Design of a Projectile-Borne Data Recorder Triggered by Overload

Abstract
:1. Introduction
2. Design Scheme
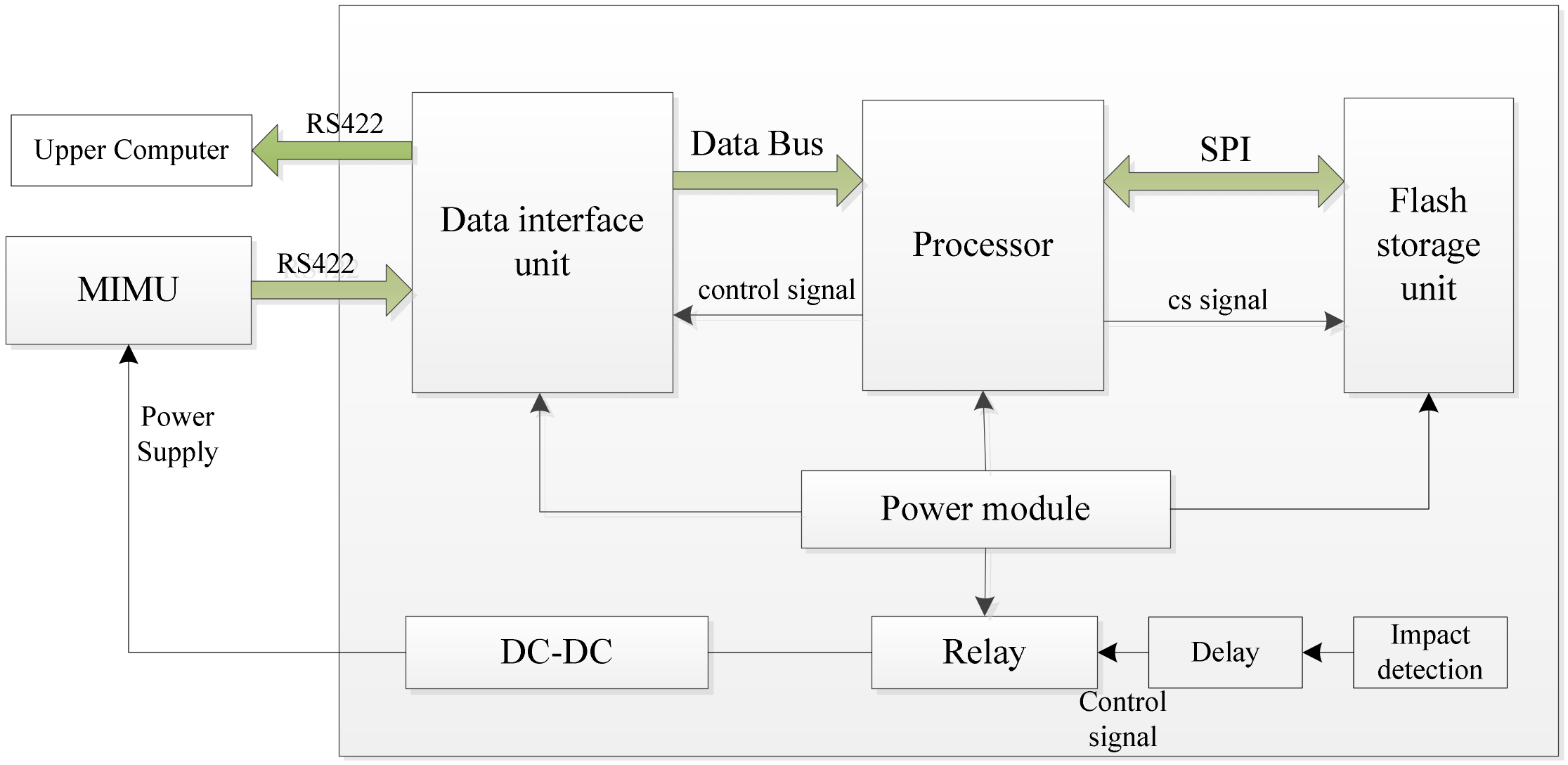
- (1)
- The power supply module only supplies the overload detection module and the recording module at the beginning. If an impact acceleration of certain magnitude is detected in the overload detection module, a trigger signal is created and goes through the delay circuit to relay and supply power to the MIMU. The delay time is determined based on specific requirements.
- (2)
- The data recording module constitutes of the data interface unit, the processor and the nonvolatile data storage unit. The data interface receives the MIMU measurement through RS422, and sends data to the processor via bus. The processor records the sensor data into the nonvolatile storage unit through serial peripheral interface (SPI) bus.
- (3)
- After the experiment, the experimental data is read back from the nonvolatile memory of the processor, and sent to the computer through RS422.
3. Hardware Design
3.1. Data Recording Module
3.1.1. Processor STM32
- It uses ARM’s 32-bit Cortex™-M4 core, which has better performance than other processor chips;
- The working frequency is up to 168 MHz, and the processing speed is fast;
- Floating-point calculation can be carried out;
- Internal integrated digital signal processing (DSP) instruction set, and the development speed is fast;
- Large storage space, and strong expansion of storage space;
- Rich peripherals, with no separate design of external drive;
- Internal integrated hardware debugging function, so it is convenient to check the internal status during debugging;
- Cyclic redundancy check (CRC) computing unit, power monitoring controller, watchdog timer, clock controller and other highly integrated.
3.1.2. Nonvolatile Storage Unit
3.1.3. Data Storage Operation
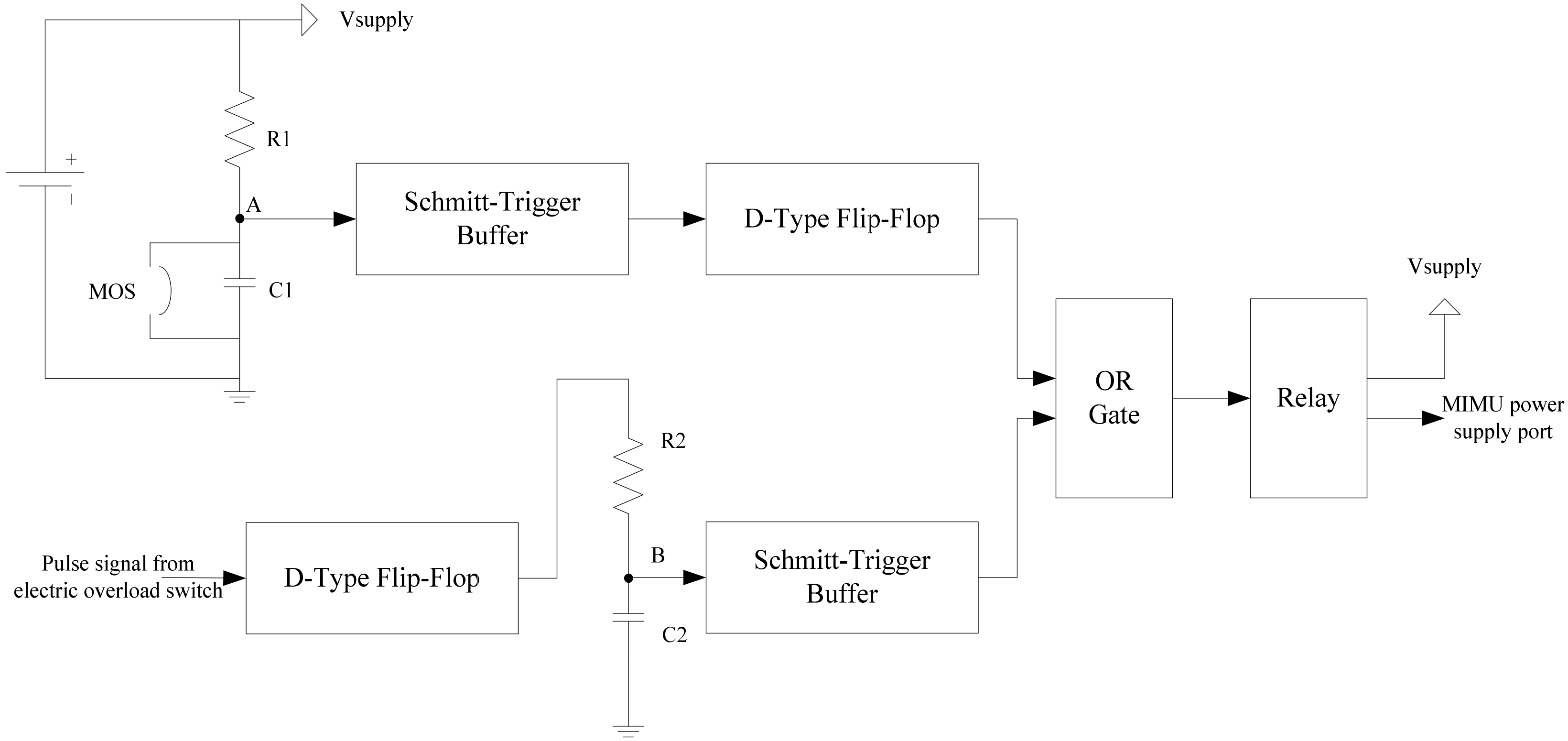
3.2. Impact Detection Module
3.2.1. Mechanical Overload Switch
3.2.2. Electronic Overload Switch
3.2.3. Signal Conditioner
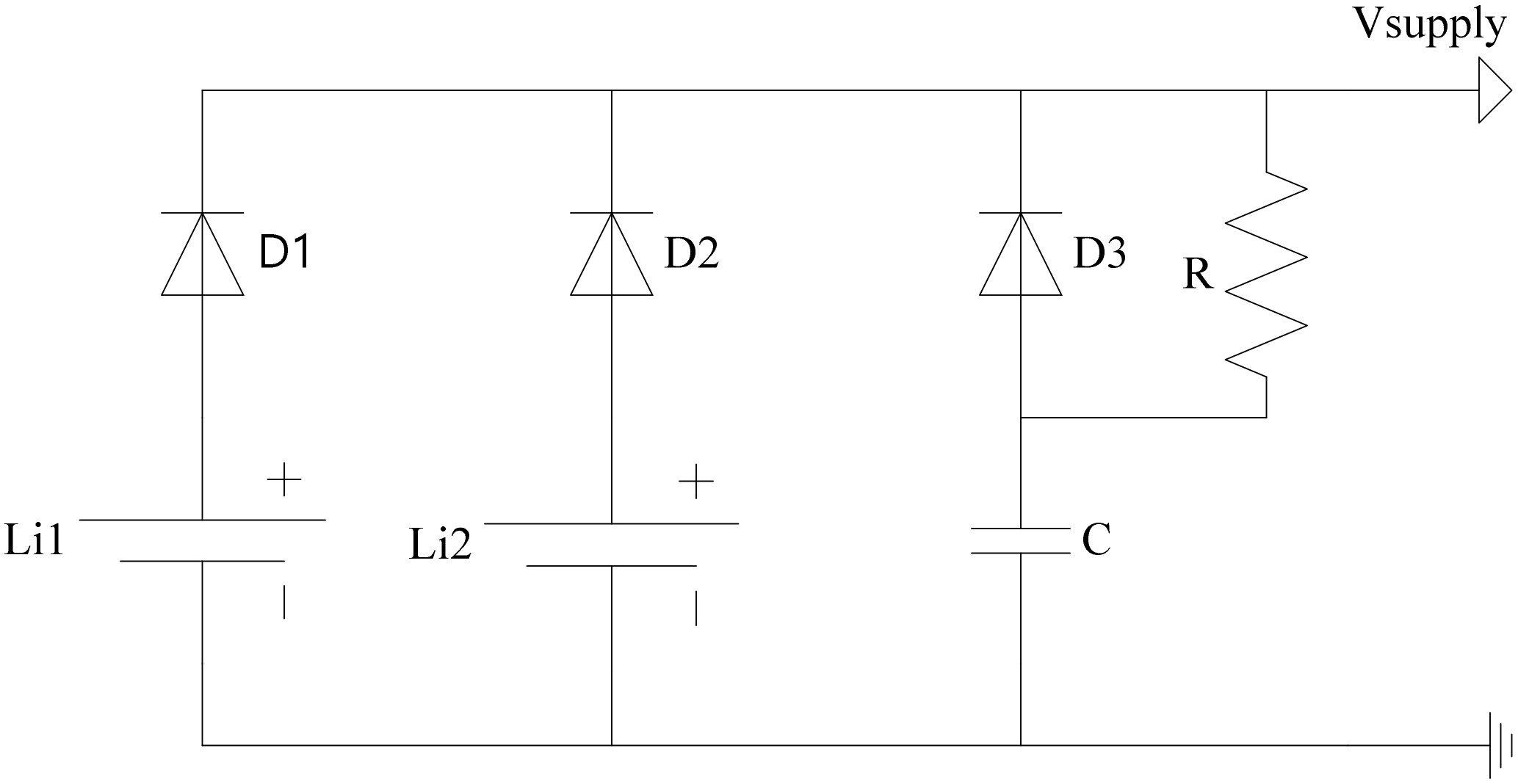
3.3. Power Module
3.4. Vacuum Sealing
4. Experiments and Results
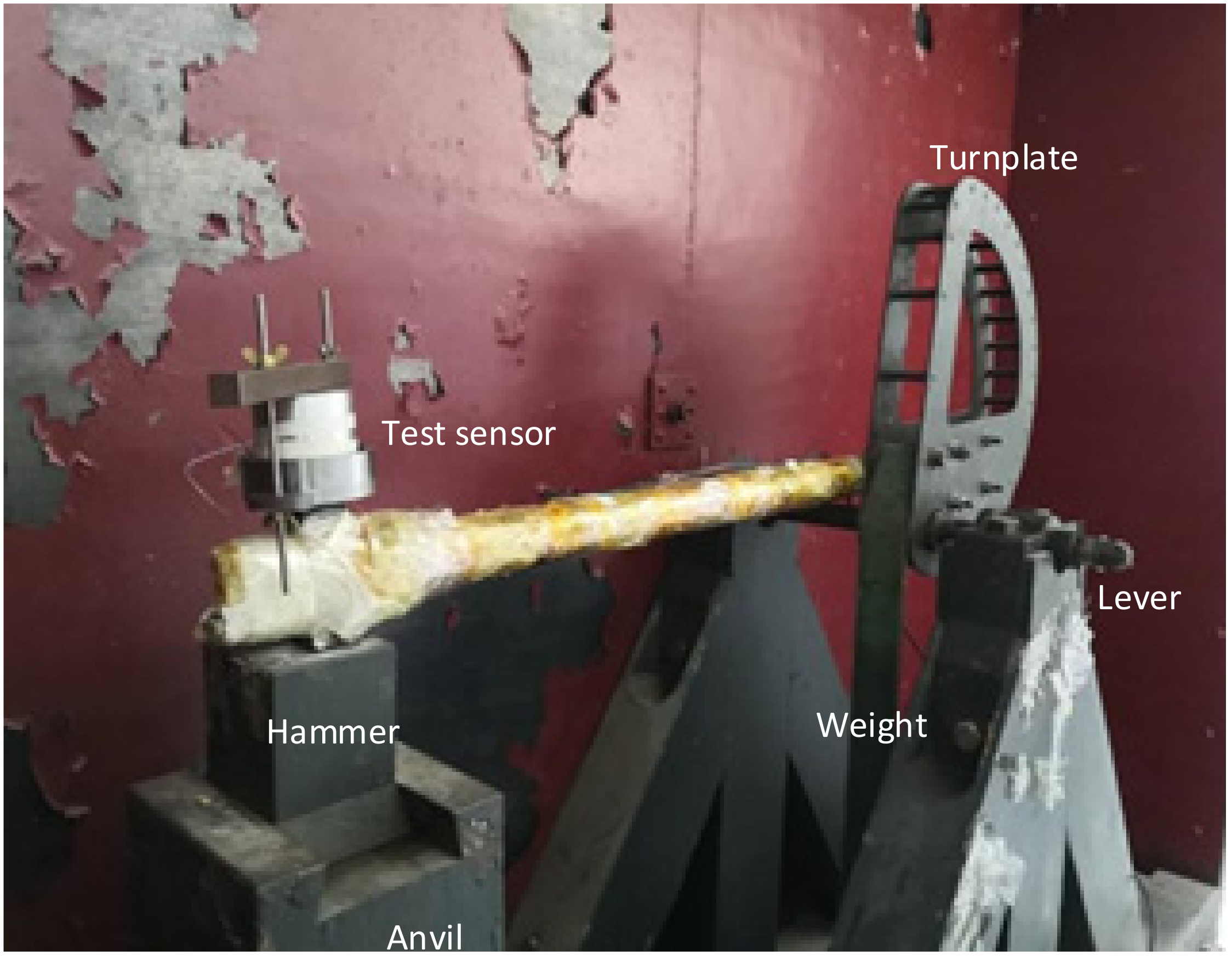
4.1. The Machete Hammer Experiment
4.1.1. Power Parallel Scheme Verification
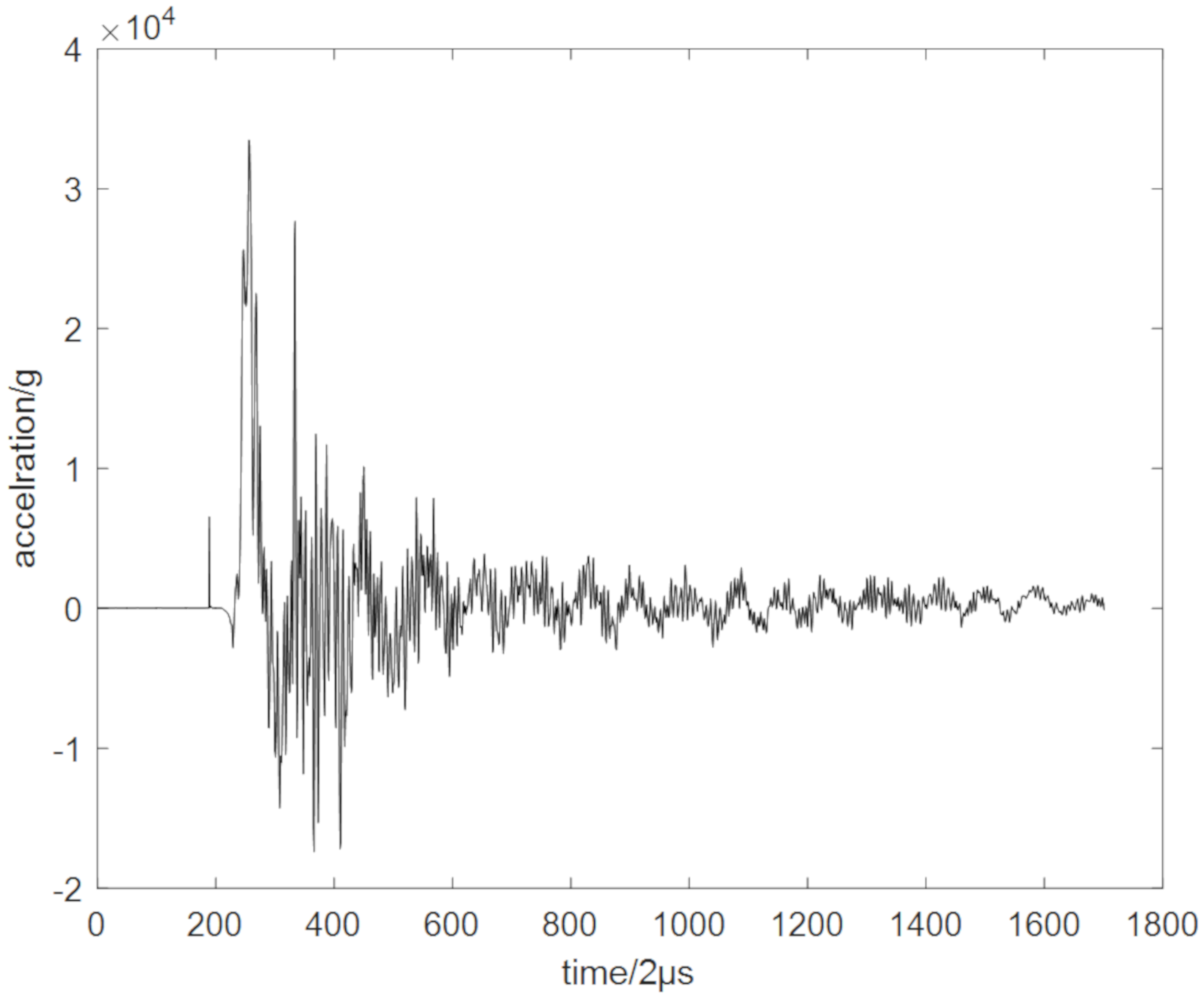
4.1.2. Reliability Verification of the Overload Switch
4.1.3. Integrated Test
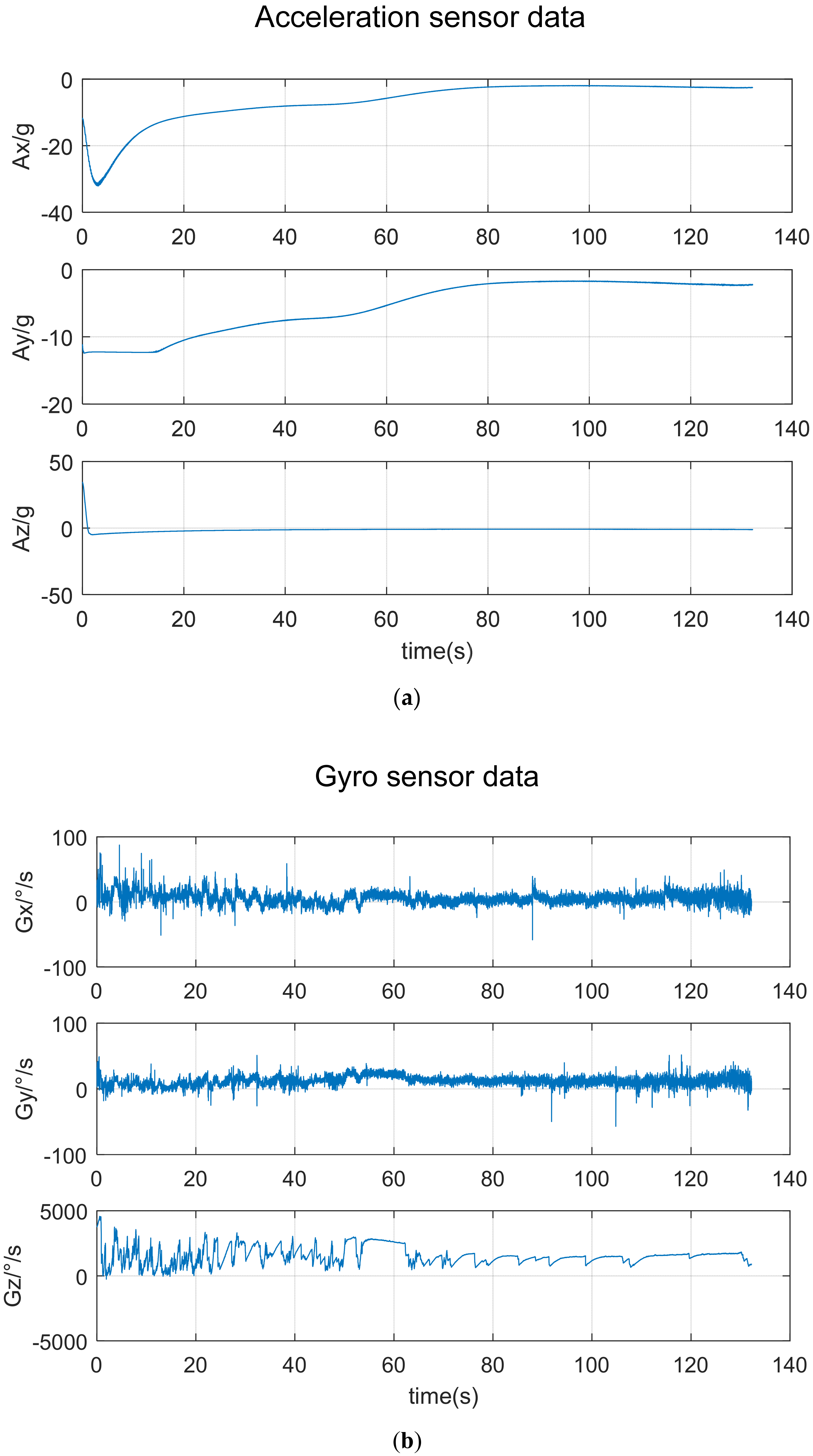
4.2. Launch Test
- Before the test, the MIMU and the data recorder were fixed and sealed in the stainless-steel case, against the high overload. Then, the case was installed in the fuse chamber of the experimental projectile.
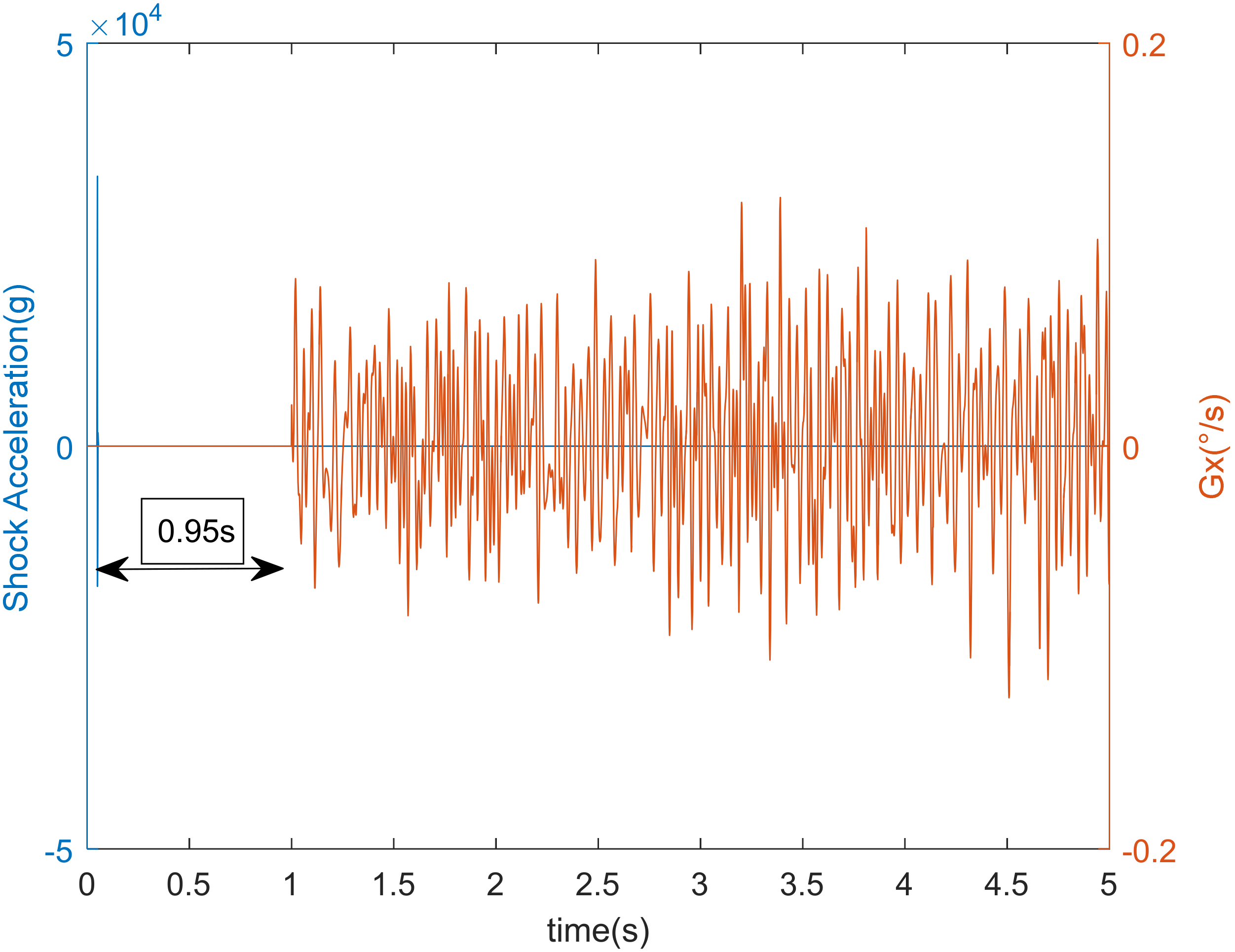
- Before the launch, the overload-triggering circuit and the delay circuit were enabled, but not the MIMU—that is, the overload detection was initiated.
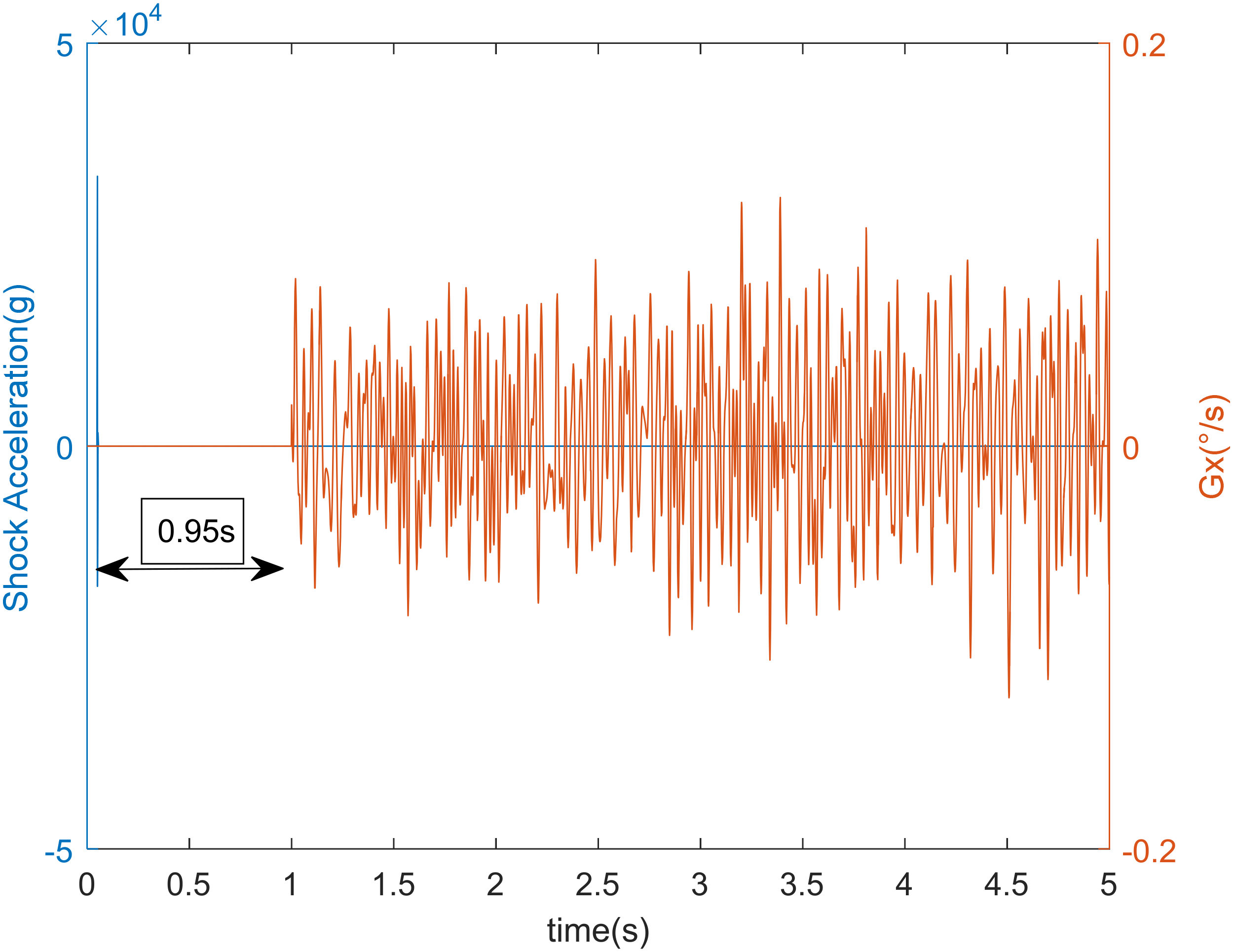
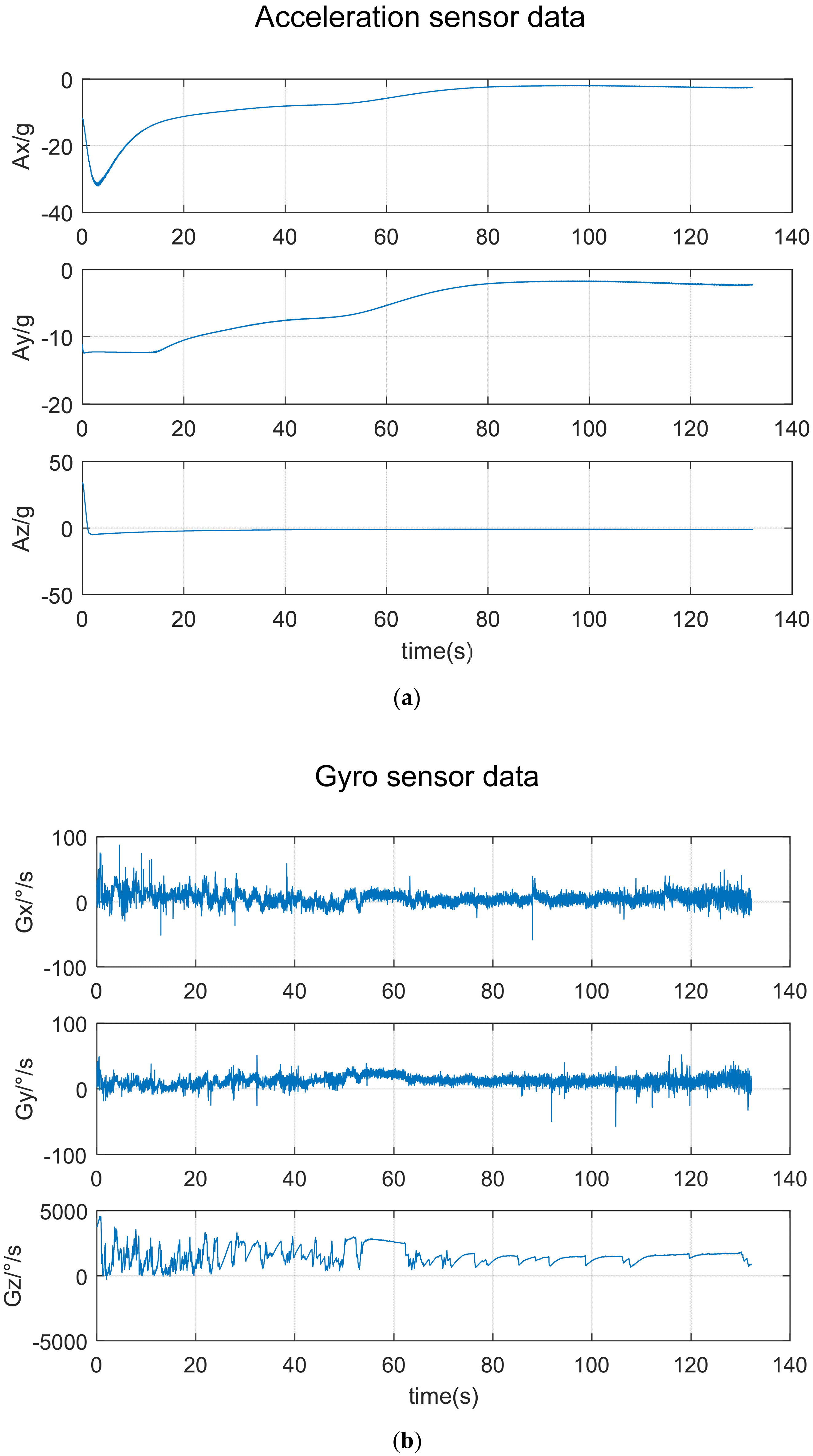
- The projectile was launched. The designed recorder was supposed to have the MIMU powered for 1 s after the projectile left the barrel and collect the MIMU’s output in its storage.
- The landed projectile was found and the data from the recorder was read.
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Shang, J.Y.; Deng, Z.H.; Fu, M.Y.; Wang, S.T. Advance and Perspective on Spin Rate Measurement Technology for Guided Projectile. Acta Autom. Sin. 2016, 42, 1620–1630. [Google Scholar]
- Dowdle, J.R.; Thorvaldsen, T.P.; Kourepenis, A.S. A GPS/INS guidance system for Navy 5-in projectiles. In Proceedings of the Guidance, Navigation, & Control Conference, Chicago, IL, USA, 11–13 August 1997. [Google Scholar]
- Pamadi, K.; Ohlmeyer, E.; Pepitone, T. Assessment of a GPS Guided Spinning Projectile Using an Accelerometer-Only IMU. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Providence, RI, USA, 16–19 August 2004. [Google Scholar]
- Lin, Y.W.; Efimovskaya, A.; Shkel, A.M. Study of Environmental Survivability and Stability of Folded MEMS IMU. In Proceedings of the 2017 IEEE International Symposium on Inertial Sensors and System, Kauai, HI, USA, 28–30 March 2017. [Google Scholar]
- Heinz, D.B.; Hong, V.A.; Yang, Y.S. High-G (>20,000 g) inertial shock survivability of epitaxially encapsulated silicon MEMS devices. In Proceedings of the 2017 IEEE 30th International Conference on Micro Electro Mechanical Systems (MEMS), Las Vegas, NV, USA, 22–26 January 2017. [Google Scholar]
- Whelan, A.J. The Development of a Warhead Into an Integrated Weapon System to Provide an Advanced Battlefield Capability. Master’s Thesis, University College London, London, UK, 2011. [Google Scholar]
- Lu, Y.; Wu, X.; Zhang, W.; Chen, W.; Cui, F.; Liu, W. Optimization and analysis of novel piezoelectric solid micro-gyroscope with high resistance to shock. Microsyst. Technol. 2010, 16, 571–584. [Google Scholar] [CrossRef]
- Yoon, S.; Park, U.; Rhim, J.; Yang, S.S. Tactical grade MEMS vibrating ring gyroscope with high shock reliability. Microelectron. Eng. 2015, 142, 22–29. [Google Scholar] [CrossRef]
- Nesterenko, T.G.; Koleda, A.N.; Barbin, E.S. Integrated microelectromechanical gyroscope under shock loads. IOP Conf. Ser. Mater. Sci. Eng. 2018, 289, 12003. [Google Scholar] [CrossRef]
- Zhou, J.; Jiang, T.; Jiao, J.-W.; Wu, M. Design and fabrication of a micromachined gyroscope with high shock resistance. Microsyst. Technol. 2014, 20, 137–144. [Google Scholar] [CrossRef]
- Cao, H.; Zhang, Y.; Kou, Z.; Shi, Y.; Tang, J.; Liu, J. Summary of research on high overload resistance micromechanical gyroscope. J. Hebei Univ. Sci. Technol. 2018, 39, 289–298. [Google Scholar]
- Xu, M.; Bu, X.; Yu, J.; He, Z. Spinning projectile’s attitude measurement with lw infrared radiation under sea-sky background. Infrared Phys. Technol. 2018, 90, 214–220. [Google Scholar] [CrossRef]
- Zhao, Y.N.; Leng, X.B. Spin-rate measurement of terminal homing projectile based on micro-Doppler analysis. J. Proj. Rocket. Missiles Guid. 2015, 35, 159–161. [Google Scholar]
- Davis, B.; Malejko, G.; Dohrn, R.; Owens, S.; Harkins, T.; Bischer, G. Addressing the challenges of a thruster-based precision guided mortar munition with the use of embedded telemetry instrumentation. ITEA J. 2009, 30, 117–125. [Google Scholar]
- Tanno, H.; Komuro, T.; Sato, K.; Itoh, K. Free-flight aerodynamic test with projectile-onboard data recorder in a ballistic range. In Proceedings of the AIAA Aerospace Sciences Meeting Including the New Horizons Forum & Aerospace Exposition, Grapevine, TX, USA, 7–10 January 2013. [Google Scholar]
- Zhu, P.G.; Zhang, X.L. Design of Recorder for Projectile Attitude Measurement and Date Based on ARM. Ship Electron. Eng. 2015, 35, 150–153. [Google Scholar]
- Fresconi, F.; Harkins, T. Experimental flight characterization of asymmetric and maneuvering projectiles from elevated gun firings. J. Spacecr. Rocket. 2012, 49, 1120–1130. [Google Scholar] [CrossRef]
- Liang, Y. Design and Implementation of Dual Backup Solid State Memory for a Telemetry System. Master’s Thesis, North University of China, Taiyuan, China, 2014. [Google Scholar]
- Ma, Q.; Xu, X.; Kong, Y.; Guo, T. Analysis and design of high overload resistance of missile-borne recorder. J. Proj. Rock. Miss. Guid. 2015, 35, 15–18. [Google Scholar]
- Li, C.; Sun, P. The research and implementation of airborne flight data recorder based on STM32. In Proceedings of the International Industrial Informatics & Computer Engineering Conference, Shaanxi, China, 10–11 January 2015. [Google Scholar]
- Liu, Q. Research on Functional Magnetic Stimulation Therapeutic Apparatus Based on STM32F4. Master’s Thesis, Dalian University of Technology, Dalian, China, 2018. [Google Scholar]
- Navuri, K.; Prakash, D.; Mani, P.B.; Kumar, A.E. Shock Response Analysis of Mechanical Hardware of Flight Data Recorder. Mater. Today Proc. 2017, 4, 8000–8009. [Google Scholar] [CrossRef]
- Hill-Lindsay, J.W.; Yuen, J. High G Impact Resistant Digital Data Recorder for Missile Flight Testing. In Proceedings of the Nonvolatile Memory Technology Review IEEE, Linthicum Heights, MD, USA, 22–24 June 1993. [Google Scholar]
- Zhou, T.; Lian, B.; Yang, S.; Zhang, Y.; Liu, Y. Improved GNSS Cooperation Positioning Algorithm for Indoor Localization. Comput. Mater. Contin. 2018, 56, 225–245. [Google Scholar]
- Xiao, C.J. Design of Missile-Borne Data Recorder Based on SOC. Master’s Thesis, Xidian University, Xi’an, China, 2014. [Google Scholar]
- Wang, S.; Zhang, Y.; Zhang, L.; Cao, N.; Pang, C. An Improved Memory Cache Management Study Based on Spark. Comput. Mater. Contin. 2018, 56, 415–431. [Google Scholar]
- Wang, B.; Kong, W.; Guan, H.; Neal, N.X. Air Quality Forecasting based on Gated Recurrent Long Short-Term Memory Model in Internet of Things, Computers, Networks & Communications. IEEE Access 2019, 7, 69524–69534. [Google Scholar]
- Huang, J.; Gou, T.; Li, X. Research on acceleration detection method of overload switch action. Electromech. Compon. 2019, 39, 48–50. [Google Scholar]
- Sun, J.L. Development of Small High Reliable Overload Switch. Master’s Thesis, Harbin Institute of Technology, Harbin, China, 2015. [Google Scholar]
- Cheng, X.; Zhao, H.; Jiao, M. Dynamic response characteristics of missile-borne recorder protection system under high impact load. Exp. Shock Wave 2019, 39, 117–125. [Google Scholar]
- Wang, C.; Chen, G.Y.; Deng, K.J. Design of a portable high g value impact test device. J. Vib. Shock 2010, 29, 227–229. [Google Scholar]
- Li, S.L. Study on Overload Characteristics and Simulation Test Method of Projectile Launching and Landing. Master’s Thesis, Nanjing University of Science and Technology, Nanjing, China, 2008. [Google Scholar]
- Qi, M.; Sun, L. Analysis of polyurethane cushioning performance based on machete hammer test. Packag. Eng. 2016, 37, 108–110. [Google Scholar]
- Kang, F.; Ma, S.; Ma, Q. Study on the characteristics of reserve lithium battery under high overload. J. Detect. Control 2007, 29, 39. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tooth Number | g | Mechanical Switch Status | Accelerometer Switch Status |
|---|---|---|---|
| 13 | 9500 | × | × |
| 14 | 11,000 | × | √ |
| 15 | 13,000 | × | √ |
| 16 | 20,000 | √ | √ |
| 17 | 30,000 | √ | √ |
| Test Scenarios | Gyroscopes | Accelerometers | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Bias (°/h) | Scale (ppm) | Bias Stability (mg) | Scale (ppm) | |||||||||
| Gx | Gy | Gz | Gx | Gy | Gz | Ax | Ay | Az | Ax | Ay | Az | |
| Before Impact | 159.3 | −111.1 | −84.2 | 166.6 | 182.3 | 114.5 | 1.40 | 1.50 | 0.94 | 119.7 | 126.2 | 127.9 |
| After Impact | 186.2 | −90.8 | −100.6 | 172.5 | 205.0 | 125.3 | 1.75 | 1.26 | 0.89 | 152.3 | 98.7 | 120.6 |
| Change | 26.9 | 20.3 | −16.4 | 5.9 | 22.7 | 10.8 | 0.35 | −0.24 | −0.05 | 32.6 | −27.5 | −7.3 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Z.; Wang, Y.; Zhu, L.; Yang, F. Design of a Projectile-Borne Data Recorder Triggered by Overload. Electronics 2020, 9, 860. https://doi.org/10.3390/electronics9050860
Wu Z, Wang Y, Zhu L, Yang F. Design of a Projectile-Borne Data Recorder Triggered by Overload. Electronics. 2020; 9(5):860. https://doi.org/10.3390/electronics9050860
Chicago/Turabian StyleWu, Zhiqiang, Yu Wang, Lihua Zhu, and Fan Yang. 2020. "Design of a Projectile-Borne Data Recorder Triggered by Overload" Electronics 9, no. 5: 860. https://doi.org/10.3390/electronics9050860
APA StyleWu, Z., Wang, Y., Zhu, L., & Yang, F. (2020). Design of a Projectile-Borne Data Recorder Triggered by Overload. Electronics, 9(5), 860. https://doi.org/10.3390/electronics9050860