
An Analysis of Power Consumption of Fluid-Driven Robotic Arms Using Isotropy Index: A Proof-of-Concept Simulation-Based Study



Abstract
:1. Introduction
2. Materials and Methods
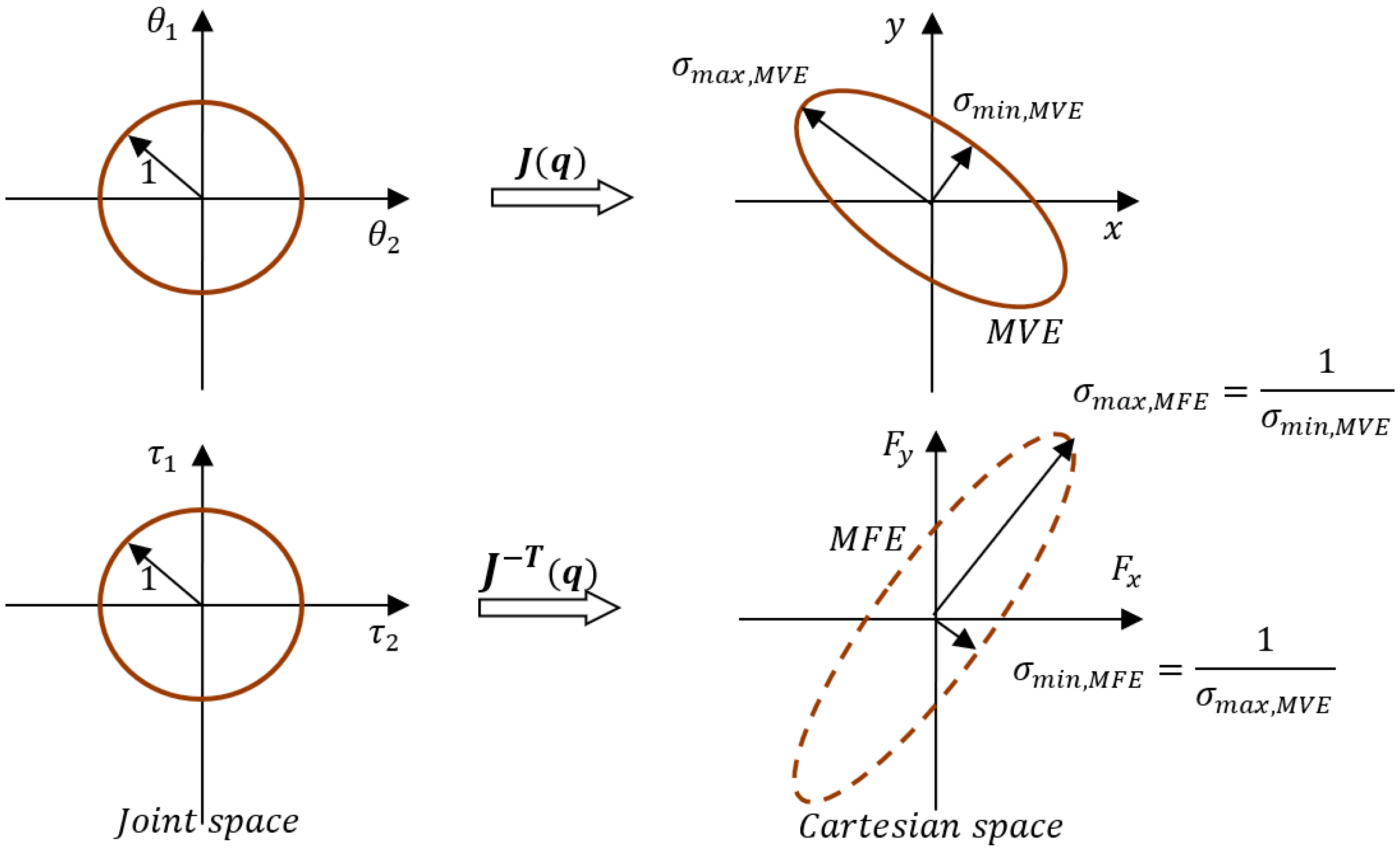
2.1. The Manipulability Velocity and Force Ellipsoids
2.1.1. Jacobian Matrix
2.1.2. Manipulability Ellipsoids
2.1.3. Manipulability Measures
2.2. Power Consumption in Fluid-Power-Driven Robotic Arms
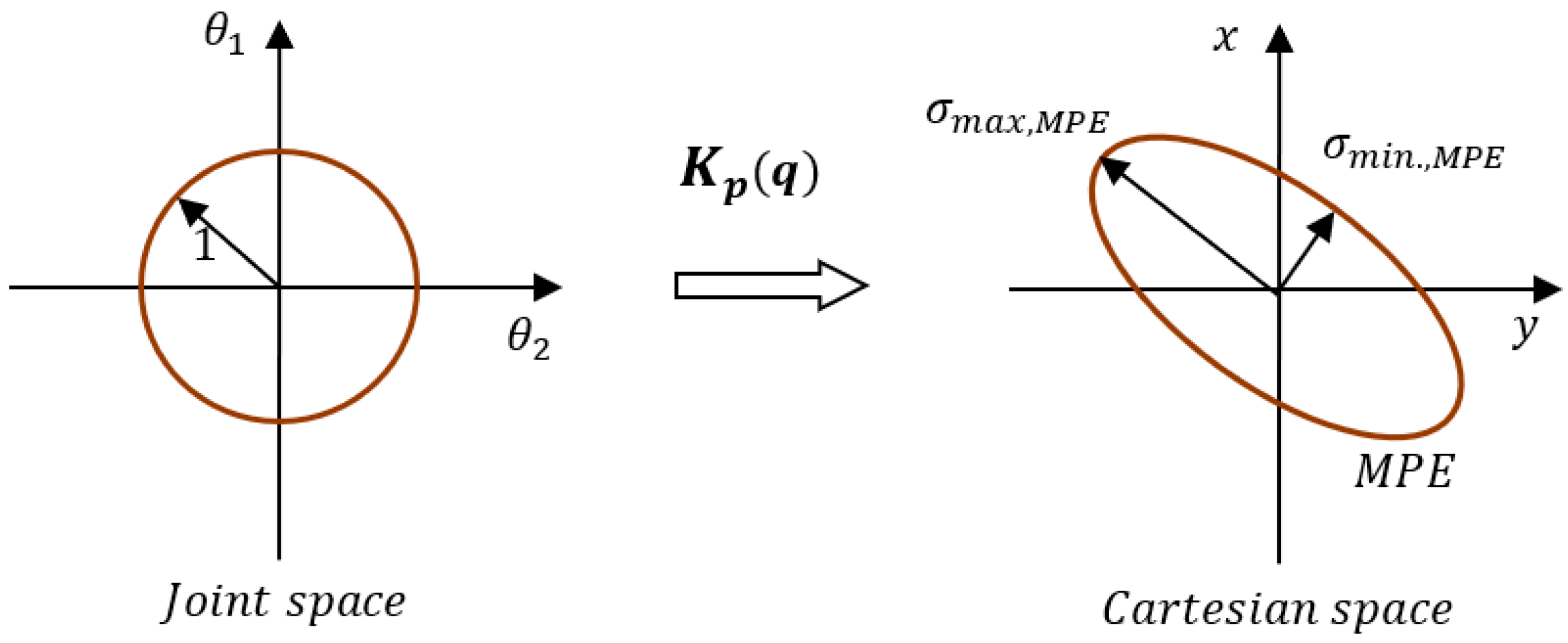
2.3. Power Ellipsoid (PE)
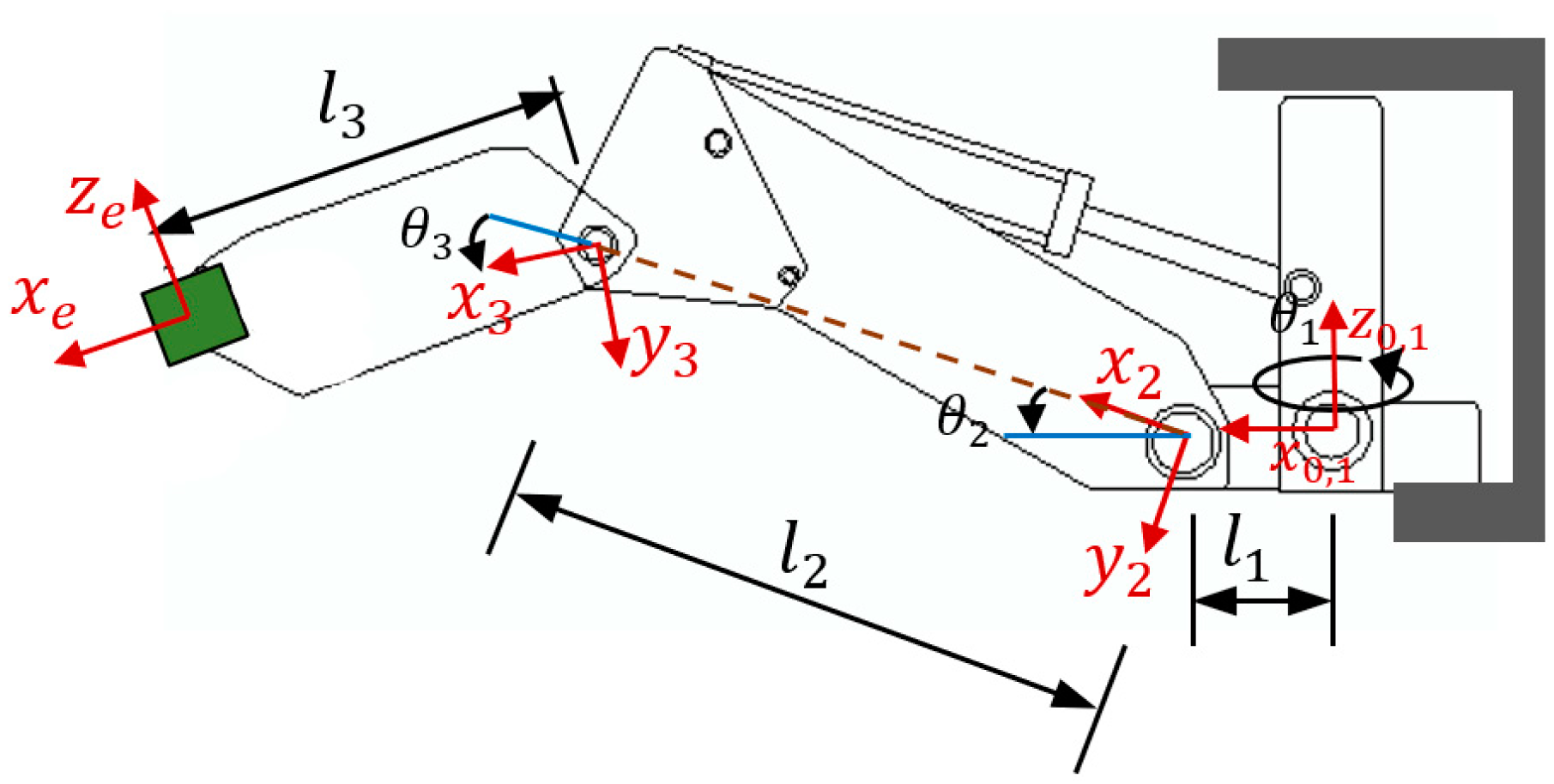
2.4. Simulation Setup
3. Results
3.1. Simulation Results
3.2. Cross-Correlation Analysis
4. Discussion
Author Contributions
Funding
Informed Consent Statement
Conflicts of Interest
References
- Wang, L.; Wang, X. Cloud-Based Cyber-Physical Systems in Manufacturing; Springer International Publishing: New York, NY, USA, 2018; pp. 163–192. [Google Scholar]
- Gabriel, C.A.; Kirkwood, J. Business Models for Model Businesses: Lessons from Renewable Energy Entrepreneur in Developing Countries. Energy Policy 2016, 95, 336–349. [Google Scholar] [CrossRef]
- Papadopoulos, E.; Gonthier, Y. A Frame Force for Large Force Task Planning of Mobile and Redundant Manipulators. J. Robot. Syst. 1999, 16, 151–162. [Google Scholar] [CrossRef]
- Koeppe, R.; Yoshikawa, T. Dynamic Manipulability Analysis of Compliant Motion. In Innovative Robotics for Real-World Applications, Proceedings of the IEEE/RSJ International Conference on Intelligent Robot and Systems, Grenoble, France, 11 September 1997; IEEE: Piscataway, NJ, USA; Volume 3, pp. 1472–1478.
- Yoshikawa, T. Manipulability and Redundancy Control of Robotic Mechanisms. In Proceedings of the IEEE International Conference on Robotics and Automation, St. Louis, MO, USA, 25–28 March 1985; Volume 2, pp. 1004–1009. [Google Scholar]
- Yamamoto, Y.; Yun, X. Unified Analysis on Mobility and Manipulability of Mobile Manipulators. In Proceedings of the IEEE International Conference on Robotics and Automation, Detroit, MI, USA, 10–15 May 1999; Volume 2, pp. 1200–1206. [Google Scholar]
- Melchiorri, C.; Chiaccio, P.; Chiaverini, S.; Sciavicco, L.; Siciliano, B. Comments on “Global task space manipulability ellipsoids for multiple-arm systems and further considerations” [with reply] P. Chiacchio, et al. IEEE Trans. Robot. Autom. 1993, 9, 232–236. [Google Scholar] [CrossRef]
- Balye, B.; Fourquet, J.Y.; Renaud, M. Manipulability of Wheeled Mobile Manipulators: Application to Motion Generation. Int. J. Robot. Res. 2003, 28, 565–581. [Google Scholar] [CrossRef]
- Balye, B.; Fourquet, J.Y.; Renaud, M. Nonholonomic Mobile Manipulators: Kinematics, Velocities and Redundancies. J. Intell. Robot. Syst. 2003, 36, 45–63. [Google Scholar] [CrossRef]
- Merlet, J.P. Jacobian, Manipulability, Condition Number and Accuracy of Parallel Robots. J. Mech. Des. 2006, 28, 199–206. [Google Scholar] [CrossRef]
- Zhou, Y.; Luo, J.; Wang, M. Dynamic Manipulability Analysis of Multi-Arm Space Robot. Robotica 2021, 39, 23–41. [Google Scholar] [CrossRef]
- Wang, Y.; Belzile, B.; Angeles, J.; Li, Q. Kinematic Analysis and Optimum Design of a Novel 2PUR-2RPU Parallel Robot. Mech. Mach. Theory 2019, 139, 407–423. [Google Scholar] [CrossRef]
- Haviland, J.; Corke, P. A Purely-Reactive Manipulability-Maximizing Motion Controller. Available online: https://arxiv.org/abs/2002.11901 (accessed on 23 December 2021).
- Bamdad, M.; Bahri, M. Kinematics and Manipulability Analysis of a Highly Articulated Soft Robotic Manipulator. Robotica 2019, 37, 868–882. [Google Scholar] [CrossRef]
- Choi, H.; Ryu, J. Convex Hull-Based Power Manipulability Analysis of Robot Manipulators. In Proceedings of the IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 2972–2977. [Google Scholar]
- Mansouri, I.; Ouali, M. The Power Manipulability—A New Homogeneous Performance Index of Robot Manipulators. Robot. Comput.-Integr. Manuf. 2011, 27, 434–449. [Google Scholar] [CrossRef]
- Mansouri, I.; Ouali, M. Quaternion Representation of the Power Manipulability. Trans. Can. Soc. Mech. Eng. 2011, 35, 309–336. [Google Scholar] [CrossRef]
- Nguyen, C.C.; Zhou, Z.L.; Mosier, G.E. Analysis and control of a kinematically redundant manipulator. Comput. Electr. Eng. 1991, 17, 147–161. [Google Scholar] [CrossRef]
- Gloub, G.; Van Loan, C. Matrix Computation; John Hopkins University Press: Baltimore, MD, USA, 1996. [Google Scholar]
- Banthia, V.; Maddahi, Y.; Zareinia, K.; Liao, S.; Olson, T.; Fung, W.K.; Balakrishnan, S.; Sepehri, N. A Prototype Telerobotic Platform for Live Transmission Line Maintenance: Review of Design and Development. Trans. Inst. Meas. Control. 2018, 40, 3273–3292. [Google Scholar] [CrossRef] [Green Version]
- Maddahi, Y.; Liao, S.; Fung, W.K.; Hossain, E.; Sepehri, N. Selection of Network Parameters in Wireless Control of Bilateral Teleoperated Manipulators. IEEE Trans. Ind. Inform. 2015, 11, 1445–1456. [Google Scholar] [CrossRef] [Green Version]
- Maddahi, Y.; Gan, L.S.; Zareinia, K.; Lama, S.; Sepehri, N.; Sutherland, G.R. Quantifying Workspace and Forces of Surgical Dissection during Robot-assisted Neurosurgery. Int. J. Med. Robot. Comput. Assist. Surg. 2016, 12, 528–537. [Google Scholar] [CrossRef] [PubMed]
- Abramowitz, M.; Stegun, I. Handbook of Mathematical Functions with Formulas, Graphs and Mathematical Tables; US Government Printing Office: Washington, DC, USA, 1970.
- Brown, R.; Hwang, P. Introduction to Random Signals and Applied Kalman Filtering, 2nd ed.; Wiley: New York, NY, USA, 1992; p. 512. ISBN 0-471-52573-1. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Measure | Equation | Description |
|---|---|---|
| Yoshikawa’s measure | , | Yoshikawa [18]. |
| Condition number | 1 | The condition number of a mapping matrix measuring the directional uniformity of the ellipsoid. |
| Isotropy index | The ratio of the length of minor semiaxis to the length of major semiaxis of the manipulability velocity ellipsoid. | |
| Eccentricity measure | The eccentricity of the ellipsoid and the ability of the end effector to move in a desired direction. |
| Measure Increased | Power Consumption |
|---|---|
| Link | Length (m) | Mass (kg) | Range | Variable |
|---|---|---|---|---|
| 1 | 0.133 | 7.3 | 55° | |
| 2 | 0.549 | 22.5 | 90° | |
| 3 | 0.342 | 15.7 | 130° |
| Parameter | Value |
|---|---|
| Pump pressure, | 7.2 MPa |
| Tank Pressure, | 0 MPa |
| Piston area (blind side) | 3.167 × 10−3 m2 |
| Piston area (rode side) | 2.6603 × 10−3 m2 |
| Hydraulic fluid density, | 847.16 kg/m3 |
| Stoke of cylinder 1, | 0.26416 m |
| Stroke of cylinder 2, | 0.15875 m |
| Stroke of cylinder 3, | 0.1016 m |
| Measure | Equation | Description |
|---|---|---|
| Mean value (first moment) | . | |
| Variance (second moment) | ||
| Kurtosis (third moment) 1 | . | |
| Skewness (fourth moment) 2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Maddahi, Y.; Zareinia, K. An Analysis of Power Consumption of Fluid-Driven Robotic Arms Using Isotropy Index: A Proof-of-Concept Simulation-Based Study. Robotics 2022, 11, 32. https://doi.org/10.3390/robotics11020032
Maddahi Y, Zareinia K. An Analysis of Power Consumption of Fluid-Driven Robotic Arms Using Isotropy Index: A Proof-of-Concept Simulation-Based Study. Robotics. 2022; 11(2):32. https://doi.org/10.3390/robotics11020032
Chicago/Turabian StyleMaddahi, Yaser, and Kourosh Zareinia. 2022. "An Analysis of Power Consumption of Fluid-Driven Robotic Arms Using Isotropy Index: A Proof-of-Concept Simulation-Based Study" Robotics 11, no. 2: 32. https://doi.org/10.3390/robotics11020032
APA StyleMaddahi, Y., & Zareinia, K. (2022). An Analysis of Power Consumption of Fluid-Driven Robotic Arms Using Isotropy Index: A Proof-of-Concept Simulation-Based Study. Robotics, 11(2), 32. https://doi.org/10.3390/robotics11020032