem contradictory. However, approximately at 10–14 s of the trajectory, the largest slope is detected at joint 1. This means that the effects of the test disturbance are added to the torque limitations of the joint 1 actuator, according to the requirement of excessive speed in the indicated section.
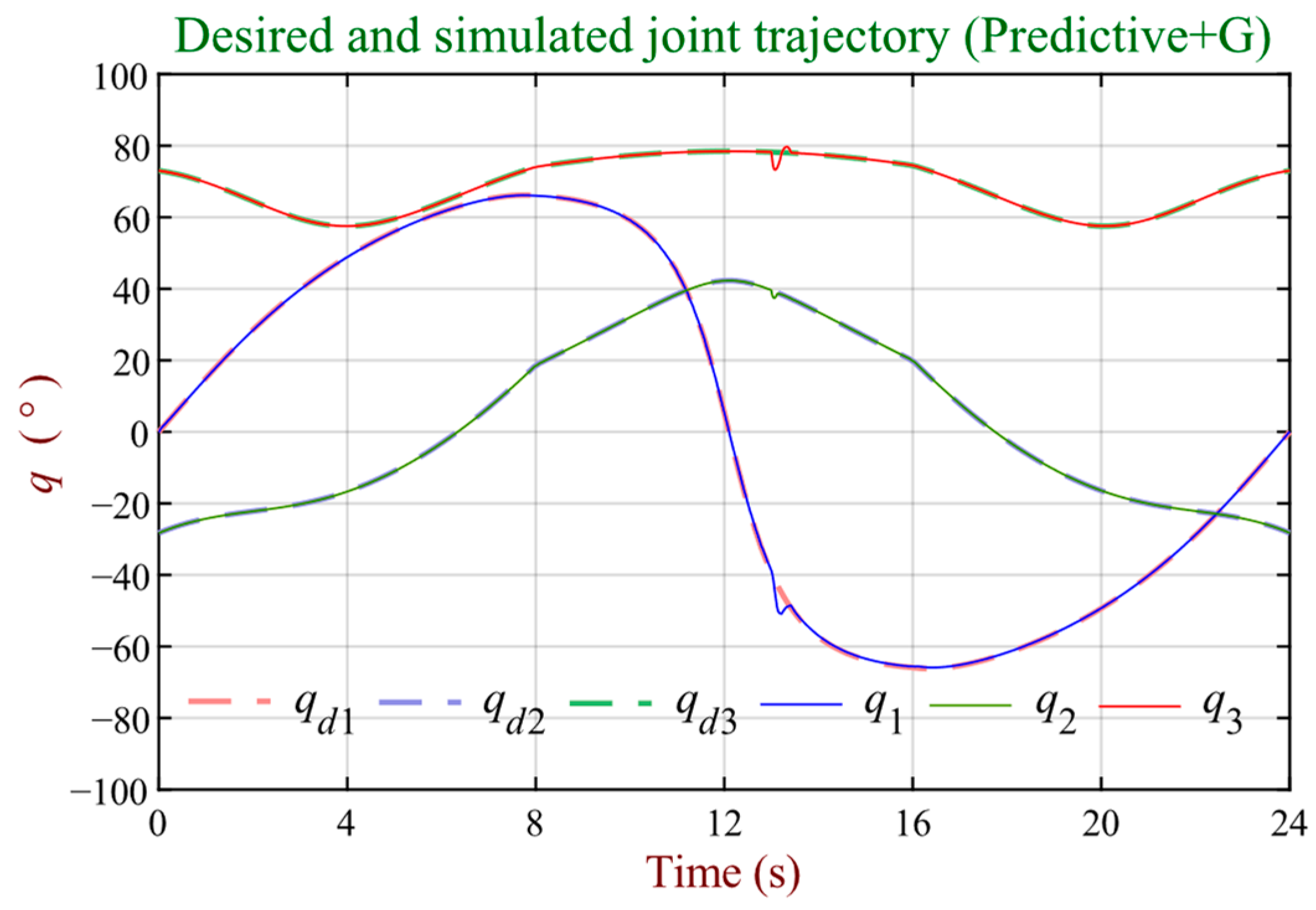
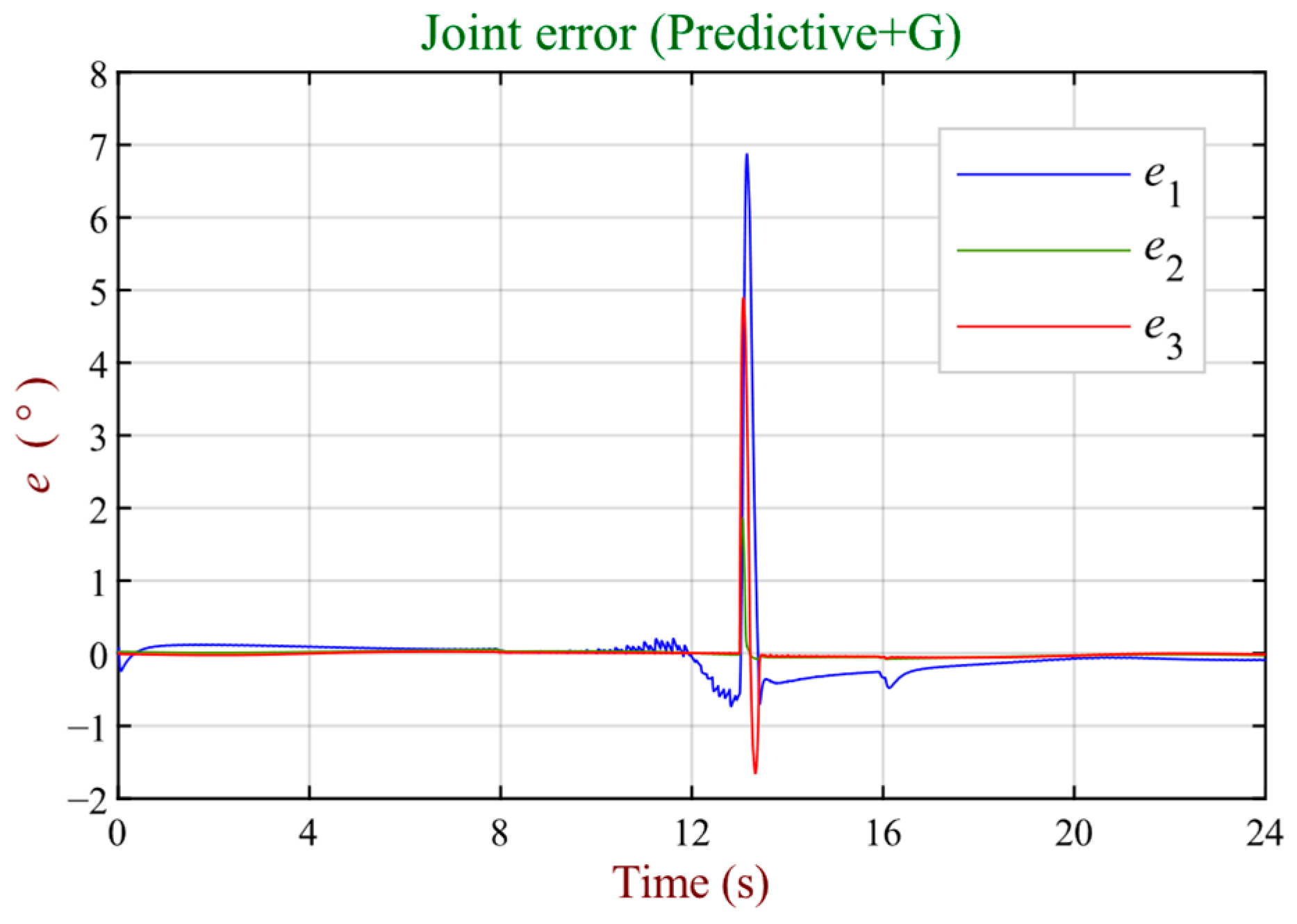
However, in the predictive controller, more gravity compensation presents the least joint peak deviation, as indicated in
Figure 11 and
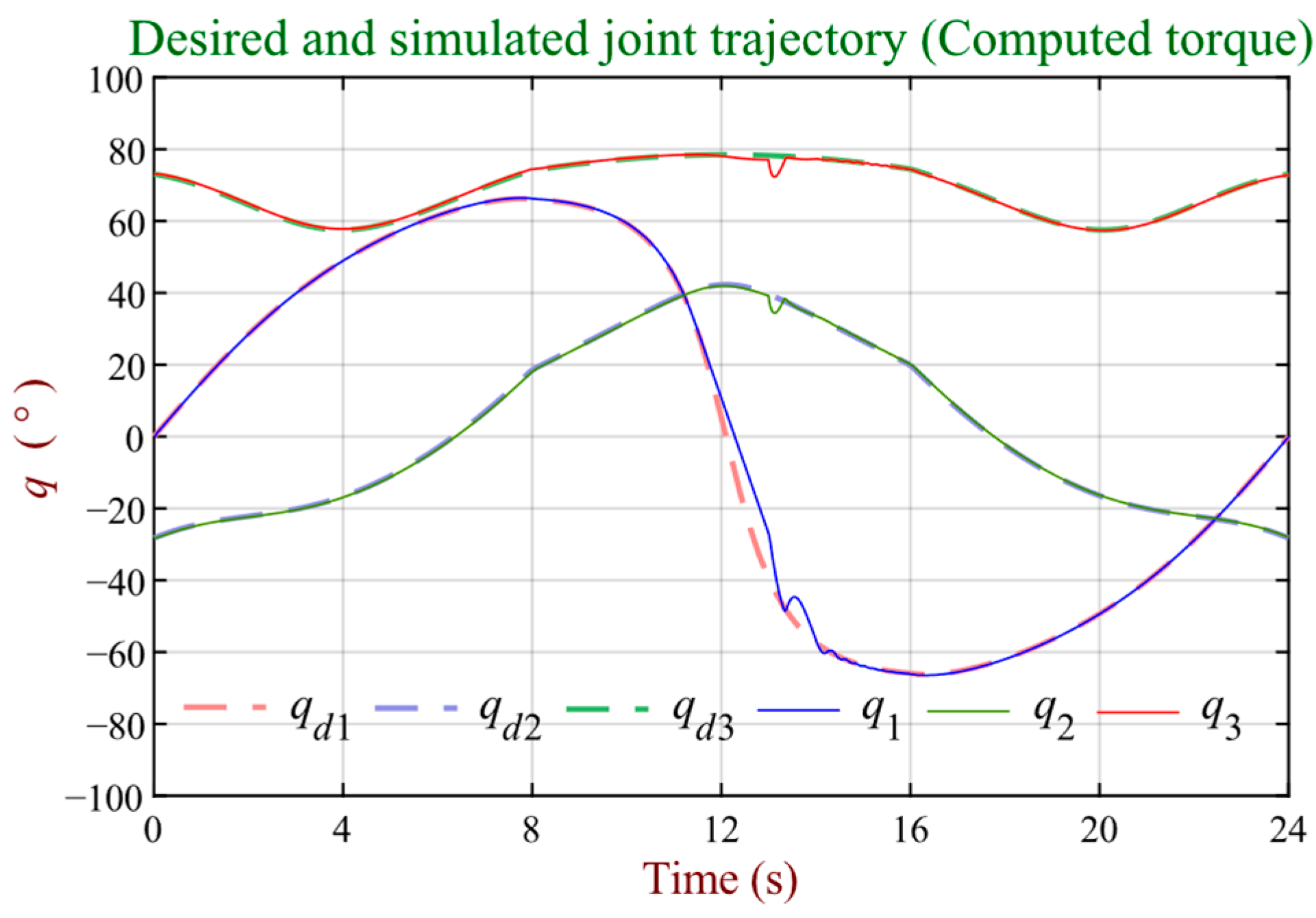
Figure 15. In this context, the calculated torque controller shows considerable difficulty in facing the demands of speed and torque limitations, in addition to the test disturbance, as shown in
Figure 10.
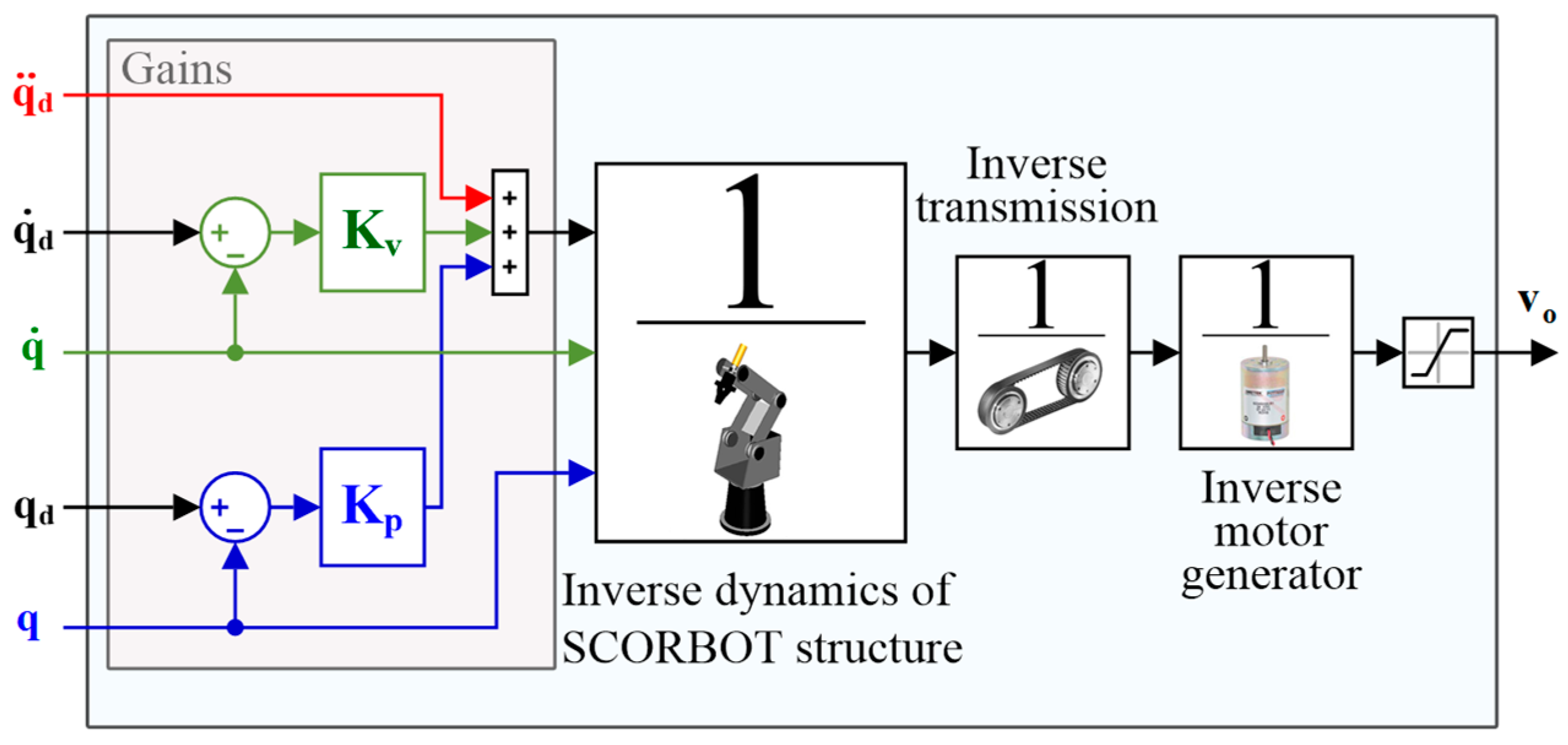
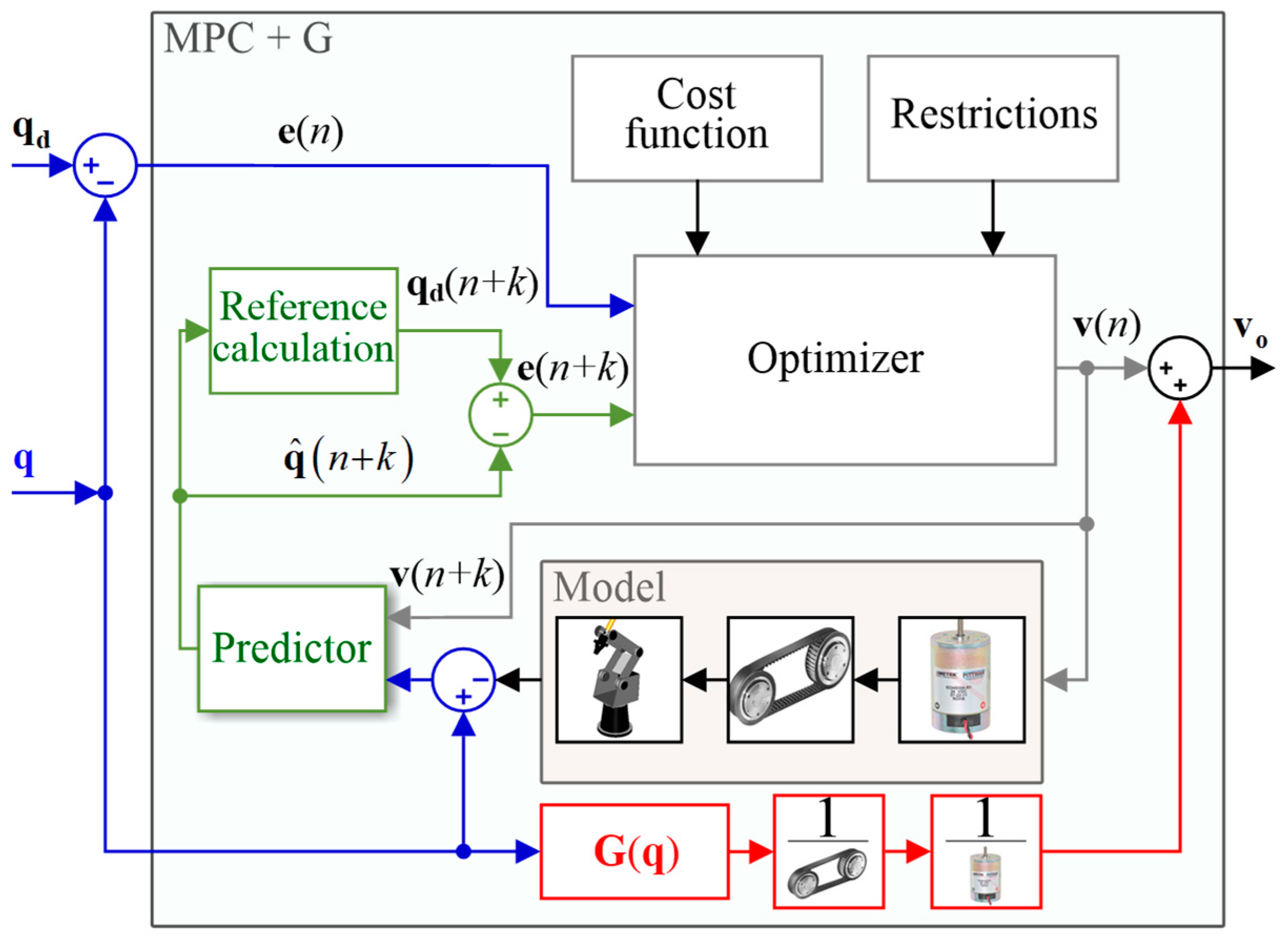
It should be noted that, in the first design stage, the predictive controller without gravity compensation was considered. However, its performance to compensate for the effects of the test disturbance was not satisfactory, particularly for joints 2 and 3. Thus, it was decided to incorporate a gravitational compensation section based directly on Equations (24) and (25). The result was again not satisfactory, as the fact that this compensation was applied directly as a voltage supply signal to the actuators resulted in it being very aggressive. Therefore, it was decided to reduce gravitational compensation through the inverse models of the belt motion transmissions and the PITTMAN motors, as shown in
Figure 4. In the latter case, the models were obtained through the training of artificial neural networks by an inverse model. However, an important limitation regarding the predictive controller with gravity compensation, unlike the other controllers analyzed, refers to the fact that it presented a higher computational cost in terms of the execution times of the simulations. This disadvantage can be explained by the iteration requirements to solve an optimization problem [
13]. Such a characteristic can be decisive when making a real practical implementation without having high-performance processors.
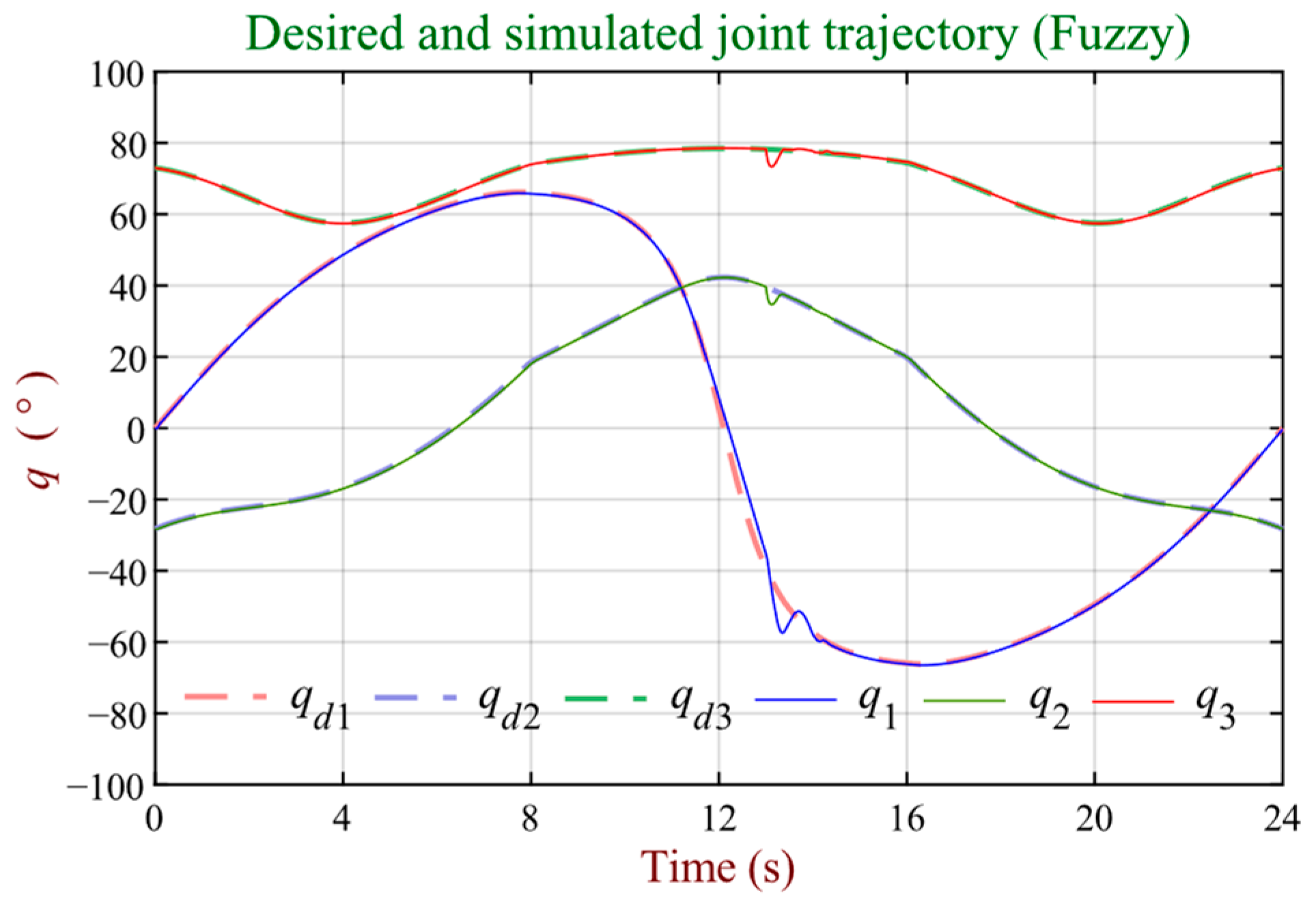
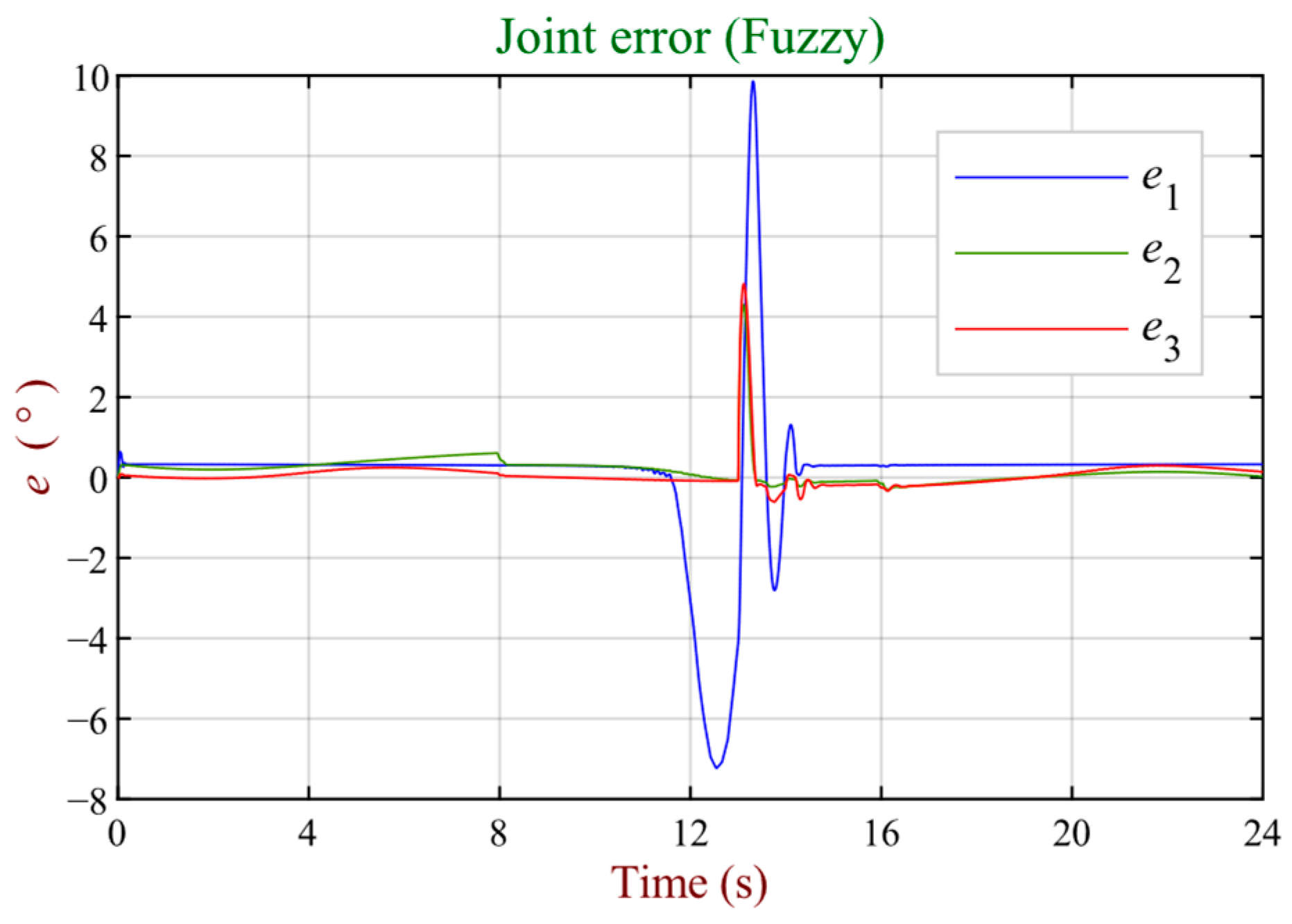
In terms of tracking (before the application of the test disturbance), the resulting joint trajectories that more closely approximate the desired joint trajectory correspond to those provided by the predictive with gravity compensation and diffuse controllers, as seen in
Figure 11 and
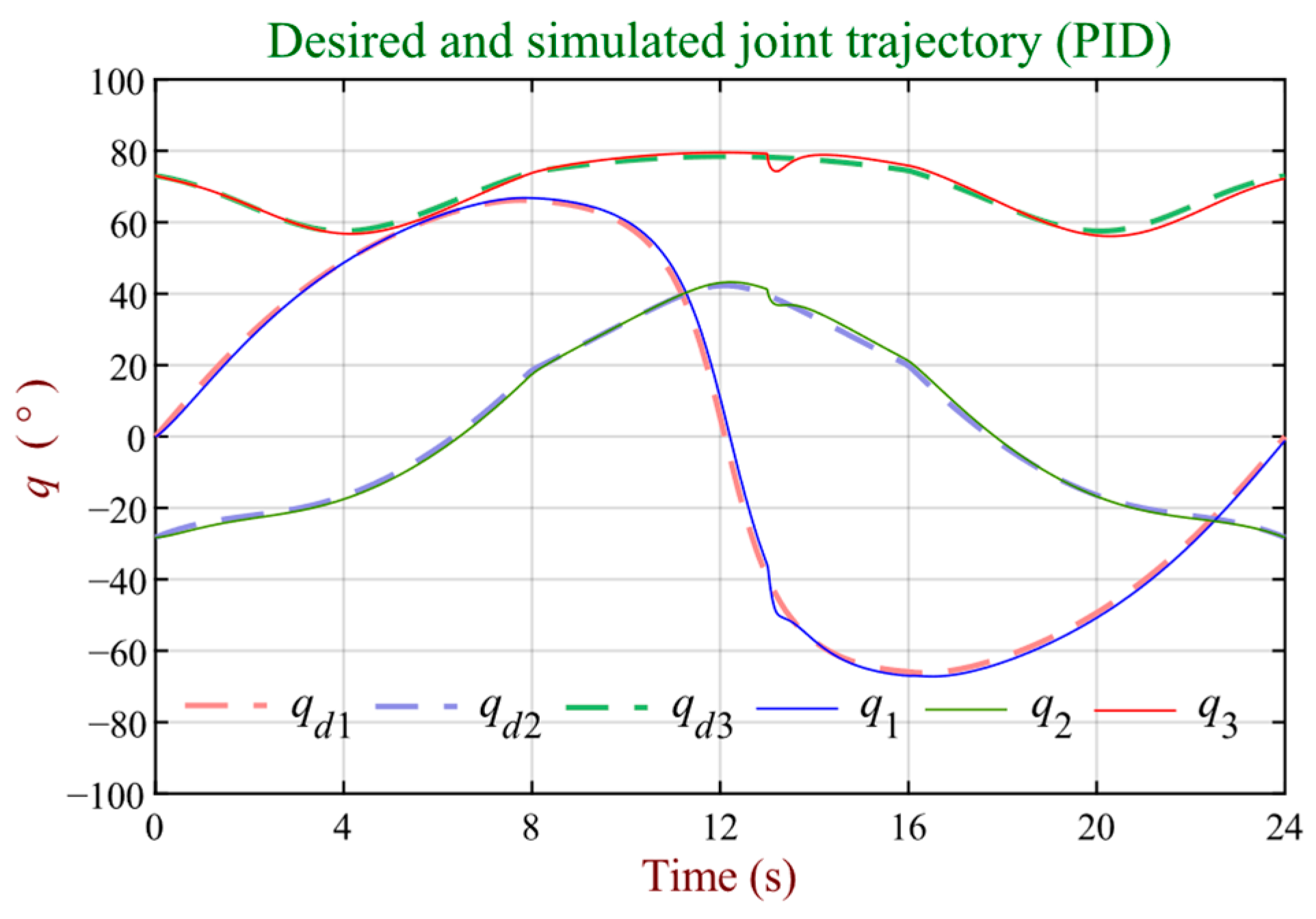
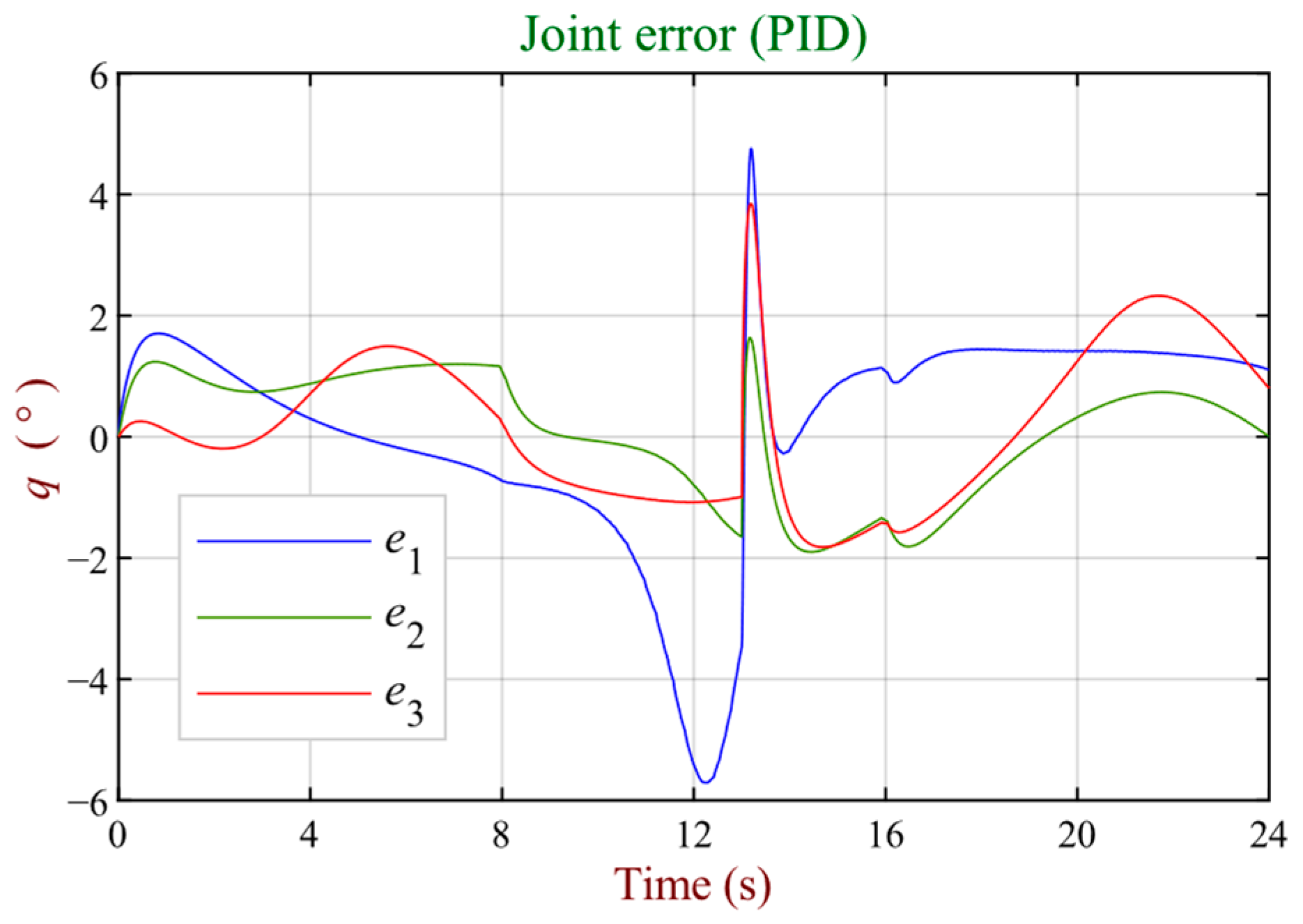
Figure 12, respectively. Regarding the performance of the PID controllers and calculated torque, the latter presents higher tracking accuracy than PID and notably lower joint errors, as shown in
Figure 14 and
Figure 17. This result relates to the precise knowledge of the dynamic parameters that characterize the robot [
5]. However, since these results are obtained through computational simulations, similar results cannot be ensured in a real practical implementation.
When analyzing joint 1, the predictive controller with gravity compensation yielded the smallest RMS and RDS errors, as well as an IA value closest to 1. These values were 0.0010, 0.0115, and 0.9998, respectively. In turn, for the same joint, the computed torque controller presents the highest RMS and RDS errors, as well as the IA value farthest from 1. Such values are 0.0402, 0.0475, and 0.9992, respectively.
Regarding joint 2, the predictive controller with gravity compensation exhibits an excellent performance, characterized by an RMS error equal to 0.0019, an RDS value of 0.0046, and an IA index of 1.0000. Conversely, it must be noted that the highest RMS and RDS errors, together with the IA value farthest from 1, correspond to the PID controller, whose respective values for the three indexes are 0.0168, 0.0393, and 0.9996.
According to the tracking and regulation results of joint 3, the fuzzy controller exhibits the lowest RMS (0.0031) and RSD (0.0025) errors. However, the IA value closest to 1 is presented by the predictive controller with gravity compensation, which has a 0.9999 value. In this context, the PID controller shows the lowest performance, with values for the RMS, RSD, and IA indexes being equal to 0.0204, 0.0169, and 0.9933, respectively.
Table 6 aggregates the RMS, RSD, and IA metrics quantified per controller for the single, dual, and three joint configurations encompassing the base, shoulder, and elbow manipulator links.
Optimally, RMS and RSD values approach 0, indicating negligible tracking errors, while the IA nears 1, conveying a high correlation between the reference and measured joint trajectories.
In general terms, according to the calculated performance indices, the performances of the Fuzzy, Predictive + G, and Computed Torque controllers are similar. However, when analyzing the performance in terms of the disturbance rejection, it is possible to highlight that the Predictive + G controller takes considerably less time (than the other controllers) to compensate for the disturbance projected on the base and shoulder of the robot, with times of 0.45 and 0.14 s, respectively. On the other hand, the disturbance compensation time at the robot’s elbow is approximately similar for the three aforementioned controllers. This can be explained by the fact that the disturbance was applied directly to the robot’s elbow, and the correction speed is conditioned by the torque limitations of the PITTMAN actuators. The presented results were obtained through the use of various tests, including making modifications to the parameters of each controller until the best possible result for each of them was obtained. In this way, it is possible to affirm that the performance of the controllers must depend on the tuning parameters.
Table 7 shows the disturbance compensation times.


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}