
EAS Observation Conditions in the SPHERE-2 Balloon Experiment

 , , , , , , and
, , , , , , and
Abstract
:1. Introduction
2. The SPHERE-2 Detector Telemetry Systems
2.1. Control Block Telemetry
2.2. Orientation Control System
2.3. Telemetry Monitoring
3. Experimental Conditions
3.1. Weather and Snow
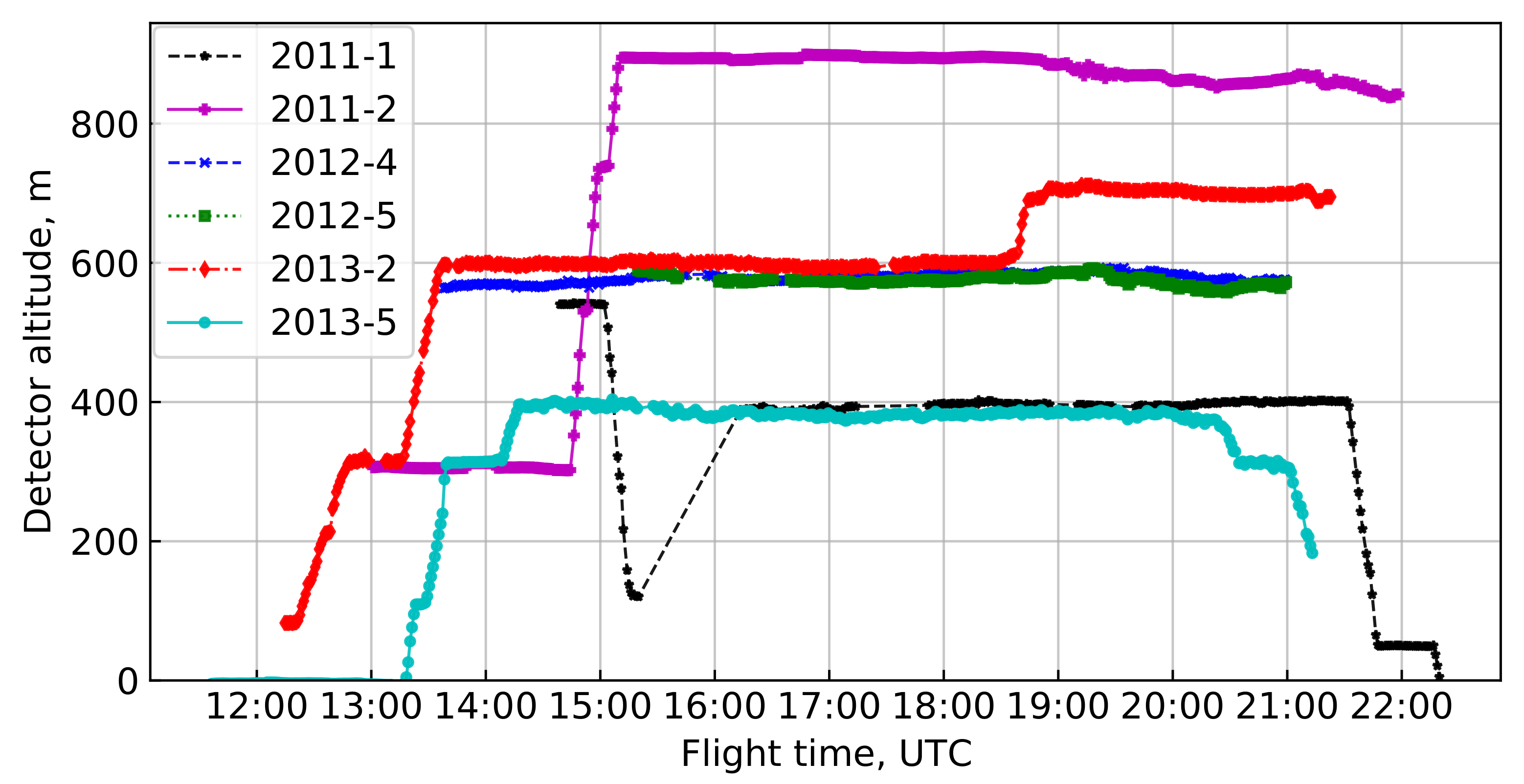
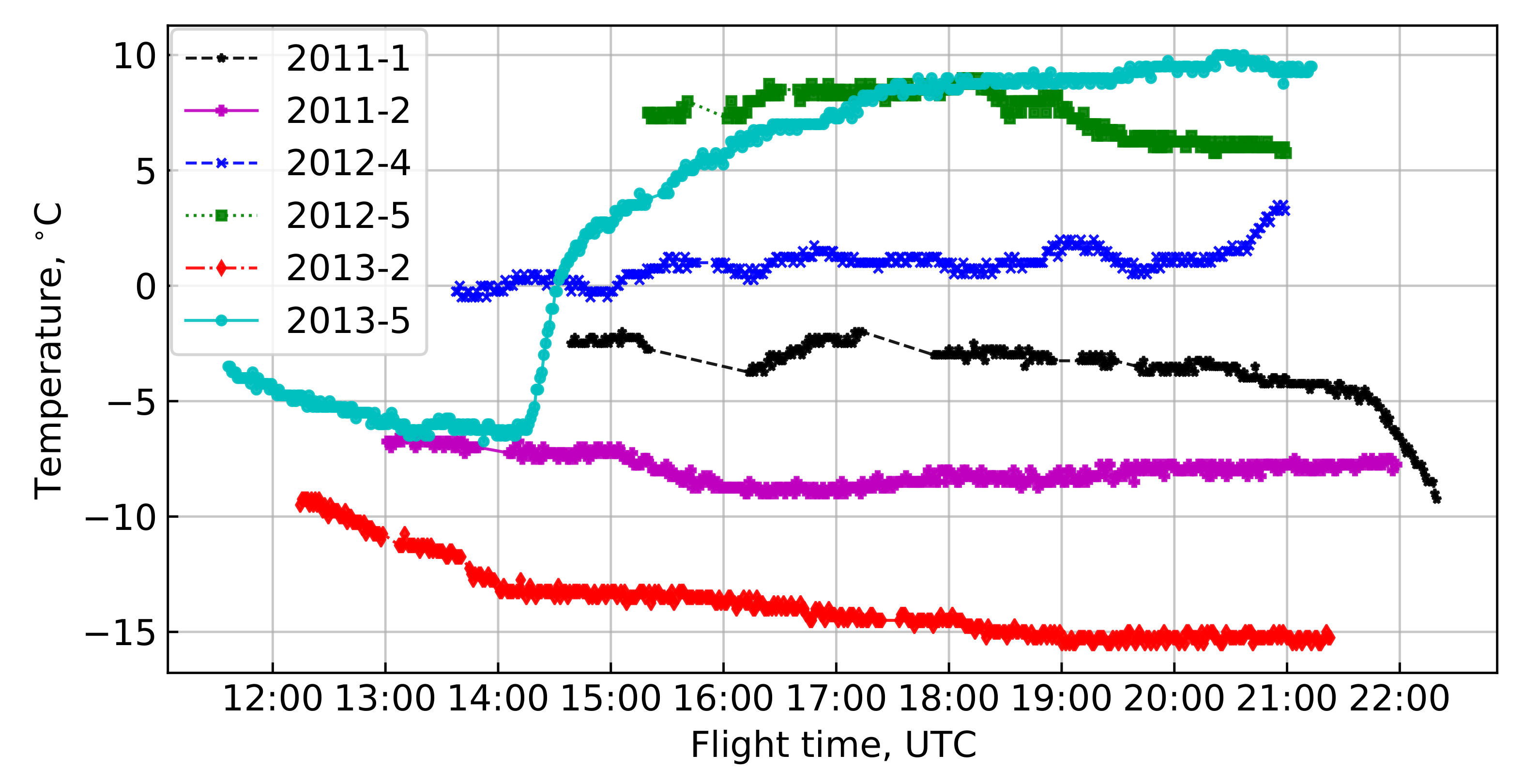
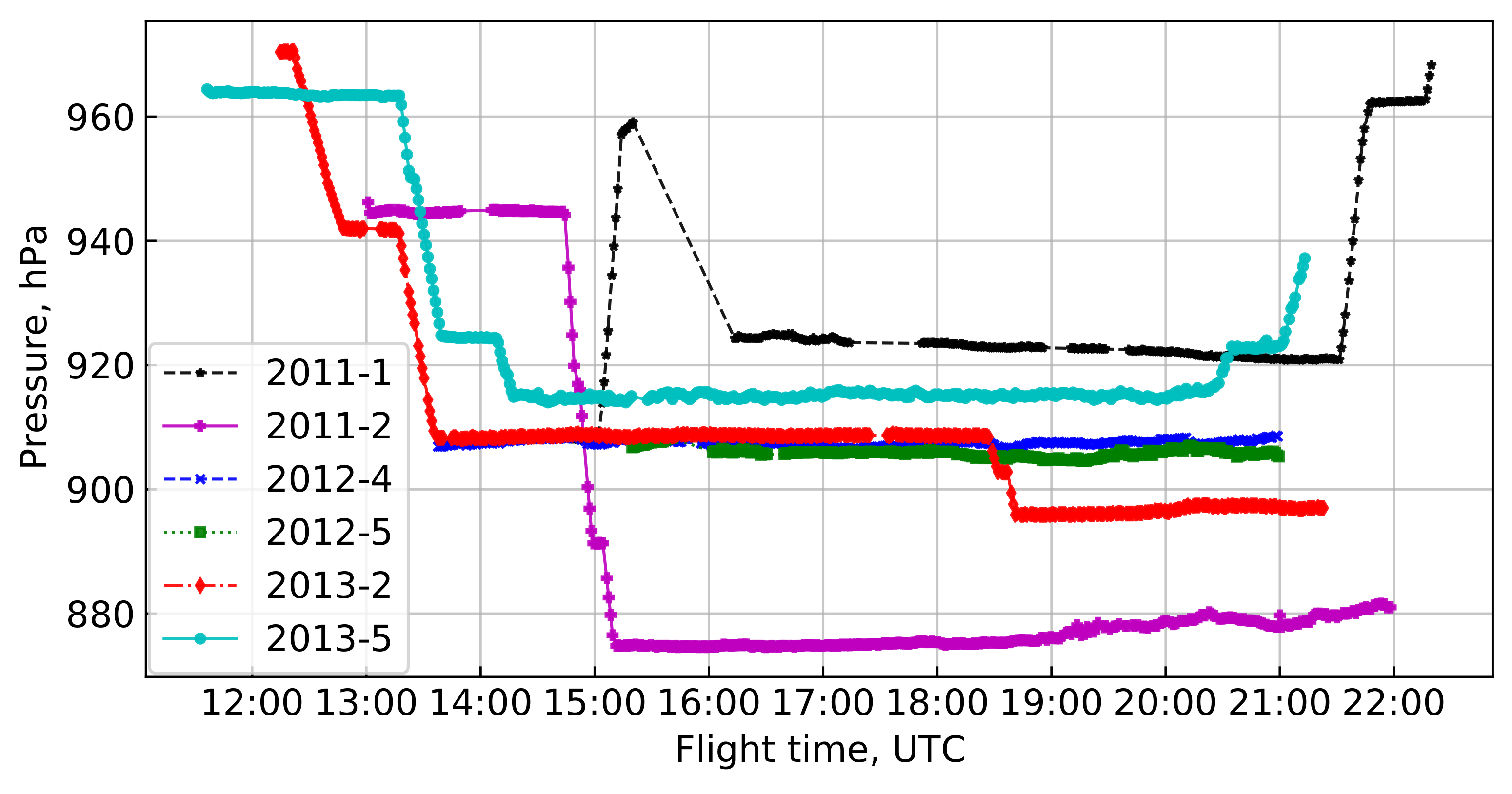
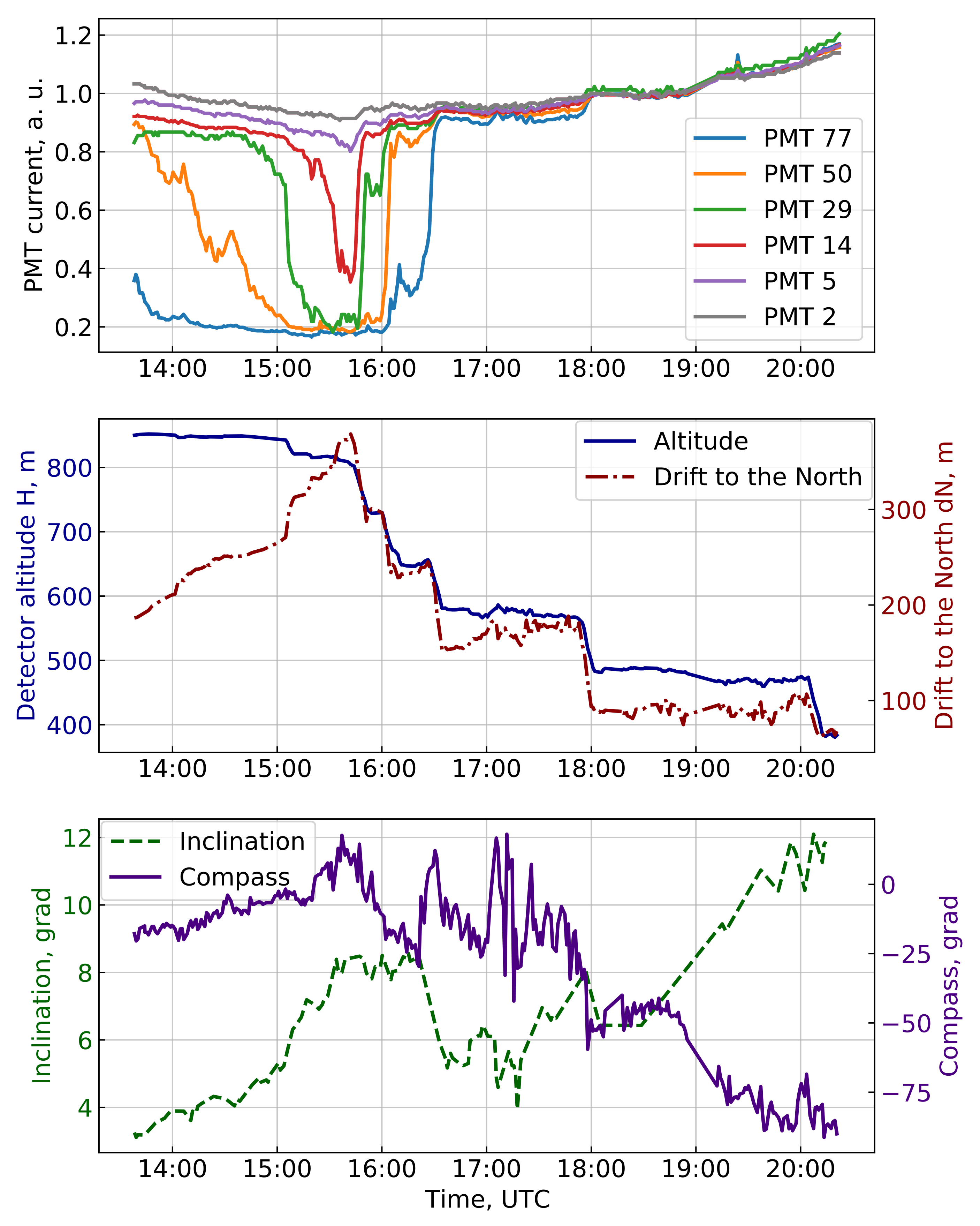
3.2. Detector Orientation and Telemetry Data
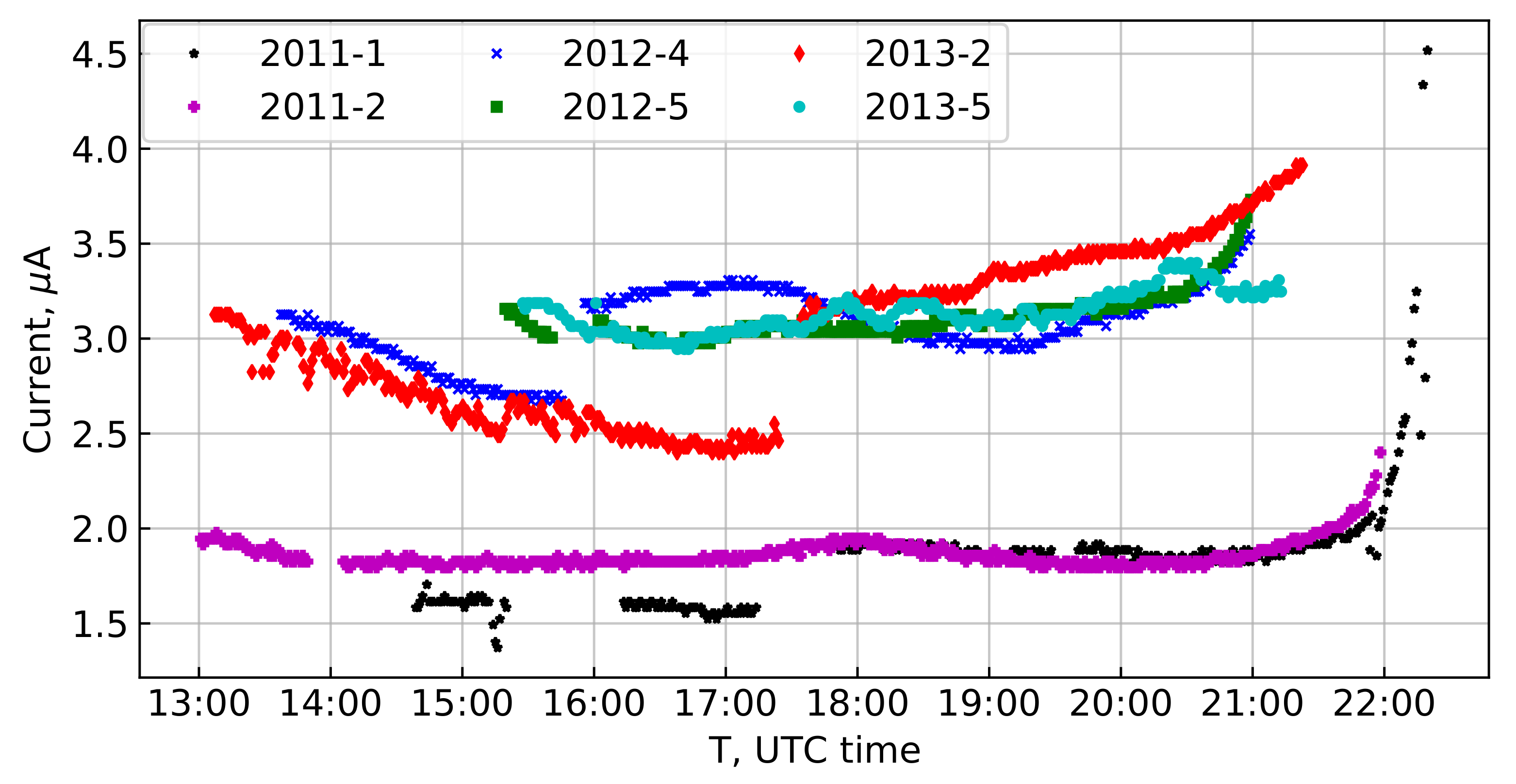
3.3. PMT Currents’ Variations
4. Telemetry Analysis
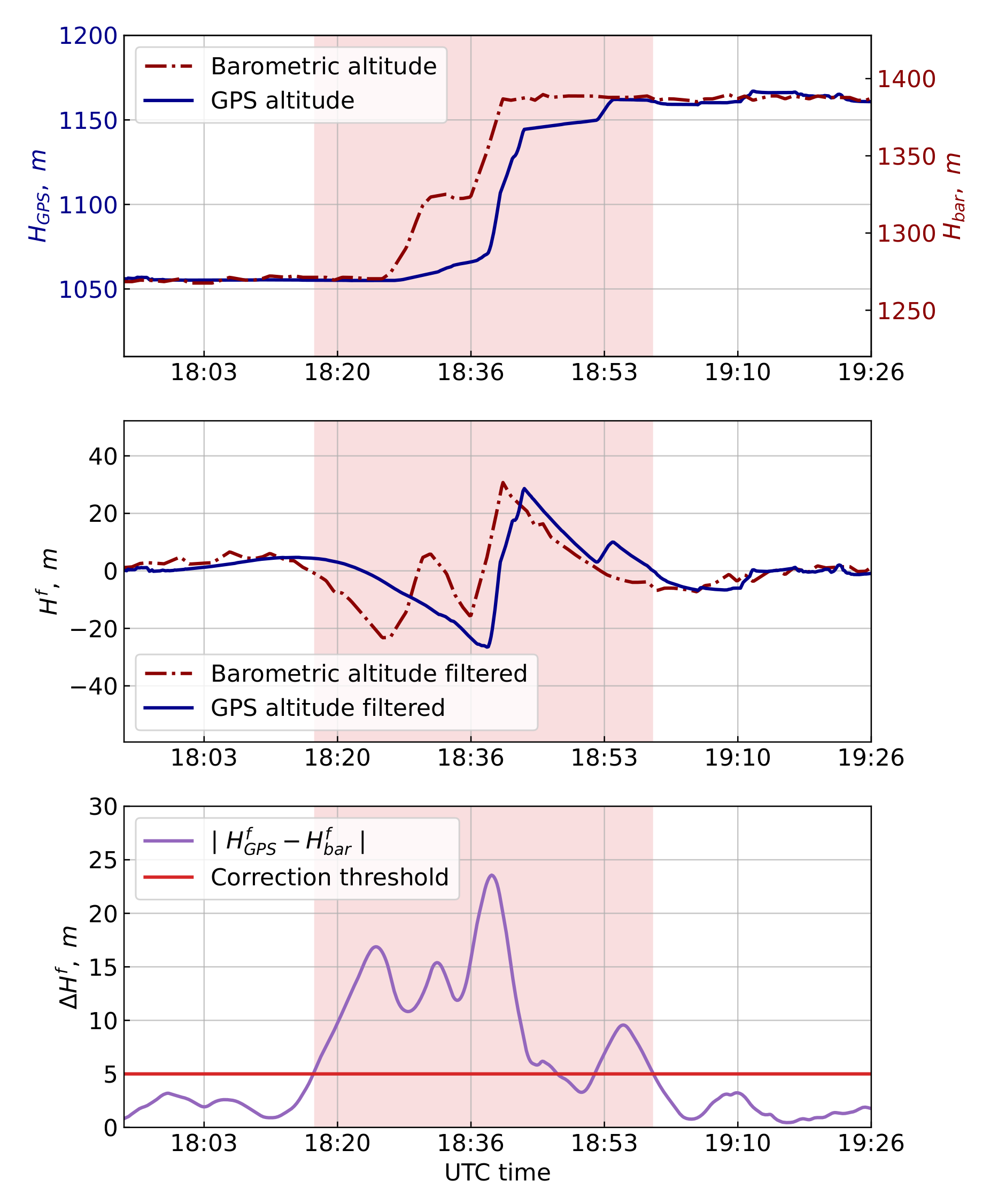
4.1. GPS Altitude Correction with Barometer Data
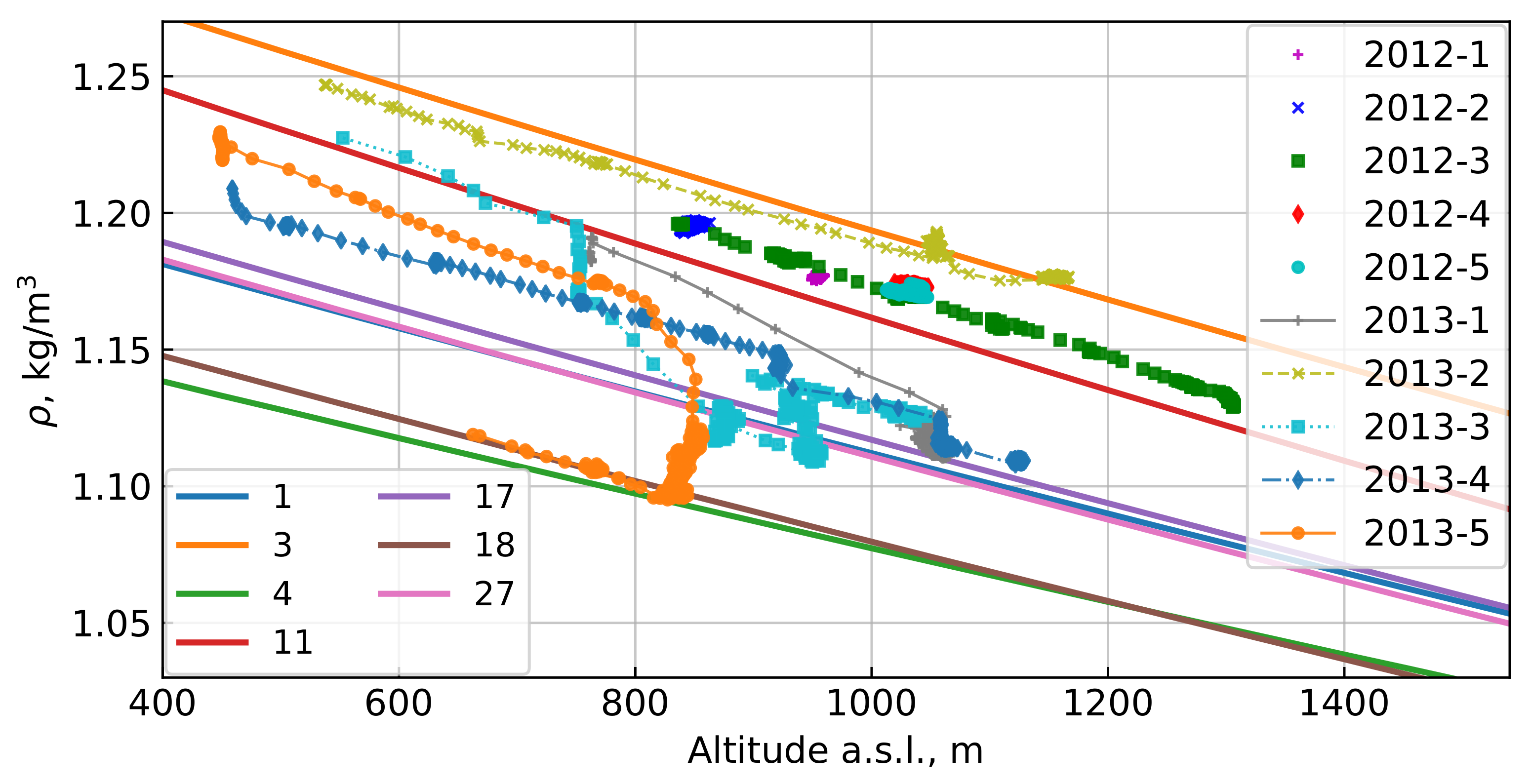
4.2. Atmosphere Density Profile
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chudakov, A. A possible method to detect EAS by the Cherenkov radiation reflected from the snowy ground surface. In Proceedings of the All-Union Symposium of Experimental Methods of Studying Cosmic Rays of Superhigh Energies, Yakutsk, 1972; Yakutsk Division, Siberian Branch, USSR Academy of Science: Yakutsk, Russia, 1974; Volume 620, pp. 69–72. (In Russian) [Google Scholar]
- Antonov, R.; Ivanenko, I.P.; Rubtsov, V.I. Installation for Measuring the Primary Energy Spectrum of Cosmic Rays in the Energy Range Above 1015–1016 eV. In Proceedings of the 14st International Cosmic Ray Conference, Max-Planck-Institut Fur Extraterrestrische Physik, München, Germany, 15–29 August 1975; Volume 9, p. 3360. [Google Scholar]
- Antonov, R.A.; Ivanenko, I.P.; Kuzmin, V.A. Simulating an apparatus for examining the primary cosmic-ray spectrum at 1015–1020 eV. Bull. Acad. Sci. USSR Phys. Ser. 1986, 50, 136–138. [Google Scholar]
- Antonov, R.; Chernov, D.V.; Fedorov, A.N.; Korosteleva, E.E.; Petrova, E.A.; Sysojeva, T.I.; Tkaczyk, W. Primary Cosmic Ray Spectrum Measured using Cherenkov Light Reflected from the Snow Surface. In Proceedings of the 25th International Cosmic Ray Conference, Durban, South Africa, 30 July–6 August 1997; Volume 4, p. 149. [Google Scholar]
- Antonov, R.; Aulova, T.; Bonvech, E.; Galkin, V.; Dzhatdoev, T.A.; Podgrudkov, D.A.; Roganova, T.M.; Chernov, D.V. Detection of reflected Cherenkov light from extensive air showers in the SPHERE experiment as a method of studying superhigh energy cosmic rays. Phys. Part. Nucl. 2015, 46, 60–93. [Google Scholar] [CrossRef]
- Aab, A.; Abreu, P.; Aglietta, M.; The Pierre Auger Collaboration. The Pierre Auger Cosmic Ray Observatory. Nucl. Instrum. Methods Phys. Res. Sect. A Accel. Spectrometers Detect. Assoc. Equip. 2015, 798, 172–213. [Google Scholar] [CrossRef]
- Abreu, P.; Aglietta, M.; Albury, J.; Allekotte, I.; Almela, A.; Alvarez-Muñiz, J.; Alves Batista, R.; Anastasi, G.A.; Anchordoqui, L.; Andrada, B.; et al. The energy spectrum of cosmic rays beyond the turn-down around 1017 eV as measured with the surface detector of the Pierre Auger Observatory. Eur. Phys. J. C 2021, 81, 1–25. [Google Scholar] [CrossRef]
- Abu-Zayyad, T.; Aida, R.; Allen, M.; Anderson, R.; Azuma, R.; Barcikowski, E.; Belz, J.W.; Bergman, D.R.; Blake, S.A.; The Telescope Array Collaboration; et al. The surface detector array of the Telescope Array experiment. Nucl. Instrum. Methods Phys. Res. Sect. A Accel. Spectrometers Detect. Assoc. Equip. 2012, 689, 87–97. [Google Scholar] [CrossRef]
- Glushkov, A.V.; Pravdin, M.I.; Saburov, A.V. Energy Spectrum of Ultrahigh-Energy Cosmic Rays according to Data from the Ground-Based Scintillation Detectors of the Yakutsk EAS Array. JETP 2019, 128, 415–422. [Google Scholar] [CrossRef]
- Budnev, N.; Astapov, I.; Bezyazeekov, P.; Bonvech, E.; Boreyko, V.; Borodin, A.; Brückner, M.; Bulan, A.; Chernov, D.; Chernykh, D.; et al. TAIGA—An advanced hybrid detector complex for astroparticle physics and high energy gamma-ray astronomy in the Tunka valley. JINST 2020, 15, C09031. [Google Scholar] [CrossRef]
- Bernlöhr, K.; Carrol, O.; Cornils, R.; Elfahem, S.; Espigat, P.; Gillessen, S.; Heinzelmann, G.; Hermann, G.; Hofmann, W.; Horns, D.; et al. The optical system of the H.E.S.S. imaging atmospheric Cherenkov telescopes. Part I: Layout and components of the system. Astropart. Phys. 2003, 20, 111–128. [Google Scholar] [CrossRef]
- Aharonian, F.; Akhperjanian, A.G.; Bazer-Bachi, A.R.; Beilicke, M.; Benbow, W.; Berge, D.; Bernlöhr, K.; Boisson, C.; Bolz, O.; Borrel, V.; et al. Observations of the Crab nebula with HESS. Astron. Astrophys. 2006, 457, 899–915. [Google Scholar] [CrossRef]
- Aleksić, J.; Ansoldi, S.; Antonelli, L.; Antoranz, P.; Babic, A.; Bangale, P.; Barcelo, M.; Barrio, J.A.; González, J.B.; Bednarek, W.; et al. The major upgrade of the MAGIC telescopes, Part I: The hardware improvements and the commissioning of the system. Astropart. Phys. 2016, 72, 61–75. [Google Scholar] [CrossRef] [Green Version]
- Aleksić, J.; Ansoldi, S.; Antonelli, L.; Antoranz, P.; Babic, A.; Bangale, P.; Barceló, M.; Barrio, J.A.; Becerra González, J.; Bednarek, W.; et al. The major upgrade of the MAGIC telescopes, Part II: A performance study using observations of the Crab Nebula. Astropart. Phys. 2016, 72, 76–94. [Google Scholar] [CrossRef] [Green Version]
- Weekes, T.; Badran, H.; Biller, S.; Bond, I.; Bradbury, S.; Buckley, J.; Carter-Lewis, D.; Catanese, M.; Criswell, S.; Cui, W.; et al. VERITAS: The Very Energetic Radiation Imaging Telescope Array System. Astropart. Phys. 2002, 17, 221–243. [Google Scholar] [CrossRef]
- Ong, R.A.; Acciari, V.A.; Arlen, T.; Aune, T.; Beilicke, M.; Benbow, W.; Boltuch, D.; Bradbury, S.M.; Buckley, J.H.; Bugaev, V.; et al. Highlight Talk: Recent Results from VERITAS. In Proceedings of the 31st International Cosmic Ray Conference, Lodz, Poland, 7–15 July 2009; Available online: https://arxiv.org/abs/0912.5355 (accessed on 23 December 2021).
- Klimov, P.; Panasyuk, M.; Khrenov, B.; Garipov, G.K.; Kalmykov, N.N.; Petrov, V.L.; Sharakin, S.A.; Shirokov, A.V.; Yashin, I.V.; Zotov, M.Y.; et al. The TUS Detector of Extreme Energy Cosmic Rays on Board the Lomonosov Satellite. Space Sci. Rev. 2017, 212, 1687–1703. [Google Scholar] [CrossRef]
- Khrenov, B.; Garipov, G.; Kaznacheeva, M.; Klimov, P.; Panasyuk, M.; Petrov, V.L.; Sharakin, S.A.; Shirokov, A.V.; Yashin, I.V.; Zotov, M.Y.; et al. An extensive-air-shower-like event registered with the TUS orbital detector. J. Cosmol. Astropart. Phys. 2020, 2020, 33. [Google Scholar] [CrossRef] [Green Version]
- The JEM-EUSO Collaboration; Adams, J.; Ahmad, S.; Albert, J.N.; Allard, D.; Anchordoqui, L.; Andreev, V.; Anzalone, A.N.N.A.; Arai, Y.; Asano, K.; et al. The JEM-EUSO instrument. Exp. Astron. 2015, 40, 19–44. [Google Scholar] [CrossRef] [Green Version]
- Bertaina, M.E.; JEM-EUSO Collaboration. An overview of the JEM-EUSO program and results. In Proceedings of the 37th International Cosmic Ray Conference, Online, Berlin, Germany, 12–23 July 2021; Volume ICRC2021, p. 406. [Google Scholar] [CrossRef]
- Olinto, A.; Krizmanic, J.; Adams, J.; Aloisio, R.; Anchordoqui, L.; Anzalone, A.; Bagheri, M.; Barghini, D.; Battisti, M.; Bergman, D.R.; et al. The POEMMA (Probe of Extreme Multi-Messenger Astrophysics) observatory. J. Cosmol. Astropart. Phys. 2021, 2021, 7. [Google Scholar] [CrossRef]
- Antonov, R.; Bonvech, E.; Chernov, D.; Dzhatdoev, T.; Finger, M.; Finger, M.; Podgrudkov, D.; Roganova, T.; Shirokov, A.; Vaiman, I. The SPHERE-2 detector for observation of extensive air showers in 1 PeV–1 EeV energy range. Astropart. Phys. 2020, 121, 102460. [Google Scholar] [CrossRef]
- Augur Balloon Systems. Available online: http://augur-as.ru (accessed on 23 December 2021).
- GPS 16x Technical Specifications. Available online: https://static.garmincdn.com/pumac/GPS16x_TechnicalSpecifications.pdf (accessed on 23 December 2021).
- Reliable Prognosis. Available online: http://rp5.ru/Weather_in_the_world (accessed on 23 December 2021).
- Antonov, R.; Bonvech, E.; Chernov, D.; Dzhatdoev, T.; Galkin, V.; Podgrudkov, D.; Roganova, T. Spatial and temporal structure of EAS reflected Cherenkov light signal. Astropart. Phys. 2019, 108, 24–39. [Google Scholar] [CrossRef] [Green Version]
- Antokhonov, B.; Besson, D.; Beregnev, S.; Budnev, N.M.; Chvalaev, O.B.; Chiavassa, A.; Gress, O.A.; Kalmykov, N.N.; Karpov, N.N.; Koresteleva, E.E.; et al. A new 1 km2 EAS Cherenkov array in the Tunka Valley. Nucl. Instrum. Methods Phys. Res. Sect. A Accel. Spectrometers Detect. Assoc. Equip. 2011, 639, 42–45. [Google Scholar] [CrossRef] [Green Version]
- Heck, D.; Knapp, J.; Capdevielle, J.N.; Schatz, G.; Thouw, T. CORSIKA: A Monte Carlo code to simulate extensive air showers. Rep. FZKA 1998, 6019, 1–90. [Google Scholar] [CrossRef]
- Antonov, R.A.; Aulova, T.V.; Bonvech, E.A.; Chernov, D.V.; Dzhatdoev, T.A.; Finger, M.; Finger, M.; Galkin, V.I.; Podgrudkov, D.A.; Roganova, T.M. Event-by-event study of CR composition with the SPHERE experiment using the 2013 data. J. Phys. Conf. Ser. 2015, 632, 012090. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year | Flights | PMT Number | Time, Hours |
|---|---|---|---|
| test runs | |||
| 2008 | 1 | 20 | 1 |
| 2009 | 3 | 64 | 13 |
| 2010 | 6 | 96 | 30 |
| experiment runs | |||
| 2011 | 4 | 96 | 30 |
| 2012 | 5 | 108 + 1 | 31 |
| 2013 | 5 | 108 + 1 | 33 |
| Interval | Parameter | Data | Accuracy | Range | Units |
|---|---|---|---|---|---|
| 1 s | Detector position | GPS altitude | (1) * | −1500–18,000 | m a.s.l. |
| GPS position | 3–5 (2) * | — | m | ||
| GPS time (PPS) | 1 | — | s | ||
| Detector orientation | inclination angles (resolution) X,Y | 0.3 (0.02) * | −25–25 | deg | |
| compass azimuth (resolution) Z | 2.5 (0.5) * | 0–360 | deg | ||
| Control block | inner temperature | 1.5 | −40–70 | °C | |
| 1 min | PMT status | anode current | 0.03 | 0–125 | A |
| mosaic temperature | 1.5 | −40–70 | °C | ||
| Power source | high voltage (HV1) | 0.1 | 0–250 | V | |
| Barometer | pressure | 5 | 750–1100 | hPa | |
| temperature | 2 | −20–60 | °C | ||
| Balloon barometer | pressure | 3 | 0–1000 | Pa | |
| Battery (19 V) | voltage | 0.01 | 0–40 | V | |
| Constant voltage (5 V) | voltage | 0.01 | 0–40 | V | |
| 10 min | PMT status | first dinode voltage | 0.06 | 0–250 | V |
| PMT temperature | 0.1 | −30–50 | °C | ||
| supply voltage | 0.006 | 0–25 | V | ||
| Trigger | counting rate | – | 0–65,536 | ||
| FADC boards | voltage (1.2, 2.5, 2.8) | 0.001 | 0–4 | V |
| Model/Primary | Mean | Variation | Relative Variation |
|---|---|---|---|
| Pair | m | ||
| 3/4 | 1.015 | 0.0490 | 0.0483 |
| 11/3 | 0.9834 | 0.0511 | 0.0520 |
| 11/4 | 0.9963 | 0.0443 | 0.0445 |
| p/Fe | 1.232 | 0.0686 | 0.0557 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bonvech, E.; Chernov, D.; Finger, M.; Finger, M.; Galkin, V.; Podgrudkov, D.; Roganova, T.; Vaiman, I. EAS Observation Conditions in the SPHERE-2 Balloon Experiment. Universe 2022, 8, 46. https://doi.org/10.3390/universe8010046
Bonvech E, Chernov D, Finger M, Finger M, Galkin V, Podgrudkov D, Roganova T, Vaiman I. EAS Observation Conditions in the SPHERE-2 Balloon Experiment. Universe. 2022; 8(1):46. https://doi.org/10.3390/universe8010046
Chicago/Turabian StyleBonvech, Elena, Dmitry Chernov, Miroslav Finger, Michael Finger, Vladimir Galkin, Dmitry Podgrudkov, Tatiana Roganova, and Igor Vaiman. 2022. "EAS Observation Conditions in the SPHERE-2 Balloon Experiment" Universe 8, no. 1: 46. https://doi.org/10.3390/universe8010046
APA StyleBonvech, E., Chernov, D., Finger, M., Finger, M., Galkin, V., Podgrudkov, D., Roganova, T., & Vaiman, I. (2022). EAS Observation Conditions in the SPHERE-2 Balloon Experiment. Universe, 8(1), 46. https://doi.org/10.3390/universe8010046