
MonoGhost: Lightweight Monocular GhostNet 3D Object Properties Estimation for Autonomous Driving


Abstract
:1. Introduction
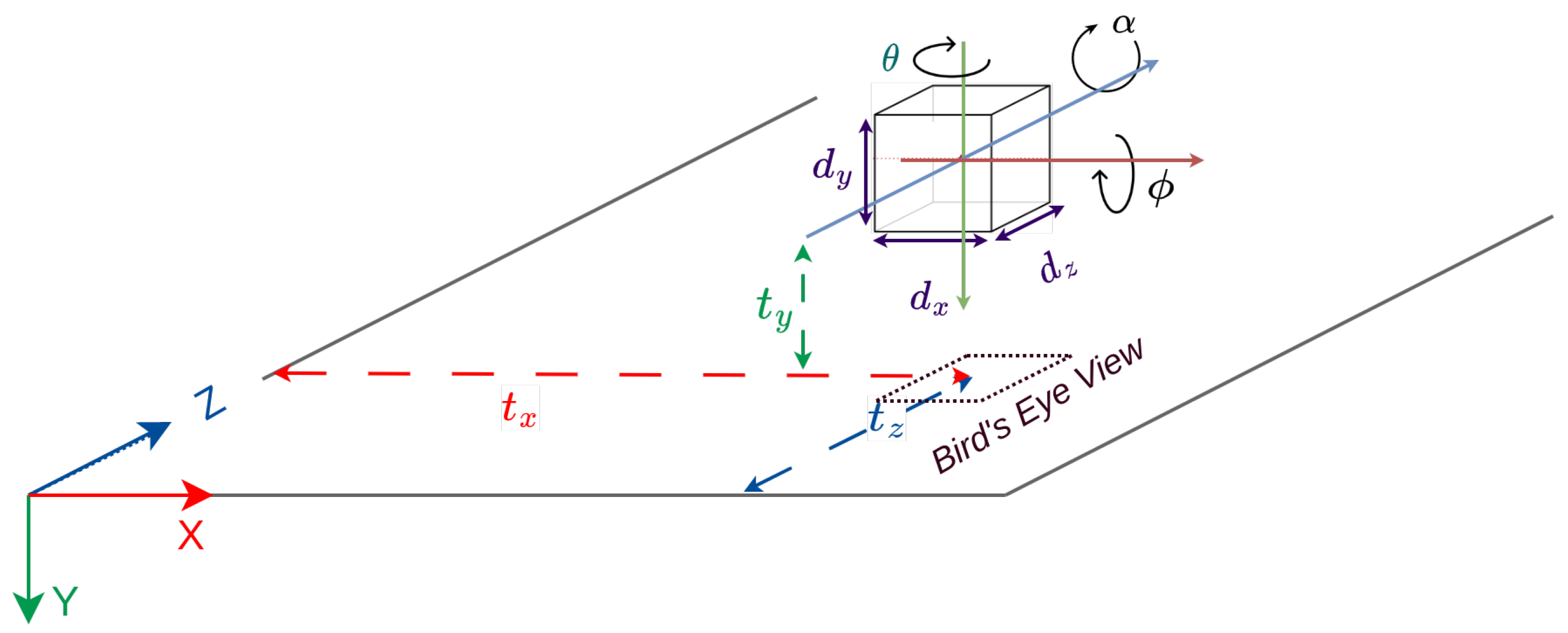
- A deep learning approach for estimating the Bird’s Eye View bounding box of the detected object, depending on encoding the object’s geometric and visual features using 1D convolution then fusing the encoded features to decode the object Bird’s Eye View translation center.
- Preserving the stability of object’s depth prediction for KITTI [22] hard object case without sacrificing the orientation prediction accuracy.
- Simple design of MonoGhost network, which is composed of low computational burden operations.
- Selection of an efficient lightweight, embedded-device-friendly feature extractor.
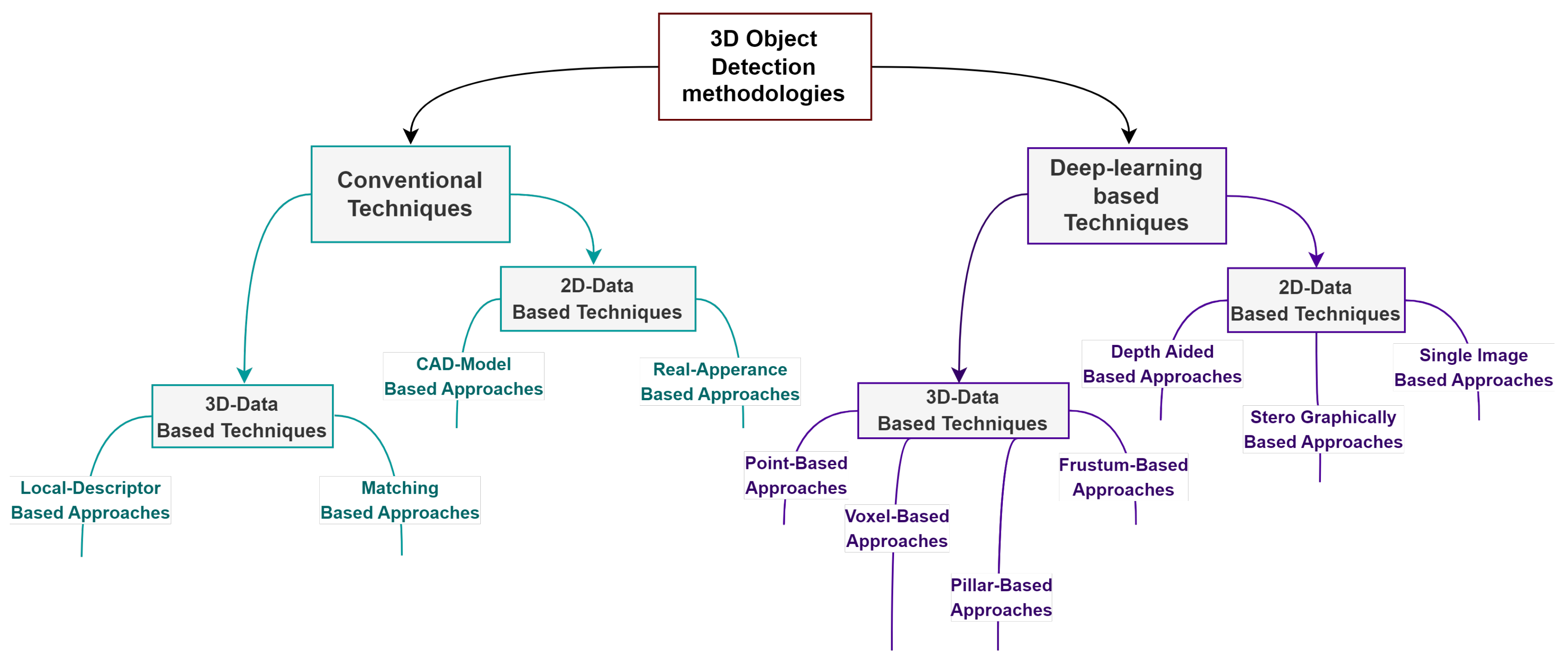
2. Related Work
2.1. Conventional Techniques
2.1.1. 3D-Data-Based Techniques
2.1.2. 2D-Data-Based Techniques
2.2. Deep Learning-Based Techniques
2.2.1. 3D-Data-Based Techniques
2.2.2. 2D-Data-Based Techniques
3. MonoGhost Network
- First stage (Orientation-Dimensions Estimator) accepts the cropped object image as well as the coordinates of the 2D detected bounding box, then extracts object visual features and outputs the object geometric features (orientation and dimensions).
- Second stage (Bird’s Eye View Center Estimator) fuses the object’s visual and geometric features with the 2D bounding box coordinates and the Guiding Depth to estimate the object Bird’s Eye View bounding box center.
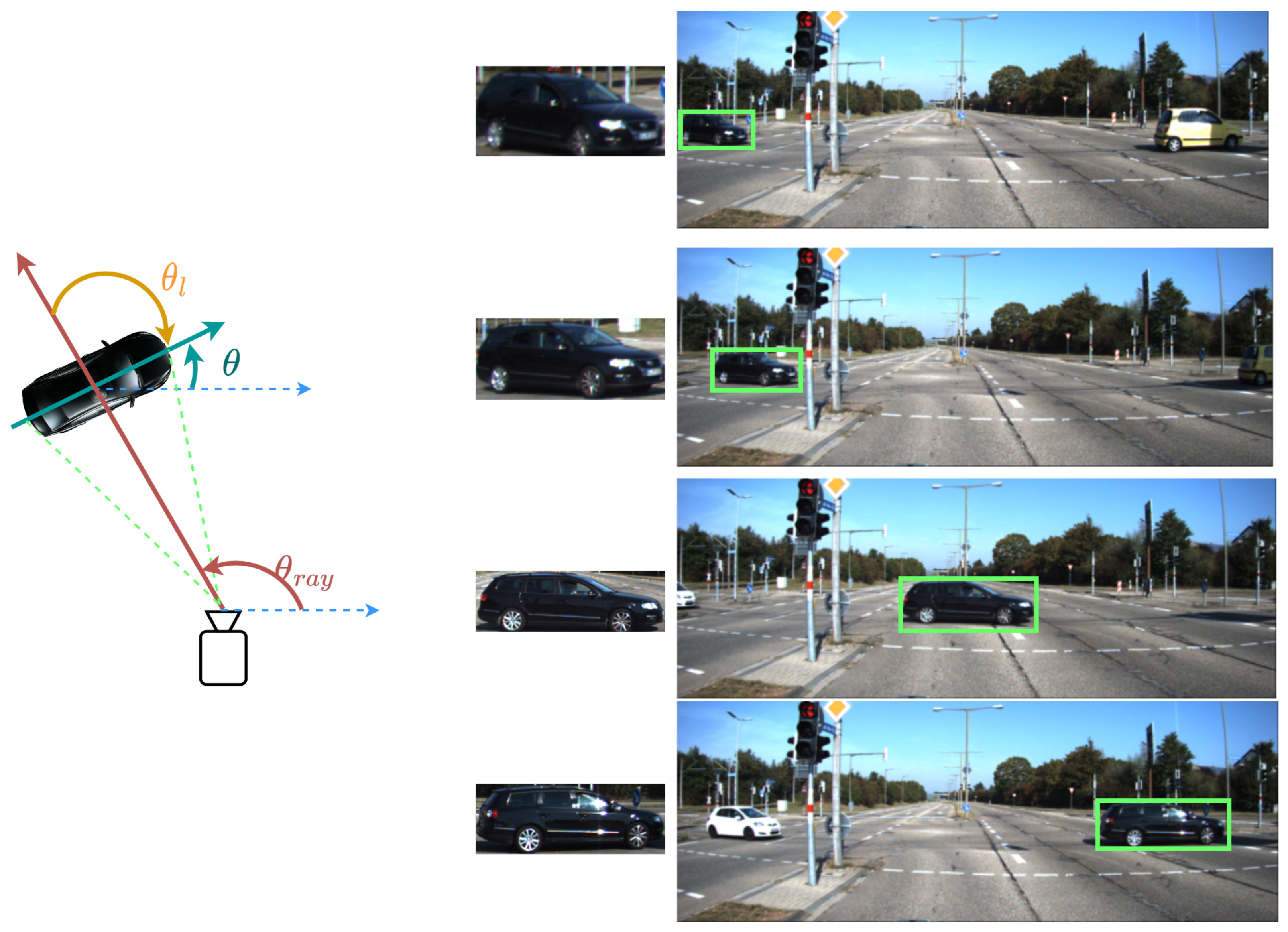
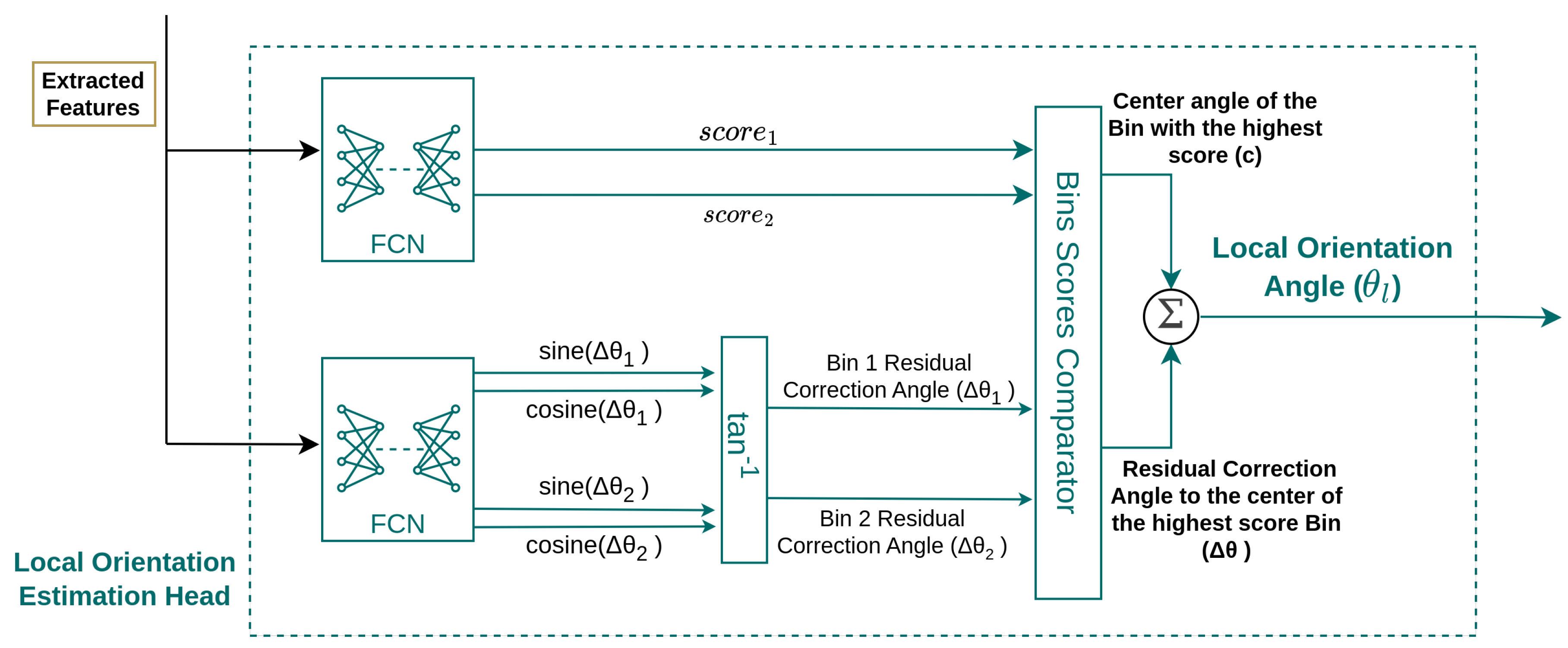
3.1. Orientation Estimation
3.2. Dimensions Estimation
3.3. Bird’s Eye View Bounding Box Center Estimation
3.4. GhostNet as an Off-the-Shelf Lightweight Feature Extractor
4. Experimental Work
4.1. Implementation Details
4.2. Dataset
4.2.1. Data Augmentation
4.2.2. Preprocessing
4.3. Training
4.3.1. Orientation-Dimensions Estimator
4.3.2. Bird’s Eye View Center Estimator
5. Results and Discussion
- Easy: Minimum bounding box height: 40 pixels, Maximum occlusion level: Fully visible, Maximum truncation: 15%.
- Moderate: Minimum bounding box height: 25 pixels, Maximum occlusion level: Partly occluded, Maximum truncation: 30%.
- Hard: Minimum bounding box height: 25 pixels, Maximum occlusion level: Difficult to see, Maximum truncation: 50%.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Crayton, T.J.; Meier, B.M. Autonomous vehicles: Developing a public health research agenda to frame the future of transportation policy. J. Transp. Health 2017, 6, 245–252. [Google Scholar] [CrossRef]
- Yurtsever, E.; Lambert, J.; Carballo, A.; Takeda, K. A Survey of Autonomous Driving: Common Practices and Emerging Technologies. IEEE Access 2020, 8, 58443–58469. [Google Scholar] [CrossRef]
- Shladover, S.E. Review of the state of development of advanced vehicle control systems (AVCS). Veh. Syst. Dyn. 1995, 24, 551–595. [Google Scholar] [CrossRef]
- Vander Werf, J.; Shladover, S.E.; Miller, M.A.; Kourjanskaia, N. Effects of adaptive cruise control systems on highway traffic flow capacity. Transp. Res. Rec. 2002, 1800, 78–84. [Google Scholar] [CrossRef]
- Calvert, S.; Schakel, W.; Van Lint, J. Will automated vehicles negatively impact traffic flow? J. Adv. Transp. 2017, 2017, 3082781. [Google Scholar] [CrossRef]
- Gasser, T.M.; Westhoff, D. BASt-study: Definitions of automation and legal issues in Germany. In Proceedings of the 2012 Road Vehicle Automation Workshop, Irvine, CA, USA, 25 July 2012. [Google Scholar]
- International, S. Taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles. SAE Int. 2018, 4970, 1–5. [Google Scholar]
- Varotto, S.F.; Hoogendoorn, R.G.; van Arem, B.; Hoogendoorn, S.P. Empirical longitudinal driving behavior in authority transitions between adaptive cruise control and manual driving. Transp. Res. Rec. 2015, 2489, 105–114. [Google Scholar] [CrossRef]
- Nassi, D.; Ben-Netanel, R.; Elovici, Y.; Nassi, B. MobilBye: Attacking ADAS with camera spoofing. arXiv 2019, arXiv:1906.09765. [Google Scholar]
- Vivek, K.; Sheta, M.A.; Gumtapure, V. A comparative study of Stanley, LQR and MPC controllers for path tracking application (ADAS/AD). In Proceedings of the 2019 IEEE International Conference on Intelligent Systems and Green Technology (ICISGT), Visakhapatnam, India, 29–30 June 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 67–674. [Google Scholar]
- Gupta, A.; Anpalagan, A.; Guan, L.; Khwaja, A.S. Deep learning for object detection and scene perception in self-driving cars: Survey, challenges, and open issues. Array 2021, 10, 100057. [Google Scholar] [CrossRef]
- Sharma, D. Evaluation and Analysis of Perception Systems for Autonomous Driving. 2020. Available online: https://www.diva-portal.org/smash/record.jsf?pid=diva2%3A1536525&dswid=-9079 (accessed on 5 November 2023).
- Liu, Y.; Yixuan, Y.; Liu, M. Ground-aware monocular 3D object detection for autonomous driving. IEEE Robot. Autom. Lett. 2021, 6, 919–926. [Google Scholar] [CrossRef]
- Li, Z.; Du, Y.; Zhu, M.; Zhou, S.; Zhang, L. A survey of 3D object detection algorithms for intelligent vehicles development. Artif. Life Robot. 2022, 27, 115–122. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.; Wang, Y.; Zhang, S.; Ogai, H. Deep 3D object detection networks using LiDAR data: A review. IEEE Sens. J. 2020, 21, 1152–1171. [Google Scholar] [CrossRef]
- Qian, R.; Lai, X.; Li, X. 3D object detection for autonomous driving: A survey. Pattern Recognit. 2022, 130, 108796. [Google Scholar] [CrossRef]
- Wu, J.; Yin, D.; Chen, J.; Wu, Y.; Si, H.; Lin, K. A survey on monocular 3D object detection algorithms based on deep learning. J. Phys. Conf. Ser. 2020, 1518, 012049. [Google Scholar] [CrossRef]
- Gu, F.; Zhao, H.; Ma, Y.; Bu, P. Camera calibration based on the back projection process. Meas. Sci. Technol. 2015, 26, 125004. [Google Scholar] [CrossRef]
- Wang, C.Y.; Bochkovskiy, A.; Liao, H.Y.M. YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors. arXiv 2022, arXiv:2207.02696. [Google Scholar]
- Abhishek, A.V.S.; Kotni, S. Detectron2 Object Detection & Manipulating Images using Cartoonization. Int. J. Eng. Res. Technol. 2021, 10, 1. [Google Scholar]
- Wang, C.Y.; Yeh, I.H.; Liao, H.Y.M. You only learn one representation: Unified network for multiple tasks. arXiv 2021, arXiv:2105.04206. [Google Scholar]
- Geiger, A.; Lenz, P.; Urtasun, R. Are we ready for autonomous driving? the kitti vision benchmark suite. In Proceedings of the 2012 IEEE Conferencef on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 3354–3361. [Google Scholar]
- Wang, T.; Zhu, X.; Pang, J.; Lin, D. Probabilistic and Geometric Depth: Detecting Objects in Perspective. In Proceedings of the Conference on Robot Learning (CoRL), London, UK, 8 November 2021. [Google Scholar]
- Li, P.; Zhao, H. Monocular 3D detection with geometric constraint embedding and semi-supervised training. IEEE Robot. Autom. Lett. 2021, 6, 5565–5572. [Google Scholar] [CrossRef]
- Liu, Z.; Wu, Z.; Tóth, R. Smoke: Single-stage monocular 3D object detection via keypoint estimation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, Seattle, WA, USA, 13–19 June 2020; pp. 996–997. [Google Scholar]
- Lamdan, Y.; Schwartz, J.T.; Wolfson, H.J. Affine invariant model-based object recognition. IEEE Trans. Robot. Autom. 1990, 6, 578–589. [Google Scholar] [CrossRef]
- Rigoutsos, I.; Hummel, R. Implementation of geometric hashing on the connection machine. In Proceedings of the Workshop on Directions in Automated CAD-Based Vision, Maui, HI, USA, 2–3 June 1991; IEEE Computer Society: Piscataway, NJ, USA, 1991; pp. 76–77. [Google Scholar]
- Rigoutsos, I. Massively Parallel Bayesian Object Recognition; New York University: New York, NY, USA, 1992. [Google Scholar]
- Biegelbauer, G.; Vincze, M.; Wohlkinger, W. Model-based 3D object detection: Efficient approach using superquadrics. Mach. Vis. Appl. 2010, 21, 497–516. [Google Scholar] [CrossRef]
- Bebis, G.; Georgiopoulos, M.; da Vitoria Lobo, N. Learning geometric hashing functions for model-based object recognition. In Proceedings of the IEEE International Conference on Computer Vision, Cambridge, MA, USA, 20–23 June 1995; IEEE: Piscataway, NJ, USA, 1995; pp. 543–548. [Google Scholar]
- He, Z.; Feng, W.; Zhao, X.; Lv, Y. 6D pose estimation of objects: Recent technologies and challenges. Appl. Sci. 2020, 11, 228. [Google Scholar] [CrossRef]
- Wang, K.; Xie, J.; Zhang, G.; Liu, L.; Yang, J. Sequential 3D human pose and shape estimation from point clouds. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020; pp. 7275–7284. [Google Scholar]
- Li, X.; Wang, H.; Yi, L.; Guibas, L.J.; Abbott, A.L.; Song, S. Category-level articulated object pose estimation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 April 2020; pp. 3706–3715. [Google Scholar]
- Zhang, Z.; Hu, L.; Deng, X.; Xia, S. Weakly supervised adversarial learning for 3D human pose estimation from point clouds. IEEE Trans. Vis. Comput. Graph. 2020, 26, 1851–1859. [Google Scholar] [CrossRef] [PubMed]
- Guo, Z.; Chai, Z.; Liu, C.; Xiong, Z. A fast global method combined with local features for 6d object pose estimation. In Proceedings of the 2019 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Hong Kong, China, 8–12 July 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar]
- Chen, Y.; Medioni, G. Object modelling by registration of multiple range images. Image Vis. Comput. 1992, 10, 145–155. [Google Scholar] [CrossRef]
- Yu, H.; Fu, Q.; Yang, Z.; Tan, L.; Sun, W.; Sun, M. Robust robot pose estimation for challenging scenes with an RGB-D camera. IEEE Sens. J. 2018, 19, 2217–2229. [Google Scholar] [CrossRef]
- Rublee, E.; Rabaud, V.; Konolige, K.; Bradski, G. ORB: An efficient alternative to SIFT or SURF. In Proceedings of the 2011 International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 2564–2571. [Google Scholar]
- Calonder, M.; Lepetit, V.; Strecha, C.; Fua, P. Brief: Binary robust independent elementary features. In Proceedings of the Computer Vision—ECCV 2010: 11th European Conference on Computer Vision, Heraklion, Crete, Greece, 5–11 September 2010; Proceedings, Part IV 11. Springer: Berlin/Heidelberg, Germany, 2010; pp. 778–792. [Google Scholar]
- Nospes, D.; Safronov, K.; Gillet, S.; Brillowski, K.; Zimmermann, U.E. Recognition and 6D pose estimation of large-scale objects using 3D semi-global descriptors. In Proceedings of the 2019 16th International Conference on Machine Vision Applications (MVA), Tokyo, Japan, 27–31 May 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar]
- Park, K.; Patten, T.; Prankl, J.; Vincze, M. Multi-task template matching for object detection, segmentation and pose estimation using depth images. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 7207–7213. [Google Scholar]
- Konishi, Y.; Hattori, K.; Hashimoto, M. Real-time 6D object pose estimation on CPU. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 3451–3458. [Google Scholar]
- Tamadazte, B.; Marchand, E.; Dembélé, S.; Le Fort-Piat, N. CAD model-based tracking and 3D visual-based control for MEMS microassembly. Int. J. Robot. Res. 2010, 29, 1416–1434. [Google Scholar] [CrossRef]
- Brachmann, E.; Michel, F.; Krull, A.; Yang, M.Y.; Gumhold, S.; Rother, C. Uncertainty-driven 6d pose estimation of objects and scenes from a single rgb image. In Proceedings of the IEEE Conferencef on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 3364–3372. [Google Scholar]
- Marullo, G.; Tanzi, L.; Piazzolla, P.; Vezzetti, E. 6D object position estimation from 2D images: A literature review. Multimed. Tools Appl. 2022, 82, 24605–24643. [Google Scholar] [CrossRef]
- Bay, H.; Ess, A.; Tuytelaars, T.; Van Gool, L. Speeded-Up Robust Features (SURF). Comput. Vis. Image Underst. 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Miyake, E.; Takubo, T.; Ueno, A. 3D Pose Estimation for the Object with Knowing Color Symbol by Using Correspondence Grouping Algorithm. In Proceedings of the 2020 IEEE/SICE International Symposium on System Integration (SII), Honolulu, HI, USA, 12–15 January 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 960–965. [Google Scholar]
- Zhang, X.; Jiang, Z.; Zhang, H.; Wei, Q. Vision-Based Pose Estimation for Textureless Space Objects by Contour Points Matching. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 2342–2355. [Google Scholar] [CrossRef]
- Konishi, Y.; Hanzawa, Y.; Kawade, M.; Hashimoto, M. Fast 6D pose estimation from a monocular image using hierarchical pose trees. In Proceedings of the Computer Vision—ECCV 2016: 14th European Conference, Amsterdam, The Netherlands, 11–14 October 2016; Proceedings, Part I 14. Springer: Berlin/Heidelberg, Germany, 2016; pp. 398–413. [Google Scholar]
- Lim, J.J.; Khosla, A.; Torralba, A. Fpm: Fine pose parts-based model with 3D cad models. In Proceedings of the Computer Vision—ECCV 2014: 13th European Conference, Zurich, Switzerland, 6–12 September 2014; Proceedings, Part VI 13. Springer: Berlin/Heidelberg, Germany, 2014; pp. 478–493. [Google Scholar]
- Muñoz, E.; Konishi, Y.; Murino, V.; Del Bue, A. Fast 6D pose estimation for texture-less objects from a single RGB image. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 5623–5630. [Google Scholar] [CrossRef]
- Peng, J.; Xu, W.; Liang, B.; Wu, A.G. Virtual stereovision pose measurement of noncooperative space targets for a dual-arm space robot. IEEE Trans. Instrum. Meas. 2019, 69, 76–88. [Google Scholar] [CrossRef]
- Chaumette, F.; Hutchinson, S. Visual servo control. II. Advanced approaches [Tutorial]. IEEE Robot. Autom. Mag. 2007, 14, 109–118. [Google Scholar] [CrossRef]
- Wnuk, M.; Pott, A.; Xu, W.; Lechler, A.; Verl, A. Concept for a simulation-based approach towards automated handling of deformable objects—A bin picking scenario. In Proceedings of the 2017 24th International Conference on Mechatronics and Machine Vision in Practice (M2VIP), Auckland, New Zealand, 21–23 November 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Kratochvil, B.E.; Dong, L.; Nelson, B.J. Real-time rigid-body visual tracking in a scanning electron microscope. Int. J. Robot. Res. 2009, 28, 498–511. [Google Scholar] [CrossRef]
- Guo, J.; Wu, P.; Wang, W. A precision pose measurement technique based on multi-cooperative logo. J. Phys. Conf. Ser. 2020, 1607, 012047. [Google Scholar] [CrossRef]
- Dalal, N.; Triggs, B. Histograms of oriented gradients for human detection. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005; IEEE: Piscataway, NJ, USA, 2005; Volume 1, pp. 886–893. [Google Scholar]
- Hinterstoisser, S.; Cagniart, C.; Ilic, S.; Sturm, P.; Navab, N.; Fua, P.; Lepetit, V. Gradient response maps for real-time detection of textureless objects. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 34, 876–888. [Google Scholar] [CrossRef]
- Solina, F.; Bajcsy, R. Recovery of parametric models from range images: The case for superquadrics with global deformations. IEEE Trans. Pattern Anal. Mach. Intell. 1990, 12, 131–147. [Google Scholar] [CrossRef]
- Roomi, M.; Beham, D. A Review Of Face Recognition Methods. Int. J. Pattern Recognit. Artif. Intell. 2013, 27, 1356005. [Google Scholar] [CrossRef]
- Vishwakarma, V.P.; Pandey, S.; Gupta, M. An illumination invariant accurate face recognition with down scaling of DCT coefficients. J. Comput. Inf. Technol. 2010, 18, 53–67. [Google Scholar] [CrossRef]
- Muñoz, E.; Konishi, Y.; Beltran, C.; Murino, V.; Del Bue, A. Fast 6D pose from a single RGB image using Cascaded Forests Templates. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 4062–4069. [Google Scholar]
- Salganicoff, M.; Ungar, L.H.; Bajcsy, R. Active learning for vision-based robot grasping. Mach. Learn. 1996, 23, 251–278. [Google Scholar] [CrossRef]
- Chevalier, L.; Jaillet, F.; Baskurt, A. Segmentation and Superquadric Modeling of 3D Objects. February 2003. Available online: http://wscg.zcu.cz/wscg2003/Papers_2003/D71.pdf (accessed on 5 November 2023).
- Vilar, C.; Krug, S.; O’Nils, M. Realworld 3D object recognition using a 3D extension of the hog descriptor and a depth camera. Sensors 2021, 21, 910. [Google Scholar] [CrossRef] [PubMed]
- O’Mahony, N.; Campbell, S.; Carvalho, A.; Harapanahalli, S.; Hernandez, G.V.; Krpalkova, L.; Riordan, D.; Walsh, J. Deep learning vs. traditional computer vision. In Proceedings of the Advances in Computer Vision: Proceedings of the 2019 Computer Vision Conference (CVC); Springer: Berlin/Heidelberg, Germany, 2019; Volume 11, pp. 128–144. [Google Scholar]
- Li, J.; Sun, Y.; Luo, S.; Zhu, Z.; Dai, H.; Krylov, A.S.; Ding, Y.; Shao, L. P2V-RCNN: Point to voxel feature learning for 3D object detection from point clouds. IEEE Access 2021, 9, 98249–98260. [Google Scholar] [CrossRef]
- Li, J.; Luo, S.; Zhu, Z.; Dai, H.; Krylov, A.S.; Ding, Y.; Shao, L. 3D IoU-Net: IoU guided 3D object detector for point clouds. arXiv 2020, arXiv:2004.04962. [Google Scholar]
- Shi, S.; Guo, C.; Jiang, L.; Wang, Z.; Shi, J.; Wang, X.; Li, H. Pv-rcnn: Point-voxel feature set abstraction for 3D object detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020; pp. 10529–10538. [Google Scholar]
- Shi, S.; Wang, X.; Li, H. Pointrcnn: 3D object proposal generation and detection from point cloud. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 16–20 June 2019; pp. 770–779. [Google Scholar]
- Mao, J.; Shi, S.; Wang, X.; Li, H. 3D object detection for autonomous driving: A review and new outlooks. arXiv 2022, arXiv:2206.09474. [Google Scholar]
- Fernandes, D.; Silva, A.; Névoa, R.; Simões, C.; Gonzalez, D.; Guevara, M.; Novais, P.; Monteiro, J.; Melo-Pinto, P. Point-cloud based 3D object detection and classification methods for self-driving applications: A survey and taxonomy. Inf. Fusion 2021, 68, 161–191. [Google Scholar] [CrossRef]
- Zhou, Y.; Tuzel, O. Voxelnet: End-to-end learning for point cloud based 3D object detection. In Proceedings of the IEEE Conferencef on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 4490–4499. [Google Scholar]
- Yan, Y.; Mao, Y.; Li, B. Second: Sparsely embedded convolutional detection. Sensors 2018, 18, 3337. [Google Scholar] [CrossRef] [PubMed]
- Zhu, B.; Jiang, Z.; Zhou, X.; Li, Z.; Yu, G. Class-balanced grouping and sampling for point cloud 3D object detection. arXiv 2019, arXiv:1908.09492. [Google Scholar]
- Ge, R.; Ding, Z.; Hu, Y.; Wang, Y.; Chen, S.; Huang, L.; Li, Y. Afdet: Anchor free one stage 3D object detection. arXiv 2020, arXiv:2006.12671. [Google Scholar]
- Yin, T.; Zhou, X.; Krahenbuhl, P. Center-based 3D object detection and tracking. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 19–25 June 2021; pp. 11784–11793. [Google Scholar]
- Li, F.; Jin, W.; Fan, C.; Zou, L.; Chen, Q.; Li, X.; Jiang, H.; Liu, Y. PSANet: Pyramid splitting and aggregation network for 3D object detection in point cloud. Sensors 2020, 21, 136. [Google Scholar] [CrossRef]
- Qi, C.R.; Su, H.; Mo, K.; Guibas, L.J. Pointnet: Deep learning on point sets for 3D classification and segmentation. In Proceedings of the IEEE Conferencef on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 652–660. [Google Scholar]
- Qi, C.R.; Yi, L.; Su, H.; Guibas, L.J. Pointnet++: Deep hierarchical feature learning on point sets in a metric space. Adv. Neural Inf. Process. Syst. 2017, 30, 1, 5, 7. [Google Scholar]
- Zarzar, J.; Giancola, S.; Ghanem, B. PointRGCN: Graph convolution networks for 3D vehicles detection refinement. arXiv 2019, arXiv:1911.12236. [Google Scholar]
- Shin, K.; Kwon, Y.P.; Tomizuka, M. Roarnet: A robust 3D object detection based on region approximation refinement. In Proceedings of the 2019 IEEE Intelligent Vehicles Symposium (IV), Dearborn, MI, USA, 9–12 June 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 2510–2515. [Google Scholar]
- Meyer, G.P.; Laddha, A.; Kee, E.; Vallespi-Gonzalez, C.; Wellington, C.K. Lasernet: An efficient probabilistic 3D object detector for autonomous driving. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 12677–12686. [Google Scholar]
- Vora, S.; Lang, A.H.; Helou, B.; Beijbom, O. Pointpainting: Sequential fusion for 3D object detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 4604–4612. [Google Scholar]
- Lang, A.H.; Vora, S.; Caesar, H.; Zhou, L.; Yang, J.; Beijbom, O. Pointpillars: Fast encoders for object detection from point clouds. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 12697–12705. [Google Scholar]
- Zhao, X.; Liu, Z.; Hu, R.; Huang, K. 3D object detection using scale invariant and feature reweighting networks. In Proceedings of the AAAI Conference on Artificial Intelligence, Hawaii, HI, USA, 27 January–1 February 2019; Volume 33, pp. 9267–9274. [Google Scholar]
- Wang, Z.; Jia, K. Frustum convnet: Sliding frustums to aggregate local point-wise features for amodal 3D object detection. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1742–1749. [Google Scholar]
- Qi, C.R.; Liu, W.; Wu, C.; Su, H.; Guibas, L.J. Frustum pointnets for 3D object detection from rgb-d data. In Proceedings of the IEEE Conferencef on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 918–927. [Google Scholar]
- Rahman, M.M.; Tan, Y.; Xue, J.; Lu, K. Notice of violation of IEEE publication principles: Recent advances in 3D object detection in the era of deep neural networks: A survey. IEEE Trans. Image Process. 2019, 29, 2947–2962. [Google Scholar] [CrossRef]
- Chang, J.R.; Chen, Y.S. Pyramid stereo matching network. In Proceedings of the IEEE Conferencef on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 5410–5418. [Google Scholar]
- Zhang, F.; Prisacariu, V.; Yang, R.; Torr, P.H. Ga-net: Guided aggregation net for end-to-end stereo matching. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 185–194. [Google Scholar]
- Wang, Y.; Lai, Z.; Huang, G.; Wang, B.H.; Van Der Maaten, L.; Campbell, M.; Weinberger, K.Q. Anytime stereo image depth estimation on mobile devices. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 5893–5900. [Google Scholar]
- Guo, X.; Yang, K.; Yang, W.; Wang, X.; Li, H. Group-wise correlation stereo network. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 3273–3282. [Google Scholar]
- Kendall, A.; Martirosyan, H.; Dasgupta, S.; Henry, P.; Kennedy, R.; Bachrach, A.; Bry, A. End-to-end learning of geometry and context for deep stereo regression. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 66–75. [Google Scholar]
- Chen, X.; Kundu, K.; Zhu, Y.; Berneshawi, A.G.; Ma, H.; Fidler, S.; Urtasun, R. 3D object proposals for accurate object class detection. Adv. Neural Inf. Process. Syst. 2015, 28, 1. [Google Scholar]
- Kar, A.; Häne, C.; Malik, J. Learning a multi-view stereo machine. Adv. Neural Inf. Process. Syst. 2017, 30, 2. [Google Scholar]
- Ma, X.; Wang, Z.; Li, H.; Zhang, P.; Ouyang, W.; Fan, X. Accurate monocular 3D object detection via color-embedded 3D reconstruction for autonomous driving. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 6851–6860. [Google Scholar]
- Weng, X.; Kitani, K. Monocular 3D object detection with pseudo-lidar point cloud. In Proceedings of the IEEE/CVF International Conference on Computer Vision Workshops, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 3, 6, 11. [Google Scholar]
- Wang, Y.; Chao, W.L.; Garg, D.; Hariharan, B.; Campbell, M.; Weinberger, K.Q. Pseudo-lidar from visual depth estimation: Bridging the gap in 3D object detection for autonomous driving. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 16–20 June 2019; pp. 8445–8453. [Google Scholar]
- Ding, M.; Huo, Y.; Yi, H.; Wang, Z.; Shi, J.; Lu, Z.; Luo, P. Learning depth-guided convolutions for monocular 3D object detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, Seattle, WA, USA, 14–19 June 2020; pp. 1000–1001. [Google Scholar]
- Wang, L.; Du, L.; Ye, X.; Fu, Y.; Guo, G.; Xue, X.; Feng, J.; Zhang, L. Depth-conditioned dynamic message propagation for monocular 3D object detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 454–463. [Google Scholar]
- Huang, K.C.; Wu, T.H.; Su, H.T.; Hsu, W.H. Monodtr: Monocular 3D object detection with depth-aware transformer. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022; pp. 4012–4021. [Google Scholar]
- Simonelli, A.; Bulo, S.R.; Porzi, L.; Ricci, E.; Kontschieder, P. Towards generalization across depth for monocular 3D object detection. In Proceedings of the Computer Vision—ECCV 2020: 16th European Conference, Glasgow, UK, 23–28 August 2020; Proceedings, Part XXII 16. Springer: Berlin/Heidelberg, Germany, 2020; pp. 767–782. [Google Scholar]
- Simonelli, A.; Bulo, S.R.; Porzi, L.; López-Antequera, M.; Kontschieder, P. Disentangling monocular 3D object detection. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 1991–1999. [Google Scholar]
- Ma, X.; Zhang, Y.; Xu, D.; Zhou, D.; Yi, S.; Li, H.; Ouyang, W. Delving into localization errors for monocular 3D object detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 4721–4730. [Google Scholar]
- Zhang, Y.; Lu, J.; Zhou, J. Objects are different: Flexible monocular 3D object detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 3289–3298. [Google Scholar]
- Li, P.; Zhao, H.; Liu, P.; Cao, F. Rtm3d: Real-time monocular 3D detection from object keypoints for autonomous driving. In Proceedings of the Computer Vision—ECCV 2020: 16th European Conference, Glasgow, UK, 23–28 August 2020; Proceedings, Part III 16. Springer: Berlin/Heidelberg, Germany, 2020; pp. 644–660. [Google Scholar]
- Cai, Y.; Li, B.; Jiao, Z.; Li, H.; Zeng, X.; Wang, X. Monocular 3D object detection with decoupled structured polygon estimation and height-guided depth estimation. In Proceedings of the AAAI Conference on Artificial Intelligence, New York, NY, USA, 7–12 February 2020; Volume 34, pp. 10478–10485. [Google Scholar]
- Hu, H.N.; Yang, Y.H.; Fischer, T.; Darrell, T.; Yu, F.; Sun, M. Monocular quasi-dense 3D object tracking. IEEE Trans. Pattern Anal. Mach. Intell. 2022, 45, 1992–2008. [Google Scholar] [CrossRef]
- Heylen, J.; De Wolf, M.; Dawagne, B.; Proesmans, M.; Van Gool, L.; Abbeloos, W.; Abdelkawy, H.; Reino, D.O. Monocinis: Camera independent monocular 3D object detection using instance segmentation. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Nashville, TN, USA, 20–25 June 2021; pp. 923–934. [Google Scholar]
- Chen, Y.; Tai, L.; Sun, K.; Li, M. Monopair: Monocular 3D object detection using pairwise spatial relationships. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 12093–12102. [Google Scholar]
- Mousavian, A.; Anguelov, D.; Flynn, J.; Kosecka, J. 3D bounding box estimation using deep learning and geometry. In Proceedings of the IEEE Conferencef on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 7074–7082. [Google Scholar]
- Brazil, G.; Liu, X. M3d-rpn: Monocular 3D region proposal network for object detection. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 9287–9296. [Google Scholar]
- Li, B.; Ouyang, W.; Sheng, L.; Zeng, X.; Wang, X. Gs3d: An efficient 3D object detection framework for autonomous driving. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 1019–1028. [Google Scholar]
- Xiang, Y.; Schmidt, T.; Narayanan, V.; Fox, D. Posecnn: A convolutional neural network for 6d object pose estimation in cluttered scenes. arXiv 2017, arXiv:1711.00199. [Google Scholar]
- Lu, Y.; Ma, X.; Yang, L.; Zhang, T.; Liu, Y.; Chu, Q.; Yan, J.; Ouyang, W. Geometry uncertainty projection network for monocular 3D object detection. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Virtual Event, 11–17 October 2021; pp. 3111–3121. [Google Scholar]
- Huang, S.; Chen, Y.; Yuan, T.; Qi, S.; Zhu, Y.; Zhu, S.C. Perspectivenet: 3D object detection from a single rgb image via perspective points. Adv. Neural Inf. Process. Syst. 2019, 32, 8. [Google Scholar]
- Girshick, R. Fast r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Daniilidis, K.; Klette, R. Imaging Beyond the Pinhole Camera; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Han, K.; Wang, Y.; Tian, Q.; Guo, J.; Xu, C.; Xu, C. Ghostnet: More features from cheap operations. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 1580–1589. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. Ssd: Single shot multibox detector. In Proceedings of the Computer Vision—ECCV 2016: 14th European Conference, Amsterdam, The Netherlands, 11–14 October 2016; Proceedings, Part I 14. Springer: Berlin/Heidelberg, Germany, 2016; pp. 21–37. [Google Scholar]
- Kingsbury, B. Lattice-based optimization of sequence classification criteria for neural-network acoustic modeling. In Proceedings of the 2009 IEEE International Conference on Acoustics, Speech and Signal Processing, Taipei, Taiwan, 19–24 April 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 3761–3764. [Google Scholar]
- Bühlmann, P.; Yu, B. Boosting with the L 2 loss: Regression and classification. J. Am. Stat. Assoc. 2003, 98, 324–339. [Google Scholar] [CrossRef]
- Palazzi, A.; Borghi, G.; Abati, D.; Calderara, S.; Cucchiara, R. Learning to map vehicles into bird’s eye view. In Proceedings of the Image Analysis and Processing—ICIAP 2017: 19th International Conference, Catania, Italy, 11–15 September 2017; Proceedings, Part I 19. Springer: Berlin/Heidelberg, Germany, 2017; pp. 233–243. [Google Scholar]
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision; Cambridge University Press: Cambridge, UK, 2003. [Google Scholar]
- Shi, X.; Ye, Q.; Chen, X.; Chen, C.; Chen, Z.; Kim, T.K. Geometry-based distance decomposition for monocular 3D object detection. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, QC, Canada, 11–17 October 2021; pp. 15172–15181. [Google Scholar]
- Liu, T.; Zhou, B.; Zhao, Y.; Yan, S. Ship detection algorithm based on improved YOLO V5. In Proceedings of the 2021 6th International Conference on Automation, Control and Robotics Engineering (CACRE), Dalian, China, 15–17 July 2021; IEEE: Dalian, China, 2021; pp. 483–487. [Google Scholar]
- Zhou, D.; Wang, B.; Zhu, C.; Zhou, F.; Wu, H. A light-weight feature extractor for lithium-ion battery health prognosis. Reliab. Eng. Syst. Saf. 2023, 237, 109352. [Google Scholar] [CrossRef]
- Chi, J.; Guo, S.; Zhang, H.; Shan, Y. L-GhostNet: Extract Better Quality Features. IEEE Access 2023, 11, 2361–2374. [Google Scholar] [CrossRef]
- Loshchilov, I.; Hutter, F. Decoupled weight decay regularization. arXiv 2017, arXiv:1711.05101. [Google Scholar]
- Chen, X.; Kundu, K.; Zhang, Z.; Ma, H.; Fidler, S.; Urtasun, R. Monocular 3D object detection for autonomous driving. In Proceedings of the IEEE Conferencef on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 2147–2156. [Google Scholar]
- Rukhovich, D.; Vorontsova, A.; Konushin, A. Imvoxelnet: Image to voxels projection for monocular and multi-view general-purpose 3D object detection. In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, Waikoloa, HI, USA, 4–8 January 2022; pp. 2397–2406. [Google Scholar]
- Everingham, M.; Van Gool, L.; Williams, C.K.; Winn, J.; Zisserman, A. The pascal visual object classes (voc) challenge. Int. J. Comput. Vis. 2010, 88, 303–338. [Google Scholar] [CrossRef]
- Zhang, Y.; Hu, Q.; Xu, G.; Ma, Y.; Wan, J.; Guo, Y. Not all points are equal: Learning highly efficient point-based detectors for 3D lidar point clouds. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022; pp. 18953–18962. [Google Scholar]
- Liang, Z.; Zhang, Z.; Zhang, M.; Zhao, X.; Pu, S. Rangeioudet: Range image based real-time 3D object detector optimized by intersection over union. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 7140–7149. [Google Scholar]
- An, P.; Liang, J.; Yu, K.; Fang, B.; Ma, J. Deep structural information fusion for 3D object detection on LiDAR–camera system. Comput. Vis. Image Underst. 2022, 214, 103295. [Google Scholar] [CrossRef]
- Fan, L.; Xiong, X.; Wang, F.; Wang, N.; Zhang, Z. Rangedet: In defense of range view for lidar-based 3D object detection. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021; pp. 2918–2927. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Benchmark | Easy ⇑ | Moderate ⇑ | Hard ⇑ |
|---|---|---|---|
| Car (Detection) | 90.79% | 83.33% | 71.13% |
| Car (Orientation) | 90.23% | 82.27% | 69.81% |
| Method | Rank ⇓ | Easy ⇑ | Moderate ⇑ | Hard ⇑ |
|---|---|---|---|---|
| PGD-FCOS3D [23] | 406 | 26.89% | 16.51% | 13.49% |
| KM3D-Net [24] | 409 | 23.44% | 16.20% | 14.47% |
| D4LCN [101] | 410 | 22.51% | 16.02% | 12.55% |
| MonoPair [112] | 413 | 19.28% | 14.83% | 12.89% |
| Decoupled-3D [109] | 414 | 23.16% | 14.82% | 11.25% |
| QD-3DT [110] | 415 | 20.16% | 14.71% | 12.76% |
| SMOKE [25] | 416 | 20.83% | 14.49% | 12.75% |
| RTM3D [108] | 417 | 19.17% | 14.20% | 11.99% |
| Mono3D_PLiDAR [99] | 418 | 21.27% | 13.92% | 11.25% |
| M3D-RPN [114] | 420 | 21.02% | 13.67% | 10.23% |
| MonoCInIS [111] | 424 | 22.28% | 11.64% | 9.95% |
| MONO3D [132] | - | 5.22% | 5.19% | 4.13% |
| Proposed MonoGhost network | 405 | 24.91% | 16.73% | 15.01% |
| Method | Time ⇓ | Hardware | Adopted Aproach | CUDA Cores ⇓ | GPU Memory ⇓ |
|---|---|---|---|---|---|
| PGD-FCOS3D [23] | 0.03 s | 4xGTX 1080Ti | Single-Image-Based Approach | 4 × 3584 | 4 × 11 GB |
| KM3D-Net [24] | 0.04 s | 1xGTX1080Ti | Single-Image-Based Approach | 1 × 3584 | 1 × 11 GB |
| D4LCN [101] | 0.2 s | 4xTesla v100 GPUs | Depth-Aided Approach | 1 × 5120 | 1 × 32 GB |
| MonoPair [112] | 0.057 s | 1xGTX1080Ti | Single-Image-Based Approach | 1 × 3584 | 1 × 11 GB |
| Decoupled-3D [109] | 0.08 s | Not mentioned | Single-Image-Based Approach | - | - |
| QD-3DT [110] | 0.03 s | RTX 2080Ti | Single-Image-Based Approach | 1 × 4352 | 1 × 11 GB |
| SMOKE [25] | 0.03 s | 4xGeforce TITAN X GPUs | Single-Image-Based Approach | 4 × 3072 | 4 × 12 GB |
| RTM3D [108] | 0.05 s | 2xGTX1080Ti | Single-Image-Based Approach | 2 × 3584 | 2 × 11 GB |
| Mono3D_PLiDAR [99] | 0.1 s | Not mentioned | Depth-Aided Approach | - | - |
| M3D-RPN [114] | 0.16 s | 1xGTX1080Ti | Single-Image-Based Approach | 1 × 3584 | 1 × 11 GB |
| MonoCInIS [111] | 0.13 s | 1xGTX1080Ti | Single-Image-Based Approach | 1 × 3584 | 1 × 11 GB |
| Proposed MonoGhost network | 0.03 s | 1xRTX3060Ti | Single-Image-Based Approach | 1 × 4864 | 1 × 8 GB |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
El-Dawy, A.; El-Zawawi, A.; El-Habrouk, M. MonoGhost: Lightweight Monocular GhostNet 3D Object Properties Estimation for Autonomous Driving. Robotics 2023, 12, 155. https://doi.org/10.3390/robotics12060155
El-Dawy A, El-Zawawi A, El-Habrouk M. MonoGhost: Lightweight Monocular GhostNet 3D Object Properties Estimation for Autonomous Driving. Robotics. 2023; 12(6):155. https://doi.org/10.3390/robotics12060155
Chicago/Turabian StyleEl-Dawy, Ahmed, Amr El-Zawawi, and Mohamed El-Habrouk. 2023. "MonoGhost: Lightweight Monocular GhostNet 3D Object Properties Estimation for Autonomous Driving" Robotics 12, no. 6: 155. https://doi.org/10.3390/robotics12060155
APA StyleEl-Dawy, A., El-Zawawi, A., & El-Habrouk, M. (2023). MonoGhost: Lightweight Monocular GhostNet 3D Object Properties Estimation for Autonomous Driving. Robotics, 12(6), 155. https://doi.org/10.3390/robotics12060155