
OntoSLAM: An Ontology for Representing Location and Simultaneous Mapping Information for Autonomous Robots

 ,
,  ,
,  ,
, 
Abstract
:1. Introduction
2. Related Work
- 1.
- Robot Information (RI): Conceptualizes the main characteristics of the robot, its physical and structural capabilities. It additionally considers the location, with its correlative uncertainty, of the robot in a map and its pose, because according to that the robot could act differently within its environment. It considers the following aspects:
- (a)
- Robot kinematic information: It is related to the mobility capacity and degrees of freedom of each part of the robot.
- (b)
- Robot sensory information: It refers to the different sensors that robots use to explore the world.
- (c)
- Robot pose information: To model the information related to the robot’s location and position and orientation associated with its degrees of freedom.
- (d)
- Robot trajectory information: To represent information related to the association of a sequence of certain poses with respect to time.
- (e)
- Robot position uncertainty: There is an uncertainty related to a set of positions in which the robot could be. Therefore, it is necessary to model the possible positions and the actual positions of the robot.
- 2.
- Environment Mapping (EM): Represents the robot’s ability to describe the environment in which it is located, including other objects than robots. This category contemplates objects main features such as color and dimensions, as well as position and uncertainty of that position. This modeling capability is what opens the possibility of a more complex SLAM, since if robots are able to differentiate objects from their environments, they have the ability to locate itself either quantitatively or qualitatively with respect to such objects. It includes the following subcategories:
- (a)
- Geographical information: It refers to the modeling of physical spaces mapped by the robot, comprising simple areas (such as an office) and complex areas (such as a building with its interior offices).
- (b)
- Landmark basic information (position): It models the objects and their position with respect to the map generated by the robot, while dealing with the SLAM problem.
- (c)
- Landmark shape information: It refers to the characteristics of each object, related to its size, shape, and composition. In some environments, the robot could have the ability to decompose landmarks into simpler parts and the ontology would allow it to model this.
- (d)
- Landmark position uncertainty: Analogous to the uncertainty of the robot’s position in the first category, this subcategory seeks to model the uncertainty of the position of each of the landmarks found in the environment.
- 3.
- Timely Information (TI): Related to the capability of modeling a path of the robot, representing its movements—i.e., where it has moved and for how long it has remained in that movement or position. The aspects considered in this category are:
- (a)
- Time information of robots and objects: To consider the space-time relationship of the robot’s positions.
- (b)
- Mobile objects: It models objects that may be in one position at one instant in time and the next instant no longer be present in that position, either because it moved (e.g., a bicycle) or because someone else moved it (e.g., a box).
- 4.
- Workspace Information (WI): Models the general characteristics of the environment being mapped, such as its dimensional space, as well as the capacity of modeling entities that belong only to a specific domain. This category includes the following two subcategories:
- (a)
- Dimensions of mapping and localization: It refers to the number of dimensions (2D, 3D) in which the robot determines its localization and performs the mapping of the environment.
- (b)
- Specific domain information: Since it is necessary to solve the SLAM problem in varied environments, it is necessary to be able to model a high-level knowledge of the environment in which the robot is located, also considering the knowledge domain, where SLAM is being applied. Examples of specific knowledge that can be modeled could be related to objects in a museum (for a tourism application) or objects in an office (for a workspace application).
3. OntoSLAM: The Proposal
- ISRO [11]: it is a recent developed ontology in the field of service robotics, with the aim of improving human-robot interactions; therefore, it includes robotic and human agents in its models.
- The ontology proposed by V. Fortes [12]: It will hereafter be referred as FR2013 ontology; it is an ontology aimed at solving the problem of mixing maps when two robots collaboratively map a space; it integrates and extends POS [26] and CORA [10] ontologies (developed by the IEEE-RAS working group) [15], which in turn inherit general concepts from the SUMO ontology [18], that has been highly referenced.
- KnowRob ontology [13]: it is a framework developed for teleoperation environments, designed around a robotic agent, whose main mission is to fetch things and it must perform SLAM to fulfill this mission; therefore, the ontology allows describing the place where it is; this ontology is already developed and tested in ROS, which gives free access to the packages and ontologies developed in this framework.
- They cover at least three of the four SLAM knowledge categories.
- They cover at least one category completely.
- They provide open source or a detailed explanation of the ontology structure, to facilitate the integration and extension of the ontological concepts.
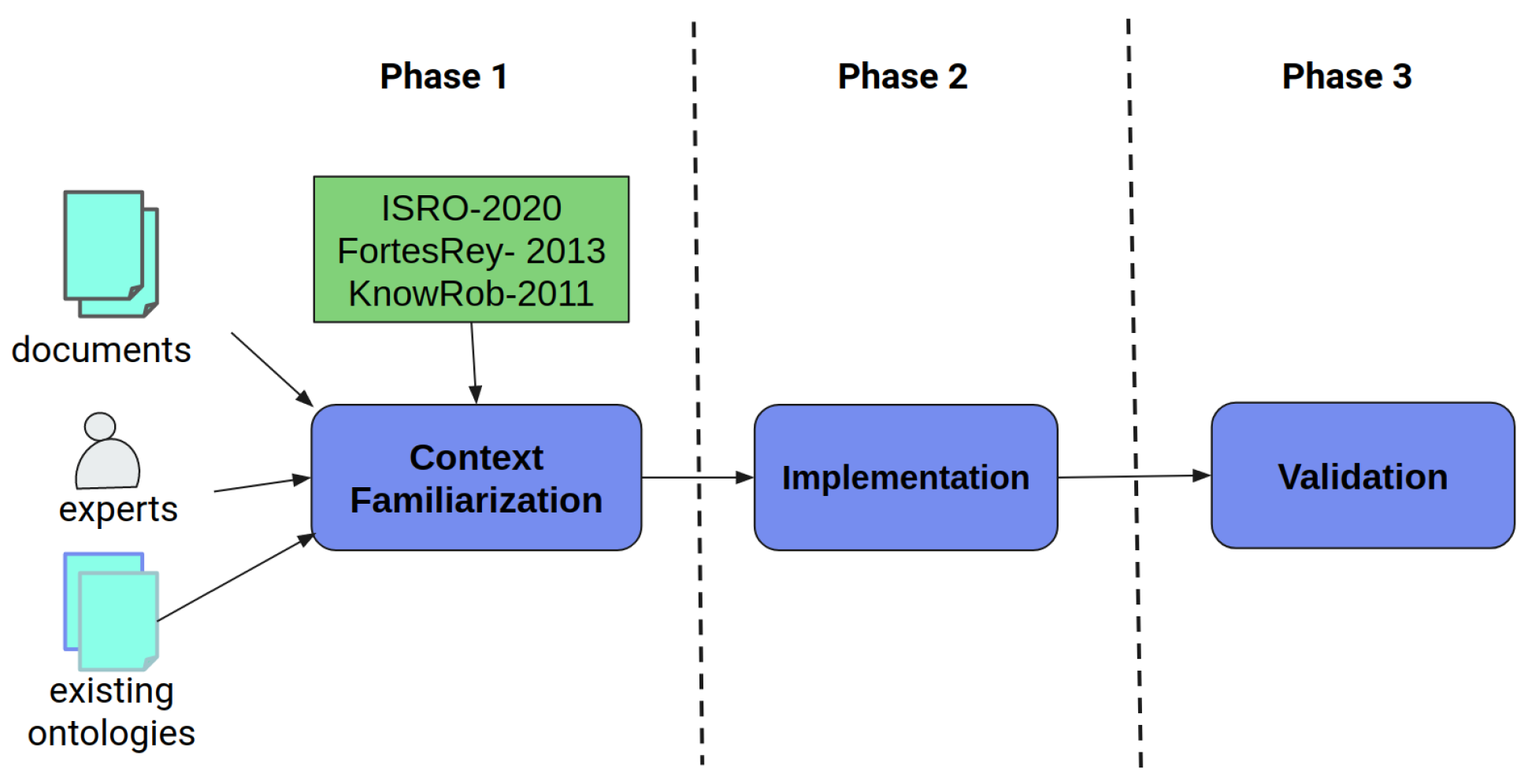
3.1. Context Familiarization
3.2. Implementation
- isro: for ISRO ontology;
- kn: for entities taken from the KnowRob framework;
- fr: refers to the FR2013 ontology;
- cora: is the prefix for CORA ontology;
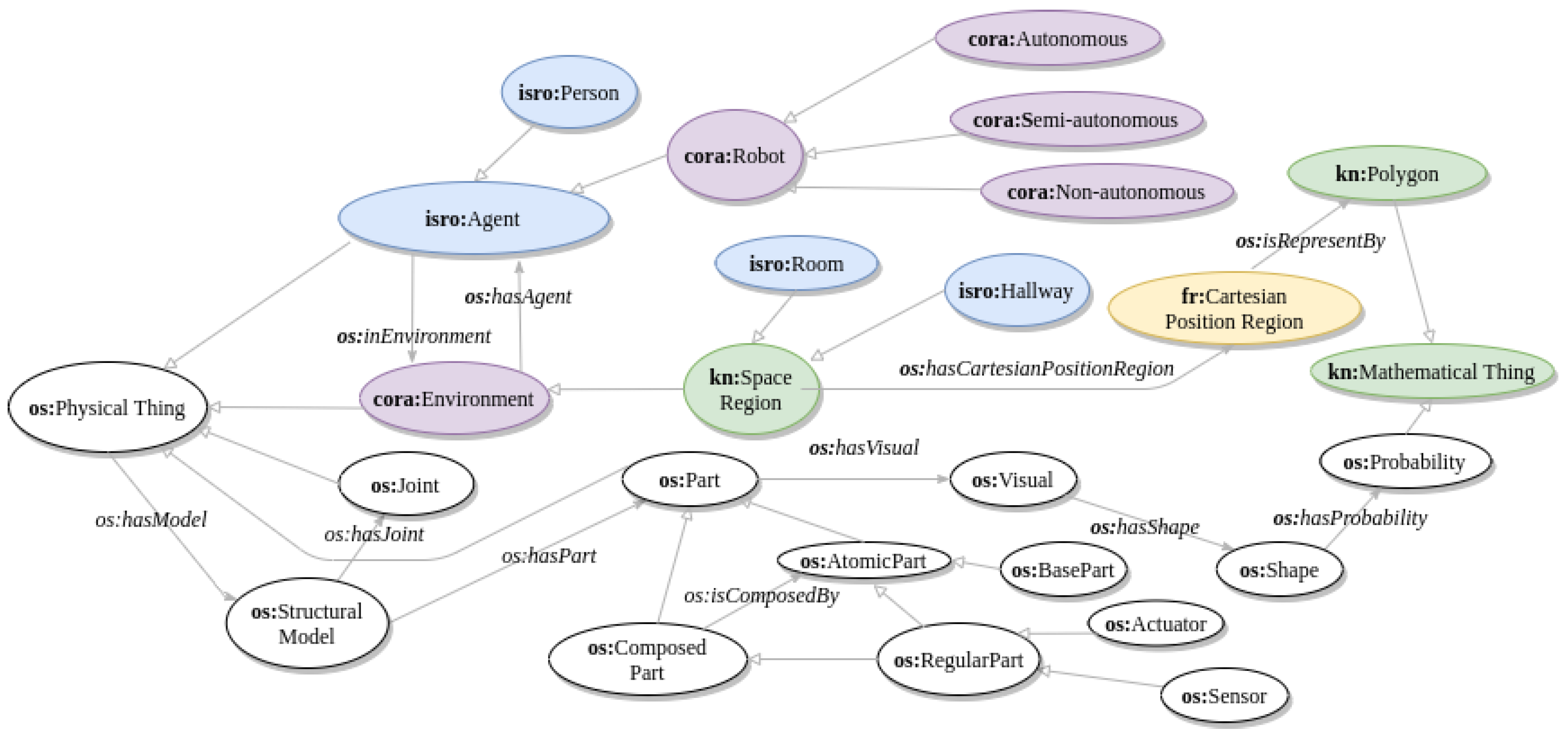
- os: refers to OntoSLAM (the proposal in this work).
- os:PhysicalThing, that denotes all things that occupy a physical space in the environment. It can be (see Figure 3):
- -
- isro:Agent, that denotes an entity that perceives and acts on its environment. This class can be extended to model both robotic and human agents.
- -
- os:Part, that represents the basic building block for modeling an object. A part can be composed of other parts but can also be atomic.
- -
- os:Joint, that models the connection between two parts. It defines the pose of the parts to which it is connected. Every joint must have a connection with two parts.
- -
- cora:Environment, that refers to a region that occupies a physical location in a space.
- os:AbstractThing, that describes things that exist but do not occupy a physical place in the space. It has the following subclasses:
- -
- os:StructuralModel, which represents a set of os:Part and os:Joint. A model describes the whole structure of a physical thing. It is used to describe agents, parts, and environments. All os:PhysicalThing have an os:StructuralModel, linked with the relation os:hasModel.
- -
- kn:MathematicalThing, that denotes all mathematical concepts used during the formalization of the knowledge obtained while solving the SLAM problem. Examples of this class are vectors and matrices.
- -
- os:FeatureThing, which represents the characteristics that a physical thing can have; for example, color or shape.
- -
- isro:TemporalThing, which represents all the entities necessary to model the time associated with the events that occur during the SLAM process. Its main subclasses are: isro:TimePoint and isro:TimeInterval.
- -
- os:PositionalThing, used for concepts related to the positioning of both robots and objects in the working environment.
3.3. Validation
4. OntoSLAM Evaluation
4.1. Ontology Evaluation
4.1.1. Lexical Level
4.1.2. Structural Level
4.1.3. Domain Knowledge Level
- 1.
- Robot Information:
- (a1)
- Does the ontology store the geometry of the robot?
- (a2)
- Does the ontology define a referential system for each robot joint?
- (a3)
- Does the ontology recognize types of articulations?
- (a4)
- Does the ontology allow transformations between referential systems?
- (b1)
- Does the ontology define an own reference systems for each sensor?
- (c1)
- Does the ontology represent the pose of a robot?
- (c2)
- Can represent the relative position of a robot to the objects around it?
- (d1)
- Does it allow storage of a path of the robot and query it?
- (e1)
- Does the ontology conceptualizes the uncertainty of the robot position?
- 2.
- Environment Mapping:
- (a1)
- Does it allow storage of empty spaces and their coordinates?
- (b1)
- Does it differentiate objects around the robot in terms of their name and characteristics?
- (b2)
- Does it allow the representation of the pose of an object in the robot environment?
- (b3)
- Does it allow knowledge of the relative position between objects?
- (c1)
- Does it allow storing the geometry of objects in the environment?
- (c2)
- Does it allow storage of sub-objects of interest in larger objects?
- (c3)
- Does it register objects (other than robots) with joints?
- (d1)
- Does it model the uncertainty of objects position?
- 3.
- Timely information:
- (a1)
- Does it allow storage of the different poses of a robot in time?
- (b1)
- Does it allow storage of the different poses of objects in time?
- 4.
- Workspace:
- (a1)
- Does it clearly indicate the dimensions of the workspace?
- (b1)
- Does it allow the modeling of specific information of the application domain?
4.1.4. OQuaRE Quality Metrics
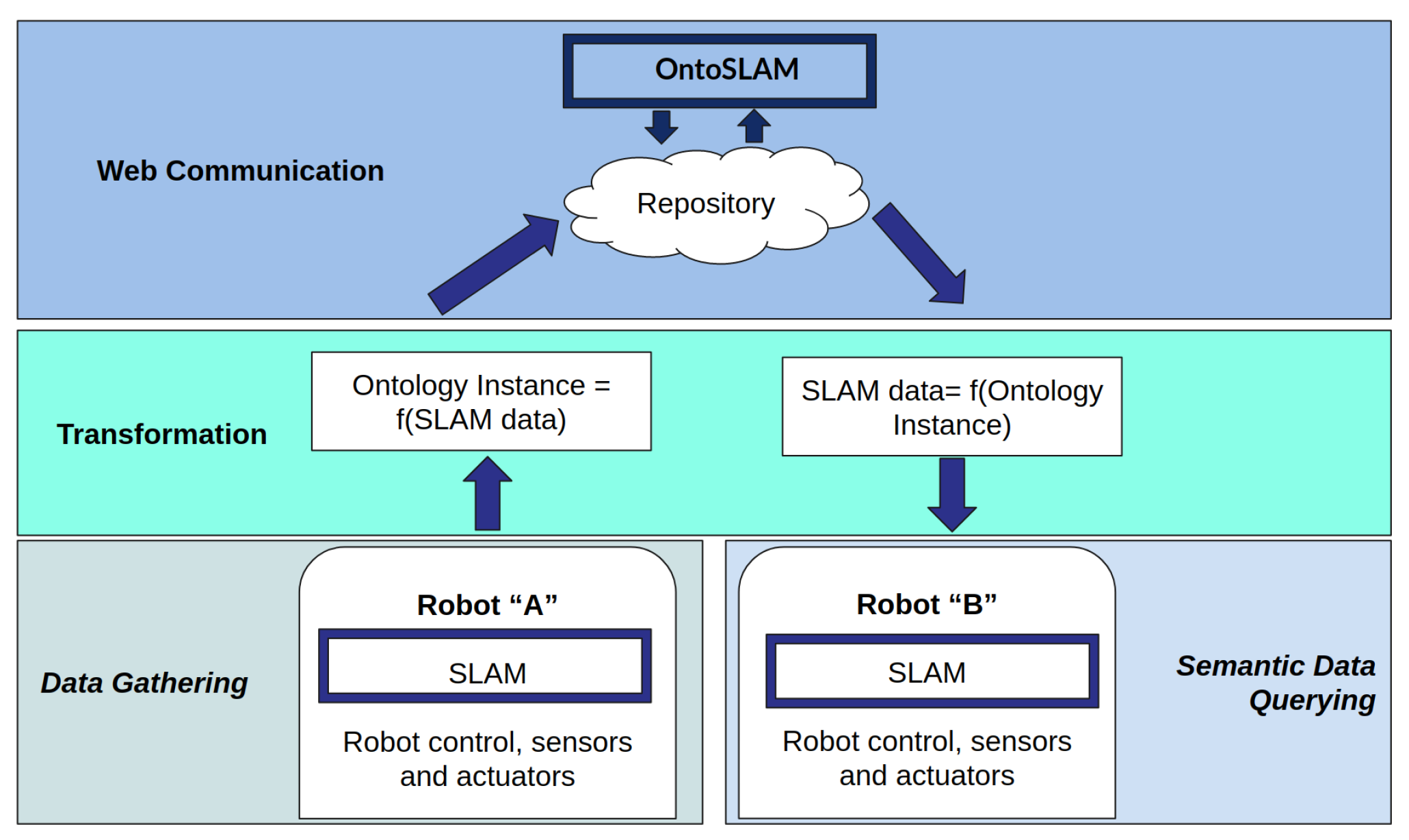
4.2. Applying OntoSLAM in ROS: Case of Study
4.2.1. Data Gathering
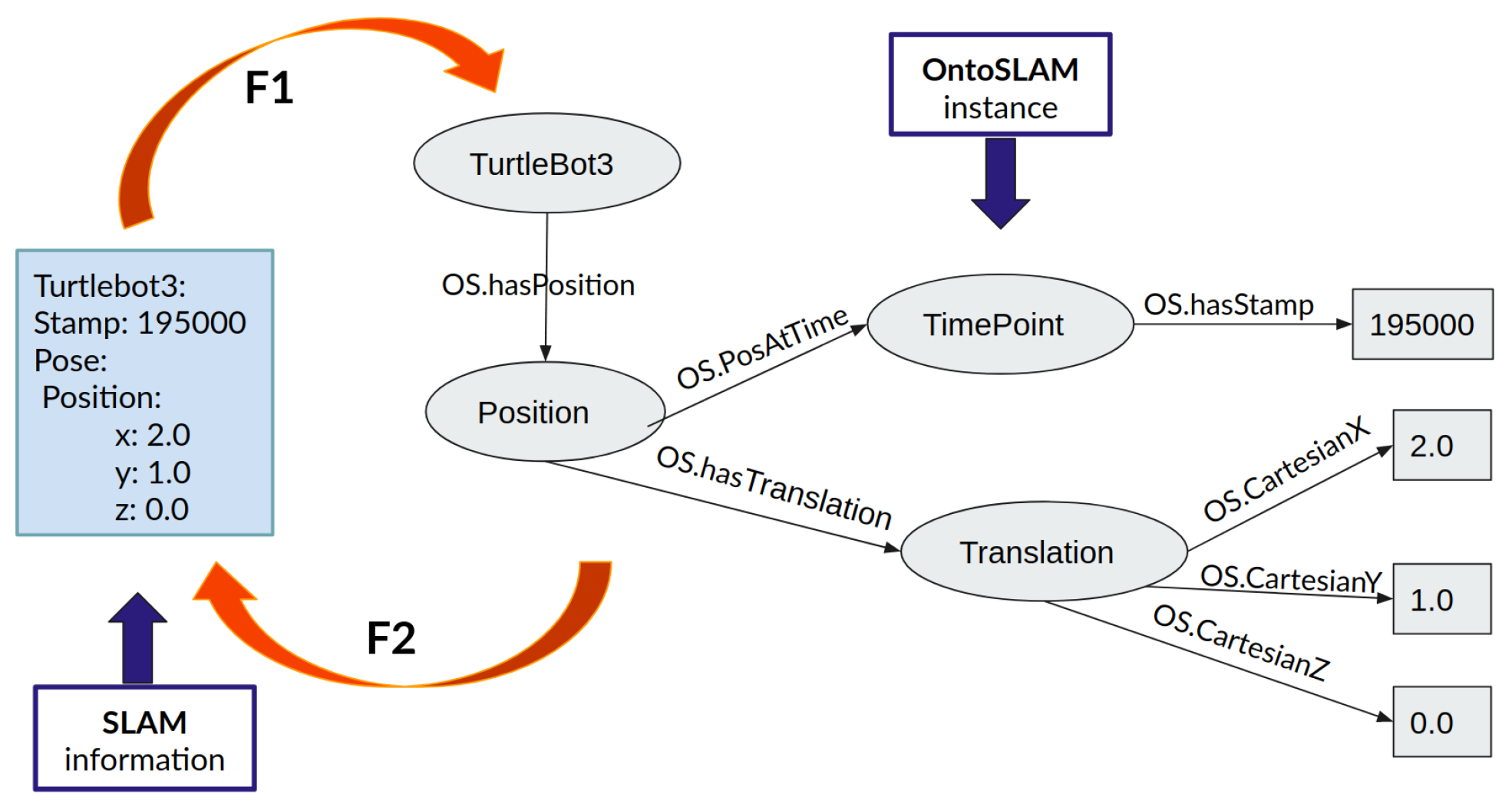
4.2.2. Transformation
- F1
- SlamToOntology: to convert the raw data collected by the robot’s sensors in the previous phase into instances of OntoSLAM. Information such as the name of the robot, its position, and the time at which the information was recorded, will be transformed into a set of RDF triplets that can be seen as a graph. In these experiments, Robot “A” uses this function.
- F2
- OntologyToSlam: to transform ontology instances into SLAM information in ROS format. This function is used by the Robot “B”.
4.2.3. Web Communication
4.2.4. Semantic Data Querying
4.3. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Coeckelbergh, M.; Pop, C.; Simut, R.; Peca, A.; Pintea, S.; David, D.; Vanderborght, B. A survey of expectations about the role of robots in robot-assisted therapy for children with ASD: Ethical acceptability, trust, sociability, appearance, and attachment. Sci. Eng. Ethics 2016, 22, 47–65. [Google Scholar] [CrossRef] [PubMed]
- Ingrand, F.; Ghallab, M. Deliberation for autonomous robots: A survey. Artif. Intell. 2017, 247, 10–44. [Google Scholar] [CrossRef] [Green Version]
- Thrun, S. Robotic Mapping: A Survey. In Exploring Artificial Intelligence in the New Millennium; Morgan Kaufmann Publishers Inc.: San Francisco, CA, USA, 2003; pp. 1–35. [Google Scholar]
- Manzoor, S.; Rocha, Y.G.; Joo, S.H.; Bae, S.H.; Kim, E.J.; Joo, K.J.; Kuc, T.Y. Ontology-Based Knowledge Representation in Robotic Systems: A Survey Oriented toward Applications. Appl. Sci. 2021, 11, 4324. [Google Scholar] [CrossRef]
- Haidegger, T.; Barreto, M.; Gonçalves, P.; Habib, M.K.; Ragavan, S.K.V.; Li, H.; Vaccarella, A.; Perrone, R.; Prestes, E. Applied ontologies and standards for service robots. Robot. Auton. Syst. 2013, 61, 1215–1223. [Google Scholar] [CrossRef]
- Cornejo-Lupa, M.; Ticona-Herrera, R.; Cardinale, Y.; Barrios-Aranibar, D. A categorization of simultaneous localization and mapping knowledge for mobile robots. In Proceedings of the ACM Symposium on Applied Computing, Brno, Czech Republic, 30 March–3 April 2020; pp. 956–963. [Google Scholar]
- Cornejo-Lupa, M.A.; Ticona-Herrera, R.P.; Cardinale, Y.; Barrios-Aranibar, D. A Survey of Ontologies for Simultaneous Localization and Mapping in Mobile Robots. ACM Comput. Surv. (CSUR) 2020, 53, 1–26. [Google Scholar] [CrossRef]
- Belouaer, L.; Bouzid, M.; Mouaddib, A.I. Ontology Based Spatial Planning for Human-Robot Interaction. In Proceedings of the Symposium on Temporal Representation and Reasoning, Paris, France, 6–8 September 2010; pp. 103–110. [Google Scholar]
- Cashmore, M.; Fox, M.; Long, D.; Magazzeni, D.; Ridder, B.; Carrera, A.; Palomeras, N.; Hurtos, N.; Carreras, M. Rosplan: Planning in the robot operating system. In Proceedings of the International Conference on Automated Planning and Scheduling, Jerusalem, Israel, 7–11 June 2015; Volume 25, pp. 333–341. [Google Scholar]
- Prestes, E.; Carbonera, J.L.; Fiorini, S.R.; Jorge, V.A.; Abel, M.; Madhavan, R.; Locoro, A.; Goncalves, P.; Barreto, M.E.; Habib, M.; et al. Towards a core ontology for robotics and automation. Robot. Auton. Syst. 2013, 61, 1193–1204. [Google Scholar] [CrossRef]
- Chang, D.S.; Cho, G.H.; Choi, Y.S. Ontology-based knowledge model for human-robot interactive services. In Proceedings of the 35th Annual ACM Symposium on Applied Computing, Brno, Czech Republic, 30 March–3 April 2020; pp. 2029–2038. [Google Scholar]
- Fortes, V. A Positioning Ontology for C-SLAM; Monograph; UFRGS—Curso de Bacharelado em Ciencia da Computacao: Rio Grande do Sul, Brazil, 2013; pp. 23–33. [Google Scholar]
- Tenorth, M.; Beetz, M. KNOWROB: Knowledge processing for autonomous personal robots. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St Louis, MO, USA, 10–15 October 2009; pp. 4261–4266. [Google Scholar]
- Koenig, N.; Howard, A. Design and use paradigms for gazebo, an open-source multi-robot simulator. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Cat. No. 04CH37566), Sendai, Japan, 28 September–2 October 2004; IEEE: Piscataway, NJ, USA, 2004; Volume 3, pp. 2149–2154. [Google Scholar]
- Schlenoff, C.; Messina, E. A Robot Ontology for Urban Search and Rescue. In Proceedings of the 2005 ACM Workshop on Research in Knowledge Representation for Autonomous Systems, Bremen, Germany, 4 November 2005; pp. 27–34. [Google Scholar]
- Mozos, O.M.; Jensfelt, P.; Zender, H.; Kruijff, G.J.M.; Burgard, W. From Labels to Semantics: An Integrated System for Conceptual Spatial Representations of Indoor Environments for Mobile Robots. In Proceedings of the IROS 2007 Workshop: From Sensors to Human Spatial Concepts (FS2HSC), San Diego, CA, USA, 2 November 2007; pp. 25–32. [Google Scholar]
- Suh, I.H.; Lim, G.H.; Hwang, W.; Suh, H.; Choi, J.H.; Park, Y.T. Ontology-based multi-layered robot knowledge framework (OMRKF) for robot intelligence. In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; IEEE: Piscataway, NJ, USA, 2007; pp. 429–436. [Google Scholar]
- Eid, M.; Liscano, R.; El Saddik, A. A Universal Ontology for Sensor Networks Data. In Proceedings of the Computational Intelligence for Measurement Systems and Applications, Ostuni, Italy, 27–29 June 2007; pp. 59–62. [Google Scholar]
- Lim, G.H.; Suh, I.H.; Suh, H. Ontology-Based Unified Robot Knowledge for Service Robots in Indoor Environments. Syst. Man Cybern. 2011, 41, 492–509. [Google Scholar] [CrossRef]
- Dhouib, S.; Du Lac, N.; Farges, J.L.; Gerard, S.; Hemaissia-Jeannin, M.; Lahera-Perez, J.; Millet, S.; Patin, B.; Stinckwich, S. Control architecture concepts and properties of an ontology devoted to exchanges in mobile robotics. In Proceedings of the 6th National Conference on Control Architectures of Robot, Grenoble, France, 24–25 May 2011; pp. 24–30. [Google Scholar]
- Pronobis, A.; Jensfelt, P. Multi-modal semantic mapping. In Proceedings of the RSS Workshop on Grounding Human-Robot Dialog for Spatial Tasks, Los Angeles, CA, USA, 1 July 2011. [Google Scholar]
- Wang, T.; Chen, Q. Object semantic map representation for indoor mobile robots. In Proceedings of the 2011 International Conference on System Science and Engineering, Macau, China, 8–10 June 2011; pp. 309–313. [Google Scholar]
- Hotz, L.; Rost, P.; von Riegen, S. Combining qualitative spatial reasoning and ontological reasoning for supporting robot tasks. In Proceedings of the International Conference on Knowledge Engineering and Ontology Development, Barcelona, Spain, 4–7 October 2012; pp. 377–380. [Google Scholar]
- Paull, L.; Severac, G.; Raffo, G.V.; Angel, J.M.; Boley, H.; Durst, P.J.; Gray, W.; Habib, M.; Nguyen, B.; Ragavan, S.V.; et al. Towards an Ontology for Autonomous Robots. In Proceedings of the Conference on Intelligent Robots and Systems, Algarve, Portugal, 7–12 October 2012; pp. 1359–1364. [Google Scholar]
- Li, R.; Wei, L.; Gu, D.; Hu, H.; McDonald-Maier, K. Multi-layered map based navigation and interaction for an intelligent wheelchair. In Proceedings of the Robotics and Biomimetics, Shenzhen, China, 12–14 December 2013; pp. 115–120. [Google Scholar]
- Carbonera, J.; Fiorini, S.; Prestes, E.; Jorge, V.; Abel, M.; Madhavan, R.; Locoro, A.; Gonçalves, P.; Haidegger, T.; Schlenoff, C. Defining positioning in a core ontology for robotics. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 1867–1872. [Google Scholar]
- Wu, H.; Tian, G.h.; Li, Y.; Zhou, F.y.; Duan, P. Spatial semantic hybrid map building and application of mobile service robot. Robot. Auton. Syst. 2014, 62, 923–941. [Google Scholar] [CrossRef]
- Riazuelo, L.; Tenorth, M.; Di Marco, D.; Salas, M.; Gálvez-López, D.; Mösenlechner, L.; Kunze, L.; Beetz, M.; Tardós, J.D.; Montano, L.; et al. RoboEarth Semantic Mapping: A Cloud Enabled Knowledge-Based Approach. IEEE Trans. Autom. Sci. Eng. 2015, 12, 432–443. [Google Scholar] [CrossRef] [Green Version]
- Burroughes, G.; Gao, Y. Ontology-Based Self-Reconfiguring Guidance, Navigation, and Control for Planetary Rovers. J. Aerosp. Inf. Sys. 2016, 13, 1–13. [Google Scholar] [CrossRef]
- Ramos, F.; Vázquez, A.S.; Fernández, R.; Olivares-Alarcos, A. Ontology based design, control and programming of modular robots. Integr.-Comput.-Aided Eng. 2018, 25, 173–192. [Google Scholar] [CrossRef]
- Deeken, H.; Wiemann, T.; Hertzberg, J. Grounding semantic maps in spatial databases. Robot. Auton. Syst. 2018, 105, 146–165. [Google Scholar] [CrossRef]
- Sun, X.; Zhang, Y.; Chen, J. High-Level Smart Decision Making of a Robot Based on Ontology in a Search and Rescue Scenario. Future Internet 2019, 11, 230. [Google Scholar] [CrossRef] [Green Version]
- Crespo, J.; Castillo, J.C.; Mozos, O.; Barber, R. Semantic Information for Robot Navigation: A Survey. Appl. Sci. 2020, 10, 497. [Google Scholar] [CrossRef] [Green Version]
- Joo, S.H.; Manzoor, S.; Rocha, Y.G.; Bae, S.H.; Lee, K.H.; Kuc, T.Y.; Kim, M. Autonomous navigation framework for intelligent robots based on a semantic environment modeling. Appl. Sci. 2020, 10, 3219. [Google Scholar] [CrossRef]
- Karimi, S.; Iordanova, I.; St-Onge, D. An ontology-based approach to data exchanges for robot navigation on construction sites. arXiv 2021, arXiv:2104.10239. [Google Scholar] [CrossRef]
- Shchekotov, S.; Smirnov, N.; Pashkin, M. The ontology driven SLAM based indoor localization technique. J. Phys. Conf. Ser. 2021, 1801, 012007. [Google Scholar] [CrossRef]
- Cardinale, Y.; Cornejo-Lupa, M.; Ticona-Herrera, R.; Barrios-Aranibar, D. A Methodological Approach to Compare Ontologies: Proposal and Application for SLAM Ontologies. In Proceedings of the 22nd International Conference on Information Integration and Web-Based Applications & Services, Chiang Mai, Thailand, 30 November–2 December 2020; pp. 223–233. [Google Scholar]
- Tanaka, H. Editdistance 0.3.1 PyPi. 2016. Available online: https://pypi.org/project/editdistance/0.3.1/ (accessed on 17 November 2021).
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Jian, N.; Hu, W.; Cheng, G.; Qu, Y. Falcon-AO: Aligning Ontologies with Falcon. In Proceedings of the Workshop on Integrating Ontologies, Banff, AB, Canada, 2 October 2005; pp. 87–93. [Google Scholar]
- Duque-Ramos, A.; Fernandez-Breis, J.; Stevens, R.; Aussenac-Gilles, N. OQuaRE: A SQuaRE-based approach for evaluating the quality of ontologies. J. Res. Pract. Inf. Technol. 2011, 43, 159–176. [Google Scholar]
- Krech, D. RDFlib: A Python Library for Working with RDF. 2006. Available online: https://github.com/RDFLib/rdflib (accessed on 17 November 2021).
- Grisettiyz, G.; Stachniss, C.; Burgard, W. Improving grid-based slam with rao-blackwellized particle filters by adaptive proposals and selective resampling. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; IEEE: Piscataway, NJ, USA, 2005; pp. 2432–2437. [Google Scholar]
- Hornung, A.; Wurm, K.M.; Bennewitz, M.; Stachniss, C.; Burgard, W. OctoMap: An efficient probabilistic 3D mapping framework based on octrees. Auton. Robot. 2013, 34, 189–206. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Ref. | Robot | Environment | Time | Workspace | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Information | Mapping | Information | Information | |||||||||||
| a | b | c | d | e | a | b | c | d | a | b | a | b | ||
| Robot Ontology, 2005 | [15] | ● | ● | ○ | ○ | ○ | ○ | ○ | ○ | ○ | ○ | ○ | ○ | ○ |
| Martinez et al., 2007 | [16] | ● | ○ | ● | ○ | ○ | ● | ● | ○ | ○ | ○ | ○ | ○ | ● |
| OMRKF, 2007 | [17] | ○ | ● | ○ | ○ | ○ | ● | ● | ○ | ○ | ● | ○ | ● | ● |
| SUMO, 2007 | [18] | ○ | ● | ○ | ○ | ○ | ○ | ○ | ○ | ○ | ○ | ○ | ○ | ○ |
| Space Ontology, 2010 | [8] | ○ | ○ | ○ | ○ | ○ | ● | ○ | ○ | ○ | ○ | ○ | ○ | ○ |
| OUR-K, 2011 | [19] | ● | ● | ● | ○ | ○ | ● | ● | ● | ○ | ● | ○ | ● | ○ |
| PROTEUS, 2011 | [20] | ● | ● | ● | ● | ● | ● | ● | ○ | ○ | ○ | ○ | ○ | ● |
| Uncertain Ontology, 2011 | [21] | ○ | ● | ○ | ○ | ○ | ● | ● | ● | ● | ○ | ○ | ● | ● |
| Wang and Chen, 2011 | [22] | ○ | ○ | ○ | ○ | ○ | ● | ● | ● | ○ | ○ | ○ | ● | ● |
| KnowRob, 2012 | [13] | ● | ● | ● | ○ | ● | ○ | ● | ○ | ○ | ○ | ○ | ● | ● |
| Hotz et al., 2012 | [23] | ○ | ○ | ● | ○ | ○ | ● | ● | ○ | ○ | ○ | ○ | ○ | ● |
| OASys, 2012 | [24] | ● | ● | ○ | ○ | ○ | ○ | ○ | ○ | ○ | ○ | ○ | ○ | ○ |
| Core Ontology, 2013 | [10] | ● | ○ | ○ | ○ | ○ | ● | ● | ○ | ○ | ○ | ○ | ○ | ○ |
| Li et al., 2013 | [25] | ○ | ○ | ● | ○ | ○ | ● | ● | ○ | ○ | ○ | ○ | ● | ● |
| POS, 2013 | [26] | ● | ○ | ● | ○ | ○ | ● | ● | ○ | ○ | ○ | ○ | ● | ○ |
| V. Fortes, 2013 | [12] | ● | ○ | ● | ● | ○ | ● | ● | ○ | ○ | ● | ● | ● | ○ |
| Wu et al., 2014 | [27] | ● | ● | ● | ○ | ● | ● | ● | ● | ● | ○ | ○ | ● | ○ |
| RoboEarth, 2015 | [28] | ● | ● | ● | ○ | ○ | ● | ● | ● | ● | ● | ○ | ● | ● |
| ROSPlan, 2015 | [9] | ○ | ● | ● | ○ | ○ | ● | ● | ○ | ○ | ○ | ○ | ○ | ○ |
| Burroughes and Gao, 2017 | [29] | ● | ● | ● | ● | ○ | ● | ● | ○ | ○ | ● | ● | ● | ○ |
| ADROn, 2018 | [30] | ● | ● | ○ | ○ | ○ | ○ | ○ | ○ | ○ | ○ | ○ | ○ | ○ |
| Deeken et al., 2018 | [31] | ○ | ● | ● | ○ | ○ | ● | ● | ○ | ○ | ○ | ○ | ● | ● |
| Sun et al., 2019 | [32] | ● | ● | ● | ● | ○ | ● | ● | ○ | ● | ○ | ○ | ● | ● |
| ISRO, 2020 | [11] | ● | ○ | ● | ● | ○ | ● | ● | ● | ○ | ● | ● | ○ | ● |
| Crespo et al., 2020 | [33] | ● | ● | ● | ○ | ○ | ● | ● | ● | ○ | ○ | ○ | ● | ● |
| Sung-Hyeon et al., 2020 | [34] | ● | ● | ● | ○ | ○ | ● | ● | ● | ○ | ○ | ● | ● | ● |
| BIRS, 2021 | [35] | ● | ● | ● | ○ | ○ | ● | ● | ● | ○ | ○ | ○ | ● | ● |
| Shchekotov et al., 2021 | [36] | ○ | ○ | ○ | ○ | ○ | ● | ● | ● | ○ | ● | ● | ○ | ● |
| OntoSLAM | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | |
| Pair | StringSim | DocSim | LS |
|---|---|---|---|
| FR2013/OntoSLAM | 0.43 | 0.65 | 0.54 |
| KnowRob/OntoSLAM | 0.16 | 0.57 | 0.36 |
| FR3013/KnowRob | 0.15 | 0.55 | 0.35 |
| Ontology | Classes | Relations | Properties | Annotations | ||
|---|---|---|---|---|---|---|
| is-a | has-* | other | ||||
| FR2013 | 46 | 41 | 0 | 16 | 2 | 0 |
| KnowRob | 252 | 182 | 117 | 76 | 62 | 3 |
| OntoSLAM | 69 | 86 | 34 | 13 | 14 | 33 |
| Pair | SimLingStruc |
|---|---|
| FR2013/OntoSLAM | 0.29 |
| OntoSLAM/KnowRob | 0.11 |
| FR2013/KnowRob | 0.08 |
| Ontologies | Robot Information | Environment Mapping | Timely Inform. | Workspace Inform. | Questions Answered | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| a1 | a2 | a3 | b1 | c1 | c2 | d1 | e1 | a1 | b1 | b2 | b3 | c1 | c2 | c3 | d1 | a1 | b1 | a1 | b1 | % | |
| FR2013 | √ | √ | √ | √ | √ | √ | √ | 35% | |||||||||||||
| KnowRob | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | 85% | |||
| OntoSLAM | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | 100% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cornejo-Lupa, M.A.; Cardinale, Y.; Ticona-Herrera, R.; Barrios-Aranibar, D.; Andrade, M.; Diaz-Amado, J. OntoSLAM: An Ontology for Representing Location and Simultaneous Mapping Information for Autonomous Robots. Robotics 2021, 10, 125. https://doi.org/10.3390/robotics10040125
Cornejo-Lupa MA, Cardinale Y, Ticona-Herrera R, Barrios-Aranibar D, Andrade M, Diaz-Amado J. OntoSLAM: An Ontology for Representing Location and Simultaneous Mapping Information for Autonomous Robots. Robotics. 2021; 10(4):125. https://doi.org/10.3390/robotics10040125
Chicago/Turabian StyleCornejo-Lupa, Maria A., Yudith Cardinale, Regina Ticona-Herrera, Dennis Barrios-Aranibar, Manoel Andrade, and Jose Diaz-Amado. 2021. "OntoSLAM: An Ontology for Representing Location and Simultaneous Mapping Information for Autonomous Robots" Robotics 10, no. 4: 125. https://doi.org/10.3390/robotics10040125
APA StyleCornejo-Lupa, M. A., Cardinale, Y., Ticona-Herrera, R., Barrios-Aranibar, D., Andrade, M., & Diaz-Amado, J. (2021). OntoSLAM: An Ontology for Representing Location and Simultaneous Mapping Information for Autonomous Robots. Robotics, 10(4), 125. https://doi.org/10.3390/robotics10040125