Application of Path Planning for a Mobile Robot Assistance System Based on OpenStreetMap Data


Abstract
1. Introduction
1.1. Related Work
1.1.1. OpenStreetMap
1.1.2. Sidewalk Navigation
1.2. Paper Organization
1.3. Architecture of the Shared Guide Dog 4.0
1.4. OpenStreetMap Data Model
| Listing 1. Example of node, way, and relation represented in OpenStreetMap’s XML data format: Ways and relations are formed by lists of references to IDs. |
| <node id = ‘253416079’ lat = ‘53.5571377’ lon = ‘10.0197035’> <tag k = ‘amenity’ vs. = ‘bench’ /> </node> <way id = ‘5229522’> <nd ref = ‘253416079’ /> <nd ref = ‘7156477920’ /> <tag k = ‘highway’ vs. = ‘residential’ /> </way> <relation id = ‘2872789’> <member type = ‘node’ ref = ‘6055658161’ /> <member type = ‘way’ ref = ‘466451524’ /> <member type = ‘way’ ref = ‘383422087’ /> </relation> |
2. Path Planning
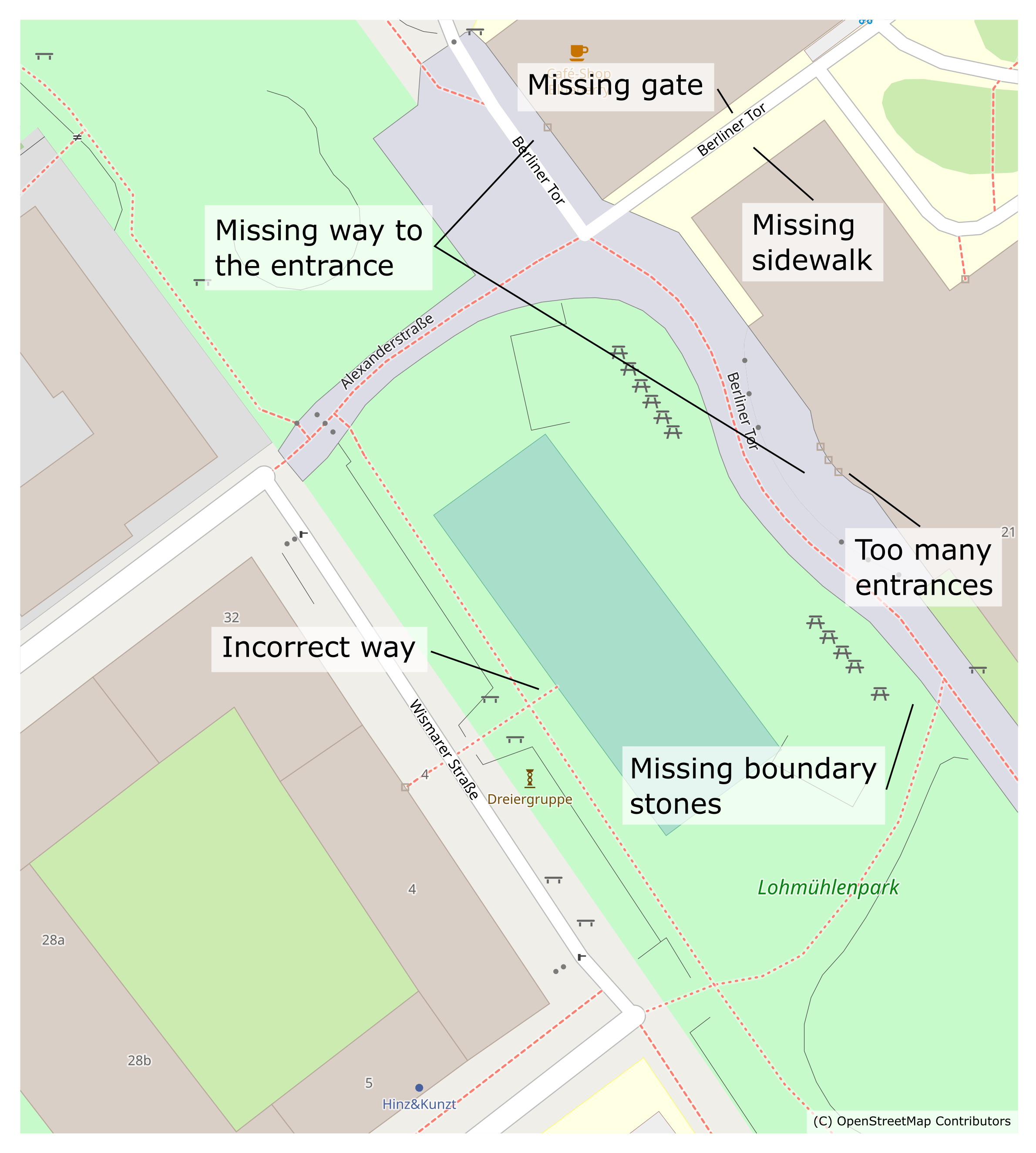
2.1. Preparing OpenStreetMap Data
2.1.1. Positional Accuracy
2.1.2. Completeness/Temporal Quality/Thematic Accuracy
2.2. Augmentation
- 1.
- Check whether the dataset is fully connected (every node is reachable from every other node)
- 2.
- Search for ways with unnamed dead ends
- 3.
- Add separate footways
- 4.
- Convert areas into ways
- 5.
- Check if all objects are presented in the map
- 6.
- Add the relevant tags to all ways
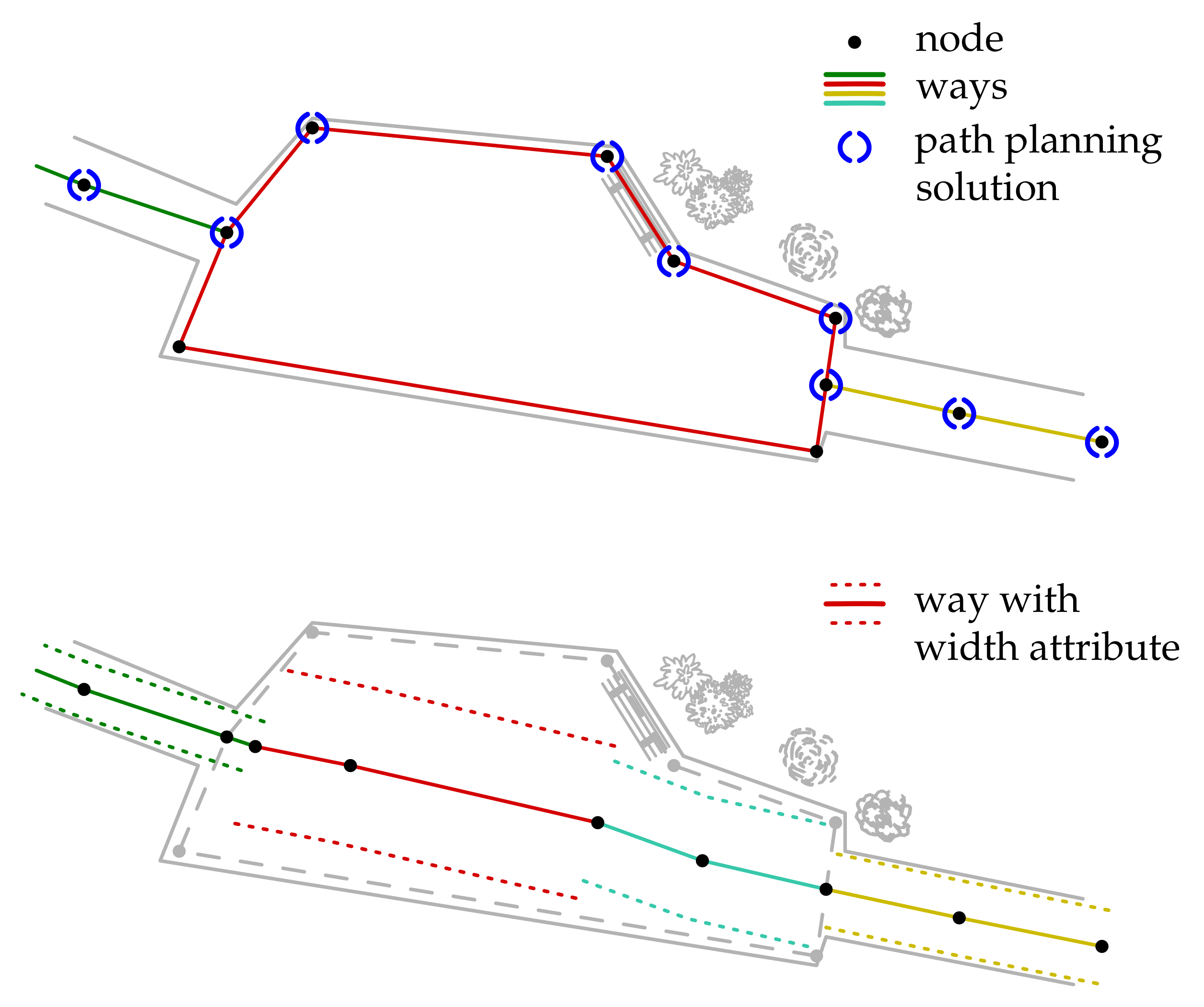
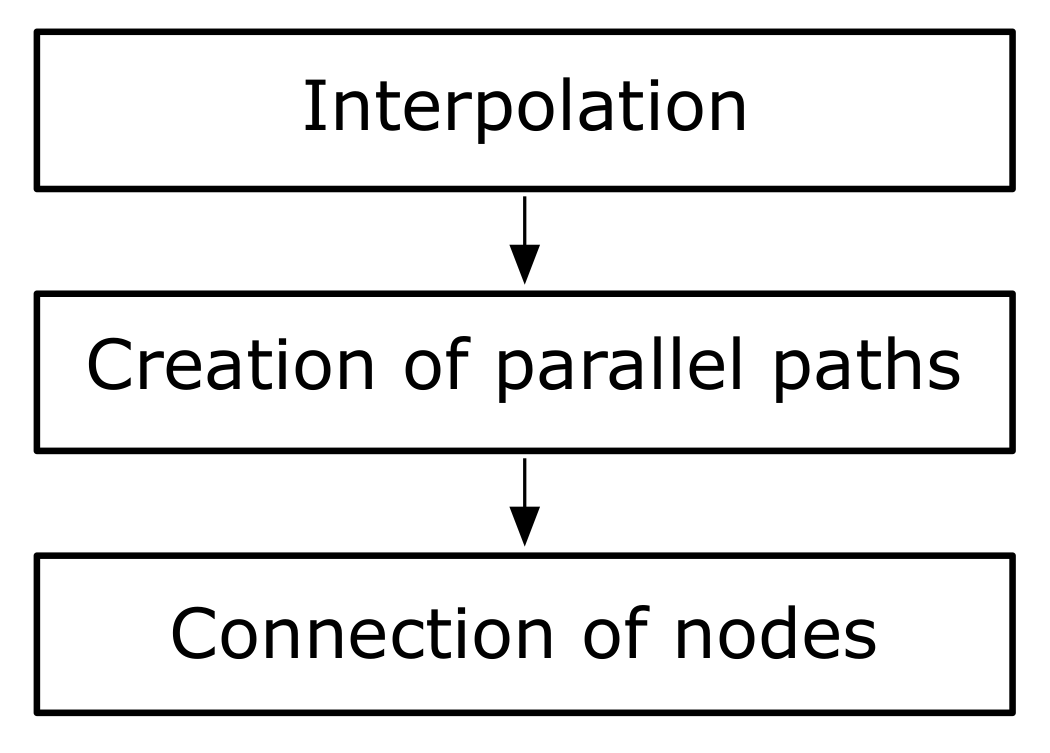
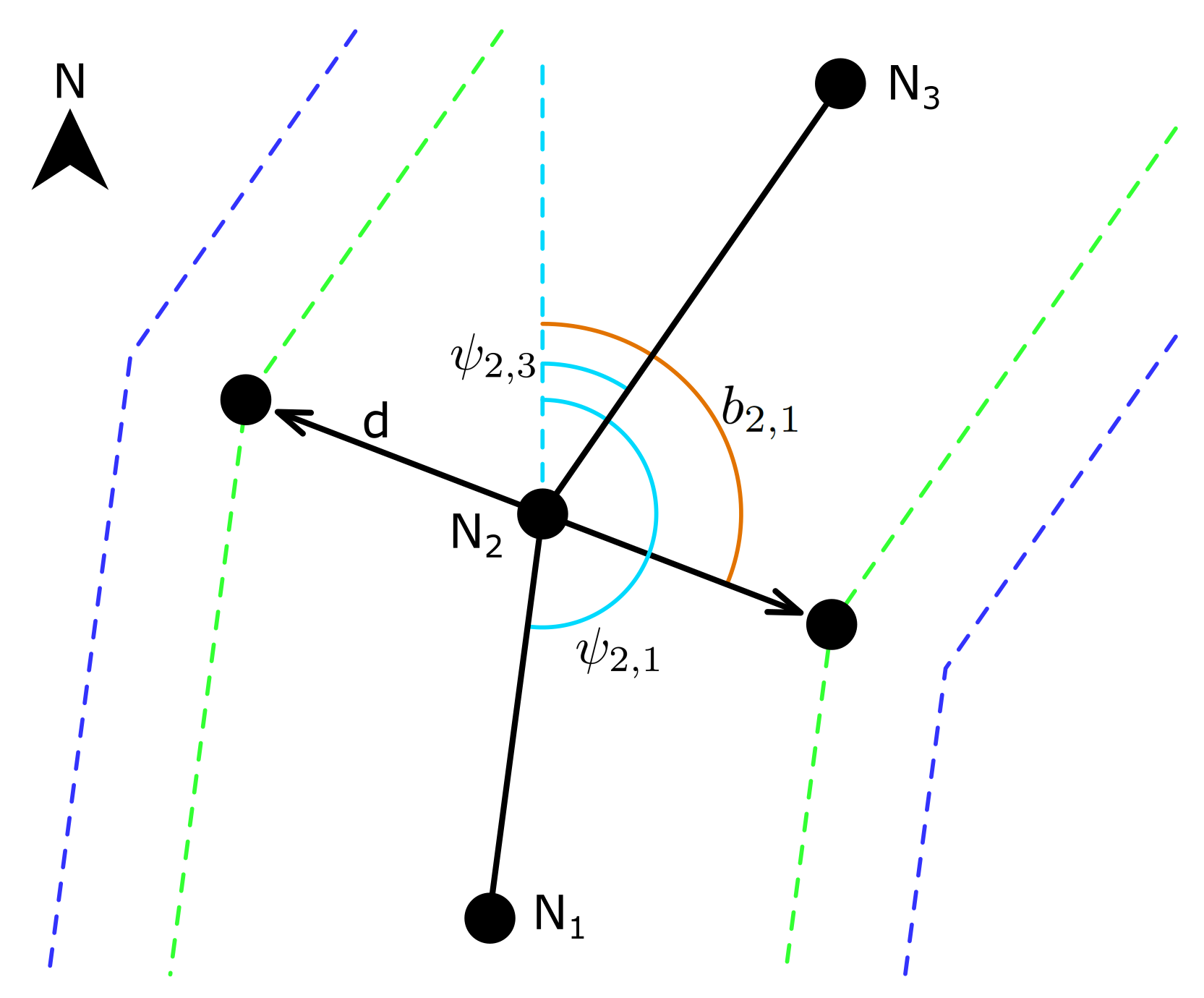
2.3. Path Generation
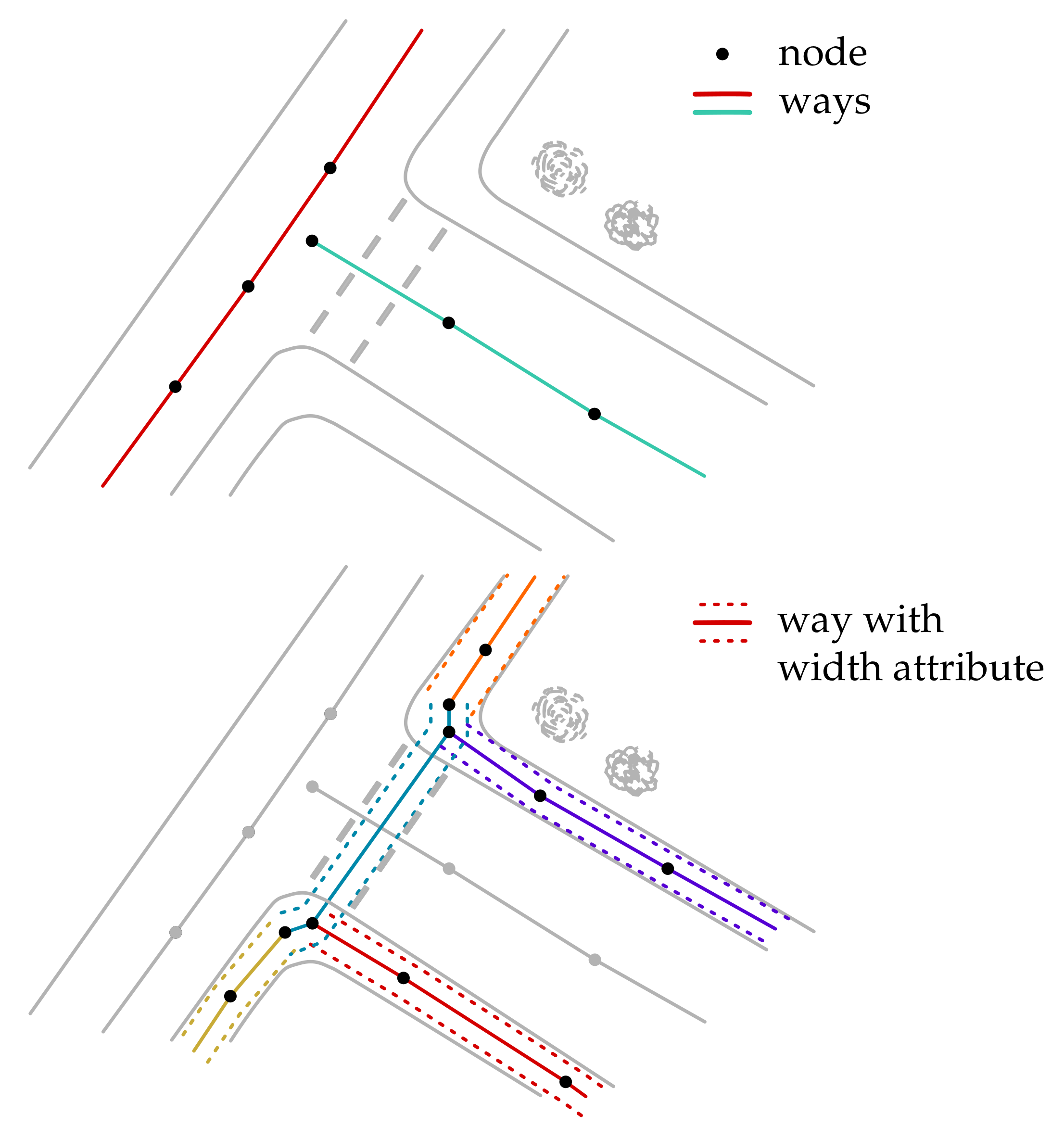
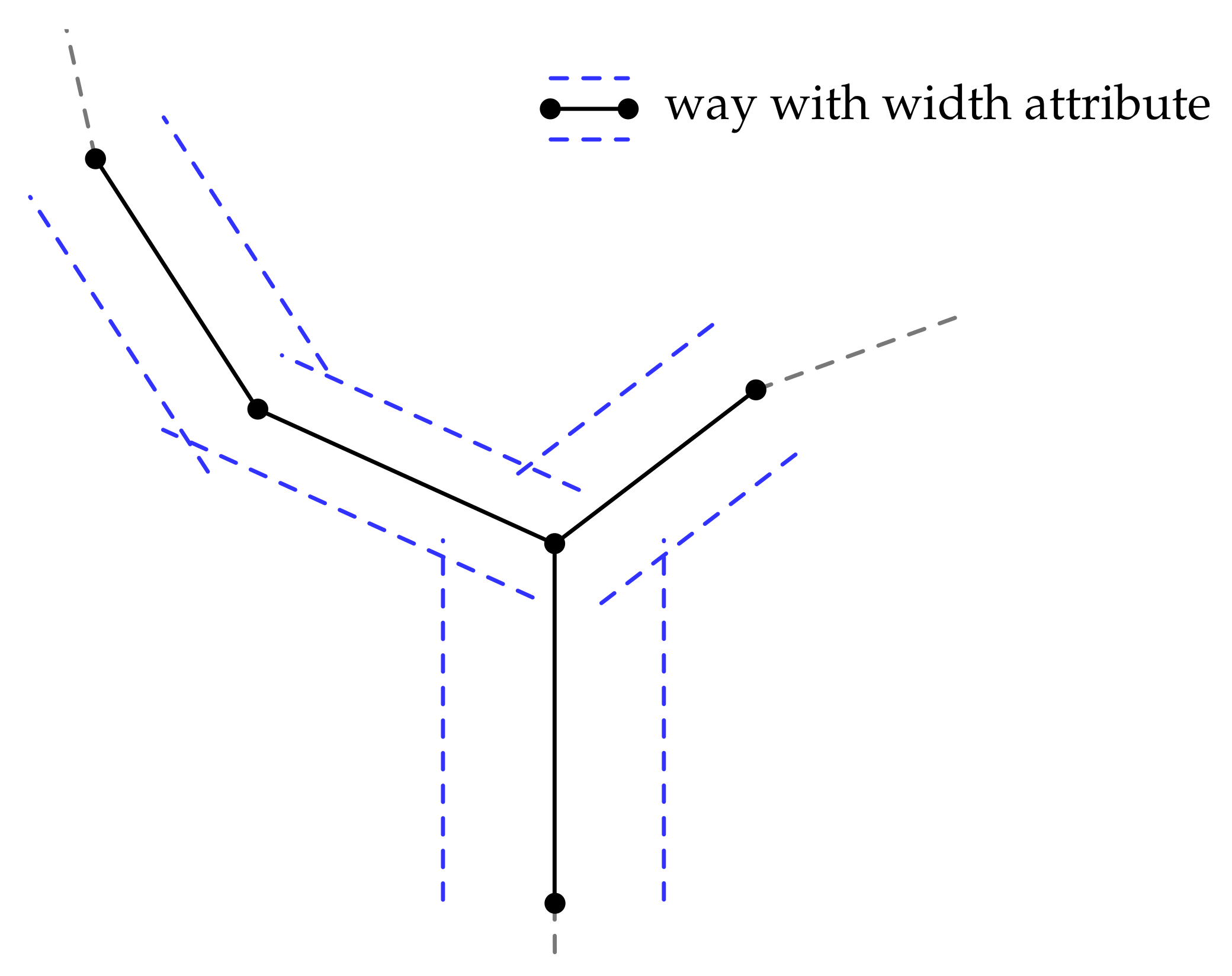
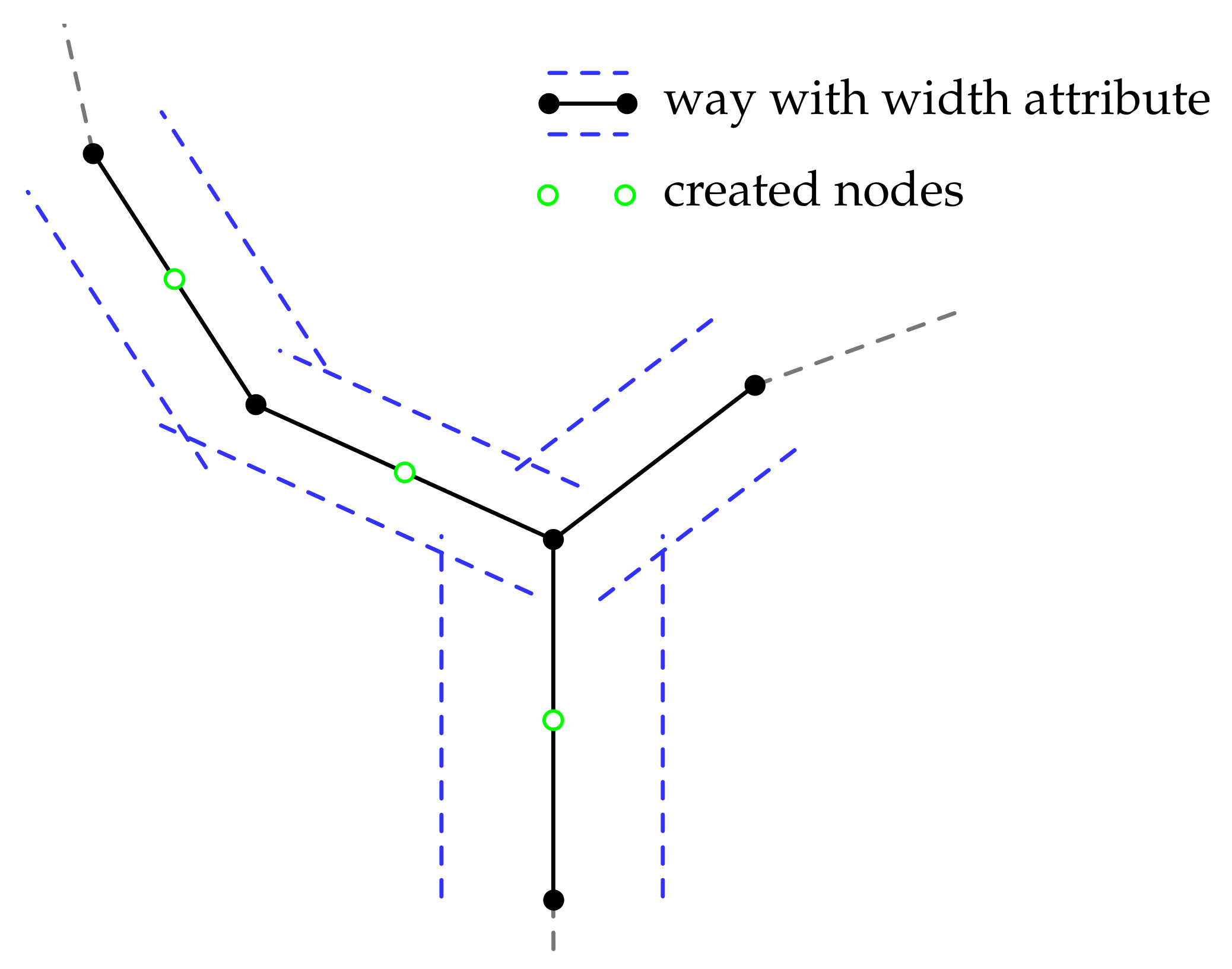
2.4. Interpolation
2.5. Creating the Set of Parallel Paths
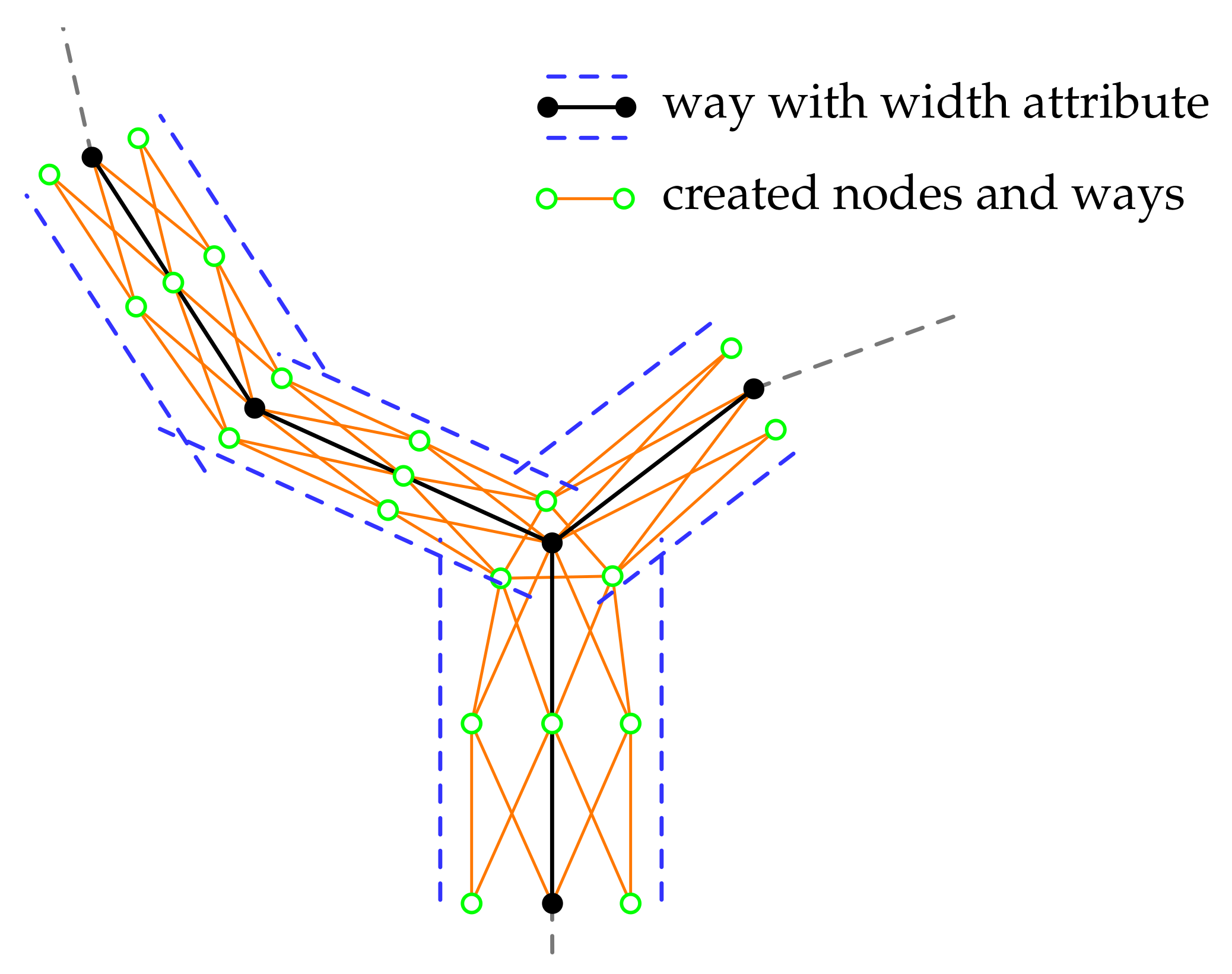
2.6. Meshing the Grid
- 1.
- Nodes shall not be connected with those nodes from which they were generated
- 2.
- Nodes at the end of ways (e.g., entrances) do not generate new nodes
- 3.
- Ways with a width less than a threshold are not represented by three ways
| Listing 2. Ouput data format. |
| <nodelist name = ‘lohmuehlenpark’ version = ‘0.1’> <node id = ‘8596122144’ lat = ‘53.5571622’ lon=’10.0207811’> <curb>0.1</curb> <nd ref = ‘8596122143’> <highway>footway</highway> <surface>paving_stones</surface> <sgd_width>3.0</sgd_width> </nd> <nd ref = ‘8596122145’> <highway>footway</highway> <surface>paving_stones</surface> <sgd_width>2.5</sgd_width> </nd> </node> <node id = ‘8596122143’ lat = ‘53.5570256’ lon = ‘10.0207442’> <barrier>bollard</barrier> <nd ref = ‘8596122144’> <highway>footway</highway> <surface>paving_stones</surface> <sgd_width>3.0</sgd_width> </nd> </node> </nodelist> |
3. Path Planning on the Autonomous Vehicle
3.1. Cost to Current Node and Heuristic
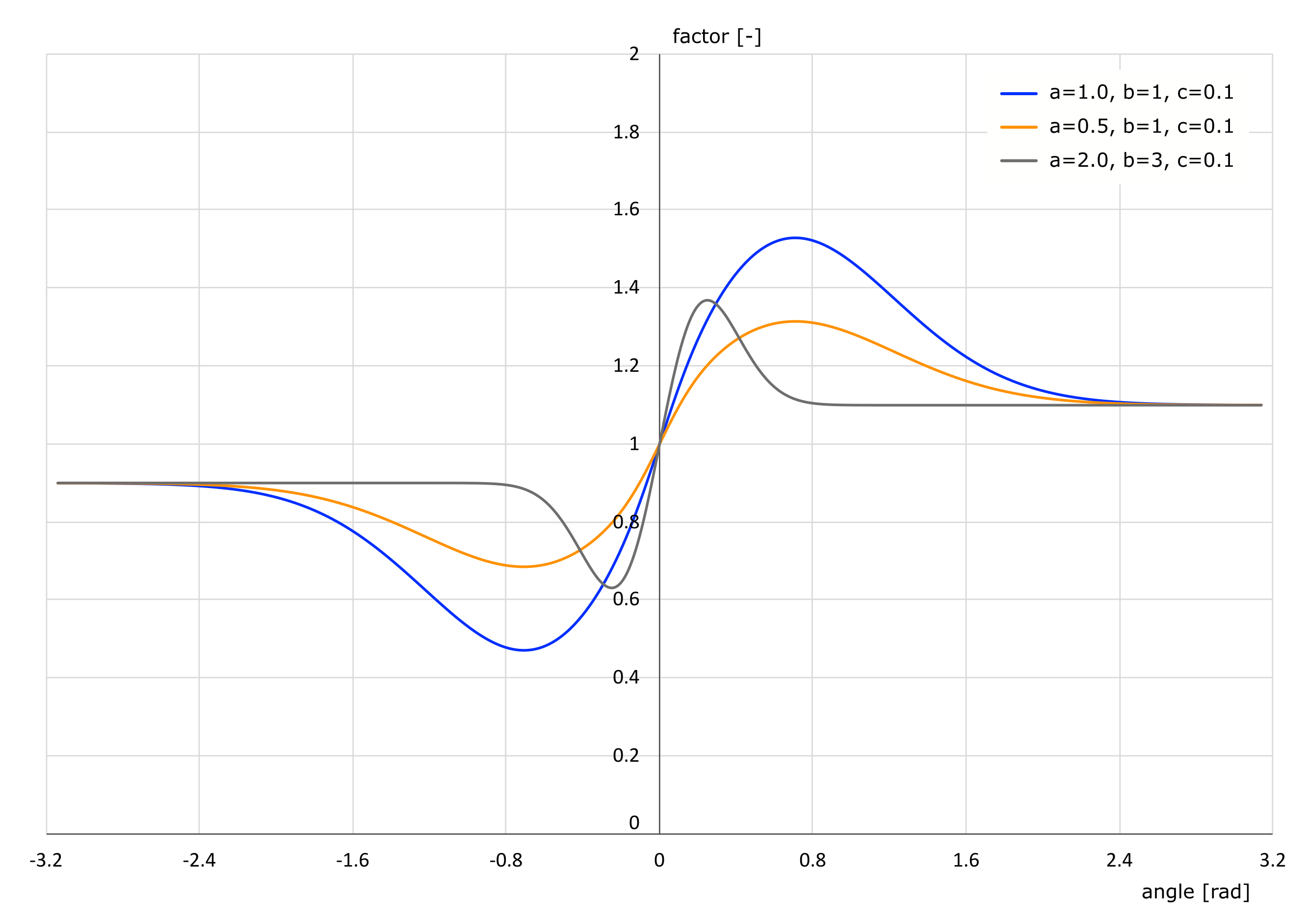
3.2. Development of a Cost Function
| Listing 3. Mapping of OpenStreetMap attributes to costs. |
| <users> <user name = ‘default’> <surface> <asphalt>1</asphalt> <paving_stones>1.2</paving_stones> <compacted>1.5</compacted> <gravel>2.0</gravel> <cobblestone>4.0</cobblestone> <sand>5.0</sand> </surface> <way> <footway>1.0</footway> <service>1.5</service> <living_street>2.0</living_street> <residential>5.0</residential> <steps>1e6</steps> </way> <slope>1.0</slope> </user> </users> |
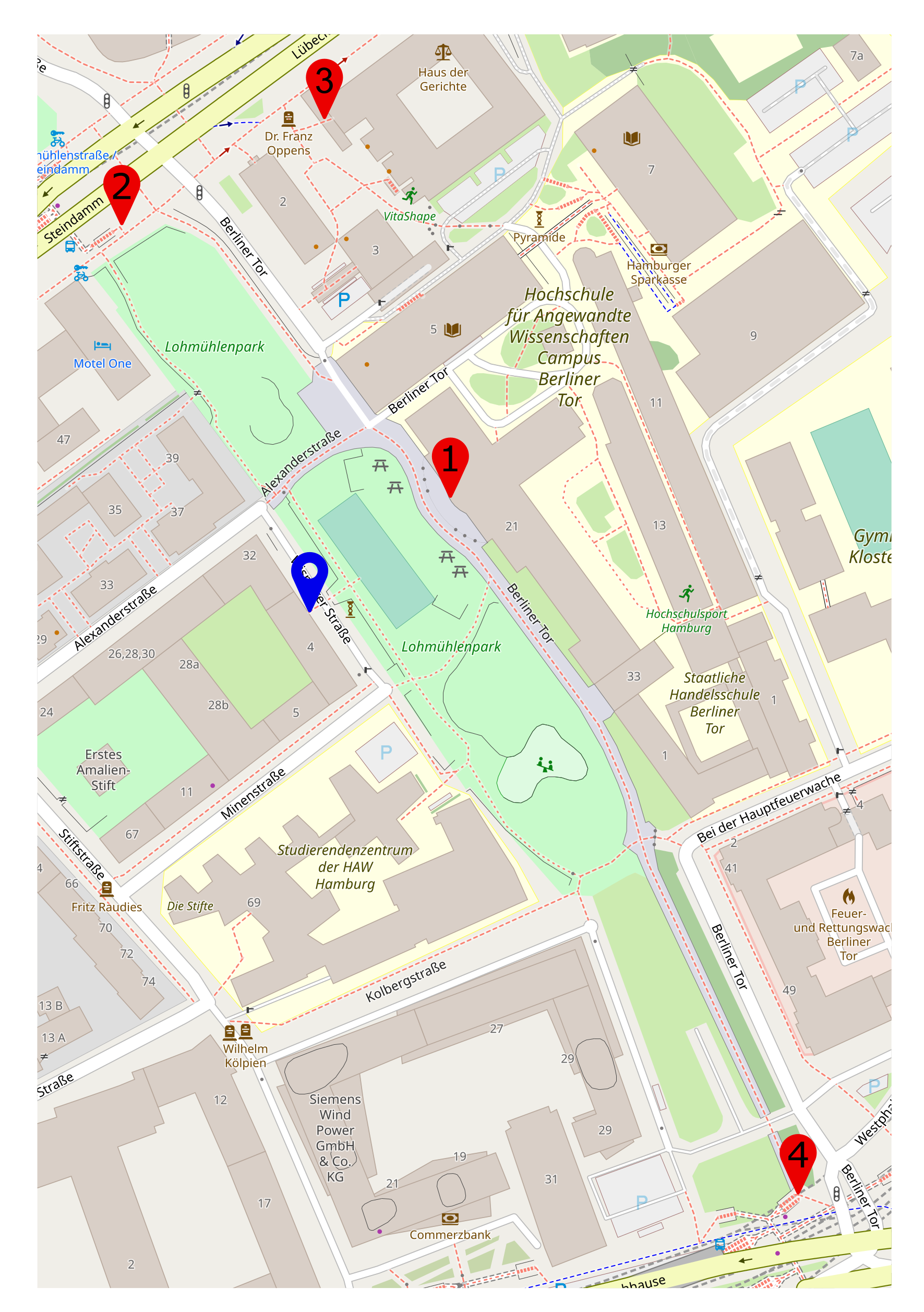
4. Example and Evaluation
4.1. Augmentation, Interpolation and Meshing
4.2. Cost Function and Direction Function
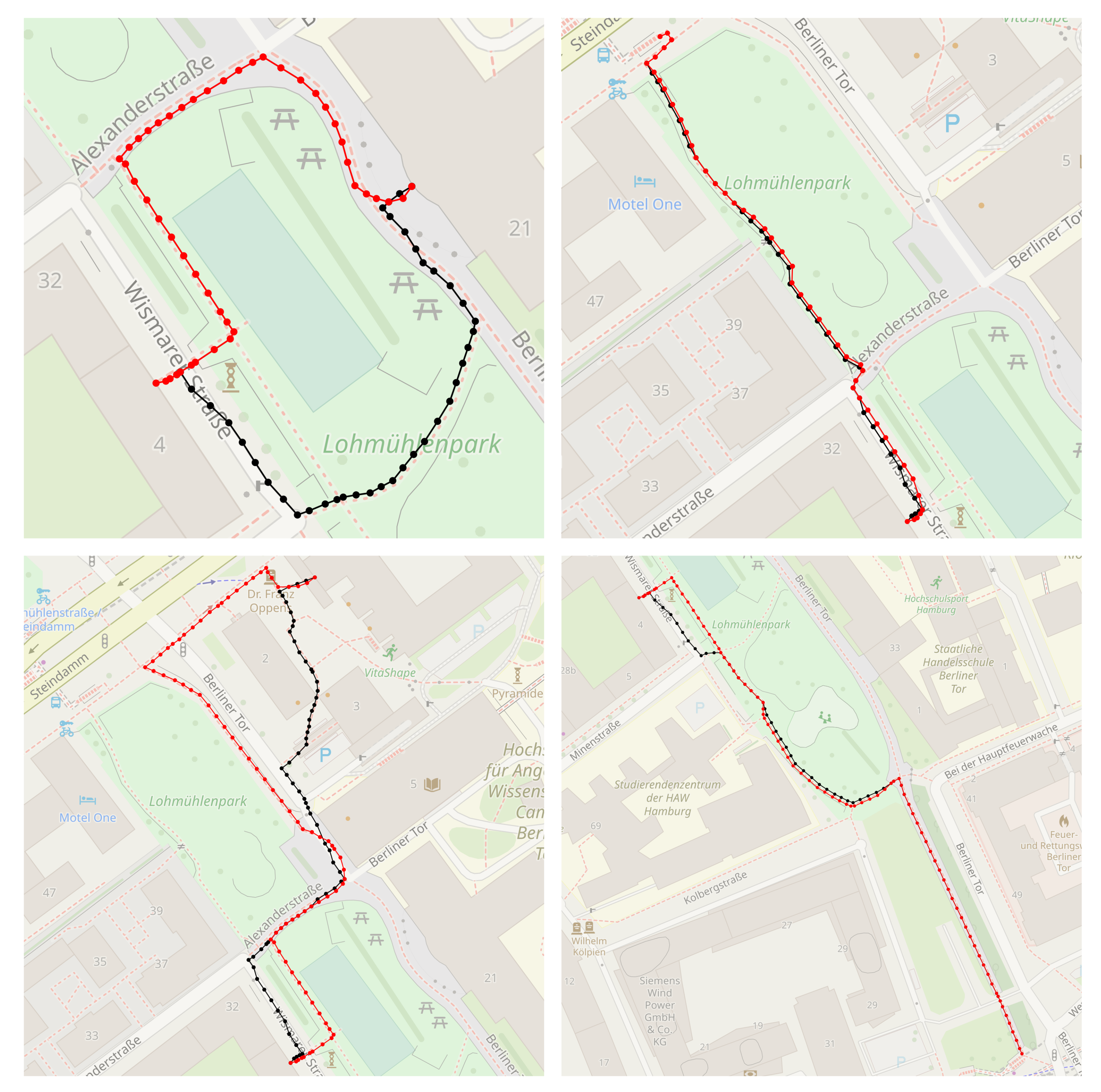
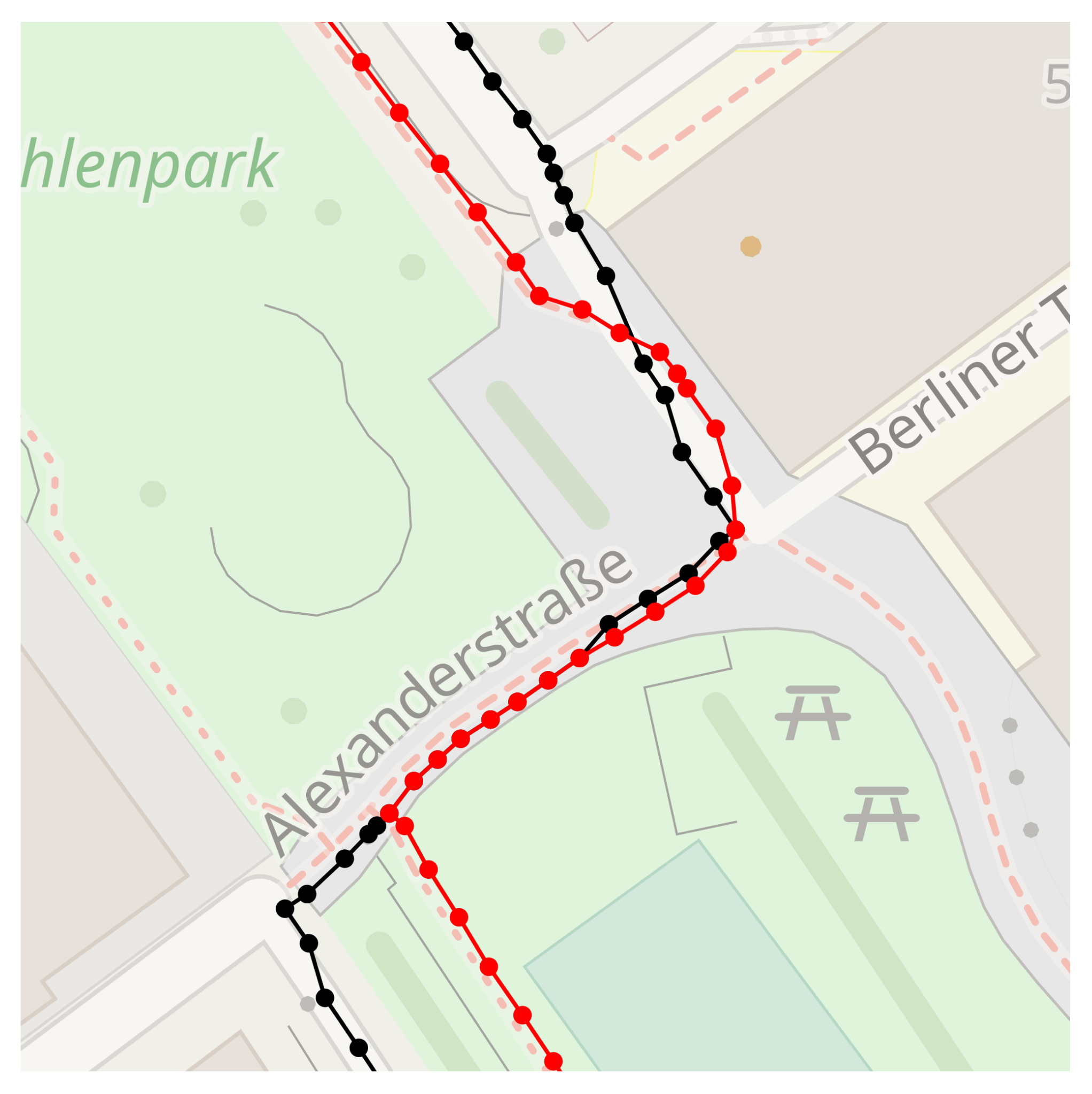
4.3. Path Finding and Obstacle Avoidance
4.4. Comparison
5. Discussion
6. Conclusions
Further Work
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| OSM | OpenStreetMap |
| SGD | Shared guide dog |
| WGS84 | World geodetic system 1984 |
References
- Bashkanov, O.; Seidel, M.; Yakymets, M.; Daupayev, N.; Sharonov, Y.; Assmann, T.; Schmidt, S.; Zug, S. Exploiting OpenStreetMap-Data for Outdoor Robotic Applications. In Proceedings of the 2019 IEEE International Symposium on Robotic and Sensors Environments (ROSE), Ottawa, ON, Canada, 17–18 June 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–7. [Google Scholar] [CrossRef]
- Floros, G.; van der Zander, B.; Leibe, B. OpenStreetSLAM: Global Vehicle Localization Using OpenStreetMaps. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013. [Google Scholar]
- Hentschel, M.; Wagner, B. Autonomous robot navigation based on OpenStreetMap geodata. In Proceedings of the 13th International IEEE Conference on Intelligent Transportation Systems, Funchal, Portugal, 19–22 September 2010; pp. 1645–1650. [Google Scholar] [CrossRef]
- Suger, B.; Burgard, W. Global outer-urban navigation with OpenStreetMap. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 1417–1422. [Google Scholar] [CrossRef]
- Blinden- und Sehbehindertenverein Hamburg e.V. Home Page. Available online: https://www.bsvh.org/ (accessed on 13 April 2023).
- de Verdier, K.; Ulla, E.; Löfgren, S.; Fernell, E. Children with blindness – major causes, developmental outcomes and implications for habilitation and educational support: A two-decade, Swedish population-based study. Acta Ophthalmol. 2018, 96, 295–300. [Google Scholar] [CrossRef] [PubMed]
- Help People Who Are Blind or Partially Sighted—OrCam Home Page. 2022. Available online: https://www.orcam.com/en/ (accessed on 3 November 2022).
- Routago Assist Home Page. Available online: https://www.routago.de/ (accessed on 3 November 2022).
- HERE Technologies|The world’s #1 location platform Home Page. Available online: https://www.here.com/ (accessed on 13 March 2023).
- TomTom GPS-Traffic Alerts, Maps, & Apps Home Page. Available online: https://www.tomtom.com/en_us/navigation/ (accessed on 13 March 2023).
- Hamburger Hochbahn AG—The HEAT Project. Available online: https://www.hochbahn.de/en/projects/the-heat-project (accessed on 13 April 2023).
- Main Page—OpenStreetMap Wiki. Available online: https://wiki.openstreetmap.org/w/index.php?title=Main_Page&oldid=2301410 (accessed on 13 March 2023).
- OpenStreetMap Stats. Available online: https://planet.openstreetmap.org/statistics/data_stats.html (accessed on 13 March 2023).
- Organised Editing Teams—OpenStreetMap Wiki. Available online: https://wiki.openstreetmap.org/w/index.php?title=Category:Organised_Editing_Teams&oldid=2455286 (accessed on 13 March 2023).
- Mobasheri, A.; Sun, Y.; Loos, L.; Ali, A.L. Are Crowdsourced Datasets Suitable for Specialized Routing Services? Case Study of OpenStreetMap for Routing of People with Limited Mobility. Sustainability 2017, 9, 997. [Google Scholar] [CrossRef]
- Ding, C.; Wald, M.; Wills, G. A Survey of Open Accessibility Data. In Proceedings of the 11th Web for All Conference (W4A’14), New York, NY, USA, 7 April 2014. [Google Scholar] [CrossRef]
- Neis, P.; Zielstra, D. Recent Developments and Future Trends in Volunteered Geographic Information Research: The Case of OpenStreetMap. Future Internet 2014, 6, 76–106. [Google Scholar] [CrossRef]
- Fahnenschreiber, S.; Gündling, F.; Weihe, K. Per Pedes Routing; Technical Report; Technische Universität Darmstadt: Darmstadt, Germany, 2019. [Google Scholar]
- Damian, I.; Ionita, A.D.; Anton, S.O. Community- and Data-Driven Services for Multi-Policy Pedestrian Routing. Sensors 2022, 22, 4515. [Google Scholar] [CrossRef] [PubMed]
- Cohen, A.; Dalyot, S. Route planning for blind pedestrians using OpenStreetMap. Environ. Plan. B Urban Anal. City Sci. 2021, 48, 1511–1526. [Google Scholar] [CrossRef]
- Opach, T.; Navarra, C.; Rød, J.K.; Neset, T.S. Pedestrian Routing and Perspectives: WayFinder’s Route down the Lane—Come on with the Rain. ISPRS Int. J. Geo-Inf. 2021, 10, 365. [Google Scholar] [CrossRef]
- Rösmann, C.; Hoffmann, F.; Bertram, T. Integrated online trajectory planning and optimization in distinctive topologies. Robot. Auton. Syst. 2017, 88, 142–153. [Google Scholar] [CrossRef]
- Elements—OpenStreetMap Wiki. Available online: https://wiki.openstreetmap.org/w/index.php?title=Elements&oldid=2459386 (accessed on 13 March 2023).
- JOSM—OpenStreetMap Wiki. Available online: https://wiki.openstreetmap.org/w/index.php?title=JOSM&oldid=2486812 (accessed on 13 March 2023).
- Quality Assurance—OpenStreetMap Wiki. Available online: https://wiki.openstreetmap.org/w/index.php?title=Quality_assurance&oldid=2492612 (accessed on 13 April 2023).
- OpenStreetMap Blog—The Best World Map for Accessibility. Available online: https://blog.openstreetmap.org/2020/12/02/the-best-world-map-for-accessibility/ (accessed on 13 April 2023).
- OSM for the Blind. Available online: https://wiki.openstreetmap.org/wiki/OSM_for_the_blind (accessed on 3 November 2022).
- 19157:2013; Geographic Information—Data Quality. International Organization for Standardization: Geneva, Switzerland, 2013.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Criterion | Description | Rating |
|---|---|---|
| Completeness | Completeness of features, attributes, and relations | good |
| Logical consistency | Rules of the data set were observed | good |
| Positional accuracy | Deviation from the real geographical position | very good |
| Thematic accuracy | Correctness of attributes and classification of features | good |
| Temporal quality | Representation of the current status | very good |
| Usability | Applicability for the project | very good |
| Attribute | Value |
|---|---|
| paving_stones | 1.2 |
| service | 1.5 |
| hazard | 1 |
| length | 6.0 |
| Route | Standard A* Length | Modified A* Length | Difference |
|---|---|---|---|
| Route 1 | 139.658 | 146.196 | 4.7% |
| Route 2 | 175.713 | 176.897 | 0.7% |
| Route 3 | 229.871 | 291.801 | 26.9% |
| Route 4 | 313.745 | 323.633 | 3.2% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stahr, P.; Maaß, J.; Gärtner, H. Application of Path Planning for a Mobile Robot Assistance System Based on OpenStreetMap Data. Robotics 2023, 12, 113. https://doi.org/10.3390/robotics12040113
Stahr P, Maaß J, Gärtner H. Application of Path Planning for a Mobile Robot Assistance System Based on OpenStreetMap Data. Robotics. 2023; 12(4):113. https://doi.org/10.3390/robotics12040113
Chicago/Turabian StyleStahr, Pascal, Jochen Maaß, and Henner Gärtner. 2023. "Application of Path Planning for a Mobile Robot Assistance System Based on OpenStreetMap Data" Robotics 12, no. 4: 113. https://doi.org/10.3390/robotics12040113
APA StyleStahr, P., Maaß, J., & Gärtner, H. (2023). Application of Path Planning for a Mobile Robot Assistance System Based on OpenStreetMap Data. Robotics, 12(4), 113. https://doi.org/10.3390/robotics12040113