Foreign Object Detection for Electric Vehicle Wireless Charging

 ,
, 

Abstract
1. Introduction
2. Foreign Object Models
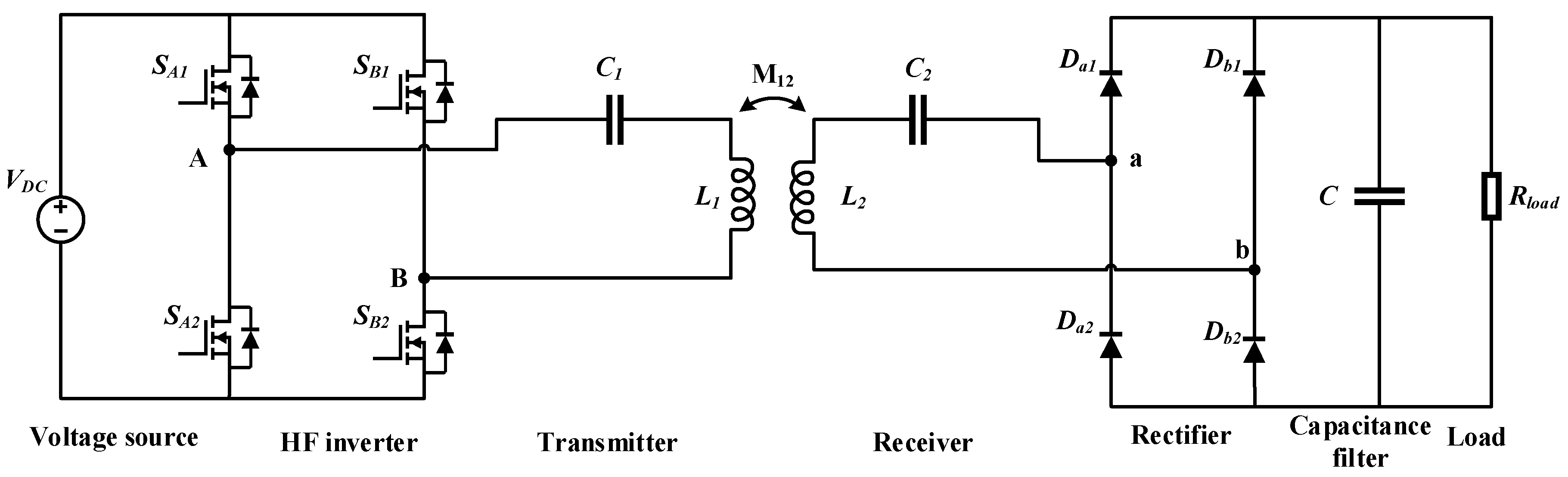
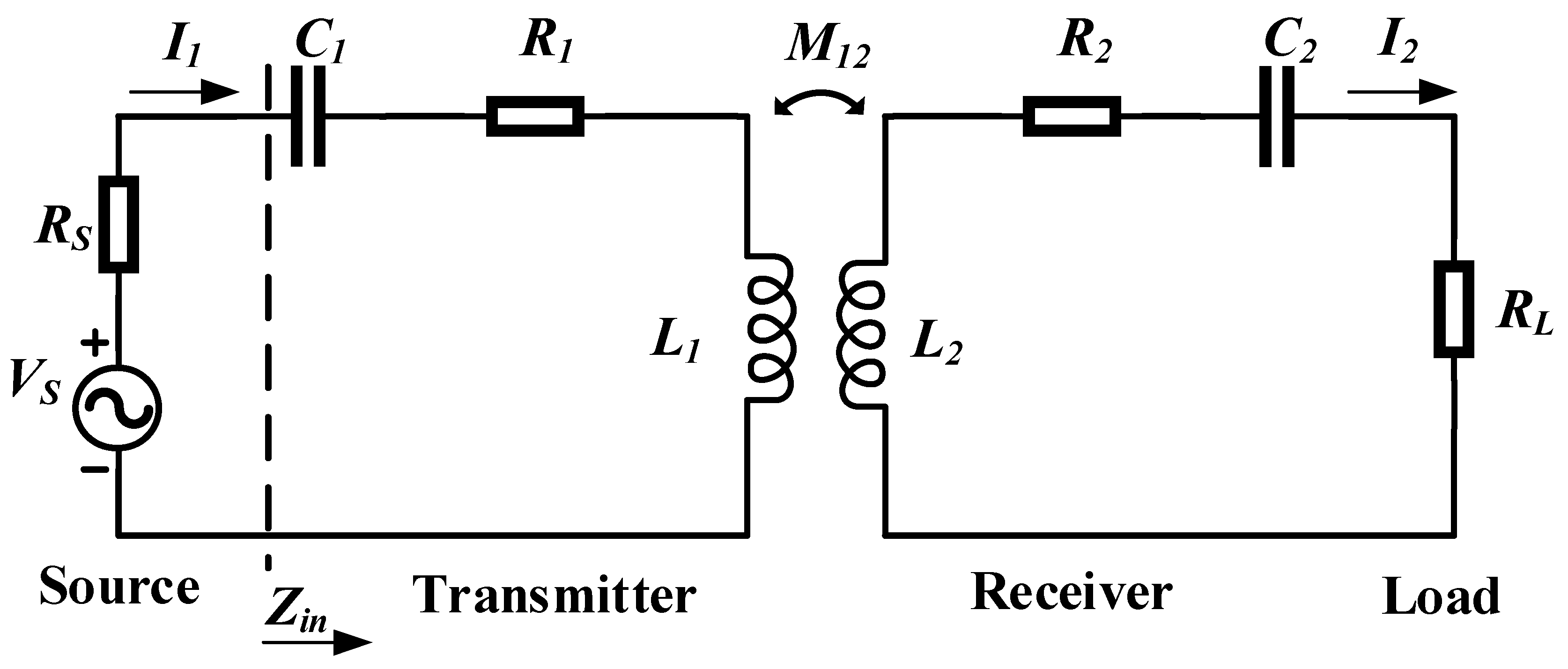
2.1. Typical WPT System
2.2. Foreign Object Models
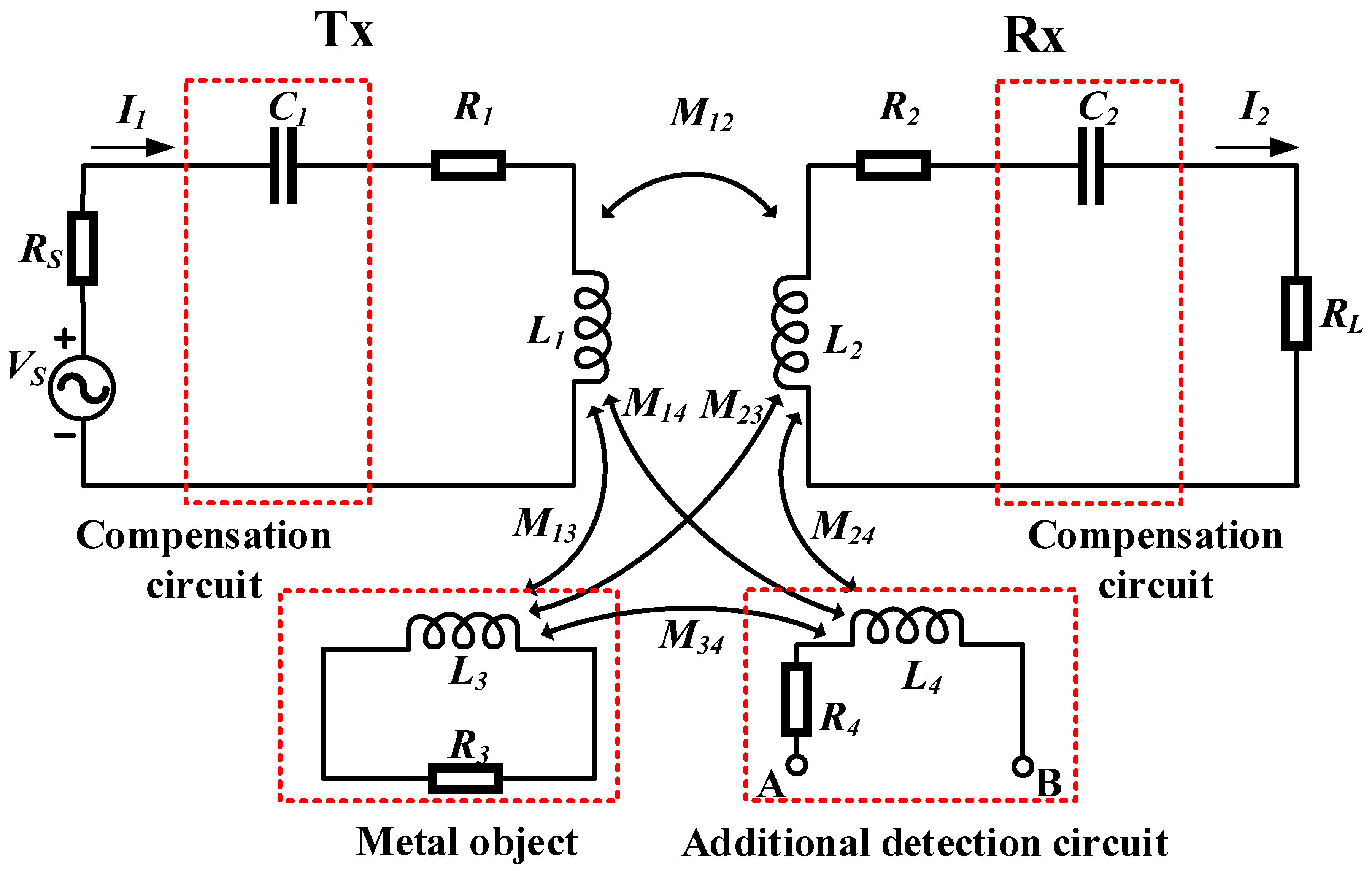
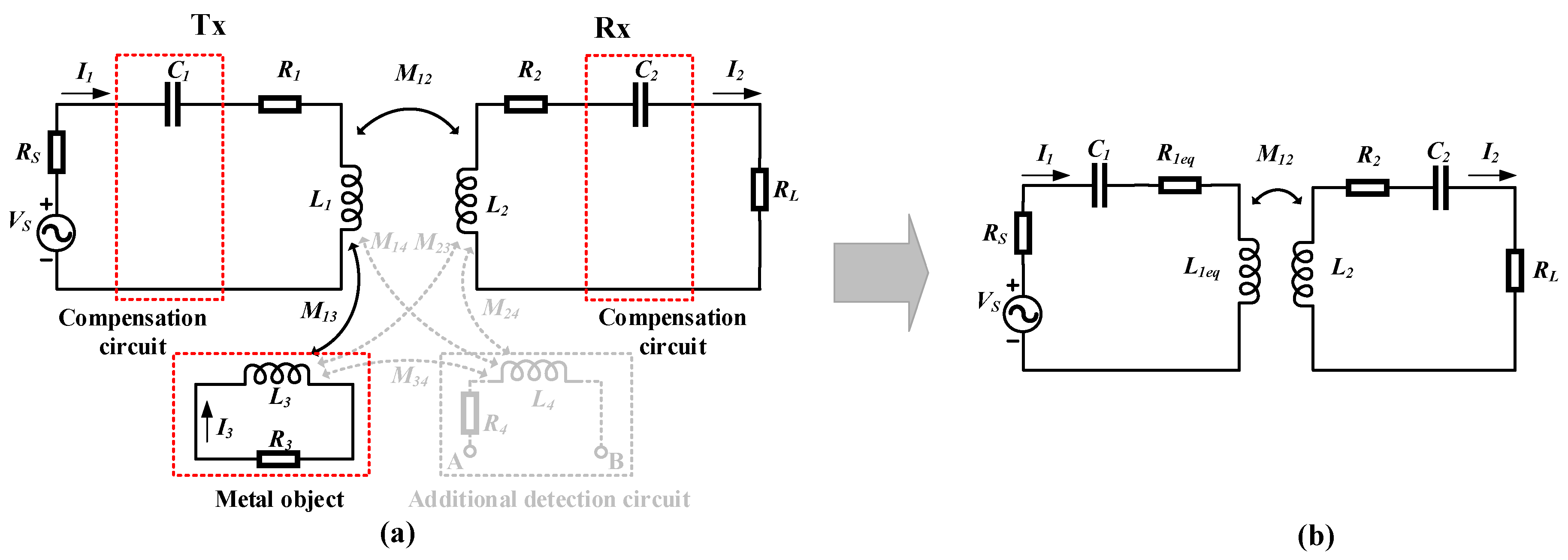
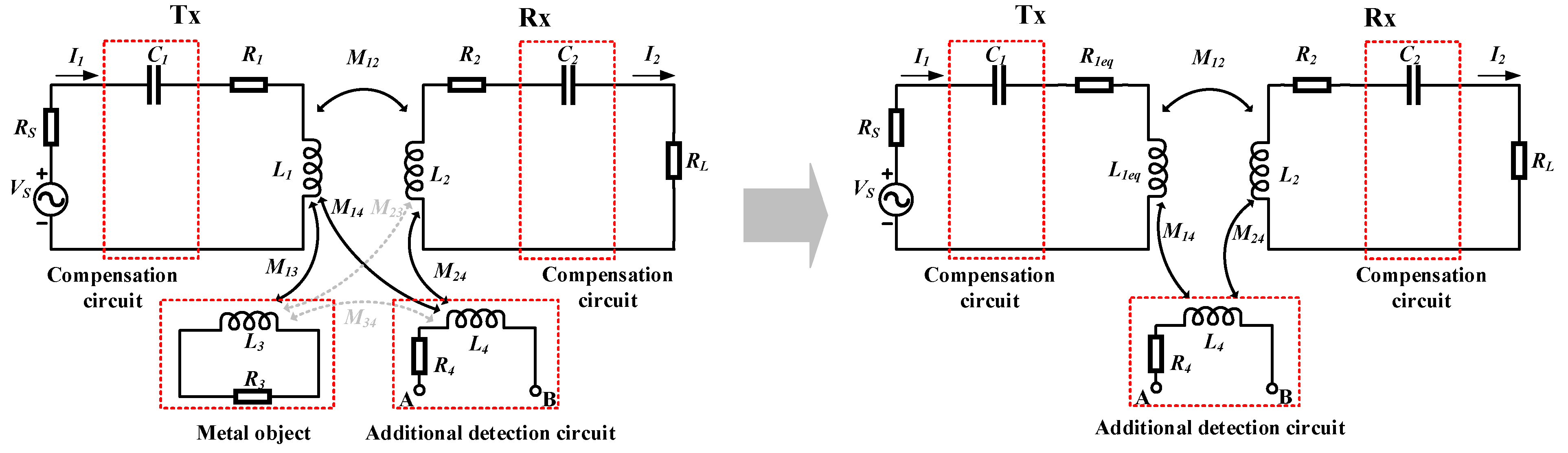
2.2.1. Metal Object Model
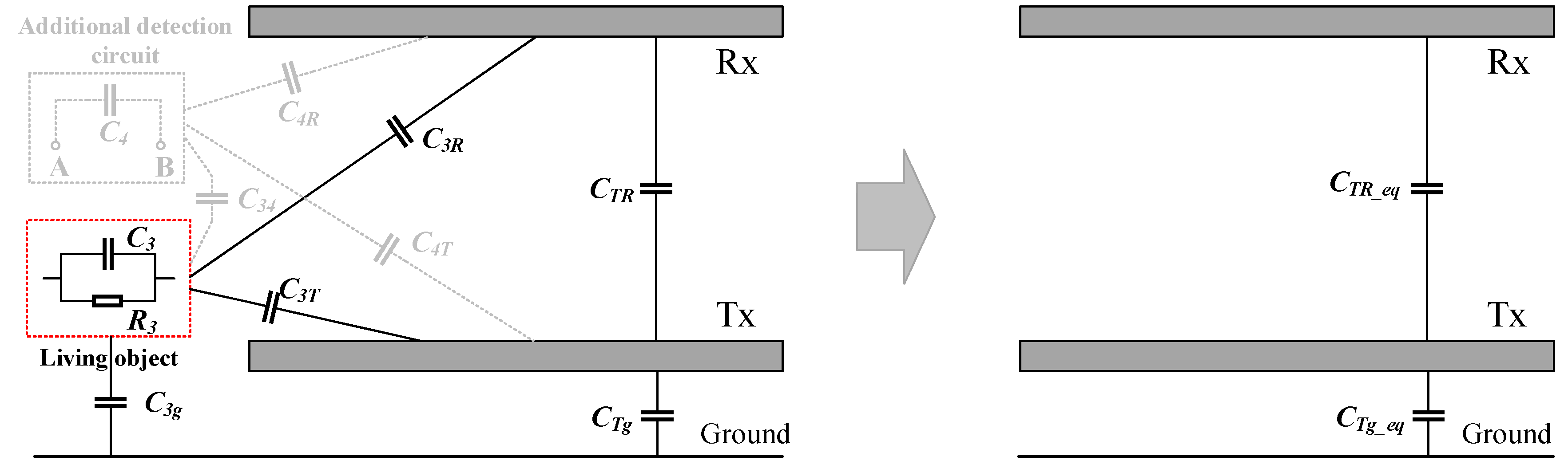
2.2.2. Living Object Model
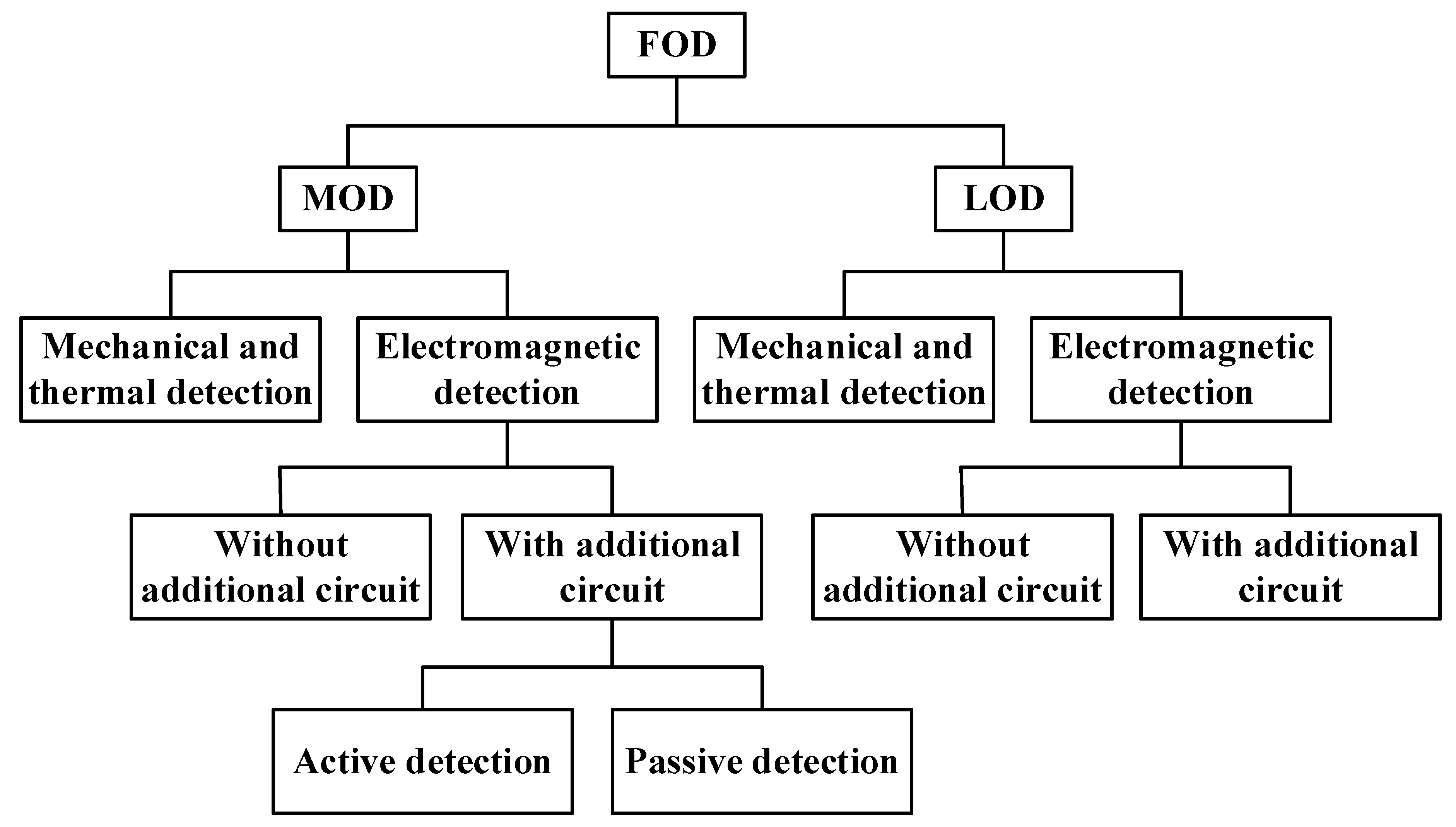
3. Foreign Object Detection Methods
3.1. Metal Object Detection Methods
3.1.1. Detection Methods Without an Additional Circuit
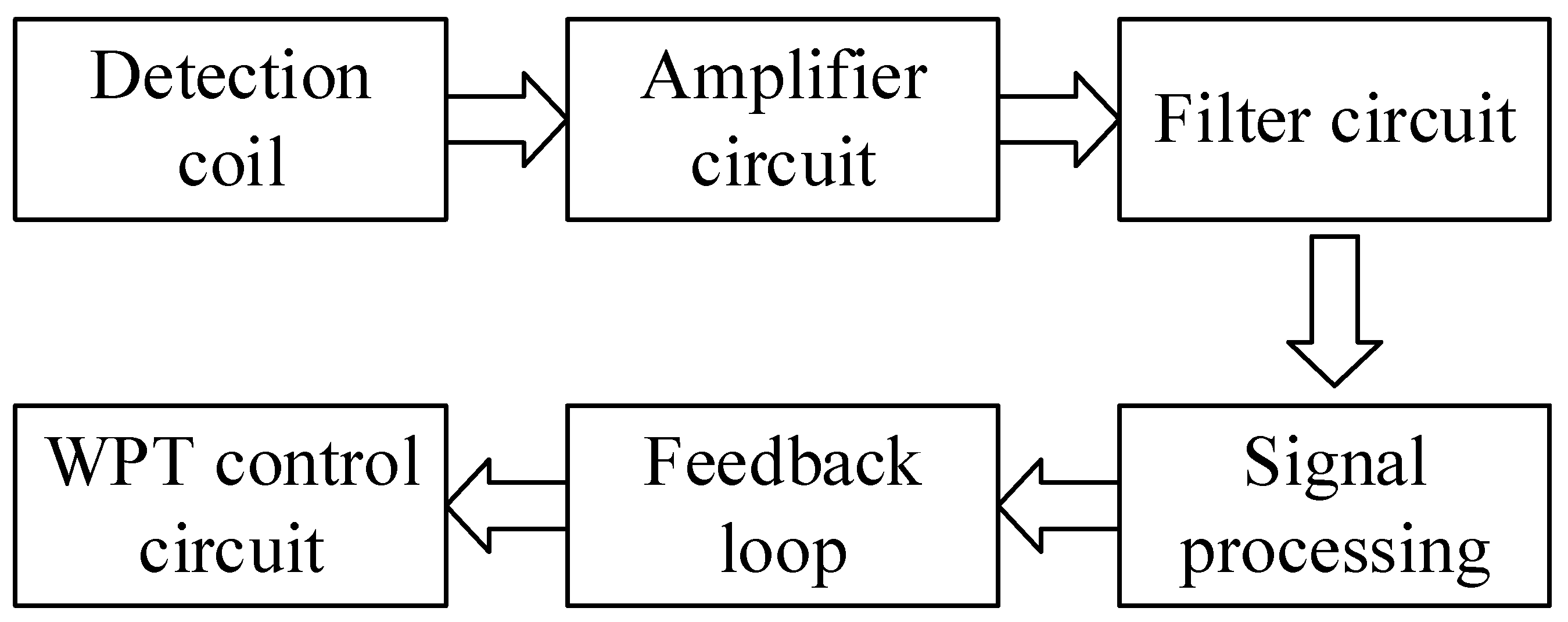
3.1.2. Detection Methods with An Additional Circuit
3.2. Lving Object Detection Methods
3.2.1. Mechanical and Thermal Detection Methods
3.2.2. Electromagnetic Detection Methods
3.3. Conclusions
4. Conclusions and Future Challenges
Author Contributions
Funding
Conflicts of Interest
References
- Kurs, A.; Karalis, A.; Moffatt, R.; Joannopoulos, J.D.; Fisher, P.; Soljačić, M. Wireless power transfer via strongly coupled magnetic resonances. Science 2007, 317, 83–86. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y.; El Baghdadi, M.; Lan, Y.; Benomar, Y.; Van Mierlo, J.; Hegazy, O. Design methodology, modeling, and comparative study of wireless power transfer systems for electric vehicles. Energies 2018, 11, 1716. [Google Scholar] [CrossRef]
- Dobrzan´ ski, D. Overview of currently used wireless electrical vehicle charging solutions. Inform. Autom. Pomiary Gospod. Ochr. Środowiska 2018, 8, 47–50. [Google Scholar] [CrossRef]
- Patil, D.; McDonough, M.K.; Miller, J.M.; Fahimi, B.; Balsara, P.T. Wireless power transfer for vehicular applications: Overview and challenges. IEEE Trans. Transp. Electrif. 2018, 4, 3–37. [Google Scholar] [CrossRef]
- Lu, F.; Zhang, H.; Hofmann, H.; Mi, C.C. An inductive and capacitive combined wireless power transfer system with LC-compensated topology. IEEE Trans. Power Electron. 2016, 31, 8471–8482. [Google Scholar] [CrossRef]
- Tran, D.H.; Vu, V.B.; Choi, W. Design of a high-efficiency wireless power transfer system with intermediate coils for the on-board chargers of electric vehicles. IEEE Trans. Power Electron. 2018, 33, 175–187. [Google Scholar] [CrossRef]
- Moon, S.; Moon, G. Wireless power transfer system with an asymmetric four-coil resonator for electric vehicle battery chargers. IEEE Trans. Power Electron. 2016, 31, 6844–6854. [Google Scholar]
- Moon, S.; Kim, B.C.; Cho, S.Y.; Ahn, C.H.; Moon, G.W. Analysis and design of a wireless power transfer system with an intermediate coil for high efficiency. IEEE Trans. Ind. Electron. 2014, 61, 5861–5870. [Google Scholar] [CrossRef]
- Zhang, J.; Yuan, X.; Wang, C.; He, Y. Comparative analysis of two-coil and three-coil structures for wireless power transfer. IEEE Trans. Power Electron. 2017, 32, 341–352. [Google Scholar] [CrossRef]
- Del Toro García, X.; Vázquez, J.; Roncero-Sánchez, P. Design, implementation issues and performance of an inductive power transfer system for electric vehicle chargers with series–series compensation. IET Power Electron. 2015, 8, 1920–1930. [Google Scholar] [CrossRef]
- Li, W.; Zhao, H.; Li, S.; Deng, J.; Kan, T.; Mi, C.C. Integrated LCC compensation topology for wireless charger in electric and plug-in electric vehicles. IEEE Trans. Ind. Electron. 2015, 62, 4215–4225. [Google Scholar] [CrossRef]
- Li, S.; Li, W.; Deng, J.; Nguyen, T.D.; Mi, C.C. A double-sided LCC compensation network and its tuning method for wireless power transfer. IEEE Trans. Veh. Technol. 2015, 64, 2261–2273. [Google Scholar] [CrossRef]
- Zhang, W.; Mi, C.C. Compensation topologies of high-power wireless power transfer systems. IEEE Trans. Veh. Technol. 2016, 65, 4768–4778. [Google Scholar] [CrossRef]
- Bosshard, R.; Kolar, J.W.; Mühlethaler, J.; Stevanovic´, I.; Wunsch, B.; Canales, F. Modeling and η-α-pareto optimization of inductive power transfer coils for electric vehicles. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 50–64. [Google Scholar] [CrossRef]
- Miller, J.M.; Daga, A. Elements of wireless power transfer essential to high power charging of heavy duty vehicles. IEEE Trans. Transp. Electrif. 2015, 1, 26–39. [Google Scholar] [CrossRef]
- Kan, T.; Nguyen, T.; White, J.C.; Malhan, R.K.; Mi, C.C. A new integration method for an electric vehicle wireless charging system using LCC compensation topology: Analysis and design. IEEE Trans. Power Electron. 2017, 32, 1638–1650. [Google Scholar] [CrossRef]
- Chen, W.; Liu, C.; Lee, C.H.; Shan, Z. Cost-effectiveness comparison of coupler designs of wireless power transfer for electric vehicle dynamic charging. Energies 2016, 9, 906. [Google Scholar] [CrossRef]
- Luo, Z.; Wei, X. Analysis of square and circular planar spiral coils in wireless power transfer system for electric vehicles. IEEE Trans. Ind. Electron. 2018, 65, 331–341. [Google Scholar] [CrossRef]
- Hsieh, Y.; Lin, Z.; Chen, M.; Hsieh, H.; Liu, Y.; Chiu, H. High-efficiency wireless power transfer system for electric vehicle applications. IEEE Trans. Circuits Syst. II-Express Briefs 2017, 64, 942–946. [Google Scholar] [CrossRef]
- Li, H.; Li, J.; Wang, K.; Chen, W.; Yang, X. A maximum efficiency point tracking control scheme for wireless power transfer systems using magnetic resonant coupling. IEEE Trans. Power Electron. 2015, 30, 3998–4008. [Google Scholar] [CrossRef]
- Miller, J.M.; Onar, O.C.; Chinthavali, M. Primary-side power flow control of wireless power transfer for electric vehicle charging. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 147–162. [Google Scholar] [CrossRef]
- Gao, Y.; Ginart, A.; Farley, K.B.; Tse, Z.T.H. Misalignment effect on efficiency of wireless power transfer for electric vehicles. In Proceedings of the 2016 IEEE Applied Power Electronics Conference and Exposition (APEC), Long Beach, CA, USA, 20–24 March 2016; pp. 3526–3528. [Google Scholar]
- Aldhaher, S.; Luk, P.C.; Whidborne, J.F. Electronic tuning of misaligned coils in wireless power transfer systems. IEEE Trans. Power Electron. 2014, 29, 5975–5982. [Google Scholar] [CrossRef]
- Mou, X.; Groling, O.; Sun, H. Energy-efficient and adaptive design for wireless power transfer in electric vehicles. IEEE Trans. Ind. Electron. 2017, 64, 7250–7260. [Google Scholar] [CrossRef]
- Karakitsios, I.; Karfopoulos, E.; Madjarov, N.; Bustillo, A.; Ponsar, M.; Del Pozo, D.; Marengo, L. An integrated approach for dynamic charging of electric vehicles by wireless power transfer-lessons learned from real-life implementation. SAE Int. J. Altern. Powertrains 2017, 6, 15–24. [Google Scholar] [CrossRef]
- Regensburger, B.; Kumar, A.; Sinha, S.; Doubleday, K.; Pervaiz, S.; Popovic, Z.; Afridi, K. High-performance large air-gap capacitive wireless power transfer system for electric vehicle charging. In Proceedings of the 2017 IEEE Transportation Electrification Conference and Expo (ITEC), Chicago, IL, USA, 22–24 June 2017; pp. 638–643. [Google Scholar]
- Li, S.; Liu, Z.; Zhao, H.; Zhu, L.; Shuai, C.; Chen, Z. Wireless Power Transfer by Electric Field Resonance and Its Application in Dynamic Charging. IEEE Trans. Ind. Electron. 2016, 63, 6602–6612. [Google Scholar] [CrossRef]
- Bi, Z.; Kan, T.; Mi, C.C.; Zhang, Y.; Zhao, Z.; Keoleian, G.A. A review of wireless power transfer for electric vehicles: Prospects to enhance sustainable mobility. Appl. Energy 2016, 179, 413–425. [Google Scholar] [CrossRef]
- Mi, C.C.; Buja, G.; Choi, S.Y.; Rim, C.T. Modern advances in wireless power transfer systems for roadway powered electric vehicles. IEEE Trans. Ind. Electron. 2016, 63, 6533–6545. [Google Scholar] [CrossRef]
- Shin, J.; Shin, S.; Kim, Y.; Ahn, S.; Lee, S.; Jung, G.; Jeon, S.J.; Cho, D.H. Design and implementation of shaped magnetic-resonance-based wireless power transfer system for roadway-powered moving electric vehicles. IEEE Trans. Ind. Electron. 2014, 61, 1179–1192. [Google Scholar] [CrossRef]
- Buja, G.; Bertoluzzo, M.; Dashora, H.K. Lumped track layout design for dynamic wireless charging of electric vehicles. IEEE Trans. Ind. Electron. 2016, 63, 6631–6640. [Google Scholar] [CrossRef]
- Tavakoli, R.; Pantic, Z. Analysis, design, and demonstration of a 25-kW dynamic wireless charging system for roadway electric vehicles. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 1378–1393. [Google Scholar] [CrossRef]
- Limb, B.J.; Bradley, T.H.; Crabb, B.; Zane, R.; McGinty, C.; Quinn, J.C. Economic and environmental feasibility, architecture optimization, and grid impact of dynamic charging of electric vehicles using wireless power transfer. In Proceedings of the 6th Hybrid and Electric Vehicles Conference (HEVC 2016), London, UK, 2–3 November 2016; pp. 1–6. [Google Scholar]
- Miller, J.M.; Jones, P.T.; Li, J.; Onar, O.C. ORNL experience and challenges facing dynamic wireless power charging of ev’s. IEEE Circuits Syst. Mag. 2015, 15, 40–53. [Google Scholar] [CrossRef]
- Zhou, S.; Mi, C.C. Multi-paralleled LCC reactive power compensation networks and their tuning method for electric vehicle dynamic wireless charging. IEEE Trans. Ind. Electron. 2016, 63, 6546–6556. [Google Scholar] [CrossRef]
- Lu, F.; Zhang, H.; Hofmann, H.; Mi, C.C. A dynamic charging system with reduced output power pulsation for electric vehicles. IEEE Trans. Ind. Electron. 2016, 63, 6580–6590. [Google Scholar] [CrossRef]
- Jiang, H.; Brazis, P.; Tabaddor, M.; Bablo, J. Safety considerations of wireless charger for electric vehicles—A review paper. In Proceedings of the 2012 IEEE Symposium on Product Compliance Engineering Proceedings, Portland, OR, USA, 5–7 November 2012; pp. 1–6. [Google Scholar]
- International Commission on Non-Ionizing Radiation Protection. Guidelines for limiting exposure to time-varying electric and magnetic fields (1 Hz to 100 kHz). Health Phys. 2010, 99, 818–836. [Google Scholar]
- IEEE Standards Coordinating Committee. IEEE Standard for Safety Levels with Respect to Human Exposure to Radio Frequency Electromagnetic Fields, 3 kHz to 300 GHz; Institute of Electrical and Electonics Engineers, Incorporated: Piscataway, NJ, USA, 1992. [Google Scholar]
- Schneider, J. Wireless Power Transfer for Light-duty Plug-in/electric Vehicles and Alignment Methodology; SAE International J2954 Taskforce: Warrendale, PA, USA; Available online: https://www.sae.org/standards/content/j2954_201605/ (accessed on 1 April 2019).
- Commission, I.E. Electric Vehicle Wireless Power Transfer (WPT) Systems—Part 1: General Requirements; International Standard: IEC: Geneva, Switzerland, 2015; pp. 61980–61981. [Google Scholar]
- Simon, O.; Mahlein, J.; Turki, F.; Dörflinger, D.; Hoppe, A. Field test results of interoperable electric vehicle wireless power transfer. In Proceedings of the 2016 18th European Conference on Power Electronics and Applications (EPE’16 ECCE Europe), Karlsruhe, Germany, 5–9 September 2016; pp. 1–10. [Google Scholar]
- Bohn, T.; Glenn, H. A real world technology testbed for electric vehicle smart charging systems and PEV-EVSE interoperability evaluation. In Proceedings of the 2016 IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016; pp. 1–8. [Google Scholar]
- De Santis, V.; Campi, T.; Cruciani, S.; Laakso, I.; Feliziani, M. Assessment of the induced electric fields in a carbon-fiber electrical vehicle equipped with a wireless power transfer system. Energies 2018, 11, 684. [Google Scholar] [CrossRef]
- Shimamoto, T.; Laakso, I.; Hirata, A. Internal electric field in pregnant-woman model for wireless power transfer systems in electric vehicles. Electron. Lett. 2015, 51, 2136–2137. [Google Scholar] [CrossRef]
- Jo, M.; Sato, Y.; Kaneko, Y.; Abe, S. Methods for reducing leakage electric field of a wireless power transfer system for electric vehicles. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014; pp. 1762–1769. [Google Scholar]
- Shijo, T.; Ogawa, K.; Suzuki, M.; Kanekiyo, Y.; Ishida, M.; Obayashi, S. EMI reduction technology in 85 kHz band 44 kW wireless power transfer system for rapid contactless charging of electric bus. In Proceedings of the 2016 IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016; pp. 1–6. [Google Scholar]
- Regensburger, B.; Sinha, S.; Kumar, A.; Vance, J.; Popovic, Z.; Afridi, K.K. Kilowatt-scale large air-gap multi-modular capacitive wireless power transfer system for electric vehicle charging. In Proceedings of the 2018 IEEE Applied Power Electronics Conference and Exposition (APEC), San Antonio, TX, USA, 4–8 March 2018; pp. 666–671. [Google Scholar]
- Ombach, G. Design and safety considerations of interoperable wireless charging system for automotive. In Proceedings of the 2014 Ninth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte-Carlo, Monaco, 25–27 March 2014; pp. 1–4. [Google Scholar]
- Ombach, G. Design considerations for wireless charging system for electric and plug-in hybrid vehicles. In Proceedings of the ET Hybrid and Electric Vehicles Conference 2013 (HEVC 2013), London, UK, 6–7 November 2013; pp. 1–4. [Google Scholar]
- Cirimele, V.; Rosu, S.G.; Guglielmi, P.; Freschi, F. Performance evaluation of wireless power transfer systems for electric vehicles using the opposition method. In Proceedings of the 2015 IEEE 1st International Forum on Research and Technologies for Society and Industry Leveraging a better tomorrow (RTSI), Turin, Italy, 16–18 September 2015; pp. 546–550. [Google Scholar]
- Musavi, F.; Eberle, W. Overview of wireless power transfer technologies for electric vehicle battery charging. IET Power Electron. 2014, 7, 60–66. [Google Scholar] [CrossRef]
- Li, S.; Mi, C.C. Wireless power transfer for electric vehicle applications. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 4–17. [Google Scholar]
- Kalwar, K.A.; Aamir, M.; Mekhilef, S. Inductively coupled power transfer (ICPT) for electric vehicle charging—A review. Renew. Sustain. Energy Rev. 2015, 47, 462–475. [Google Scholar]
- Kudo, H.; Ogawa, K.; Oodachi, N.; Deguchi, N.; Shoki, H. Detection of a metal obstacle in wireless power transfer via magnetic resonance. In Proceedings of the 2011 IEEE 33rd International Telecommunications Energy Conference (INTELEC), Amsterdam, The Netherlands, 9–13 October 2011; pp. 1–6. [Google Scholar]
- Moghaddami, M.; Sarwat, A.I. A sensorless conductive foreign object detection for inductive electric vehicle charging systems based on resonance frequency deviation. In Proceedings of the 2018 IEEE Industry Applications Society Annual Meeting (IAS), Portland, OR, USA, 23–27 September 2018; pp. 1–6. [Google Scholar]
- Liu, X.; Liu, C.; Han, W.; Pong, P.W.T. Design and implementation of a multi-purpose TMR sensor matrix for wireless electric vehicle charging. IEEE Sens. J. 2018, 19, 1683–1692. [Google Scholar] [CrossRef]
- Zhou, B.; Liu, Z.Z.; Chen, H.X.; Zeng, H.; Hei, T. A new metal detection method based on balanced coil for mobile phone wireless charging system. IOP Conf. Ser. Earth Environ. Sci. 2016, 40, 012029. [Google Scholar] [CrossRef]
- Sonapreetha, M.R.; Jeong, S.Y.; Choi, S.Y.; Rim, C.T. Dual-purpose non-overlapped coil sets as foreign object and vehicle location detections for wireless stationary EV chargers. In Proceedings of the 2015 IEEE PELS Workshop on Emerging Technologies: Wireless Power (2015 WoW), Daejeon, Korea, 5–6 June 2015; pp. 1–7. [Google Scholar]
- Jeong, S.Y.; Kwak, H.G.; Jang, G.C.; Choi, S.Y.; Rim, C.T. Dual-purpose nonoverlapping coil sets as metal object and vehicle position detections for wireless stationary EV chargers. IEEE Trans. Power Electron. 2018, 33, 7387–7397. [Google Scholar] [CrossRef]
- Abad, D.G. Development of a Capacitive Bioimpedance Measurement System. Master’s Thesis, RWTH Aachen University, Aachen, Germany, 2009. [Google Scholar]
- Jeong, S.Y.; Kwak, H.G.; Jang, G.C.; Rim, C.T. Living object detection system based on comb pattern capacitive sensor for wireless EV chargers. In Proceedings of the 2016 IEEE 2nd Annual Southern Power Electronics Conference (SPEC), Auckland, New Zealand, 5–8 December 2016; pp. 1–6. [Google Scholar]
- Aliau-Bonet, C.; Pallas-Areny, R. A novel method to estimate body capacitance to ground at mid frequencies. IEEE Trans. Instrum. Meas. 2013, 62, 2519–2525. [Google Scholar] [CrossRef]
- Aliau-Bonet, C.; Pallas-Areny, R. Effects of stray capacitance to ground in bipolar material impedance measurements based on direct-contact electrodes. IEEE Trans. Instrum. Meas. 2014, 63, 2414–2421. [Google Scholar] [CrossRef]
- Santis, V.D.; Beeckman, P.A.; Lampasi, D.A.; Feliziani, M. Assessment of human body impedance for safety requirements against contact currents for frequencies up to 110 MHz. IEEE Trans. Biomed. Eng. 2011, 58, 390–396. [Google Scholar] [CrossRef] [PubMed]
- Jeong, J.; Ryu, S.; Lee, B.; Kim, H. Tech tree study on foreign object detection technology in wireless charging system for electric vehicles. In Proceedings of the 2015 IEEE International Telecommunications Energy Conference (INTELEC), Osaka, Japan, 18–22 October 2015; pp. 1–4. [Google Scholar]
- Hoffman, P.F.; Boyer, R.J.; Henderson, R.A. Foreign Object Detection System and Method Suitable for Source Resonator of Wireless Energy Transfer System. U.S. Patent 9,304,042, 2016. [Google Scholar]
- Sonnenberg, T.; Stevens, A.; Dayerizadeh, A.; Lukic, S. Combined Foreign Object Detection and Live Object Protection in Wireless Power Transfer Systems via Real-Time Thermal Camera Analysis. In Proceedings of the 2019 IEEE Applied Power Electronics Conference and Exposition (APEC), Anaheim, CA, USA, 17–21 March 2019; pp. 1547–1552. [Google Scholar]
- Roy, A.M.; Katz, N.; Kurs, A.B.; Buenrostro, C.; Verghese, S.; Kesler, M.P.; Hall, K.L.; Lou, H.T. Foreign Object Detection in Wireless Energy Transfer Systems. U.S. Patent 9,404,954, 2016. [Google Scholar]
- Widmer, H.; Sieber, L.; Daetwyler, A.; Bittner, M. Systems, Methods, and Apparatus for Radar-Based Detection of Objects in a Predetermined Space. U.S. Patent 9,772,401, 2017. [Google Scholar]
- Zhang, Y.; Yan, Z.; Zhu, J.; Li, S.; Mi, C. A review of foreign object detection (FOD) for inductive power transfer systems. eTransportation 2019, 1, 100002. [Google Scholar] [CrossRef]
- Wang, Y.C.; Chiang, C.W. Foreign metal detection by coil impedance for EV wireless charging system. In Proceedings of the EVS28 International Electric Vehicle Symposium Exhibition, KINTEX, Goyang, Korea, 3–6 May 2015; pp. 3–6. [Google Scholar]
- Low, Z.N.; Casanova, J.J.; Maier, P.H.; Taylor, J.A.; Chinga, R.A.; Lin, J. Method of load/fault detection for loosely coupled planar wireless power transfer system with power delivery tracking. IEEE Trans. Ind. Electron. 2010, 57, 1478–1486. [Google Scholar]
- Lan, L.; Ting, N.M.; Aldhaher, S.; Kkelis, G.; Kwan, C.H.; Arteaga, J.M.; Yates, D.C.; Mitcheson, P.D. Foreign object detection for wireless power transfer. In Proceedings of the 2018 2nd URSI Atlantic Radio Science Meeting (AT-RASC), Meloneras, Spain, 28 May–1 June 2018; pp. 1–2. [Google Scholar]
- Huang, S.; Su, J.; Dai, S.; Tai, C.; Lee, T. Enhancement of wireless power transmission with foreign-object detection considerations. In Proceedings of the 2017 IEEE 6th Global Conference on Consumer Electronics (GCCE), Nagoya, Japan, 24–27 October 2017; pp. 1–2. [Google Scholar]
- Zhang, X.; Jin, Y.; Yang, Q.; Yuan, Z.; Meng, H.; Wang, Z. Detection of metal obstacles in wireless charging system of electric vehicle. In Proceedings of the 2017 IEEE PELS Workshop on Emerging Technologies: Wireless Power Transfer (WoW), Chongqing, China, 20–22 May 2017; pp. 89–92. [Google Scholar]
- Jafari, H.; Moghaddami, M.; Sarwat, A.I. Foreign Object Detection in Inductive Charging Systems Based on Primary Side Measurements. IEEE Trans. Ind. Electron. 2019, 55, 6466–6475. [Google Scholar] [CrossRef]
- Jafari, H.; Olowu, T.O.; Moghaddami, M.; Sarwat, A. High-performance large air-gap capacitive wireless power transfer system for electric vehicle charging. In Proceedings of the 2019 IEEE Transportation Electrification Conference and Expo (ITEC), Detroit, MI, USA, 19–21 June 2019; pp. 1–6. [Google Scholar]
- Fukuda, S.; Nakano, H.; Murayama, Y.; Murakami, T.; Kozakai, O.; Fujimaki, K. A novel metal detector using the quality factor of the secondary coil for wireless power transfer systems. In Proceedings of the 2012 IEEE MTT-S International Microwave Workshop Series on Innovative Wireless Power Transmission: Technologies, Systems, and Applications, Kyoto, Japan, 10–11 May 2012; pp. 241–244. [Google Scholar]
- Kuyvenhoven, N.; Dean, C.; Melton, J.; Schwannecke, J.; Umenei, A.E. Development of a foreign object detection and analysis method for wireless power systems. In Proceedings of the 2011 IEEE Symposium on Product Compliance Engineering Proceedings, San Diego, CA, USA, 10–12 October 2011; pp. 1–6. [Google Scholar]
- Kikuchi, H. Metal-loop effects in wireless power transfer systems analyzed by simulation and theory. In Proceedings of the 2013 IEEE Electrical Design of Advanced Packaging Systems Symposium (EDAPS), Nara, Japan, 12–15 December 2013; pp. 201–204. [Google Scholar]
- Zhang, H.; Ma, D.; Lai, X.; Yang, X.; Tang, H. The optimization of auxiliary detection coil for metal object detection in wireless power transfer. In Proceedings of the 2018 IEEE PELS Workshop on Emerging Technologies: Wireless Power Transfer (Wow), Montréal, QC, Canada, 3–7 June 2018; pp. 1–6. [Google Scholar]
- Jeong, S.Y.; Thai, V.X.; Park, J.H.; Rim, C.T. Self-inductance based metal object detection with mistuned resonant circuits and nullifying induced voltage for wireless EV chargers. IEEE Trans. Power Electron. 2019, 34, 748–758. [Google Scholar] [CrossRef]
- Jeong, S.Y.; Thai, V.X.; Park, J.H.; Rim, C.T. Metal object detection system with parallel-mistuned resonant circuits and nullifying induced voltage for wireless EV chargers. In Proceedings of the 2018 International Power Electronics Conference (IPEC-Niigata 2018 -ECCE Asia), Niigata, Japan, 20–24 May 2018; pp. 2564–2568. [Google Scholar]
- Chu, S.Y.; Avestruz, A. Electromagnetic Model-Based Foreign Object Detection for Wireless Power Transfer. In Proceedings of the 2019 20th Workshop on Control and Modeling for Power Electronics (COMPEL), Toronto, ON, Canada, 17–20 June 2019; pp. 1–8. [Google Scholar]
- Verghese, S.; Kesler, M.P.; Hall, K.L.; Lou, H.T. Foreign Object Detection in Wireless Energy Transfer Systems. US Patent 9,442,172, 2016. [Google Scholar]
- Rim, C.T.; Mi, C. Foreign Object Detection. In Wireless Power Transfer for Electric Vehicles and Mobile Devices; John Wiley & Sons: Hoboken, NJ, USA, 2017; pp. 457–469. [Google Scholar]
- Jang, G.C.; Jeong, S.Y.; Kwak, H.G.; Rim, C.T. Metal object detection circuit with non-overlapped coils for wireless EV chargers. In Proceedings of the 2016 IEEE 2nd Annual Southern Power Electronics Conference (SPEC), Auckland, New Zealand, 5–8 December 2016; pp. 1–6. [Google Scholar]
- Gan, K.; Zhang, H.; Yao, C.; Lai, X.; Jin, N.; Tang, H. Statistical Model of Foreign Object Detection for Wireless EV Charger. In Proceedings of the 2019 IEEE PELS Workshop on Emerging Technologies: Wireless Power (2019 WoW), London, UK, 18–21 June 2019; pp. 71–74. [Google Scholar]
- Qi, C.; Lin, T.; Wang, Z.; Li, D.; Sun, T. Research on metal object detection of MCR-WPT system that allows transmisson coils to be misaligned. In Proceedings of the IECON 2019—45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; pp. 4642–4647. [Google Scholar]
- Xiang, L.; Zhu, Z.; Tian, J.; Tian, Y. Foreign Object Detection in a Wireless Power Transfer System Using Symmetrical Coil Sets. IEEE Access. 2019, 7, 44622–44631. [Google Scholar] [CrossRef]
- Thai, V.X.; Jang, G.C.; Jeong, S.Y.; Park, J.H.; Kim, Y.; Rim, C.T. Symmetric Sensing Coil Design for the Blind-Zone Free Metal Object Detection of a Stationary Wireless Electric Vehicles Charger. IEEE Trans. Power Electron. 2019, 35, 3466–3477. [Google Scholar] [CrossRef]
- Xinzhi, S.; Chang, Q..; Shuangli, Y. Effects of obstacle sizes on wireless power transfer via magnetic resonance coupling. In Proceedings of the 2015 IEEE PELS Workshop on Emerging Technologies: Wireless Power (2015 WoW), Daejeon, Korea, 5–6 June 2015; 2015; pp. 1–5. [Google Scholar]
- Zhang, P.; Yang, Q.; Zhang, X.; Li, Y.; Li, Y. Comparative study of metal obstacle variations in disturbing wireless power transmission system. IEEE Trans. Magn. 2017, 53, 1–4. [Google Scholar] [CrossRef]
- Bali, R.; Awasthi, U. Effect of a magnetic field on the resistance to blood flow through stenotic artery. Appl. Math. Comput. 2007, 188, 1635–1641. [Google Scholar] [CrossRef]
- Haik, Y.; Pai, V.; Chen, C.J. Apparent viscosity of human blood in a high static magnetic field. J. Magn. Magn. Mater. 2001, 225, 180–186. [Google Scholar] [CrossRef]
- Zhang, W.; White, J.C.; Abraham, A.M.; Mi, C.C. Loosely coupled transformer structure and interoperability study for EV wireless charging systems. IEEE Trans. Power Electron. 2015, 30, 6356–6367. [Google Scholar] [CrossRef]
- Poguntke, T.; Schumann, P.; Ochs, K. Radar-based living object protection for inductive charging of electric vehicles using two-dimensional signal processing. Wirel. Power Transf. 2017, 4, 88–97. [Google Scholar] [CrossRef]
- Strandberg, P.; Tageman, K. Detection of Foreign Objects in Close Proximity to an Inductive Charger. Master’s Thesis, Chalmers University of Technology, Göteborg, Sweden, 2017. [Google Scholar]
- Thai, V.X.; Park, J.H.; Jeong, S.Y.; Rim, C.T. Multiple comb pattern based living object detection with enhanced resolution design for wireless electric vehicle chargers. In Proceedings of the PCIM Europe 2018; International Exhibition and Conference for Power Electronics, Intelligent Motion, Renewable Energy and Energy Management, Nuremberg, Germany, 5–7 June 2018; pp. 1–6. [Google Scholar]
- Chunsen, T.; Lliangliang, Z.; Xin’gang, W.; Bingke, S.; Mingxiang, Z. Foreign objects detection method based on impedance characteristics for EV wireless charging systems. Electr. Eng. 2018, 6, 15. [Google Scholar]
- Aliau-Bonet, C.; Pallas-Areny, R. A fast method to estimate body capacitance to ground at mid frequencies. J. Electr. Bioimpedance 2015, 6, 33–36. [Google Scholar] [CrossRef]
- Aliau-Bonet, C.; Pallas-Areny, R. On the effect of body capacitance to ground in tetrapolar bioimpedance measurements. IEEE Trans. Biomed. Eng. 2012, 59, 3405–3411. [Google Scholar] [CrossRef]
- Lu, F.; Zhang, H.; Hofmann, H.; Mi, C.C. A double-sided LC-compensation circuit for loosely coupled capacitive power transfer. IEEE Trans. Power Electron. 2018, 33, 1633–1643. [Google Scholar] [CrossRef]
- Lu, F. High Power Capacitive Power Transfer for Electric Vehicle Charging Applications. Ph.D. Thesis, University of Michigan, Ann Arbor, MI, USA, 2017. [Google Scholar]
- Mi, C. High power capacitive power transfer for electric vehicle charging applications. In Proceedings of the 2015 6th International Conference on Power Electronics Systems and Applications (PESA), Hong Kong, China, 15–17 December 2015; pp. 1–4. [Google Scholar]
- Lu, F.; Zhang, H.; Mi, C. A review on the recent development of capacitive wireless power transfer technology. Energies 2017, 10, 1752. [Google Scholar] [CrossRef]
- Jeong, C.; La, P.; Choi, S.; Choi, H. A novel target detection algorithm for capacitive power transfer systems. In Proceedings of the 2018 IEEE Applied Power Electronics Conference and Exposition (APEC), San Antonio, TX, USA, 4–8 March 2018; pp. 3174–3177. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MOD Method | Sensor | Detection Parameter | ||
|---|---|---|---|---|
| Mechanical and thermal methods | Light sensor, image processing, temperature sensor, radar/sonar sensor | Size, shape [66,67], Temperature [68,69], Distance [66,70] | ||
| Electromagnetic methods | Without additional circuit | Main WPT system | Impedance [72], current, voltage [73,74], phase shift [75], resonant frequency [56,77,78], Q factor [79], power loss [80], transmission efficiency [55] | |
| With additional circuit | Active detection | Detection coil with a power source | Coil impedance [83,84], Coil transferred power [74] | |
| Passive detection | Detection coil without a power source, tunable magnetoresistive (TMR) sensor | Changed electromagnetic field (EMF) [57,58,59,60,85,86,87,88,89,90,91,92] | ||
| LOD Method | Sensor | Detection Parameter | |
|---|---|---|---|
| Mechanical and thermal methods | Light sensor, image processing, temperature sensor, radar/sonar sensor | Size, shape, [66,67] temperature [66,68], distance [66,70,98,99] | |
| Electromagnetic methods | Without additional circuit | Main WPT system | Drain voltage deviation of the power switches [74] |
| With additional circuit | Detecting capacitor, detection coil | Impedance deviation [62,69,100,101] | |
| Detection Method | Advantages | Disadvantages | ||
|---|---|---|---|---|
| Mechanical and thermal methods | Independent of the WPT system and foreign object type | High cost, requires additional space, affected by the environment | ||
| Electromagnetic methods | Without additional circuit | No extra equipment, cost-effective, easy to implement | Low sensitivity, affected by misalignment and the load condition | |
| With additional circuit | Active detection | Relatively high sensitivity, easy to mount | Requires an extra driven circuit, requires signal-processing circuit | |
| Passive detection | Needs signal-processing circuit | |||
| Detection Method | MOD | LOD | Before Charging | During Charging | ||
|---|---|---|---|---|---|---|
| Mechanical and thermal methods | ✓ | ✓ | ✓ | ✓ | ||
| Electromagnetic methods | Without additional circuit | Drain waveform deviation of the power switches [74] | ✓ | ✓ | ✕ | ✓ |
| Resonance frequency deviation [56] | ✓ | ✕ | ✓ | ✓ | ||
| Others detection methods | ✓ | ✕ | ✕ | ✓ | ||
| With additional circuit | Active detection | ✓ | ✓ | ✓ | ✓ | |
| Passive detection | ✓ | ✕ | ✕ | ✓ | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xia, J.; Yuan, X.; Li, J.; Lu, S.; Cui, X.; Li, S.; Fernández-Ramírez, L.M. Foreign Object Detection for Electric Vehicle Wireless Charging. Electronics 2020, 9, 805. https://doi.org/10.3390/electronics9050805
Xia J, Yuan X, Li J, Lu S, Cui X, Li S, Fernández-Ramírez LM. Foreign Object Detection for Electric Vehicle Wireless Charging. Electronics. 2020; 9(5):805. https://doi.org/10.3390/electronics9050805
Chicago/Turabian StyleXia, Jinglin, Xinmei Yuan, Jun Li, Sizhao Lu, Xinxu Cui, Siqi Li, and Luis M. Fernández-Ramírez. 2020. "Foreign Object Detection for Electric Vehicle Wireless Charging" Electronics 9, no. 5: 805. https://doi.org/10.3390/electronics9050805
APA StyleXia, J., Yuan, X., Li, J., Lu, S., Cui, X., Li, S., & Fernández-Ramírez, L. M. (2020). Foreign Object Detection for Electric Vehicle Wireless Charging. Electronics, 9(5), 805. https://doi.org/10.3390/electronics9050805