UAV Autonomous Aerial Combat Maneuver Strategy Generation with Observation Error Based on State-Adversarial Deep Deterministic Policy Gradient and Inverse Reinforcement Learning

Abstract
1. Introduction
2. Aerial Combat Modeling
2.1. State-Adversarial Markov Decision Process (SA-MDP)
2.2. System Modeling
2.2.1. State Transitions
2.2.2. State Definition
2.2.3. Action Definition
2.2.4. Reward Function and Terminal Condition
3. Autonomous Aerial Combat Maneuver Strategy Generation of UAV within Visual Range Based on SA-DDPG
3.1. Deep Deterministic Policy Gradient (DDPG)
3.2. State-Adversarial Deep Deterministic Policy Gradient (SA-DDPG)
| Algorithm 1 State-Adversarial Deep Deterministic Policy Gradient (SA-DDPG). |
|
3.3. Interval Bound Propagation of Neural Network
3.4. Maueuvering Strategy Generation Algorithm OutLine
4. Reward Shaping Using Inverse Reinforcement Learning
4.1. Reward Shaping
4.2. Nonparameterized Features of Aerial Combat
4.3. Shaping Reward Modeling Using Maximum Entropy Inverse Reinforcement Learning
| Algorithm 2 Approximate expected empirical feature count. |
|
5. Simulation and Analysis
5.1. Platform Setting
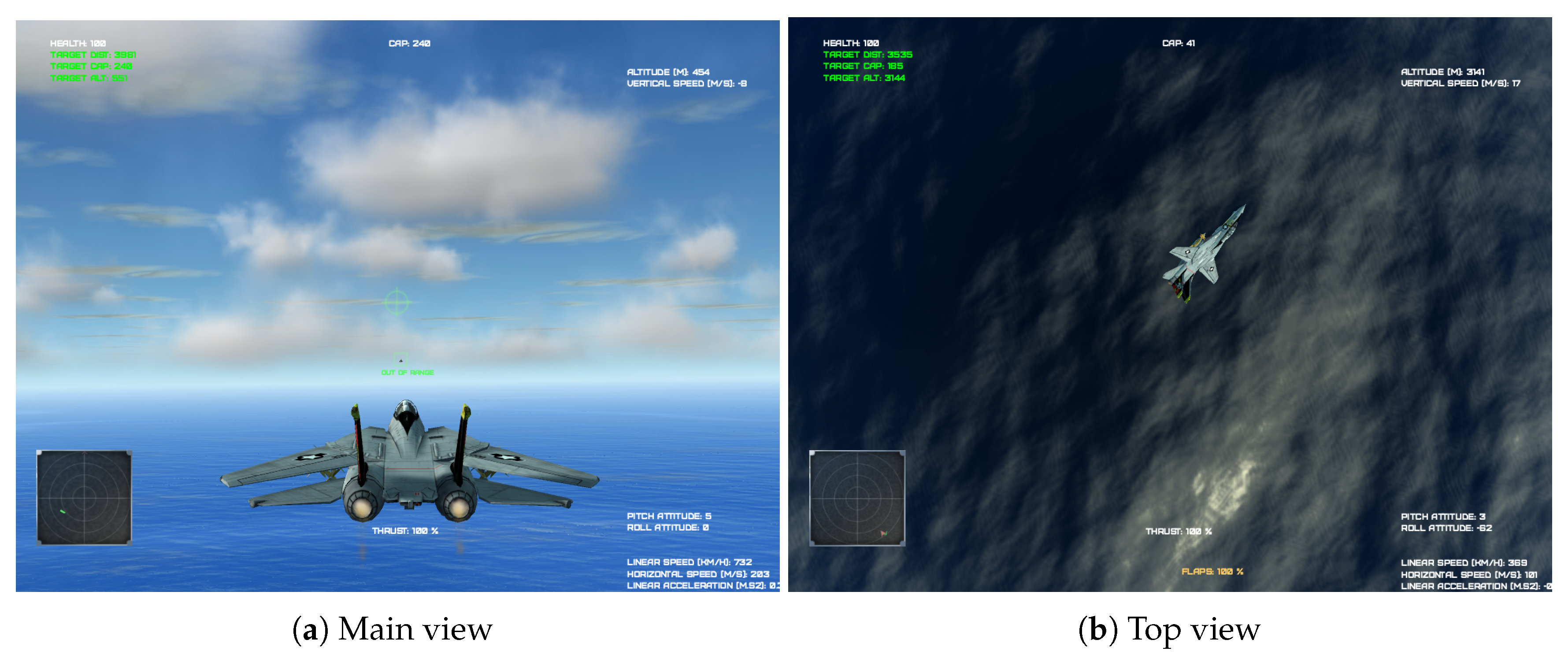
5.1.1. Aerial Combat Simulation Platform Construction
5.1.2. Initial Setting for 1-vs-1 WVR Aerial Combat Engagement
5.1.3. Aircraft Performance Parameters Setting
5.1.4. Evaluation Metrics of Aerial Combat Strategy
5.1.5. Opponent Maueuvering Strategy
5.2. Shaping Reward Experiment
5.2.1. Experiment Settings
5.2.2. Experiment Result and Analysis
5.3. Performance of Training Process
5.3.1. Experiment Settings
5.3.2. Experiment Result and Analysis
5.4. Testing Aerial Combat Maneuver Strategy
5.4.1. Experiment Settings
5.4.2. Experiment Result and Analysis
5.5. Robustness Evaluation of the Aerial Combat Maneuver Strategy
5.5.1. Experiment Settings
5.5.2. Experiment Result and Analysis
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Skjervold, E. Autonomous, Cooperative UAV Operations using COTS Consumer Drones and Custom Ground Control Station. In Proceedings of the MILCOM 2018—2018 IEEE Military Communications Conference (MILCOM), Los Angeles, CA, USA, 29–31 October 2018; pp. 1–6. [Google Scholar]
- Gupta, S.G.; Ghonge, D.; Jawandhiya, P.M. Review of unmanned aircraft system (UAS). Int. J. Adv. Res. Comput. Eng. Technol. (IJARCET) Vol. 2013, 2, 1646–1658. [Google Scholar] [CrossRef]
- Hebert, A.J. Fighter generations. Air Force Mag. 2008, 91, 1. [Google Scholar]
- Ardema, M.; Rajan, N. An Approach to Three-dimensional Aircraft Pursuit–evasion. In Pursuit-Evasion Differential Games; Elsevier: Amsterdam, The Netherlands, 1987; pp. 97–110. [Google Scholar]
- Park, H.; Lee, B.Y.; Tahk, M.J.; Yoo, D.W. Differential game based air combat maneuver generation using scoring function matrix. Int. J. Aeronaut. Space Sci. 2016, 17, 204–213. [Google Scholar] [CrossRef]
- Jarmark, B.; Hillberg, C. Pursuit-evasion between two realistic aircraft. J. Guid. Control Dyn. 1984, 7, 690–694. [Google Scholar] [CrossRef]
- Greenwood, N. A differential game in three dimensions: The aerial dogfight scenario. Dyn. Control 1992, 2, 161–200. [Google Scholar] [CrossRef]
- McGrew, J.S.; How, J.P.; Williams, B.; Roy, N. Air-combat strategy using approximate dynamic programming. J. Guid. Control Dyn. 2010, 33, 1641–1654. [Google Scholar] [CrossRef]
- Shin, H.; Lee, J.; Kim, H.; Shim, D.H. An autonomous aerial combat framework for two-on-two engagements based on basic fighter maneuvers. Aerosp. Sci. Technol. 2018, 72, 305–315. [Google Scholar] [CrossRef]
- Burgin, G.H.; Owens, A. An Adaptive Maneuvering Logic Computer Program for the Simulation of One-to-One Air-to-Air Combat. Volume 2: Program Description; Technical Report; NASA: Washington, DC, USA, 1975. [Google Scholar]
- Chappell, A.R. Knowledge-based Reasoning in the Paladin Tactical Decision Generation System. In Proceedings of the IEEE/AIAA 11th Digital Avionics Systems Conference, Seattle, WA, USA, 5–8 October 1992; pp. 155–160. [Google Scholar]
- Chappell, A.; Mcmanus, J.; Goodrich, K. Trial Maneuver Generation and Selection in the PALADIN Tactical Decision Generation System. In Proceedings of the Astrodynamics Conference, Hilton Head, SC, USA, 10–12 August 1992; p. 4541. [Google Scholar]
- Virtanen, K.; Raivio, T.; Hämäläinen, R.P. An Influence Diagram Approach to One-on-one Air Combat. In Proceedings of the 10th International Symposium on Differential Games and Applications, St. Petersburg, Russia, 8–11 July 2002; Volume 2, pp. 859–864. [Google Scholar]
- Virtanen, K.; Karelahti, J.; Raivio, T. Modeling air combat by a moving horizon influence diagram game. J. Guid. Control Dyn. 2006, 29, 1080–1091. [Google Scholar] [CrossRef]
- McMahon, D.C. A Neural Network Trained to Select Aircraft Maneuvers during Air Combat: A Comparison of Network and Rule based Performance. In Proceedings of the 1990 IJCNN International Joint Conference on Neural Networks, San Diego, CA, USA, 17–21 June 1990; pp. 107–112. [Google Scholar]
- Teng, T.H.; Tan, A.H.; Tan, Y.S.; Yeo, A. Self-organizing Neural Networks for Learning Air Combat Maneuvers. In Proceedings of the 2012 International Joint Conference on Neural Networks (IJCNN), Brisbane, Australia, 10–15 June 2012; pp. 1–8. [Google Scholar]
- Bo, L.; Zheng, Q.; Liping, S.; Youbing, G.; Rui, W. Air Combat Decision Making for Coordinated Multiple Target Attack Using Collective Intelligence. Acta Aeronaut. Astronaut. Sin. 2009, 9, E926. [Google Scholar]
- Yang, Z.; Zhou, D.; Piao, H.; Zhang, K.; Kong, W.; Pan, Q. Evasive Maneuver Strategy for UCAV in Beyond-Visual-Range Air Combat Based on Hierarchical Multi-Objective Evolutionary Algorithm. IEEE Access 2020, 8, 46605–46623. [Google Scholar] [CrossRef]
- Yang, Q.; Zhu, Y.; Zhang, J.; Qiao, S.; Liu, J. UAV Air Combat Autonomous Maneuver Decision Based on DDPG Algorithm. In Proceedings of the 2019 IEEE 15th International Conference on Control and Automation (ICCA), Edinburgh, UK, 16–19 July 2019; pp. 37–42. [Google Scholar]
- Zuo, Y.; Deng, K.; Yang, Y.; Huang, T. Flight Attitude Simulator Control System Design based on Model-free Reinforcement Learning Method. In Proceedings of the 2019 IEEE 3rd Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Chongqing, China, 11–13 October 2019; pp. 355–361. [Google Scholar]
- Radac, M.B.; Lala, T. Learning Output Reference Model Tracking for Higher-Order Nonlinear Systems with Unknown Dynamics. Algorithms 2019, 12, 121. [Google Scholar] [CrossRef]
- Qi, H.; Hu, Z.; Huang, H.; Wen, X.; Lu, Z. Energy Efficient 3-D UAV Control for Persistent Communication Service and Fairness: A Deep Reinforcement Learning Approach. IEEE Access 2020, 36, 53172–53184. [Google Scholar] [CrossRef]
- Song, H.; Liu, C.C.; Lawarrée, J.; Dahlgren, R.W. Optimal electricity supply bidding by Markov decision process. IEEE Trans. Power Syst. 2000, 15, 618–624. [Google Scholar] [CrossRef]
- Bernstein, D.S.; Givan, R.; Immerman, N.; Zilberstein, S. The complexity of decentralized control of Markov decision processes. Math. Oper. Res. 2002, 27, 819–840. [Google Scholar] [CrossRef]
- Bellman, R. A Markovian decision process. J. Math. Mech. 1957, 6, 679–684. [Google Scholar] [CrossRef]
- Bellman, R. The Theory of Dynamic Programming. Bull. Amer. Math. Soc. 1954, 60, 503–515. [Google Scholar] [CrossRef]
- Zhang, H.; Chen, H.; Xiao, C.; Li, B.; Boning, D.; Hsieh, C.J. Robust Deep Reinforcement Learning against Adversarial Perturbations on Observations. arXiv 2020, arXiv:2003.08938. [Google Scholar]
- Lillicrap, T.P.; Hunt, J.J.; Pritzel, A.; Heess, N.; Erez, T.; Tassa, Y.; Silver, D.; Wierstra, D. Continuous control with deep reinforcement learning. arXiv 2015, arXiv:1509.02971. [Google Scholar]
- Mnih, V.; Kavukcuoglu, K.; Silver, D.; Graves, A.; Antonoglou, I.; Wierstra, D.; Riedmiller, M. Playing atari with deep reinforcement learning. arXiv 2013, arXiv:1312.5602. [Google Scholar]
- Schaul, T.; Quan, J.; Antonoglou, I.; Silver, D. Prioritized experience replay. arXiv 2015, arXiv:1511.05952. [Google Scholar]
- Gowal, S.; Dvijotham, K.; Stanforth, R.; Bunel, R.; Qin, C.; Uesato, J.; Arandjelovic, R.; Mann, T.; Kohli, P. On the effectiveness of interval bound propagation for training verifiably robust models. arXiv 2018, arXiv:1810.12715. [Google Scholar]
- Laud, A.D. Theory and Application of Reward Shaping in Reinforcement Learning. Technical Report. 2004. Available online: https://www.ideals.illinois.edu/handle/2142/10797 (accessed on 8 July 2020).
- Ng, A.Y.; Russell, S.J. Algorithms for Inverse Reinforcement Learning. In Proceedings of the International Conference on Machine Learning (ICML), Stanford, CA, USA, 29 June–2 July 2000; Volume 1, p. 2. [Google Scholar]
- Ziebart, B.D.; Maas, A.L.; Bagnell, J.A.; Dey, A.K. Maximum Entropy Inverse Reinforcement Learning. In Proceedings of the Association for the Advancement of Artificial Intelligence (AAAI), Chicago, IL, USA, 13–17 July 2008; Volume 8, pp. 1433–1438. [Google Scholar]
- Jaynes, E.T. On the rationale of maximum-entropy methods. Proc. IEEE 1982, 70, 939–952. [Google Scholar] [CrossRef]
- Nichols, R.; Ryan, J.; Mumm, H.; Lonstein, W.; Carter, C.; Hood, J. Africa–World’s First Busiest Drone Operational Proving Ground. In Unmanned Aircraft Systems in the Cyber Domain; New Prairie Press: Manhattan, KS, USA, 2019. [Google Scholar]
- Ramírez López, N.; Żbikowski, R. Effectiveness of autonomous decision making for unmanned combat aerial vehicles in dogfight engagements. J. Guid. Control Dyn. 2018, 41, 1021–1024. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| State | Definition | State | Definition |
|---|---|---|---|
| Nonparameterized Feature | Description |
|---|---|
| The relative distance between blue and red aircrafts | |
| The absolute value of aspect angle | |
| The absolute value of antenna train angle | |
| The relative velocity between blue and red aircrafts |
| Parameter | Advantage Value | Disadvantage Value |
|---|---|---|
| Roll maximum rate (deg/s) | 140 | 110 |
| Maximum thrust (N) | 100,000 | 80,000 |
| Feature | ||||
| Optimal Weight | −0.046 | −0.416 | −0.515 | −0.023 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kong, W.; Zhou, D.; Yang, Z.; Zhao, Y.; Zhang, K. UAV Autonomous Aerial Combat Maneuver Strategy Generation with Observation Error Based on State-Adversarial Deep Deterministic Policy Gradient and Inverse Reinforcement Learning. Electronics 2020, 9, 1121. https://doi.org/10.3390/electronics9071121
Kong W, Zhou D, Yang Z, Zhao Y, Zhang K. UAV Autonomous Aerial Combat Maneuver Strategy Generation with Observation Error Based on State-Adversarial Deep Deterministic Policy Gradient and Inverse Reinforcement Learning. Electronics. 2020; 9(7):1121. https://doi.org/10.3390/electronics9071121
Chicago/Turabian StyleKong, Weiren, Deyun Zhou, Zhen Yang, Yiyang Zhao, and Kai Zhang. 2020. "UAV Autonomous Aerial Combat Maneuver Strategy Generation with Observation Error Based on State-Adversarial Deep Deterministic Policy Gradient and Inverse Reinforcement Learning" Electronics 9, no. 7: 1121. https://doi.org/10.3390/electronics9071121
APA StyleKong, W., Zhou, D., Yang, Z., Zhao, Y., & Zhang, K. (2020). UAV Autonomous Aerial Combat Maneuver Strategy Generation with Observation Error Based on State-Adversarial Deep Deterministic Policy Gradient and Inverse Reinforcement Learning. Electronics, 9(7), 1121. https://doi.org/10.3390/electronics9071121