
A Critical Review and Systematic Design Approach for Linkage-Based Gait Rehabilitation Devices




Abstract
1. Introduction
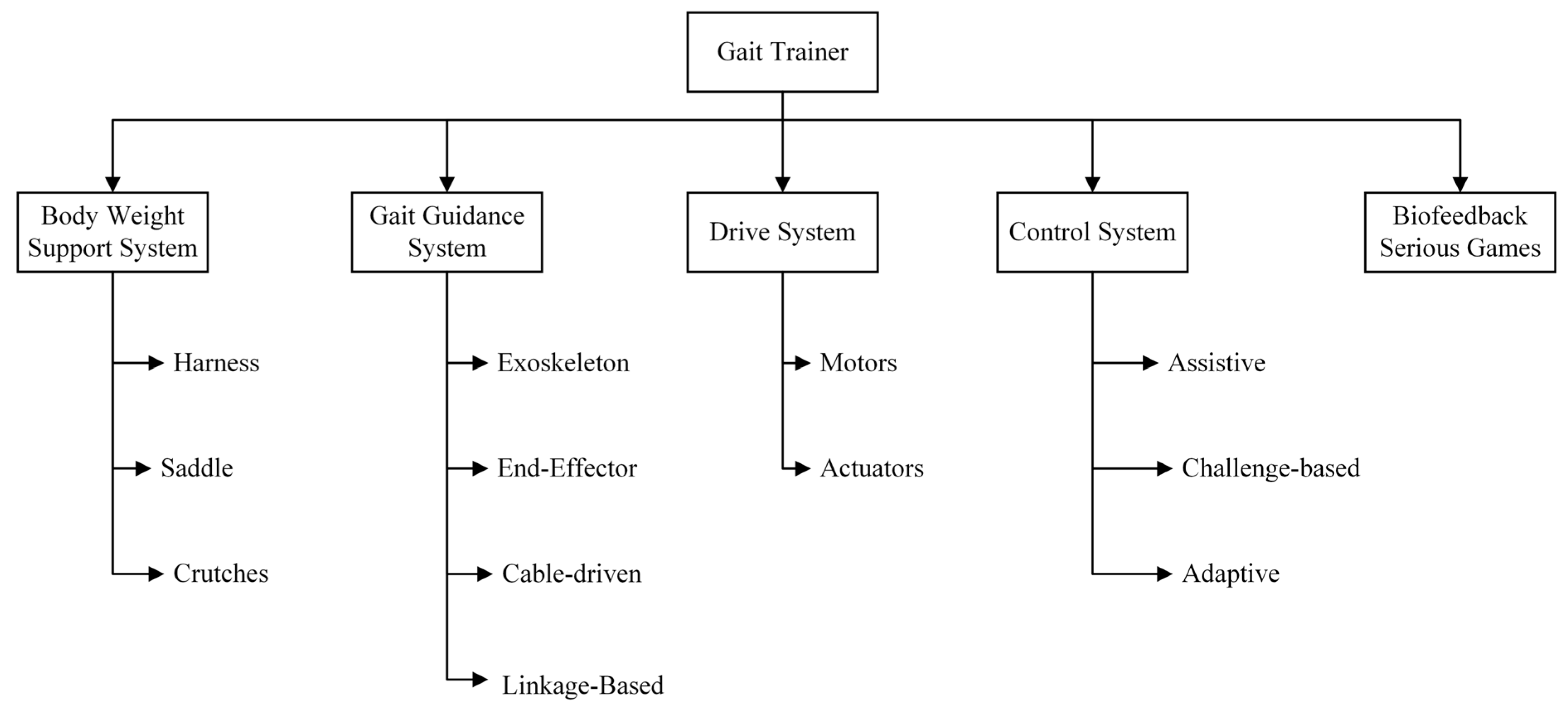
2. Current Gait Training Devices
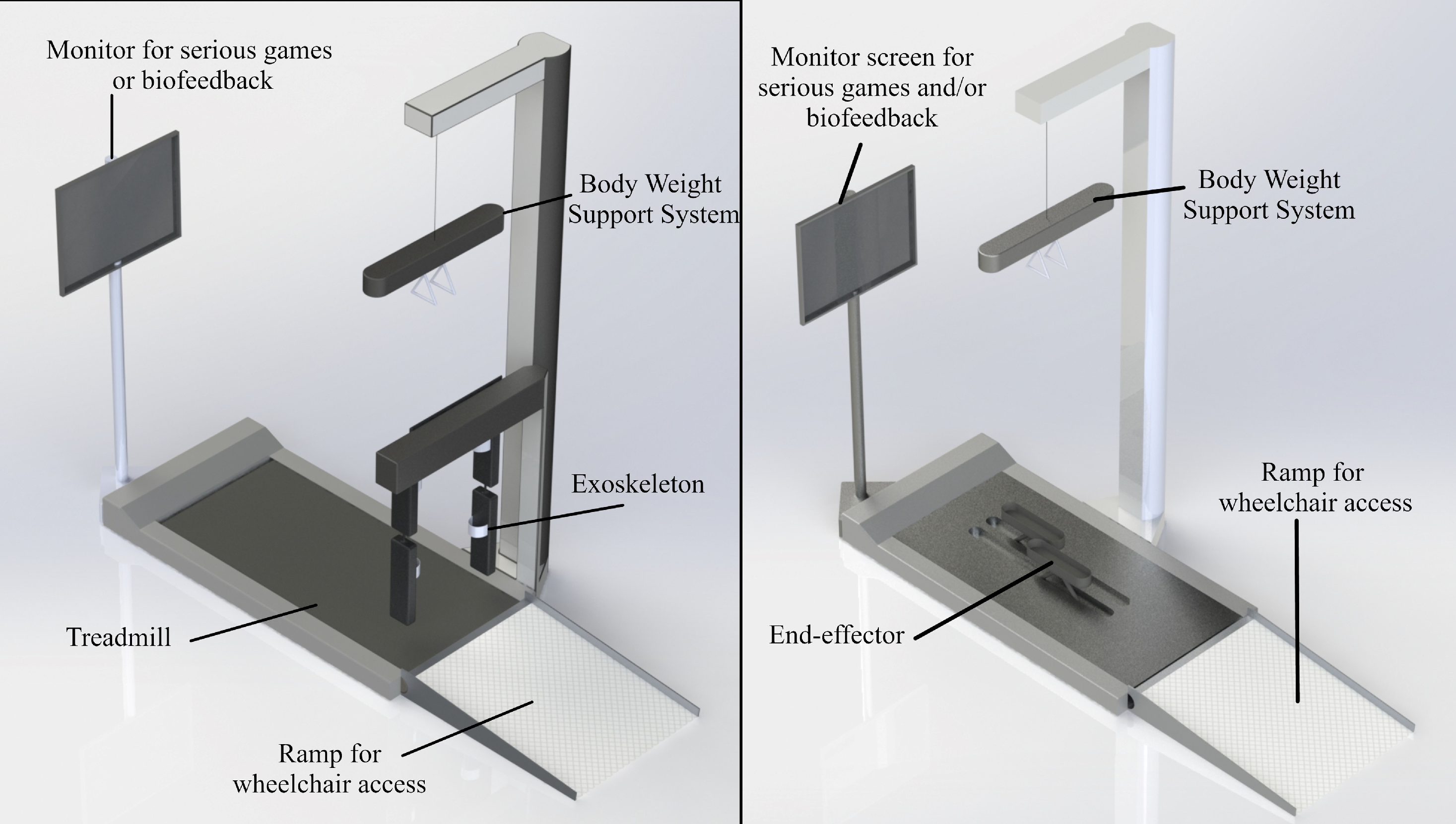
2.1. Exoskeleton
2.2. End-Effector
2.3. Mobile Powered
2.4. Ankle Joint Assist
2.5. Cable-Driven
3. Search Methodology
4. Linkage-Based Devices
- Simplicity and low volume;
- Kinematic accuracy compared to human natural gait;
- Maximization of sensory inputs;
- Adaptability to different subjects.
4.1. Planar Four-Bar Linkages
4.2. Planar Five-Bar Linkages and Six Bar-Linkages
4.3. Planar Higher-Order Linkages and Spatial Linkages
4.4. Critical Analysis and Discussion
5. Key Points towards the Design of New Linkage-Based Devices
- References to serve as gait baselines, preferably from a database or normative data;
- Topology selection criteria and the kinematic synthesis process;
- Measurement systems and accuracy characteristics used to obtain experimental data;
- Kinematic accuracy indicator(s) aligned with the literature and clinical gait analysis;
- Compatibility with the Bernstein principle “repetition without repetition”;
- Possibility of gradual training towards a final kinematic trajectory;
- Target population based on anthropometrical lengths and sizes, grouped.
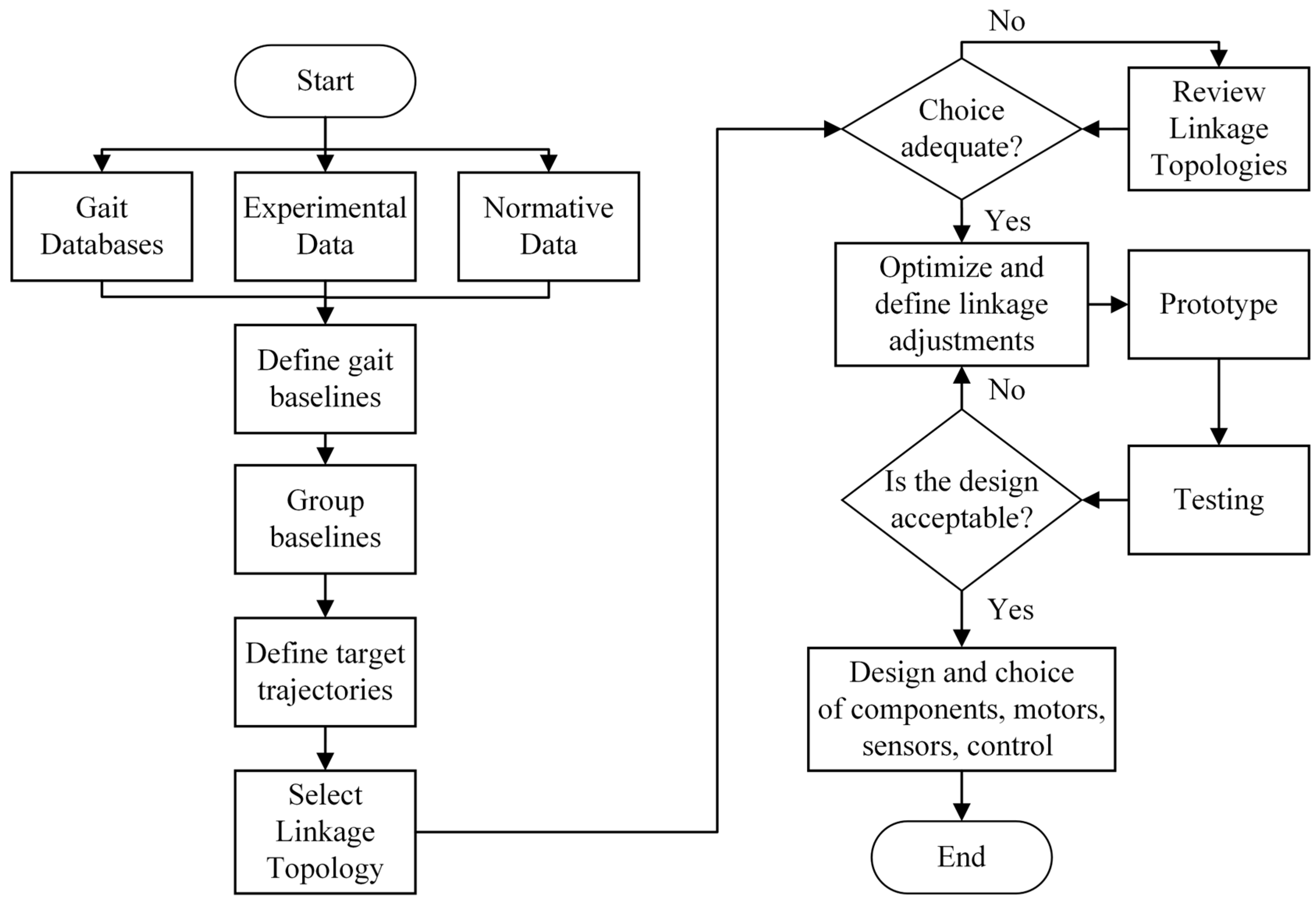
6. A Possible New Design of a Linkage-Based Gait Trainer
6.1. Gait Baselines
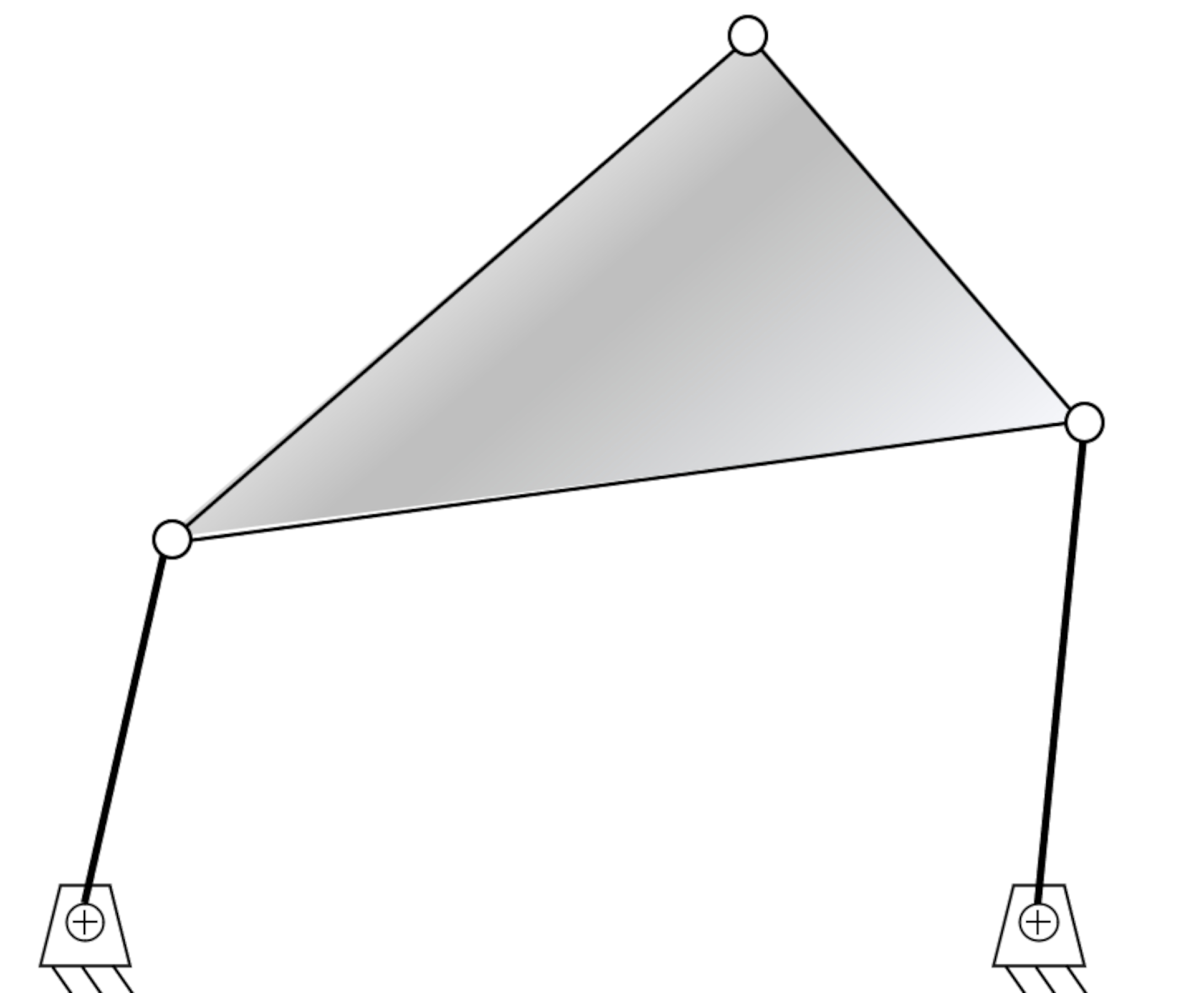
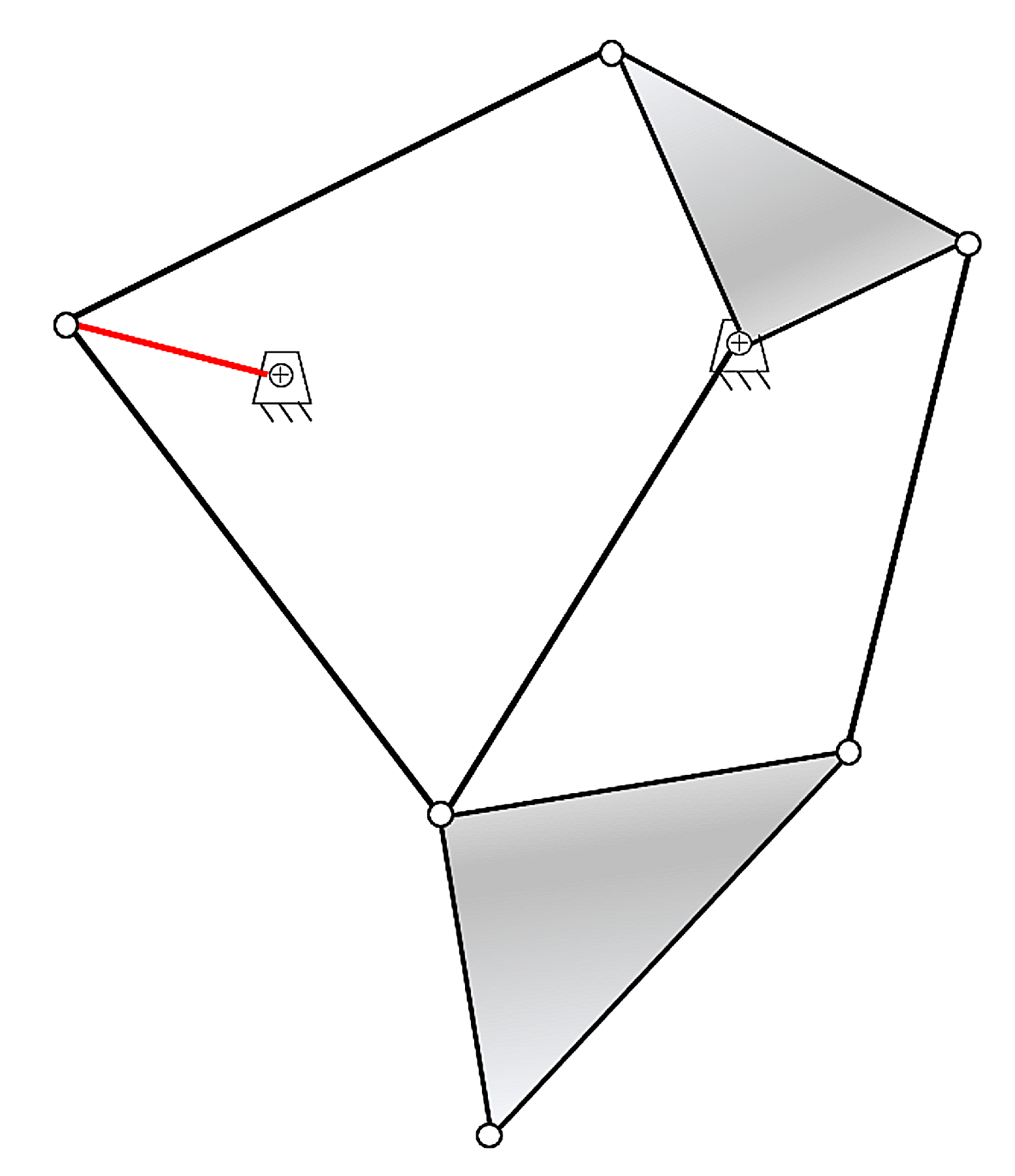
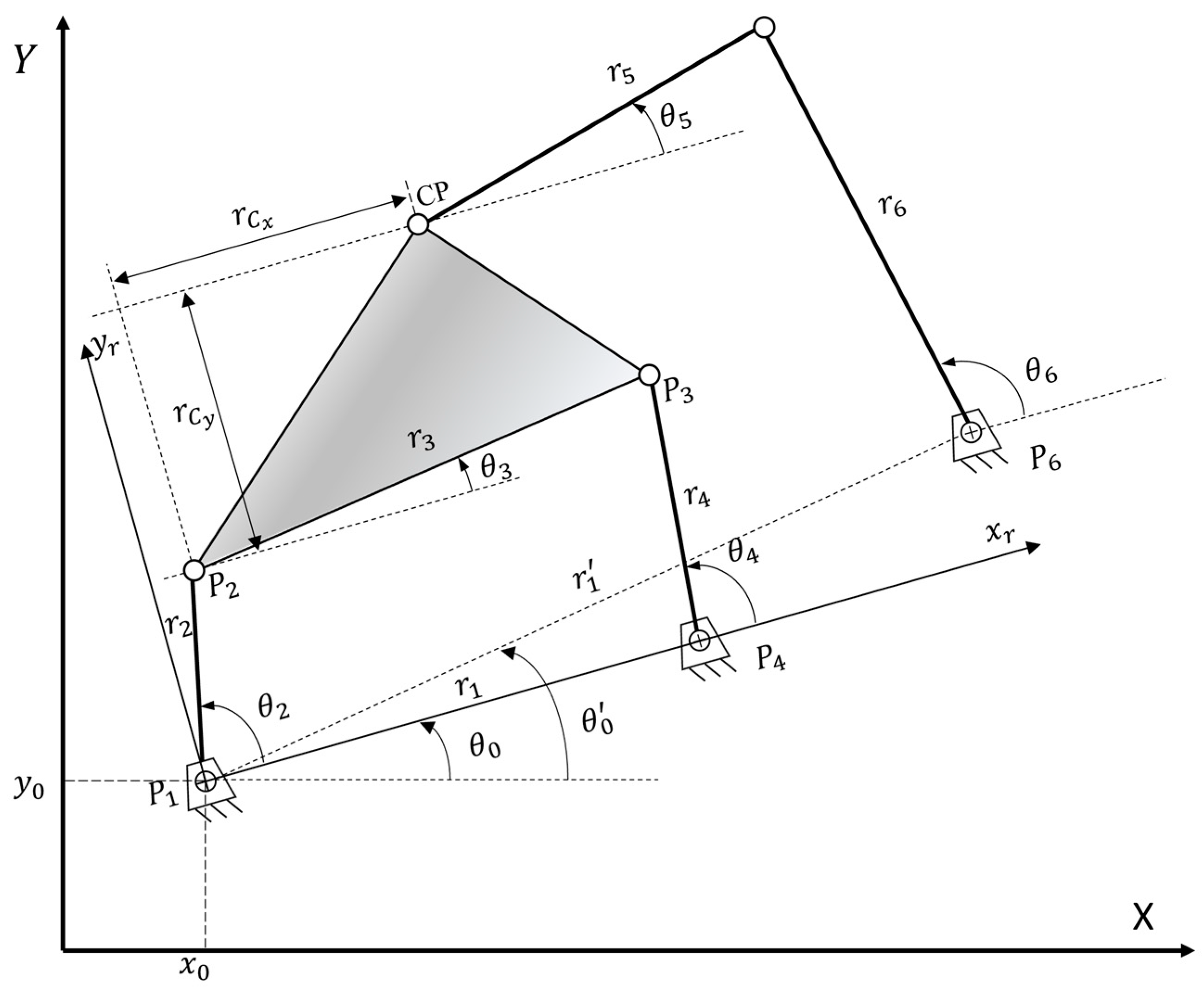
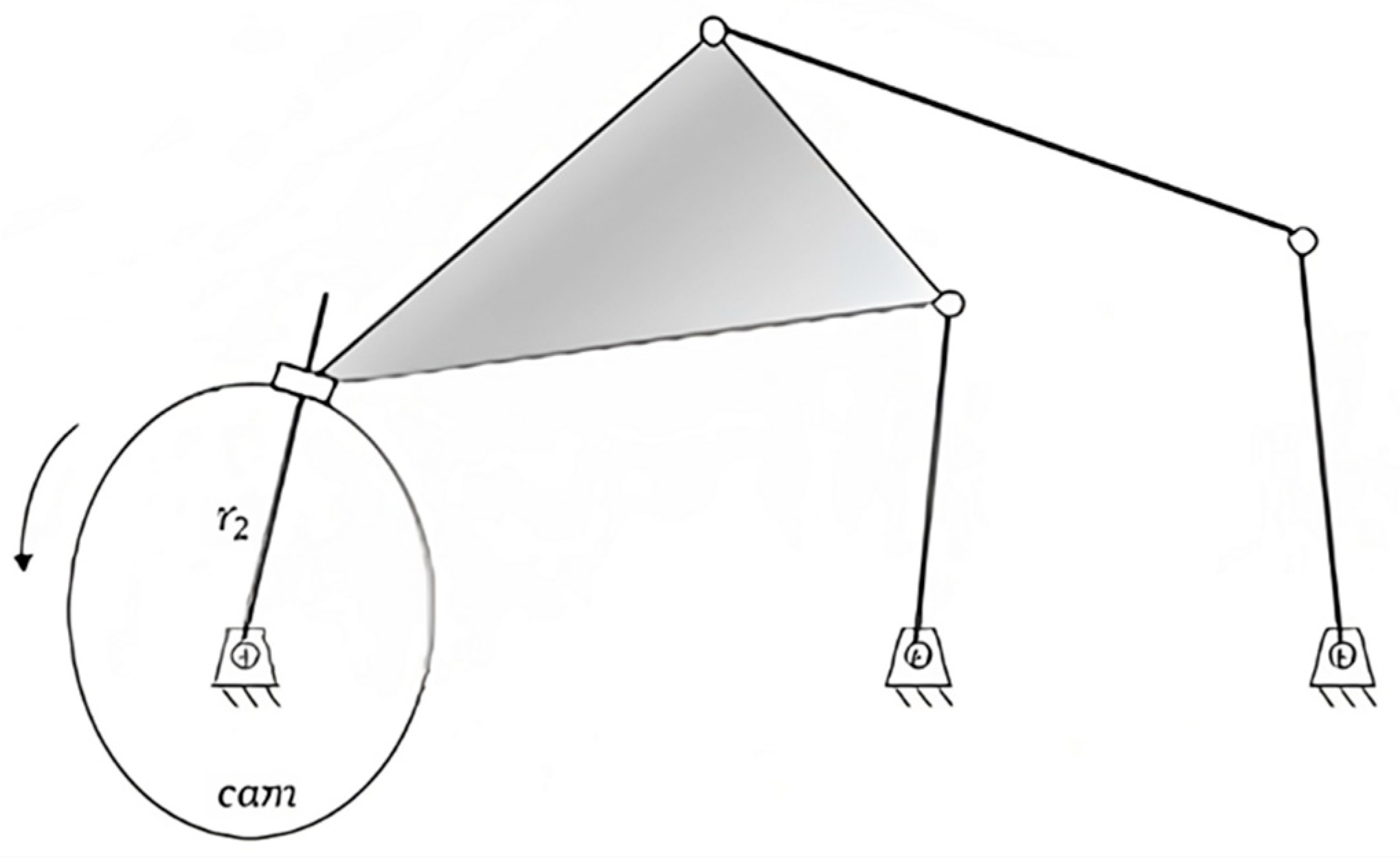
6.2. Linkage Topology Choice, Synthesis, and Optimization
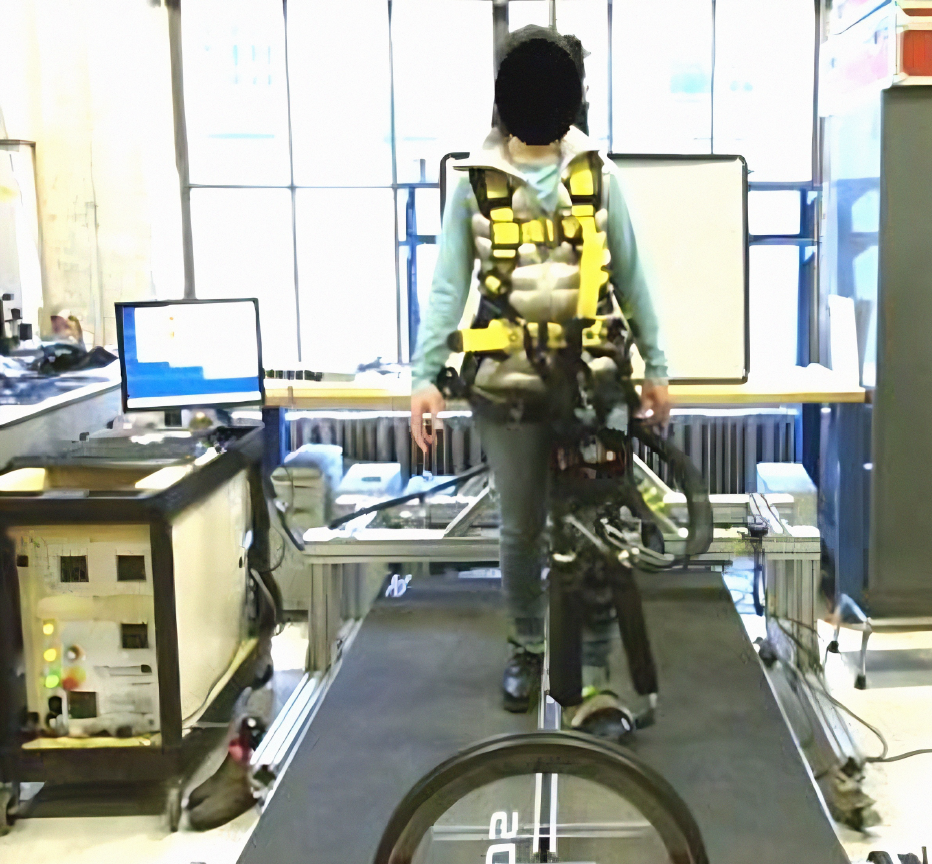
6.3. Prototype and Testing
6.4. Final Remarks
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Espuela, F.L.; Cuenca, J.P.; Díaz, C.L.; Sánchez, J.P.; Gamez-Leyva, G.; Naranjo, I.C. Sex differences in long-term quality of life after stroke: Influence of mood and functional status. Neurología 2020, 35, 470–478. [Google Scholar] [CrossRef]
- Grimmer, M.; Riener, R.; Walsh, C.J.; Seyfarth, A. Mobility related physical and functional losses due to aging and disease—A motivation for lower limb exoskeletons. J. Neuroeng. Rehabil. 2019, 16, 2. [Google Scholar] [CrossRef] [PubMed]
- United Nations, Department of Economic Affairs, and Social DIvision. World Population Ageing, 2019: Highlights, UN. 2019. Available online: https://digitallibrary.un.org/record/3846855 (accessed on 20 April 2023).
- Cieza, A.; Causey, K.; Kamenov, K.; Hanson, S.W.; Chatterji, S.; Vos, T. Global estimates of the need for rehabilitation based on the Global Burden of Disease study 2019: A systematic analysis for the Global Burden of Disease Study 2019. Lancet 2020, 396, 2006–2017. [Google Scholar] [CrossRef] [PubMed]
- Harkema, S.J.; Behrman, A.L.; Barbeau, H. Evidence for Locomotor Training. In Locomotor Training; Oxford University Press: New York, NY, USA, 2011; pp. 21–39. [Google Scholar] [CrossRef]
- Mehrholz, J.; Thomas, S.; Kugler, J.; Pohl, M.; Elsner, B. Electromechanical-assisted training for walking after stroke. Cochrane Database Syst. Rev. 2020, 2020, CD006185. [Google Scholar] [CrossRef]
- Schindel, D.; Schneider, A.; Grittner, U.; Jöbges, M.; Schenk, L. Quality of life after stroke rehabilitation discharge: A 12-month longitudinal study. Disabil. Rehabil. 2021, 43, 2332–2341. [Google Scholar] [CrossRef]
- Morrison, S.A.; Backus, D. Locomotor Training: Is Translating Evidence into Practice Financially Feasible? J. Neurol. Phys. Ther. 2007, 31, 50–54. [Google Scholar] [CrossRef] [PubMed]
- Pinto, D.; Heinemann, A.W.; Chang, S.-H.; Charlifue, S.; Field-Fote, E.C.; Furbish, C.L.; Jayaraman, A.; Tefertiller, C.; Taylor, H.B.; French, D.D. Cost-effectiveness analysis of overground robotic training versus conventional locomotor training in people with spinal cord injury. J. Neuroeng. Rehabil. 2023, 20, 10. [Google Scholar] [CrossRef]
- Calabrò, R.S.; Müller-Eising, C.; Diliberti, M.L.; Manuli, A.; Parrinello, F.; Rao, G.; Barone, V.; Civello, T. Who Will Pay for Robotic Rehabilitation? The Growing Need for a Cost-effectiveness Analysis. Innov. Clin. Neurosci. 2020, 17, 14–16. Available online: http://www.ncbi.nlm.nih.gov/pubmed/33898096 (accessed on 12 May 2023).
- Spiess, M.R.; Steenbrink, F.; Esquenazi, A. Getting the Best Out of Advanced Rehabilitation Technology for the Lower Limbs: Minding Motor Learning Principles. PM&R 2018, 10, S165–S173. [Google Scholar] [CrossRef]
- Xiong, H.; Diao, X. A review of cable-driven rehabilitation devices. Disabil. Rehabil. Assist. Technol. 2020, 15, 885–897. [Google Scholar] [CrossRef]
- Chaparro-Cárdenas, S.L.; Lozano-Guzmán, A.A.; Ramirez-Bautista, J.A.; Hernández-Zavala, A. A review in gait rehabilitation devices and applied control techniques. Disabil. Rehabil. Assist. Technol. 2018, 13, 819–834. [Google Scholar] [CrossRef] [PubMed]
- Mikolajczyk, T.; Ciobanu, I.; Badea, D.I.; Iliescu, A.; Pizzamiglio, S.; Schauer, T.; Seel, T.; Seiciu, P.L.; Turner, D.L.; Berteanu, M. Advanced technology for gait rehabilitation: An overview. Adv. Mech. Eng. 2018, 10, 168781401878362. [Google Scholar] [CrossRef]
- de Miguel-Fernández, J.; Lobo-Prat, J.; Prinsen, E.; Font-Llagunes, J.M.; Marchal-Crespo, L. Control strategies used in lower limb exoskeletons for gait rehabilitation after brain injury: A systematic review and analysis of clinical effectiveness. J. Neuroeng. Rehabil. 2023, 20, 23. [Google Scholar] [CrossRef] [PubMed]
- Slucock, T. A Systematic Review of Low-Cost Actuator Implementations for Lower-Limb Exoskeletons: A Technical and Financial Perspective. J. Intell. Robot. Syst. 2022, 106, 3. [Google Scholar] [CrossRef] [PubMed]
- Pinheiro, C.; Figueiredo, J.; Cerqueira, J.; Santos, C.P. Santos. Robotic Biofeedback for Post-Stroke Gait Rehabilitation: A Scoping Review. Sensors 2022, 22, 7197. [Google Scholar] [CrossRef]
- Gonçalves, R.S.; Rodrigues, L.A.O. Development of a Novel Parallel Structure for Gait Rehabilitation; IGI Global: Hershey, PA, USA, 2020; pp. 42–81. [Google Scholar] [CrossRef]
- Rodrigues, L.A.O.; Gonçalves, R.S. Development of a novel body weight support system for gait rehabilitation. Robotica 2023, 41, 1275–1294. [Google Scholar] [CrossRef]
- de Paiva, T.S.; Gonçalves, R.S.; Carbone, G.; Ceccarelli, M. Gait devices for stroke rehabilitation: State-of-the-art, challenges, and open issues. In Medical and Healthcare Robotics; Elsevier: Amsterdam, The Netherlands, 2023; pp. 87–122. [Google Scholar] [CrossRef]
- Calabrò, R.S.; Cacciola, A.; Bertè, F.; Manuli, A.; Leo, A.; Bramanti, A.; Naro, A.; Milardi, D.; Bramanti, P. Robotic gait rehabilitation and substitution devices in neurological disorders: Where are we now? Neurol. Sci. 2016, 37, 503–514. [Google Scholar] [CrossRef]
- Frey, M.; Colombo, G.; Vaglio, M.; Bucher, R.; Jorg, M.; Riener, R. A Novel Mechatronic Body Weight Support System. IEEE Trans. Neural Syst. Rehabil. Eng. 2006, 14, 311–321. [Google Scholar] [CrossRef]
- Di Tommaso, F.; Tamburella, F.; Lorusso, M.; Gastaldi, L.; Molinari, M.; Tagliamonte, N.L. Biomechanics of Exoskeleton-Assisted Treadmill Walking. In Proceedings of the 2023 International Conference on Rehabilitation Robotics (ICORR), Singapore, 24–28 September 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Marchal-Crespo, L.; Reinkensmeyer, D.J. Review of control strategies for robotic movement training after neurologic injury. J. Neuroeng. Rehabil. 2009, 6, 20. [Google Scholar] [CrossRef]
- Michaud, B.; Cherni, Y.; Begon, M.; Girardin-Vignola, G.; Roussel, P. A serious game for gait rehabilitation with the Lokomat. In Proceedings of the 2017 International Conference on Virtual Rehabilitation (ICVR), Montreal, QC, Canada, 19–22 June 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–2. [Google Scholar] [CrossRef]
- Lunenburger, L.; Colombo, G.; Riener, R.; Dietz, V. Biofeedback in gait training with the robotic orthosis Lokomat. In Proceedings of the 26th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, San Francisco, CA, USA, 1–5 September 2004; IEEE: Piscataway, NJ, USA, 2004; pp. 4888–4891. [Google Scholar] [CrossRef]
- Technical Data Sheet-Hocoma. Available online: https://www.hocoma.com/solutions/lokomat/techincal-data-sheet/ (accessed on 18 May 2023).
- Schmidt, H.; Werner, C.; Bernhardt, R.; Hesse, S.; Krüger, J. Gait rehabilitation machines based on programmable footplates. J. Neuroeng. Rehabil. 2007, 4, 2. [Google Scholar] [CrossRef]
- Hesse, S.; Uhlenbrock, D.; Werner, C.; Bardeleben, A. A mechanized gait trainer for restoring gait in nonambulatory subjects. Arch. Phys. Med. Rehabil. 2000, 81, 1158–1161. [Google Scholar] [CrossRef] [PubMed]
- Marchal-Crespo, L.; Riener, R. Robot-assisted gait training. In Rehabilitation Robotics; Elsevier: Amsterdam, The Netherlands, 2018; pp. 227–240. [Google Scholar] [CrossRef]
- Reha-Stim Medtec Inc. Gait Trainer GT II—Developed for Clinical Use by Practitioners. 2021. Available online: https://www.reha-stim.com (accessed on 20 June 2023).
- Sirlantzis, K.; Larsen, L.B.; Kanumuru, L.K.; Oprea, P. Robotics. In Handbook of Electronic Assistive Technology; Elsevier: Amsterdam, The Netherlands, 2019; pp. 311–345. [Google Scholar] [CrossRef]
- FDA. 510(k) Premarket Notification K143690 for EksoTM. 2016. Available online: https://www.accessdata.fda.gov/scripts/cdrh/cfdocs/cfpmn/pmn.cfm?ID=K143690 (accessed on 14 May 2023).
- Burns, F.; Calder, A.; Devan, H. Experiences of individuals with multiple sclerosis and stroke using transcutaneous foot drop electrical stimulators: A systematic review and meta-synthesis of qualitative studies. Disabil. Rehabil. 2023, 45, 1923–1932. [Google Scholar] [CrossRef] [PubMed]
- Roy, A.; Krebs, H.I.; Iqbal, K.; Macko, N.R.; Macko, R.F.; Forrester, L.W. Robot-Aided Neurorehabilitation: A Novel Robot for Ankle Rehabilitation. IEEE Trans. Robot. 2009, 25, 569–582. [Google Scholar] [CrossRef]
- Roy, A.; Krebs, H.I.; Iqbal, K.; Macko, N.R.; Macko, R.F.; Forrester, L.W. Facilitating push-off propulsion: A biomechanical model of ankle robotics assistance for plantarflexion gait training in stroke. In Proceedings of the 5th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics, Sao Paulo, Brazil, 12–15 August 2014; IEEE: Piscataway, NJ, USA; pp. 656–663. [Google Scholar] [CrossRef]
- AAlamdari, A.; Krovi, V. Robotic Physical Exercise and System (ROPES): A Cable-Driven Robotic Rehabilitation System for Lower-Extremity Motor Therapy. In Proceedings of the Volume 5A: 39th Mechanisms and Robotics Conference, Boston, MA, USA, 2–5 August 2015; American Society of Mechanical Engineers: Boston, MA, USA, 2015. [Google Scholar] [CrossRef]
- Alamdari, A.; Krovi, V. Cable-Driven Articulated Rehabilitation System for Gait Training; University at Buffalo: Buffalo, NY, USA, 2016. [Google Scholar]
- Erbil, D.; Tugba, G.; Murat, T.H.; Melike, A.; Merve, A.; Mehmetali, Ç.C.; Akay, Ö.; Nigar, D. Effects of robot-assisted gait training in chronic stroke patients treated by botulinum toxin-a: A pivotal study. Physiother. Res. Int. 2018, 23, e1718. [Google Scholar] [CrossRef] [PubMed]
- Ertop, T.E.; Yuksel, T.; Konukseven, E.I. Realization of human gait in virtual fluid environment on a robotic gait trainer for therapeutic purposes. Rob. Auton. Syst. 2018, 105, 59–68. [Google Scholar] [CrossRef]
- Swank, C.; Wang-Price, S.; Gao, F.; Almutairi, S. Walking with a Robotic Exoskeleton Does Not Mimic Natural Gait: A Within-Subjects Study. JMIR Rehabil. Assist. Technol. 2019, 6, e11023. [Google Scholar] [CrossRef] [PubMed]
- Sankai, Y. HAL: Hybrid Assistive Limb Based on Cybernics. In Robotics Research. Springer Tracts in Advanced Robotics; Kaneko, M., Nakamura, Y., Eds.; Springer: Berlin/Heidelberg, Germany, 2010; Volume 66, pp. 25–34. [Google Scholar] [CrossRef]
- US Food and Drug Administration. 510(k) Summary of HAL for Medical Use (Lower Limb Type). 2020; pp. 1–18. Available online: https://www.accessdata.fda.gov/scripts/cdrh/cfdocs/cfpmn/pmn.cfm?ID=K201559 (accessed on 17 February 2023).
- Hesse, S.; Uhlenbrock, D. A mechanized gait trainer for restoration of gait. J. Rehabil. Res. Dev. 2000, 37, 701–708. [Google Scholar]
- Reha Stim Medtec, A.G. DataSheet Gait Trainer GTII; Reha Stim Medtec AG: Schlieren, Switzerland; pp. 1–2.
- Hadj-Abdelkader, M.A.; Bourhis, G.; Cherki, B. Haptic feedback control of a smart wheelchair. Appl. Bionics Biomech. 2012, 9, 181–192. [Google Scholar] [CrossRef]
- Reha Technology, A.G. G-EOL–Robotic-Assisted Gait Therapy–Reha Technology. Available online: https://www.rehatechnology.com/en/g-eol/ (accessed on 17 February 2023).
- Ko, B.-W.; Song, W.-K. Kinematic Comparison of Gait Rehabilitation with Exoskeleton and End-Effector Devices. In Biosystems and Biorobotics; Springer International Publishing: Cham, Switzerland, 2017; Volume 16, pp. 213–217. [Google Scholar] [CrossRef]
- Hidayah, R.; Bishop, L.; Jin, X.; Chamarthy, S.; Stein, J.; Agrawal, S.K. Agrawal. Gait Adaptation Using a Cable-Driven Active Leg Exoskeleton (C-ALEX) With Post-Stroke Participants. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 1984–1993. [Google Scholar] [CrossRef]
- Jin, X.; Cui, X.; Agrawal, S.K. Design of a cable-driven active leg exoskeleton (C-ALEX) and gait training experiments with human subjects. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 5578–5583. [Google Scholar] [CrossRef]
- Jin, X.; Cai, Y.; Prado, A.; Agrawal, S.K. Effects of exoskeleton weight and inertia on human walking. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1772–1777. [Google Scholar] [CrossRef]
- Alamdari, A.; Krovi, V. Design and Analysis of a Cable-Driven Articulated Rehabilitation System for Gait Training. J. Mech. Robot. 2016, 8, 5. [Google Scholar] [CrossRef]
- Wu, M.; Hornby, T.G.; Landry, J.M.; Roth, H.; Schmit, B.D. A cable-driven locomotor training system for restoration of gait in human SCI. Gait Posture 2011, 33, 256–260. [Google Scholar] [CrossRef] [PubMed]
- Page, M.J.; McKenzie, J.E.; Bossuyt, P.M.; Boutron, I.; Hoffmann, T.C.; Mulrow, C.D. The PRISMA 2020 statement: An updated guideline for reporting systematic reviews. BMJ 2021, 372, n71. [Google Scholar] [CrossRef] [PubMed]
- Gonçalves, R.S.; Soares, G.; Carvalho, J.C. Conceptual design of a rehabilitation device based on cam-follower and crank-rocker mechanisms hand actioned. J. Braz. Soc. Mech. Sci. Eng. 2019, 41, 277. [Google Scholar] [CrossRef]
- Gonçalves, R.S.; Rodrigues, L.A.O. Development of nonmotorized mechanisms for lower limb rehabilitation. Robotica 2022, 40, 102–119. [Google Scholar] [CrossRef]
- Gonçalves, R.S.; Rodrigues, L.A.O.; Humbert, R.; Carbone, G. A User-Friendly Nonmotorized Device for Ankle Rehabilitation. Robotics 2023, 12, 32. [Google Scholar] [CrossRef]
- Takeuchi, N.; Izumi, S.-I. Rehabilitation with Poststroke Motor Recovery: A Review with a Focus on Neural Plasticity. Stroke Res. Treat. 2013, 2013, 1–13. [Google Scholar] [CrossRef] [PubMed]
- Ingemanson, M.L.; Rowe, J.R.; Chan, V.; Wolbrecht, E.T.; Reinkensmeyer, D.J.; Cramer, S.C. Somatosensory system integrity explains differences in treatment response after stroke. Neurology 2019, 92, e1098–e1108. [Google Scholar] [CrossRef]
- Park, S.-W.; Wolf, S.L.; Blanton, S.; Winstein, C.; Nichols-Larsen, D.S. The EXCITE Trial: Predicting a Clinically Meaningful Motor Activity Log Outcome. Neurorehabilit. Neural Repair 2008, 22, 486–493. [Google Scholar] [CrossRef]
- Taborri, J.; Mileti, I.; Mariani, G.; Mattioli, L.; Liguori, L.; Salvatori, S.; Palermo, E.; Patanè, F.; Rossi, S. RANK-Robotic Ankle: Design and testing on irregular terrains. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 9752–9757. [Google Scholar] [CrossRef]
- Lee, J.; Li, L.; Shin, S.Y.; Deshpande, A.D.; Sulzer, J. Kinematic comparison of single degree-of-freedom robotic gait trainers. Mech. Mach. Theory 2021, 159, 104258. [Google Scholar] [CrossRef]
- Kora, K.; Stinear, J.; McDaid, A. Design, Analysis, and Optimization of an Acute Stroke Gait Rehabilitation Device. J. Med. Devices 2017, 11, 1. [Google Scholar] [CrossRef]
- Ji, Z.; Manna, Y. Synthesis of a Pattern Generation Mechanism for Gait Rehabilitation. J. Med. Devices 2008, 2, 3. [Google Scholar] [CrossRef]
- Yu, J.; Han, S.M.; Kim, Y.Y. Simultaneous Shape and Topology Optimization of Planar Linkage Mechanisms Based on the Spring-Connected Rigid Block Model. J. Mech. Des. 2020, 142, 1. [Google Scholar] [CrossRef]
- Yun, Y.; Kim, H.-C.; Shin, S.Y.; Lee, J.; Deshpande, A.D.; Kim, C. Statistical method for prediction of gait kinematics with Gaussian process regression. J. Biomech. 2014, 47, 186–192. [Google Scholar] [CrossRef] [PubMed]
- Yu, C.; Yao, K.; Zong, Y.; Ye, J.; Chen, J. Rigid-Body Guidance Synthesis of Noncircular Gear-Five-Bar Mechanisms and Its Application in a Knee Joint Rehabilitation Device. Machines 2022, 10, 1110. [Google Scholar] [CrossRef]
- Geonea, I.; Tarnita, D.; Carbone, G.; Ceccarelli, M. Design and Simulation of a Leg Exoskeleton Linkage for Human Motion Assistance. In New Trends in Medical and Service Robotics. Mechanisms and Machine Science; Carbone, G., Ceccarelli, M., Pisla, D., Eds.; Springer: Cham, Switzerland, 2019; Volume 65, pp. 93–100. [Google Scholar] [CrossRef]
- Tsuge, B.Y.; McCarthy, J.M. An Adjustable Single Degree-of-Freedom System to Guide Natural Walking Movement for Rehabilitation. J. Med. Devices 2016, 10, 4. [Google Scholar] [CrossRef]
- Tsuge, B.Y.; Plecnik, M.M.; McCarthy, J.M. Homotopy Directed Optimization to Design a Six-Bar Linkage for a Lower Limb with a Natural Ankle Trajectory. J. Mech. Robot. 2016, 8, 6. [Google Scholar] [CrossRef]
- Tsuge, B.Y. Kinematic Synthesis of Lower Limb Supporting Linkages; University of California, Irvine: Irvine, CA, USA, 2015. [Google Scholar]
- Li, M.; Yan, J.; Zhao, H.; Ma, G.; Li, Y. Mechanically Assisted Neurorehabilitation: A Novel Six-Bar Linkage Mechanism for Gait Rehabilitation. IEEE Trans. Neural Syst. Rehabil. Eng. 2021, 29, 985–992. [Google Scholar] [CrossRef]
- Loya, A.; Deshpande, S.; Purwar, A. Machine Learning-Driven Individualized Gait Rehabilitation: Classification, Prediction, and Mechanism Design. Eng. Sci. Med Diagn. Ther. 2020, 3, 2. [Google Scholar] [CrossRef]
- Serrao, M.; Chini, G.; Bergantino, M.; Sarnari, D.; Casali, C.; Conte, C.; Ranavolo, A.; Marcotulli, C.; Rinaldi, M.; Coppola, G.; et al. Dataset on gait patterns in degenerative neurological diseases. Data Brief 2018, 16, 806–816. [Google Scholar] [CrossRef]
- Kapsalyamov, A.; Hussain, S.; Brown, N.A.; Goecke, R.; Hayat, M.; Jamwal, P.K. Jamwal. Synthesis of a six-bar mechanism for generating knee and ankle motion trajectories using deep generative neural network. Eng. Appl. Artif. Intell. 2023, 117, 105500. [Google Scholar] [CrossRef]
- Winter, D.A. Biomechanics and Motor Control of Human Movement, 4th ed.; John Wiley and Sons: Hoboken, NJ, USA, 2009. [Google Scholar] [CrossRef]
- Shao, Y.; Xiang, Z.; Liu, H.; Li, L. Conceptual design and dimensional synthesis of cam-linkage mechanisms for gait rehabilitation. Mech. Mach. Theory 2016, 104, 31–42. [Google Scholar] [CrossRef]
- Onen, U.; Botsali, F.M.; Kalyoncu, M.; Tinkir, M.; Yilmaz, N.; Sahin, Y. Design and Actuator Selection of a Lower Extremity Exoskeleton. IEEE/ASME Trans. Mechatron. 2014, 19, 623–632. [Google Scholar] [CrossRef]
- Haghjoo, M.R.; Lee, H.; Afzal, M.R.; Eizad, A.; Yoon, J. Mech-Walker:A Novel Single-DOF Linkage Device With Movable Frame for Gait Rehabilitation. IEEE/ASME Trans. Mechatron. 2021, 26, 13–23. [Google Scholar] [CrossRef]
- Shin, S.Y.; Deshpande, A.D.; Sulzer, J. Design of a Single Degree-of-Freedom, Adaptable Electromechanical Gait Trainer for People with Neurological Injury. Mech. Robot. 2018, 10, 4. [Google Scholar] [CrossRef]
- Liu, J.; He, Y.; Yang, J.; Cao, W.; Wu, X. Design and analysis of a novel 12-DOF self-balancing lower extremity exoskeleton for walking assistance. Mech. Mach. Theory 2022, 167, 104519. [Google Scholar] [CrossRef]
- Bovi, G.; Rabuffetti, M.; Mazzoleni, P.; Ferrarin, M. A multiple-task gait analysis approach: Kinematic, kinetic and EMG reference data for healthy young and adult subjects. Gait Posture 2011, 33, 6–13. [Google Scholar] [CrossRef] [PubMed]
- Abbasnejad, G.; Yoon, J.; Lee, H. Optimum kinematic design of a planar cable-driven parallel robot with wrench-closure gait trajectory. Mech. Mach. Theory 2016, 99, 1–18. [Google Scholar] [CrossRef]
- King, S.L.; Barton, G.J.; Ranganath, L.R. Interpreting sources of variation in clinical gait analysis: A case study. Gait Posture 2017, 52, 1–4. [Google Scholar] [CrossRef]
- Washabaugh, E.P.; Shanmugam, T.A.; Ranganathan, R.; Krishnan, C. Comparing the accuracy of open-source pose estimation methods for measuring gait kinematics. Gait Posture 2022, 97, 188–195. [Google Scholar] [CrossRef]
- Fukuchi, C.A.; Fukuchi, R.K.; Duarte, M. A public dataset of overground and treadmill walking kinematics and kinetics in healthy individuals. PeerJ 2018, 2018, e4640. [Google Scholar] [CrossRef]
- Torres-Moreno, J.; Cruz, N.; Álvarez, J.; Redondo, J.; Giménez-Fernandez, A. An open-source tool for path synthesis of four-bar mechanisms. Mech. Mach. Theory 2022, 169, 104604. [Google Scholar] [CrossRef]
- Di Marco, R.; Scalona, E.; Pacilli, A.; Cappa, P.; Mazzà, C.; Rossi, S. How to choose and interpret similarity indices to quantify the variability in gait joint kinematics. Int. Biomech. 2018, 5, 1–8. [Google Scholar] [CrossRef]
- van Hedel, H.J.A.; Schuler, T.A.; Lieber, J. Clinical Application of Rehabilitation Therapy Technologies to Children with CNS Damage. In Neurorehabilitation Technology; Reinkensmeyer, D.J., Marchal-Crespo, L., Dietz, V., Eds.; Springer International Publishing: Cham, Switzerland, 2022; pp. 289–318. [Google Scholar] [CrossRef]
- Krakauer, J.W.; Hadjiosif, A.M.; Xu, J.; Wong, A.L.; Haith, A.M. Motor Learning. Compr. Physiol. 2019, 9, 613–663. [Google Scholar] [CrossRef] [PubMed]
- Bastian, A.J. Understanding sensorimotor adaptation and learning for rehabilitation. Curr. Opin. Neurol. 2008, 21, 628–633. [Google Scholar] [CrossRef] [PubMed]
- Leardini, A.; Sawacha, Z.; Paolini, G.; Ingrosso, S.; Nativo, R.; Benedetti, M.G. A new anatomically based protocol for gait analysis in children. Gait Posture 2007, 26, 560–571. [Google Scholar] [CrossRef] [PubMed]
- Torres-Oviedo, G.; Bastian, A.J. Natural error patterns enable transfer of motor learning to novel contexts. J. Neurophysiol. 2012, 107, 346–356. [Google Scholar] [CrossRef]
- Iosa, M.; Cereatti, A.; Merlo, A.; Campanini, I.; Paolucci, S.; Cappozzo, A. Assessment of Waveform Similarity in Clinical Gait Data: The Linear Fit Method. Biomed. Res. Int. 2014, 2014, 1–7. [Google Scholar] [CrossRef]
- Plecnik, M.M.; McCarthy, J.M. Design of Stephenson linkages that guide a point along a specified trajectory. Mech. Mach. Theory 2016, 96, 38–51. [Google Scholar] [CrossRef]
- McCarthy, J.M.; Soh, G.S. Geometric Design of Linkages; Springer Science+Business Media, LLC.: New York, NY, USA, 2011; p. 448. [Google Scholar]
- Plecnik, M.M.; McCarthy, J.M. Kinematic synthesis of Stephenson III six-bar function generators. Mech. Mach. Theory 2016, 97, 112–126. [Google Scholar] [CrossRef]
- Cabrera, J.; Ortiz, A.; Nadal, F.; Castillo, J. An evolutionary algorithm for path synthesis of mechanisms. Mech. Mach. Theory 2011, 46, 127–141. [Google Scholar] [CrossRef]
- Ben Hamida, I.; Laribi, M.A.; Mlika, A.; Romdhane, L.; Zeghloul, S.; Carbone, G. Multi-Objective optimal design of a cable driven parallel robot for rehabilitation tasks. Mech. Mach. Theory 2021, 156, 104141. [Google Scholar] [CrossRef]
- Soong, R.-C.; Chang, S.-B. Synthesis of function-generation mechanisms using variable length driving links. Mech. Mach. Theory 2011, 46, 1696–1706. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device | Type 1 | Joints | Range of Motion (ROM) | Planes of Motion | Body Weight Support | Gait Surface 2 | Max Speed |
|---|---|---|---|---|---|---|---|
| Lokomat [20,27] | E | Torso Hip Knee Ankle | ±4 cm/±4° Adjustable Adjustable Passive | Sagittal Frontal Transverse | Harness | TM | 3.2 km/h |
| Robogait [39,40] | E | Hip Knee Ankle | Adjustable Adjustable Passive | Sagittal | Harness | TM | 3.2 km/h |
| Ekso [33,41] | M | Hip Knee Ankle | +135°/−20° +130°/0° +10°/−10° | Sagittal Transverse | Crutch Cain Walker | OG | 3.5 km/h |
| HAL [42,43] | M | Hip Knee | 120°/−20° 120°/−6° | Sagittal | Not included | FS (indoor) | Not specified |
| Gait Trainer GT I [44] | EE | CoM (vert/horiz.) Ankle | 1 cm/2 cm Adjustable (gears) | Sagittal | Harness | FPs | 140 steps/min |
| Gait Trainer GT II [44,45] | EE | Ankle | Step length: 34–48 cm | Sagittal | Harness | FPs | 2 km/h |
| Haptic Walker [46] | EE | Ankle | Adjustable | Sagittal | Harness | FPs | 5 km/h |
| G-EO System [47,48] | EE | Ankle | Step length: max 55 cm Step height: 10–20 cm | Sagittal | Harness | FPs | 2.3 km/h |
| Anklebot [35,36] | AJA | Ankle | DF/PF: 25°/45° IV/EV: 25°/20° IR/ER: 15°/15° | All | Not included | TM OG | Not specified |
| C-ALEX [49,50,51] | CD | Hip Knee | +43.8° ± 7.4°/−11.6° ± 1.8° 84.3° ± 7.6°/0° | Sagittal | Not included | TM | 1.6 km/h 3 |
| ROPES [37,52] | CD | Hip Knee Ankle | Adjustable Adjustable Adjustable | Sagittal | Harness | TM | 5.4 km/h 3 |
| CaLT [53] | CD | Knee | Adjustable | Sagittal | Harness | TM | 5.4 km/h 3 |
| Four-Bar Linkage | Synthesis/Optimization | Accuracy Measure | Gait Baseline |
|---|---|---|---|
| [62] | Multi-objective | RMS error and Peak error 1 | Dataset [66] |
| [63] | Constrained nonlinear multivariable | RMS error | Normative (scaled) |
| [64] | Nonlinear least squares | Sum of error distances | Biomechanical model |
| [65] | Shape optimization + topology optimization | Error bound | Dataset [66] |
| Linkage Topology | Synthesis/Optimization | Accuracy Measure | Gait Baseline |
|---|---|---|---|
| Five-bar [67] | Kinematic mapping and rigid body guidance | Position Error Angle Error | Experimental |
| Five-bar [68] | Rigid body guidance (not explicit) | Not mentioned | Experimental |
| Six-bar [69,70,71] | Unconstrained optimization | Error Function | Experimental |
| Six-bar [72] | Combined dual particle swarm optimization | Coupler vs. reference: Average distance Maximum distance Sum of distances | Experimental |
| Six-bar [73] | Deep generative models (conditional–variational auto-encoders) | RMSE 1 for gait prediction models | Individual–specific, using gait prediction models trained on a real dataset (KIST dataset) |
| Six-bar [75] | Deep generative neural network | MSE 2 | Normative [76] |
| Linkage Topology | Synthesis/Optimization | Accuracy Measure | Gait Baseline |
|---|---|---|---|
| Seven-bar [77] | Genetic algorithm | Average residuals | Dataset [78] |
| Eight-bar [79] | Global optimization (MultiStart) | Hip and knee angles: Mean Standard deviation | Dataset [82,83] |
| Eight-bar [80] | Interior point method | RMSE | Dataset [66] |
| Spatial linkage [81] | Bio-inspired | Not verified | Not applicable |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Paiva, T.S.d.; Gonçalves, R.S.; Carbone, G. A Critical Review and Systematic Design Approach for Linkage-Based Gait Rehabilitation Devices. Robotics 2024, 13, 11. https://doi.org/10.3390/robotics13010011
Paiva TSd, Gonçalves RS, Carbone G. A Critical Review and Systematic Design Approach for Linkage-Based Gait Rehabilitation Devices. Robotics. 2024; 13(1):11. https://doi.org/10.3390/robotics13010011
Chicago/Turabian StylePaiva, Thiago Sá de, Rogério Sales Gonçalves, and Giuseppe Carbone. 2024. "A Critical Review and Systematic Design Approach for Linkage-Based Gait Rehabilitation Devices" Robotics 13, no. 1: 11. https://doi.org/10.3390/robotics13010011
APA StylePaiva, T. S. d., Gonçalves, R. S., & Carbone, G. (2024). A Critical Review and Systematic Design Approach for Linkage-Based Gait Rehabilitation Devices. Robotics, 13(1), 11. https://doi.org/10.3390/robotics13010011