
Remote Operation of CeCi Social Robot

 , , ,
, , ,  and
and 
Abstract
1. Introduction
1.1. Remote Operation
1.2. Social Robots
- Contains the performance parameters of the system.
- Identifies the limitations of the system agents and environment.
- Has predictive power to know the scope of the application.
1.3. Technology Solutions
2. Materials and Methods
2.1. Robot CeCi
2.2. ROS-Mobile
- Starting Screen: allows the creation of several control screens.
- Master: wireless connection configuration with the robot.
- Viz: controls and labels configured in the Details tab.
- Details: allow different controls and labels in the Viz tab.
- SSH: allow it to connect using the SSH connection protocol.
2.3. Creation of the Interface between Mobile Device and CeCi Robot
- 1.
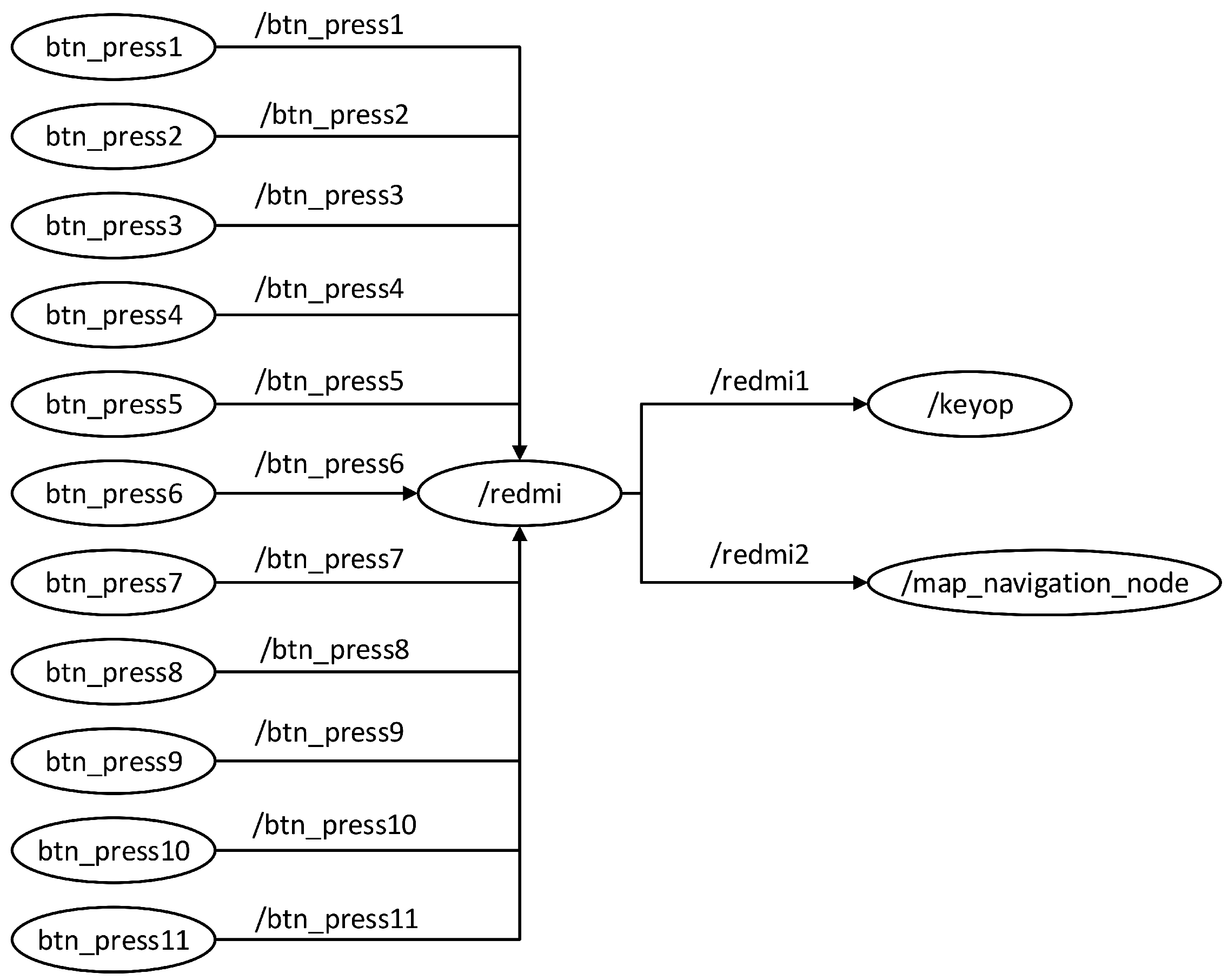
- Ability to subscribe to the /keyop node, which allows for controlling the robot’s movements. Messages between the /redmi node and the /keyop node are transmitted via the /redmi1 topic.
- 2.
- Ability to subscribe to the /map_navigation_node navigation node, which enables navigation in environments known to the robot. The communication between the /redmi node and the /map_navigation_node is transmitted through the /redmi2 topic, as seen in Figure 3.
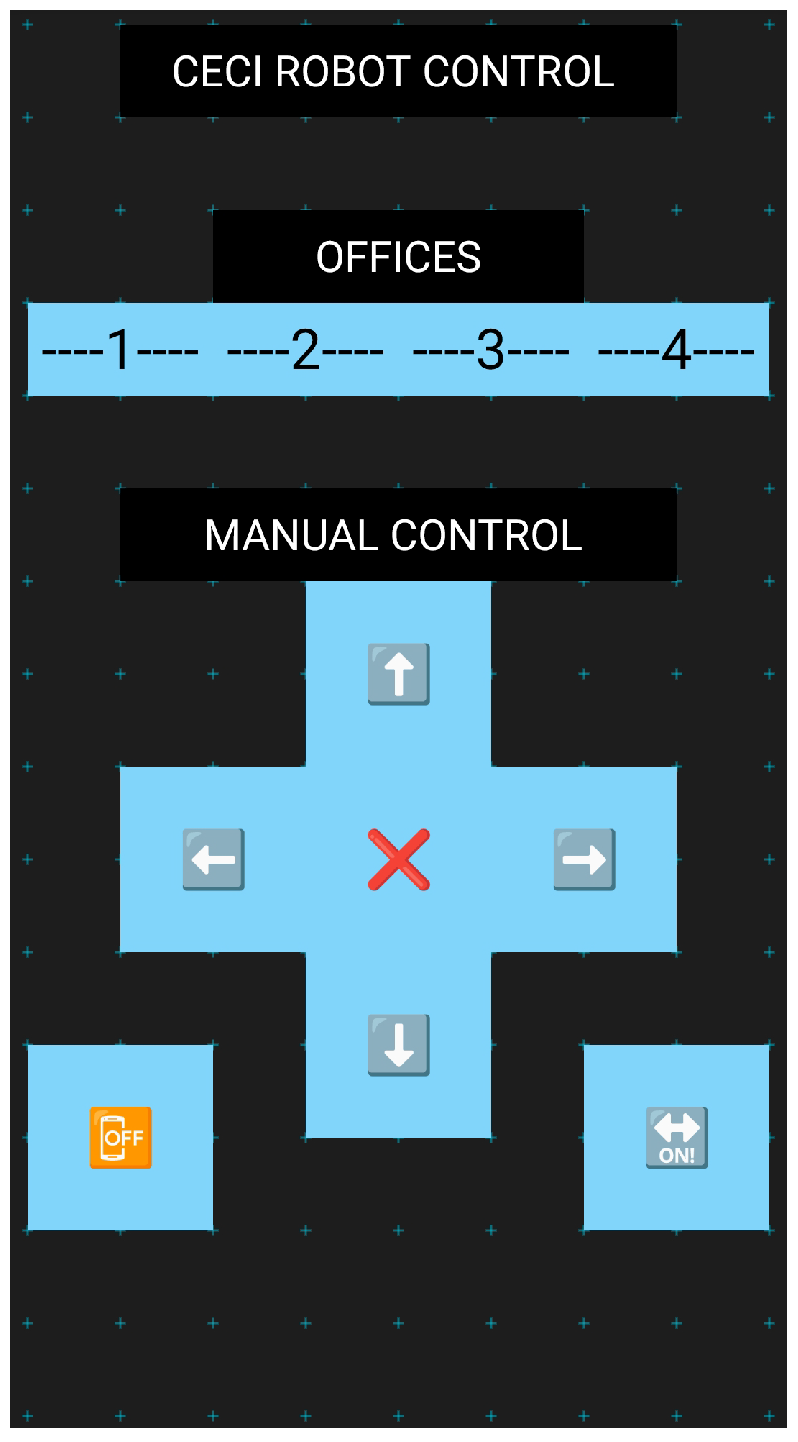
2.4. Customizing the CeCi Robot Control Application
- 1.
- First, an identifying name is given to the new configuration to be made. Then, the buttons are added as widgets, according to the needs of the application. Next, within each button created, the location (x-y coordinates) and the size of the buttons are configured to improve the appearance and functionality of the interface.
- 2.
- Each button behaves as a node in ROS; the next step is configuring the buttons as publishing nodes. To do this, the programming was edited based on the button name. A name type was placed on each button to identify it in any part of the process, be it programming or visualization.
- 3.
- Finally, the identification parameters corresponding to the IP addresses of both the robot to be controlled and the mobile device that will manipulate the application are entered. For this step to be carried out and for the application to work, the robot and the mobile device must be connected to the same Wi-Fi network. In addition, the master port of the robot is set, which in this case is 11311.
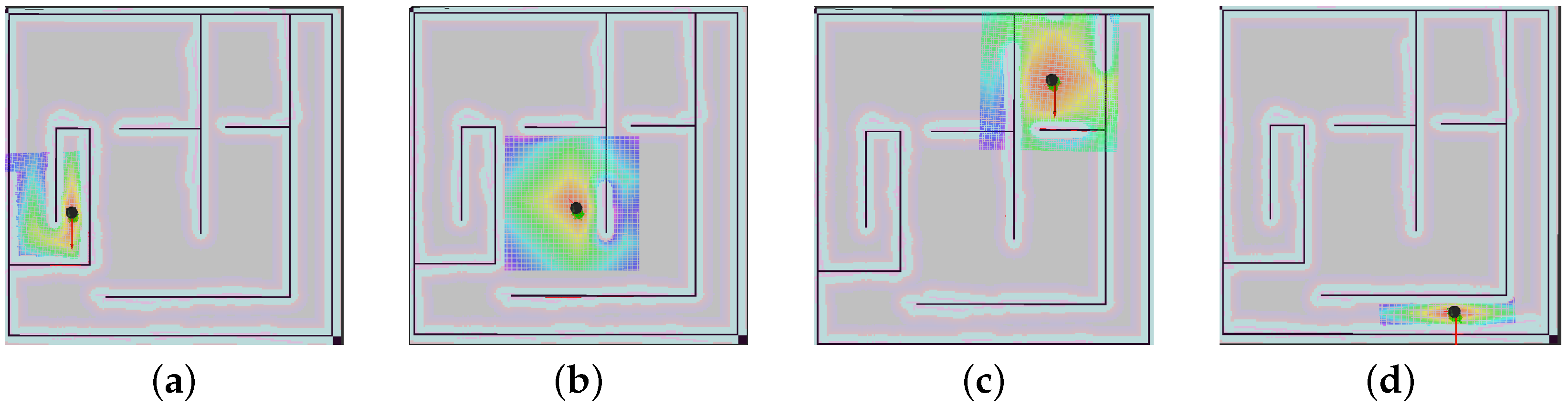
2.5. Project Simulation
2.6. Tests with the CeCi Robot
2.7. Application Usability
- 1.
- Does the robot execute the orders given by you from the application?
- 2.
- Were the robot’s responses to the orders from the application correct?
- 3.
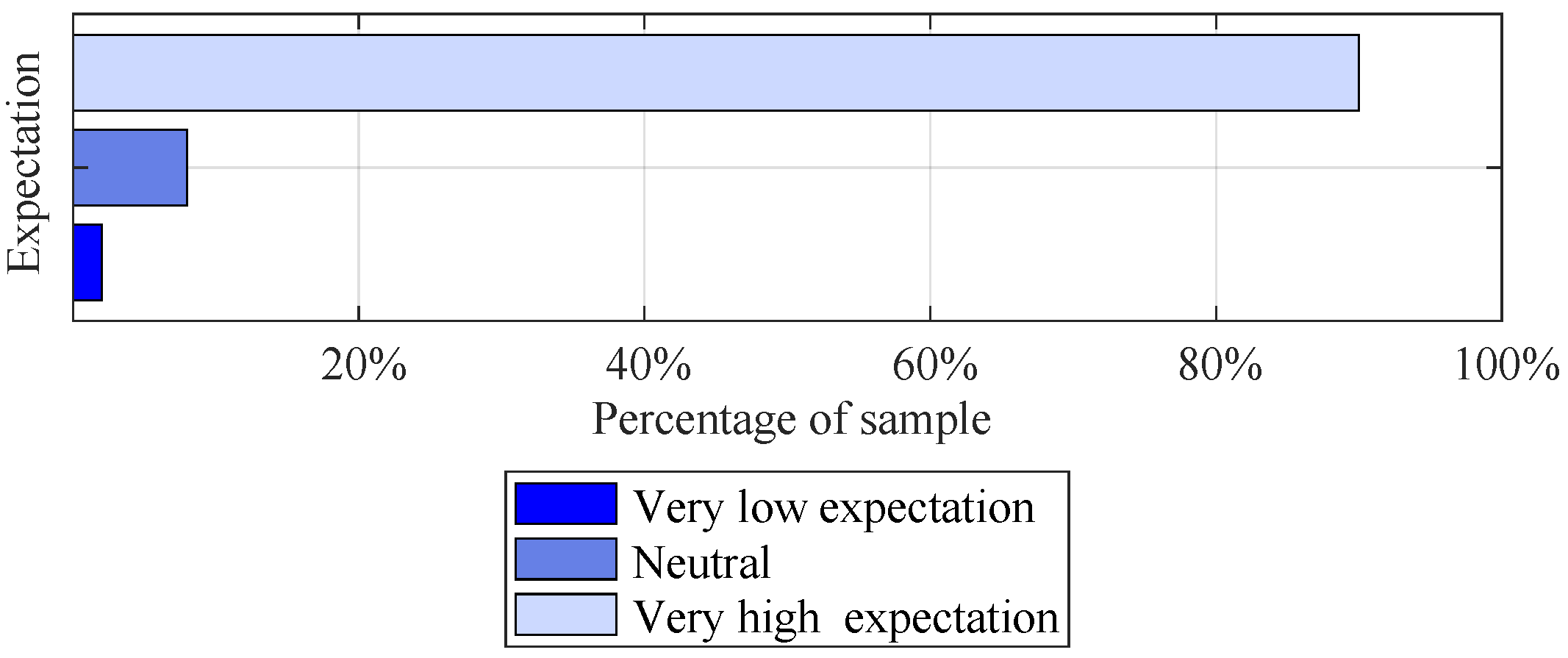
- Did the application performance meet your expectations?
- 4.
- Would you learn to use the application for yourself?
- 5.
- Do you think you could use the app again without prior explanation?
- 6.
- After testing the app, what’s your opinion about using it as a remote control for the robot?
- 7.
- Do you remember the existing buttons in the application and their use?
- 8.
- After testing the app, what is your opinion about it?
- 9.
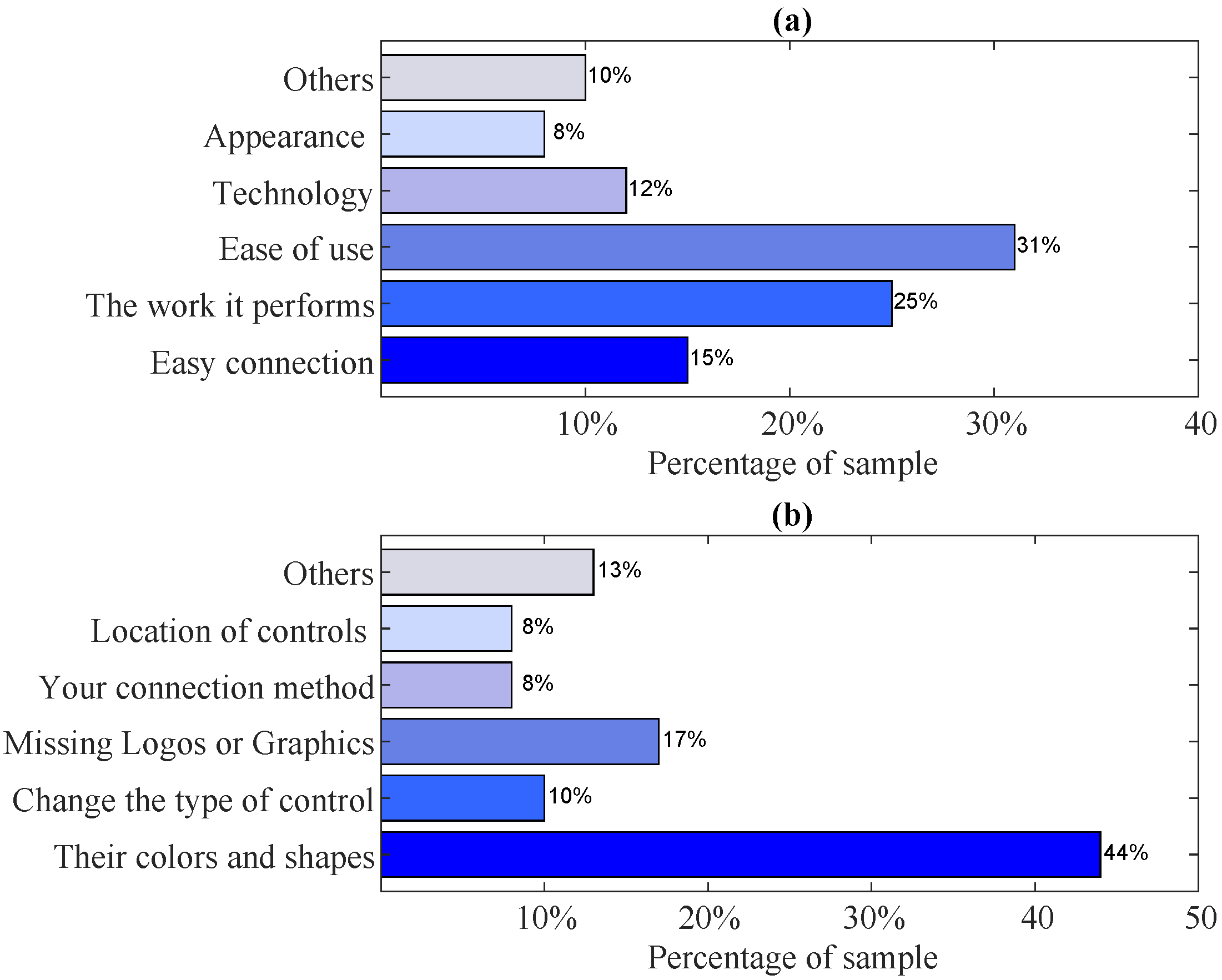
- What do you like most about the app?
- 10.
- What do you like least about the app?
3. Results
3.1. Connection Test with Different Devices
3.2. User Survey
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CIITT | Center for Research, Innovation and Technology Transfer |
| MVVM | Model–view–viewmodel |
| PACMAD | People at the Center of Mobile Application Development |
| RAT | Robot Assisted Therapy |
| ROS | Robot Operating System |
References
- Kulakov, F.; Alferov, G.; Efimova, P. Methods of remote control over space robots. In Proceedings of the 2015 International Conference on Mechanics-Seventh Polyakhov’s Reading, St. Petersburg, Russia, 2–6 February 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Vasey, E.; FakhrHosseini, M.S.; Zheng, Z.; Park, C.H.; Howard, A.; Jeon, M. Development and usability testing of a remote control app for an interactive robot. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting, Austin, TX, USA, 9–13 October 2017; SAGE Publications Sage CA: Los Angeles, CA, USA, 2017; Volume 61, pp. 808–812. [Google Scholar]
- García, D.H.; Esteban, P.G.; Lee, H.R.; Romeo, M.; Senft, E.; Billing, E. Social Robots in Therapy and Care. In Proceedings of the 2019 14th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Daegu, Republic of Korea, 11–14 March 2019; pp. 669–670. [Google Scholar] [CrossRef]
- Broadbent, E. Interactions with robots: The truths we reveal about ourselves. Annu. Rev. Psychol. 2017, 68, 627–652. [Google Scholar] [CrossRef] [PubMed]
- Banjanovic-Mehmedovic, L.; Karabegovic, I.; Jahic, J.; Omercic, M. Optimal path planning of a disinfection mobile robot against COVID-19 in a ROS-based research platform. In Proceedings of the Conference on Automation Science and Engineering (CASE), Lyon, France, 23–27 August 2021; Volume 2147, p. 2152. [Google Scholar]
- Kim, H.; So, K.K.F.; Wirtz, J. Service robots: Applying social exchange theory to better understand human–robot interactions. Tour. Manag. 2022, 92, 104537. [Google Scholar] [CrossRef]
- Aymerich-Franch, L.; Ferrer, I. Liaison, safeguard, and well-being: Analyzing the role of social robots during the COVID-19 pandemic. Technol. Soc. 2022, 70, 101993. [Google Scholar] [CrossRef] [PubMed]
- Alka, N.; Salihu, A.; Haruna, Y.; Dalyop, I. A voice controlled pick and place robotic arm vehicle using android application. Am. J. Eng. Res. AJER 2017, 6, 207–215. [Google Scholar]
- Reddy, A.H.; Kalyan, B.; Murthy, C.S. Mine rescue robot system—A review. Procedia Earth Planet. Sci. 2015, 11, 457–462. [Google Scholar] [CrossRef]
- Montero, R.; Victores, J.G.; Martinez, S.; Jardón, A.; Balaguer, C. Past, present and future of robotic tunnel inspection. Autom. Constr. 2015, 59, 99–112. [Google Scholar] [CrossRef]
- Patel, K.; Pancholi, B.K. A novel fire extinguishing robotic vehicle controlled by android application. In Proceedings of the 2017 IEEE International Conference on Smart Technologies and Management for Computing, Communication, Controls, Energy and Materials (ICSTM), Chennai, India, 2–4 August 2017; pp. 417–422. [Google Scholar] [CrossRef]
- Ha, Q.; Yen, L.; Balaguer, C. Robotic autonomous systems for earthmoving in military applications. Autom. Constr. 2019, 107, 102934. [Google Scholar] [CrossRef]
- Yang, G.; Lv, H.; Zhang, Z.; Yang, L.; Deng, J.; You, S.; Du, J.; Yang, H. Keep healthcare workers safe: Application of teleoperated robot in isolation ward for COVID-19 prevention and control. Chin. J. Mech. Eng. 2020, 33, 1–4. [Google Scholar] [CrossRef]
- Kristoffersson, A.; Coradeschi, S.; Loutfi, A. A review of mobile robotic telepresence. Adv. Hum.-Comput. Interact. 2013, 2013. [Google Scholar] [CrossRef]
- Gil, Ó.; Garrell, A.; Sanfeliu, A. Social Robot Navigation Tasks: Combining Machine Learning Techniques and Social Force Model. Sensors 2021, 21, 7087. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.Y.; Lin, W.M.; Chen, A.X. Path Planning for the Mobile Robot: A Review. Symmetry 2018, 10, 450. [Google Scholar] [CrossRef]
- Ugalde Pereira, F.; Medeiros de Assis Brasil, P.; de Souza Leite Cuadros, M.A.; Cukla, A.R.; Drews Junior, P.; Tello Gamarra, D.F. Analysis of Local Trajectory Planners for Mobile Robot with Robot Operating System. IEEE Lat. Am. Trans. 2021, 20, 92–99. [Google Scholar] [CrossRef]
- Westlund, J.K.; Lee, J.J.; Plummer, L.; Faridi, F.; Gray, J.; Berlin, M.; Quintus-Bosz, H.; Hartmann, R.; Hess, M.; Dyer, S.; et al. Tega: A social robot. In Proceedings of the 2016 11th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Christchurch, New Zealand, 7–10 March 2016; p. 561. [Google Scholar] [CrossRef]
- Masaki, R.; Kobayashi, M.; Motoi, N. Remote-Controlled Method with Force and Visual Assists Based on Time to Collision for Mobile Robot. Appl. Sci. 2022, 12, 3727. [Google Scholar] [CrossRef]
- Azizi, M.R.; Rastegarpanah, A.; Stolkin, R. Motion planning and control of an omnidirectional mobile robot in dynamic environments. Robotics 2021, 10, 48. [Google Scholar] [CrossRef]
- Pavlic, T.; Kušec, K.; Radočaj, D.; Britvić, A.; Lukas, M.; Milić, V.; Crneković, M. Cognitive Model of the Closed Environment of a Mobile Robot Based on Measurements. Appl. Sci. 2021, 11, 2786. [Google Scholar] [CrossRef]
- Liu, H.; Wang, L. Remote human–robot collaboration: A cyber–physical system application for hazard manufacturing environment. J. Manuf. Syst. 2020, 54, 24–34. [Google Scholar] [CrossRef]
- Gong, L.; Gong, C.; Ma, Z.; Zhao, L.; Wang, Z.; Li, X.; Jing, X.; Yang, H.; Liu, C. Real-time human-in-the-loop remote control for a life-size traffic police robot with multiple augmented reality aided display terminals. In Proceedings of the 2017 2nd International Conference on Advanced Robotics and Mechatronics (ICARM), Hefei, China, 27–31 August 2017; pp. 420–425. [Google Scholar] [CrossRef]
- Muñoz Peña, K.; Bacca Cortés, B. GUI3DXBot: An Interactive Software Tool for a Tour-Guide Mobile Robot. Cienc. E Ing. Neogranadina 2020, 30, 59–74. [Google Scholar] [CrossRef]
- Flores-Vázquez, C.; Bahon, C.A.; Icaza, D.; Cobos-Torres, J.C. Developing a Socially-Aware Robot Assistant for Delivery Tasks. In Proceedings of the International Conference on Applied Technologies, Quito, Ecuador, 3–5 December 2019; Springer: Berlin/Heidelberg, Germany, 2019; pp. 531–545. [Google Scholar]
- Pujari, S.S.; Patil, M.S.; Ingleshwar, S.S. Remotely controlled autonomous robot using Android application. In Proceedings of the 2017 International Conference on I-SMAC (IoT in Social, Mobile, Analytics and Cloud) (I-SMAC), Palladam, India, 10–11 February 2017; pp. 588–593. [Google Scholar] [CrossRef]
- Bualat, M.; Barlow, J.; Fong, T.; Provencher, C.; Smith, T. Astrobee: Developing a free-flying robot for the international space station. In Proceedings of the AIAA SPACE 2015 Conference and Exposition, Pasadena, CA, USA, 31 August–2 September 2015; p. 4643. [Google Scholar]
- Škulj, G.; Vrabič, R.; Podržaj, P. A Wearable IMU System for Flexible Teleoperation of a Collaborative Industrial Robot. Sensors 2021, 21, 5871. [Google Scholar] [CrossRef] [PubMed]
- Young, J.E.; Hawkins, R.; Sharlin, E.; Igarashi, T. Toward acceptable domestic robots: Applying insights from social psychology. Int. J. Soc. Robot. 2009, 1, 95–108. [Google Scholar] [CrossRef]
- Koceski, S.; Koceska, N. Evaluation of an assistive telepresence robot for elderly healthcare. J. Med. Syst. 2016, 40, 1–7. [Google Scholar] [CrossRef]
- Flores-Vázquez, C.; Angulo, C.; Vallejo-Ramírez, D.; Icaza, D.; Pulla Galindo, S. Technical Development of the CeCi Social Robot. Sensors 2022, 22, 7619. [Google Scholar] [CrossRef] [PubMed]
- Chiang, A.H.; Trimi, S. Impacts of service robots on service quality. Serv. Bus. 2020, 14, 439–459. [Google Scholar] [CrossRef]
- Crandall, J.W.; Cummings, M.L. Identifying predictive metrics for supervisory control of multiple robots. IEEE Trans. Robot. 2007, 23, 942–951. [Google Scholar] [CrossRef]
- Cam, N.T.; Nguyen, T.; Nguyen, K.; Nguyen, T.; Pham, V.H. Detect Malware in Android Firmware Based on Distributed Network Environment. In Proceedings of the 2019 IEEE 19th International Conference on Communication Technology (ICCT), Xi’an, China, 16–19 October 2019; pp. 1566–1570. [Google Scholar] [CrossRef]
- Flores-Vázquez, C.; Rojas de Silva, F.; Trejo Ramírez, K.A. Operación remota de un robot móvil usando un teléfono inteligente. Ingenius Rev. Cienc. Y Tecnología 2017, 17, 29–35. [Google Scholar] [CrossRef]
- Papcun, P.; Zolotova, I.; Tafsi, K. Control and Teleoperation of Robot Khepera via Android Mobile Device through Bluetooth and WiFi. IFAC-PapersOnLine 2016, 49, 188–193. [Google Scholar] [CrossRef]
- Hong, S.; Hwang, Y. Design and implementation for iort based remote control robot using block-based programming. Issues Inf. Syst. 2020, 21, 317–330. [Google Scholar]
- Barbosa, J.P.d.A.; Lima, F.d.P.d.C.; Coutinho, L.d.S.; Leite, J.P.R.R.; Machado, J.B.; Valerio, C.H.; Bastos, G.S. ROS, Android and cloud robotics: How to make a powerful low cost robot. In Proceedings of the 2015 International Conference on Advanced Robotics (ICAR), Istanbul, Turkey, 27–31 July 2015; pp. 158–163. [Google Scholar] [CrossRef]
- Kiryanov, D.; Lavrenov, R. Remote Control Application for’Servosila Engineer’on Android Mobile Devices. In Proceedings of the International Conference on Artificial Life and Robotics, Oita, Japan, 13–16 January 2020; Volume 25, pp. 440–443. [Google Scholar]
- Fahmidur, R.K.; Munaim, H.M.A.; Tanvir, S.M.; Sayem, A.S. Internet controlled robot: A simple approach. In Proceedings of the 2016 International Conference on Electrical, Electronics, and Optimization Techniques (ICEEOT), Chennai, India, 3–5 March 2016; pp. 1190–1194. [Google Scholar] [CrossRef]
- Chakraborty, D.; Sharma, K.; Roy, R.K.; Singh, H.; Bezboruah, T. Android application based monitoring and controlling of movement of a remotely controlled robotic car mounted with various sensors via Bluetooth. In Proceedings of the 2016 International Conference on Advances in Electrical, Electronic and Systems Engineering (ICAEES), Putrajaya, Malaysia, 14–16 November 2016; pp. 170–175. [Google Scholar] [CrossRef]
- Szymańska, E.; Petrović, L.; Marković, I.; Petrović, I. Mobile Robot Teleoperation via Android Mobile Device with UDP Communication. In Proceedings of the 2021 44th International Convention on Information, Communication and Electronic Technology (MIPRO), Opatija, Croatia, 27 September–1 October 2021; pp. 1143–1148. [Google Scholar]
- Huang, K.; Sun, Y.; Hao, M.; Yang, J.; Xia, Z.; Li, X.; Chen, Y. Researches on A Tele-operated Robot Based on Wi-Fi. In Proceedings of the 2019 IEEE 3rd Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chengdu, China, 15–17 March 2019; pp. 648–651. [Google Scholar] [CrossRef]
- Weichbroth, P. Usability of Mobile Applications: A Systematic Literature Study. IEEE Access 2020, 8, 55563–55577. [Google Scholar] [CrossRef]
- De Cubber, G.; Doroftei, D.; Balta, H.; Matos, A.; Silva, E.; Serrano, D.; Govindaraj, S.; Roda, R.; Lobo, V.; Marques, M.; et al. Operational validation of search and rescue robots. In Search and Rescue Robotics-From Theory to Practice; InTech: Rijeka, Italy, 2017. [Google Scholar]
- Moniruzzaman, M.; Rassau, A.; Chai, D.; Islam, S.M.S. Teleoperation methods and enhancement techniques for mobile robots: A comprehensive survey. Robot. Auton. Syst. 2022, 150, 103973. [Google Scholar] [CrossRef]
- Priyandoko, G.; Wei, C.K.; Achmad, M.S.H. Human following on ros framework a mobile robot. Sinergi 2018, 22, 77–82. [Google Scholar] [CrossRef]
- Mishra, R.; Javed, A. ROS based service robot platform. In Proceedings of the 2018 4th International Conference on Control, Automation and Robotics (ICCAR), Auckland, New Zealand, 20–23 April 2018; pp. 55–59. [Google Scholar] [CrossRef]
- Ponomarev, D.A.; Kuzmina, T.O.; Stotckaia, A.D. Real-time Control System for a Tracked Robot. In Proceedings of the 2020 IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering, St. Petersburg, Russia, 27–30 January 2020; pp. 814–818. [Google Scholar] [CrossRef]
- Rottmann, N.; Studt, N.; Ernst, F.; Rueckert, E. ROS-Mobile: An Android application for the Robot Operating System. arXiv 2020, arXiv:2011.02781. [Google Scholar]
- Anderson, C. The model-view-viewmodel (mvvm) design pattern. In Pro Business Applications with Silverlight 5; Springer: Berlin/Heidelberg, Germany, 2012; pp. 461–499. [Google Scholar]
- Ma, Z.; Zhu, L.; Wang, P.; Zhao, Y. ROS-Based Multi-Robot System Simulator. In Proceedings of the 2019 Chinese Automation Congress (CAC), Hangzhou, China, 22–24 November 2019; pp. 4228–4232. [Google Scholar] [CrossRef]
- Using of the Robotic Operating System for PID control education. IFAC-PapersOnLine 2015, 48, 87–92. [CrossRef]
- Li, Z.; Mei, X. Navigation and Control System of Mobile Robot Based on ROS. In Proceedings of the 2018 IEEE 3rd Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 12–14 October 2018; pp. 368–372. [Google Scholar] [CrossRef]
- Joseph, L.; Johny, A. Programming with ROS. In Robot Operating System (ROS) for Absolute Beginners: Robotics Programming Made Easy; Apress: Berkeley, CA, USA, 2022; pp. 173–240. [Google Scholar] [CrossRef]
- Solak, S.; Yakut, Ö.; Dogru Bolat, E. Design and Implementation of Web-Based Virtual Mobile Robot Laboratory for Engineering Education. Symmetry 2020, 12, 906. [Google Scholar] [CrossRef]
- Pütz, S.; Wiemann, T.; Hertzberg, J. Tools for Visualizing, Annotating and Storing Triangle Meshes in ROS and RViz. In Proceedings of the 2019 European Conference on Mobile Robots (ECMR), Prague, Czech Republic, 4–6 September 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Nithya, M.; Rashmi, M. Gazebo-ROS-Simulink Framework for Hover Control and Trajectory Tracking of Crazyflie 2.0. In Proceedings of the TENCON 2019—2019 IEEE Region 10 Conference (TENCON), Kochi, India, 17–20 October 2019; pp. 649–653. [Google Scholar] [CrossRef]
- Az-zahra, H.M.; Fauzi, N.; Kharisma, A.P. Evaluating E-marketplace Mobile Application Based on People At the Center of Mobile Application Development (PACMAD) Usability Model. In Proceedings of the 2019 International Conference on Sustainable Information Engineering and Technology (SIET), Lombok, Indonesia, 28–30 September 2019; pp. 72–77. [Google Scholar] [CrossRef]
- Harrison, R.; Flood, D.; Duce, D. Usability of mobile applications: Literature review and rationale for a new usability model. J. Interact. Sci. 2013, 1, 1–16. [Google Scholar] [CrossRef]
- Gutiérrez, J.M.A. Google forms como instrumento de medición de conocimientos. Rev. Vinculando 2017, 1, 1–14. [Google Scholar]
- Joshi, A.; Kale, S.; Chandel, S.; Pal, D.K. Likert scale: Explored and explained. Br. J. Appl. Sci. Technol. 2015, 7, 396. [Google Scholar] [CrossRef]
- Chinmayi, R.; Jayam, Y.K.; Tunuguntla, V.; Dammuru, J.V.; Nadella, H.; Anudeep Dulla, S.S.K.; Kartheek Raja, L.S.; Nair, J.G. Obstacle Detection and Avoidance Robot. In Proceedings of the 2018 IEEE International Conference on Computational Intelligence and Computing Research (ICCIC), Madurai, India, 13–15 December 2018; pp. 1–6. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Datasheet | |
|---|---|
| Dimensions | 990 mm (height)/360 mm (depth)/415 mm (width) |
| Weight | 11 kg |
| Battery | Lithium-Ion: 4400 mAh (2 units)/Lithium polymer: 50,000 mAh |
| Camera | Orbbec Astra RGBD |
| Lidar | Slamtec RPLIDAR A3M1 360 laser scanner |
| Display | GeChic 1306H Monitor Touch Display |
| Mobile Base | Kobuki |
| Platform | CeCi1.0 |
| CPU | Intel® Core™ i7-7567U Processor (4M Cache, up to 16.00 GHz) |
| Networking | Intel® Wireless-AC 8265; Bluetooth 4.2; Intel® Ethernet Connection I219-V |
| Motion Speed | 70 cm/s |
| Maximum Rotational Velocity | 180 deg/s (>110 deg/s gyro performance will degrade) |
| Threshold Climbing | Climb thresholds of 12 mm or lower |
| Odometry | 52 ticks/enc rev, 2578.33 ticks/wheel rev, 11.7 ticks/mm |
| Bumpers | left, center, right |
| Payload | 2.6 kg (hard floor); 1.2 kg (carpet) |
| Brand | Model | Processor | Memory RAM | Android Version | CPU Usage | Ram Memory Usage |
|---|---|---|---|---|---|---|
| Samsung | Galaxy Tab S7 FE SM-T733 | Octa-Core 2.4 GHz (8xArm Cortex-A55) | 4 GB | 12 | 33% | 73% |
| Samsung | Tab A-SMT515 | Octa-Core 1.8 GHz (Samsung Exynos, 2xArm Cortex-A73) | 2 GB | 11 | 52% | 68% |
| Redmi | Note 9 Pro | Octa-Core 2.32 GHz (2xQualcomm 0x804) | 6 GB | 11 | 30% | 61% |
| Samsung | A32 SM-A325M /DS | Octa-Core 2 GHz (2x ARM Cortex-A75) | 4 GB | 12 | 30% | 69% |
| Realme | 7 Pro-RMX2170 | Octa-Core 2.32 GHz (Qualcomm Snapdragon 720 G, Kryo 465) | 8 GB | 12 | 31% | 51% |
| Samsung | Galaxy j5 SM J500M | Quad Core 1.19 GHz Qualcomm Snapdragon 400, 4xARMCortex-A53 | 1.5 GB | 6.0.1 | 72% | 60% |
| Samsung | Galaxy j5 SM J500H | Quad Core 1.19 GHz Qualcomm Snapdragon 400, 4xARMCortex-A53 | 1.5 GB | 5.1.1 | 67% | 63% |
| Samsung | A12 | Octa-Core 2 GHz (8xArm Cortex-A55) | 4 GB | 11 | 27% | 64% |
| Samsung | A20S SM-A207M | Octa-Core 1.8 GHz (Qualcomm Snapdragon 450, 8xArm Cortex-A53) | 3 GB | 11 | 43% | 58% |
| Tecno | BD4 | Octa-Core 1.6 GHz (Unisoc Cortex-A55) | 2 GB | 11 | 78% | 72% |
| Android Devices | Ping CeCi (ms) | Time Button Action (ms) |
|---|---|---|
| Samsung Tab S7 | 16.98 | 32.66 |
| Samsung Tab A | 19.01 | 34.89 |
| Redmi Note 9 | 27.64 | 49.83 |
| Samsung A32 | 31.08 | 57.05 |
| Realme 7 Pro | 46.96 | 96.64 |
| Samsung J5 | 140.01 | 191.75 |
| Samsung J5 | 162.72 | 234.87 |
| Samsung A12 | 189.68 | 253.23 |
| Samsung A20 | 207.91 | 246.68 |
| Tecno BD4 | 232.09 | 464.72 |
| Average of all devices | 107.40 | 166.23 |
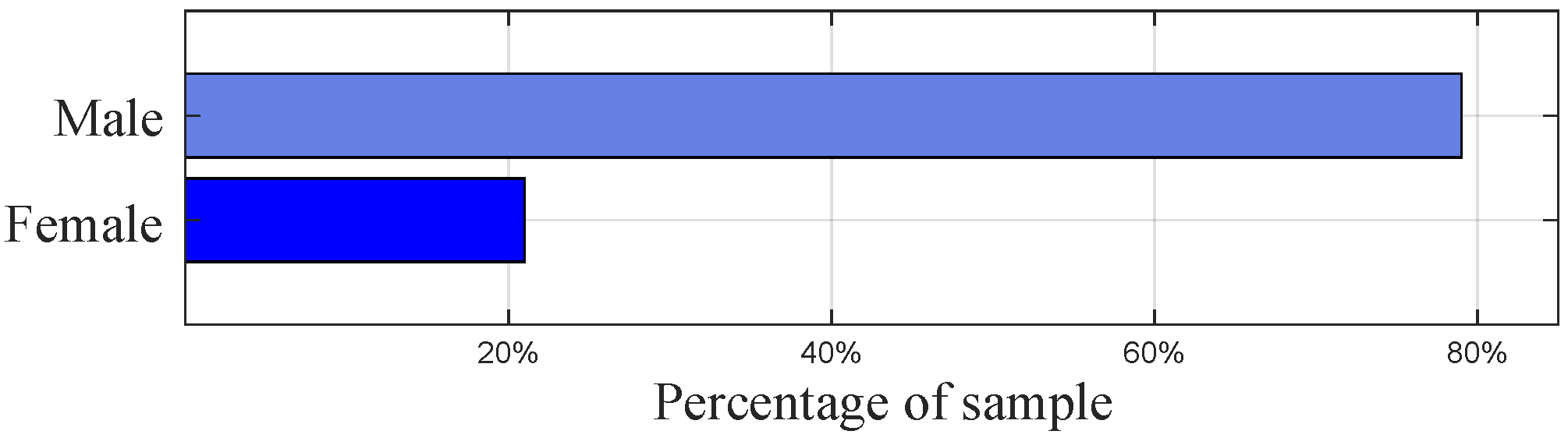
| Gender | Number | Percentage |
|---|---|---|
| Female | 11 | 21% |
| Male | 41 | 79% |
| I do not wish to answer | 0 | 0% |
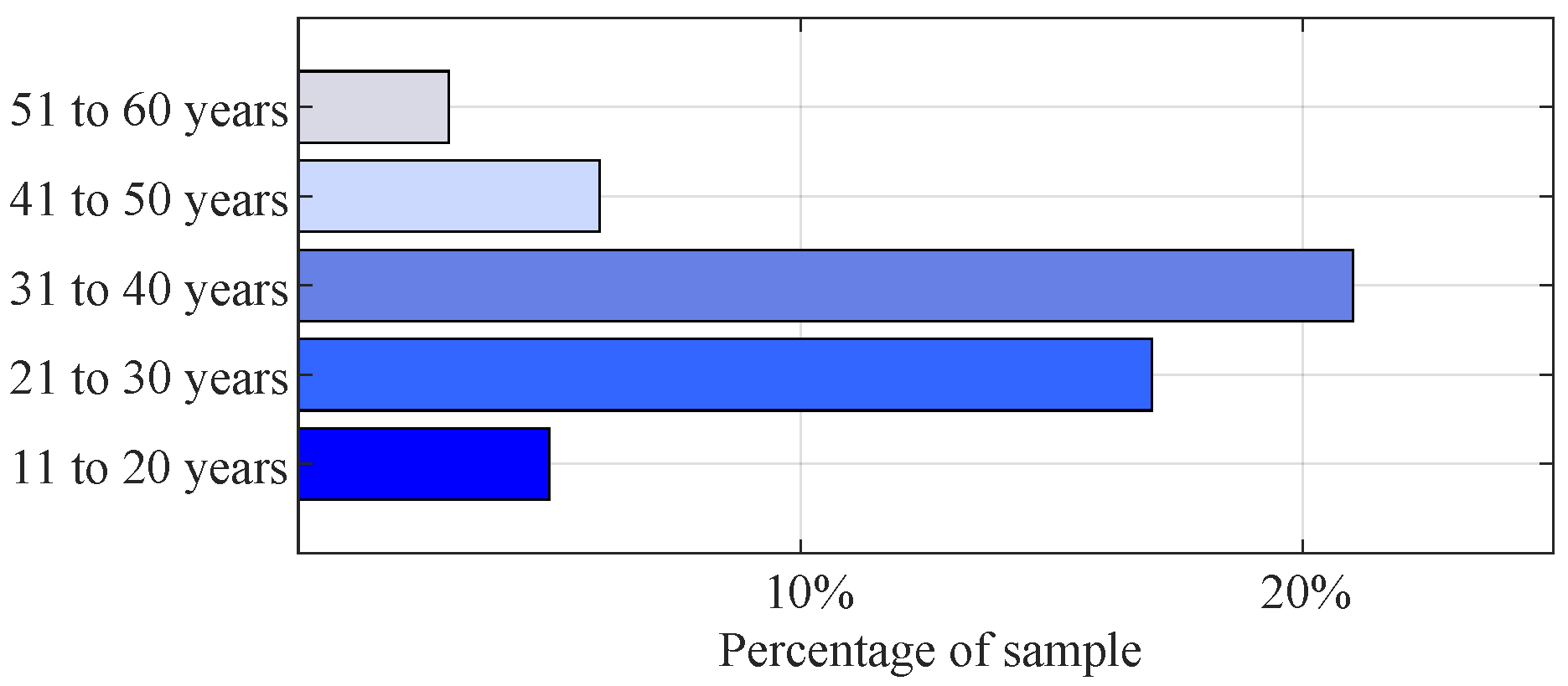
| Age Ranges | Number | Percentage |
|---|---|---|
| 11 to 20 years | 5 | 10% |
| 21 to 30 years | 17 | 33% |
| 31 to 40 years | 21 | 40% |
| 41 to 50 years | 6 | 12% |
| 51 to 60 years | 3 | 6% |
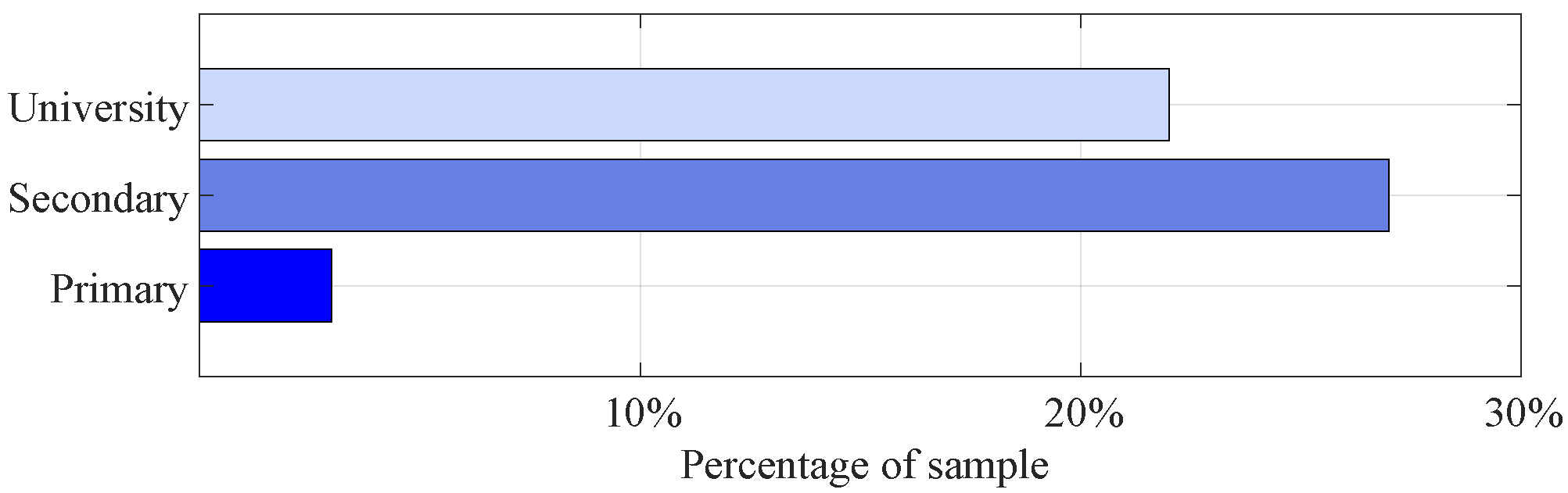
| Education Level | Number | Percentage |
|---|---|---|
| Primary | 3 | 6% |
| Secondary | 27 | 52% |
| University | 22 | 42% |
| Items of the Technology-Specific Expectation Scale | Very Low Expectation | Neutral | Very High Expectation |
|---|---|---|---|
| 1. Does the robot execute the orders given by you from the application? | 0% | 15% | 85% |
| 2. The robot’s response to the orders given from the application was… | 2% | 12% | 86% |
| 3. Did the application performance meet your expectations? | 0% | 19% | 81% |
| 4. Learning to use the application for you was… | 4% | 13% | 83% |
| 5. Do you think you could use the app again without prior explanation? | 6% | 19% | 75% |
| 6. Using this app as a remote control for the robot, in your opinion it was… | 0% | 13% | 87% |
| 7. Do you remember the existing buttons in the application and their use? | 0% | 35% | 65% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Barbecho-Jimbo, E.; Vallejo-Ramírez, D.; Cobos-Torres, J.-C.; Angulo, C.; Flores-Vázquez, C. Remote Operation of CeCi Social Robot. Robotics 2023, 12, 19. https://doi.org/10.3390/robotics12010019
Barbecho-Jimbo E, Vallejo-Ramírez D, Cobos-Torres J-C, Angulo C, Flores-Vázquez C. Remote Operation of CeCi Social Robot. Robotics. 2023; 12(1):19. https://doi.org/10.3390/robotics12010019
Chicago/Turabian StyleBarbecho-Jimbo, Edisson, David Vallejo-Ramírez, Juan-Carlos Cobos-Torres, Cecilio Angulo, and Carlos Flores-Vázquez. 2023. "Remote Operation of CeCi Social Robot" Robotics 12, no. 1: 19. https://doi.org/10.3390/robotics12010019
APA StyleBarbecho-Jimbo, E., Vallejo-Ramírez, D., Cobos-Torres, J.-C., Angulo, C., & Flores-Vázquez, C. (2023). Remote Operation of CeCi Social Robot. Robotics, 12(1), 19. https://doi.org/10.3390/robotics12010019