2. Phase–Amplitude Representations
In the following, we will limit the discussion to the description of continuum radial wavefunctions
, solutions of the radial Schrödinger equation:
where
and
. Most phase–amplitude (PA) representations may also be extended to bound states, considering an imaginary
k. Moreover, PA representations can also be used in the framework of the Dirac radial equation set without any difficulty (see, for instance, [
21], Section 2.3).
Phase–amplitude representation refers to a whole category, rather to a particular representation. Such representations consist of recasting the oscillatory wavefunction
R, regular at zero, as follows:
where
S is a given oscillatory function regular at zero.
is called the amplitude function, and
is the phase function.
Generalized PA representation may resort to any oscillatory function
S corresponding to the regular solution of the Schrödinger equation for some reference system. The generalized Wentzel–Kramers–Brillouin (WKB) approach [
22,
23,
24,
25] may be considered from this standpoint.
In the present article, we focus on Milne’s PA representation, which uses a sine function for
S.
The choice of a particular function S is not sufficient to completely determine the representation. In particular, the choice of the sine function for S is used in both Calogero’s and Milne’s PA representations.
Just to highlight their differences, let us briefly recall the basics of Calogero’s PA representation [
26]. To obtain this PA representation, one requires, in addition to Equation (
4), the following:
Therefore,
Since
is regular at zero, Calogero’s amplitude function is regular at zero. Re-writing Equation (
1) and using Equations (
4) and (
5) yields Calogero’s equations for phase and amplitude (see [
26], Equations (6.16) and (4.7)):
From these equations, it appears clearly that the amplitude and phase functions of Calogero’s PA representation exhibit rapid variations, i.e., on the scale of
r∼1/(2
k). This representation was used to derive many useful analytical results in scattering theory [
27], such as an analytic approximation to phase shifts in screened potentials [
28]. Calogero’s PA representation was also used in order to build efficient numerical methods for searching the eigenvalues of bound states in an attractive potential [
29,
30]. However, when applied to continuum orbitals, this representation requires the same typical sampling of
and
as the radial wavefunction itself.
Milne’s PA representation is most often derived by inserting Equation (
4) into Equation (
1), yielding
One then requires the factors in front of the sine and cosine of the phase to be zero independently. This leads to Milne’s equations for the phase and amplitude, respectively,
with
appearing as an arbitrary integration constant.
A somewhat more explicit definition of Milne’s phase and amplitude may be stated as follows. Let us consider
,
two linearly independent solutions of Equation (
1), with
being regular at
, and define
and
as follows:
One has
Differentiating Equation (16), one obtains
where
denotes the Wronskian. Differentiating Equation (
15) two times, one obtains
Using Equation (
1) for
and
, and the definition of Equation (
15), one obtains
Defining
, Equations (
18) and (
21) become Equations (
11) and (
12), respectively. This derivation has the advantage of showing explicitly how
is related to the normalizations of the
R and
Q functions.
Two particular cases are those of free particles (
) and particles in a Coulomb potential (
). For these, one has the following analytical solutions:
where
and
are the regular and irregular spherical Bessel functions, respectively, and
and
are the regular and irregular Coulomb wavefunctions. We use the conventions of [
31]. The latter analytical solutions can be used together with Equation (
15) for the evaluation of the boundary condition for fully screened and Coulomb-tail atomic potentials, respectively.
Equation (12) is a second-order nonlinear differential equation. Its solutions are nontrivial. However, in the asymptotic limit
, Equation (12) simply becomes
One readily see that a constant
can be solution of this equation, with its value being
This directly yields
using Equation (
11).
This asymptotic limit may also be recovered from the usual WKB approximation, which just consists of neglecting the second derivative
in Equation (12), yielding:
Let us stress that the parameter
is related through Equation (
25) to the asymptotic value of the amplitude function, which determines the normalization of
. Therefore,
has to be consistent with the boundary condition applied when solving Equation (12) for the amplitude. Having a parameter in the equation which has to be consistent with the boundary condition is typical for a nonlinear equation. On the contrary, linear equations allow the boundary condition to be set with an arbitrary multiplicative constant.
The solution of Equation (12) fulfilling the condition corresponds to a slowly varying amplitude function, asymptotically tending to the value . This is the amplitude function we are interested in, as it allows us to circumvent the Nyquist–Shannon sampling limit related to the oscillatory wavefunction .
However, Equation (12) may have other solutions than the slowly varying one. Returning to its asymptotic limit Equation (
24), let us try to find another solution by considering a first-order perturbation
around the constant solution of Equation (
25). The equation for the perturbation is
From this equation, we get
, showing that other solutions exist and that they exhibit rapid variation, i.e., over the
scale.
Equation (12) is thus a stiff differential equation in the sense that it has multiple solutions varying over very different scales. However, for the purpose of a sampling reduction, we are only interested in the slowly varying one. Moreover, being nonlinear, this equation can allow coupling among its various solutions, which may constitute a problem, as we will see in the next section.
For the sake of illustrating the slowly varying amplitude function of Milne’s PA representation, in
Figure 1, we present the radial wavefunctions
and the corresponding amplitude functions
, for
,
, in the case of a zero potential (a), of a screened Coulomb potential (b), and of a pure Coulomb potential (c). The slowly varying amplitude functions correspond to the envelopes of the related wavefunctions.
Of course, the amplitude function can be obtained from a numerical solution of Equation (
1), by finding the two linearly independent solutions
R and
Q and then combining them as in Equation (
15). However, such a method would require sampling oscillatory functions, thus defeating the purpose of using the PA representation.
Thus, a number of authors have studied numerical methods for solving Equation (12) directly. Seaton and Peach, as well as Trafton, proposed iterative schemes, starting from an initial guess of the amplitude [
15,
16]. Bar Shalom et al. [
13] proposed to use a predictor–corrector scheme due to Hamming (see [
32] Sec. 24.3) when it is stable, and they proposed a modified predictor–corrector scheme for the region in which Hamming’s method is unstable. Wilson et al. [
5,
14] proposed to use a Kaps–Rentrop method [
33,
34]. Rawitscher [
17] proposed a spectral iterative method based on a Chebyshev expansion.
In atomic physics applications, description of the continuum usually requires the calculation of a large number of wavefunctions in order to sample the momentum space. There is thus a special interest in fast, fully explicit numerical methods, such as that proposed in [
13]. Before coming to the method that we propose, let us first present our motivation for the present work by discussing the limitation of some existing methods.
3. Limitations of Some Existing Methods
Bar Shalom et al. [
13] propose an explicit method to numerically solve Equation (12) on a fixed grid of exponentially spaced points. The method in fact resorts to three distinct numerical schemes. We briefly recall its general principle below, as it guided many aspects of our method’s development.
In the innermost region, a standard Numerov scheme is used to solve Equation (
1) for
, up to a matching point
, chosen close to the turning point
, such that
.
Beyond the matching point, Bar Shalom et al. [
13] use a predictor–corrector method due to Hamming (see [
32] Sec. 24.3) in order to solve Equation (12) for
. Let us call this scheme Hamming’s predictor–corrector (HPC). However, they find that, as soon as
is greater than one, then the corrector step amplifies the prediction error. Far from the origin, the slowly varying amplitude solution tends to a constant. Thus,
takes small values which are obtained through Equation (12) as differences between two values that are comparatively large. This leads to large numerical errors, and this issue is common to all approaches that make use of Equation (12) to obtain
from
.
As a solution to this problem, Bar Shalom et al. [
13] propose a modified predictor–corrector scheme for the outermost region. Its basic principle is to use the fact that
varies slowly to build a predictor for
and then use Equation (12) as a corrector, deducing a new value of
from
. This is carried out performing one step of a Newton method. Using the amplitude equation in this other way, the error amplification factor is inverted, leading to a stable scheme. Let us call this scheme Bar Shalom’s modified predictor–corrector (BSMPC).
In addition to the BSMPC scheme, the authors suggest to further improve the solution in the outermost region by re-evaluating from a high-order finite-difference scheme (five-point scheme) and correcting again using Equation (12). Adding such a step makes the method become partly an iterative method, and we did not find such an improvement useful in the present study.
The switching radius
from the HPC to BSMPC scheme is located where
, and these two schemes are actually employed in order to propagate the solution inwards, starting from the outer boundary condition at
. Finally, solutions for
and
are matched at the radius
, allowing one to normalize
and determine the phase at the matching point. A summary of this method is given in
Table 1.
We found that the numerical method proposed in [
13] performs very well on coarse grids. As described in their article, one really needs to apply both HPC and BSMPC schemes, paying attention to the switching radius
. We verified that error amplification actually occurs when using any of the numerical schemes on the wrong side of
, and found that the overall method is very sensitive to such error amplification.
In his book, Hamming derives a predictor–corrector numerical scheme of order 6. He also describes corrections to the predictor and corrector (see [
32], end of Sec. 24.3), which are presented as optional, and makes the scheme of order 8. We found that in the present case, these corrections are required for the global stability of the numerical method, and we assume that Bar Shalom and his coauthors did use these corrections.
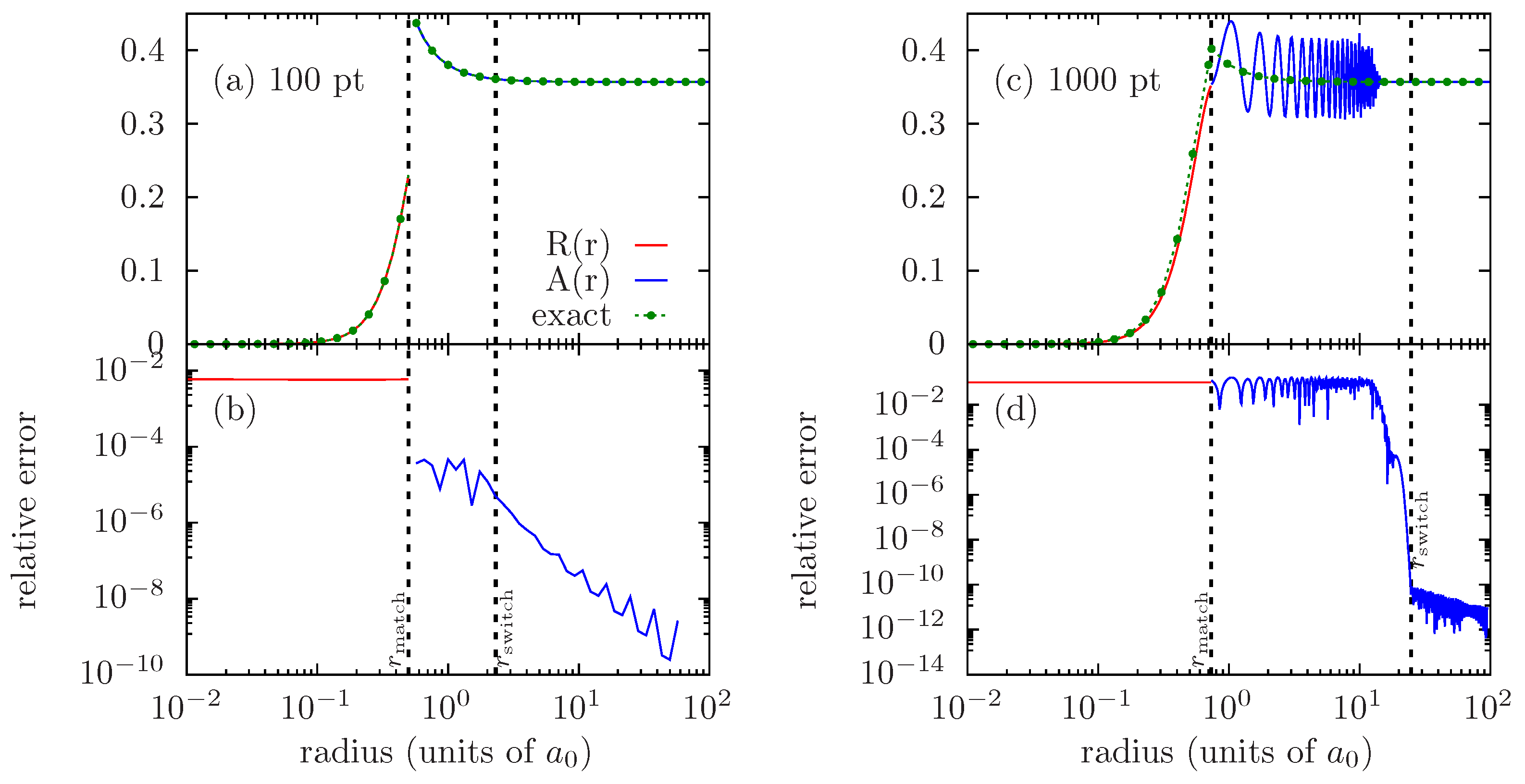
In principle, if one wants to increase the precision of the solution, refining the grid should be the way to proceed. It turns out that beyond a certain level of refinement, a numerical instability occurs, ruining the numerical solution. This issue is illustrated in
Figure 2, which displays the results obtained in a case of zero potential (amplitude of spherical Bessel functions) when increasing the number of grid points from 100 to 1000.
The triggering of an instability when considering finer grids constitutes a serious limitation to the systematic use of this numerical scheme, as it impairs the control of the numerical precision.
In
Figure 2d, one may clearly identify a region of strong increase in errors. This region seems to always lie in the intermediate region, where the HPC scheme is used. By applying the predictor–corrector scheme step by step on a test case for which the solution is known exactly, one may precisely analyze the source of errors. By restarting at each step from the “exact” amplitude, one can see that the error growth is driven by the predictor; on the other hand, the corrector systematically improves the solution as expected.
An explanation for this large increase in error may be the nonlinear character of Equation (12). In principle, it allows for the coupling among various solutions and enables the growth of a spurious, rapidly varying component in the solution, starting from an initial seed.
In principle, we select the desired, slowly varying solution through the boundary condition. However, any error, either the truncation error on the boundary condition or the accumulation of numerical errors when propagating the solution, may be seen as a mix between the desired solution and the spurious ones, seeding the growth of the rapidly varying component.
A numerical limitation to the growth of a rapidly varying component is the sampling. A coarse grid acts as a low-pass filter and may temper the growth of a rapidly varying component. It turns out that the criterion for switching from the HPC to BSMPC is close to the Nyquist–Shannon sampling criterion for the rapidly varying solution. This probably explains why the region where the spurious component builds up is located inside the intermediate region, near the switching radius.
Regardless of the method used, any attempt to directly solve the nonlinear Equation (12) is likely to yield a result which is strongly sensitive to errors and prone to the growth of a rapidly varying component in the amplitude. This notably explains the crucial need for a high-order scheme in the method of [
13] and why the corrections which allow one to reach order 8 matter so much.
In [
5,
14], the authors used a Rosenbrock method proposed by Kaps and Rentrop [
33], which is frequently used for stiff equations [
34]. Typical numerical methods for stiff equations are usually based on adaptive grid refinement, aiming at correctly sampling all solutions, with all their various scales of variation.
Certainly, Equation (12) is stiff, but our purpose is only to calculate its slowly varying solution, and not to achieve a correct sampling of all of its solutions. In this view, it is likely that such methods are of limited help for the present problem. However, using a very stringent precision target, adaptive grid refinement may also limit the accumulation of errors, therefore limiting the seed for a spurious component. One should, however, keep in mind that, in many cases of application, the potential associated with the wavefunctions is sampled on a predefined grid. Adaptive refinement methods then require to interpolate the potential at intermediate grid points, resulting in a supplementary loss of precision.
A simple, explicit method resorting to adaptive grid refinement is the Runge–Kutta–Merson (RKM) method [
35]. We choose this method as a test-bed in order to illustrate a typical issue of using an adaptive grid refinement method for Equation (12).
The RKM method is based on a fourth-order Runge–Kutta (RK4) scheme, with a supplementary evaluation that allows one to estimate the truncation error. Let us first put Equation (12) under the canonical form:
with
being
and the bars denoting vector functions having two components labeled 0 and 1, respectively.
Solving for
over one step
h with a classical RK4 scheme requires the evaluation of the function
at four different points:
One then expresses the fourth-order approximate solution
as a weighted sum of the
’s.
Then, using only one more evaluation of the function
,
one may calculate a fifth-order approximation
:
The truncation error
can then be estimated, allowing one to choose the integration step according to a fixed precision target, or tolerance
. The algorithm that we use is as follows. If
, divide the integration step
h by 2. If
, multiply it by 2. If
, accept the step and proceed to the next grid point
.
As for the method of Bar Shalom et al. [
13], we employ the RKM scheme to propagate the solution inwards, starting from the outer boundary condition at
. We apply the RKM method successively for each interval between two points of the base grid.
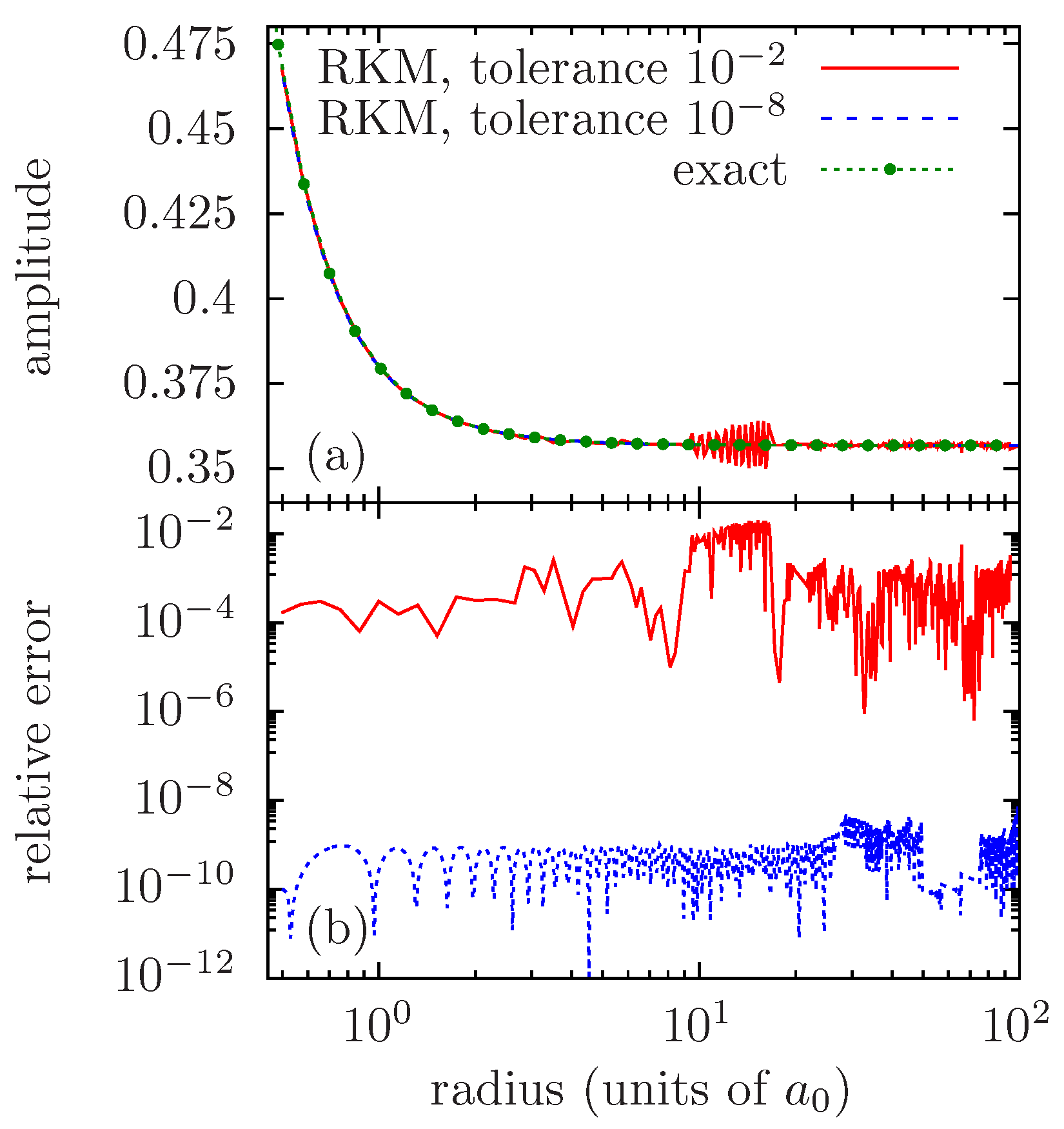
Figure 3 presents the results obtained with the RKM method on the same case as in
Figure 2, with the base grid being that of
Figure 2a,b (100 points, out of which 38 for the
interval).
Setting the tolerance to , one can see how the spurious solution can grow, requiring the method to refine the grid in order to correctly sample its rapid variations. In the present case, the refined grid actually has 436 points, which should be compared with the 38 points between and of the initial grid.
By decreasing the tolerance of the integration steps to , one may efficiently prevent the growth of numerical errors; however, this is carried out at the price of refining the grid even more. In the present case, the refined grid for tolerance has 848 grid points.
The Kaps–Rentrop (KR) method [
33,
34] was used by Wilson et al. [
5,
14] to solve the amplitude equation related to the Dirac equation, which is an analogue of Equation (12). It is an adaptive mesh refinement method based on an implicit scheme.
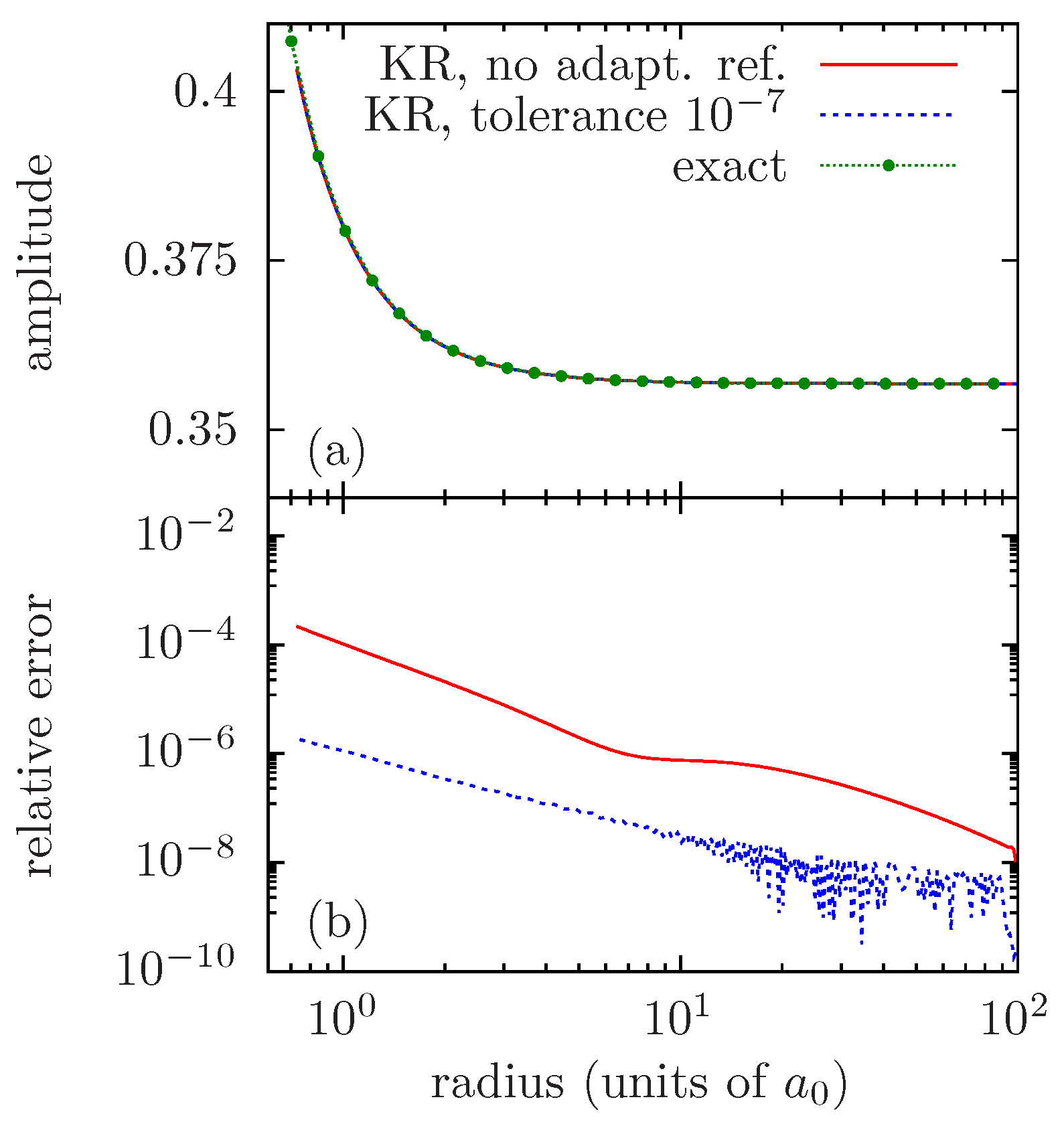
Figure 4 presents the results obtained with the KR method on the same case as in
Figure 2, with the base grid being that of
Figure 2c,d (1000 points, out of which 272 are for the
interval). We tried using the KR numerical scheme both with and without performing an adaptive grid refinement.
It may be seen in
Figure 4a that the implicit scheme of the KR method seems stable over the whole region between
and
. By directly using the base grid, i.e., performing no adaptive refinement, the KR numerical scheme yields a result of limited precision, with the maximum relative error being about
in this case. In order to improve precision, grid refinement has to be performed. Achieving a maximum relative error of about
requires setting the precision target to
, which results in a refined grid of
points, which should be compared with the 272 points of the base grid.
The mechanism may be interpreted as follows. When propagating the numerical solution, errors accumulate, deviating the obtained solution from the slowly varying amplitude. The errors may be seen as a linear perturbation as that of Equation (
29). As soon as the magnitude of these errors reaches the precision target of the method, the grid has to be refined in order to correctly describe the behavior of the perturbation, which actually has rapid variations.
A closely related issue is the sensitivity to errors on the boundary condition. Any inconsistency between the boundary condition and the value of
can be viewed as a contribution from a rapidly varying component, which results in heavy grid refinement (see, for instance, [
21], Figure 6.9, p. 115).
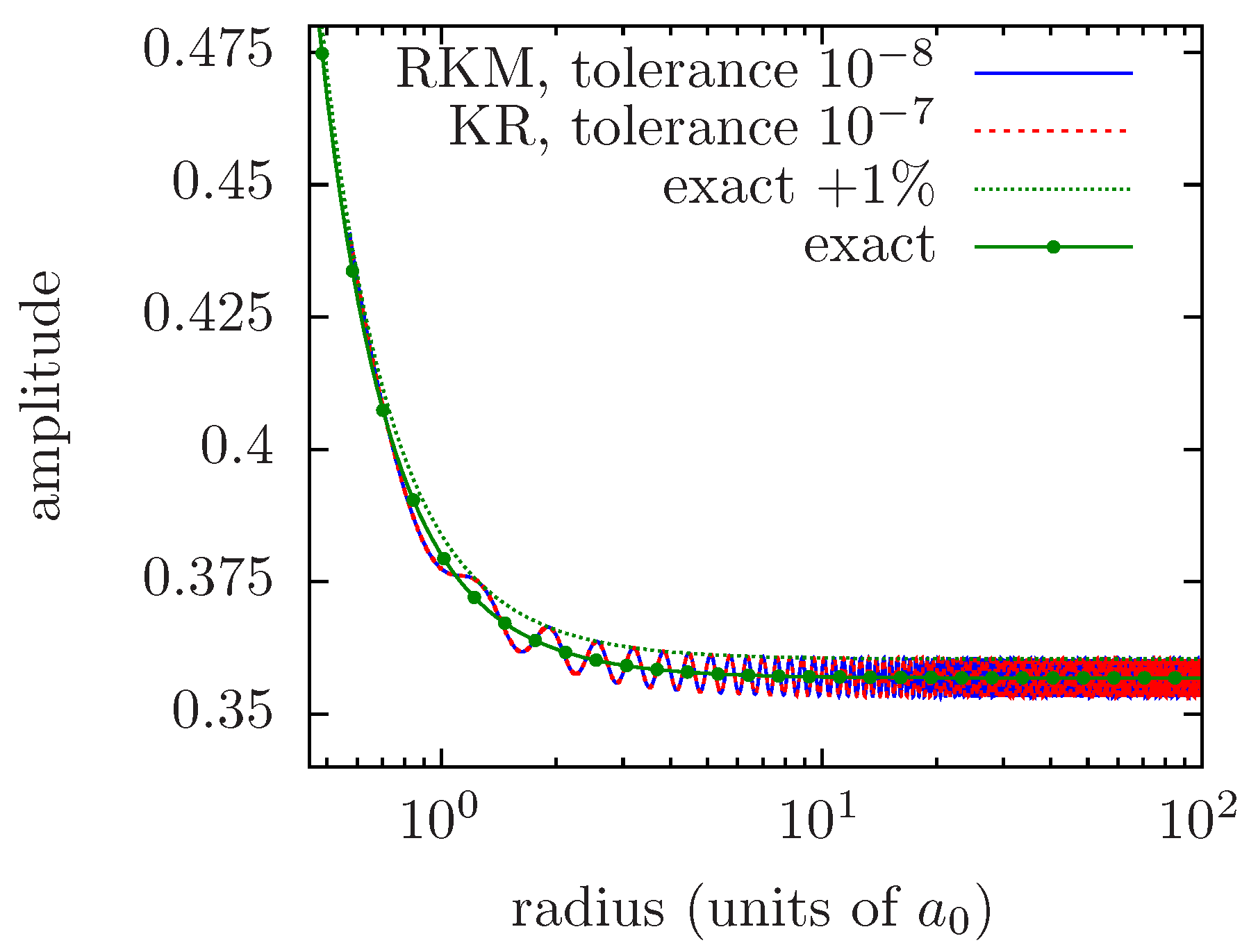
In order to illustrate the latter points,
Figure 5 shows the results of the RKM and KR methods when a perturbation larger than the precision target is artificially introduced in the boundary condition. One clearly sees how these methods result in refining the grid so as to correctly sample the rapid variations of the perturbation. The same phenomenon occurs, with the much smaller perturbation induced by accumulated numerical errors, as soon as they reach the precision target.
5. Test of the Method
We tested the present method using linear grids, quadratic grids, exponentially spaced grids, and mixed linear–exponential grids. The relations between the radius
in these grids and the parameter
r which is uniformly sampled are recalled in
Table 3. Together with the change of variable from
to
r, we perform the following change of function
, which leaves Equations (
1), (12) and (
38) invariant:
The relevant functions
for each grid are also given in
Table 3.
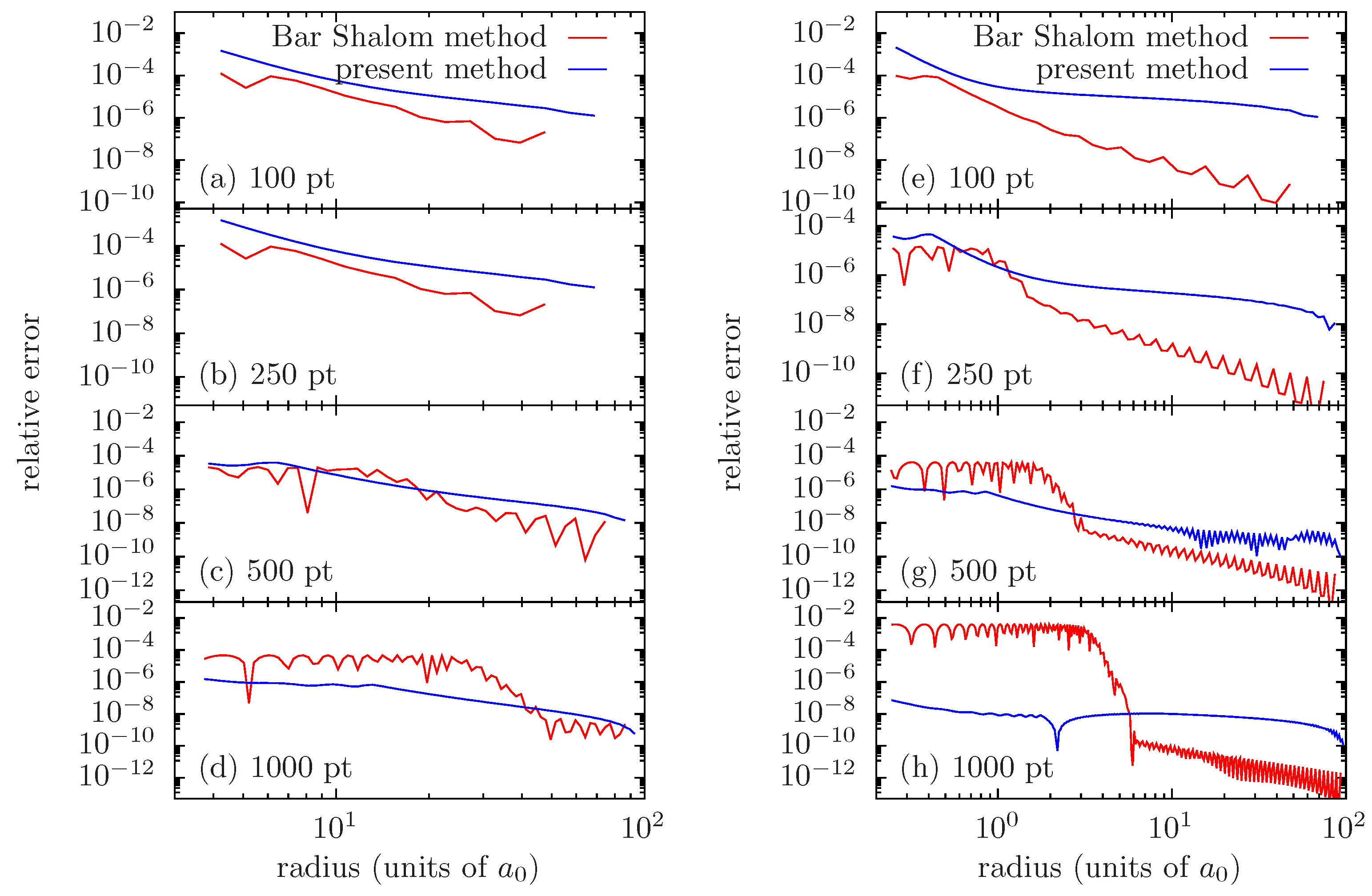
Figure 6 presents the relative error on the amplitude function obtained with our method, compared to that of [
13], in the case of zero potential, for
,
and
. In order to remain as close as possible to reference [
13], we perform this comparison using an exponentially spaced grid, varying the number of grid points. We also set the matching point to be located not farther than the first maximum of
.
Errors in the outermost region seem systematically larger with the present method than with the method of [
13]. This may indicate that the approximation of Equation (
52) is less justified for
than it is for
. However, the largest contribution to the numerical errors stems from error accumulation in the intermediate region, where the amplitude varies more significantly. Consequently, we do not consider the numerical scheme used in the outermost region as a limiting factor for our method.
Using a coarse grid (see
Figure 6a,e), for which the method of [
13] performs well, error growth in the intermediate region is stronger with our fifth-order scheme than with the HPC scheme, which is of the eighth order. This is fully expected.
Considering finer grids (see
Figure 6b–d,f–h), one clearly sees the effect of the spurious component that appears with the method of [
13], which puts a lower bound on the precision that may be achieved and ultimately ruins the solution. On the contrary, the present method exhibits a continuous improvement of precision, when one refines the grid. Beyond some grid refinement, it may become relevant to improve the solution in the outermost region. This can be carried out as suggested in [
13], by making some iterative steps after applying the modified predictor–corrector scheme.
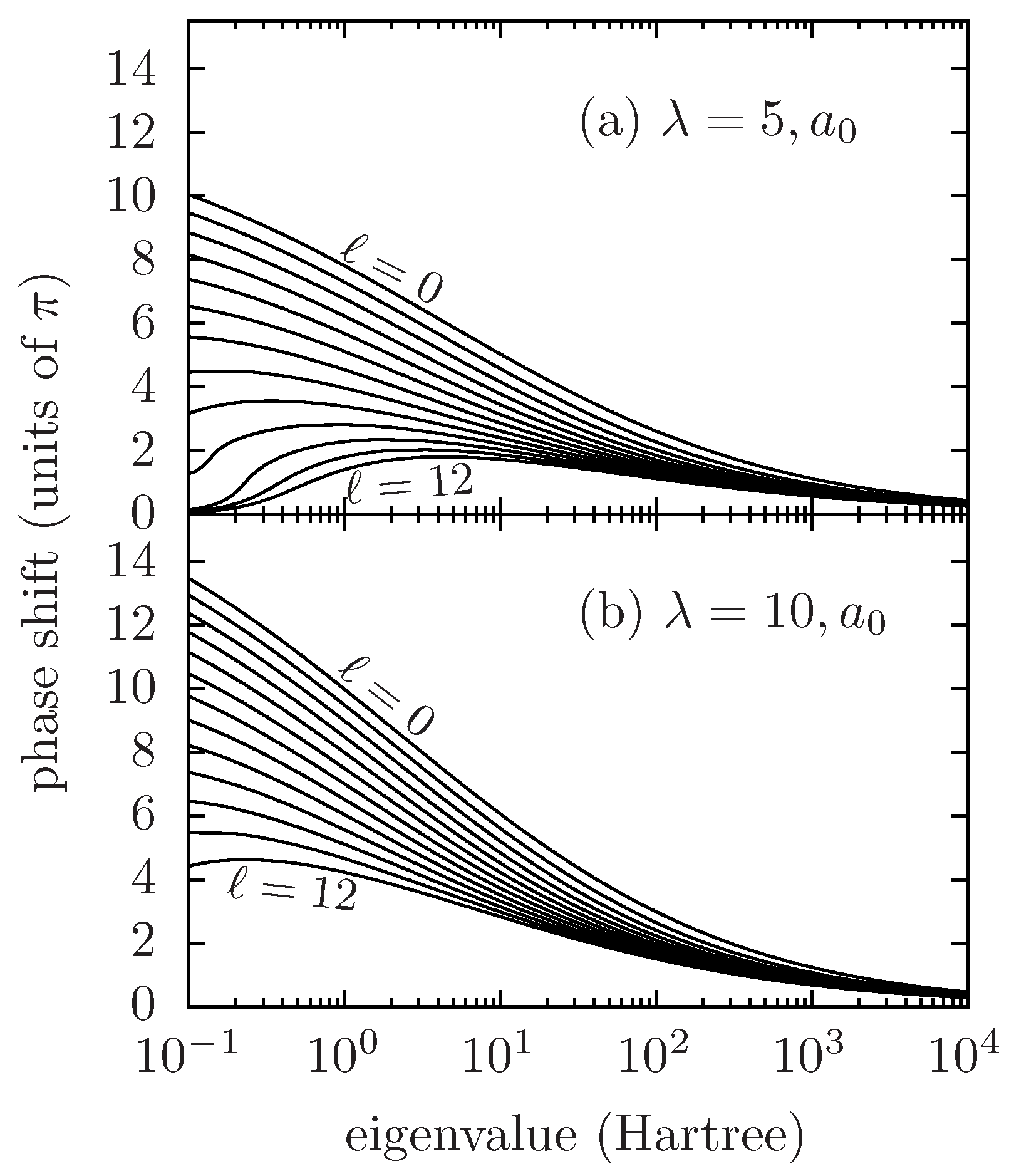
As an example of the systematic application of the present numerical method, we present, in
Figure 7, the phase shifts as functions of eigenvalue (i.e., orbital energy) for two fully screened Coulomb potentials with
, decay length
and
, for an orbital number
ℓ ranging from 0 to 12. These curves were obtained using the present method on an exponentially spaced grid of 1000 points, spanning from
to
. Using the Milne PA representation with the present numerical method allows one to compute phase shifts for arbitrarily high eigenvalues while keeping this relatively coarse radial grid. Recovering comparable results from a computation of the oscillatory wavefunction
on the same range of radii and energies typically requires a radial grid with a few hundred thousand points.
The computation of wavefunctions for a partially screened potential, i.e., a potential having a Coulomb tail
, can be carried out according to the same method, using the Coulomb wavefunctions in the boundary condition instead of Bessel functions (see Equations (
22), (23) and (
15)). One would then be interested in finding the phase shifts with respect to the Coulomb wavefunctions related to the asymptotic charge
.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}