

Are Friendly Robots Trusted More? An Analysis of Robot Sociability and Trust


Abstract
:1. Introduction
1.1. Trust in Robot Care Support
1.2. Robot Sociability and Trust
1.3. Overview of Studies
2. Study 1
2.1. Method
- Recruitment and Sample Characteristics
2.2. Study 1 Materials and Measures
- Video Stimuli Development
- Survey Material
- Perception of Sociability
- Perceived Trust
- Demographics
- Study Procedure
2.3. Study 1 Analytical Procedures
3. Study 1 Results
4. Study 1 Discussion
5. Study 2
5.1. Method
- Recruitment and Sample Characteristics
5.2. Study 2 Materials and Measures
- Video Stimuli Development
- Survey Updates
- Study 2 Survey
- Perceived Trust
- Perception of Sociability
5.3. Data Analyses Procedures
6. Study 2 Results
6.1. Study 2 Descriptive Statistics
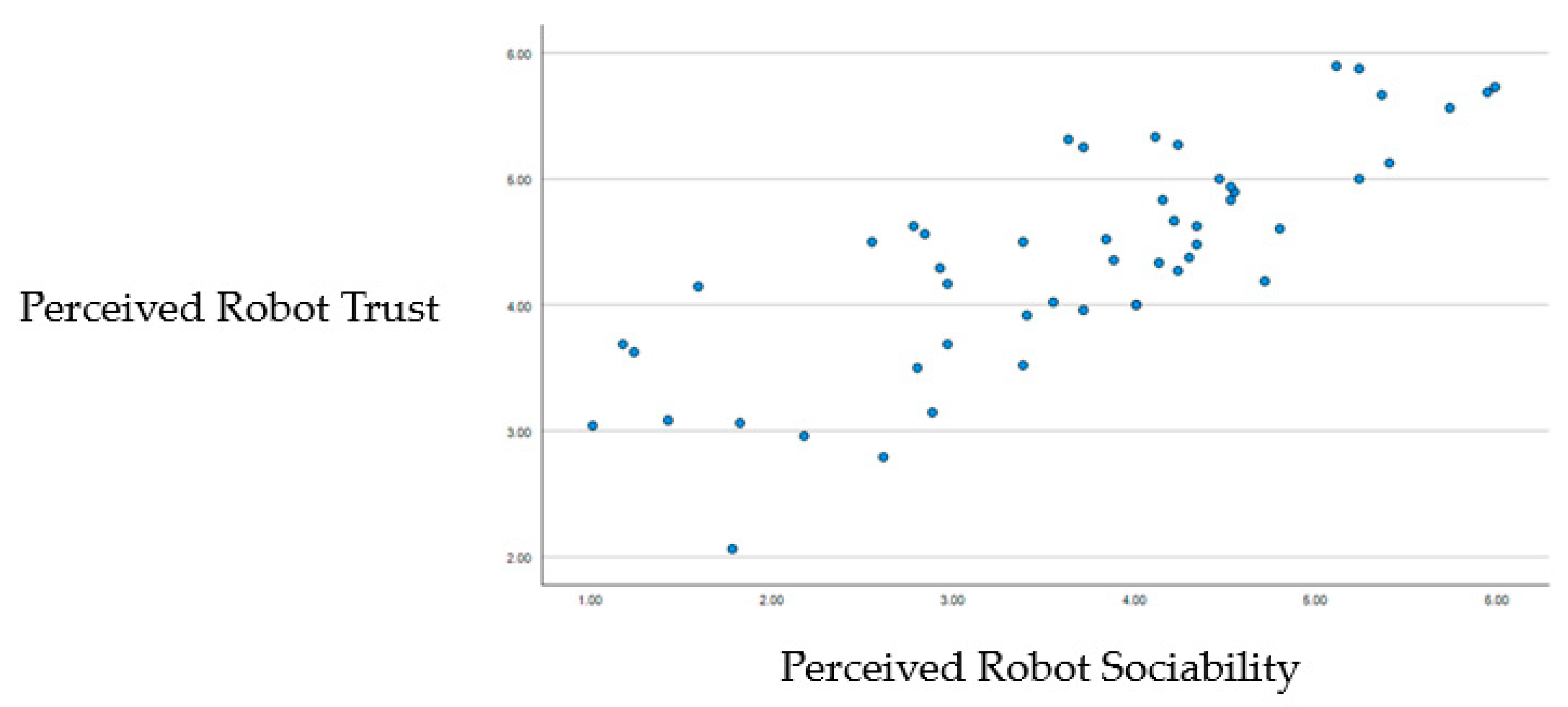
6.2. Study 2 Relationship between Sociability and Trust
6.3. Study 2 Full Regression Model Results
7. Study 2 Discussion
8. General Discussion and Future Work
9. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rogers, W.A.; Ramadhani, W.A.; Harris, M.T. Technologies for ageing in place in the real world. Gerontologist 2020, 60, 610–618. [Google Scholar] [CrossRef]
- Wiles, J.L.; Leibing, A.; Guberman, N.; Reeve, J.; Allen, R.E. The meaning of “aging in place” to older people. Gerontologist 2012, 52, 357–366. [Google Scholar] [CrossRef] [PubMed]
- Kadylak, T.; Bayles, M.A.; Galoso, L.; Chan, M.; Mahajan, H.; Kemp, C.; Edsinger, A.; Rogers, W.A. A human factors analysis of the Stretch mobile manipulator robot. In Proceedings of the Human Factors and Ergonomics Society 65th Annual Meeting, Baltimore, MD, USA, 3–8 October 2021; pp. 442–446. [Google Scholar]
- Sharkawy, A.N. A survey on applications of human-robot interaction. Sens. Transducers 2021, 251, 19–27. [Google Scholar]
- Broadbent, E.; Stafford, R.; MacDonald, B. Acceptance of healthcare robots for the older population: Review and future directions. Int. J. Soc. Robot. 2009, 1, 319–330. [Google Scholar] [CrossRef]
- Breazeal, C.L.; Ostrowski, A.K.; Singh, N.; Park, H.W. Designing social robots for older adults. Natl. Acad. Eng. Bridge 2019, 49, 22–31. [Google Scholar]
- Langer, A.; Feingold-Polak, R.; Mueller, O.; Kellmeyer, P.; Levy-Tzedek, S. Trust in socially assistive robots: Considerations for use in rehabilitation. Neurosci. Biobehav. Rev. 2019, 104, 231–239. [Google Scholar] [CrossRef] [PubMed]
- Stuck, R.E.; Rogers, W.A. Older adults’ perceptions of supporting factors of trust in a robot care provider. J. Robot. 2018, 2018, 6519713. [Google Scholar] [CrossRef]
- Hancock, P.A.; Billings, D.R.; Schaefer, K.E.; Chen, J.Y.; De Visser, E.J.; Parasuraman, R. A meta-analysis of factors affecting trust in human-robot interaction. Hum. Factors 2011, 53, 517–527. [Google Scholar] [CrossRef] [PubMed]
- Haring, K.S.; Matsumoto, Y.; Watanabe, K. How do people perceive and trust a lifelike robot. In Proceedings of the World Congress on Engineering and Computer Science, Las Vegas, NV, USA, 22–25 July 2013; Volume 1, pp. 425–430. [Google Scholar]
- Mazursky, A.; DeVoe, M.; Sebo, S. Physical Touch from a Robot Caregiver: Examining Factors that Shape Patient Experience. In Proceedings of the 2022 31st IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), Napoli, Italy, 29 August–2 September 2022; pp. 1578–1585. [Google Scholar]
- Townsend, D.; MajidiRad, A. Trust in Human-Robot Interaction Within Healthcare Services: A Review Study. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, St. Louis, MO, USA, 14–17 August 2022; Volume 86281, p. V007T07A030. [Google Scholar]
- May, D.C.; Holler, K.J.; Bethel, C.L.; Strawderman, L.; Carruth, D.W.; Usher, J.M. Survey of factors for the prediction of human comfort with a non-anthropomorphic robot in public spaces. Int. J. Soc. Robot. 2017, 9, 165–180. [Google Scholar] [CrossRef]
- Saunderson, S.; Nejat, G. How robots influence humans: A survey of nonverbal communication in social human–robot interaction. Int. J. Soc. Robot. 2019, 11, 575–608. [Google Scholar] [CrossRef]
- Breazeal, C. Toward sociable robots. Robot. Auton. Syst. 2003, 42, 167–175. [Google Scholar] [CrossRef]
- Tajfel, H. Turner An integrative theory of intergroup conflict. Organ. Identity A Read. 1979, 56, 9780203505984-16. [Google Scholar]
- Byrne, D. The Attraction Paradigm; Academic Press: New York, NY, USA, 1971. [Google Scholar]
- Berger, C.R.; Calabrese, R.J. Some explorations in initial interaction and beyond: Toward a developmental theory of interpersonal communication. Hum. Commun. Res. 1974, 1, 99–112. [Google Scholar] [CrossRef]
- Heerink, M.; Krose, B.; Evers, V.; Wielinga, B. Assessing acceptance of assistive social agent technology by older adults: The Almere model. Int. J. Soc. Robot. 2010, 2, 361–375. [Google Scholar] [CrossRef]
- Harris, P.A.; Taylor, R.; Thielke, R.; Payne, J.; Gonzalez, N.; Conde, J.G. Research electronic data capture (REDCap)—A metadata-driven methodology and workflow process for providing translational research informatics support. J. Biomed. Inform. 2009, 42, 377–381. [Google Scholar] [CrossRef]
- Sabanović, S.; Chang, W.L.; Bennett, C.C.; Piatt, J.A.; Hakken, D. A robot of my own: Participatory design of socially assistive robots for independently living older adults diagnosed with depression. In International Conference on Human Aspects of IT for the Aged Population; Springer: Berlin/Heidelberg, Germany, 2015; pp. 104–114. [Google Scholar]
- Louie, W.Y.G.; McColl, D.; Nejat, G. Acceptance and attitudes toward a human-like socially assistive robot by older adults. Assist. Technol. 2014, 26, 140–150. [Google Scholar] [CrossRef]
- Tamantini, C.; di Luzio, F.S.; Hromei, C.D.; Cristofori, L.; Croce, D.; Cammisa, M.; Cristofaro, A.; Marabello, M.V.; Basili, R.; Zollo, L. Integrating Physical and Cognitive Interaction Capabilities in a Robot-Aided Rehabilitation Platform. EEE Syst. J. 2023, 1–12. Available online: https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=10269076 (accessed on 4 September 2023). [CrossRef]
- Casas, J.A.; Céspedes, N.; Cifuentes, C.A.; Gutierrez, L.F.; Rincón-Roncancio, M.; Múnera, M. Expectation vs. reality: Attitudes towards a socially assistive robot in cardiac rehabilitation. Appl. Sci. 2019, 9, 4651. [Google Scholar] [CrossRef]
- Bradshaw, J.M.; Hoffman, R.R.; Woods, D.D.; Johnson, M. The seven deadly myths of “autonomous systems”. IEEE Intell. Syst. 2013, 28, 54–61. [Google Scholar] [CrossRef]
- Rogers, W.A.; Kadylak, T.; Bayles, M.A. Maximizing the benefits of participatory design for human–robot interaction research with older adults. Hum. Factors 2022, 64, 441–450. [Google Scholar] [CrossRef] [PubMed]
- Rhee, D. Older Adults’ Perceptions towards Socially Assistive Robots: Connecting Trust and Perceived Sociability. Master’s Thesis, University of Illinois Urbana-Champaign, Champaign, IL, USA, 2020, unpublished. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frequency | Percentage | |
|---|---|---|
| Gender | ||
| Male | 23 | 45.1% |
| Female | 28 | 54.9% |
| Education | ||
| No formal education | 0 | 0% |
| Less than high school graduate | 0 | 0% |
| High school graduate/GED | 2 | 3.9% |
| Vocational training | 0 | 0% |
| Some college/associate’s degree | 3 | 5.9% |
| Bachelor’s degree | 25 | 49% |
| Master’s degree | 8 | 15.7% |
| Doctoral degree | 13 | 25.5% |
| Marital Status | ||
| Single | 4 | 7.9% |
| Married | 35 | 68.6% |
| Divorced | 2 | 3.9% |
| Widowed | 8 | 15.7% |
| Do not wish to answer | 2 | 3.9% |
| Racial Group | ||
| Asian | 11 | 21.6% |
| Black or African American | 1 | 2% |
| White | 21 | 41.2% |
| More than one race | 1 | 2% |
| Do not wish to answer | 17 | 33.4% |
| Household Income | ||
| Less than $25,000 | 2 | 3.9% |
| $25,000~$49,999 | 5 | 9.8% |
| $50,000~$74,999 | 8 | 15.7% |
| $75,000 or more | 19 | 37.3% |
| Do not wish to answer | 16 | 31.3% |
| Do not know for certain | 1 | 2% |
| Original Version | Adapted Version |
|---|---|
| I consider iCat a pleasant conversational partner. | I think the robot is a pleasant conversational partner. |
| I find iCat pleasant to interact with. | I think the robot is pleasant to interact with. |
| I find iCat understands me. | I think the robot understands me. |
| I think iCat is nice. | I think the robot is nice. |
| Original Version | Adapted Version |
|---|---|
| I would trust the robot if it gave me advice [19]. | I think I would trust the robot if it gave me advice. |
| If I would give the robot information, it would not abuse this [19]. | I think if I would give the robot information, it would not abuse this. |
| I find the robot reliable [22]. | I think the robot is reliable. |
| It gave me confidence that the robot guides my therapy [24]. | I think I have confidence that the robot guides the task. |
| Frequency | Percentage | |
|---|---|---|
| Gender | ||
| Male | 9 | 21% |
| Female | 34 | 79% |
| Education | ||
| High school graduate/GED | 1 | 2% |
| Vocational training | 1 | 2% |
| Some college/associate’s degree | 6 | 14% |
| Bachelor’s degree | 6 | 14% |
| Master’s degree | 22 | 51% |
| Doctoral degree | 7 | 16% |
| Marital Status | ||
| Single | 5 | 12% |
| Married | 28 | 65% |
| Divorced | 3 | 7% |
| Widowed | 7 | 16% |
| Racial Group | ||
| Asian | 1 | 2% |
| Black or African American | 5 | 12% |
| White | 37 | 86% |
| Household Income | ||
| Less than $25,000 | 3 | 7% |
| $25,000~$49,999 | 5 | 12% |
| $50,000~$74,999 | 10 | 23% |
| $75,000 or more | 25 | 58% |
| Variables | Mean | SD |
|---|---|---|
| Relay | 4.15 | 1.34 |
| Hollie | 3.97 | 1.48 |
| PR2 | 3.44 | 1.50 |
| Care-O-Bot | 3.42 | 1.45 |
| Stretch | 3.29 | 1.45 |
| Tiago | 3.22 | 1.48 |
| Overall Sociability | 3.58 | 1.32 |
| Variables | Mean | SD |
|---|---|---|
| Hollie | 4.70 | 1.01 |
| Relay | 4.69 | 0.93 |
| PR2 | 4.44 | 0.98 |
| Care-O-Bot | 4.25 | 1.06 |
| Stretch | 4.21 | 1.06 |
| Tiago | 3.86 | 1.17 |
| Overall Trust | 4.36 | 0.91 |
| Independent Variables | B | SE | p-Value |
|---|---|---|---|
| Overall Robot Sociability | 0.56 | 0.08 | p < 0.001 |
| Age | −0.01 | 0.02 | p > 0.05 |
| Gender | −0.29 | 0.22 | p > 0.05 |
| African American | −0.72 | 0.35 | p = 0.5 |
| Asian | −1.03 | 0.76 | p > 0.05 |
| Annual Income | −0.27 | 0.14 | p > 0.05 |
| Single | −0.22 | 0.28 | p > 0.05 |
| Divorced | −0.58 | 0.40 | p > 0.05 |
| Widowed | 0.21 | 0.28 | p > 0.05 |
| Education | −0.11 | 0.09 | p > 0.05 |
| Self-Reported Health Status | 0.12 | 0.10 | p > 0.05 |
| Constant | 4.65 | 1.79 | p < 0.05 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kadylak, T.; Bayles, M.A.; Rogers, W.A. Are Friendly Robots Trusted More? An Analysis of Robot Sociability and Trust. Robotics 2023, 12, 162. https://doi.org/10.3390/robotics12060162
Kadylak T, Bayles MA, Rogers WA. Are Friendly Robots Trusted More? An Analysis of Robot Sociability and Trust. Robotics. 2023; 12(6):162. https://doi.org/10.3390/robotics12060162
Chicago/Turabian StyleKadylak, Travis, Megan A. Bayles, and Wendy A. Rogers. 2023. "Are Friendly Robots Trusted More? An Analysis of Robot Sociability and Trust" Robotics 12, no. 6: 162. https://doi.org/10.3390/robotics12060162
APA StyleKadylak, T., Bayles, M. A., & Rogers, W. A. (2023). Are Friendly Robots Trusted More? An Analysis of Robot Sociability and Trust. Robotics, 12(6), 162. https://doi.org/10.3390/robotics12060162