
Model-Based Mid-Level Regulation for Assist-As-Needed Hierarchical Control of Wearable Robots: A Computational Study of Human-Robot Adaptation



Abstract
:1. Introduction
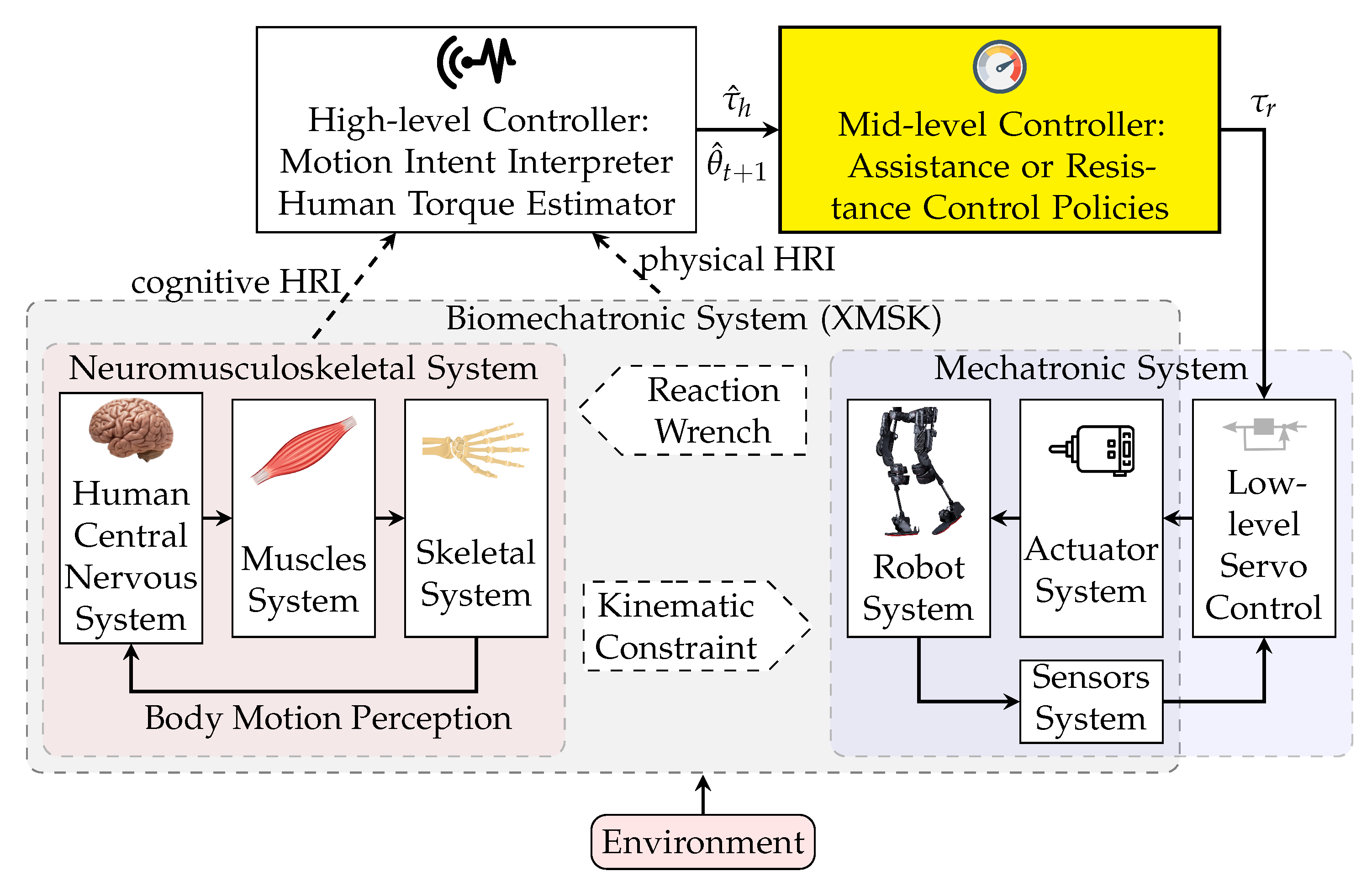
- Consideration of the distinctive effect of the human’s and robot’s dynamic models, as well as the wrench of the environment;
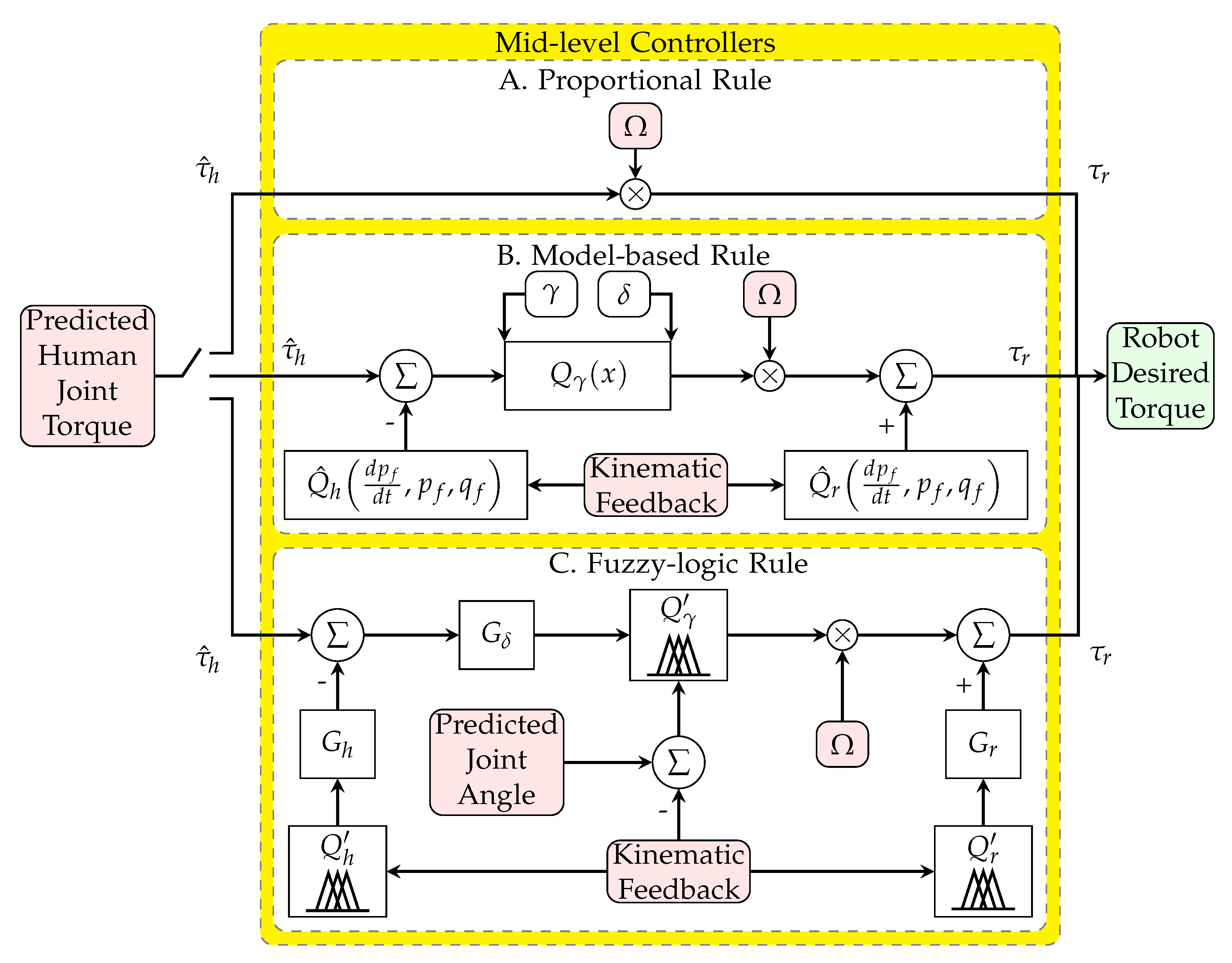
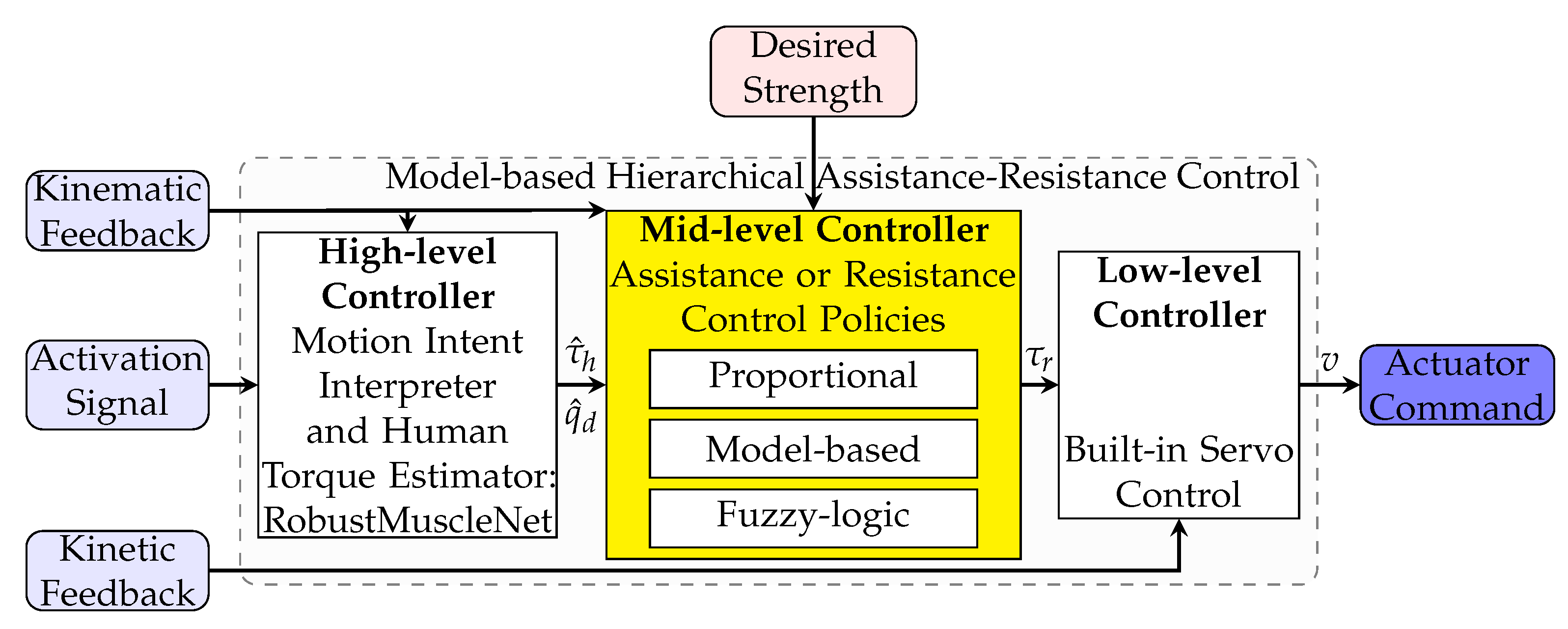
- Optimization, evaluation, and comparison of a proportional, a novel model-based, and a novel fuzzy-logic mid-level controller for assist-as-needed control of a wearable robot during two free motion and lifting tasks;
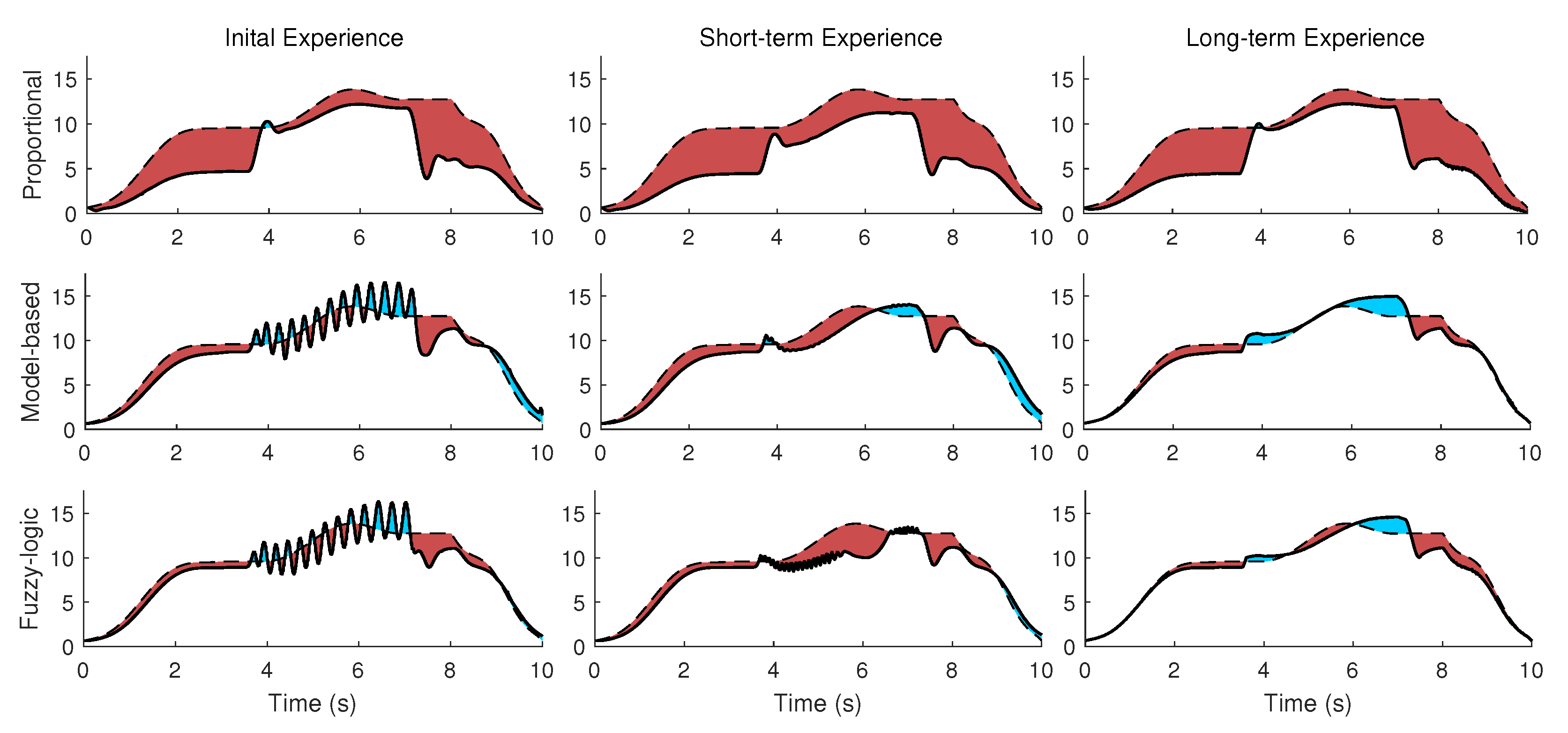
- Assessment of the three mid-level controllers for three phases of (A) initial, (B) short-term, (C) long-term experiences of wearing a powered robot.
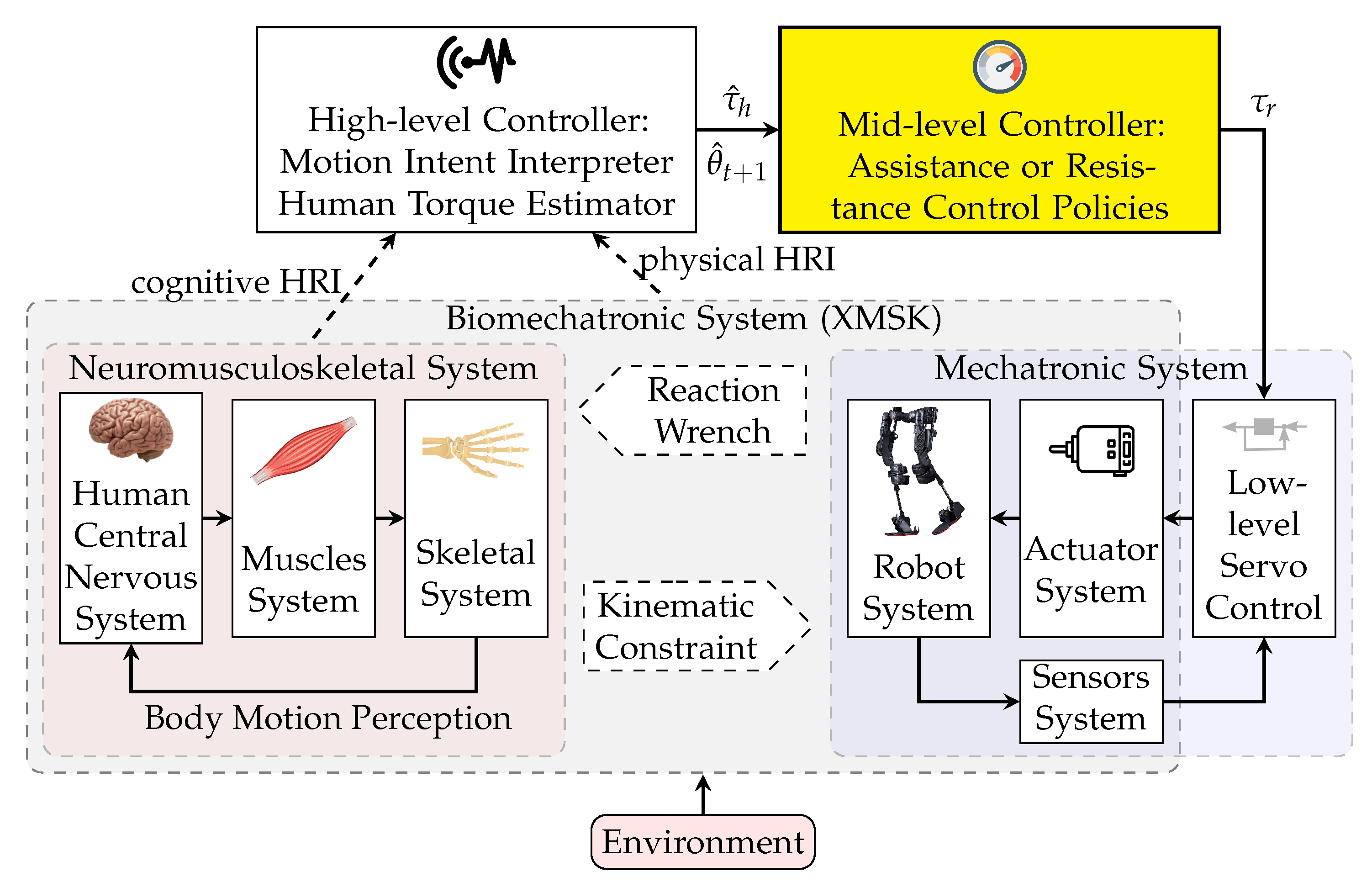
2. Mid-Level Controller
2.1. Proportional Rule
2.2. Model-Based Rule
2.3. Fuzzy-Logic Rule
3. Control System Evaluation
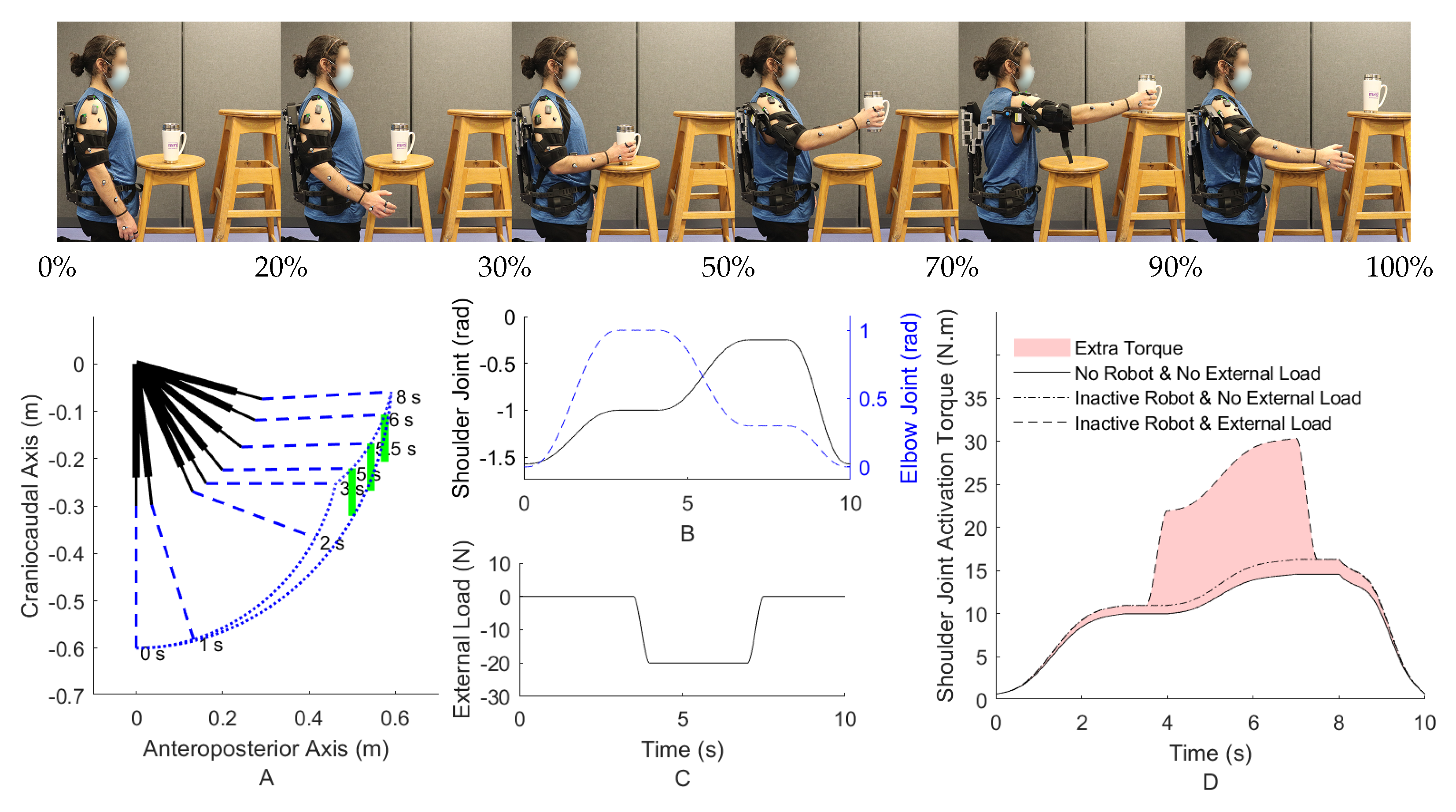
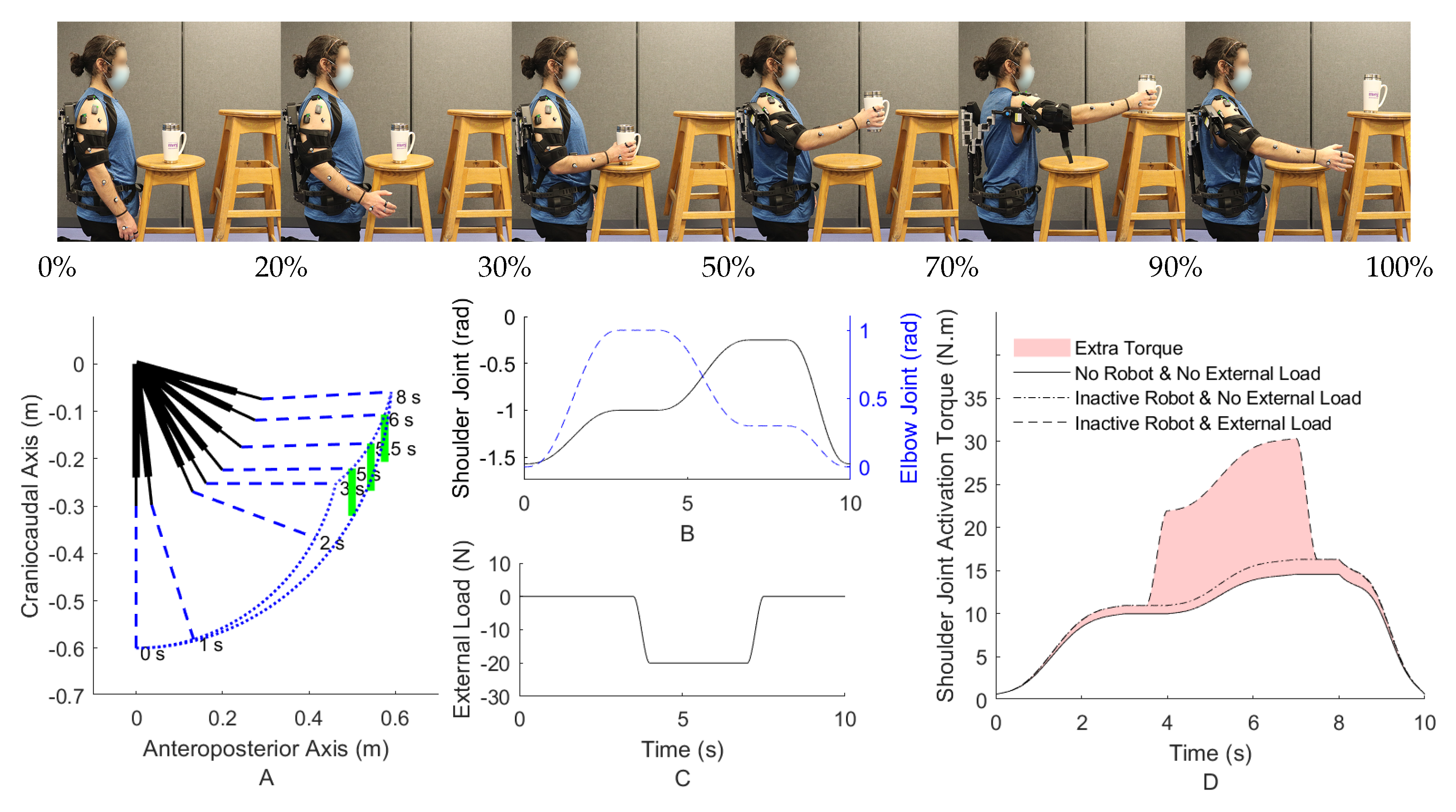
4. Case Study
5. Results and Discussion
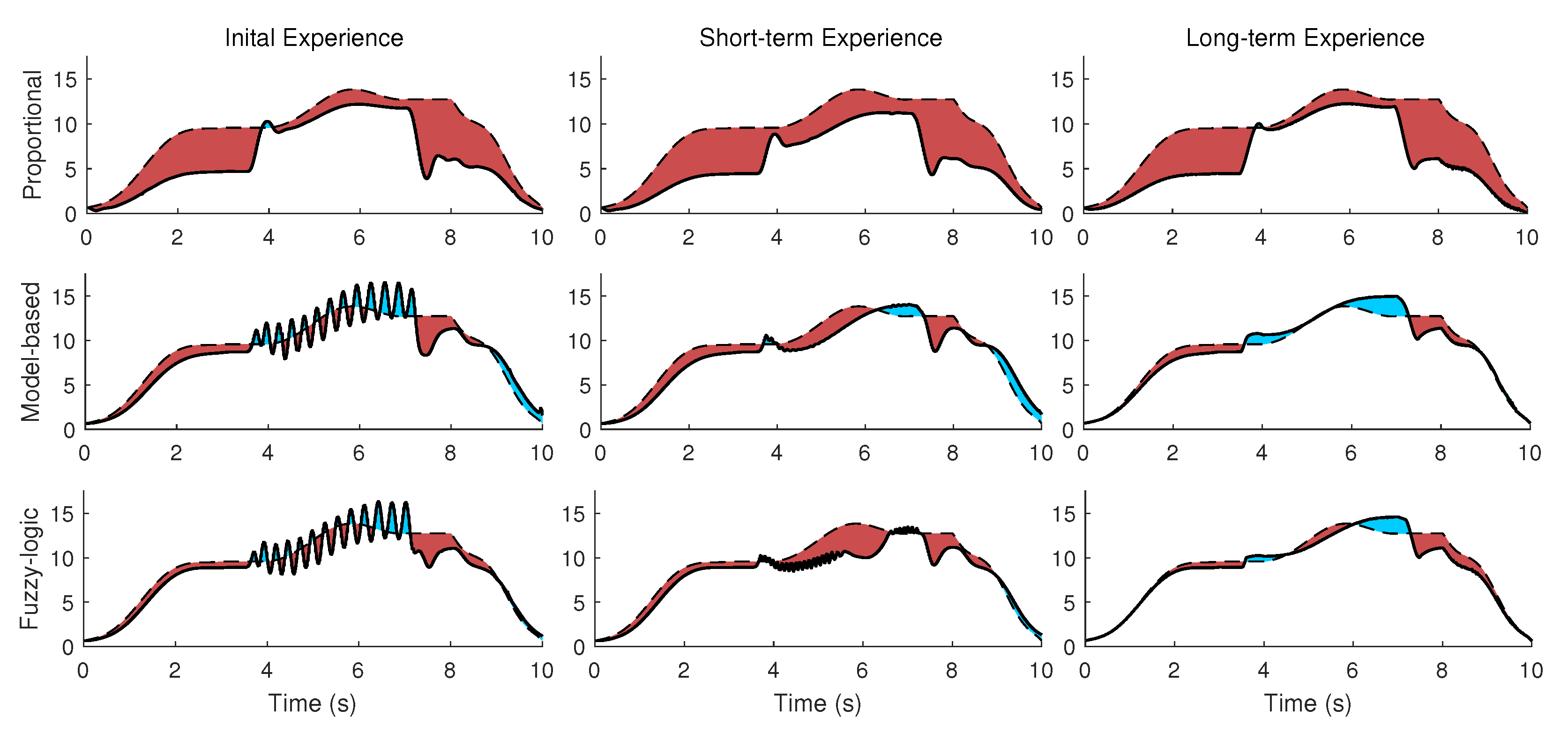
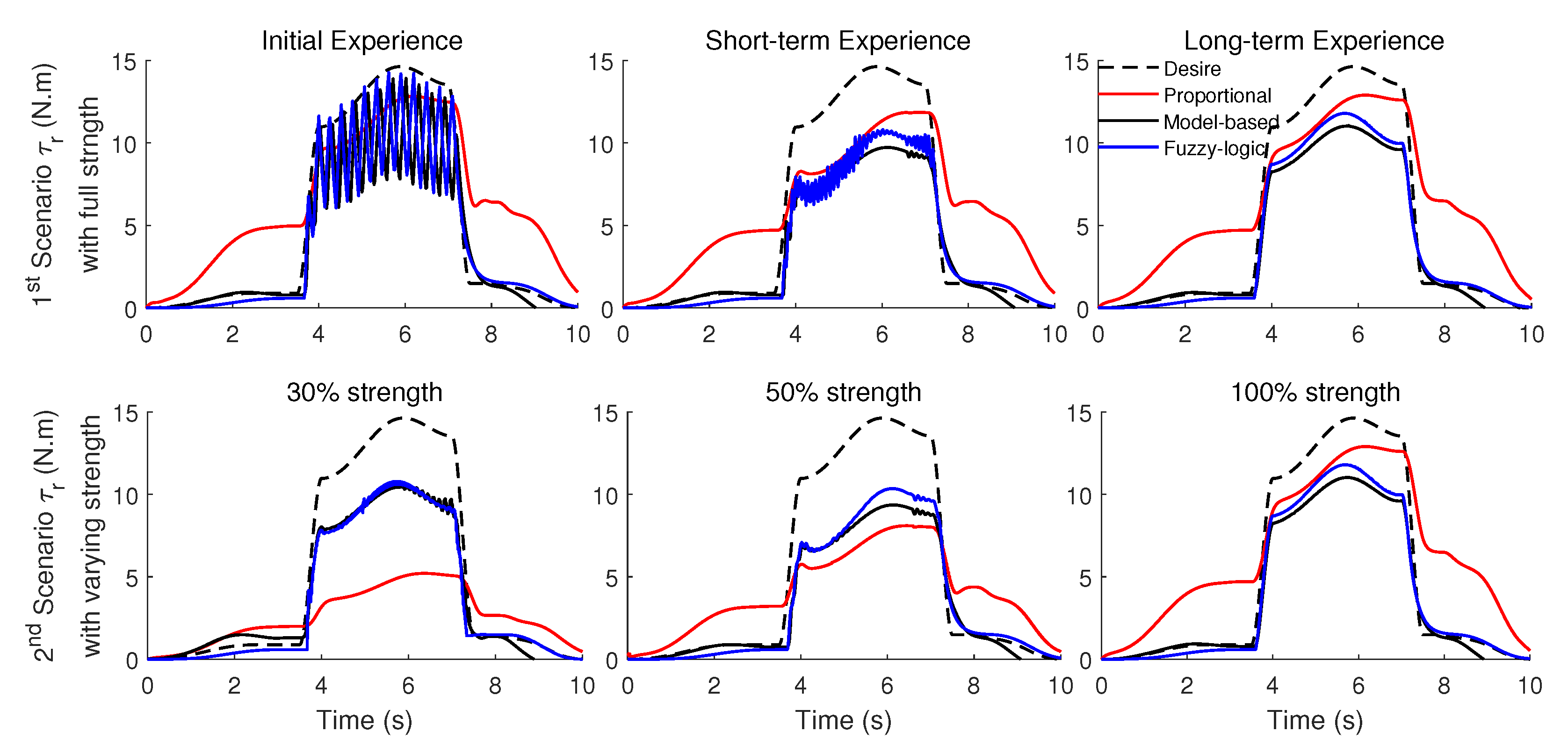
5.1. Full Strength (Fist Scenario)
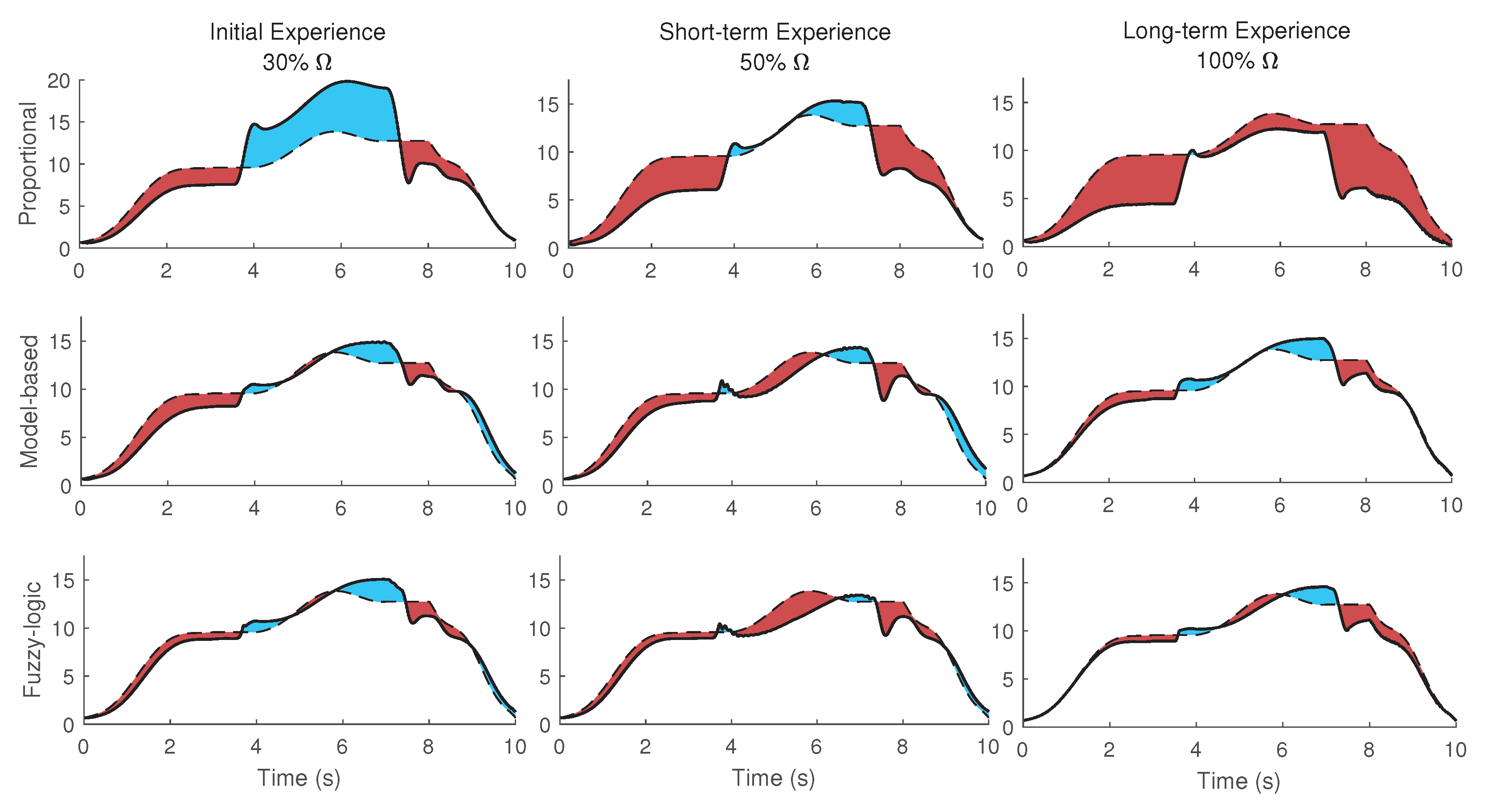
5.2. Variable Strength (Second Scenario)
5.3. Comparison
5.4. Outcome and Future Work
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, Z.; Zhao, K.; Zhang, L.; Wu, X.; Zhang, T.; Li, Q.; Li, X.; Su, C.Y. Human-in-the-loop control of a wearable lower limb exoskeleton for stable dynamic walking. IEEE/ASME Trans. Mechatron. 2021, 26, 2700–2711. [Google Scholar] [CrossRef]
- Nasr, A.; Laschowski, B.; McPhee, J. Myoelectric control of robotic leg prostheses and exoskeletons: A review. In Proceedings of the ASME 2021 Virtual International Design Engineering Technical Conferences & Computers and Information in Engineering Conference, Virtual, 17–19 August 2021; p. DETC2021-69203. [Google Scholar] [CrossRef]
- du Plessis, T.; Djouani, K.; Oosthuizen, C. A review of active hand exoskeletons for rehabilitation and assistance. Robotics 2021, 10, 40. [Google Scholar] [CrossRef]
- Mehrabi, N.; Razavian, R.S.; Ghannadi, B.; McPhee, J. Predictive simulation of reaching moving targets using nonlinear model predictive control. Front. Comput. Neurosci. 2017, 10, 143. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Huang, H.; Si, J.; Brandt, A.; Li, M. Taking both sides: Seeking symbiosis between intelligent prostheses and human motor control during locomotion. Curr. Opin. Biomed. Eng. 2021, 20, 100314. [Google Scholar] [CrossRef] [PubMed]
- Akbas, T.; Sulzer, J. Musculoskeletal simulation framework for impairment-based exoskeletal assistance post-stroke. IEEE Int. Conf. Rehabil. Robot. 2019, 2019, 1185–1190. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Wang, H.; Tian, Y. Adaptive interaction torque-based AAN control for lower limb rehabilitation exoskeleton. ISA Trans. 2021; in press. [Google Scholar] [CrossRef]
- Wen, Y.; Si, J.; Brandt, A.; Gao, X.; Huang, H.H. Online reinforcement learning control for the personalization of a robotic knee prosthesis. IEEE Trans. Cybern. 2020, 50, 2346–2356. [Google Scholar] [CrossRef] [PubMed]
- Young, A.J.; Ferris, D.P. State of the art and future directions for lower limb robotic exoskeletons. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 171–182. [Google Scholar] [CrossRef] [PubMed]
- Liu, J.; Ren, Y.; Xu, D.; Kang, S.H.; Zhang, L.Q. EMG-based real-time linear-nonlinear cascade regression decoding of shoulder, elbow, and wrist movements in able-bodied persons and stroke survivors. IEEE Trans. Biomed. Eng. 2020, 67, 1272–1281. [Google Scholar] [CrossRef] [PubMed]
- Xiao, F. Proportional myoelectric and compensating control of a cable-conduit mechanism-driven upper limb exoskeleton. ISA Trans. 2019, 89, 245–255. [Google Scholar] [CrossRef] [PubMed]
- Gull, M.A.; Bai, S.; Bak, T. A review on design of upper limb exoskeletons. Robotics 2020, 9, 16. [Google Scholar] [CrossRef] [Green Version]
- Noronha, B.; Accoto, D. Exoskeletal devices for hand assistance and rehabilitation: A comprehensive analysis of state-of-the-art technologies. IEEE Trans. Med. Robot. Bionics 2021, 3, 525–538. [Google Scholar] [CrossRef]
- Trigili, E.; Crea, S.; Moisè, M.; Baldoni, A.; Cempini, M.; Ercolini, G.; Marconi, D.; Posteraro, F.; Carrozza, M.C.; Vitiello, N. Design and experimental characterization of a shoulder-elbow exoskeleton with compliant joints for post-stroke rehabilitation. IEEE/ASME Trans. Mechatron. 2020, 24, 1485–1496. [Google Scholar] [CrossRef]
- Shore, L.; Power, V.; de Eyto, A.; O’Sullivan, L.W. Technology acceptance and user-centred design of assistive exoskeletons for older adults: A commentary. Robotics 2018, 7, 3. [Google Scholar] [CrossRef] [Green Version]
- Lee, H.; Kim, W.; Han, J.; Han, C. The technical trend of the exoskeleton robot system for human power assistance. Int. J. Precis. Eng. Manuf. 2012, 13, 1491–1497. [Google Scholar] [CrossRef]
- Van Dijk, W.; Van Der Kooij, H. XPED2: A passive exoskeleton with artificial tendons. IEEE Robot. Autom. Mag. 2014, 21, 56–61. [Google Scholar] [CrossRef] [Green Version]
- Witte, K.A.; Collins, S.H. Design of lower-limb exoskeletons and emulator systems. In Wearable Robotics: Systems and Applications; Elsevier: Amsterdam, The Netherlands, 2019; Chapter 13; pp. 251–274. [Google Scholar] [CrossRef]
- Asl, H.J.; Katagiri, K.; Narikiyo, T.; Yamashita, M.; Kawanishi, M. Satisfying task completion and assist-as-needed performance in robotic exoskeletons. IEEE Trans. Med. Robot. Bionics 2021, 3, 791–800. [Google Scholar] [CrossRef]
- Cui, X.; Chen, W.; Jin, X.; Agrawal, S.K. Design of a 7-DOF cable-driven arm exoskeleton (CAREX-7) and a controller for dexterous motion training or assistance. IEEE/ASME Trans. Mechatron. 2017, 22, 161–172. [Google Scholar] [CrossRef]
- Yihun, Y.; Adhikari, V.; Majidirad, A.; Desai, J. Task-based knee rehabilitation with assist-as-needed control strategy and recovery tracking system. J. Eng. Sci. Med. Diagn. Ther. 2020, 3, JESMDT-19-1051. [Google Scholar] [CrossRef]
- Long, Y.; Du, Z.; Cong, L.; Wang, W.; Zhang, Z.; Dong, W. Active disturbance rejection control based human gait tracking for lower extremity rehabilitation exoskeleton. ISA Trans. 2017, 67, 389–397. [Google Scholar] [CrossRef]
- Sanz-Merodio, D.; Cestari, M.; Arevalo, J.C.; Carrillo, X.A.; Garcia, E. Generation and control of adaptive gaits in lower-limb exoskeletons for motion assistance. Adv. Robot. 2014, 28, 329–338. [Google Scholar] [CrossRef] [Green Version]
- Rosen, J.; Perry, J.C. Upper limb powered exoskeleton. Int. J. Humanoid Robot. 2007, 4, 529–548. [Google Scholar] [CrossRef]
- Tang, Z.; Zhang, K.; Sun, S.; Gao, Z.; Zhang, L.; Yang, Z. An upper-limb power-assist exoskeleton using proportional myoelectric control. Sensors 2014, 14, 6677–6694. [Google Scholar] [CrossRef] [Green Version]
- Han, J.; Yang, S.; Xia, L.; Chen, Y.H. Deterministic adaptive robust control with a novel optimal gain design approach for a fuzzy 2-DOF lower limb exoskeleton robot system. IEEE Trans. Fuzzy Syst. 2021, 29, 2373–2387. [Google Scholar] [CrossRef]
- Kiguchi, K.; Rahman, M.H.; Sasaki, M.; Teramoto, K. Development of a 3DOF mobile exoskeleton robot for human upper-limb motion assist. Robot. Auton. Syst. 2008, 56, 678–691. [Google Scholar] [CrossRef]
- Mauri, A.; Lettori, J.; Fusi, G.; Fausti, D.; Mor, M.; Braghin, F.; Legnani, G.; Roveda, L. Mechanical and control design of an industrial exoskeleton for advanced human empowering in heavy parts manipulation tasks. Robotics 2019, 8, 65. [Google Scholar] [CrossRef] [Green Version]
- Teng, L.; Gull, M.A.; Bai, S. PD-based fuzzy sliding mode control of a wheelchair exoskeleton robot. IEEE/ASME Trans. Mechatron. 2020, 25, 2546–2555. [Google Scholar] [CrossRef]
- Menga, G.; Ghirardi, M. Lower limb exoskeleton for rehabilitation with improved postural equilibrium. Robotics 2018, 7, 28. [Google Scholar] [CrossRef] [Green Version]
- Huang, L.; Steger, J.R.; Kazerooni, H. Hybrid control of the Berkeley lower extremity exoskeleton (BLEEX). In American Society of Mechanical Engineers, Dynamic Systems and Control Division (Publication) DSC; ASME: Orlando, FL, USA, 2005; Volume 74, pp. 1429–1436. [Google Scholar] [CrossRef]
- Keller, U.; Van Hedel, H.J.; Klamroth-Marganska, V.; Riener, R. ChARMin: The first actuated exoskeleton robot for pediatric arm rehabilitation. IEEE/ASME Trans. Mechatron. 2016, 21, 2201–2213. [Google Scholar] [CrossRef]
- Dehghani, S.; Bahrami, F. How does the CNS control arm reaching movements? Introducing a hierarchical nonlinear predictive control organization based on the idea of muscle synergies. PLoS ONE 2020, 15, e0228726. [Google Scholar] [CrossRef] [PubMed]
- Todorov, E.; Jordan, M.I. Optimal feedback control as a theory of motor coordination. Nat. Neurosci. 2002, 5, 1226–1235. [Google Scholar] [CrossRef]
- Carpenter, M.B. The co-ordination and regulation of movements. J. Neuropathol. Exp. Neurol. 1968, 27, 348. [Google Scholar] [CrossRef] [Green Version]
- Alexander, R.M. The gaits of bipedal and quadrupedal animals. Int. J. Robot. Res. 1984, 3, 49–59. [Google Scholar] [CrossRef]
- Mombaur, K.; Clever, D. Inverse optimal control as a tool to understand human movement. Springer Tracts Adv. Robot. 2017, 117, 163–186. [Google Scholar] [CrossRef]
- Flash, T.; Hogan, N. The coordination of arm movements: An experimentally confirmed mathematical model. J. Neurosci. 1985, 5, 1688–1703. [Google Scholar] [CrossRef] [PubMed]
- Neptune, R.R.; Hull, M.L. Evaluation of performance criteria for simulation of submaximal steady-state cycling using a forward dynamic model. J. Biomech. Eng. 1998, 120, 334–341. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ackermann, M.; van den Bogert, A.J. Optimality principles for model-based prediction of human gait. J. Biomech. 2010, 43, 1055–1060. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Anderson, F.C.; Pandy, M.G. Static and dynamic optimization solutions for gait are practically equivalent. J. Biomech. 2001, 34, 153–161. [Google Scholar] [CrossRef]
- Razavian, R.S.; McPhee, J. Minimization of muscle fatigue as the criterion to solve muscle forces-sharing problem. In Proceedings of the ASME 2015 Dynamic Systems and Control Conference, DSCC 2015, Columbus, OH, USA, 28–30 October 2015; Volume 1, p. V001T15A001. [Google Scholar] [CrossRef]
- Nasiri, R.; Shushtari, M.; Arami, A. An adaptive assistance controller to optimize the exoskeleton contribution in rehabilitation. Robotics 2021, 10, 95. [Google Scholar] [CrossRef]
- Shushtari, M.; Nasiri, R.; Arami, A. Online reference trajectory adaptation: A personalized control strategy for lower limb exoskeletons. IEEE Robot. Autom. Lett. 2022, 7, 128–134. [Google Scholar] [CrossRef]
- Nasr, A.; Inkol, K.A.; Bell, S.; McPhee, J. InverseMuscleNET: Alternative machine learning solution to static optimization and inverse muscle modelling. Front. Comput. Neurosci. 2021, 15, 759489. [Google Scholar] [CrossRef] [PubMed]
- Inkol, K.A.; Brown, C.; McNally, W.; Jansen, C.; McPhee, J. Muscle torque generators in multibody dynamic simulations of optimal sports performance. Multibody Syst. Dyn. 2020, 50, 435–452. [Google Scholar] [CrossRef]
- Winters, J.M. Hill-based muscle models: A systems engineering perspective. In Multiple Muscle Systems; Springer: New York, NY, USA, 1990; pp. 69–93. [Google Scholar] [CrossRef]
- McNally, W.; McPhee, J. Dynamic optimization of the golf swing using a six degree-of-freedom biomechanical model. Proceedings 2018, 2, 243. [Google Scholar] [CrossRef] [Green Version]
- Reinkensmeyer, D.J.; Wynne, J.H.; Harkema, S.J. A robotic tool for studying locomotor adaptation and rehabilitation. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology, Houston, TX, USA, 23–26 October 2002; Volume 3, pp. 2353–2354. [Google Scholar] [CrossRef]
- Shadmehr, R.; Holcomb, H.H. Inhibitory control of competing motor memories. Exp. Brain Res. 1999, 126, 235–251. [Google Scholar] [CrossRef] [PubMed]
- Gowrishankar, G. Mechanisms of Motor Learning: By Humans, for Robots. Ph.D. Thesis, Imperial College London, London, UK, 2010. [Google Scholar] [CrossRef]
- Reinkensmeyer, D.J.; Emken, J.L.; Cramer, S.C. Robotics, motor learning, and neurologic recovery. Annu. Rev. Biomed. Eng. 2004, 6, 497–525. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shadmehr, R.; Mussa-Ivaldi, F.A. Adaptive representation of dynamics during learning of a motor task. J. Neurosci. 1994, 14, 3208–3224. [Google Scholar] [CrossRef]
- Nasr, A.; Ferguson, S.; McPhee, J. Model-based design and optimization of passive shoulder exoskeletons. In Proceedings of the ASME 2021 Virtual International Design Engineering Technical Conferences & Computers and Information in Engineering Conference, Virtual, 17–19 August 2021; p. DETC2021-69437. [Google Scholar] [CrossRef]
- Brown, C.; McPhee, J. Predictive forward dynamic simulation of manual wheelchair propulsion on a rolling dynamometer. J. Biomech. Eng. 2020, 142, 071008. [Google Scholar] [CrossRef]
- Chaparro-Rico, B.D.M.; Cafolla, D.; Castillo-Castaneda, E.; Ceccarelli, M. Design of arm exercises for rehabilitation assistance. J. Eng. Res. 2020, 8, 203–218. [Google Scholar] [CrossRef]
- Hashemi, A.; McPhee, J. Trajectory planning for a human-robot interaction rehabilitation system using direct-collocation optimization. In Proceedings of the 7th International Conference of Control, Dynamic Systems, and Robotics (CDSR’20), Niagara Falls, ON, Canada, 9–11 November 2020; pp. 1–2. [Google Scholar] [CrossRef]
- Jiang, Y.; Jiang, Z.P.; Qian, N. Optimal control mechanisms in human arm reaching movements. In Proceedings of the 30th Chinese Control Conference, Yantai, China, 22–24 July 2011; pp. 1377–1382. [Google Scholar]
- Lan, N.; Crago, P.E. Optimal control of antagonistic muscle stiffness during voluntary movements. Biol. Cybern. 1994, 71, 123–135. [Google Scholar] [CrossRef]
- Sharifi, M.; Pourtakdoust, S.H.; Parnianpour, M. Optimal control of human-like musculoskeletal arm: Prediction of trajectory and muscle forces. Optim. Control. Appl. Methods 2017, 38, 167–183. [Google Scholar] [CrossRef]
- Davis, J.M.; Bailey, S.P. Possible mechanisms of central nervous system fatigue during exercise. Med. Sci. Sport. Exerc. 1997, 29, 45–57. [Google Scholar] [CrossRef]
- Jalali, P.; Noorani, M.R.S.; Hassannejad, R.; Ettefagh, M.M. Modeling the central nervous system functionality in controlling the calf muscle activity during running with sport shoes. Proc. Inst. Mech. Eng. Part H J. Eng. Med. 2019, 233, 254–266. [Google Scholar] [CrossRef] [PubMed]
- Li, W. Optimal Control for Biological Movement Systems. Ph.D. Thesis, University of California, San Diego, CA, USA, 2006; p. 156. [Google Scholar]
- Ueyama, Y. Effects of cost structure in optimal control on biological arm movement: A simulation study. In Proceedings of the International Conference on Neural Information Processing, Bali, Indonesia, 8–12 December 2013; Springer: Berlin/Heidelberg, Germany, 2013; pp. 241–248. [Google Scholar] [CrossRef]
- Huang, S.; Wensman, J.P.; Ferris, D.P. Locomotor adaptation by transtibial amputees walking with an experimental powered prosthesis under continuous myoelectric control. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 24, 573–581. [Google Scholar] [CrossRef] [PubMed]
- Huang, S.; Wensman, J.P.; Ferris, D.P. An experimental powered lower limb prosthesis using proportional myoelectric control. J. Med. Devices Trans. ASME 2014, 8, 024501. [Google Scholar] [CrossRef]
- Brahmi, B.; Driscoll, M.; El Bojairami, I.K.; Saad, M.; Brahmi, A. Novel adaptive impedance control for exoskeleton robot for rehabilitation using a nonlinear time-delay disturbance observer. ISA Trans. 2021, 108, 381–392. [Google Scholar] [CrossRef] [PubMed]
- He, B.; Huang, H.; Thomas, G.C.; Sentis, L. A complex stiffness human impedance model with customizable exoskeleton control. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 2468–2477. [Google Scholar] [CrossRef] [PubMed]
- Sajadi, M.R.; Nasr, A.; Moosavian, S.A.A.; Zohoor, H. Mechanical design, fabrication, kinematics and dynamics modeling, multiple impedance control of a wrist rehabilitation robot. In Proceedings of the International Conference on Robotics and Mechatronics, ICROM 2015, Tehran, Iran, 7–9 October 2015; pp. 290–295. [Google Scholar] [CrossRef]
- Menga, G.; Ghirardi, M. Control of the sit-to-stand transfer of a biped robotic device for postural rehabilitation. Robotics 2019, 8, 91. [Google Scholar] [CrossRef] [Green Version]
- Sherwani, K.I.; Kumar, N.; Chemori, A.; Khan, M.; Mohammed, S. RISE-based adaptive control for EICoSI exoskeleton to assist knee joint mobility. Robot. Auton. Syst. 2020, 124, 103354. [Google Scholar] [CrossRef] [Green Version]
- Lu, Z.; Chen, X.; Zhang, X.; Tong, K.Y.; Zhou, P. Real-time control of an exoskeleton hand robot with myoelectric pattern recognition. Int. J. Neural Syst. 2017, 27, 1750009. [Google Scholar] [CrossRef] [PubMed]
- Hashemi, A.; McPhee, J. Assistive sliding mode control of a rehabilitation robot with automatic weight adjustment. In Proceedings of the 43rd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Mexico, Mexico, 1–5 November 2021; pp. 4891–4896. [Google Scholar] [CrossRef]
- Laschowski, B.; Mcnally, W.; Wong, A.; Mcphee, J. Environment classification for robotic leg prostheses and exoskeletons using deep convolutional neural networks. Front. Neurorobot. 2021, in press. [Google Scholar] [CrossRef]
- Cafolla, D. A 3D visual tracking method for rehabilitation path planning. In New Trends in Medical and Service Robotics; Springer: Cassino, Italy, 2019; Volume 65, pp. 264–272. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| # | Condition | Statement | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | If | is | Large Negative (LN) | , then | or | is | Zero (Z) | |||||
| 2 | Medium Negative (MN) | Medium (M) | ||||||||||
| 3 | Zero (Z) | Large (L) | ||||||||||
| 4 | Medium Positive (MP) | Medium (M) | ||||||||||
| 5 | Large Positive (LP) | Zero (Z) | ||||||||||
| 6 | If | is | Negative (N) | & | is | Negative (N) | , then | is | Large Negative (LN) | |||
| 7 | Negative (N) | Zero (Z) | Medium Negative (MN) | |||||||||
| 8 | Negative (N) | Positive (P) | Zero (Z) | |||||||||
| 9 | Zero (Z) | Negative (N) | Small Negative (SN) | |||||||||
| 10 | Zero (Z) | Zero (Z) | Zero (Z) | |||||||||
| 11 | Zero (Z) | Positive (P) | Small Positive (SP) | |||||||||
| 12 | Positive (P) | Negative (N) | Zero (Z) | |||||||||
| 13 | Positive (P) | Zero (Z) | Medium Positive (MP) | |||||||||
| 14 | Positive (P) | Positive (P) | Large Positive (LP) | |||||||||
| Experiences | Initial | Short-Term | Long-Term | ||
|---|---|---|---|---|---|
| 1st Scenario | 2nd Scenario | ||||
| Weights | (angle) | ||||
| (angular velocity) | |||||
| (torque) | |||||
| (torque derivative) | |||||
| IM | human limb dynamic | Yes | Yes | Yes | |
| known robot’s assistive torque | No | No | Yes | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nasr, A.; Hashemi, A.; McPhee, J. Model-Based Mid-Level Regulation for Assist-As-Needed Hierarchical Control of Wearable Robots: A Computational Study of Human-Robot Adaptation. Robotics 2022, 11, 20. https://doi.org/10.3390/robotics11010020
Nasr A, Hashemi A, McPhee J. Model-Based Mid-Level Regulation for Assist-As-Needed Hierarchical Control of Wearable Robots: A Computational Study of Human-Robot Adaptation. Robotics. 2022; 11(1):20. https://doi.org/10.3390/robotics11010020
Chicago/Turabian StyleNasr, Ali, Arash Hashemi, and John McPhee. 2022. "Model-Based Mid-Level Regulation for Assist-As-Needed Hierarchical Control of Wearable Robots: A Computational Study of Human-Robot Adaptation" Robotics 11, no. 1: 20. https://doi.org/10.3390/robotics11010020
APA StyleNasr, A., Hashemi, A., & McPhee, J. (2022). Model-Based Mid-Level Regulation for Assist-As-Needed Hierarchical Control of Wearable Robots: A Computational Study of Human-Robot Adaptation. Robotics, 11(1), 20. https://doi.org/10.3390/robotics11010020