
Toward Automated Coronal Observations: A New Integrated System Based on the Lijiang 10 cm Coronagraph

 ,
,  , and
, and
Abstract
1. Introduction
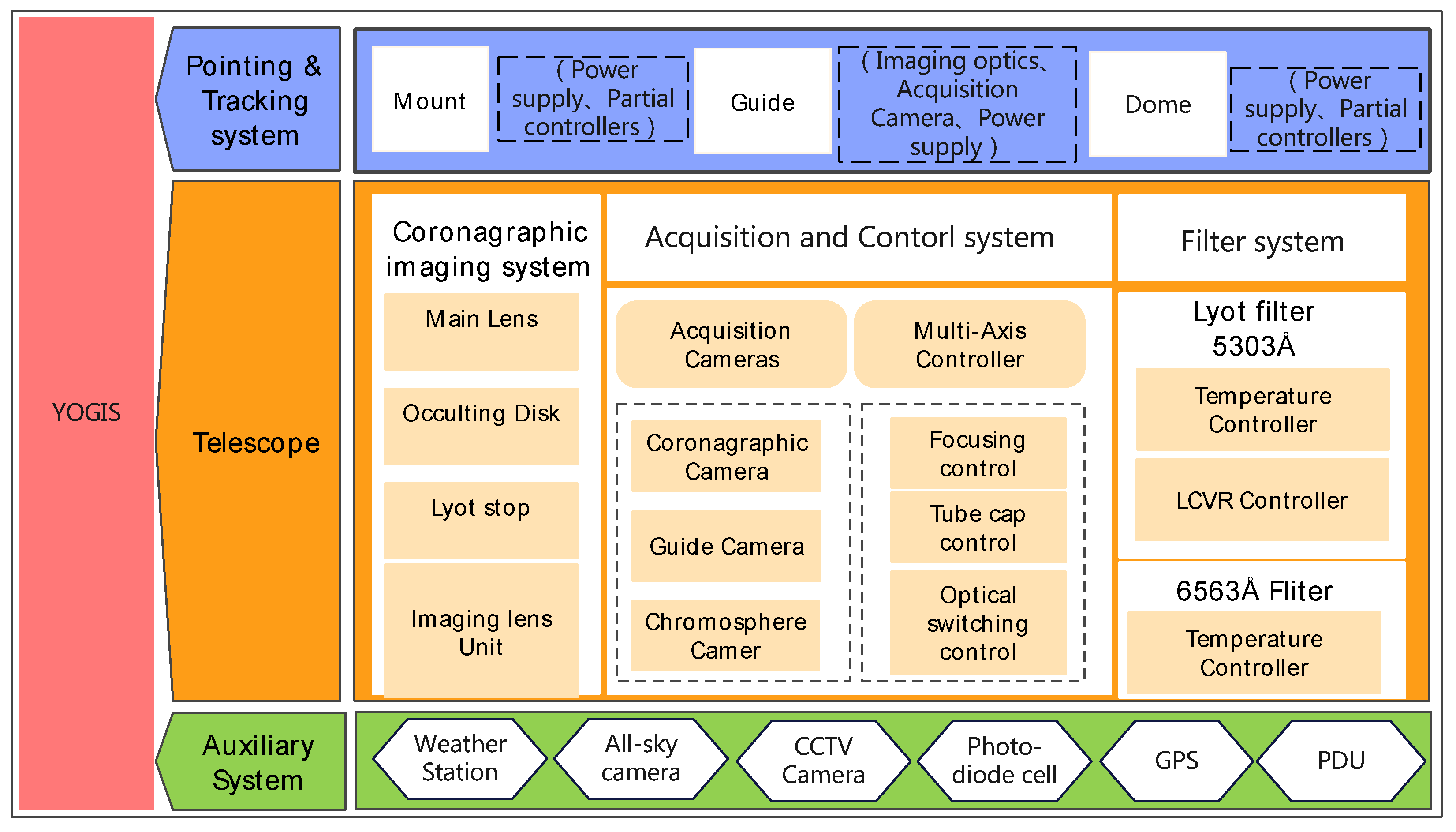
2. System Components of YOGIS
2.1. Telescope System
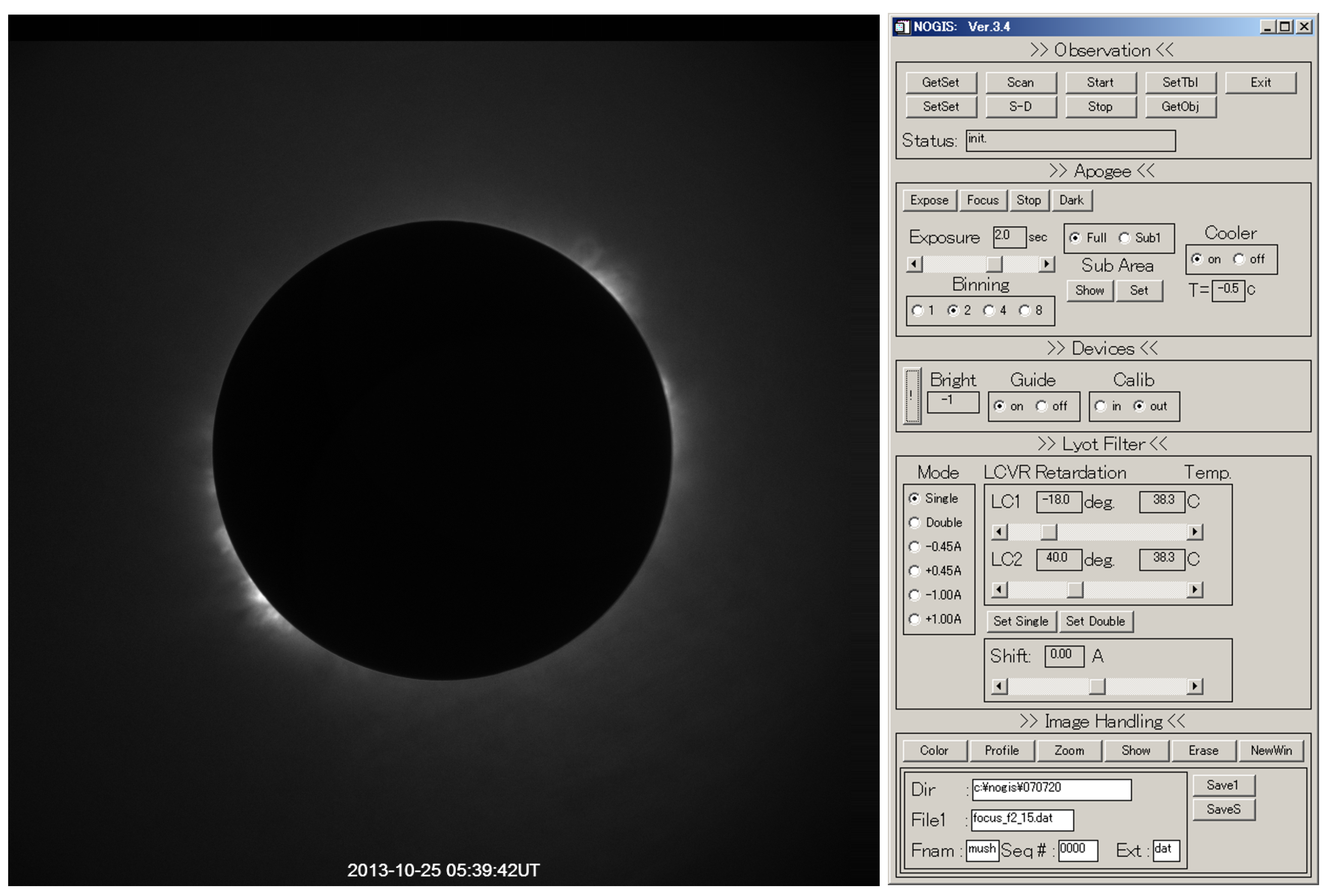
- Optical System: The structural diagram of the YOGIS telescope’s optical system is presented in image C at the bottom of Figure 3. This telescope utilizes the classical optical configuration of a Lyot-type coronagraph. The effective aperture of the telescope measures 10 cm, with a primary mirror focal length of 149 cm. YOGIS is designed to observe wavelengths where the coronal signal is pronounced, particularly the Fe XIV line (coronal green line, central wavelength 5303 Å), and it is also capable of observing prominences at a central wavelength of 6563 Å through the use of a spectroscopic prism. Additionally, an optical pathway is implemented to monitor the Sun’s position relative to the occulter, thereby ensuring precise coronal observations. The optical system is similar to that of NOGIS, and enhancements have been made to its electronic control to facilitate autonomous integrated observation.
- Filter System: The telescope system comprises two narrow-band filters: a Lyot filter with a central wavelength of 5303 Å and a Daystar brand Quantum series filter with a central wavelength of 6563 Å. The Lyot filter serves as a fundamental component of the telescope system, providing the narrow-band (typically∼1 Å) central wavelength necessary for coronagraphic observations. Additionally, it facilitates the tuning of the passband wavelength, enabling multi-band observation of spectral lines and effective subtraction of sky background, which is essential for achieving a higher signal-to-noise ratio in coronal imaging. The Full Width at Half Maximum (FWHM) of the Lyot filter’s transmission band is 1 Å, and wavelength tuning is achieved through a Liquid Crystal Variable Retarder (LCVR), which has a tuning range of −2 Å to +2 Å and a tuning time of less than 60 ms. Detailed designs of the Lyot filter will be discussed in a subsequent study. Based on the characteristics of the Lyot filter, a controller was developed for tuning the transmission band wavelength. This controller functions as a waveform generator that regulates LCVR’s delay angle using varying amplitudes of a 2 kHz square wave, thereby enabling the adjustment of the central wavelength of the passband. Additionally, a temperature controller has been implemented for the electronic regulation of the Lyot filter. In contrast, the other solar chromosphere filter is a well-established commercial product that requires only temperature control and does not necessitate real-time adjustments.
- Acquisition and Control System: The acquisition system is fundamentally composed of three imaging cameras. The primary channel serves as the main camera for capturing coronagraph images, while the second channel is designated for capturing images of solar prominences. The third channel is responsible for monitoring the Sun’s position in relation to the occulter. The specific parameters of these three cameras are detailed in Table 1. Data transfer and parameter control for the cameras are facilitated using a USB 3.0 interface; consequently, a fiber-optic USB 3.0 hub has been installed on the telescope to effectively manage the data acquisition and control processes for all three cameras.To enhance the integrated control of the entire telescope system, this study developed a multi-axis controller that supersedes the previous manual adjustment mechanisms. This multi-axis controller is organized into four control channels. The first channel is responsible for the operation of the telescope’s mirror cover, which can be substituted with a flat field plate for flat field imaging. The second channel manages the focusing of the primary mirror, while the third channel oversees the switching of the optical path; this switching allows for imaging of the primary mirror to evaluate the extent of dust accumulation. The fourth channel is dedicated to the focusing of the rear-end imaging system. The design of the multi-axis controller is tailored to meet the observational requirements of YOGIS, employing a GALIL DMC-500 EtherCAT Master multi-axis motion controller. This controller is connected to the control computer using an Ethernet port, thereby facilitating efficient control of the four motors.
2.2. Pointing and Tracking System
- Dome: The dome serves as a protective structure for the telescope, shielding it from external elements like precipitation and particulate matter, while also reducing wind loading effects on the instruments. Due to the consistently low average wind speeds recorded throughout the year at Gaomeigu Observatory [12], a full-sky dome devoid of a skylight has been implemented. This design choice eliminates the necessity for real-time adjustments of the skylight position and enhances Dome-Seeing. The fabrication of the dome was contracted to a third-party manufacturer, whereas the design of the electronic control system was conducted internally. As a full-sky structure, the electronic control system is relatively simple. A Programmable Logic Controller (PLC) serves as the foundational control module, facilitating communication with the control host through a Transmission Control Protocol/Internet Protocol (TCP/IP) communication protocol.
- Equatorial Mount: The equatorial mount serves as the fundamental component for the pointing and tracking capabilities of the coronagraph. Specifically designed to meet the demands of coronal observation, it incorporates a fork-arm mechanical structure coupled with a worm-and-wheel transmission system, which enables solar tracking without necessitating a flip at culmination. The mechanical and electronic control systems of the equatorial mount were developed by the Nanjing Institute of Astronomical Optics and Technology, part of the National Astronomical Observatories, Chinese Academy of Sciences (CAS). This institution also provided the control interfaces and communication protocols. To facilitate integrated observation, modifications and enhancements to the software drivers were implemented based on the hardware provided by the manufacturer. Similar to the dome, the equatorial mount communicates with the control host through a TCP/IP communication protocol.
- Guide System: The guiding system employs full-disk solar image positioning techniques. First, it calculates the positional deviation of the solar center based on the full-disk images obtained from the guide mirror. Secondly, it fine-tunes the movement of the equatorial mount utilizing a Proportional–Integral–Derivative (PID) algorithm, thereby establishing a closed-loop precision tracking system. The development of the control mechanism for the guiding system was conducted independently by the authors. Following the processes of polar alignment and closed-loop tracking adjustments, the entire observational system achieves a pointing accuracy of 20″ and a tracking accuracy exceeding 5″ over a duration of 10 min, thereby fully satisfying the requirements for precise coronal observation. The guide mirror is affixed to the coronagraph, with its optical axis aligned parallel to that of the coronagraph. It primarily operates a GigE interface industrial camera, which communicates with the control computer through an Ethernet interface.
2.3. Auxiliary System
- Meteorological Station: The Davis-Vantage Pro2 6152 wireless standard meteorological station was directly purchased. This system functions as an integrated automatic meteorological station, capable of measuring various parameters including wind speed, wind direction, air temperature, relative humidity, atmospheric pressure, and rainfall. Data are automatically recorded at predetermined intervals. The fundamental configuration comprises a wireless meteorological station main unit and a wireless console equipped with software. The main unit is responsible for measuring meteorological parameters and wirelessly transmitting the data to the console, which subsequently connects to a control computer using an RS232 serial port. The software facilitates real-time display and computation of meteorological parameters, data storage, and the incorporation of essential meteorological parameter data into the header files of the main camera images.
- All-Sky Camera: The system provides real-time, intuitive visualizations of the cloud distribution and sunlight conditions across the entire sky, thereby facilitating optimal timing for observational activities. The all-sky camera is primarily composed of a fisheye lens and a ZWO-ASI178 camera, utilizing a 2.5 mm industrial lens. An acrylic protective cover was installed in front of the lens. However, over time, this cover became oxidized and discolored, adversely impacting image quality. Consequently, the cover was removed, and the camera and lens were waterproofed, which resulted in a significant enhancement of image quality. The interface connecting the camera to the control computer is established through a direct USB connection. Furthermore, a dedicated website has been developed for the all-sky camera, enabling users to monitor cloud cover information at the observation site from any location at any time.
- Solar Photometer: An essential device for intensity calibration in coronal observations, this solar photometer is designed to calibrate the intensity between the solar center and the corona. Specifically developed for the observation requirements at 5303 Å, the photometer employs a 530 nm filter in conjunction with a neutral density filter at the front end. It features a bandwidth of 10 nm and a transmission rate of 1/10,000, with a photodiode positioned at the rear for the collection of intensity data. The optical path of the photometer is aligned parallel to the main optical path of the coronagraph, facilitating the real-time acquisition of relative intensity values at the solar center.
- GPS Time Server: A GPS-based Network Time Protocol (NTP) server was procured to acquire standard time signals from GPS satellites. This server disseminates the time information through multiple interface types to devices within the automated system that necessitate accurate time data, including the control computer, dome, equatorial mount, event sequence recorder, and data processing computer. This configuration facilitates comprehensive time synchronization across the entire system.
- Power Manager: A remotely controllable Power Distribution Unit (PDU, Tesin-Sr900 series) was also directly purchased, enabling convenient control of power switches for various systems. The PDU is configured with dual routing; the first route manages power supply to devices located within the dome, while the second route is designated for the control room and additional devices.
- Surveillance Cameras: The primary function of the surveillance system is to monitor the operational status of the telescope during coronal observations, as well as the environmental conditions both inside and outside the observatory. Two surveillance cameras were installed in this study: the first is positioned within the dome to provide real-time monitoring of the coronagraph’s operational posture, while the second is located externally to observe the surrounding environment of the dome and its vicinity. These surveillance cameras are advanced products from Hikvision, which facilitate image sharing across multiple devices and computers through an Ethernet network.
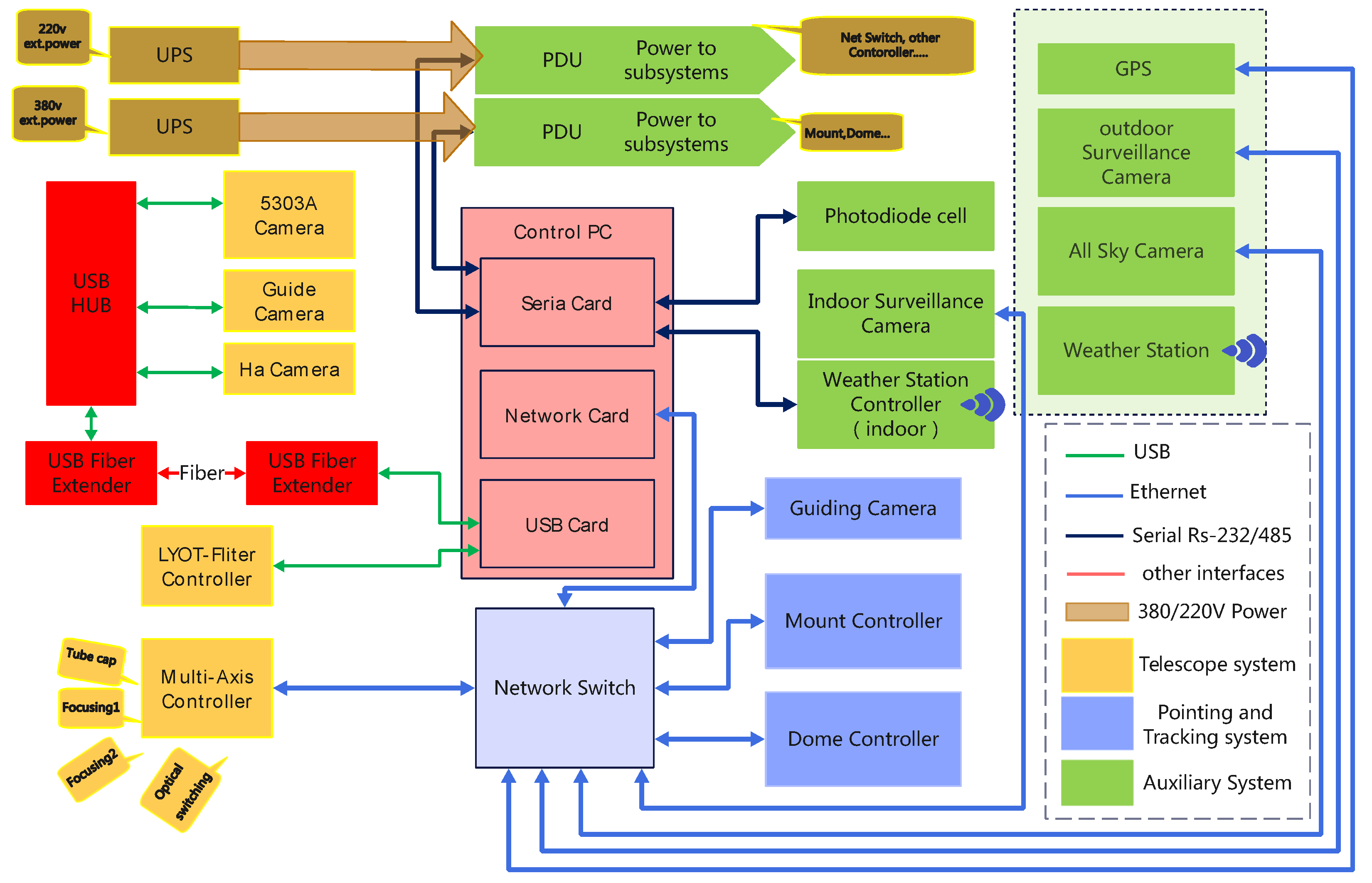
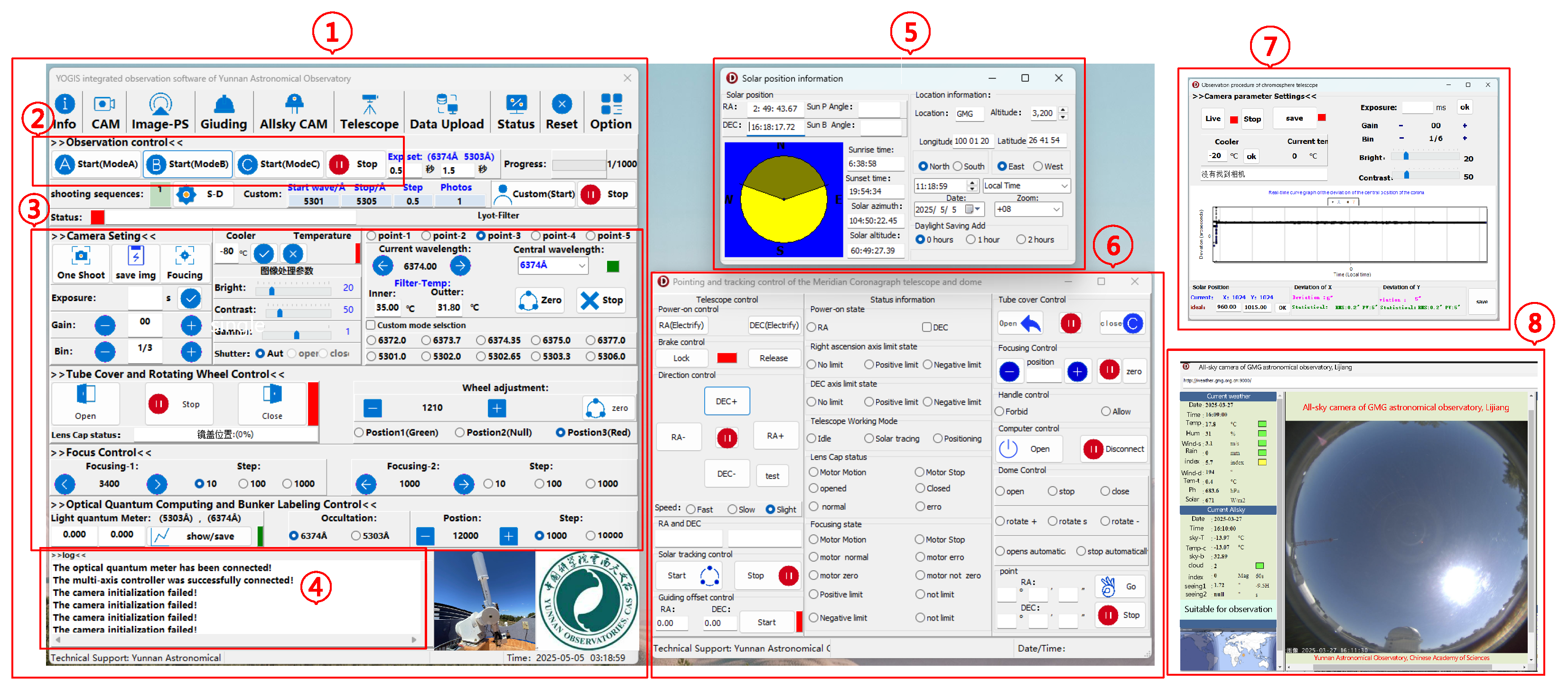
2.4. YOGIS Integrated System Interface Configuration
3. Software Design
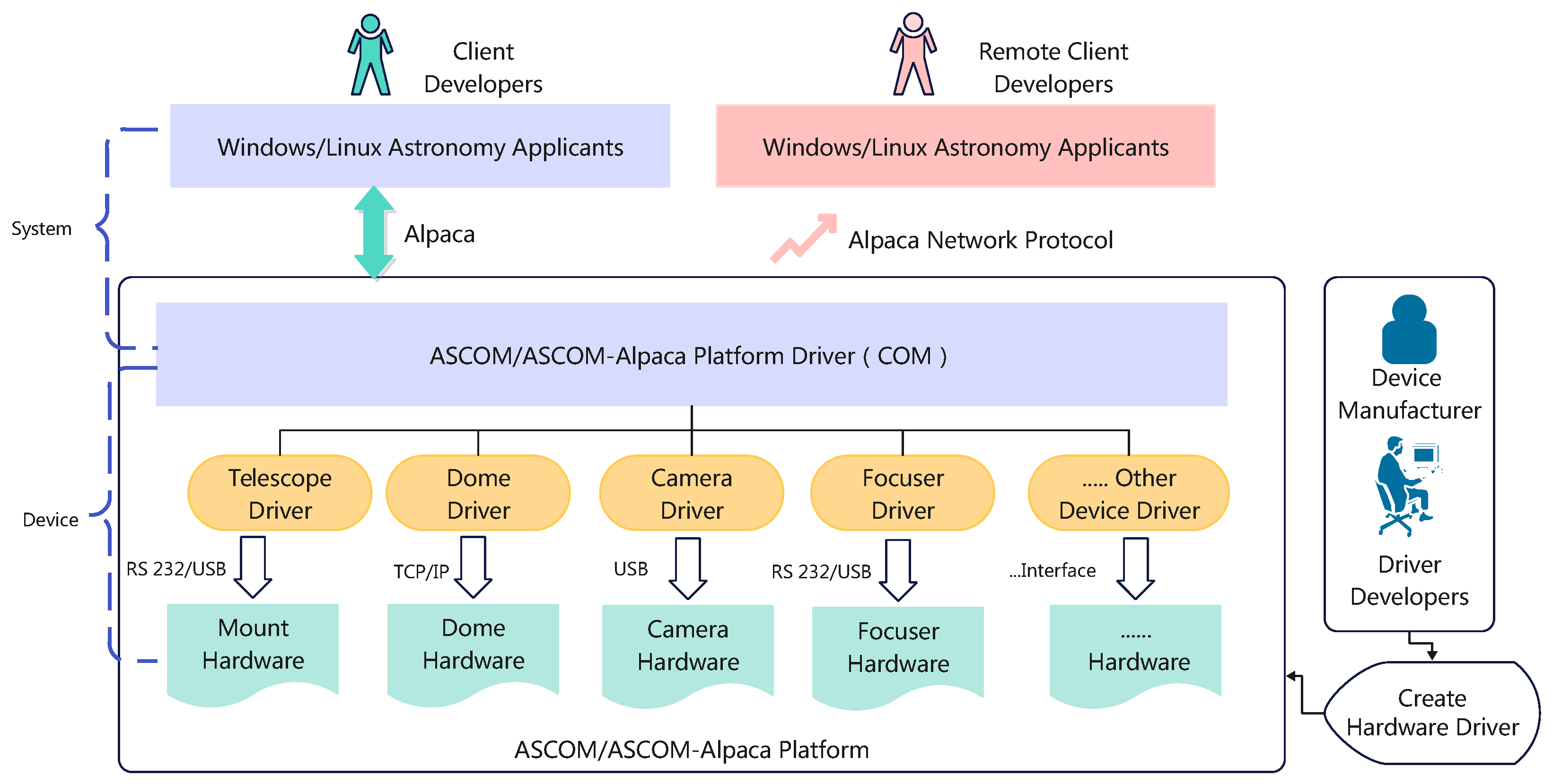
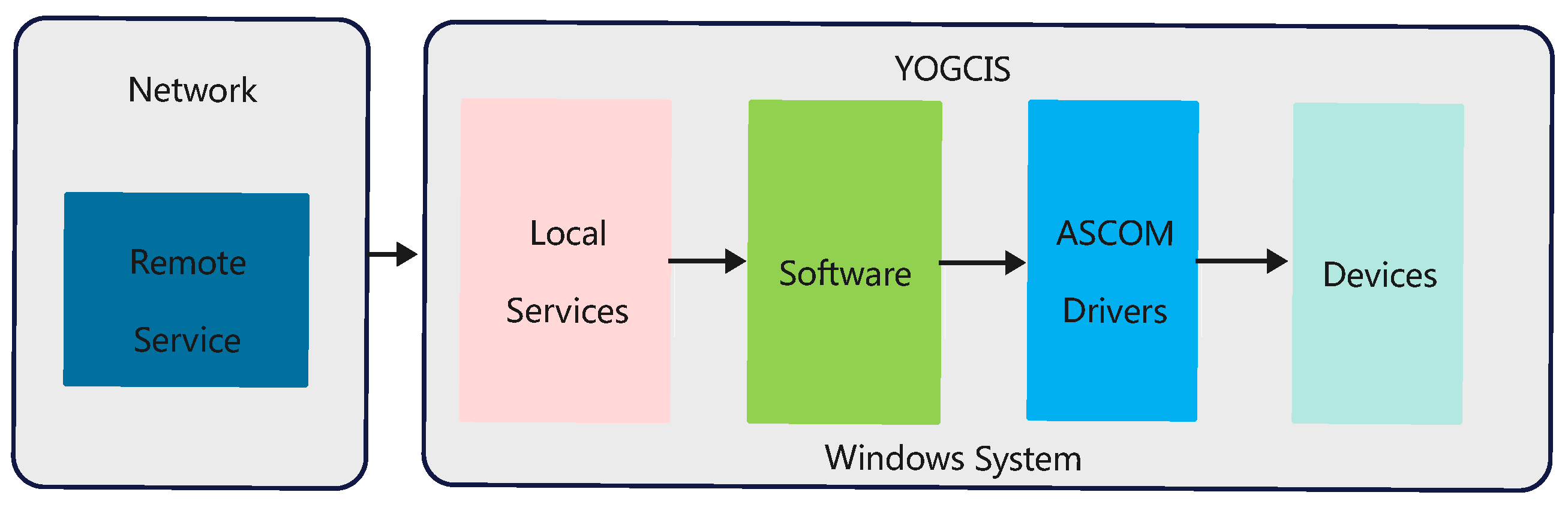
3.1. Selection of Framework and Platform
3.2. Software Concept
4. Autonomous Observation
4.1. Observation Modes and Observation Process
- Once aligned with the Sun, a preliminary capture in the single-band wavelength is performed to assess image signal strength. Based on this assessment, the system automatically adjusts exposure time, typically ranging from 500 ms to 2 s.
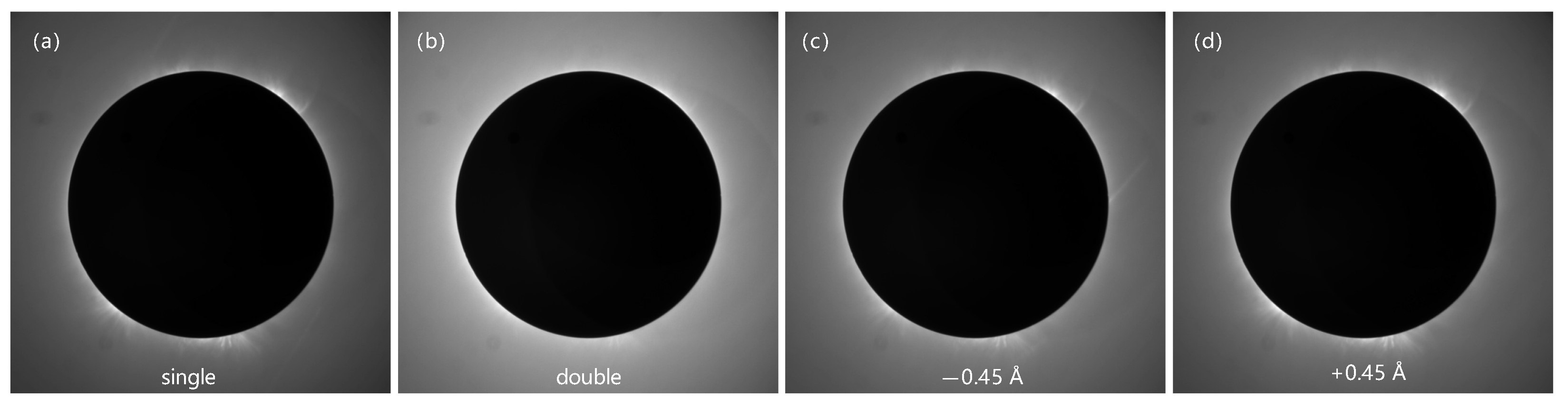
- After exposure settings are optimized, rapid captures in both the single and double bands are taken. These images are then subtracted to create an S-D image, effectively removing the sky background. Analysis of S-D image identifies regions of interest in coronal activity.
- With the regions of interest established, the system controls the Lyot filter and camera to sequentially capture data across all four observation bands. For each image, relevant metadata—including solar photometer readings, solar center coordinates, exposure settings, and meteorological parameters—are recorded in the respective FITS files, with a log entry generated for each storage event.
- Upon completion of the four-band capture sequence, the coronal image is calibrated using the formula to produce a calibrated coronal image, where represents the calibrated coronal image and , and represent the images captured in the four bands; , and represent the calibration coefficients. Following the repetition of the capture process across all four spectral bands three times and the subsequent averaging of the results, the final image designated for storage at Level 0 is produced. Additionally, the image data and corresponding header information are stored in a separate FITS file, as mandated. The calibrated and processed images are presented in a different window. Given that an LCVR is employed for the wavelength tuning of the filter, the switching time for the passband wavelength is notably brief (less than 60 ms). Consequently, the acquisition of a complete set of images typically requires less than 30 s.
- Steps (1) through (4) are repeated to establish the standard observation cycle, allowing continuous and automated coronal observation.
4.2. Status Monitor and Alarm Mechanism
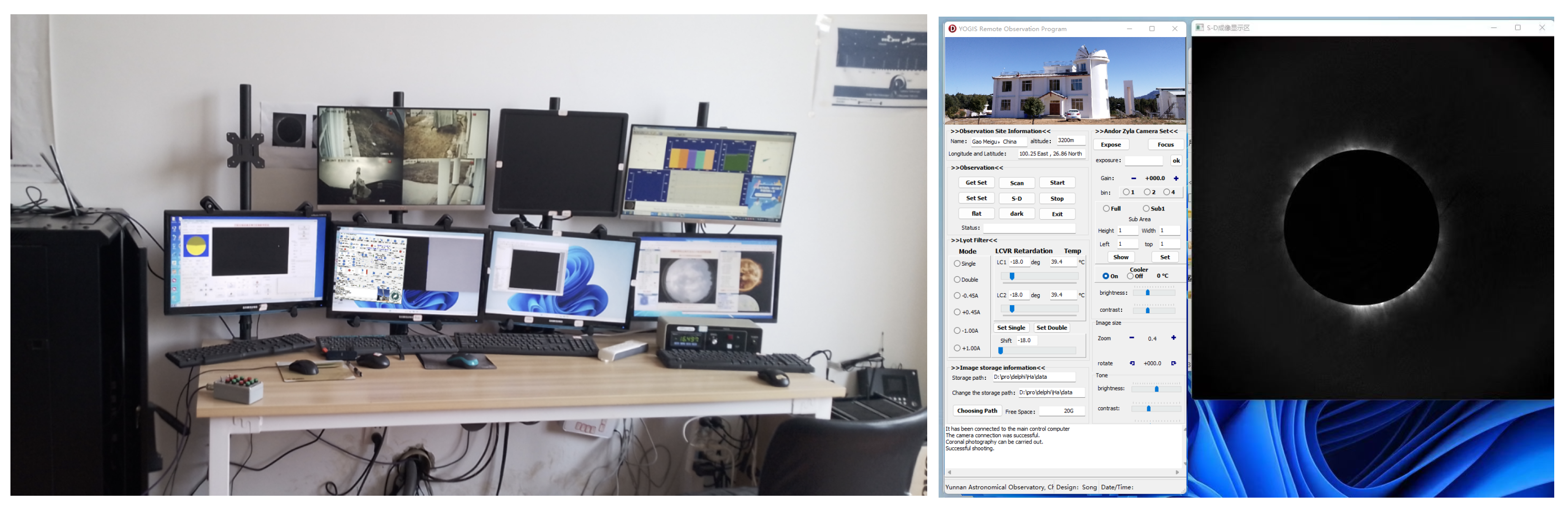
5. Practical Observations
6. System Performance Metrics
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ichimoto, K.; Noguchi, M.; Tanaka, N.; Kumagai, K.; Shinoda, K.; Nishino, T.; Fukuda, T.; Sakurai, T.; Takeyama, N. A new imaging system of the corona at norikura. Publ. Astron. Soc. Jpn. 1999, 51, 383–391. [Google Scholar] [CrossRef]
- Liu, Y. The first coronagraph in China settled in Lijiang, Yunnan. Amat. Astron. 2014, 1, 60–63. [Google Scholar]
- Cui, C.; Li, J.; Cai, X.; Fan, Y.; Wang, F.; Cao, Z.; Su, L.; Fan, D.; Qiao, C.; He, B.; et al. Robotic Autonomous Observatory Network Review. Prog. Astron. 2013, 31, 141–159. [Google Scholar]
- Jian, W.; Ge, J.; Xiaoqi, Y.; Kun, H.; Feng, L.; Jian, R. The design of observatory control system of LAMOST. Plasma Sci. Technol. 2006, 8, 347. [Google Scholar] [CrossRef]
- Wang, Z.; Tian, Y.; Li, J.; Cao, Z.H.; Zhao, Y.H. A study on universal observation control system and its application for LAMOST. Res. Astron. Astrophys. 2021, 21, 149. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, X.; Song, T.; Sun, M.; Liu, D.; Wang, J.; Zhao, M.; Zhang, T.; Xu, F.; Fu, H.; et al. Ground experiment of a 50 mm balloon-borne coronagraph for near space project. In Proceedings of the 10th International Symposium on Advanced Optical Manufacturing and Testing Technologies: Large Mirror and Telescopes, Chengdu, China, 13 December 2021; SPIE: Bellingham, WA, USA, 2021; Volume 12070, pp. 94–100. [Google Scholar]
- Liu, Y.; Zhang, X. The coronal green line monitoring: A traditional but powerful tool for coronal physics. Proc. Int. Astron. Union 2018, 13, 169–170. [Google Scholar] [CrossRef]
- Gong, Q.; Socker, D. Theoretical study of the occulted solar coronagraph. In Proceedings of the Optical Systems Degradation, Contamination, and Stray Light: Effects, Measurements, and Control, Denver, CO, USA, 15 October 2004; SPIE: Bellingham, WA, USA, 2004; Volume 5526, pp. 208–219. [Google Scholar]
- Zhang, X.F.; Liu, Y.; Zhao, M.Y.; Liu, J.H.; Elmhamdi, A.; Song, T.F.; Li, Z.H.; Li, H.B.; Sha, F.Y.; Wang, J.X.; et al. Comparison of the Coronal Green-line Intensities with the EUV Measurements from SDO/AIA. Res. Astron. Astrophys. 2022, 22, 075012. [Google Scholar] [CrossRef]
- Zhang, X.F.; Liu, Y.; Zhao, M.Y.; Song, T.F.; Wang, J.X.; Li, X.B.; Li, Z.H. On the relation between coronal green line brightness and magnetic fields intensity. Res. Astron. Astrophys. 2022, 22, 075007. [Google Scholar] [CrossRef]
- Sha, F.; Liu, Y.; Zhang, X.; Song, T. Characterization and correction of the scattering background produced by dust on the objective lens of the Lijiang 10-cm coronagraph. Sol. Phys. 2023, 298, 139. [Google Scholar] [CrossRef]
- Xin, Y.X.; Bai, J.M.; Lun, B.L.; Fan, Y.F.; Wang, C.J.; Liu, X.W.; Yu, X.G.; Ye, K.; Song, T.F.; Chang, L.; et al. Astronomical site monitoring system at Lijiang observatory. Res. Astron. Astrophys. 2020, 20, 149. [Google Scholar] [CrossRef]
- Zhao, M.; Liu, Y.; Elmhamdi, A.; Kordi, A.; Zhang, X.; Song, T.; Tian, Z. Conditions for coronal observations at the Lijiang Observatory in 2011. Sol. Phys. 2018, 293, 1–13. [Google Scholar] [CrossRef]
- ASCOM—Standards for Astronomy [Web]. Available online: https://www.ascom-standards.org/ (accessed on 5 May 2025).
- Kozłowski, S.; Sybilski, P.; Konacki, M.; Pawłaszek, R.; Ratajczak, M.; Hełminiak, K.; Litwicki, M. Project Solaris, a Global Network of Autonomous Observatories: Design, Commissioning, and First Science Results. Publ. Astron. Soc. Pac. 2017, 129, 105001. [Google Scholar] [CrossRef]
- Wu, P.; Luo, C. ASCOM based research on the universal control protocol of telescope. In Proceedings of the 7th International Symposium on Advanced Optical Manufacturing and Testing Technologies: Design, Manufacturing, and Testing of Micro-and Nano-Optical Devices and Systems, Harbin, China, 21 August 2014; SPIE: Bellingham, WA, USA, 2014; Volume 9283, pp. 184–189. [Google Scholar]
- Ricci, D.; Cabona, L.; Tosi, S.; Zappatore, S. Toward the remotization and robotization of the OARPAF Telescope. In Proceedings of the Observatory Operations: Strategies, Processes, and Systems IX; SPIE: Bellingham, WA, USA, 2022; Volume 12186, pp. 189–195. [Google Scholar]
- Song, T.F. YNAO Coronagraph [Web]. Available online: http://sss.ynao.ac.cn/ (accessed on 5 May 2025).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Channel | Camera | Parameters | Field of View |
|---|---|---|---|
| 5303 Å camera | Dhyana 95 V2 | Pixel size: 11 m × 11 m Resolution ratio: Sensor type: BSI sCMOS | |
| 6328 Å camera | QHY 533 | Pixel size: 3.76 m × 3.76 m Resolution ratio: Sensor type: SONY IMX533C | |
| Guide camera | ASI-178 | Pixel size: 2.4 m × 2.4 m Resolution ratio: Sensor type: BSI sCMOS |
| Parameter | Definition | Warning Threshold | Warning Level | Corresponding Action |
|---|---|---|---|---|
| CCD_S | Camera status | ≠0 | High | H/(M) |
| CCD_T | Camera cooling temperature | >−20 °C | Medium | E/(A) |
| Filter_S | LCVR filter status | High | H/(M) | |
| Filter_T | Filter temperature control value | <40 °C | Medium | E/(A) |
| P_d | Deviation from the solar center | >5 arcsec | Medium | E/(A) |
| Solar_I | Solar intensity (used to determine if direct sunlight is present) | <10 mw | Medium | E/(A) |
| Mount current | >5 A | Low | E/(A) | |
| Dome status | ≠1 | High | H/(M) | |
| Cloudiness | Cloud amount seen by all-sky camera | >60% | High | C/(M) |
| Humidity | Humidity from weather station | >70% | High | C/(A) |
| Wind speed | Average wind speed from weather station | >10 m/s | High | C/(A) |
| F1 | Disk space | <1 GB | Low | C/(A) |
| Year | Annual Observable Times | Actual Observational Times | MTBF |
|---|---|---|---|
| 2021 | 1789.6 (h) | 1646.6 (h) | 1102 |
| 2022 | 1690.3 (h) | 1554.8 (h) | 1096 |
| 2023 | 1718.7 (h) | 1583.5 (h) | 1104 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, T.; Liu, Y.; Zhang, X.; Zhao, M.; Li, X.; Luo, Q.; Sha, F.; Liu, Q.; Oloketuyi, J.; Wang, X. Toward Automated Coronal Observations: A New Integrated System Based on the Lijiang 10 cm Coronagraph. Universe 2025, 11, 154. https://doi.org/10.3390/universe11050154
Song T, Liu Y, Zhang X, Zhao M, Li X, Luo Q, Sha F, Liu Q, Oloketuyi J, Wang X. Toward Automated Coronal Observations: A New Integrated System Based on the Lijiang 10 cm Coronagraph. Universe. 2025; 11(5):154. https://doi.org/10.3390/universe11050154
Chicago/Turabian StyleSong, Tengfei, Yu Liu, Xuefei Zhang, Mingyu Zhao, Xiaobo Li, Qiwang Luo, Feiyang Sha, Qiang Liu, Jacob Oloketuyi, and Xinjian Wang. 2025. "Toward Automated Coronal Observations: A New Integrated System Based on the Lijiang 10 cm Coronagraph" Universe 11, no. 5: 154. https://doi.org/10.3390/universe11050154
APA StyleSong, T., Liu, Y., Zhang, X., Zhao, M., Li, X., Luo, Q., Sha, F., Liu, Q., Oloketuyi, J., & Wang, X. (2025). Toward Automated Coronal Observations: A New Integrated System Based on the Lijiang 10 cm Coronagraph. Universe, 11(5), 154. https://doi.org/10.3390/universe11050154