A Photovoltaic-Based DC Microgrid System: Analysis, Design and Experimental Results

Abstract
1. Introduction
2. PVDCM System
2.1. PVDCM System Description
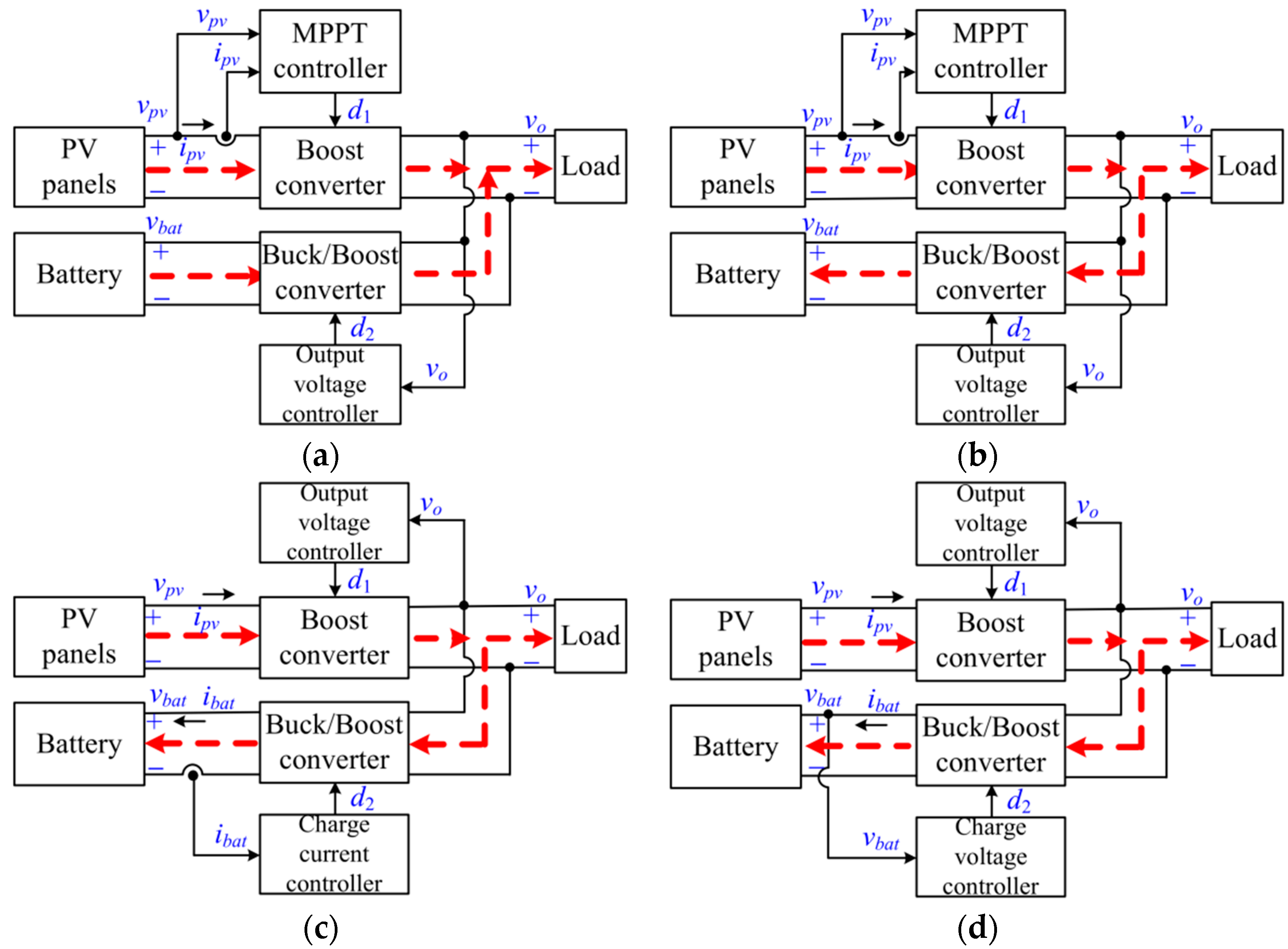
- Operating Mode M1—when Pm < Po, the solar power is insufficient, the PV panels are thus operating in MPPT mode controlled by the boost converter, while the battery supplies the complementary power via the bidirectional buck/boost converter working in boost mode to regulate the DC bus voltage vo, the inductor current iLb2 is positive (the reference direction is shown as in Figure 1). Figure 2a shows the energy flow and the corresponding control requirements of M1, in which d1 and d2 are the duty cycles of Q1 and Q2, respectively, Q3 is always complementary to Q2. When Pm > Po, the excessive power will be stored in the battery. Under this condition, if ibat < Ibmax, it is unnecessary to control ibat, so the control system is the same as that in Figure 2a. The corresponding power flow is described in Figure 2b, which compared to Figure 2a, only the direction of iLb2 is reversed.
- Operating Mode M2—when Pm > Po and ibat reaches the maximum charge current limit Ibmax, ibat is required to be controlled so as to protect the battery. Thus, the bidirectional buck/boost converter operates in buck mode to control ibat. Meanwhile, the PV panels have to quit MPPT control mode and to regulate the dc bus voltage, as shown in Figure 2c.
- Operating Mode M3—when Pm > Po and vbat achieves the maximum battery voltage limit Vbmax, the bidirectional converter will operate in buck mode to control vbat. At the same time, the boost converter still regulates vo, as shown in Figure 2d.
2.2. Proposed PVDCM Control Strategy
- Operating mode M1—when the PVDCM operates in M1, ipv (here also denotes as iLb1) is controlled by a peak current control loop to implement the MPPT algorithm. Meanwhile, the bidirectional converter operates in boost mode to regulate vo through a voltage control loop. Here, ve1 > 0, and ve2 < 0, ve3 < 0 due to the charge current and charge voltage not reaching the limited value. Accordingly, D1 is on, and D2 and D3 are off, the modulation signal vc of the “PWM Comparator2” is vc = ve1. Under this condition, since ve1 > 0, the diode Dc is thus turned off, and Iref = Ipvref. When Pm becomes larger than Po, the excessive energy will charge the battery automatically due to the dc voltage is controlled by the bidirectional converter.
- Operating Mode M2—when Pm is much larger than Po, the excessive energy from the PV panels makes ibat reach Ibmax, the charge current loop is thus triggered and ve2 increases until it is larger than ve1, then D2 is turned on and D1 is turned off, and the bidirectional converter switches from boost mode to buck mode to control the charge current. Therefore, the DC voltage is not controlled during this transient interval. However, at the same time, the power delivered to the battery is controlled to a limit level so that much more power will be delivered to the load, which will lead to an increase in vo, and ve1 will decrease via the output voltage regulator. When ve1 falls below 0, diode Dc is turned on, then Iref = ve1 + Ipvref. With the adjustment of the MPPT algorithm, Ipvref will continue to increase, and ve1 will continue to decrease. In order to end this process, an upper limit Imax needs to be set for Ipvref in the MPPT algorithm, which should be slightly larger than the output current of the maximum power point for the PV panels in all conditions. During the execution process, if Ipvref exceeds Imax, Ipvref = Imax will be kept fixed, the MPPT algorithm is then disabled. Therefore, when the above adjustment process reaches steady state again, the PV panels exit the MPPT mode, and the boost converter controls vo through an outer voltage control loop and an inner current control loop. According to the analysis, the system can switch from M1 to M2 smoothly. If Pm decreases or Po increases, the system will switch from M2 to M1, which is the reverse process of the above analysis.
- Operating Mode M3—whenever Pm > Po, as long as vbat reaches Vbmax, the charge voltage control loop is triggered, as vbatf increases, then ve3 increases. During the period ve3 < ve2, the battery is charged with the constant charge current Ibmax through charge current control loop, so vbatf still increases, ve3 increases until ve3 > ve2, D3 is on and D2 is off, and the charge voltage control loop begins to take care of the battery and control it to operate at a constant voltage. Then the system switches to M3 automatically.
3. The Discrete-Time Model
4. The Stability Boundaries of PVDCM
- The system will become unstable with the PI parameters change. As kp1 gets larger or τi1 gets smaller, it’s much easier for the output voltage control loop to lose its stability.
- As the output voltage regulator is shared in M1, M2, and M3, the system stability is always affected by the parameters kp1 and τi1 (in mode M2 and M3 are similar), which have narrower stable regions in M1 than that in the other two operating modes. Consequently, they need to be designed in operating mode M1.
- Vpv and Ipvref are related to the PV panels, which also have influence on the stability and also determine the worst operating condition for the voltage control loop in operating mode M1. The parameters Vpv and Ipvref become the smaller in M1, the system operating condition will become worse.
5. Experimental Validation
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Xu, M.; Ruan, X.B.; Liu, F.X.; Yang, D.S. Energy Management for hybrid photovoltaic-fuel cell power system. Trans. China Electrotech. Soc. 2010, 25, 166–175. [Google Scholar]
- Zhou, H.H.; Bhattacharya, T.; Duong, T.; Siew, T.S.T.; Khambadkone, A.M. Composite Energy Storage System Involving Battery and Ultracapacitor with Dynamic Energy Management in Microgrid Applications. IEEE Trans. Power Electron. 2011, 26, 923–930. [Google Scholar] [CrossRef]
- Liao, Z.L.; Xu, Y.J.; Shi, W.D. Wind-Photovoltaic Hybrid Double-Input Buck-Boost DC/DC Converter. IEEE Trans. Ind. Electron. 2014, 51, 63–66. [Google Scholar]
- Umuhoza, J.; Zhang, Y.Z.; Zhao, S.; Mantooth, H.A. An adaptive control strategy for power balance and the intermittency mitigation in battery-PV energy system at residential DC microgrid level. In Proceedings of the 2017 IEEE Applied Power Electronics Conference and Exposition (APEC), Tampa, FL, USA, 26–30 March 2017. [Google Scholar]
- Das, S.; Akella, A.K. A Control Strategy for Power Management of an Isolated Micro Hydro-PV-Battery Hybrid Energy System. In Proceedings of the ICEES, Chennai, India, 7–9 February 2018. [Google Scholar]
- Xu, Q.; Hu, X.; Wang, P. A Decentralized Dynamic Power Sharing Strategy for Hybrid Energy Storage System in Autonomous DC Microgrid. IEEE Trans. Ind. Electron. 2017, 64, 5930–5941. [Google Scholar] [CrossRef]
- Jia, Y.H.; Liu, T.; Wu, H.F. A SiC-Based Dual-Input Buck-Boost Converter with Independent MPPT for Photovoltaic Power Systems. In Proceedings of the IECON, Washington, DC, USA, 21–23 October 2018. [Google Scholar]
- Qin, W.P.; Liu, X.S.; Han, X.Q.; Liu, J.Y.; Zhu, X.; Mi, X.D. An Improved Control Strategy of Automatic Charging/Discharging of Energy Storage System in DC Microgrid. Power Syst. Technol. 2014, 38, 1827–1834. [Google Scholar]
- Anounce, K.; Bouya, M.; Ghazouani, M. Hybrid renewable energy system to maximize the electrical power production. In Proceedings of the IRSEC, Marrakech, Morocco, 14–17 November 2016. [Google Scholar]
- Kwon, M.H.; Choi, S.W. Control Scheme for Autonomous and Smooth Mode Switching of Bidirectional DC-DC Converters in a DC Microgrid. IEEE Trans. Power Electron. 2018, 33, 7094–7104. [Google Scholar] [CrossRef]
- Mobarrez, M.; Fregosi, D.; Jalali, G.; Bhattacharya, S.; Bahmani, M.A. A Novel Control Method for Preventing the PV and Load Fluctuations in a DC Microgrid from Transferring to the AC Power Grid. In Proceedings of the 2017 IEEE Second International Conference on DC Microgrids (ICDCM), Nuremburg, Germany, 27–29 June 2017. [Google Scholar]
- Mi, Y.; Wu, Y.W.; Zhu, Y.Z.; Fu, Y.; Wang, C.S. Coordinated Control for Autonomous DC Microgrid with Dynamic Load Power Sharing. Power Syst. Technol. 2017, 41, 440–447. [Google Scholar]
- Lu, X.N.; Sun, K.; Guerrero, J.M.; Vasquez, J.C.; Huang, L.P. State-of-Charge Balance Using Adaptive Droop Control for Distributed Energy Storage Systems in DC Microgrid Applications. IEEE Trans. Ind. Electron. 2014, 61, 2804–2815. [Google Scholar] [CrossRef]
- Sharma, R.K.; Mishra, S. Dynamic Power Management and Control of a PV PEM Fuel-Cell-Based Standalone ac/dc Microgrid Using Hybrid Energy Storage. IEEE Trans. Ind. Appl. 2018, 54, 526–538. [Google Scholar] [CrossRef]
- Guo, L.; Feng, Y.B.; Li, X.L.; Wang, C.S.; Li, Y.W. Stability Analysis and Research of Active Damping Method for DC Microgrids. Proc. CSEE 2016, 36, 927–936. [Google Scholar]
- Gu, Y.J.; Li, W.H.; He, X.N. Frequency-Coordinating Virtual Impedance for Autonomous Power Management of DC Microgrid. IEEE Trans. Power Electron. 2015, 30, 2328–2337. [Google Scholar] [CrossRef]
- Gu, Y.J.; Xiang, X.; Li, W.H.; He, X.N. Mode-Adaptive Decentralized Control for Renewable DC Microgrid with Enhanced Reliability and Flexibility. IEEE Trans. Power Electron. 2014, 29, 5072–5080. [Google Scholar] [CrossRef]
- Khorsandi, A.; Ashourloo, M.; Mokhtari, H. A Decentralized Control Method for a Low-Voltage DC Microgrid. IEEE Trans. Energy Convers. 2014, 29, 793–801. [Google Scholar] [CrossRef]
- Xie, Y.; Jia, R.; Dong, K.S.; Shen, W.C.; Li, Z.; Yang, N. Modeling and Simulation of an AC Microgrid. High Volt. Appar. 2015, 51, 101–107. [Google Scholar]
- Li, X.L.; Guo, L.; Wang, C.S.; Li, Y.W. Key Technologies of DC Microgrids: An overview. Proc. CSEE 2016, 36, 2–17. [Google Scholar]
- Su, M.; Liu, Z.J.; Sun, Y.; Han, H.; Hou, X.C. Stability Analysis and Stabilization Methods of DC Microgrid with Multiple Parallel-Connected DC-DC Converters Loaded by CPLs. IEEE Trans. Smart Grid 2018, 9, 132–142. [Google Scholar] [CrossRef]
- Merabet, A.; Ahmed, K.; Ibrahim, H.; Beguenane, R.; Ghias, A. Energy Management and Control System for Laboratory Scale Microgrid based Wind-Pv-Battery. IEEE Trans. Sustain. Energy 2017, 8, 145–154. [Google Scholar] [CrossRef]
- Xu, Q.; Zhang, C.; Wen, C.; Wang, P. A novel composite nonlinear controller for stabilization of constant power load in dc microgrid. IEEE Trans. Smart Grid 2019, 10, 752–761. [Google Scholar] [CrossRef]
- Yi, Z.H.; Dong, W.X.; Etemadi, A.H. A Unifified Control and Power Management Scheme for PV-Battery-Based Hybrid Microgrids for Both Grid-Connected and Islanded Modes. IEEE Trans. Smart Grid 2018, 9, 5975–5985. [Google Scholar] [CrossRef]
- Abbes, D.; Martinez, A.; Champenois, G. Eco-design optimisation of an autonomous hybrid wind-photovoltaic system with battery storage. IET Renew. Power Gener. 2012, 6, 358–371. [Google Scholar] [CrossRef]
- Shi, J.; Zheng, Z.H.; Ai, Q. Modeling of DC microgrid and stability analysis. Electr. Power Autom. Equip. 2010, 30, 86–90. [Google Scholar]
- Radwan, A.A.A.; Mohamed, Y.A.-R.I. Linear active stabilization of converter-dominated DC microgrids. IEEE Trans. Smart Grid 2012, 3, 203–216. [Google Scholar] [CrossRef]
- Dragicevic, T.; Lu, X.; Vasquez, J.C.; Guerrero, J.M. DC microgrids—Part Ⅰ: A review of control strategies and stabilization techniques. IEEE Trans. Power Electron. 2016, 31, 4876–4891. [Google Scholar] [CrossRef]
- Li, Y.; Ruan, X.B.; Yang, D.S. Modeling, analysis and design for hybrid power systems with dual-input dc-dc converter. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), San Jose, CA, USA, 20–24 September 2009. [Google Scholar]
- Liu, D.W.; Li, H.; Marlino, L.D. Design of a 6 kW multiple-input bi-directional dc/dc converter with decoupled current sharing control for hybrid energy storage elements. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition (APEC), Anaheim, CA, USA, 25 February–1 March 2007. [Google Scholar]
- Middlebrook, R.D. Small-signal modeling of pulse-width modulated switched-mode power converters. Proc. IEEE 1988, 76, 343–354. [Google Scholar] [CrossRef]
- Middlebrook, R.D. Modeling current-programmed buck and boost regulators. IEEE Trans. Power Electron. 1989, 4, 36–52. [Google Scholar] [CrossRef]
- Lehman, B.; Bass, R.M. Switching frequency dependent averaged models for PWM DC-DC converters. IEEE Trans. Power Electron. 1996, 11, 89–98. [Google Scholar] [CrossRef]
- Li, X.; Ruan, X.B.; Xiong, X.L.; Jin, Q.; Tse, C.K. Stability Issue of Cascaded Systems with Consideration of Switching Ripple Interaction. IEEE Trans. Power Electron. 2019, 34, 7040–7052. [Google Scholar] [CrossRef]
- Qiu, Y.; Xu, M.; Sun, J.; Lee, F.C. A generic high-frequency model for the nonlinearities in buck converters. IEEE Trans. Power Electron. 2007, 22, 1970–1977. [Google Scholar] [CrossRef]
- Yue, X.; Zhuo, F.; Yang, S.; Pei, Y.; Yi, H. A matrix-based multifrequency output impedance model for beat frequency oscillation analysis in distributed power systems. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 80–92. [Google Scholar] [CrossRef]
- Wereley, N.M. Analysis and Control of Linear Periodically Time Varying Systems. Ph.D. Thesis, Department Aeronaut, Astronaut, Massachusetts Institute of Technology, Cambridge, MA, USA, 1990. [Google Scholar]
- Tse, C.K. Complex Behavior of Switching Power Converters; CRC Press: Boca Raton, FL, USA, 2003. [Google Scholar]
- Xiong, X.L.; Tse, C.K.; Ruan, X.B. Bifurcation analysis of standalone photovoltaic-battery hybrid power system. IEEE Trans. Circuits Syst. I Regul. Pap. 2013, 60, 1354–1365. [Google Scholar] [CrossRef]
- Tse, C.K. Flip bifurcation and chaos in three-state boost switching regulators. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 1994, 41, 16–23. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pm < Po | Pm ≥ Po | ||
|---|---|---|---|
| ibat < Ibmax | ibat ≥ Ibmax | ||
| vbat ≤ Vbmin | OFF | M1 | M2 |
| Vbmin < vbat < Vbmax | M1 | M1 | M2 |
| vbat ≥ Vbmax | M1 | M3 | M3 |
| Parameters | Description | Values |
|---|---|---|
| Vpv | PV output voltage | 20~34 V |
| Ipvref | PV current reference from MPPT | 0~3 A |
| Vocbat | Equivalent battery voltage | 34~40 V |
| rbat | Equivalent battery resistor | 8 mΩ |
| Vbmax | Maximum battery voltage limit | 40 V |
| Ibmax | Maximum battery current limit | 3 A |
| Vo | DC bus voltage | 48 V |
| Io | Load current | 0~5 A |
| Lb1 | Inductance for the inductor Lb1 | 48 μH |
| Lb2 | Inductance for the inductor Lb2 | 48 μH |
| Cf | Capacitance of output capacitor | 1.88 mF |
| Cbat | Equivalent battery capacitance | 400 μF |
| Ks | Current sampling coefficient | 0.1 |
| fs | Switching frequency | 100 kHz |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiong, X.; Yang, Y. A Photovoltaic-Based DC Microgrid System: Analysis, Design and Experimental Results. Electronics 2020, 9, 941. https://doi.org/10.3390/electronics9060941
Xiong X, Yang Y. A Photovoltaic-Based DC Microgrid System: Analysis, Design and Experimental Results. Electronics. 2020; 9(6):941. https://doi.org/10.3390/electronics9060941
Chicago/Turabian StyleXiong, Xiaoling, and Yuchen Yang. 2020. "A Photovoltaic-Based DC Microgrid System: Analysis, Design and Experimental Results" Electronics 9, no. 6: 941. https://doi.org/10.3390/electronics9060941
APA StyleXiong, X., & Yang, Y. (2020). A Photovoltaic-Based DC Microgrid System: Analysis, Design and Experimental Results. Electronics, 9(6), 941. https://doi.org/10.3390/electronics9060941