1. Introduction
The dynamics of mechanical systems are physically governed by their storage and dissipation of energy, and the power flow originating from the interaction with other systems. These systems are at rest when the energy in the system is minimal and the associated equilibrium tends to be stable and robust to perturbations. Passivity-based control (PBC) is a control methodology based on these principles, shaping the energy of a system via suitable control inputs to be minimal at the control objective. This generally results in robust stabilizing controllers, even when the system under study is nonlinear.
In this work, we propose two novel distributed control architectures for networks of mechanical systems that inherit the robust stability properties of PBC in a networked context. We use these properties to develop a framework in which system interconnections become robust and modular, i.e., independent of the individual system dynamics. Our approach is applicable to networks of systems, where each system has a different dynamical model. Such networks are referred to as
heterogeneous. The aforementioned properties are useful in many engineering domains where interaction between varying system types is beneficial and can have applications in medical, logistic, or aerospace industries [
1,
2].
An important distinction between systems is their degree of actuation. The states of
fully actuated systems can be influenced directly from the input. For these types of systems, distributed PBC controllers are well-established (see [
3] for a summary). On the contrary,
underactuated systems lack actuation in one or multiple directions of the state space. The resulting control problem for these systems is more complicated and a general approach is lacking. One of the most general frameworks for these types of systems is Interaction-and-Damping Assignment passivity-based control (IDA-PBC) [
4], which controls the open-loop system to match, in closed-loop, a desired system with minimum energy at the control objective. Adding damping to the closed-loop system forces it towards the assigned equilibrium. Our first method is a cooperative extension of this method that applies to heterogeneous networks of systems with fully actuated or underactuated dynamics.
We formulate our cooperative objectives in generalized end-effector coordinates, which include Cartesian coordinates as a special case. Next to the case of synchronization, we provide control laws that stabilize the network of systems at a static configuration. With agents assigned as leader, the configuration is achieved at a user-specified reference position. We refer to this combination of control objectives as the Leader-Follower Formation Control (LFFC) problem.
In cooperative control, the communication network is critical for the performance and stability of the multi-agent system. Communication delays can be destabilizing and in a PBC context can cause the network to lose its passive behavior [
5]. Our second method uses the scattering transformation (ST) [
5] to transform the networked variables, making the network passive. We modify the outputs of the agents to include the generalized coordinates and their velocities. A local control law ensures passivity of the agents in the modified outputs as viewed from the network. We show that the cooperative control scheme converges to the cooperative objectives, even if the delays in the network vary over time or if communicated packets are lost.
Contribution: this work builds on our previous works [
6,
7]. We present the methods in the same framework and include simulations and experimental results. We present two distributed cooperative passivity-based controllers:
A unified IDA-PBC scheme for cooperative stabilization of heterogeneous networks of fully actuated and underactuated agents that builds on existing single-agent IDA-PBC controllers. Our approach satisfies the matching conditions of each underactuated agent, independently of the cooperative input, by suitably defining the cooperative variables.
A cooperative PBC scheme for fully actuated systems that is robust to time-varying delays and loss of communication packets, while the end-effector dynamics, by default, are transformed to behave as point-masses in the cooperative space, or follow desired dynamics as specified by the control designer.
Related Work
The design of stable controllers for a group of systems using passivity-based control is well-established. In particular, since feedback and parallel interconnections of passive systems are passive (and stable), complex nonlinear systems may be stabilized by ensuring passivity for individual systems and their controllers. In this context, it was shown in [
8] that under a particular interaction topology (connected and undirected graph), control based on a well-designed potential function results in convergence to a desired set of equilibria for the group of agents, given that the individual agents are passive. For mechanical systems, control via passivity interacts with both the velocity and force of end-effectors. This makes it well-suited for control under interaction with the environment or other robots. Examples of its use are in bilateral teleoperation [
5,
9,
10], where an operator controls the system remotely and in applications where the robot interacts directly with its environment [
11]. Typically, passivity-based control design models the nonlinear plant dynamics using Euler-Lagrange (EL) or Hamiltonian dynamics [
12], since these modeling techniques explicitly formulate the kinetic and potential energy of the system.
PBC methods for fully actuated systems are well-developed. LFFC methods for joint synchronization of a homogeneous network with fully actuated EL systems are proposed in [
13,
14]. These approaches achieve joint synchronization under different network topologies but are applicable only to a limited set of dynamical systems. The approach in [
15] considers networks of
underactuated flexible-joint manipulators. Their control law, relying on a suitable definition of the control error, synchronizes end-effector Cartesian coordinates when constant unknown communication delays are present. The work [
16] considers similar systems with non-identical model parameters and variable communication delays in the network. Their approach is composed of a local gravity compensating term and a networked term with proportional and derivative action. Although these approaches are well-suited for the considered system types, they lack applicability in the general case. We propose a novel distributed LFFC method in generalized coordinates for networks of heterogeneous underactuated and/or fully actuated systems. We base our approach on IDA-PBC [
4]. Our approach extends directly from a large set of single-agent solutions which include flexible link manipulators and the vast class of systems with one degree of underactuation [
17]. In contrast to distributed IDA-PBC methods that tackle a specific set of systems, the proposed method applies to all systems in the aforementioned classes and does not require the control designer to solve nonlinear Partial Differential Equations (PDEs).
In addition, this architecture allows for the incorporation of other extensions to single-agent IDA-PBC where the matching conditions are unmodified, such as the work in [
18], which introduces a suitable integral action to overcome matched and unmatched disturbances.
To additionally study the effect of communication delays, we consider the case of fully actuated system networks with varying communication delays and packet loss. In [
19], a passivity-based controller for networks of heterogeneous fully actuated agents is developed in the EL framework, which is robust to time-varying time delays when velocities are sufficiently damped. Additionally, the method does not require velocity measurements. Similar model-free approaches were also presented [
20,
21]. Rather than formulating a condition on damping, another typical approach is to ensure that the communication channel is passive under delays, such that the closed-loop system including the communication network is passive and, therefore, stable. The most common approach for designing a passive communication channel is to transform the communicated variables to
wave-variables, using the scattering transformation (ST) [
5,
10]. In contrast to the regular communicated variables, the power of wave-variables traveling through the network is well-defined. Hence their energy qualifies as a storage function, making the network passive. Although this approach is simple and effective, the ST modifies the dynamics of the communication channel which can lead to deteriorated performance. Therefore, alternative methods have been proposed that improve the
transparency of the communication channel (i.e., its ability to mimic a direct communication link). Mainly, in [
22], the Time Domain Passivity Approach (TDPA) consisting of a “passivity-observer” and “passivity-controller” are introduced into the network to monitor the energy and absorb energy, if necessary, such that passivity is guaranteed. Alternatively, the Passive Set Position Modulation (PSPM) approach [
23] ensures passivity of the network with minimal performance loss for networks sending and receiving position data. Recently, an extension to the ST was presented in [
24], which eliminates the dynamics of the transformed communication channel. Their solution approach adds a simple algebraic manipulation to the ST, preserving its properties while introducing an extra degree of freedom that overcomes the negative dynamic effects of the regular ST.
In this work, for simplicity, we apply the regular ST to achieve passive communication between agents, although the extension in [
24] applies directly to the presented framework. In addition, we make use of Wave-Variable Modulation [
25] in discrete-time to overcome time-varying delays and packet-loss. Our second method builds on two works. In the first [
26], a PBC method incorporating the ST is applied to a multi-agent network of passive fully-actuated systems with communication delays. Their results show that synchronization of agent outputs emerge for a set of passive inter-agent control functions. The second method [
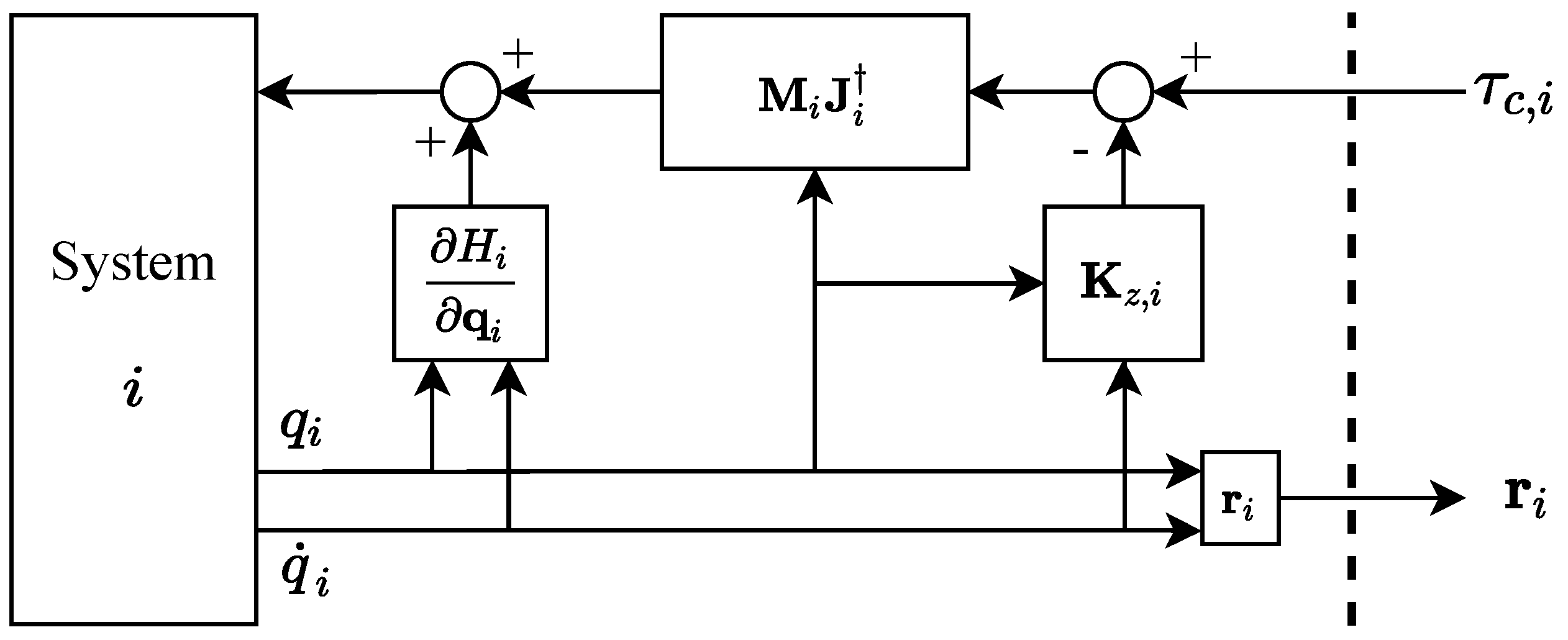
27] shows that outputs
r consisting of joint velocity and joint coordinates are passive and when applied in this framework result in synchronization of the joint coordinates in the presence of communication delays. Since for these outputs the notion of passivity is not related to physical energy, passivity in this setting is often referred to as
r-passivity. In [
28], this result is extended to the case of Cartesian coordinates, defining
r by the Cartesian velocity and coordinates of the end-effector [
28]. Our control approach is based on the same principles, but significantly simplifies the interconnection of heterogeneous systems. In particular, our framework allows the designer to explicitly characterize the local and cooperative damping, and the objectives of the multi-agent system. In addition, the cooperative dynamics can be set by a desired cooperative inertia matrix which, by virtue of the proposed controller, follow point-mass dynamics by default. Hence, the controlled network of heterogeneous systems behaves by default as a network of homogeneous systems, significantly reducing the design effort required for their interconnection.
Outline: the plant dynamics and control problems are formally introduced in
Section 2. Fundamentals of passivity and IDA-PBC are reviewed in
Section 3.
Section 4 and
Section 5 introduce the main contributions: cooperative IDA-PBC and r-PBC. The proposed methods are validated in simulations in
Section 6 and in experiments in
Section 7. A discussion is presented in
Section 8 and conclusions are presented in
Section 9.
Notation: we will denote vectors and matrices in bold. The left pseudo-inverse of matrix is denoted by such that . Partial derivatives are assumed to be column vectors. We denote by the identity matrix of dimension n and by the matrix with all zero entries of dimension . The quadratic form is shorthand for . The set refers to the set of indices .
2. Problem Formulation
We consider simple mechanical systems in a Hamiltonian framework [
12]. The kinetic energy of a simple mechanical system is determined by its inertia matrix
; we will often write system matrices without their explicit dependency on the joint-coordinates, i.e.,
. Each agent
i is modeled by
The state is composed of the joint-coordinates and momenta , which relate to the joint-velocities via . The input enters via the input matrix . The system is fully actuated if and and is underactuated if . The natural damping is assumed to be zero throughout this work. The total system energy is given by the Hamiltonian , which is composed of the kinetic energy and the potential energy .
The generalized end-effector coordinates,
, denote the controlled system variable, for example Cartesian end-effector coordinates for a robotic arm or the 2D position of a vehicle. The generalized end-effector velocities are computed from the end-effector Jacobian
, defined by
We are now ready to formally state our problem definitions.
Problem 1. Consider a network of N heterogeneous mechanical agents modeled by (
1a)–(
1c),
communicating over a delay-free, undirected and connected graph . The cooperative control objectives on each edge pair are specified by the final inter-agent displacement vector . The problem is formally solved by satisfying the following objectives: where and represents indices of the leaders. Problem 2. Consider Problem 1, where the bidirectional edge pair is subject to unknown time-varying delays , satisfying . We formulate condition (
5)
with delays as 3. Review of Passivity and Single-Agent IDA-PBC
The passivity property links a system’s externally supplied power, stored energy and dissipated energy. We formally define passivity as follows.
Definition 1 ([
26]).
A system is said to be passive if there exists a storage function , , and a dissipation function for which the passivity property holds. An equivalent expression, obtained by differentiation, is When a passive system is not exchanging energy via its input–output port, that is if
, then we have
, which is one of the necessary conditions to construct Lyapunov functions. Hence, the passivity property is a stability property that extends to systems where energy is exchanged with an external system (e.g., a controller). The Hamiltonian dynamical Equations (
1a)–(
1c) can be shown to be passive.
The open-loop equilibrium
of the system generally does not coincide with the control objective
. We therefore consider a control law
, such that the closed-loop dynamics attain the desired passive dynamics (subscript
d). Introducing a desired inertia matrix
, damping matrix
and
to introduce necessary gyroscopic forces, the desired dynamics are given by
The desired potential function
is designed such that it attains a minimum at the control objective, i.e.,
and is zero if and only if
. Equations (
1a)–(
1c) and (
9a)–(
9c) directly yields a control law in the fully actuated case. For underactuated systems, we find a set of equations that can be decoupled using the full rank transformation
where
is an annihilator of
, such that
. This results in two sets of equations. The last
rows denote necessary conditions for matching the plant with the desired dynamics and are referred to as the
matching conditions. They are often split in a condition on kinetic energy terms
and in the potential energy terms
Whereas for fully actuated systems, the potential energy can be shaped directly; for underactuated systems, often the kinetic energy needs to be shaped along with the potential energy in order to achieve the control objective. Hence, the main problem in IDA-PBC design is to find a set of matrices
and potential
that satisfy the matching conditions (
10) and (
11). Although no general solutions to these equations exist, for sub classes of systems an explicit solution is available (e.g., for systems with one degree of underactuation such that
[
17]). Given a solution to the matching equations, the resulting IDA-PBC law is given by the first
m rows
The proof of [
17], Proposition 1, shows that
is stable if
is locally positive definite in a neighborhood around
and is asymptotically stable if, additionally, the equilibrium
is locally detectable from the output
, which holds if
implies
.
6. Simulation Results
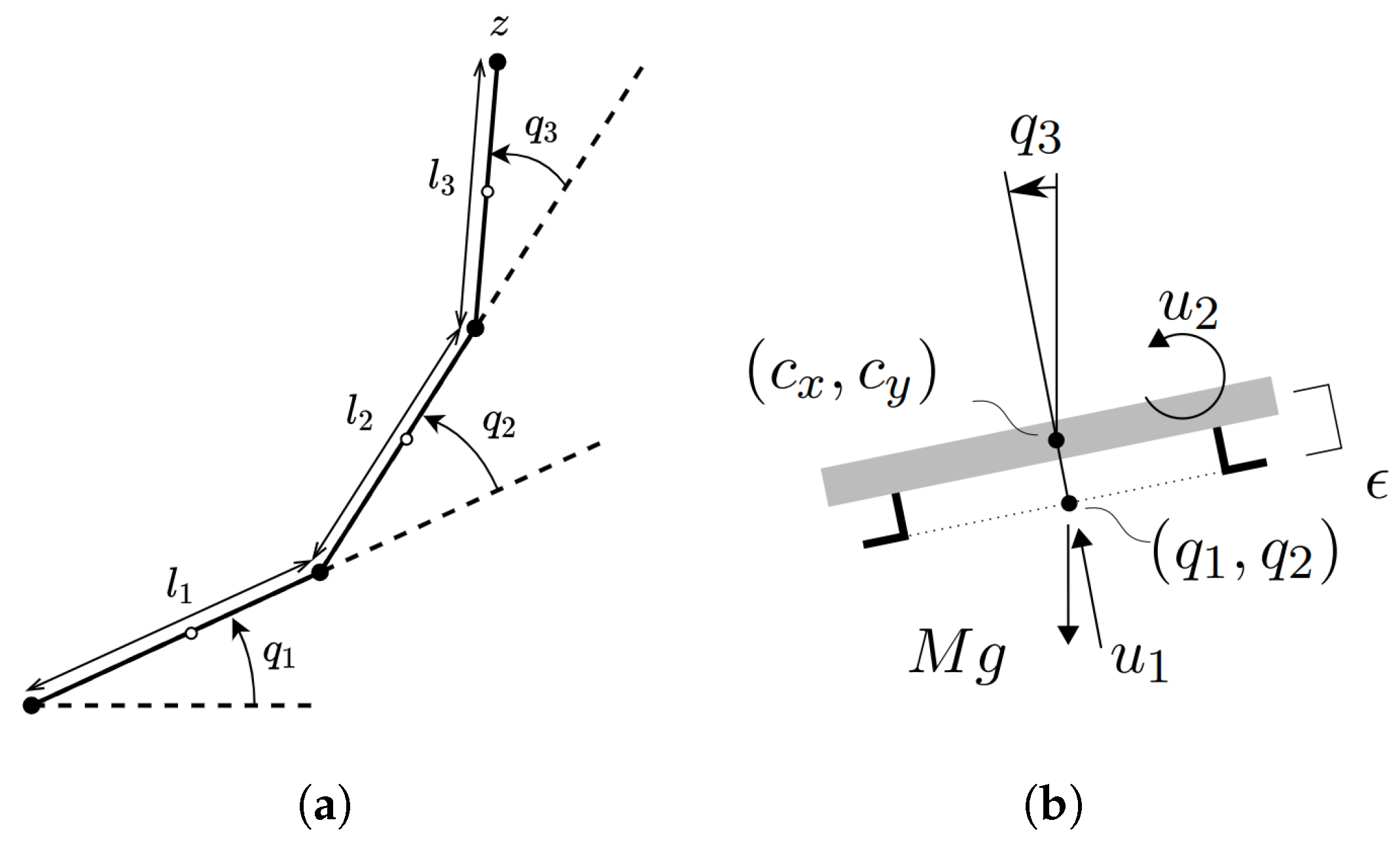
In the following section, we provide a qualitative comparison between IDA-PBC and r-PBC in simulation, with and without communication delays. We also provide results for the case of underactuated systems (IDA-PBC) and subtask optimization (r-PBC). To compare the two methods, we consider a scenario with two robotic manipulators, each with three joints as depicted in
Figure 3a. The control objective is to reach consensus
in the 2-dimensional plane, without specifying a convergence point a priori. We define the inputs and joint-coordinates as the torque and angle of each joint, respectively. The end-effector dynamics of this system are nonlinear and the states have a redundant degree-of-freedom; hence, it is suitable to illustrate both approaches. For completeness, we first derive a model for the manipulator.
Denote by
the center of gravity, by
the mass, by
the length and by
the inertia each of link
k, and let
. We can write the potential energy and end-effector position as
If we define
, then the kinetic energy may be expressed as
An expression for the inertia matrix is then given by
In the following simulations, let
m,
kg and
= 0.05 kgm
for each link. In all cases, we set the network gain
and
. In the case of IDA-PBC, we only compensate for gravity, i.e.,
. We inject damping on the joint coordinates using
. Our r-PBC controller is parameterized by
and damped with
. An advantage of the potential-based control terms used with both methods is that the 2-norm of the errors in the cooperative potentials (
24) and (
30) can be scaled to improve the convergence rate close to the consensus point. Denoting with
d the cooperative error, we apply the following scaling
originally presented in [
33]. The inner radius
r and outer radius
are tuned to improve the rate of convergence. The resulting cooperative potential is
where
,
denote the cooperative and leader tracking error, respectively.
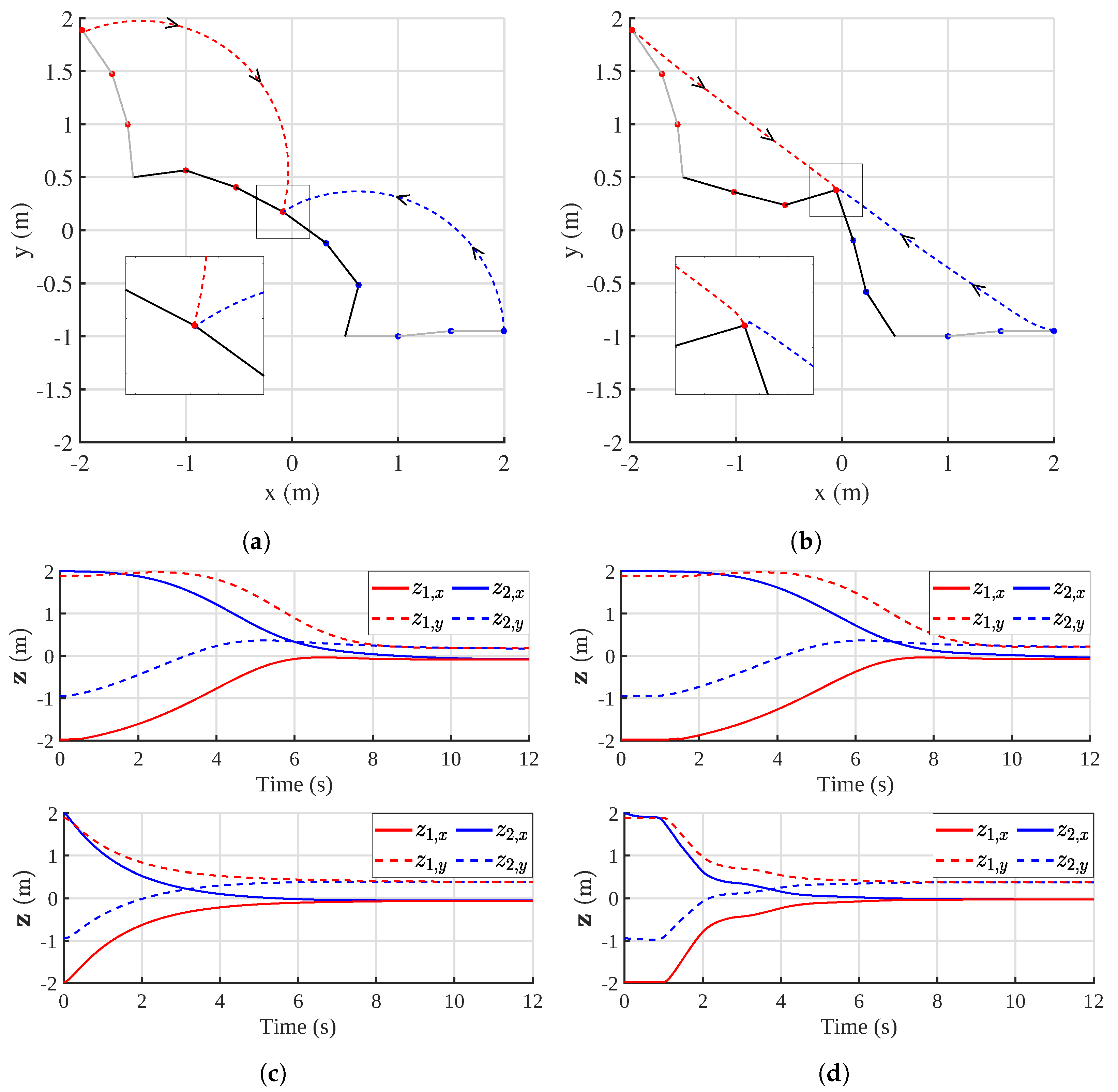
Figure 4a,b depict the cooperative trajectories in the absence of delay and
Figure 4c shows the associated coordinates over time. Both methods converge cooperatively, but the transient response of cooperative IDA-PBC is slow compared to r-PBC and the end-effector travels a larger distance. We relate the performance gap to the input matrices. Where cooperative IDA-PBC is a transpose Jacobian method (as a result of the definition of the cooperative coordinates), r-PBC is a pseudo-inverse Jacobian method (for details see [
34]). The latter directly maps a motion in cooperative coordinates to the required motion in joint angles, whereas transpose Jacobian methods are merely an approximation of this inverse mapping (a disadvantage of pseudo-inverse methods are kinematic singularities, also present in these examples, and a well-known solution is to apply subtask optimization to evade these configurations [
32]). This is also visible at the end of the simulation where for IDA-PBC, the component of the cooperative force in the direction of the cooperative mapping is nearly zero, causing slow convergence near the consensus point.
We repeat the simulations with communication delays. The injected time varying delays follow a random walk process with 0.3 s
s,
and are unique for the two edges, but consistent between simulations. The resulting coordinates over time are depicted in
Figure 4d. The performance of IDA-PBC is further degraded near the consensus point, but the method remains stable, even though the delay is not incorporated in the design. For r-PBC, the transient behavior has changed. The cooperative energy is dissipated in distinct waves. This is clearly visible in the coordinates of the blue manipulator, which decays exponentially within a distinct set of time intervals (most visibly around 1 and 3 s). Nevertheless, the convergence rate is unaffected.
To illustrate cooperative IDA-PBC with underactuated and fully actuated systems, we replace one of the manipulators with an Unmanned Aerial Vehicle (UAV) moving in the x,y-plane (see
Figure 3b). The system is actuated by a thrust force and a rotation in the plane around its center. Since thrust force is vertical with respect to the vehicle frame, it cannot move in all directions instantaneously and is underactuated. The cooperative end-effector is a point on the landing gear of the UAV at a distance
below its center of rotation. For completeness, we give the model and single-agent IDA-PBC solution; more details are given in [
29], Chapter 11. The UAV joint configuration is defined by its
position (
) and its orientation (
). Via the input transformation,
with
M and
I being the scalar mass and inertia of the system, its Hamiltonian dynamics satisfy
and
The transformed UAV dynamics have one degree of underactuation. The following IDA-PBC solution was derived in [
17]:
The resulting single-agent IDA-PBC law stabilizes the UAV in its upright position. We set the parameters of the solution as
,
and
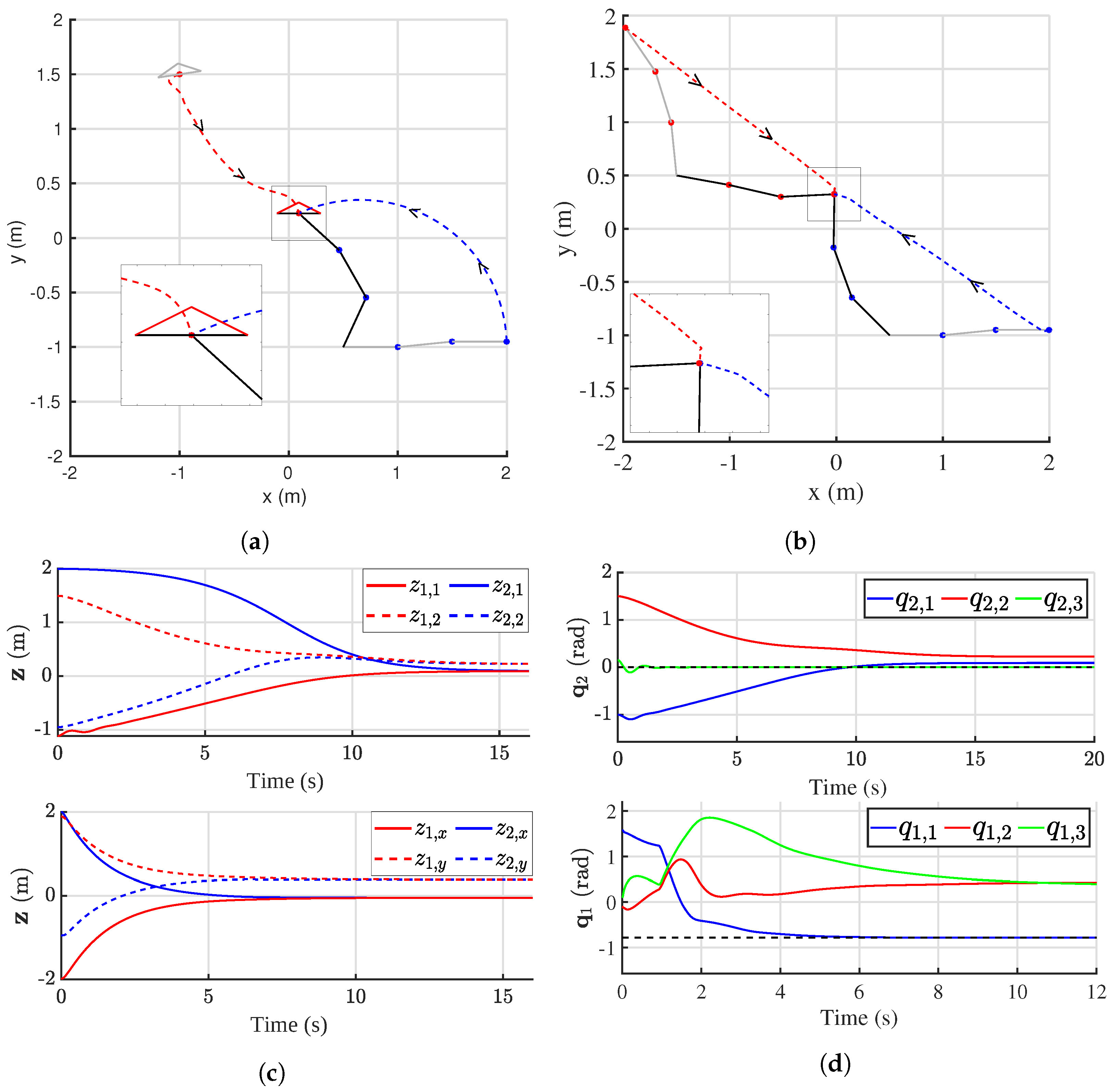
, which result in fast tracking in single-agent simulations. We tune the cooperative control gain as
. The resulting trajectories and generalized end-effector coordinates are visualized in
Figure 5a,c, respectively. The UAV stabilizes and descends to achieve consensus with the manipulator without overshooting the final consensus point. The joint-coordinates of the UAV are depicted in
Figure 5d and show the stabilized orientation in the upright position.
Lastly, we validate subtask optimization of r-PBC. The simulation of two manipulators is repeated, specifying a local quadratic potential function
, which penalizes the error
with
and we set
. This explicitly controls the redundant degree of the first manipulator to a reference angle.
Figure 5b,c depict the trajectories and generalized end-effector coordinates, respectively.
Figure 5d plots the joint-coordinates over time. The first joint angle successfully tracks the reference angle. Additionally, the cooperative objective is achieved at a similar rate as for the case without local tracking. At the start of the simulation, the joints start moving directly in order to satisfy the local objective until around
s, where the cooperative information is received and both the cooperative and local goals are achieved at the same time.
7. Experimental Results
The following section features an experimental evaluation of the proposed methods. The experimental setup consists of the Franka Emika Panda [
35], a 7 Degree-Of-Freedom (DOF) robotic manipulator, and an Elisa3 differential drive robot [
36]. The dynamics of these systems are vastly different in terms of inertia matrix, joint-coordinate description, potential energy function and degrees of freedom, and serve to illustrate the application scope of the proposed approaches.
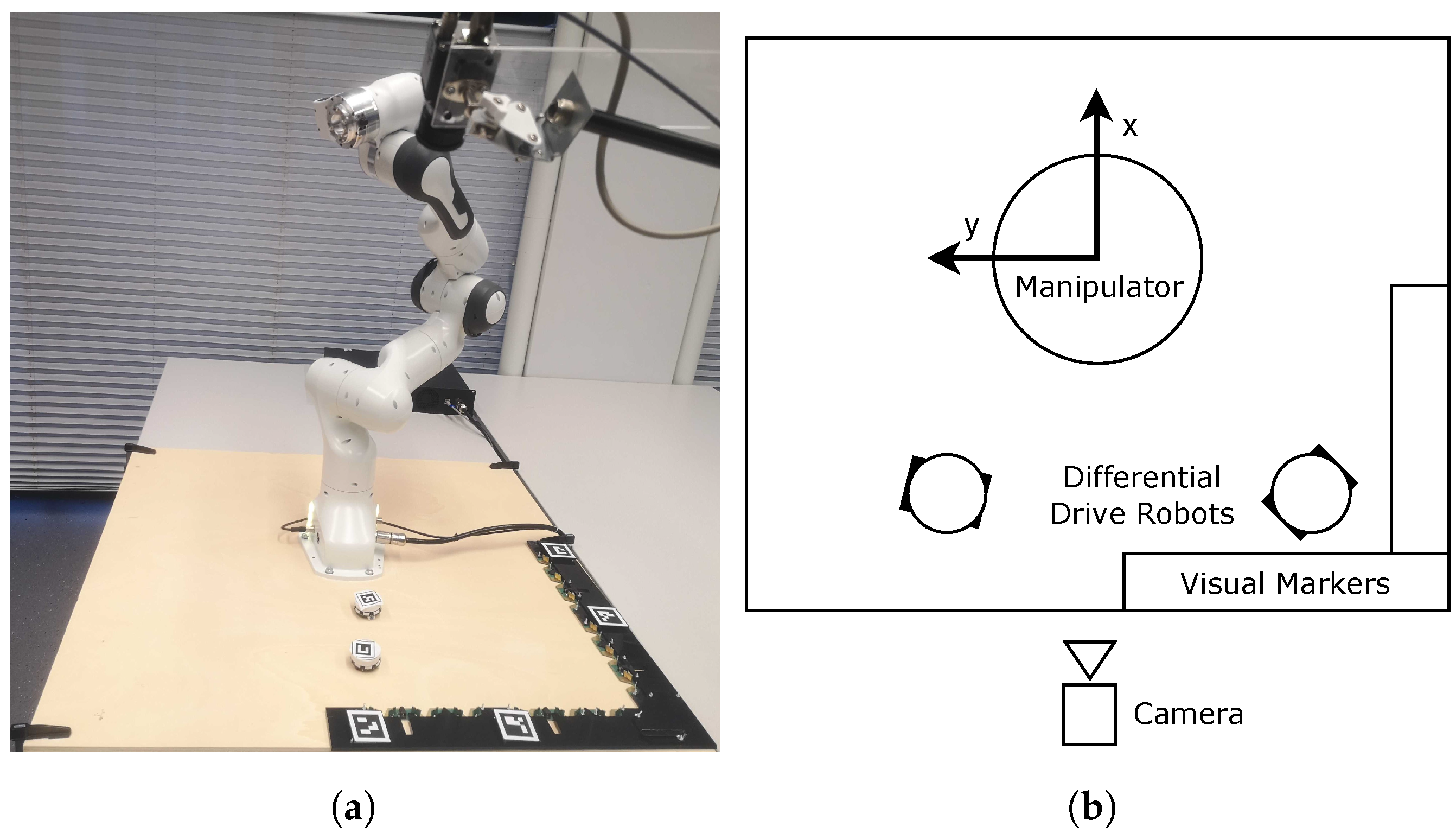
A photo and schematic of the experimental setup are provided in
Figure 6a,b, respectively. Both systems are controlled from one PC. The robotic manipulator connects to the PC via an Ethernet connection, which is used to read joint-angles and to send the control commands at a rate of 1 kHz. Additionally, we obtain the inertia matrix and potential function through this data link, although in principle a basic model of the 3D, 7-link manipulator can be derived in the same way as the model derived in
Section 6 for the 2D, 3-link manipulator. The differential drive robots are controlled via a wireless communication link at a rate of 100 Hz. Their position in the
-plane is detected via a camera system and a set of markers (See
Figure 6a). We feedback linearize the dynamics of the robot around a point in front of the robot axis (see [
37], Equation (5)). The resulting dynamics are that of a point mass in 2D, that is,
,
. The cooperative coordinates are the
coordinates as indicated in
Figure 6b. Accordingly, the robotic manipulator has redundant degrees of freedom. We limit its motion by stabilizing the
z coordinate at
. In practice, we observe unmodeled friction in the joints of the manipulator. To compensate, the cooperative mass of the system for r-PBC is scaled down to
and we set
.
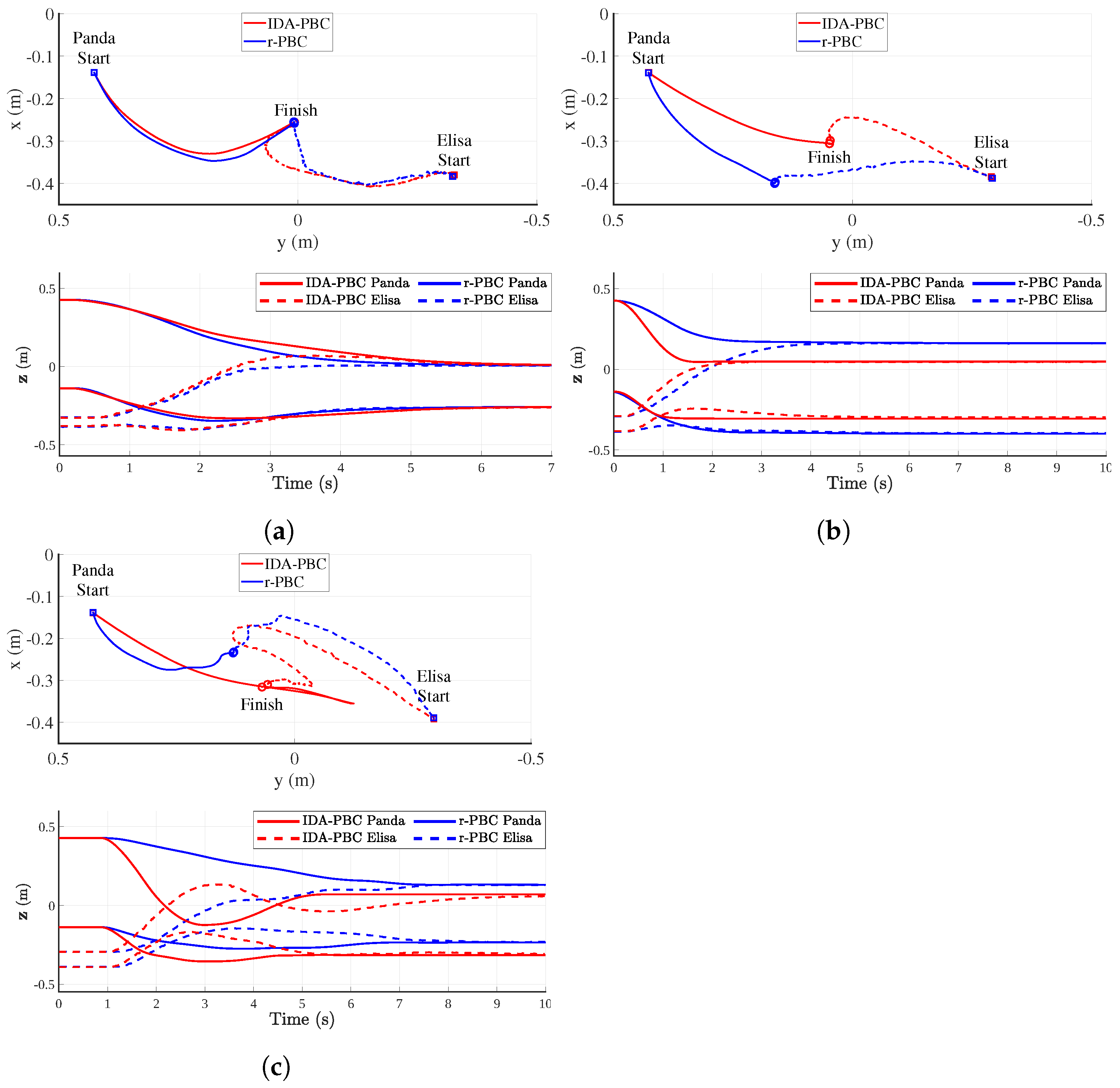
We validate the control methods in a consensus experiment. In the first experiment, the robotic manipulator is set as leader with reference
. Trajectories and cooperative coordinates are depicted in
Figure 7a. Both methods achieve consensus and converge to the leader reference. Due to the guidance of the leader, the trajectories of both approaches are similar. We repeat the experiment without the leader reference such that the objective is to reach consensus at an arbitrary point, as visualized in
Figure 7b. Both methods converge faster than with a leader. With IDA-PBC, however, the driving robot is compensating for the slow convergence rate of the manipulator in the direction orthogonal to its end-effector orientation, similarly to the effect we remarked in
Section 6. In contrast, using r-PBC, both systems have an approximately equal part in reaching consensus.
We repeat the leaderless experiment, injecting artificial communication delays generated from a random walk process. The delays are parameterized by 0.8 s
1.0 s,
. Packet loss is generated by a Bernoulli drop model with
. To handle packet loss and time-varying delay, we passively reconstruct the wave variables on the receiving end of each edge using Wave-Variable Modulation (WVM) [
25]. The reconstruction extracts maximum energy from the network while preserving passivity.
Figure 7c depicts the resulting trajectories and cooperative coordinate evolution. Both methods show degraded performance compared to the case without delays. Although the r-PBC trajectories show oscillations in the cooperative plane, the consensus point is not passed by either system and cooperative consensus forms directly. The cooperative coordinates also reveal the wave-like convergence, similarly to the simulated case. We expect that the difference in consensus point with the undelayed case is due to the velocities that are included in the agent output
r, used for control. In the undelayed case, the manipulator moves rapidly, causing the driving robot to anticipate its movement. In the delayed case, the driving robot receives this information later, at which point the manipulator may have already changed its course to meet the driving robot. The trajectories of IDA-PBC indicate a loss of cooperative dissipation in the presence of delays, which causes the systems to spiral towards the consensus point. This shows that delays can still destabilize this controller.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}