
A Laser Vision System for Relative 3-D Posture Estimation of an Underwater Vehicle with Hemispherical Optics


Abstract
:1. Introduction
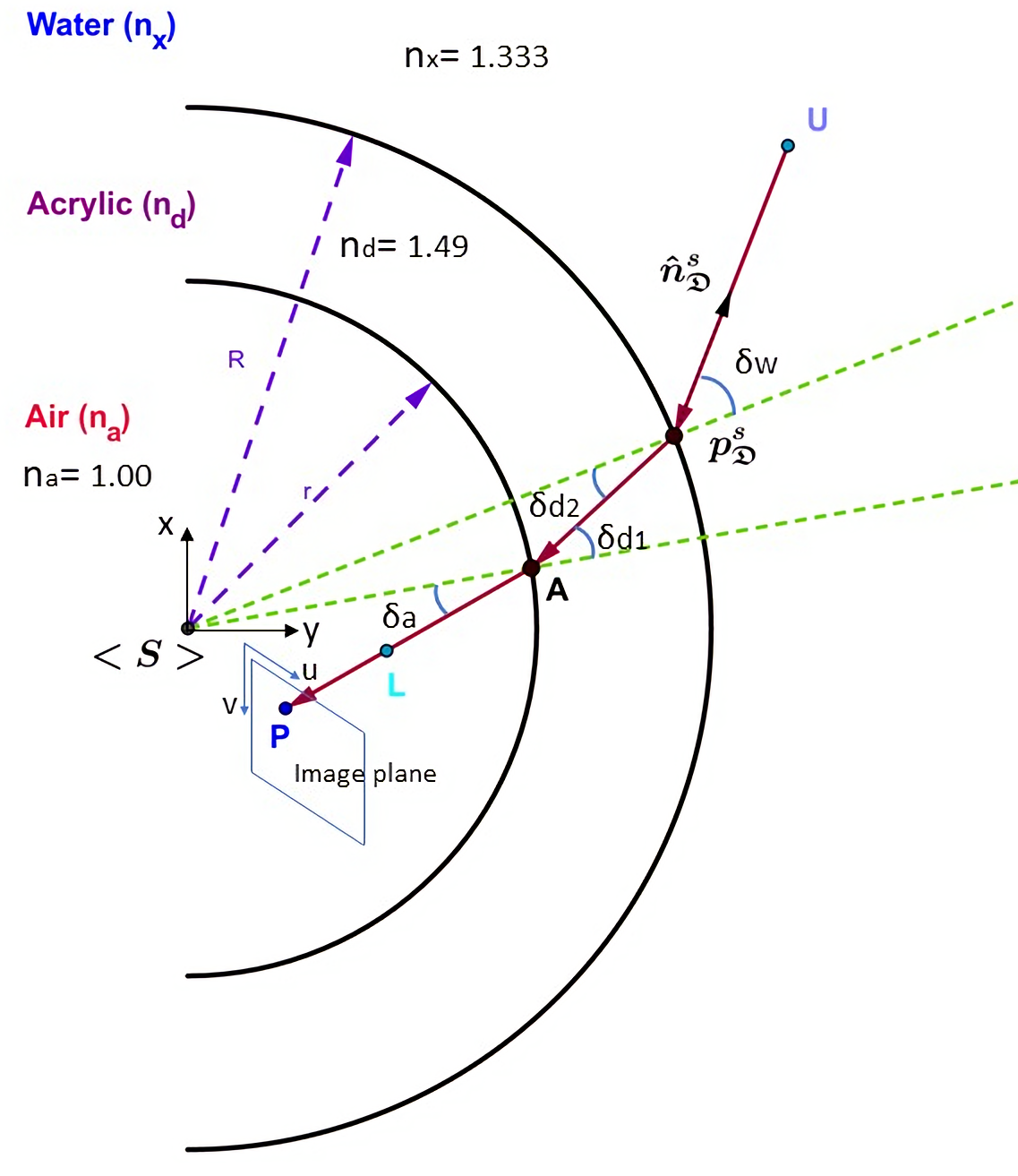
- An analytical model for a three-medium refraction that takes into account the nonlinear hemispherical optics for image rectification and refractive index estimation of the external medium;
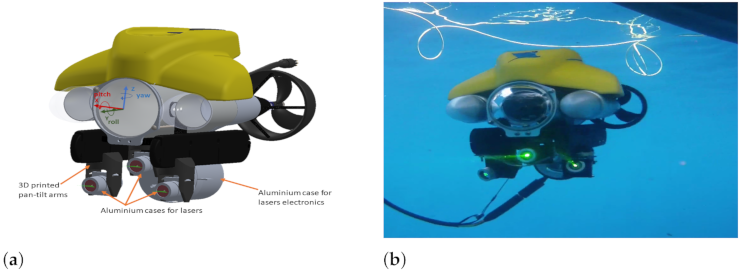
- An automatically calibrated laser vision system (LVS) suitable for measuring the relative posture from both solid and mesh-like targets in underwater environments;
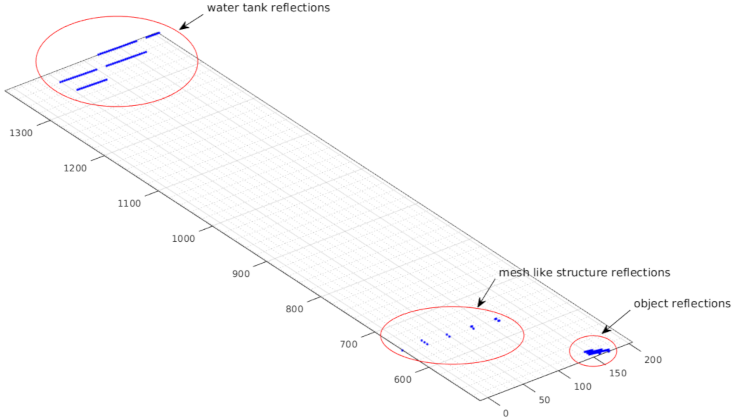
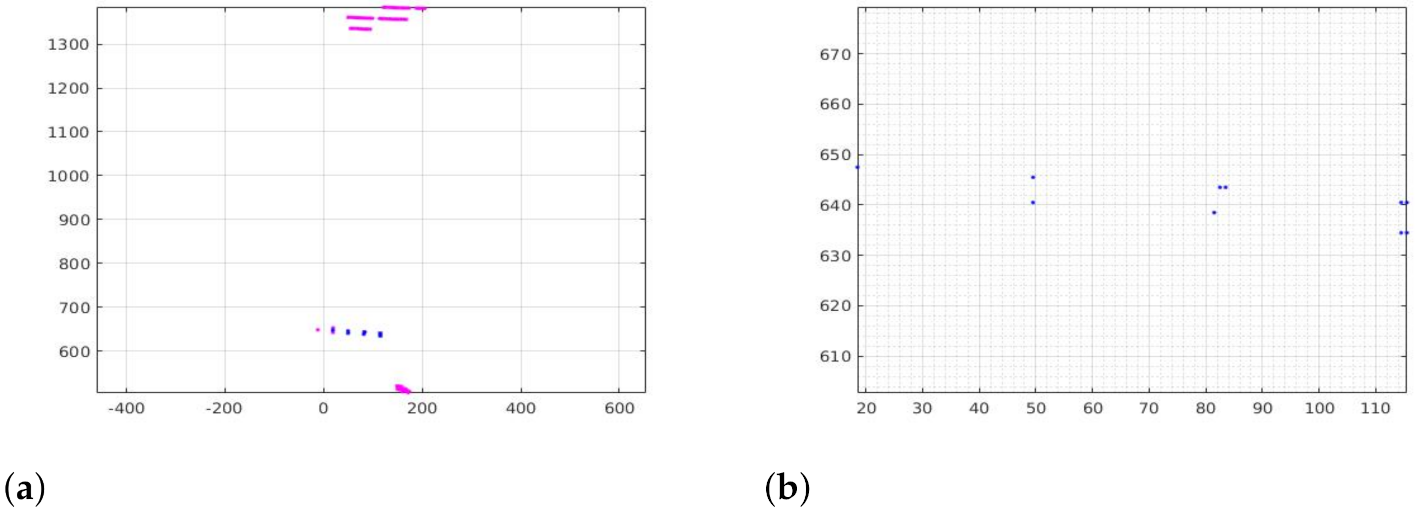
- A spatial filter for discriminating LVS measurements from mesh-like structures and/or measurements from other artifacts in underwater environments.
2. Three-Medium Refractive Model, Calibration and Adaptation
2.1. Analytical Model
2.2. Model Calibration and Adaptive Refractive Index
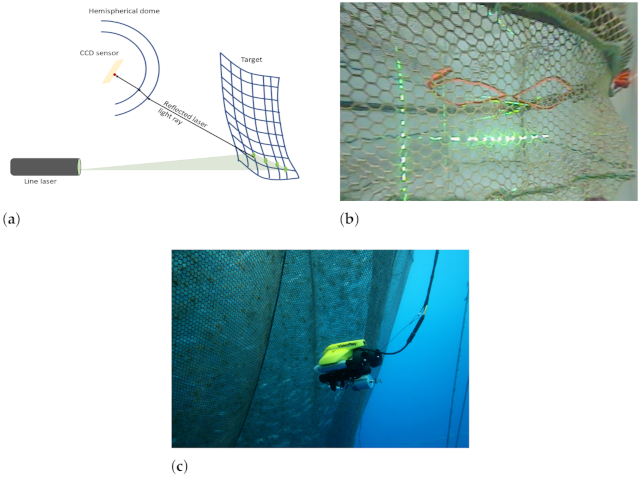
3. Laser Vision System (LVS)
3.1. Approach
3.2. Relative 3-D Posture Estimation to Mesh-like Targets
3.3. Automatic Calibration
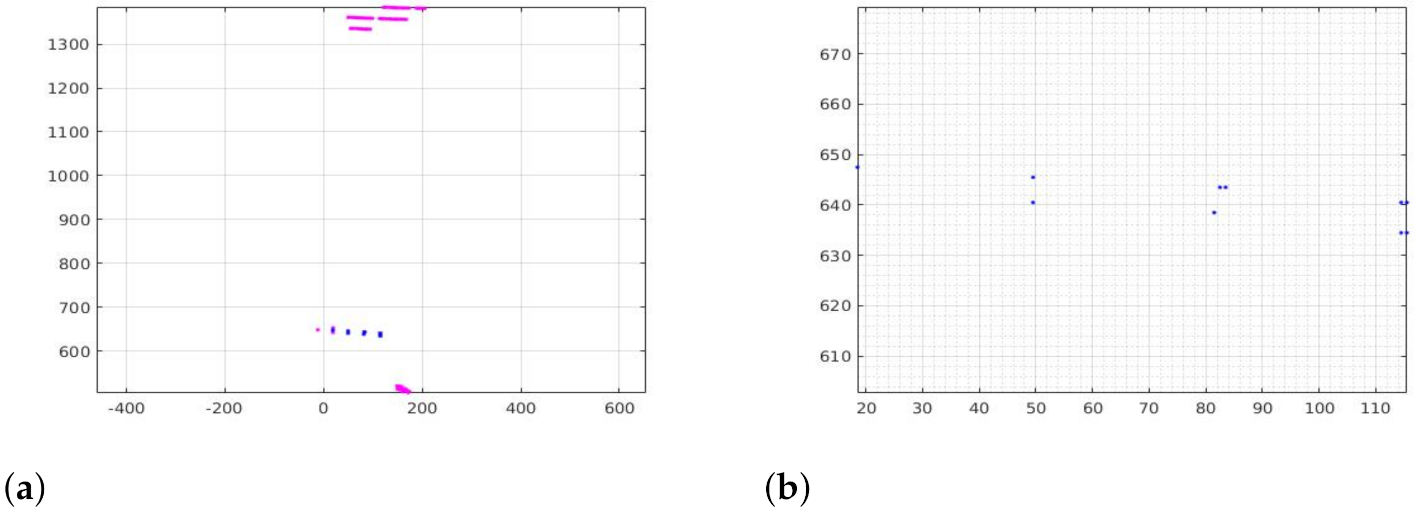
4. A Filter for Mesh-like Structures
4.1. Preliminaries
4.2. Approach
4.2.1. Laser Plane Image
4.2.2. Binary Image Processing Filter
| Algorithm 1 Mesh filter algorithm |
| Require:, , , |
| Ensure: Mesh Reflections from mesh-like structure |
| 1: loop |
| 2: ← |
| 3: if then |
| 4: if then |
| 5: if then |
| 6: ← 1 |
| 7: end if |
| 8: end if |
| 9: end if |
| 10: end loop |
| 11: k← 1 |
| 12: loop |
| 13: if then |
| 14: ←, |
| 15: L← |
| 16: loop |
| 17: ← |
| 18: k← |
| 19: end loop |
| 20: end if |
| 21: end loop |
| 22: return |
5. Experiments
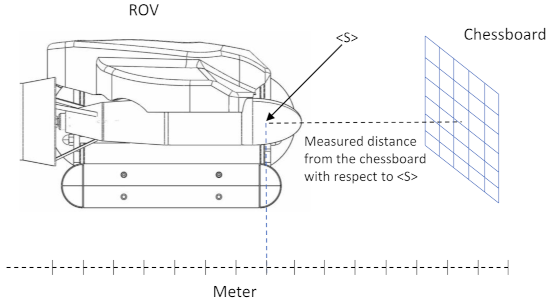
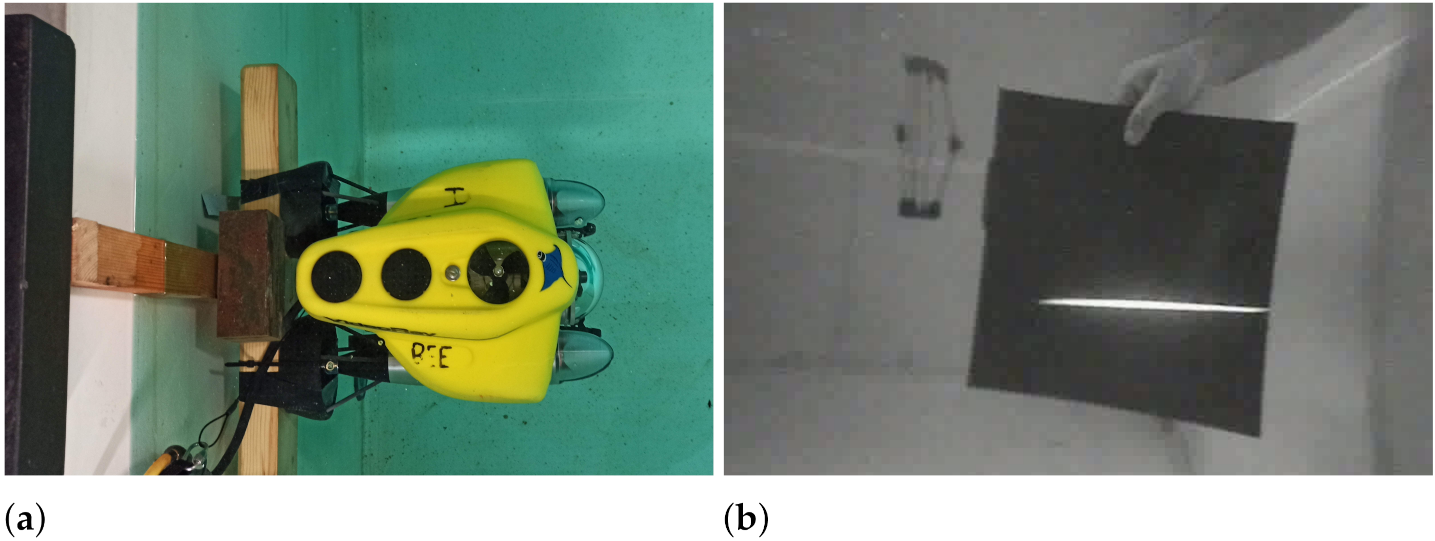
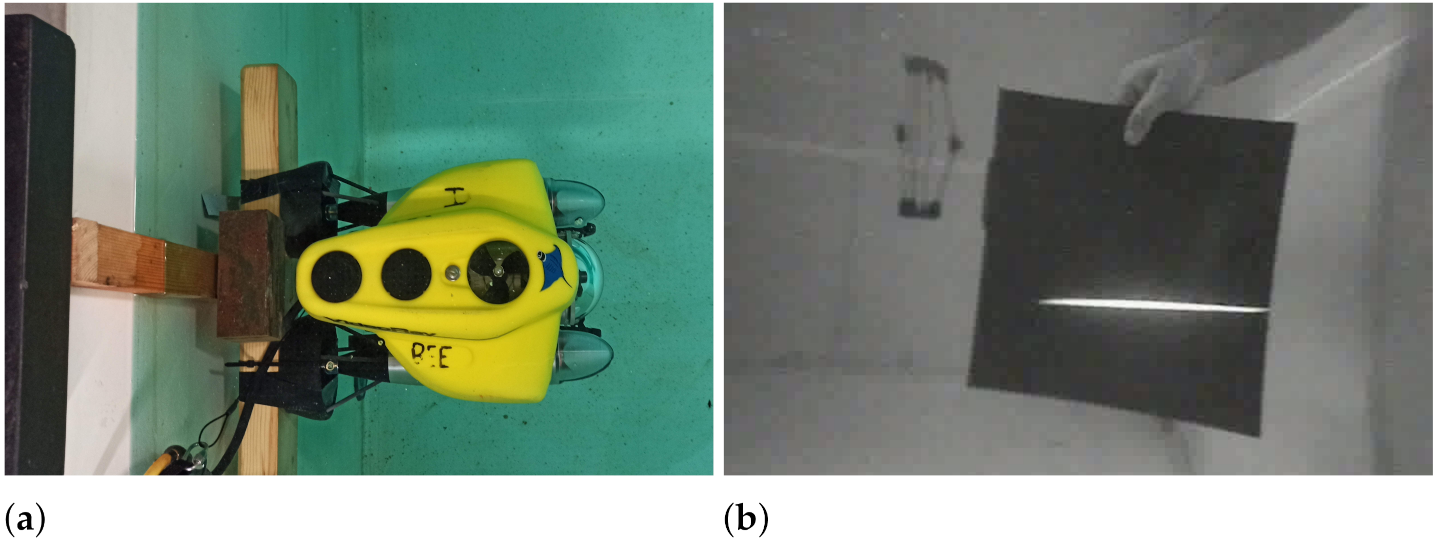
5.1. Experimental Setup
5.2. Experimental Evaluation of the Mesh Filter Algorithm
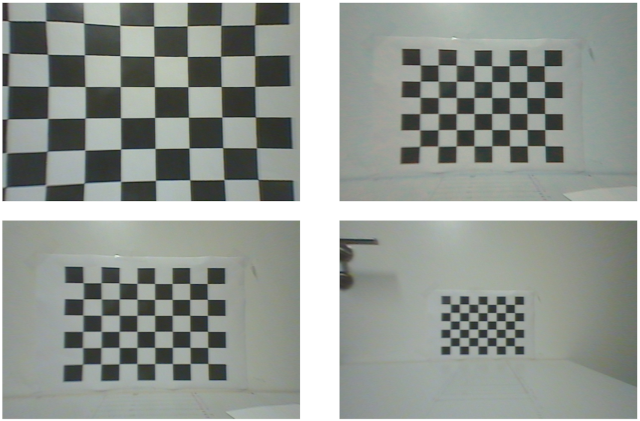
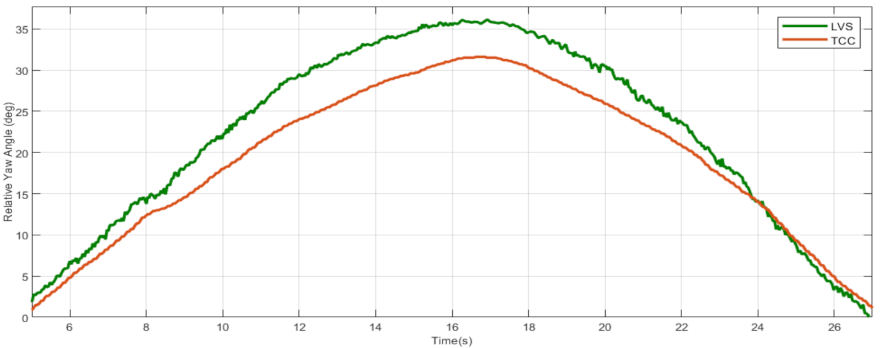
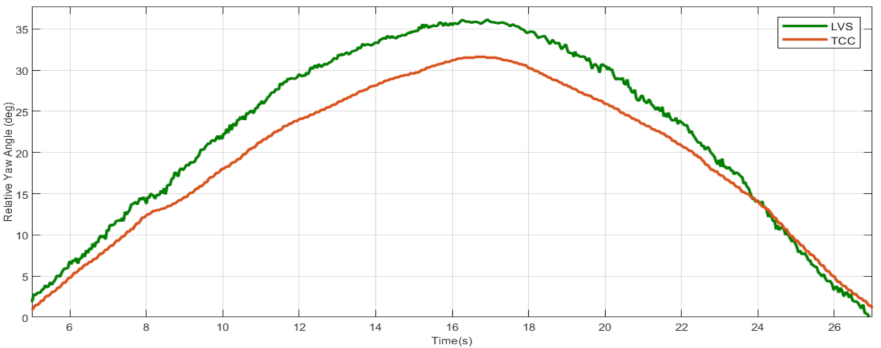
5.3. Experimental Evaluation of the LVS in the Laboratory
5.4. LVS-Effect of Dome Model
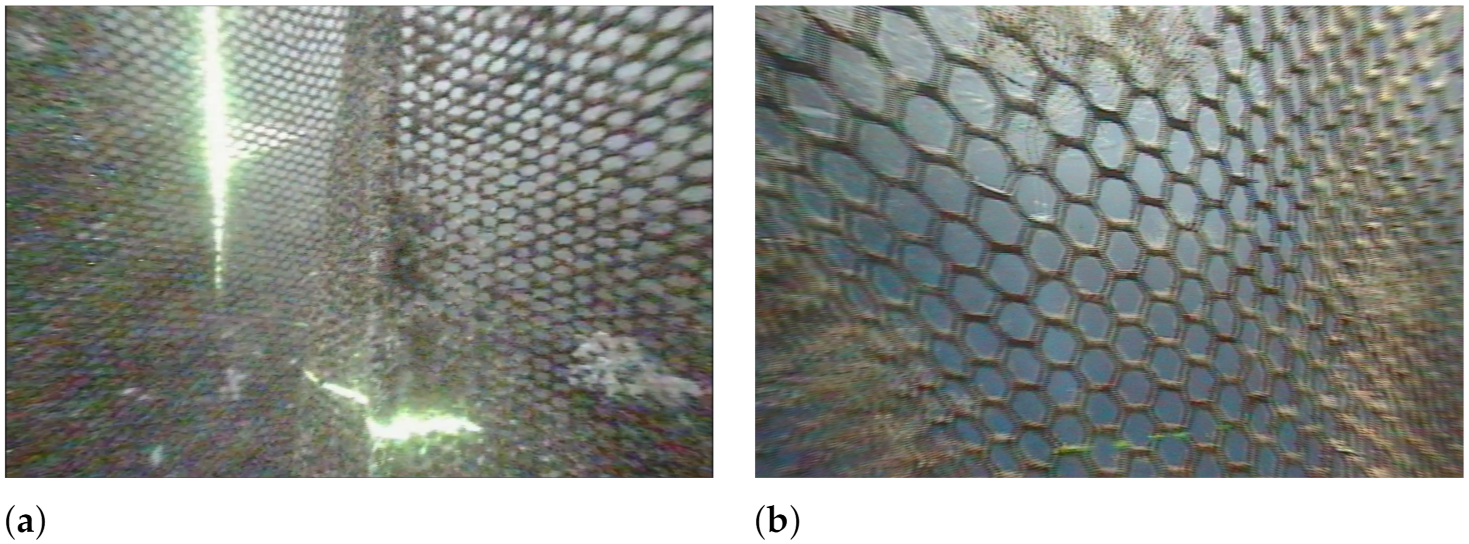
5.5. Testing the LVS System at an Offshore Aquaculture Installation
- Shape of fishnet wall is not a flat surface;
- Shape of fishnet wall is not the same around the fish cage. Mooring and fishnet stitching and support alter the shape that would ideally be circular;
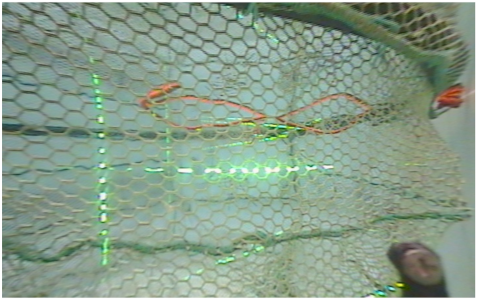
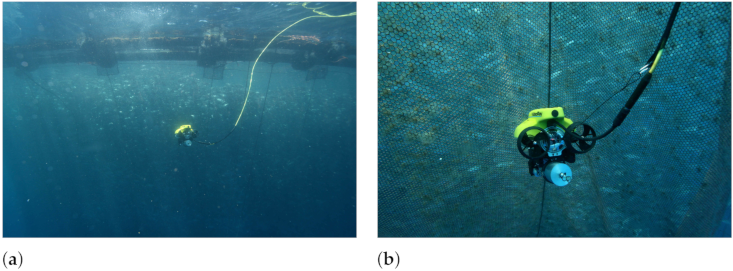
- Fishnet shape dynamically changes with sea currents. Folds and wavy surface features could develop on the fishnet surface during operation as can be seen in Figure 21a;
- Fishnet shape obtains altered by marine growth due to surface deposits altering shape, and weight of marine growth on net and mooring lines pulling unevenly at both static and dynamic current direction conditions;
- ROV position being altered by sea currents, forcing control manoeuvres to keep the required position.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yuh, J. Design and control of autonomous underwater robots: A survey. Auton. Robot. 2000, 8, 7–24. [Google Scholar] [CrossRef]
- Whitcomb, L.L. Underwater robotics: Out of the research laboratory and into the field. In Proceedings of the 2000 ICRA, Millennium Conference, IEEE International Conference on Robotics and Automation, Symposia Proceedings, San Francisco, CA, USA, 24–28 April 2000; Volume 1, pp. 709–716. [Google Scholar]
- Bogue, R. Underwater robots: A review of technologies and applications. Ind. Robot. Int. J. 2015, 42, 186–191. [Google Scholar] [CrossRef]
- Constantinou, C.C.; Loizou, S.G.; Georgiades, G.P.; Potyagaylo, S.; Skarlatos, D. Adaptive calibration of an underwater robot vision system based on hemispherical optics. In Proceedings of the Autonomous Underwater Vehicles (AUV), 2014 IEEE/OES, Oxford, MS, USA, 6–9 October 2014; pp. 1–5. [Google Scholar]
- Constantinou, C.C.; Loizou, S.G.; Georgiades, G.P. An underwater laser vision system for relative 3-D posture estimation to mesh-like targets. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 2036–2041. [Google Scholar]
- Tsai, R.Y. A versatile camera calibration technique for high-accuracy 3D machine vision metrology using off-the-shelf TV cameras and lenses. IEEE J. Robot. Autom. 1987, 3, 323–344. [Google Scholar] [CrossRef] [Green Version]
- Heikkila, J.; Silvén, O. A four-step camera calibration procedure with implicit image correction. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Juan, PR, USA, 17–19 June 1997; pp. 1106–1112. [Google Scholar]
- Treibitz, T.; Schechner, Y.Y.; Kunz, C.; Singh, H. Flat refractive geometry. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 51–65. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jordt-Sedlazeck, A.; Koch, R. Refractive calibration of underwater cameras. Comput. Vis. ECCV 2012, 7576, 846–859. [Google Scholar]
- Kunz, C.; Singh, H. Hemispherical refraction and camera calibration in underwater vision. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–7. [Google Scholar]
- Castillón, M.; Palomer, A.; Forest, J.; Ridao, P. State of the Art of Underwater Active Optical 3D Scanners. Sensors 2019, 19, 5161. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ribo, M.; Brandner, M. State of the art on vision-based structured light systems for 3D measurements. In Proceedings of the International Workshop on Robotic Sensors: Robotic and Sensor Environments, Ottawa, ON, Canada, 30 September–1 October 2005; pp. 2–6. [Google Scholar]
- Roman, C.; Inglis, G.; Rutter, J. Application of structured light imaging for high resolution mapping of underwater archaeological sites. In Proceedings of the OCEANS 2010, Sydney, NSW, Australia, 24–27 May 2010; pp. 1–9. [Google Scholar]
- Czajewski, W.; Sluzek, A. Development of a laser-based vision system for an underwater vehicle. In Proceedings of the International Symposium on Industrial Electronics, ISIE’99, Bled, Slovenia, 12–16 July 1999; Volume 1, pp. 173–177. [Google Scholar]
- Karras, G.C.; Panagou, D.J.; Kyriakopoulos, K.J. Target-referenced localization of an underwater vehicle using a laser-based vision system. In Proceedings of the OCEANS 2006, Boston, MA, USA, 18–21 September 2006; pp. 1–6. [Google Scholar]
- Wang, C.; Shyue, S.; Hsu, H.; Sue, J.; Huang, T. CCD camera calibration for underwater laser scanning system. In Proceedings of the OCEANS 2001, MTS/IEEE Conference and Exhibition, Honolulu, HI, USA, 5–8 November 2001; Volume 4, pp. 2511–2517. [Google Scholar]
- Cain, C.; Leonessa, A. Laser based rangefinder for underwater applications. In Proceedings of the American Control Conference (ACC), Montreal, QC, Canada, 27–29 June 2012; pp. 6190–6195. [Google Scholar]
- Hansen, N.; Nielsen, M.C.; Christensen, D.J.; Blanke, M. Short-Range Sensor for Underwater Robot Navigation using Line-lasers and Vision. IFAC-PapersOnLine 2015, 48, 113–120. [Google Scholar] [CrossRef] [Green Version]
- Lopes, F.; Silva, H.; Almeida, J.M.; Martins, A.; Silva, E. Structured light system for underwater inspection operations. In Proceedings of the OCEANS 2015, Genova, Italy, 18–21 May 2015; pp. 1–6. [Google Scholar]
- Muljowidodo, K.; Rasyid, M.A.; SaptoAdi, N.; Budiyono, A. Vision based distance measurement system using single laser pointer design for underwater vehicle. Indian J. Mar. Sci. 2009, 38, 324–331. [Google Scholar]
- Bleier, M.; Nüchter, A. Low-Cost 3D Laser Scanning in Air Orwater Using Self-Calibrating Structured Light. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42, 105. [Google Scholar] [CrossRef] [Green Version]
- Matos, G.; Buschinelli, P.; Pinto, T. Underwater Laser Triangulation Sensor Model with Flat Refractive Interfaces. IEEE J. Ocean. Eng. 2020, 45, 937–945. [Google Scholar] [CrossRef]
- Palomer, A.; Ridao, P.; Forest, J.; Ribas, D. Underwater laser scanner: Ray-based model and calibration. IEEE/ASME Trans. Mechatronics 2019, 24, 1986–1997. [Google Scholar] [CrossRef]
- Chantler, M.J.; Clark, J.; Umasuthan, M. Calibration and operation of an underwater laser triangulation sensor: The varying baseline problem. Opt. Eng. 1997, 36, 2604–2611. [Google Scholar] [CrossRef]
- AQUABOT. 2018. Available online: www.aquaculturebot.com (accessed on 10 May 2018).
- Lourakis, M.I. A brief description of the Levenberg-Marquardt algorithm implemented by levmar. Found. Res. Technol. 2005, 4, 1–6. [Google Scholar]
- Wozniak, B.; Dera, J. Light Absorption in Sea Water; Springer: New York, NY, USA, 2007; Volume 33. [Google Scholar]
- Bradski, G.; Kaehler, A. Learning OpenCV: Computer Vision with the OpenCV Library; O’Reilly Media, Inc.: Sebastopol, CA, USA, 2008; ISBN 9780596516130. [Google Scholar]
- Xu, B. Identifying fabric structures with fast Fourier transform techniques. Text. Res. J. 1996, 66, 496–506. [Google Scholar]
- Quigley, M.; Faust, J.; Foote, T.; Leibs, J. ROS: An open-source Robot Operating System. ICRA Workshop Open Source Softw. 2009, 3, 5. Available online: www.ros.org (accessed on 10 September 2021).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model Parameters | Values |
|---|---|
| Focal Length | 5.485 mm |
| Dome internal radius | 44.25 mm |
| Dome thickness | 5.75 mm |
| Air refractive index | 1.0003 |
| Acrylic refractive index | 1.4900 |
| Water refractive index | 1.3333 |
| Camera’s rotation | (0.043845, 0.022941, 0.198184) rad |
| Lens’ position in the dome | (3.0, 41.531687, 3.0) mm |
| Image plane rotation | (−0.0012367, −0.001061, −0.011228) rad |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Constantinou, C.C.; Georgiades, G.P.; Loizou, S.G. A Laser Vision System for Relative 3-D Posture Estimation of an Underwater Vehicle with Hemispherical Optics. Robotics 2021, 10, 126. https://doi.org/10.3390/robotics10040126
Constantinou CC, Georgiades GP, Loizou SG. A Laser Vision System for Relative 3-D Posture Estimation of an Underwater Vehicle with Hemispherical Optics. Robotics. 2021; 10(4):126. https://doi.org/10.3390/robotics10040126
Chicago/Turabian StyleConstantinou, Christos C., George P. Georgiades, and Savvas G. Loizou. 2021. "A Laser Vision System for Relative 3-D Posture Estimation of an Underwater Vehicle with Hemispherical Optics" Robotics 10, no. 4: 126. https://doi.org/10.3390/robotics10040126
APA StyleConstantinou, C. C., Georgiades, G. P., & Loizou, S. G. (2021). A Laser Vision System for Relative 3-D Posture Estimation of an Underwater Vehicle with Hemispherical Optics. Robotics, 10(4), 126. https://doi.org/10.3390/robotics10040126