Improved Indirect Model Predictive Control for Enhancing Dynamic Performance of Modular Multilevel Converter



Abstract
:1. Introduction
2. Theoretical Background
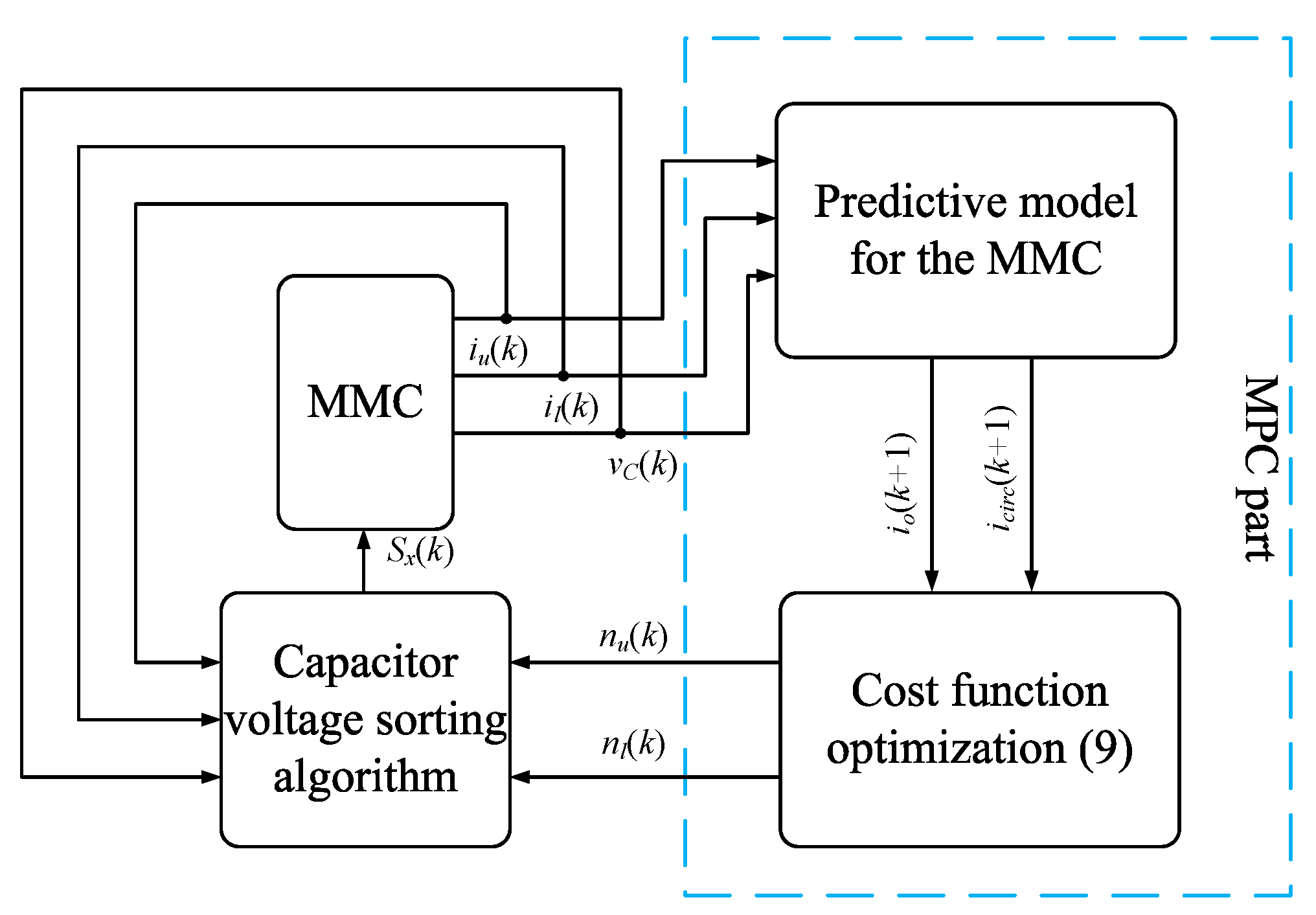
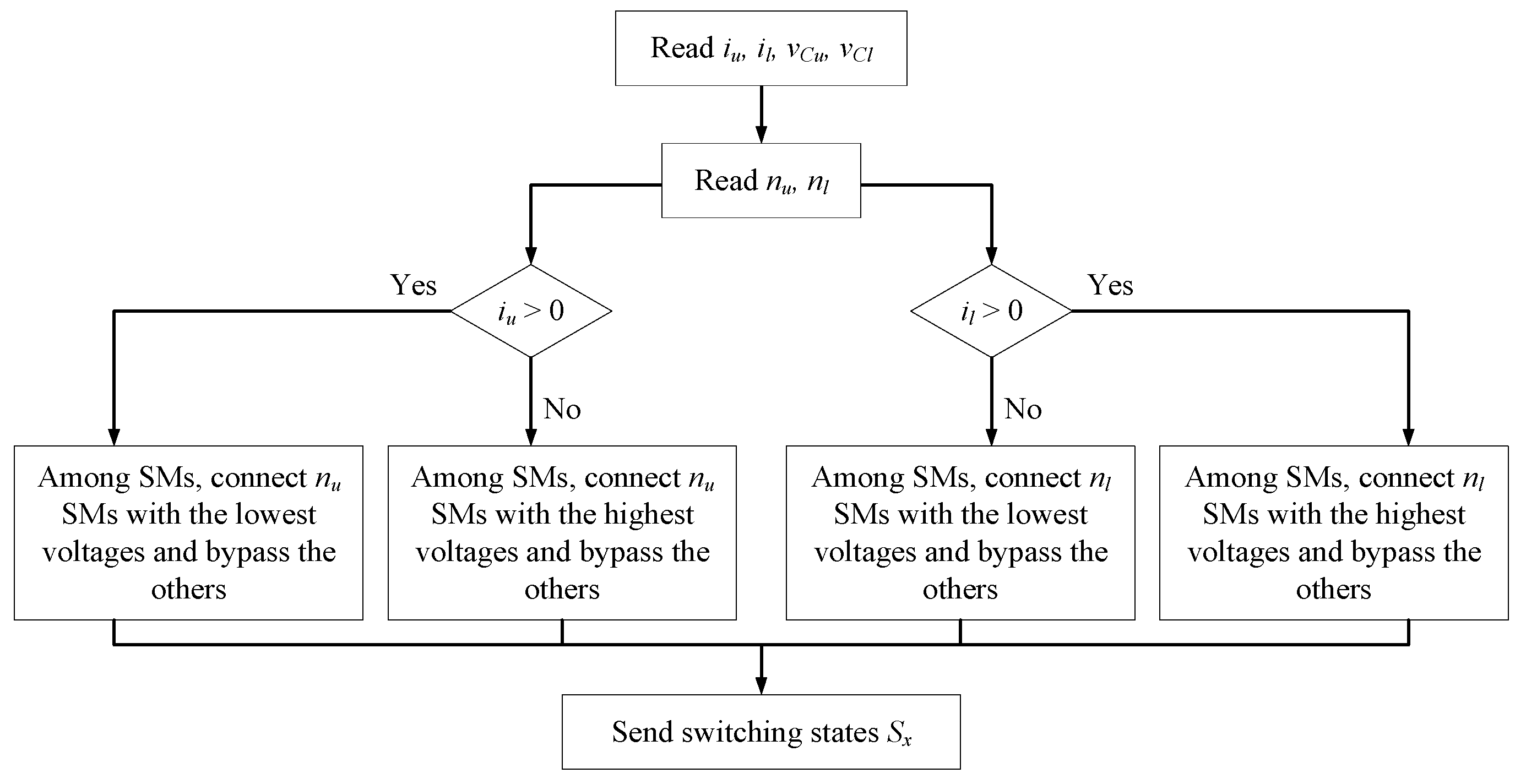
2.1. Conventional Indirect MPC
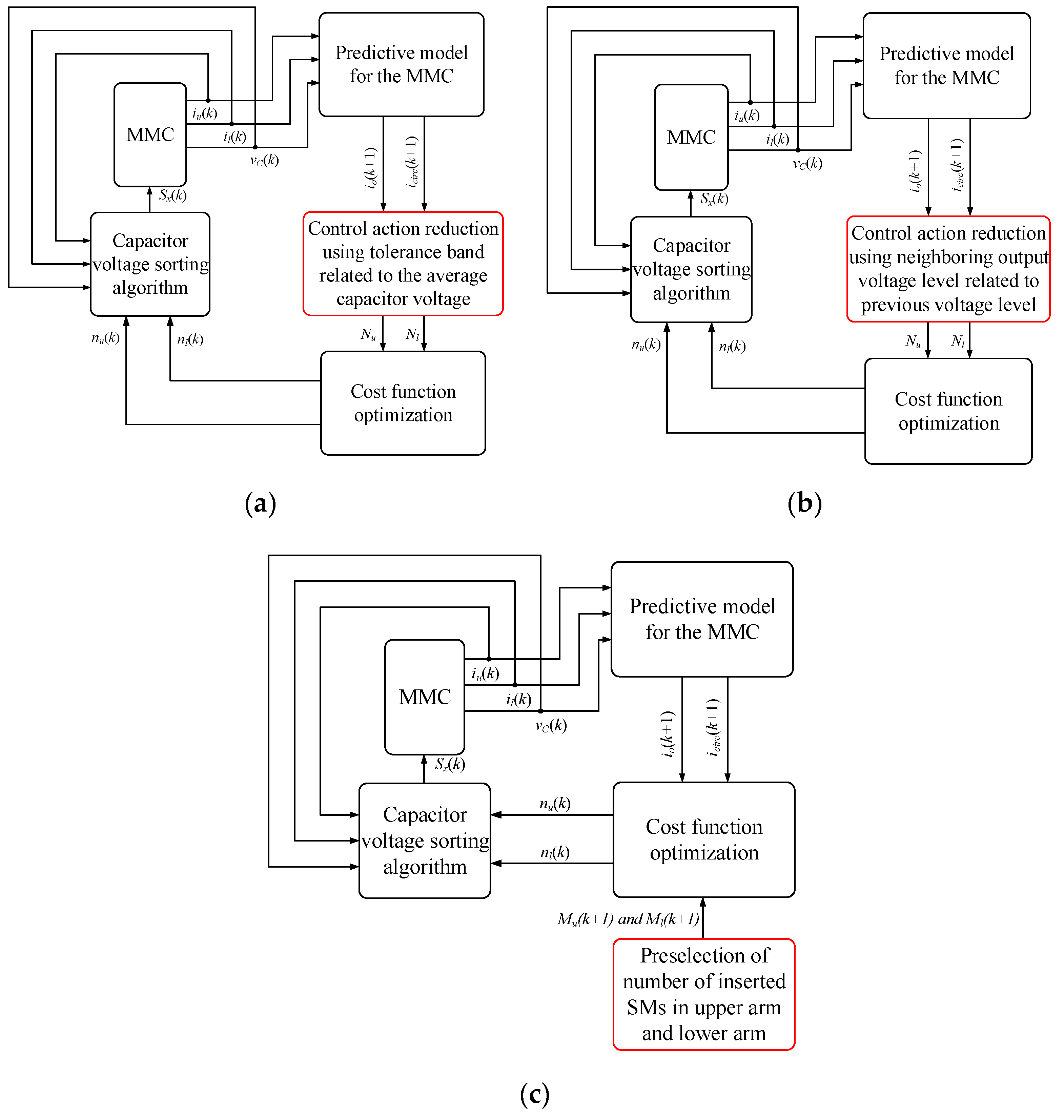
2.2. Recent Indirect MPC Approaches to Reduce the Computational Burden
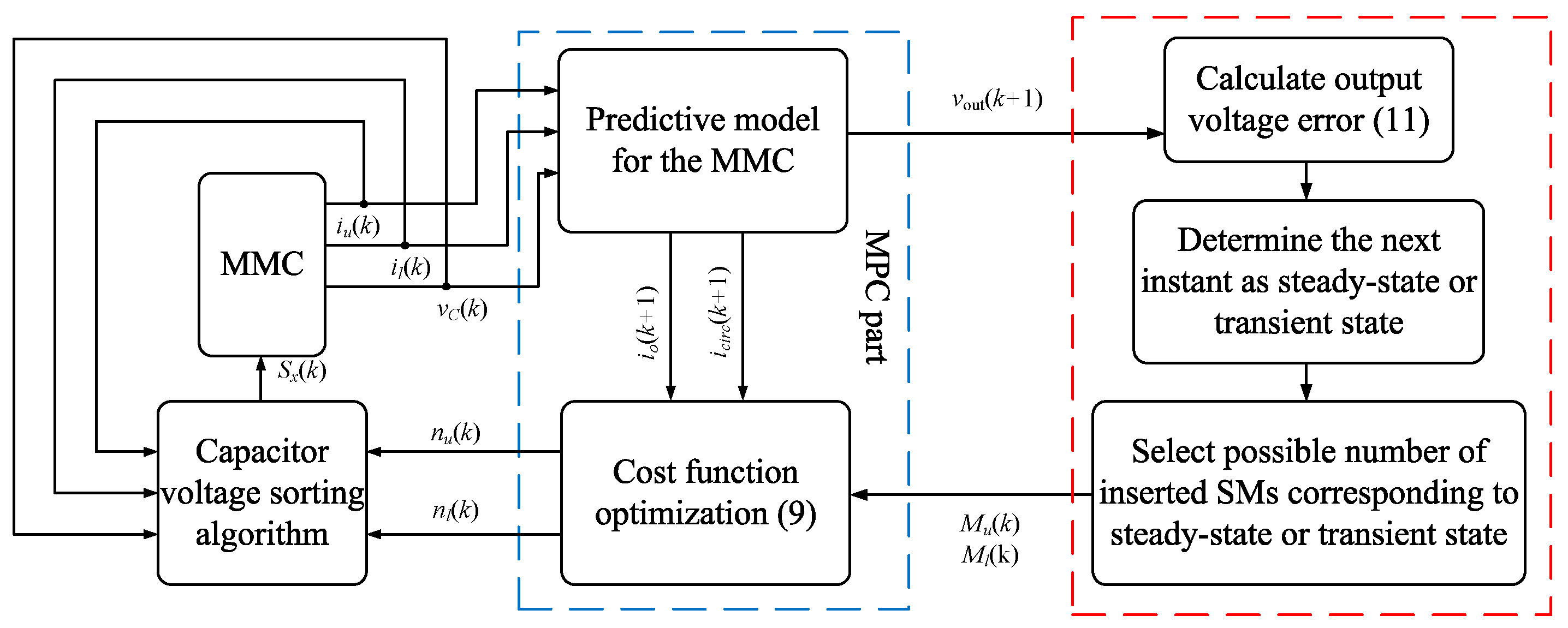
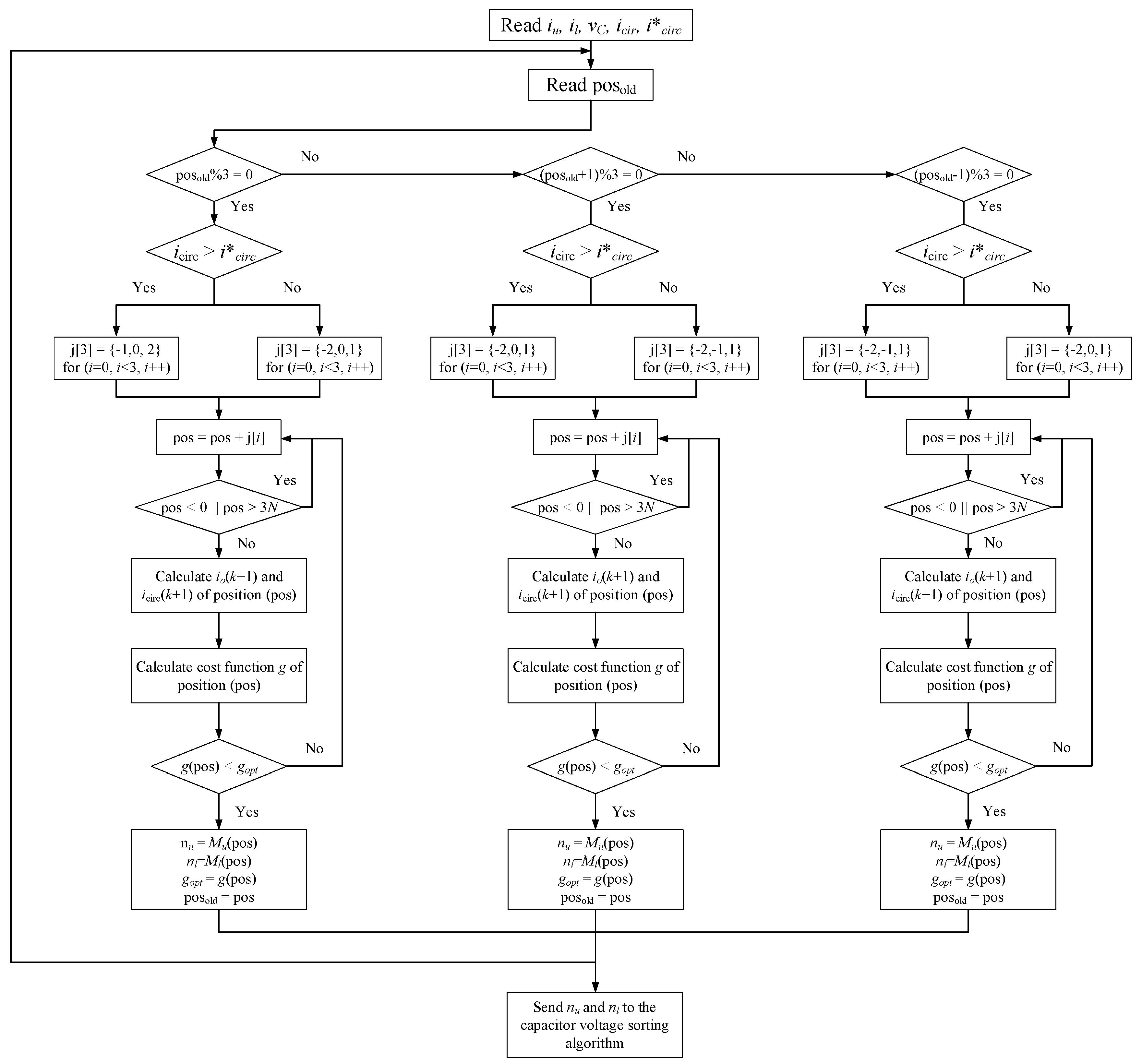
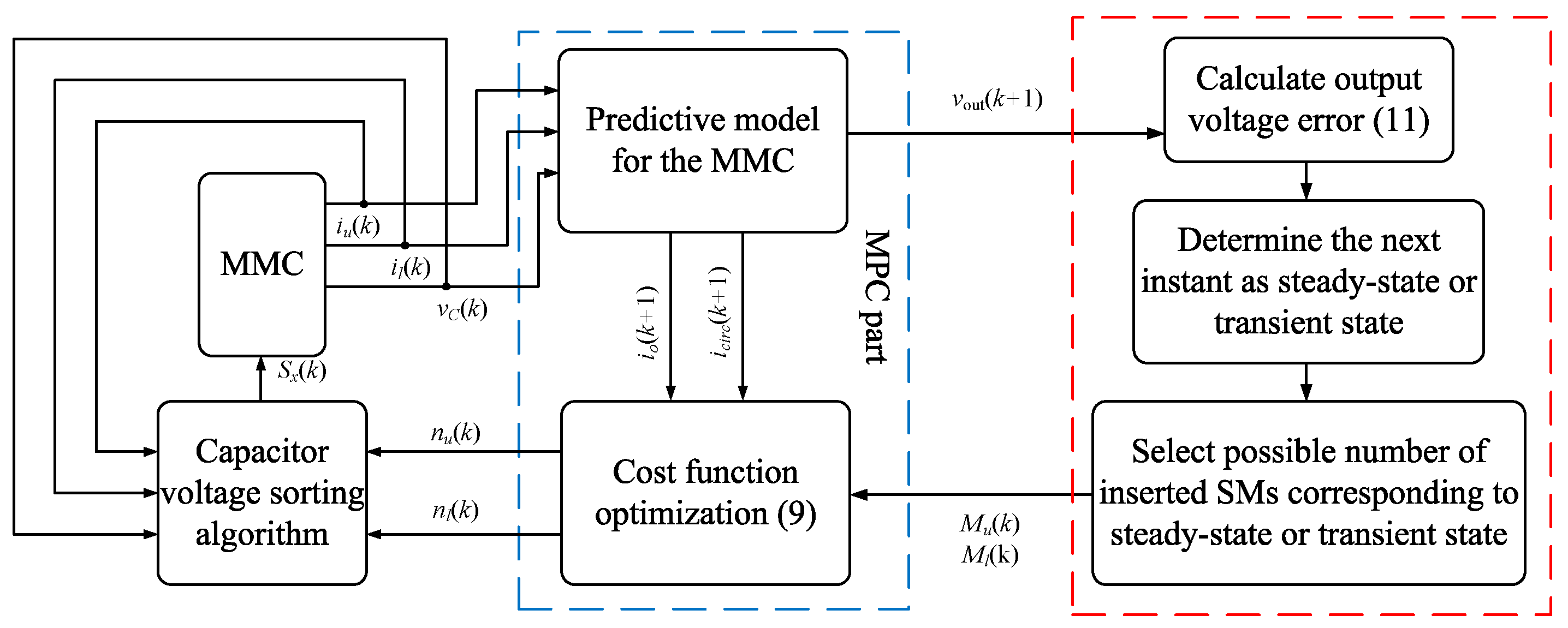
3. Proposed Indirect MPC
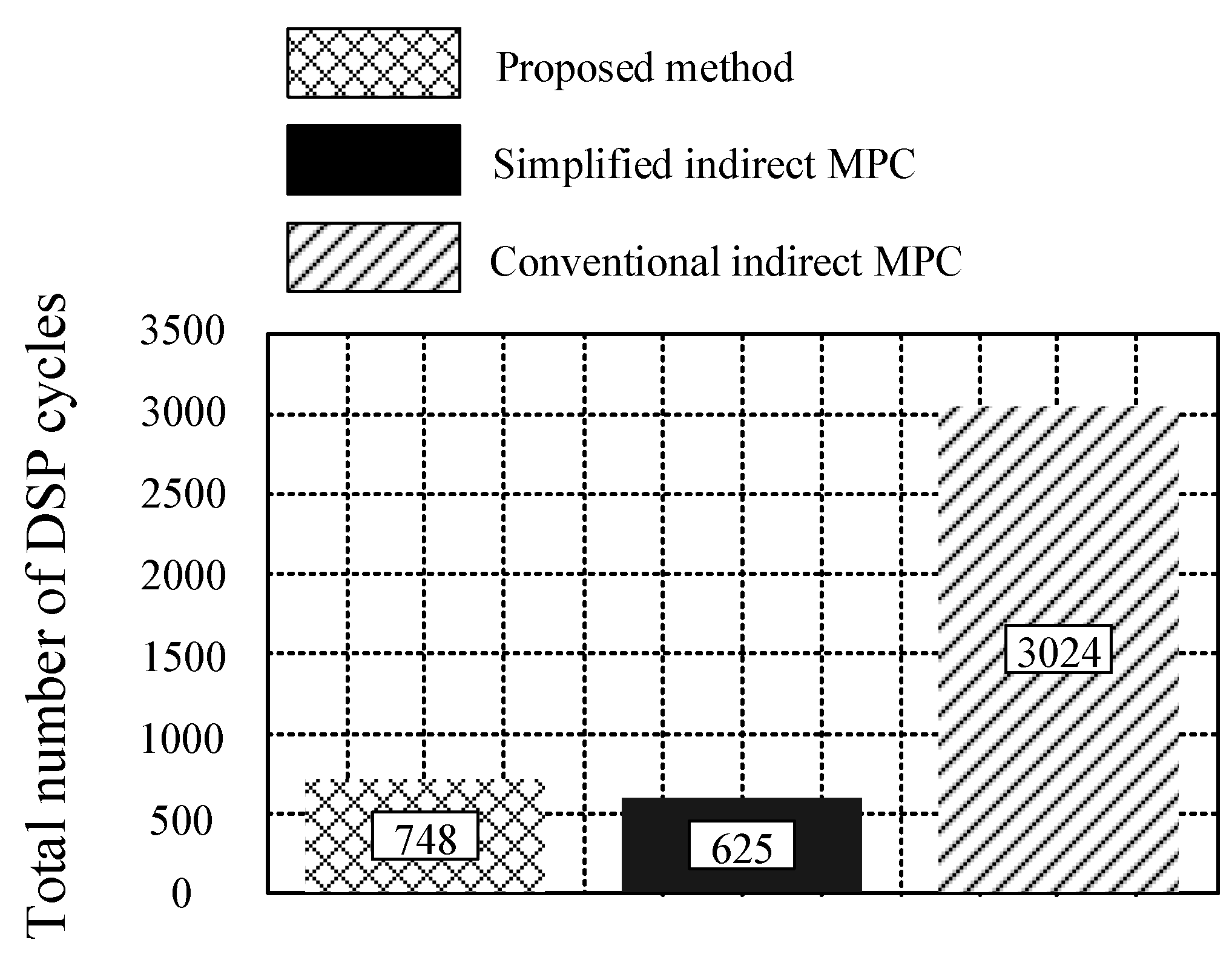
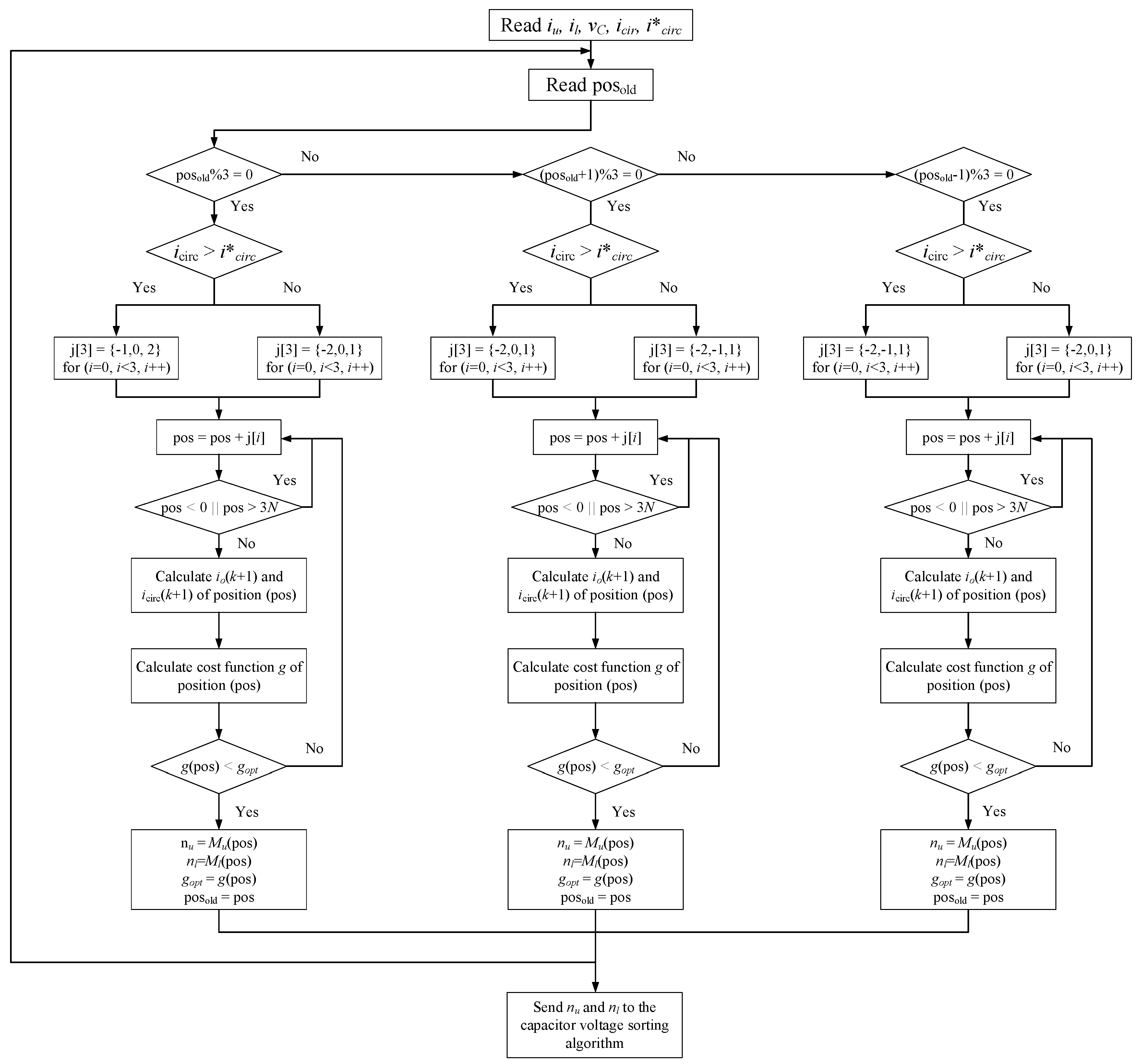
3.1. Reduction of Calculation Burden
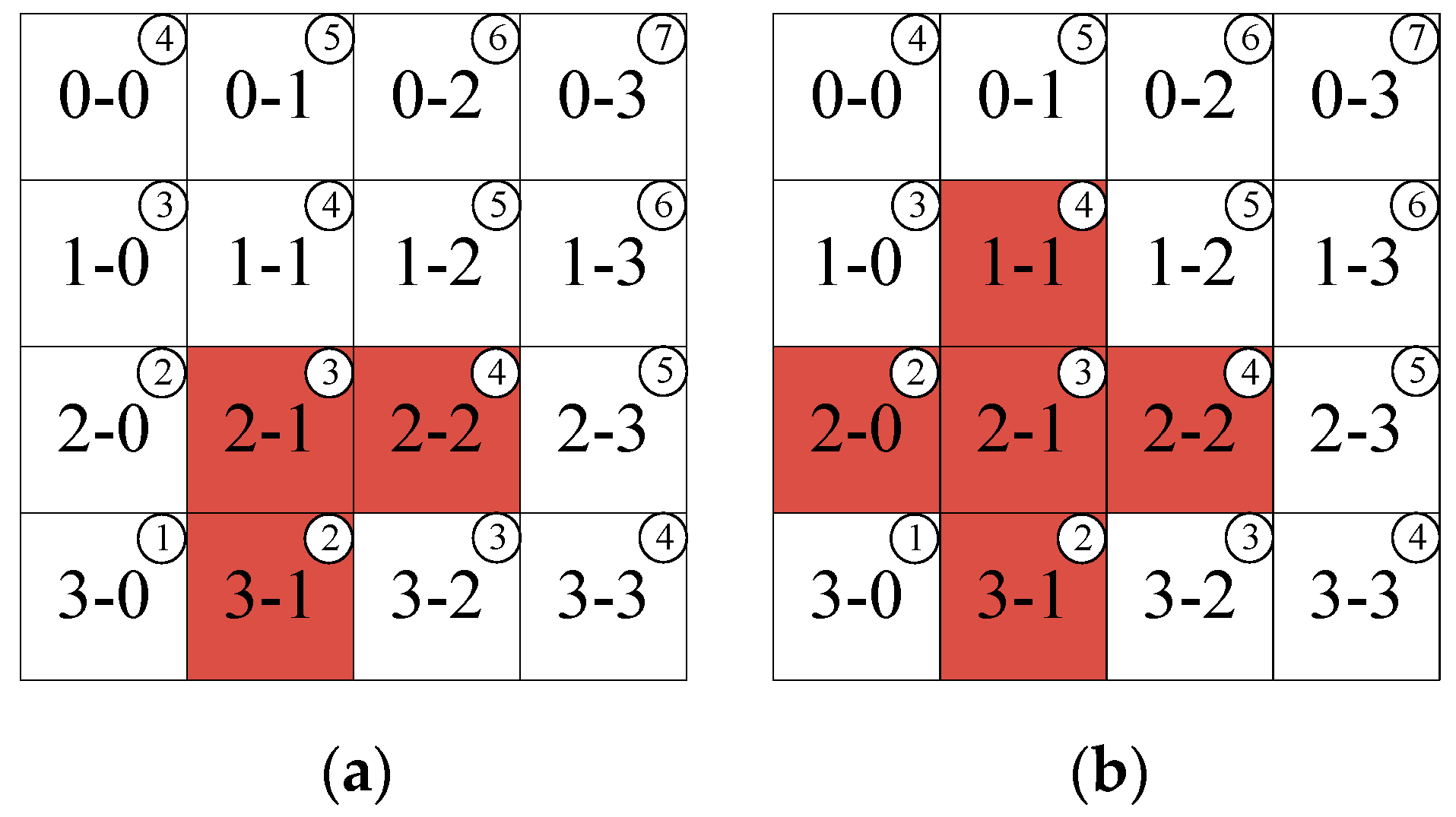
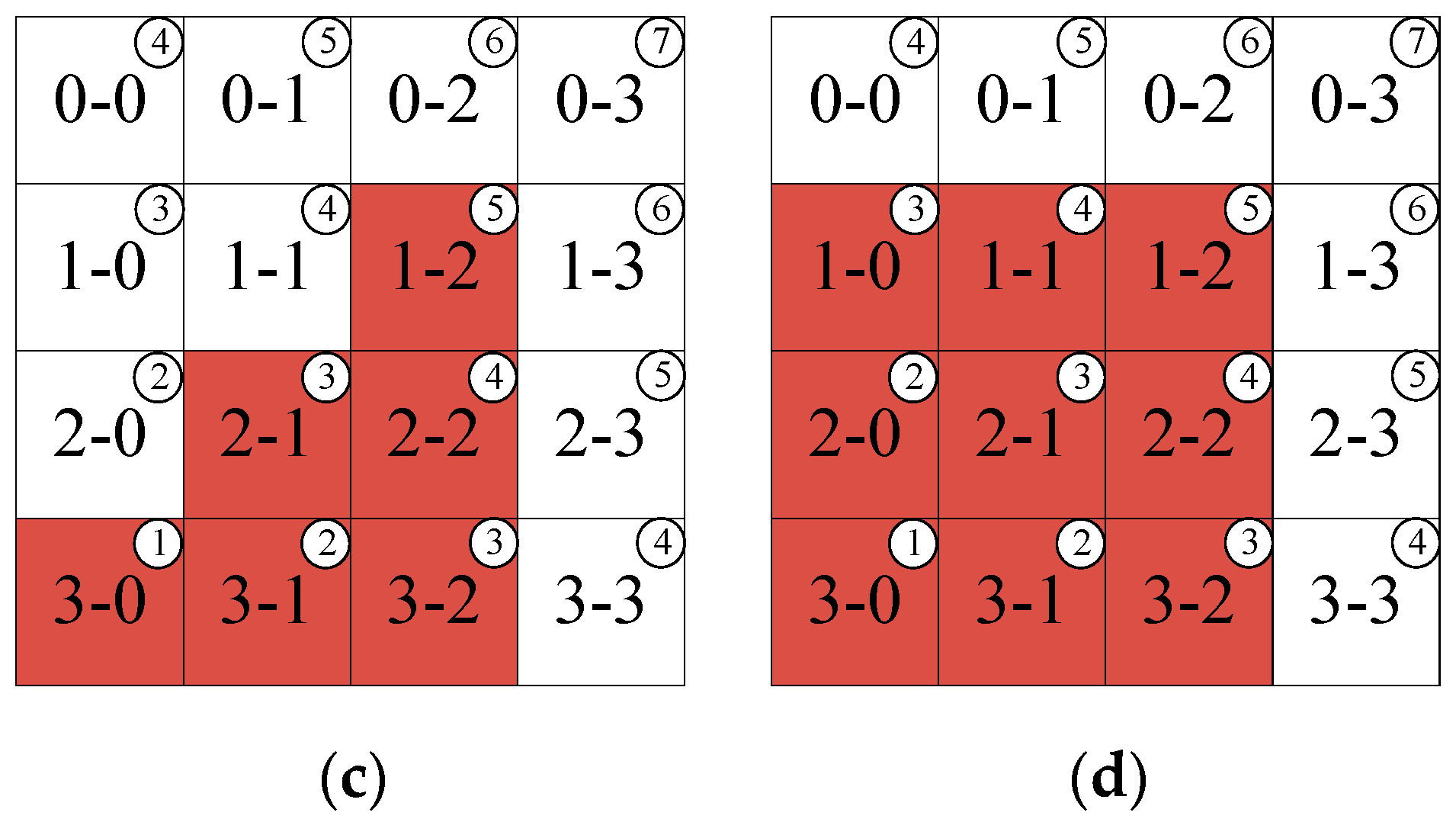
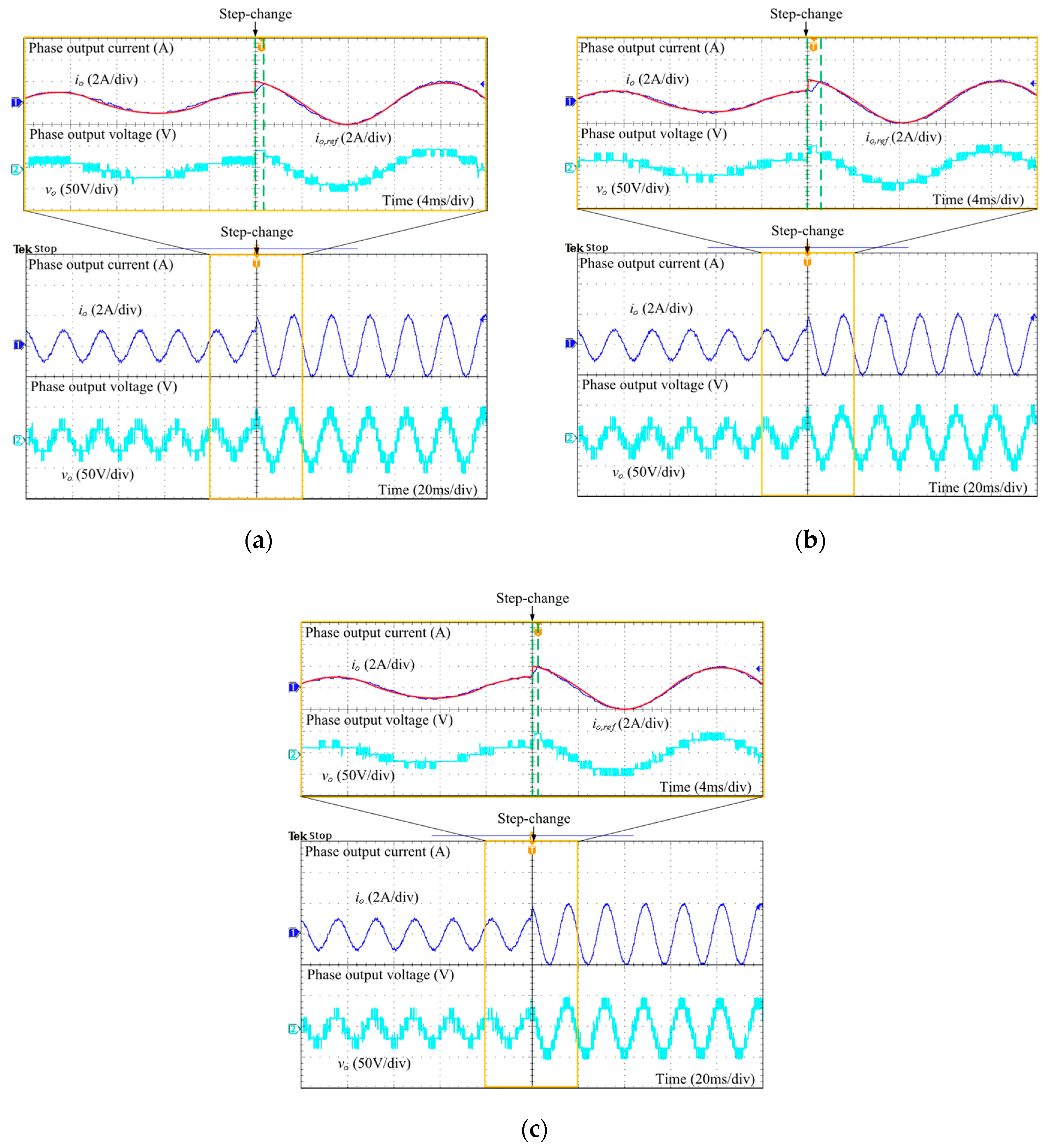
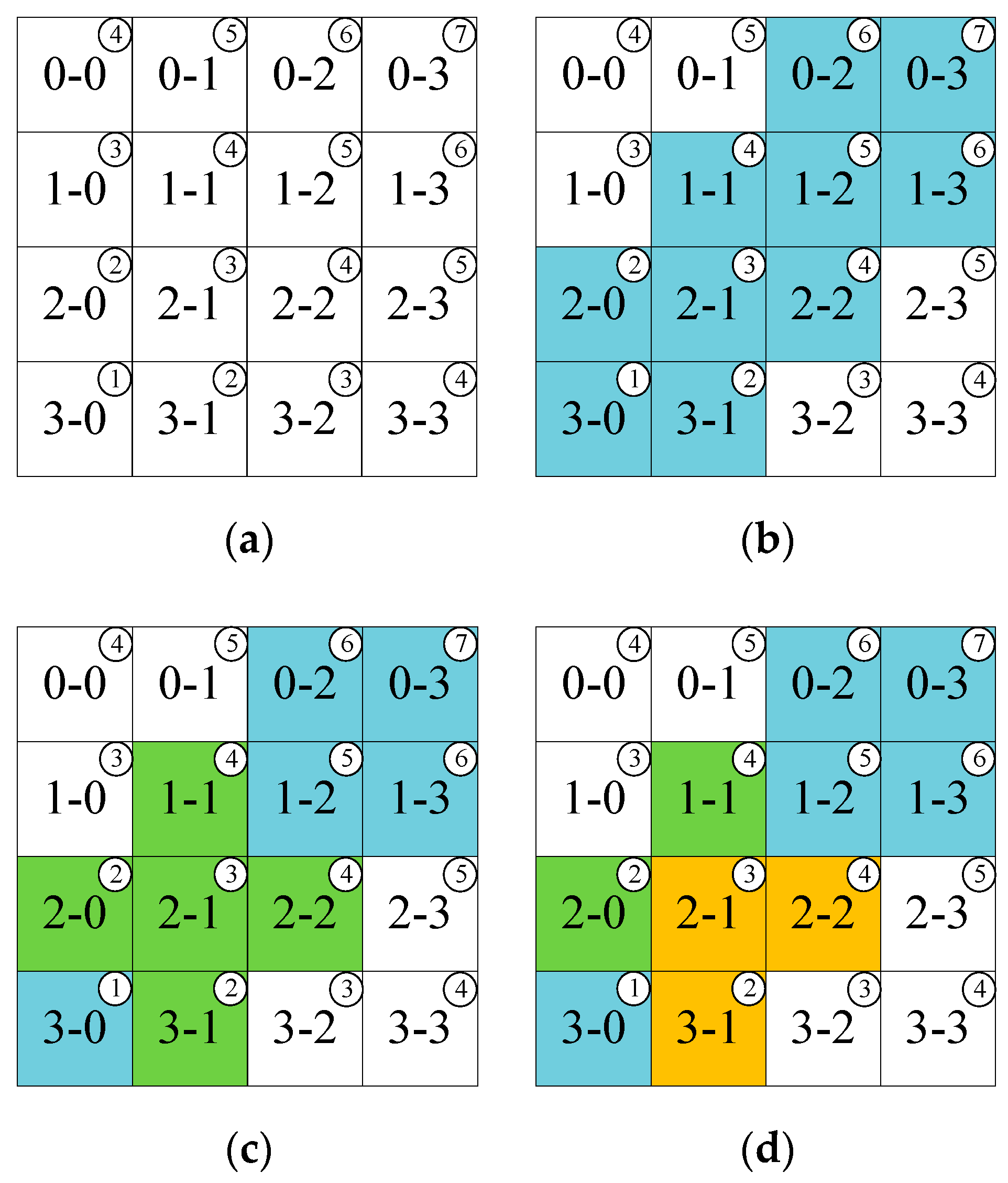
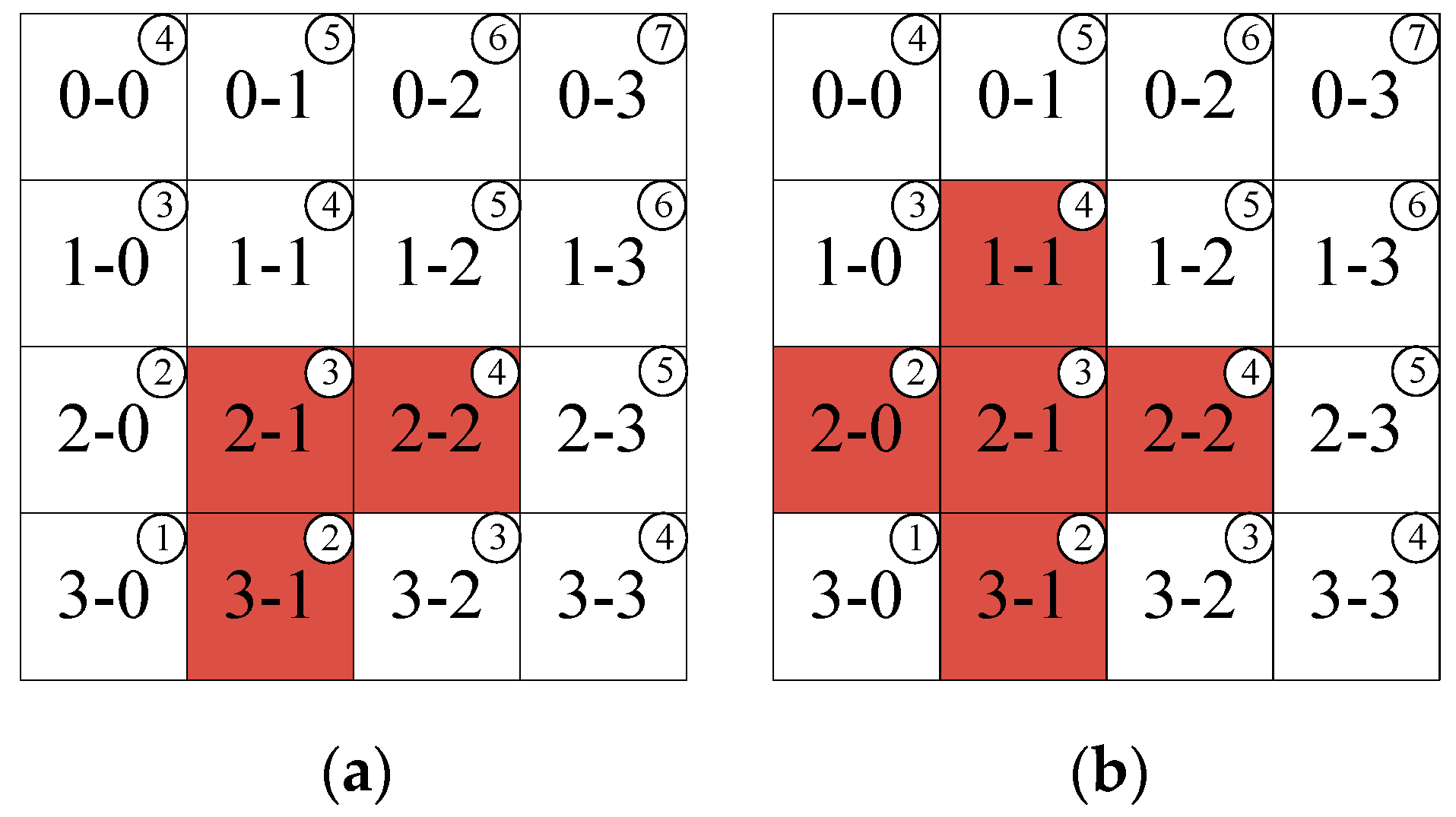
3.2. Improved Dynamic Performance Approach
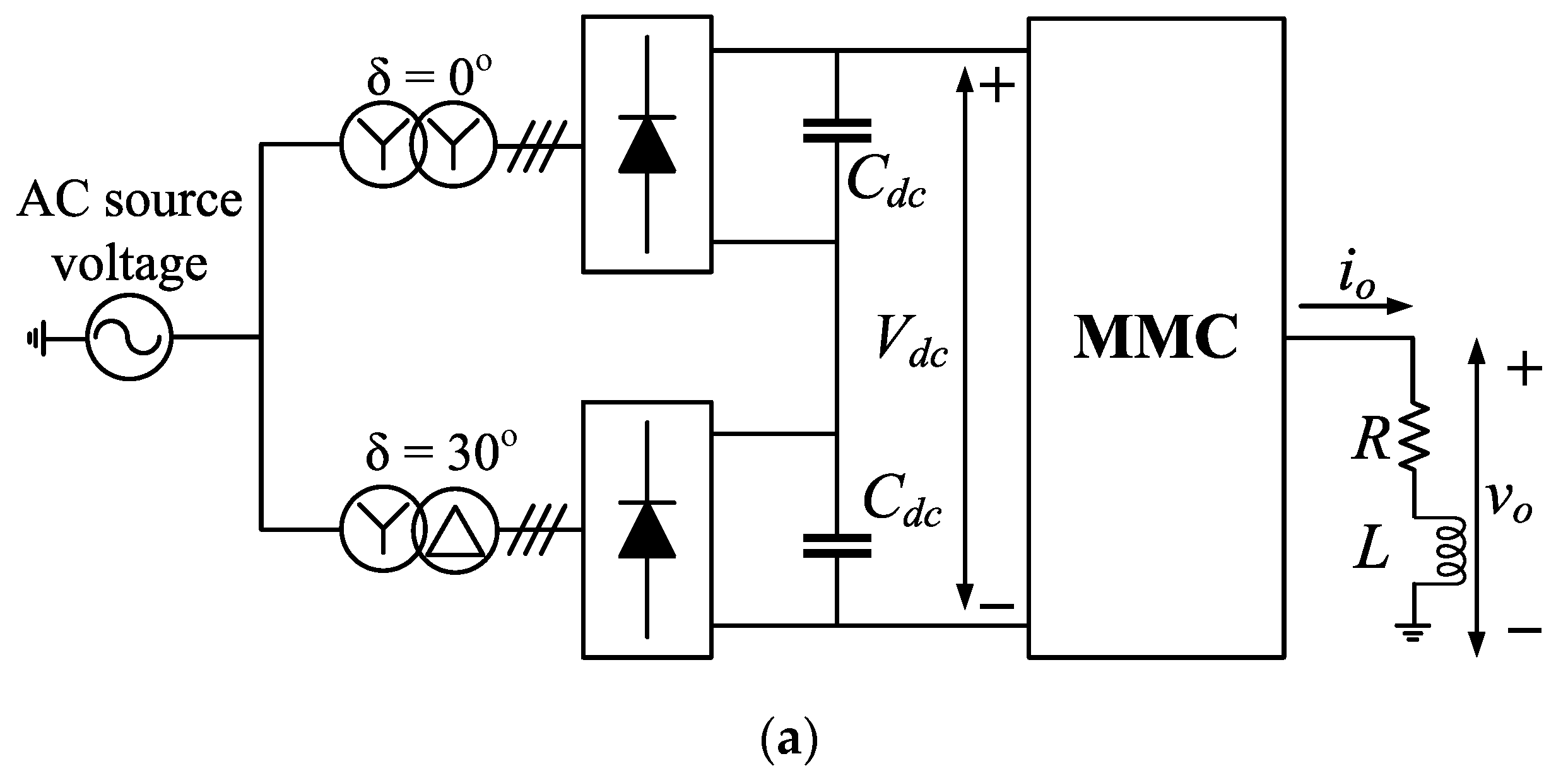
4. Experimental Setup and Results
4.1. Experimental Setup
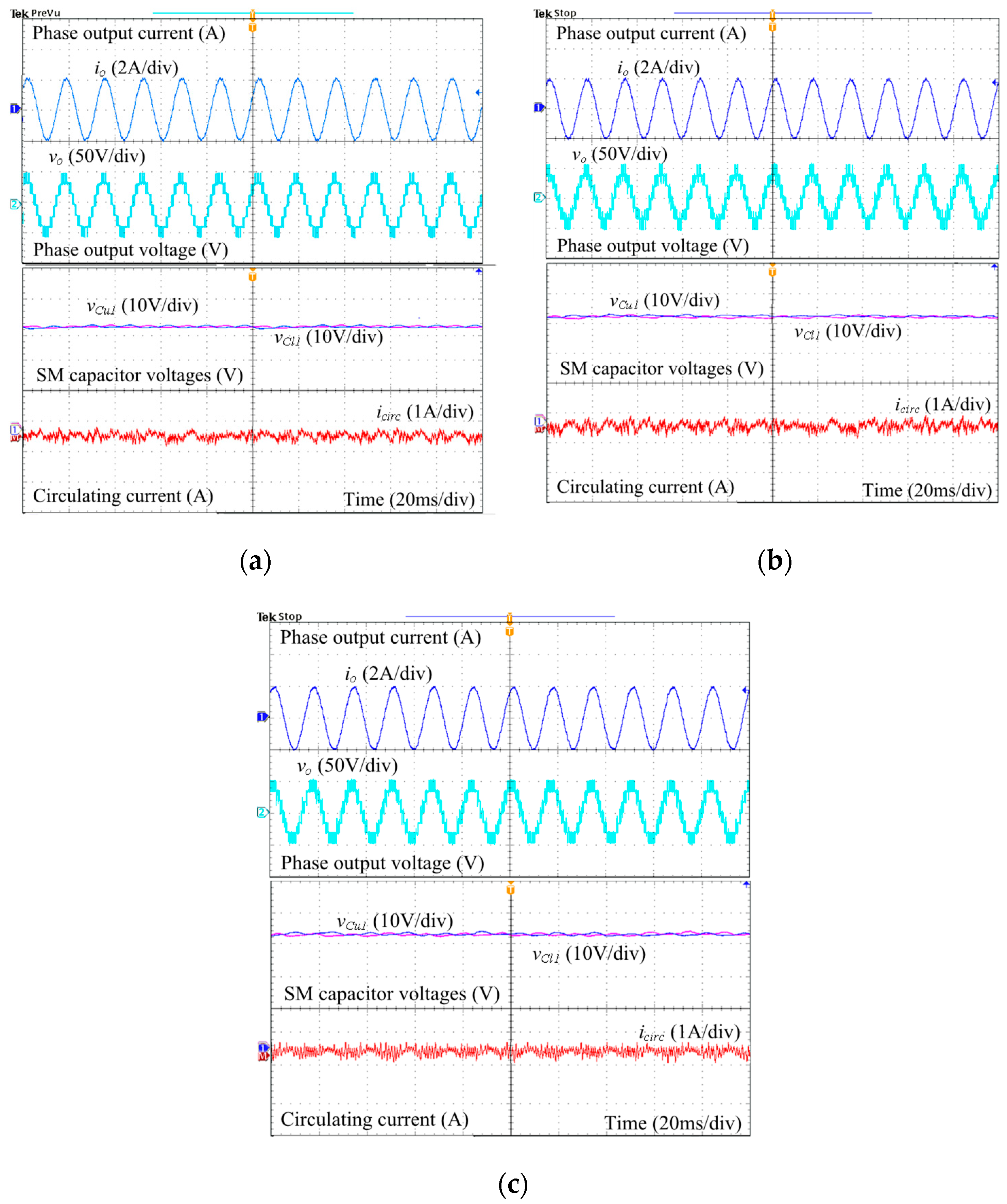
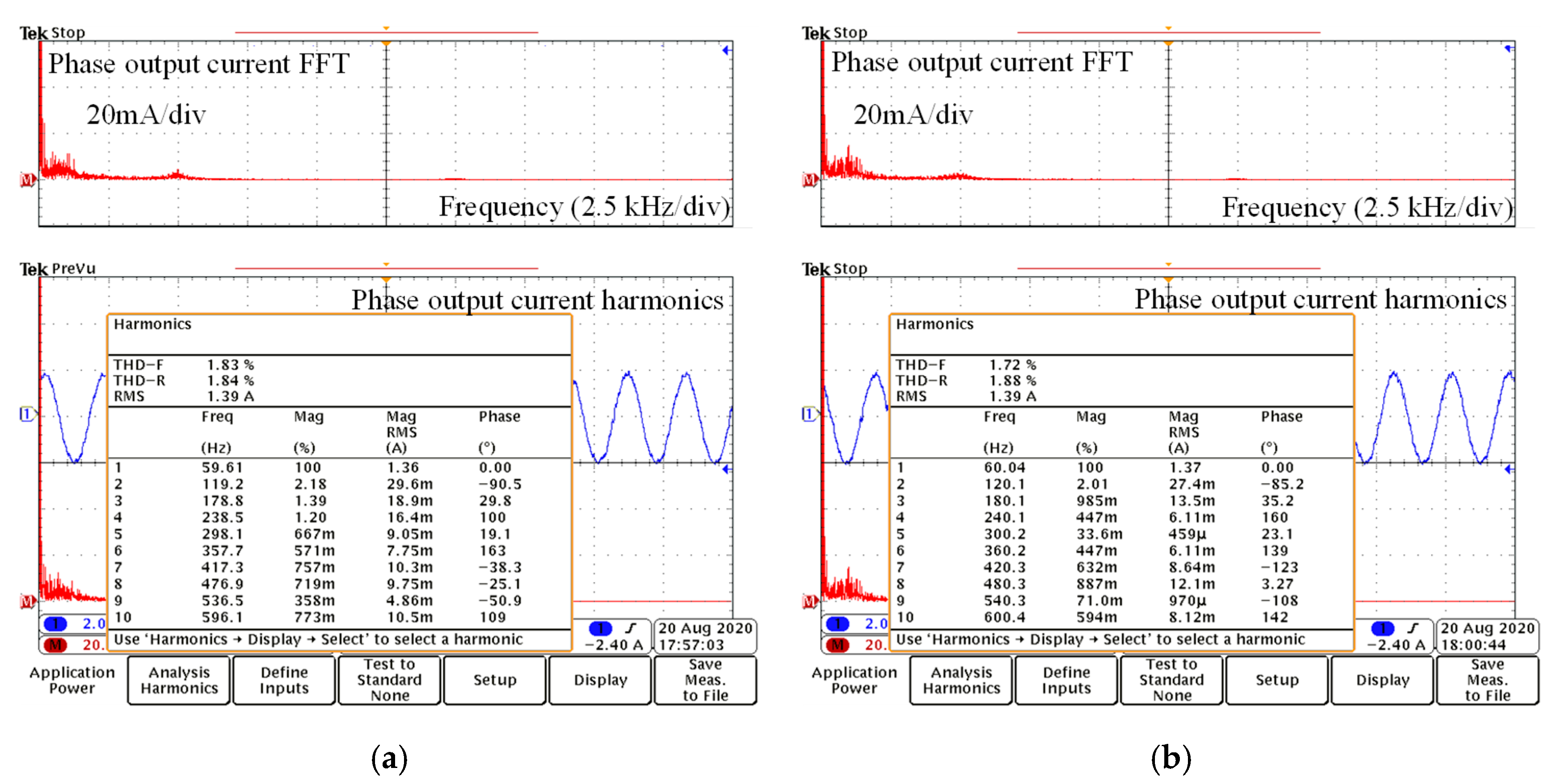
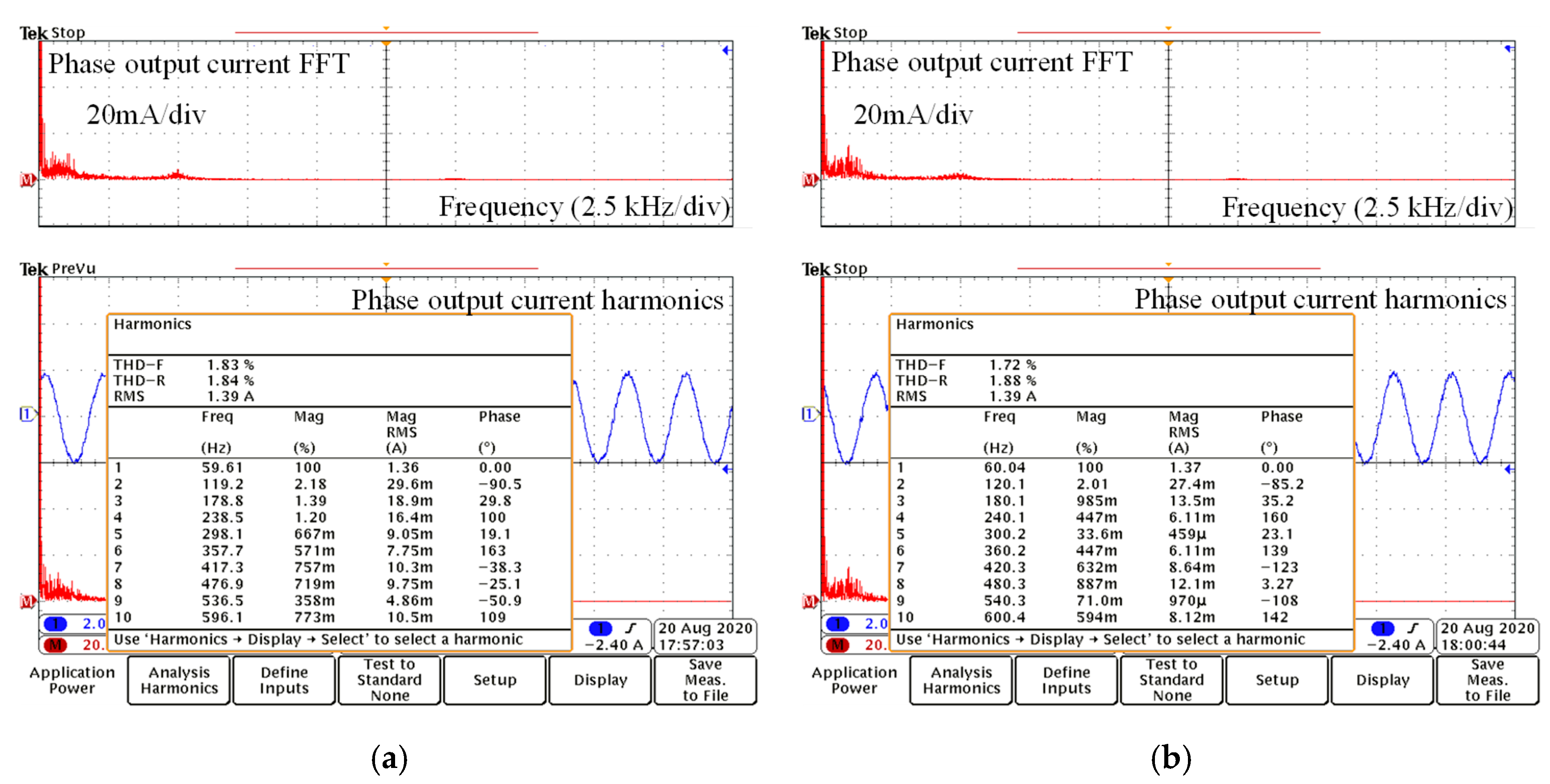
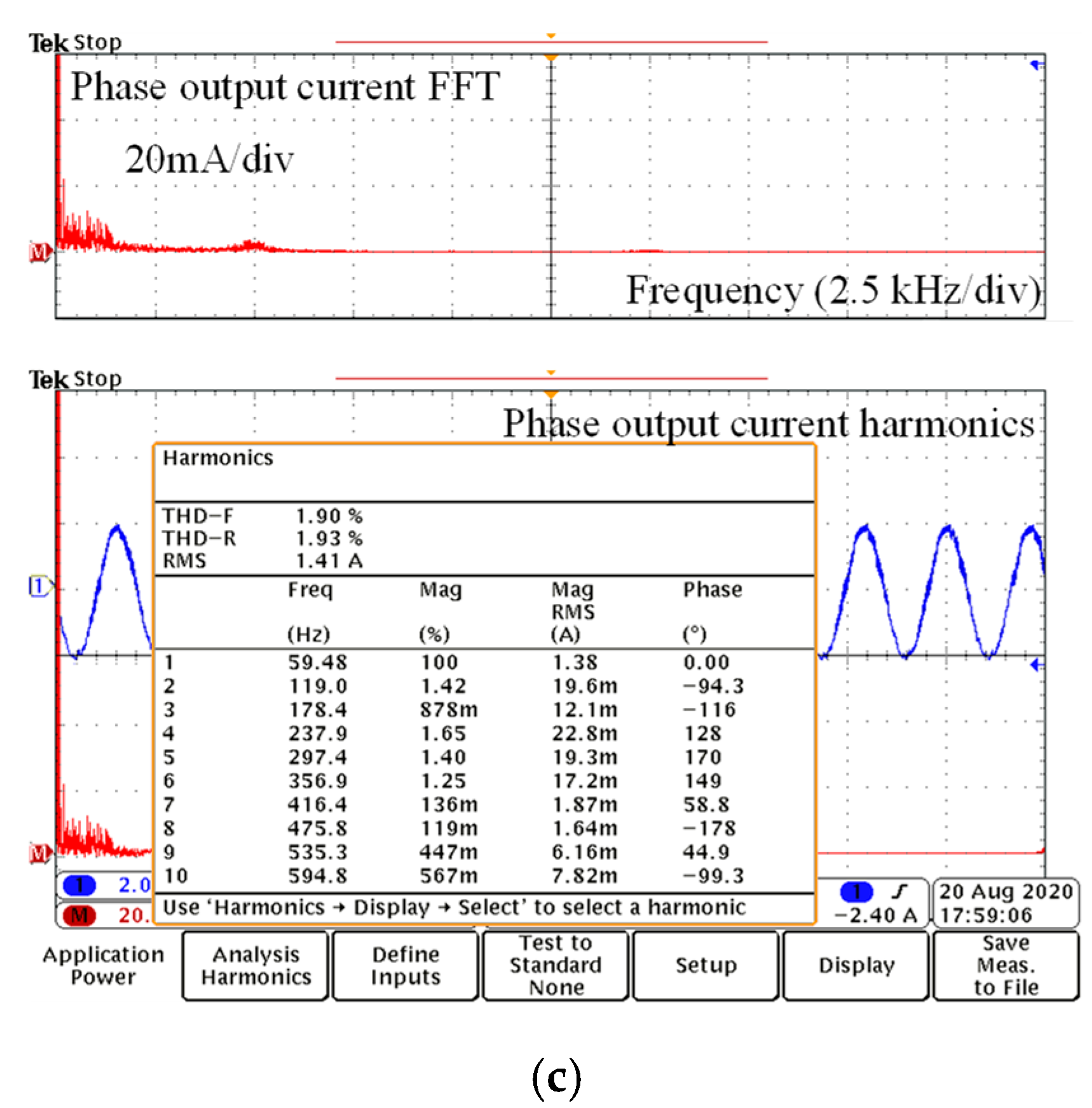
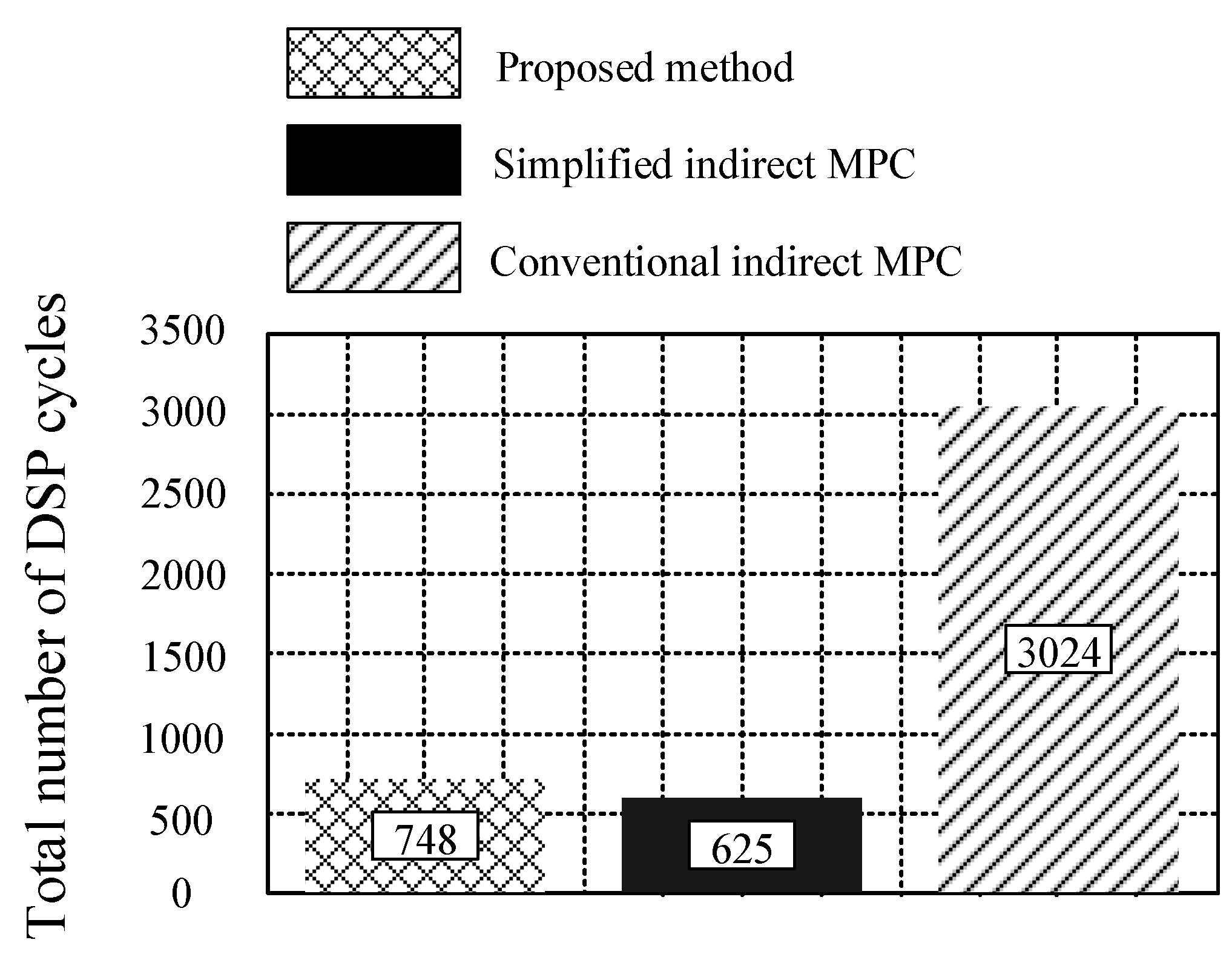
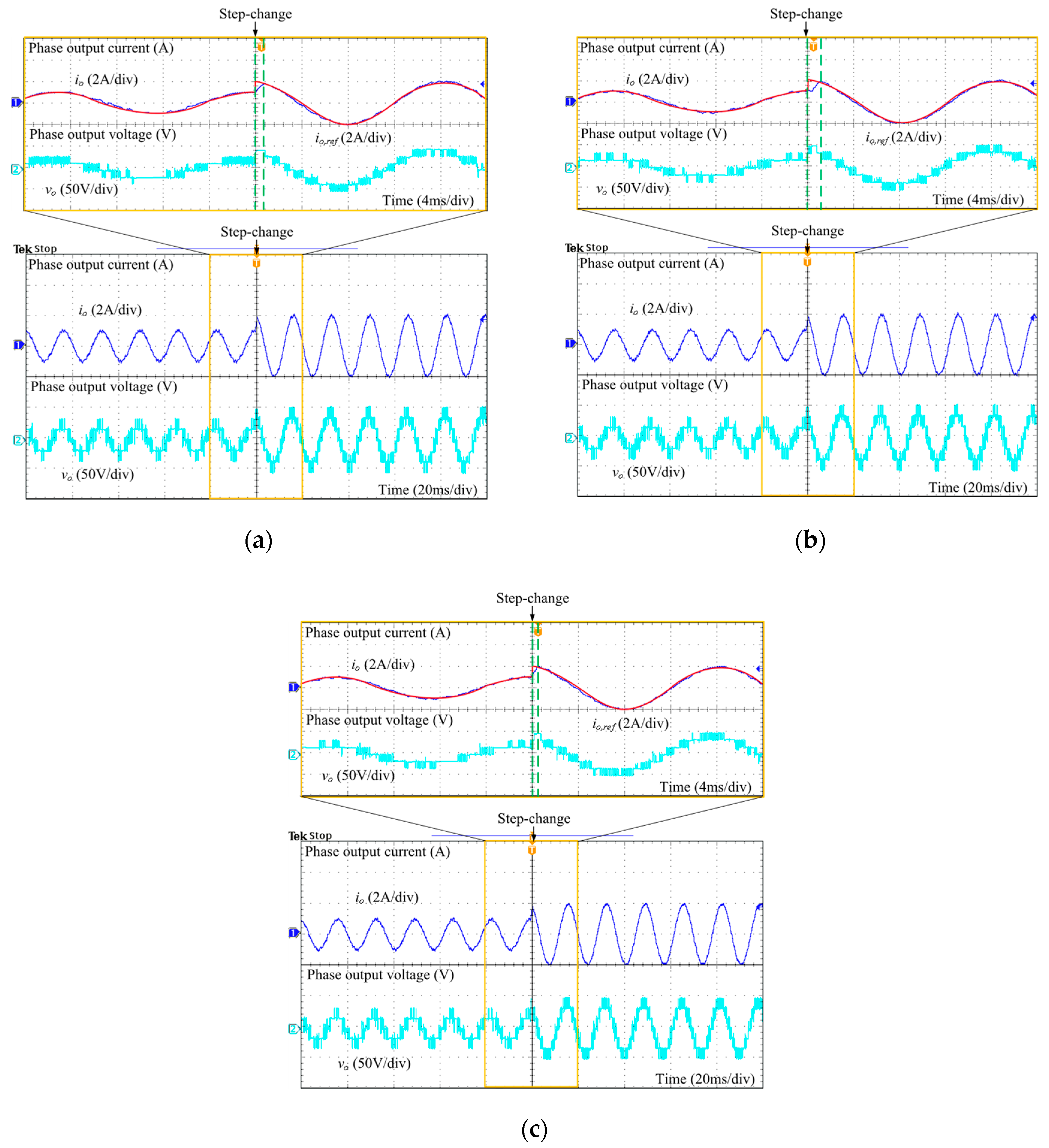
4.2. Experimental Results
5. Conclusions
- (1)
- In this paper, the proposed approach has just been used in a low number of SM MMC. It is significantly demanded to make a test by applying the proposed method to the MMC systems having a considerably large number of SMs.
- (2)
- In addition to the simple load in the implemented experiment, applying the proposed approach to a practical load, like motor drive, should be further investigated.
Author Contributions
Funding
Conflicts of Interest
References
- Akagi, H. Classification, Terminology, and Application of the Modular Multilevel Cascade Converter (MMCC). IEEE Trans. Power Electron. 2011, 26, 3119–3130. [Google Scholar] [CrossRef]
- Debnath, S.; Qin, J.; Bahrani, B.; Saeedifard, M.; Barbosa, P. Operation, Control, and Applications of the Modular Multilevel Converter: A Review. IEEE Trans. Power Electron. 2015, 30, 37–53. [Google Scholar] [CrossRef]
- Dekka, A.; Wu, B.; Fuentes, R.L.; Perez, M.; Zargari, N.R. Evolution of Topologies, Modeling, Control Schemes, and Applications of Modular Multilevel Converters. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 1631–1656. [Google Scholar] [CrossRef]
- Hagiwara, M.; Akagi, H. Control and Experiment of Pulsewidth-Modulated Modular Multilevel Converters. IEEE Trans. Power Electron. 2009, 24, 1737–1746. [Google Scholar] [CrossRef]
- Vasiladiotis, M.; Cherix, N.; Rufer, A. Accurate Capacitor Voltage Ripple Estimation and Current Control Considerations for Grid-Connected Modular Multilevel Converters. IEEE Trans. Power Electron. 2014, 29, 4568–4579. [Google Scholar] [CrossRef]
- Li, B.; Yang, R.; Xu, D.; Wang, G.; Wang, W.; Xu, D. Analysis of the Phase-Shifted Carrier Modulation for Modular Multilevel Converters. IEEE Trans. Power Electron. 2015, 30, 297–310. [Google Scholar] [CrossRef]
- Deng, F.; Chen, Z. Voltage-Balancing Method for Modular Multilevel Converters under Phase-Shifted Carrier-Based Pulsewidth Modulation. IEEE Trans. Ind. Electron. 2015, 62, 4158–4169. [Google Scholar] [CrossRef]
- Darus, R.; Pou, J.; Konstantinou, G.; Ceballos, S.; Agelidis, V.G. Circulating current control and evaluation of carrier dispositions in modular multilevel converters. In Proceedings of the 2013 IEEE ECCE Asia Downunder, Melbourne, Australia, 3–6 June 2013; pp. 332–338. [Google Scholar]
- Mei, J.; Shen, K.; Xiao, B.; Tolbert, L.M.; Zheng, J. A New Selective Loop Bias Mapping Phase Disposition PWM with Dynamic Voltage Balance Capability for Modular Multilevel Converter. IEEE Trans. Ind. Electron. 2014, 61, 798–807. [Google Scholar] [CrossRef]
- Bocker, J.; Freudenberg, B.; The, A.; Dieckerhoff, S. Experimental Comparison of Model Predictive Control and Cascaded Control of the Modular Multilevel Converter. IEEE Trans. Power Electron. 2015, 30, 422–430. [Google Scholar] [CrossRef]
- Kouro, S.; Cortes, P.; Vargas, R.; Ammann, U.; Rodriguez, J. Model Predictive Control—A Simple and Powerful Method to Control Power Converters. IEEE Trans. Ind. Electron. 2009, 56, 1826–1838. [Google Scholar] [CrossRef]
- Perez, M.A.; Rodriguez, J.; Fuentes, E.J.; Kammerer, F. Predictive Control of AC–AC Modular Multilevel Converters. IEEE Trans. Ind. Electron. 2012, 59, 2832–2839. [Google Scholar] [CrossRef]
- Liu, X.; Wang, D.; Peng, Z. An improved finite control-set model predictive control for nested neutral point-clamped converters under both balanced and unbalanced grid conditions. Int. J. Electr. Power Energy Syst. 2019, 104, 910–923. [Google Scholar] [CrossRef]
- Lee, S.S.; Heng, Y.E. A tuning-less model predictive control for modular multilevel converter capable of unbalanced grid fault. Int. J. Electr. Power Energy Syst. 2018, 94, 213–224. [Google Scholar] [CrossRef]
- Li, M.; Wu, X.; Huang, S.; Liang, G. Model predictive direct power control using optimal section selection for PWM rectifier with reduced calculation burden. Int. J. Electr. Power Energy Syst. 2020, 116, 105552. [Google Scholar] [CrossRef]
- Vatani, M.; Bahrani, B.; Saeedifard, M.; Hovd, M. Indirect Finite Control Set Model Predictive Control of Modular Multilevel Converters. IEEE Trans. Smart Grid 2015, 6, 1520–1529. [Google Scholar] [CrossRef] [Green Version]
- Moon, J.-W.; Gwon, J.-S.; Park, J.-W.; Kang, D.-W.; Kim, J.-M. Model Predictive Control with a Reduced Number of Considered States in a Modular Multilevel Converter for HVDC System. IEEE Trans. Power Deliv. 2015, 30, 608–617. [Google Scholar] [CrossRef]
- Zhang, F.; Li, W.; Joos, G. A Voltage Level Based Model Predictive Control of Modular Multilevel Converter. IEEE Trans. Ind. Electron. 2016, 63, 5301–5312. [Google Scholar] [CrossRef]
- Gong, Z.; Dai, P.; Yuan, X.; Wu, X.; Guo, G. Design and Experimental Evaluation of Fast Model Predictive Control for Modular Multilevel Converters. IEEE Trans. Ind. Electron. 2016, 63, 3845–3856. [Google Scholar] [CrossRef]
- Gutierrez, B.; Kwak, S.-S. Modular Multilevel Converters (MMCs) Controlled by Model Predictive Control with Reduced Calculation Burden. IEEE Trans. Power Electron. 2018, 33, 9176–9187. [Google Scholar] [CrossRef]
- Nguyen, M.H.; Kwak, S. Simplified Indirect Model Predictive Control Method for a Modular Multilevel Converter. IEEE Access 2018, 6, 62405–62418. [Google Scholar] [CrossRef]
- Ramirez, D.; Zarei, M.E.; Gupta, M.; Serrano, J. Fast Model-based Predictive Control (FMPC) for grid connected Modular Multilevel Converters (MMC). Int. J. Electr. Power Energy Syst. 2020, 119, 105951. [Google Scholar] [CrossRef]
- Roh, C.; Kwak, S.-S. Improved Finite-Control-Set Model Predictive Control for Cascaded H-Bridge Inverters. Energies 2018, 11, 355. [Google Scholar]
- Harnefors, L.; Antonopoulos, A.; Norrga, S.; Angquist, L.; Nee, H.-P. Dynamic Analysis of Modular Multilevel Converters. IEEE Trans. Ind. Electron. 2013, 60, 2526–2537. [Google Scholar] [CrossRef]
- Konstantinou, G.S.; Ciobotaru, M.; Agelidis, V.G. Analysis of multi-carrier PWM methods for back-to-back HVDC systems based on modular multilevel converters. In Proceedings of the IECON 2011-37th Annual Conference of the IEEE Industrial Electronics Society, Melbourne, Australia, 7–10 November 2011; pp. 4391–4396. [Google Scholar]
- Konstantinou, G.; Pou, J.; Ceballos, S.; Picas, R.; Zaragoza, J.; Agelidis, V.G. Control of Circulating Currents in Modular Multilevel Converters Through Redundant Voltage Levels. IEEE Trans. Power Electron. 2016, 31, 7761–7769. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Idea to Reduce Computational Burden | Requirements | Capability of Controlling Circulating Current | Reduction of Computational Burden |
|---|---|---|---|---|
| Conventional indirect MPC [16] | Decouple the voltage balancing task from the cost function | No strict requirements | Good | Still high |
| Voltage-level-based MPC [18] | Tolerance band around average capacitor voltage | Considering the tolerance band value | Good | Good |
| FMPC [19] | Considering neighboring output voltage level | Exact look-up table | Not mentioned | No discussion |
| Preselection MPC [20] | Considering neighboring output voltage level | Considering the circulating current controllability with large number of SMs | Good | Good |
| Simplified indirect MPC [21] | Considering neighboring output voltage level and circulating current condition | Considering the circulating current controllability with large number of SMs | Good | Good |
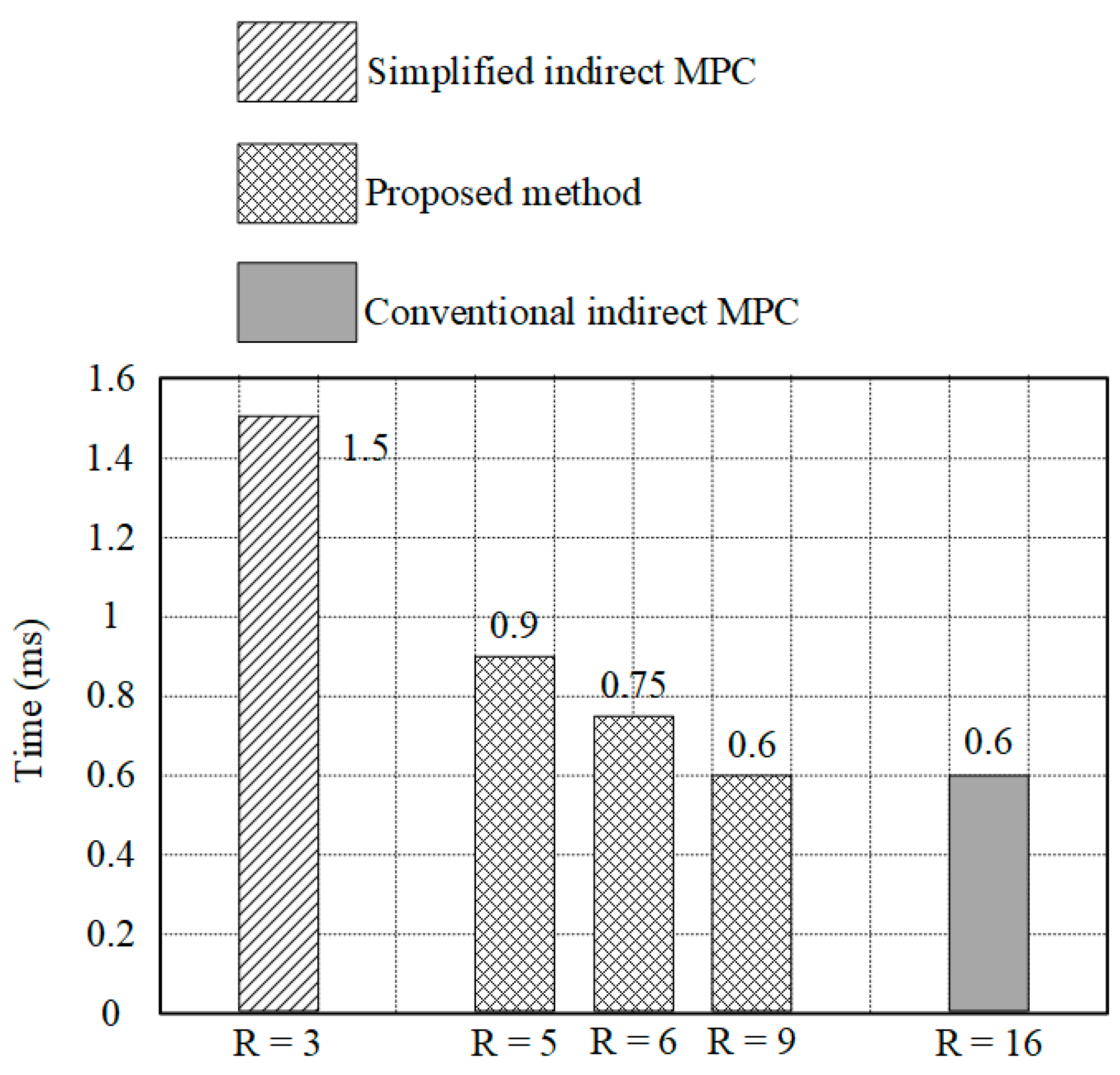
| No. of SMs N = 3 | Steady-State | Transient State | |
|---|---|---|---|
| No. of control action | Direct MPC [10] | 64 | 64 |
| Indirect MPC [16] | 16 | 16 | |
| Simplified indirect MPC [21] | 3 | 3 | |
| Proposed method | 3 | 5,6 or 9 | |
| DC-link voltage Vdc(V) | 100 |
| Number of SMs per arm N | 3 |
| Nominal voltage VC (V) | 33.33 |
| SM capacitance C (mF) | 2.2 |
| Arm inductance La (mH) | 3 |
| Load inductance L (mH) | 10 |
| Load resistance R (Ω) | 20 |
| Output frequency fo (Hz) | 60 |
| Sampling frequency fsp(kHz) | 10 |
| Rated MMC kVA S (kVA) | 0.1 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, M.H.; Kwak, S. Improved Indirect Model Predictive Control for Enhancing Dynamic Performance of Modular Multilevel Converter. Electronics 2020, 9, 1405. https://doi.org/10.3390/electronics9091405
Nguyen MH, Kwak S. Improved Indirect Model Predictive Control for Enhancing Dynamic Performance of Modular Multilevel Converter. Electronics. 2020; 9(9):1405. https://doi.org/10.3390/electronics9091405
Chicago/Turabian StyleNguyen, Minh Hoang, and Sangshin Kwak. 2020. "Improved Indirect Model Predictive Control for Enhancing Dynamic Performance of Modular Multilevel Converter" Electronics 9, no. 9: 1405. https://doi.org/10.3390/electronics9091405
APA StyleNguyen, M. H., & Kwak, S. (2020). Improved Indirect Model Predictive Control for Enhancing Dynamic Performance of Modular Multilevel Converter. Electronics, 9(9), 1405. https://doi.org/10.3390/electronics9091405