

What Affects Human Decision Making in Human–Robot Collaboration?: A Scoping Review

 , , and
, , and
Abstract
1. Introduction
1.1. Human Decision Making
1.2. Cognitive Workload and Human Decision Making
2. Methods
3. Results
3.1. Study Characteristics
3.2. Study Design and Setting
3.2.1. Study Settings
3.2.2. Measures
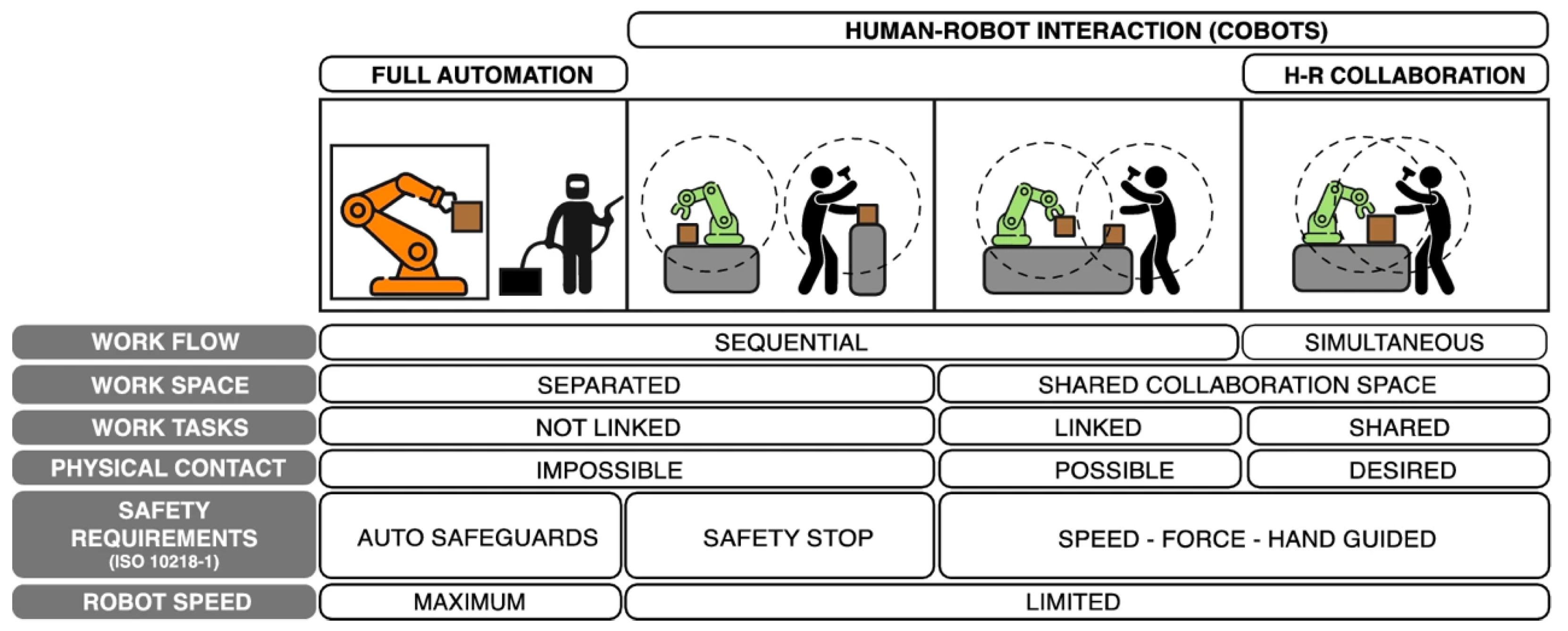
3.3. Human–Robot Interaction
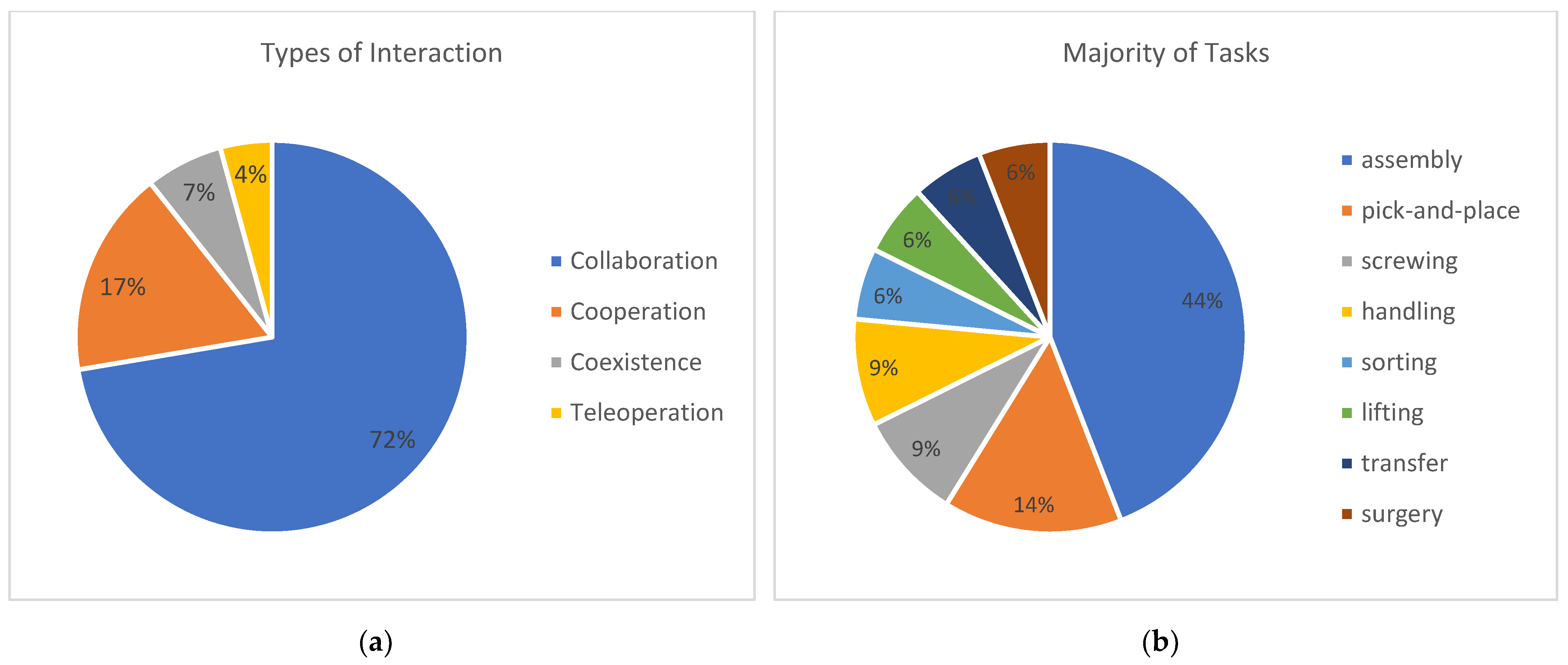
3.3.1. Types of Interaction and Tasks
3.3.2. Types of Cobots
3.4. Factors Related to Human Decision Making
3.4.1. Human Factors
3.4.2. Robot Factors
3.4.3. Communication Factors
3.4.4. Environmental Factors
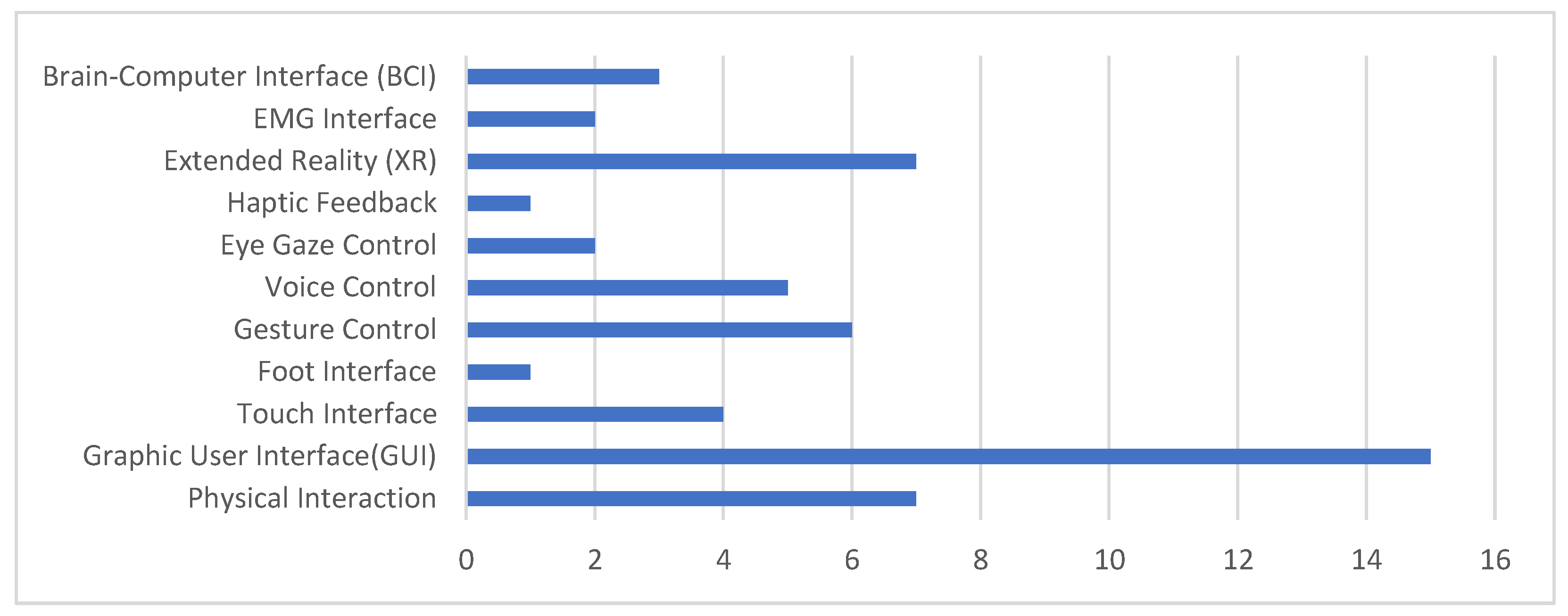
3.5. User Interface
3.6. Technologies Related to Human Decision Making
4. Discussion
4.1. Key Findings
4.2. Potential Solutions
4.3. Limitations
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Year | Type | Title | Country | Aims |
|---|---|---|---|---|---|
| [37] | 2018 | Journal Article | Progress and prospects of the human–robot collaboration | Italy | Review the current state-of-the-art in HRC, focusing on intermediate human–robot interfaces, robot control modalities, system stability, benchmarking, and relevant use cases. |
| [48] | 2018 | Journal Article | Collaborative assembly in hybrid manufacturing cells: An integrated framework for human–robot interaction | USA | Develop an integrated framework for effective human–robot interaction (HRI). |
| [38] | 2018 | Journal Article | Survey on human–robot collaboration in industrial settings: Safety, intuitive interfaces and applications | Italy | Explore collaborative robotics solutions where human workers and robots share skills, focusing on combining the advantages of robots (accuracy, speed, repeatability) with the flexibility and cognitive skills of human workers. |
| [63] | 2019 | Conference Paper | A human-in-the-loop cyber-physical system for collaborative assembly in smart manufacturing | Italy | Present a natural human–machine interface (NHMI) that integrates human decision making capabilities into the cybernetic control loop of a smart manufacturing assembly system. |
| [39] | 2019 | Journal Article | Symbiotic human–robot collaborative assembly | Sweden | Provides an overview of symbiotic human–robot collaborative assembly and highlights future research directions. |
| [64] | 2019 | Conference Paper | Human Prediction for the Natural Instruction of Handovers in Human Robot Collaboration | Germany | Presents an approach to integrate robotic handover assistance into collaborative assembly tasks using natural communication. |
| [49] | 2019 | Conference Paper | Human Features-Based Variable Admittance Control for Improving HRI and Performance in Power-Assisted Heavy Object Manipulation | USA | Address the limitations of current power assist robotic system (PARS) for lifting objects and to propose a variable admittance control (VAC) based on weight perception and kinematic and kinetic features to improve HRI and performance. |
| [36] | 2019 | Conference Paper | An effective model for human cognitive performance within a human–robot collaboration framework | USA | Proposes a novel time-variant human cognitive performance modelling approach for human–robot collaborative actions. |
| [66] | 2019 | Journal Article | Objective Assessment of Human Workload in Physical Human–robot Cooperation Using Brain Monitoring | USA | Assess human workload in physical human–robot cooperation, improving the reliability and generalizability of workload classifiers by selecting EEG features common between different tasks. |
| [67] | 2020 | Conference Paper | Human decisions for robot integration task allocation in a plan based building assignment | Germany | Explore how inexperienced individuals adapt to using a cooperative robot. |
| [40] | 2020 | Journal Article | Passive Brain–Computer Interfaces for Enhanced Human–robot Interaction | Netherlands | Review the state of the art in passive Brain–Computer Interface (BCI) technology in human–robot interaction (HRI). |
| [41] | 2020 | Conference Paper | Human–robot Collaboration Systems: Components and Applications | Mexico | Present a literature review analysis identifying trends in Human–robot Collaboration (HRC) in the manufacturing sector. |
| [68] | 2020 | Conference Paper | Examining the Effects of Anticipatory Robot Assistance on Human Decision Making | USA | Investigates whether a robot’s anticipatory assistance influences a person’s decision making during a task. It aims to measure intent and examine if anticipatory robot actions affect user decisions. |
| [69] | 2020 | Journal Article | Multimodal Physiological Signals for Workload Prediction in Robot-assisted Surgery | USA | Demonstrate a computational framework to predict user workload during telerobotic surgery using wireless sensors to monitor surgeons’ cognitive load and predict their cognitive states. |
| [42] | 2020 | Journal Article | Collaborative Robotics: A Survey | Italy | Provide an overview of collaborative robotics, emphasizing the close interaction between humans and robots in industrial settings. |
| [70] | 2021 | Journal Article | Contact-initiated shared control strategies for four-arm supernumerary manipulation with foot interfaces | Switzerland | Explore the effectiveness of contact-initiated shared control strategies to improve the subjective fluency of human–robot interaction and reduce the task load on participants. |
| [50] | 2021 | Conference Paper | A Cognitive Human Model for Virtual Commissioning of Dynamic Human–robot Teams | Germany | Develop a generic and configurable cognitive human model for virtual commissioning. |
| [46] | 2021 | Conference Paper | Connecting human–robot interaction and data visualization | USA | Highlight the importance of integrating data visualization knowledge into robot interface design to enhance data analysis and decision making in human–robot interaction (HRI). |
| [51] | 2021 | Journal Article | Methods for Expressing Robot Intent for Human–Robot Collaboration in Shared Workspaces | USA | Improve interaction experiences between humans and robots working in close proximity, such as in factory settings. It reports on a user study that tested various signals a robot might use to communicate its intent to move, thereby enhancing safety and efficiency. |
| [52] | 2021 | Conference Paper | Dynamic Path Visualization for Human–robot Collaboration | USA | Develop a method that conveys a robot’s future navigation route in a quick and intuitive manner using augmented reality in simulation. |
| [71] | 2021 | Journal Article | Facing with Collaborative Robots:The Subjective Experience in Senior and Younger Workers | Italy | Understand the subjective experience of younger and senior workers interacting with an industrial collaborative robot (cobot). |
| [47] | 2021 | Journal Article | Autonomy in Physical Human–robot Interaction: A Brief Survey | Italy | Collect and discuss the latest results in the field of shared control (SC) and shared autonomy (SA), with a particular focus on Physical Human–robot Interaction (pHRI). |
| [53] | 2021 | Journal Article | Human–robot collaboration: Optimizing stress and productivity based on game theory | Italy | Propose a novel paradigm that enables a robot to adapt its behaviour online to optimize human physiological stress and productivity in real-time. |
| [43] | 2021 | Journal Article | Ergonomics and human factors as a requirement to implement safer collaborative robotic workstations: A literature review | Portugal | Conduct a literature review to understand the integration of ergonomics and human factors (E&HF) as a requirement in the implementation of collaborative robots (Cobots) to reduce work-related Musculoskeletal Disorders (WMSD) risk. |
| [72] | 2022 | Conference Paper | Human–robot Collaboration During Assembly Tasks: The Cognitive Effects of Collaborative Assembly Workstation Features | Italy | Explore the effects of collaborative robotic system features on workers’ perceived cognitive workload, usability, and visual attention. |
| [73] | 2022 | Conference Paper | Evaluation of Variables of Cognitive Ergonomics in Industrial Human–robot Collaborative Assembly Systems | Italy | Evaluate cognitive ergonomics variables in human–robot collaborative assembly systems (CASs) within the context of Industry 4.0. |
| [54] | 2022 | Journal Article | Pick the Right Co-Worker: Online Assessment of Cognitive Ergonomics in Human–robot Collaborative Assembly | Italy | Propose an online and quantitative method to assess the cognitive workload induced by interaction with a co-worker, which can be either a human operator or an industrial collaborative robot with different control strategies. |
| [55] | 2022 | Conference Paper | Robot Trajectory Adaptation to Optimise the Trade-off between Human Cognitive Ergonomics and Workplace Productivity in Collaborative Tasks | Italy | Propose a human–robot interaction framework that adapts the robot’s behaviour online according to the operator’s cognitive workload and stress to address the balance between worker comfort and safety and the productivity of collaborative robots (CoBots) in industrial settings. |
| [56] | 2022 | Journal Article | Cross-Task Cognitive Workload Recognition Based on EEG and Domain Adaptation | China | Proposes a new framework for EEG-based cross-task cognitive workload recognition using domain adaptation methods. |
| [44] | 2022 | Journal Article | Metrics for Robot Proficiency Self-assessment and Communication of Proficiency in Human–robot Teams | USA | Develop metrics to evaluate the characteristics and performance of robot systems that can self-assess their proficiency in accomplishing tasks. |
| [74] | 2022 | Journal Article | Neurophysiological and Behavioral Differences in Human-Multiagent Tasks: An EEG Network Perspective | USA | Understand the cognitive state of humans as they interact with multiagent systems and to use this understanding to improve collaboration between humans and robots. |
| [75] | 2022 | Conference Paper | Towards Brain Metrics for Improving Multi-Agent Adaptive Human–robot Collaboration: A Preliminary Study | USA | Investigate brain metrics of workload and collaboration in teams consisting of humans and robots, focusing on two brain regions: the right prefrontal cortex (rPFC) and the right superior temporal sulcus (rSTS) during collaborative tasks. |
| [45] | 2022 | Journal Article | Human Factors Considerations and Metrics in Shared Space Human–robot Collaboration: A Systematic Review | USA | Systematically review the literature to evaluate the most frequently addressed operator human factor states in shared space human–robot collaboration (HRC), the methods used to quantify these states, and the implications of these states on HRC. |
| [17] | 2022 | Journal Article | What about the human in human robot collaboration?: A literature review on HRC’s effects on aspects of job quality | Netherlands | Review the effects of human–robot collaboration (HRC) on job quality, defined as the quality of the working environment and its impact on employee well-being. |
| [57] | 2022 | Journal Article | Development and evaluation of design guidelines for cognitive ergonomics in human–robot collaborative assembly systems | Italy | Develop and evaluate design guidelines for cognitive ergonomics in human–robot collaborative assembly systems (CASs). |
| [76] | 2023 | Book Chapter | Enhancing the Quality of Human–robot Cooperation Through the Optimization of Human Well-Being and Productivity | Italy | Enhance the quality of human–robot cooperation (HRC) by optimizing human well-being and productivity. |
| [77] | 2023 | Journal Article | Assessing the Relationship between Cognitive Workload, Workstation Design, User Acceptance and Trust in Collaborative Robots | Italy | Assesses the relationship between cognitive workload, workstation design, user acceptance, and trust in collaborative robots. |
| [58] | 2023 | Journal Article | UHTP: A User-Aware Hierarchical Task Planning Framework for Communication-Free, Mutually Adaptive Human–robot Collaboration | USA | Develop a User-aware Hierarchical Task Planning (UHTP) framework for communication-free, mutually adaptive human–robot collaboration. |
| [78] | 2023 | Conference Paper | Pupillometry for Measuring User Response to Movement of an Industrial Robot | Switzerland | Measure users’ cognitive workload (CWL) responses to robot movements using pupillometry. |
| [79] | 2023 | Conference Paper | Multisensory Evaluation of Human–robot Interaction in Retail Stores-The Effect of Mobile Cobots on Individuals’ Physical and Neurophysiological Responses | USA | Assess individuals’ physical and neurophysiological responses to a mobile cobot in a retail environment, with a focus on understanding how these interactions affect short-term adaptation and to inform the cobot’s behavioural and control algorithms. |
| [59] | 2023 | Conference Paper | Enhancing Human–robot Collaboration by Exploring Intuitive Augmented Reality Design Representations | USA | Develop systematic design guidelines for AR interfaces in Human–robot Interaction (HRI) systems and evaluating these designs to improve user understanding of the robot’s intents, trust, and safety in the work environment. |
| [60] | 2023 | Conference Paper | A Multimodal Approach to Investigate the Role of Cognitive Workload and User Interfaces in Human–robot Collaboration | USA | Refine interactions between humans, machines, and robots by developing human-centered design solutions to enhance HRC performance, trust, and safety. |
| [65] | 2023 | Journal Article | Comparing alternative modalities in the context of multimodal human–robot interaction | India | Evaluate the impact of alternative input modalities on user performance and perceived cognitive workload in human–robot interaction, using a fixed-base robot for object picking and dropping in single-task scenarios, and a mobile robot for driving in dual-task scenarios. |
| [61] | 2023 | Conference Paper | Towards the modelling of defect generation in human–robot collaborative assembly | Italy | Develop suitable defect generation models for predicting defects in manufacturing processes and planning effective quality controls, specifically in a human–robot collaborative environment, to compare quality performances with purely manual assembly. |
| [80] | 2023 | Journal Article | The effect of cognitive workload on decision authority assignment in human–robot collaboration | Switzerland | Investigate the effect of decision authority schemes in HRC tasks on performance, overall perceived workload, and subjective preference criteria at different levels of induced cognitive workload. |
| [62] | 2023 | Journal Article | A Haptic Shared Control Architecture for Tracking of a Moving Object | China | Propose a haptic shared control framework that integrates human and robotic control to track moving objects. |
References
- Baratta, A.; Cimino, A.; Gnoni, M.G.; Longo, F. Human Robot Collaboration in Industry 4.0: A Literature Review. Procedia Comput. Sci. 2023, 217, 1887–1895. [Google Scholar] [CrossRef] [PubMed]
- Demir, K.A.; Halil, C. The next Industrial Revolution: Industry 5.0 and Discussions on Industry 4.0, Industry 4.0 from the Management Information Systems Perspectives. In Industry 4.0 from the MIS Perspective; Peter Lang GmbH: Frankfurt, Germany, 2018. [Google Scholar]
- Raja Santhi, A.; Muthuswamy, P. Industry 5.0 or Industry 4.0S? Introduction to Industry 4.0 and a Peek into the Prospective Industry 5.0 Technologies. Int. J. Interact. Des. Manuf. 2023, 17, 947–979. [Google Scholar] [CrossRef]
- Gervasi, R.; Mastrogiacomo, L.; Franceschini, F. A Conceptual Framework to Evaluate Human-Robot Collaboration. Int. J. Adv. Manuf. Technol. 2020, 108, 841–865. [Google Scholar] [CrossRef]
- Colgate, J.E.; Wannasuphoprasit, W.; Peshkin, M.A. Cobots: Robots for Collaboration with Human Operators; Kwon, Y.W., Davis, D., Chung, H.H., Eds.; ASME: New York, NY, USA, 1996; Volume 58. [Google Scholar]
- Akella, P.; Peshkin, M.; Colgate, E.; Wannasuphoprasit, W.; Nagesh, N.; Wells, J.; Holland, S.; Pearson, T.; Peacock, B. Cobots for the Automobile Assembly Line. In Proceedings of the 1999 IEEE International Conference on Robotics and Automation (Cat. No.99CH36288C), Detroit, MI, USA, 10–15 May 1999; Volume 1, pp. 728–733. [Google Scholar]
- Guertler, M.; Tomidei, L.; Sick, N.; Carmichael, M.; Paul, G.; Wambsganss, A.; Moreno, V.H.; Hussain, S. When Is a Robot a Cobot? Moving beyond Manufacturing and Arm-Based Cobot Manipulators. Proc. Des. Soc. 2023, 3, 3889–3898. [Google Scholar] [CrossRef]
- Kopp, T.; Baumgartner, M.; Kinkel, S. Success Factors for Introducing Industrial Human-Robot Interaction in Practice: An Empirically Driven Framework. Int. J. Adv. Manuf. Technol. 2021, 112, 685–704. [Google Scholar] [CrossRef]
- Burden, A.G.; Caldwell, G.A.; Guertler, M.R. Towards Human–Robot Collaboration in Construction: Current Cobot Trends and Forecasts. Constr. Robot. 2022, 6, 209–220. [Google Scholar] [CrossRef]
- ISO 10218-1:2011. Available online: https://www.iso.org/standard/51330.html (accessed on 29 December 2023).
- Puterman, M.L. Chapter 8 Markov Decision Processes. In Handbooks in Operations Research and Management Science; Elsevier: Amsterdam, The Netherlands, 1990; Volume 2, pp. 331–434. [Google Scholar]
- Kaelbling, L.P.; Littman, M.L.; Cassandra, A.R. Planning and Acting in Partially Observable Stochastic Domains. Artif. Intell. 1998, 101, 99–134. [Google Scholar] [CrossRef]
- Ma, W.J. Bayesian Decision Models: A Primer. Neuron 2019, 104, 164–175. [Google Scholar] [CrossRef]
- Can Görür, O.; Rosman, B.; Sivrikaya, F.; Albayrak, S. FABRIC: A Framework for the Design and Evaluation of Collaborative Robots with Extended Human Adaptation. ACM Trans. Hum.-Robot. Interact. 2023, 12, 38. [Google Scholar] [CrossRef]
- Soori, M.; Arezoo, B.; Dastres, R. Artificial Intelligence, Machine Learning and Deep Learning in Advanced Robotics, a Review. Cogn. Robot. 2023, 3, 54–70. [Google Scholar] [CrossRef]
- Jonassen, D.H. Designing for Decision Making. Educ. Technol. Res. Dev. 2012, 60, 341–359. [Google Scholar] [CrossRef]
- Baltrusch, S.J.; Krause, F.; de Vries, A.W.; van Dijk, W.; de Looze, M.P. What about the Human in Human Robot Collaboration?: A Literature Review on HRC’s Effects on Aspects of Job Quality. Ergonomics 2022, 65, 719–740. [Google Scholar] [CrossRef] [PubMed]
- Randell, R.; Honey, S.; Alvarado, N.; Pearman, A.; Greenhalgh, J.; Long, A.; Gardner, P.; Gill, A.; Jayne, D.; Dowding, D. Embedding Robotic Surgery into Routine Practice and Impacts on Communication and Decision Making: A Review of the Experience of Surgical Teams. Cogn. Technol. Work 2016, 18, 423–437. [Google Scholar] [CrossRef]
- Liu, Y.; Nejat, G. Multirobot Cooperative Learning for Semiautonomous Control in Urban Search and Rescue Applications. J. Field Robot. 2016, 33, 512–536. [Google Scholar] [CrossRef]
- Klein, G.A.; Orasanu, J.; Caldenwood, R. Decision Making in Action: Models and Methods; Praeger: Westport, CT, USA, 1993; ISBN 9780893919436. [Google Scholar]
- Klein, G. Naturalistic Decision Making. Hum. Factors 2008, 50, 456–460. [Google Scholar] [CrossRef]
- Yesilbas, V.; Cotter, T.S. Application of Naturalistic Decision Making to the Domain of Unmanned Air Vehicles Operations. In Proceedings of the International Annual Conference of the American Society for Engineering Management, Philadelphia, PA, USA, 23–26 October 2019; American Society for Engineering Management (ASEM): Huntsville, AL, USA, 2019; pp. 1–7. [Google Scholar]
- Fan, X.; Sun, S.; McNeese, M.; Yen, J. Extending the Recognition-Primed Decision Model to Support Human-Agent Collaboration. In Proceedings of the Fourth International Joint Conference on Autonomous Agents and Multiagent Systems, Utrecht, The Netherlands, 25–29 July 2005; Association for Computing Machinery: New York, NY, USA; pp. 945–952. [Google Scholar]
- Gonzalez, C. Task Workload and Cognitive Abilities in Dynamic Decision Making. Hum. Factors 2005, 47, 92–101. [Google Scholar] [CrossRef] [PubMed]
- Simone, V.D.; Pasquale, V.D.; Giubileo, V.; Miranda, S. Human-Robot Collaboration: An Analysis of Worker’s Performance. Procedia Comput. Sci. 2022, 200, 1540–1549. [Google Scholar] [CrossRef]
- Ewusi-Mensaxh, K. Evaluating Information Systems Projects: A Perspective on Cost-Benefit Analysis. Inf. Syst. 1989, 14, 205–217. [Google Scholar] [CrossRef]
- Kumar, A.; Maskara, S. Coping up with the Information Overload in the Medical Profession. J. Biosci. Med. 2015, 03, 124–127. [Google Scholar] [CrossRef]
- Amadori, P.V.; Fischer, T.; Wang, R.; Demiris, Y. Predicting Secondary Task Performance: A Directly Actionable Metric for Cognitive Overload Detection. IEEE Trans. Cogn. Dev. Syst. 2022, 14, 1474–1485. [Google Scholar] [CrossRef]
- Edgcumbe, D.R. Transcranial Direct Current Stimulation and Decision-Making: The Neuromodulation of Cognitive Reflection. Ph.D. Thesis, University of East London, London, UK, 2018. [Google Scholar]
- Gigerenzer, G.; Brighton, H. Homo Heuristicus: Why Biased Minds Make Better Inferences. Top. Cogn. Sci. 2009, 1, 107–143. [Google Scholar] [CrossRef] [PubMed]
- Parpart, P.; Jones, M.; Love, B.C. Heuristics as Bayesian Inference under Extreme Priors. Cogn. Psychol. 2018, 102, 127–144. [Google Scholar] [CrossRef] [PubMed]
- Hayne, S.C.; Smith, C.A.P.; Turk, D. The Effectiveness of Groups Recognizing Patterns. Int. J. Hum. Comput. Stud. 2003, 59, 523–543. [Google Scholar] [CrossRef]
- Satterthwaite, T.D.; Green, L.; Myerson, J.; Parker, J.; Ramaratnam, M.; Buckner, R.L. Dissociable but Inter-Related Systems of Cognitive Control and Reward during Decision Making: Evidence from Pupillometry and Event-Related FMRI. Neuroimage 2007, 37, 1017–1031. [Google Scholar] [CrossRef] [PubMed]
- Lafond, D.; DuCharme, M.B.; Gagnon, J.-F.; Tremblay, S. Support Requirements for Cognitive Readiness in Complex Operations. J. Cogn. Eng. Decis. Mak. 2012, 6, 393–426. [Google Scholar] [CrossRef]
- Tricco, A.C.; Lillie, E.; Zarin, W.; O’Brien, K.K.; Colquhoun, H.; Levac, D.; Moher, D.; Peters, M.D.J.; Horsley, T.; Weeks, L.; et al. PRISMA Extension for Scoping Reviews (PRISMA-ScR): Checklist and Explanation. Ann. Intern. Med. 2018, 169, 467–473. [Google Scholar] [CrossRef] [PubMed]
- Rabby, K.M.; Khan, M.; Karimoddini, A.; Jiang, S.X. An Effective Model for Human Cognitive Performance within a Human-Robot Collaboration Framework. In Proceedings of the 2019 IEEE International Conference on Systems, Man and Cybernetics (SMC), Bari, Italy, 6–9 October 2019. [Google Scholar]
- Ajoudani, A.; Zanchettin, A.M.; Ivaldi, S.; Albu-Schäffer, A.; Kosuge, K.; Khatib, O. Progress and Prospects of the Human–Robot Collaboration. Auton. Robots 2018, 42, 957–975. [Google Scholar] [CrossRef]
- Villani, V.; Pini, F.; Leali, F.; Secchi, C. Survey on Human–Robot Collaboration in Industrial Settings: Safety, Intuitive Interfaces and Applications. Mechatronics 2018, 55, 248–266. [Google Scholar] [CrossRef]
- Wang, L.; Gao, R.; Váncza, J.; Krüger, J.; Wang, X.V.; Makris, S.; Chryssolouris, G. Symbiotic Human-Robot Collaborative Assembly. CIRP Ann. 2019, 68, 701–726. [Google Scholar] [CrossRef]
- Alimardani, M.; Hiraki, K. Passive Brain-Computer Interfaces for Enhanced Human-Robot Interaction. Front. Robot. AI 2020, 7, 125. [Google Scholar] [CrossRef]
- Parra, P.S.; Calleros, O.L.; Ramirez-Serrano, A. Human-Robot Collaboration Systems: Components and Applications. In Proceedings of the 7th International Conference of Control Systems, and Robotics (CDSR’20), Niagara Falls, ON, Canada, 9–11 November 2020. [Google Scholar]
- Vicentini, F. Collaborative Robotics: A Survey. J. Mech. Des. 2020, 143, 1–29. [Google Scholar] [CrossRef]
- Cardoso, A.; Colim, A.; Bicho, E.; Braga, A.C.; Menozzi, M.; Arezes, P. Ergonomics and Human Factors as a Requirement to Implement Safer Collaborative Robotic Workstations: A Literature Review. Safety 2021, 7, 71. [Google Scholar] [CrossRef]
- Norton, A.; Admoni, H.; Crandall, J.; Fitzgerald, T.; Gautam, A.; Goodrich, M.; Saretsky, A.; Scheutz, M.; Simmons, R.; Steinfeld, A.; et al. Metrics for Robot Proficiency Self-Assessment and Communication of Proficiency in Human-Robot Teams. J. Hum.-Robot Interact. 2022, 11, 29. [Google Scholar] [CrossRef]
- Hopko, S.; Wang, J.; Mehta, R. Human Factors Considerations and Metrics in Shared Space Human-Robot Collaboration: A Systematic Review. Front. Robot. AI 2022, 9, 799522. [Google Scholar] [CrossRef] [PubMed]
- Szafir, D.; Szafir, D.A. Connecting Human-Robot Interaction and Data Visualization; Association for Computing Machinery: New York, NY, USA, 2021; pp. 281–292. [Google Scholar]
- Selvaggio, M.; Cognetti, M.; Nikolaidis, S.; Ivaldi, S.; Siciliano, B. Autonomy in Physical Human-Robot Interaction: A Brief Survey. IEEE Robot. Autom. Lett. 2021, 6, 7989–7996. [Google Scholar] [CrossRef]
- Sadrfaridpour, B.; Wang, Y. Collaborative Assembly in Hybrid Manufacturing Cells: An Integrated Framework for Human–Robot Interaction. IEEE Trans. Autom. Sci. Eng. 2018, 15, 1178–1192. [Google Scholar] [CrossRef]
- Rahman, S.M.M. Human Features-Based Variable Admittance Control for Improving HRI and Performance in Power-Assisted Heavy Object Manipulation. In Proceedings of the 2019 12th International Conference on Human System Interaction (HSI), Richmond, VA, USA, 25–27 June 2019. [Google Scholar]
- Riedelbauch, D.; Luthardt-Bergmann, D.; Henrich, D. A Cognitive Human Model for Virtual Commissioning of Dynamic Human-Robot Teams. In Proceedings of the 2021 Fifth IEEE International Conference on Robotic Computing (IRC), Taichung, Taiwan, 15–17 November 2021. [Google Scholar]
- Lemasurier, G.; Bejerano, G.; Albanese, V.; Parrillo, J.; Yanco, H.A.; Amerson, N.; Hetrick, R.; Phillips, E. Methods for Expressing Robot Intent for Human–Robot Collaboration in Shared Workspaces. J. Hum.-Robot Interact. 2021, 10, 40. [Google Scholar] [CrossRef]
- Cleaver, A.; Tang, D.V.; Chen, V.; Short, E.S.; Sinapov, J. Dynamic Path Visualization for Human-Robot Collaboration; Association for Computing Machinery: New York, NY, USA, 2021; pp. 339–343. [Google Scholar]
- Messeri, C.; Masotti, G.; Zanchettin, A.M.; Rocco, P. Human-Robot Collaboration: Optimizing Stress and Productivity Based on Game Theory. IEEE Robot. Autom. Lett. 2021, 6, 8061–8068. [Google Scholar] [CrossRef]
- Lagomarsino, M.; Lorenzini, M.; Balatti, P.; De Momi, E.; Ajoudani, A. Pick the Right Co-Worker: Online Assessment of Cognitive Ergonomics in Human-Robot Collaborative Assembly. IEEE Trans. Cogn. Dev. Syst. 2022, 15, 1928–1937. [Google Scholar] [CrossRef]
- Lagomarsino, M.; Lorenzini, M.; De Momi, E.; Ajoudani, A. Robot Trajectory Adaptation to Optimise the Trade-off between Human Cognitive Ergonomics and Workplace Productivity in Collaborative Tasks. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022. [Google Scholar]
- Zhou, Y.; Xu, Z.; Niu, Y.; Wang, P.; Wen, X.; Wu, X.; Zhang, D. Cross-Task Cognitive Workload Recognition Based on EEG and Domain Adaptation. IEEE Trans. Neural Syst. Rehabil. Eng. 2022, 30, 50–60. [Google Scholar] [CrossRef]
- Gualtieri, L.; Fraboni, F.; De Marchi, M.; Rauch, E. Development and Evaluation of Design Guidelines for Cognitive Ergonomics in Human-Robot Collaborative Assembly Systems. Appl. Ergon. 2022, 104, 103807. [Google Scholar] [CrossRef]
- Ramachandruni, K.; Kent, C.; Chernova, S. UHTP: A User-Aware Hierarchical Task Planning Framework for Communication-Free, Mutually-Adaptive Human-Robot Collaboration. J. Hum.-Robot Interact. 2023. [Google Scholar] [CrossRef]
- Eze, C.; Crick, C. Enhancing Human-Robot Collaboration by Exploring Intuitive Augmented Reality Design Representations; Association for Computing Machinery: New York, NY, USA, 2023; pp. 282–286. [Google Scholar]
- Kalatzis, A.; Rahman, S.; Prabhu, V.G.; Stanley, L.; Wittie, M. A Multimodal Approach to Investigate the Role of Cognitive Workload and User Interfaces in Human-Robot Collaboration; Association for Computing Machinery: New York, NY, USA, 2023; pp. 5–14. [Google Scholar]
- Puttero, S.; Verna, E.; Genta, G.; Galetto, M. Towards the Modelling of Defect Generation in Human-Robot Collaborative Assembly. Procedia CIRP 2023, 118, 247–252. [Google Scholar] [CrossRef]
- Zhu, Y.; Yang, C.; Tu, Z.; Ling, Y.; Chen, Y. A Haptic Shared Control Architecture for Tracking of a Moving Object. IEEE Trans. Ind. Electron. 2023, 70, 5034–5043. [Google Scholar] [CrossRef]
- Ruiz Garcia, M.A.; Rojas, R.; Gualtieri, L.; Rauch, E.; Matt, D. A Human-in-the-Loop Cyber-Physical System for Collaborative Assembly in Smart Manufacturing; Butala, P., Govekar, E., Vrabic, R., Eds.; Elsevier B.V.: Amsterdam, The Netherlands, 2019; Volume 81. [Google Scholar]
- Lambrecht, J.; Nimpsch, S. Human Prediction for the Natural Instruction of Handovers in Human Robot Collaboration. In Proceedings of the 2019 28th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), New Delhi, India, 14–18 October 2019. [Google Scholar]
- Saren, S.; Mukhopadhyay, A.; Ghose, D.; Biswas, P. Comparing Alternative Modalities in the Context of Multimodal Human–Robot Interaction. J. Multimodal User Interfaces 2023, 18, 69–85. [Google Scholar] [CrossRef]
- Memar, A.H.; Esfahani, E.T. Objective Assessment of Human Workload in Physical Human-Robot Cooperation Using Brain Monitoring. J. Hum.-Robot Interact. 2019, 9, 13. [Google Scholar] [CrossRef]
- Klaer, V.; Wibranek, B. Human Decisions for Robot Integration Task Allocation in a Plan Based Building Assignment. In Proceedings of the Companion of the 2020 ACM/IEEE International Conference on Human-Robot Interaction, Cambridge, UK, 23–26 March 2020. [Google Scholar]
- Newman, B.A.; Biswas, A.; Ahuja, S.; Girdhar, S.; Kitani, K.K.; Admoni, H. Examining the Effects of Anticipatory Robot Assistance on Human Decision Making. In International Conference on Social Robotics; Springer: Cham, Switzerland, 2020; Volume 12483. [Google Scholar]
- Zhou, T.; Cha, J.S.; Gonzalez, G.; Wachs, J.P.; Sundaram, C.P.; Yu, D. Multimodal Physiological Signals for Workload Prediction in Robot-Assisted Surgery. J. Hum.-Robot Interact. 2020, 9, 12. [Google Scholar] [CrossRef]
- Amanhoud, W.; Hernandez Sanchez, J.; Bouri, M.; Billard, A. Contact-Initiated Shared Control Strategies for Four-Arm Supernumerary Manipulation with Foot Interfaces. Int. J. Rob. Res. 2021, 40, 986–1014. [Google Scholar] [CrossRef]
- Rossato, C.; Pluchino, P.; Cellini, N.; Jacucci, G.; Spagnolli, A.; Gamberini, L. Facing with Collaborative Robots: The Subjective Experience in Senior and Younger Workers. Cyberpsychol. Behav. Soc. Netw. 2021, 24, 349–356. [Google Scholar] [CrossRef]
- Fraboni, F.; Gualtieri, L.; Millo, F.; De Marchi, M.; Pietrantoni, L.; Rauch, E. Human-Robot Collaboration During Assembly Tasks: The Cognitive Effects of Collaborative Assembly Workstation Features. In Proceedings of the 21st Congress of the International Ergonomics Association (IEA 2021), Virtual, 13–18 June 2021; Volume 223. [Google Scholar]
- Gualtieri, L.; Fraboni, F.; De Marchi, M.; Rauch, E. Evaluation of Variables of Cognitive Ergonomics in Industrial Human-Robot Collaborative Assembly Systems. In Proceedings of the 21st Congress of the International Ergonomics Association (IEA 2021) Virtual, 13–18 June 2021; Volume 223. [Google Scholar]
- Bales, G.; Kong, Z. Neurophysiological and Behavioral Differences in Human-Multiagent Tasks: An EEG Network Perspective. J. Hum.-Robot Interact. 2022, 11, 42. [Google Scholar] [CrossRef]
- Howell-Munson, A.; Doherty, E.; Gavriel, P.; Nicolas, C.; Norton, A.; Neamtu, R.; Yanco, H.; Wu, Y.-N.; Solovey, E.T. Towards Brain Metrics for Improving Multi-Agent Adaptive Human-Robot Collaboration: A Preliminary Study; Association for Computing Machinery: New York, NY, USA, 2022; p. 11. [Google Scholar]
- Messeri, C. Enhancing the Quality of Human-Robot Cooperation Through the Optimization of Human Well-Being and Productivity. In SpringerBriefs in Applied Sciences and Technology; Springer: Cham, Switzerland, 2023; pp. 15–25. [Google Scholar]
- Panchetti, T.; Pietrantoni, L.; Puzzo, G.; Gualtieri, L.; Fraboni, F. Assessing the Relationship between Cognitive Workload, Workstation Design, User Acceptance and Trust in Collaborative Robots. Appl. Sci. 2023, 13, 1720. [Google Scholar] [CrossRef]
- Hostettler, D.; Bektaş, K.; Mayer, S. Pupillometry for Measuring User Response to Movement of an Industrial Robot; Association for Computing Machinery: New York, NY, USA, 2023; p. 52. [Google Scholar]
- Luo, Y.; Chen, Y.; Hu, B. Multisensory Evaluation of Human-Robot Interaction in Retail Stores—The Effect of Mobile Cobots on Individuals’ Physical and Neurophysiological Responses; Association for Computing Machinery: New York, NY, USA, 2023; pp. 403–406. [Google Scholar]
- Karakikes, M.; Nathanael, D. The Effect of Cognitive Workload on Decision Authority Assignment in Human–Robot Collaboration. Cogn. Technol. Work 2023, 25, 31–43. [Google Scholar] [CrossRef]




| Inclusive Criteria | Exclusive Criteria |
|---|---|
| journal articles conference papers book chapters published from 2019 to 2023 written in English quantitative, qualitative, and mixed-method | autonomous mobile robot, telerobot, AI bot, social robot, military robot machine learning, reinforcement learning robot decision making, algorithmic decision making, decision making modelling, robot planning process conversation or voice agent design process |
| Human Decision making and Cognitive Workload | HRC |
|---|---|
| “cognitive workload” OR “human decision” | “human–robot collaboration” OR cobot* OR “collaborative robot*” OR “human–robot interaction” |
| Research Type | Study | Setting | Sample Size | Measures | Factors Were Measured |
|---|---|---|---|---|---|
| Conceptual Research | [36] | Virtual Environment | -- | -- | Cognitive workload |
| Review | [17,37,38,39,40,41,42,43,44,45] | -- | -- | -- | -- |
| Survey and Analysis | [46,47] | -- | -- | -- | -- |
| Design and Development | [48] | Laboratory | -- | NASA-TLX | Cognitive workload |
| [49] | Laboratory | -- | NASA-TLX | Cognitive workload | |
| [50] | Virtual Environment | -- | -- | ||
| [51] | Laboratory | 92 | NASA-TLX | Cognitive workload | |
| [52] | Virtual Environment | 36 | NASA-TLX | Cognitive workload | |
| [53] | Laboratory | -- | HRV | Stress | |
| [54] | Laboratory | -- | NASA-TLX, HRV, Skin response | Cognitive workload | |
| [55] | Laboratory | -- | HRV | Cognitive workload | |
| [56] | Laboratory | -- | EEG | Cognitive workload | |
| [57] | Laboratory | 14 | System Acceptance Scale, NASA-TLX, SSSQ, Trust in Industrial Human–robot Collaboration Scale, System Usability Scale, observation, video recording, semi-structured interview | Trust, acceptance, Satisfaction, Stress, Cognitive workload | |
| [58] | Laboratory, Virtual environment | 35 | NASA-TLX | Cognitive workload | |
| [59] | Online Survey | 14 | Online Survey | -- | |
| [60] | Laboratory | 15 | HRV, NASA-TLX | Cognitive workload | |
| [61] | Laboratory | 52 | -- | -- | |
| [62] | Laboratory | -- | Eye-tracking, Likert-scale survey | Control method | |
| Implementation | [63] | Laboratory | -- | -- | -- |
| [64] | Laboratory | -- | NASA-TLX | Cognitive workload | |
| Evaluation | [65] | Laboratory | 8 | NASA-TLX | Cognitive workload |
| Empirical Research | [66] | Laboratory | 18 | EEG, NASA-TLX | Cognitive workload |
| [67] | Laboratory | 12 | -- | -- | |
| [68] | Laboratory | 99 | -- | -- | |
| [69] | Virtual environment | 12 | EEG, EMG, HRV, EDA, MOV, NASA-TLX | Cognitive workload | |
| [70] | Laboratory | -- | Questionnaire of fluency perception, NASA-TLX | Cognitive workload | |
| [71] | Laboratory | 20 | TAM questionnaire, System Usability Scale, User Experience, NASA-TLX | Acceptance, Usability, Cognitive workload | |
| [72] | Laboratory | 14 | Eye-tracking, NASA-TLX, System Usability Scale | Feedback, Cognitive workload, Usability | |
| [73] | Laboratory | -- | Observation, video recording, semi-structured interview | Usability, Trust, Satisfaction, physical workload, Cognitive workload | |
| [74] | Laboratory | -- | Eye-tracking, EEG, Motion Capture | Cognitive workload | |
| [75] | Laboratory | 12 | fNIRS, pre- and post-experiment questionnaires | Physical workload, Cognitive workload | |
| [76] | Realistic Scenarios | 47 | HRV | Stress | |
| [77] | Laboratory | -- | System Acceptance Scale, System Usability Scale, NASA-TLX, SSSQ, Trust in Industrial Human–robot Interaction Questionnaire, Eye-tracking | Acceptance, Usability, Cognitive workload, Stress, Trust | |
| [78] | Laboratory | 7 | Eye-tracking, verbal report | Cognitive workload | |
| [79] | -- | 8 | Upper-limb kinematics, Muscle activity, Eye-tracking | Cognitive workload | |
| [80] | Laboratory | 21 | NASA-TLX, Preference of Automation Level | Cognitive workload |
| Cobot | Study |
|---|---|
| UR3, UR3e (6-DoF) | [57,60,61,63,72,73,77] |
| UR5, UR5e (6-DoF) | [62,64,75,79] |
| UR10, UR10e (6-DoF) | [62,67,71] |
| UR16e (6-DoF) | [55] |
| SCHUNK PowerBall LWA 4P (6-DoF) | [66] |
| KUKA LWR4+ (7-DoF) | [70] |
| Franka Emika Panda (7-DoF) | [54,80] |
| JACO robotic arm (7-DoF) | [58] |
| UFACTORY xArm 7 (7-DoF) | [78] |
| Baxter (dual-arm) | [51] |
| ABB YuMi (dual-arm) | [53,76] |
| Dobot (4-DoF) | [65] |
| da Vinci surgical robot | [69] |
| virtual cobot | [50] |
| Human Factors | Robot Factors | Communication Factors | Environment Factors |
|---|---|---|---|
| trust [17,45,48,57,73,77] | physical attribute of the robot [39,70,72] | user interface [37,38,42,46,51,60,63,64,73] | dynamic of the situation [75] |
| acceptance [17,57,71,77] | robot errors [36,55] | control modality [37,65,71] | task complexity [36,55,66,69,80] |
| human characteristics [39] | trajectory and movement [53,55,78] | feedback [39,48,51,52,62,72] | design of workspace [39,73,77] |
| physical workload [50] | role of the robot [61,76,80] | usability [71,73] | physical safety [42] |
| cognitive workload [40] | automation level [17,44,47,72] | human intent prediction [59,68] | |
| operator’s ability [39,41,67,74,76,79] | mutual awareness [17,41,46,68] | ||
| stress [57,76,77] | |||
| feeling of satisfaction or frustration [57,73] | |||
| perception of the situation and environment [45,49] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Caldwell, G.; Rittenbruch, M.; Belek Fialho Teixeira, M.; Burden, A.; Guertler, M. What Affects Human Decision Making in Human–Robot Collaboration?: A Scoping Review. Robotics 2024, 13, 30. https://doi.org/10.3390/robotics13020030
Liu Y, Caldwell G, Rittenbruch M, Belek Fialho Teixeira M, Burden A, Guertler M. What Affects Human Decision Making in Human–Robot Collaboration?: A Scoping Review. Robotics. 2024; 13(2):30. https://doi.org/10.3390/robotics13020030
Chicago/Turabian StyleLiu, Yuan, Glenda Caldwell, Markus Rittenbruch, Müge Belek Fialho Teixeira, Alan Burden, and Matthias Guertler. 2024. "What Affects Human Decision Making in Human–Robot Collaboration?: A Scoping Review" Robotics 13, no. 2: 30. https://doi.org/10.3390/robotics13020030
APA StyleLiu, Y., Caldwell, G., Rittenbruch, M., Belek Fialho Teixeira, M., Burden, A., & Guertler, M. (2024). What Affects Human Decision Making in Human–Robot Collaboration?: A Scoping Review. Robotics, 13(2), 30. https://doi.org/10.3390/robotics13020030