Joint Design and Performance Analysis of a Full-Duplex UAV Legitimate Surveillance System


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- We propose a full-duplex UAV monitor scheme which is different from [18], where a Rayleigh channel is adopted to characterize all channels. An LoS link with a certain probability is adopted for the ground-UAV-channel model.
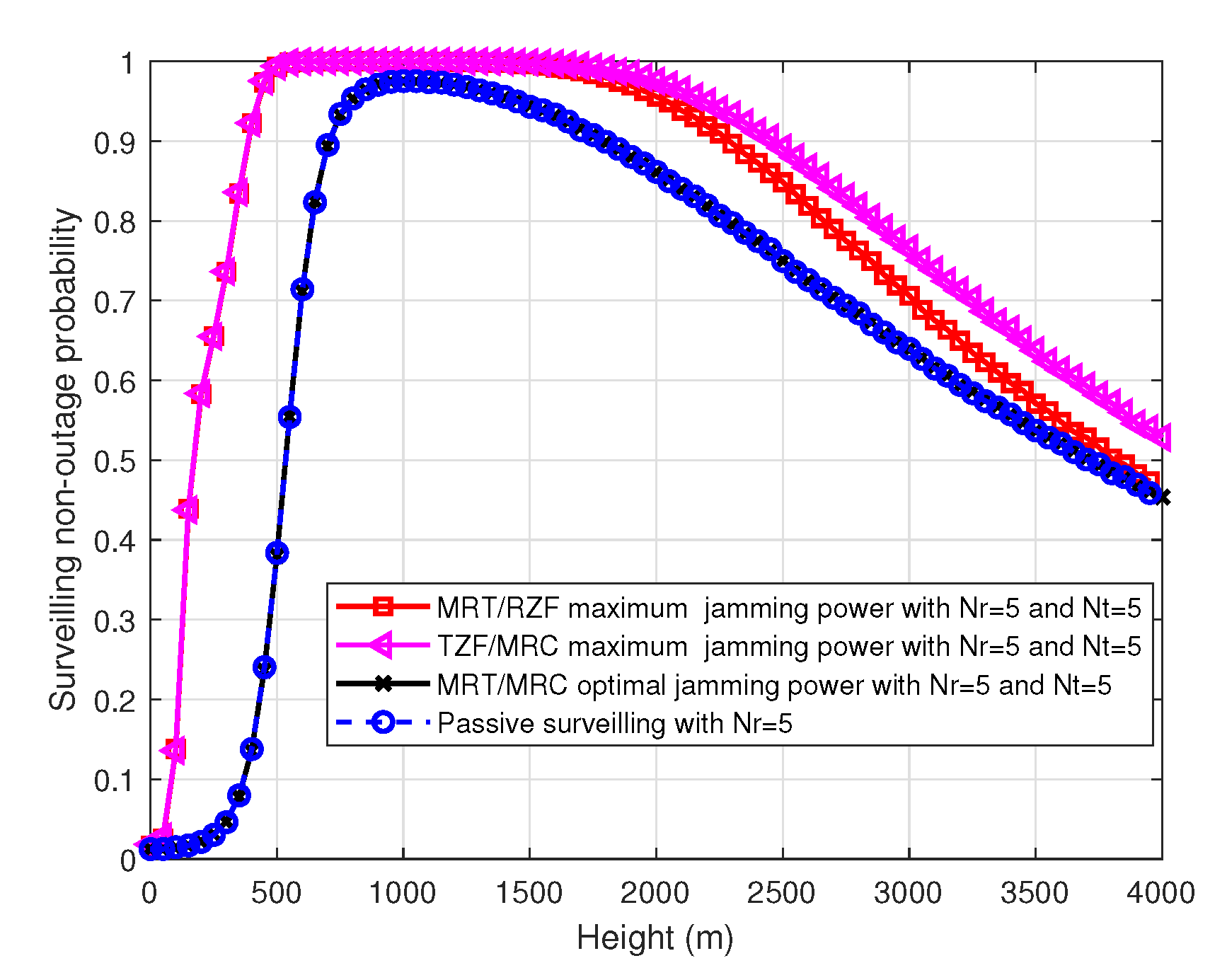
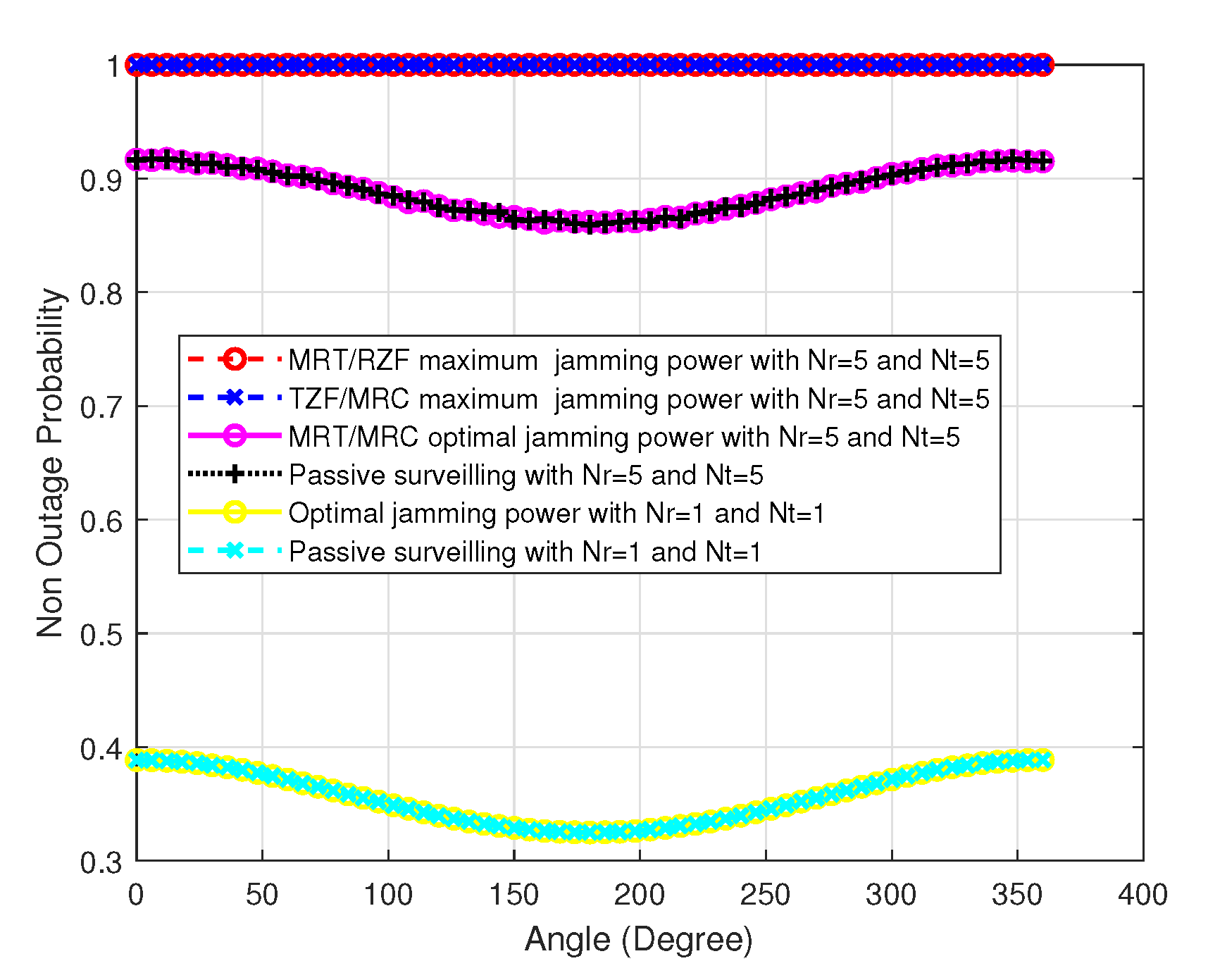
- The surveilling non-outage probability for single-input single-output (SISO) and multiple-input multiple-output (MIMO) UAV with transmit zero-forcing (TZF)/maximum ratio combing (MRC), maximum ratio transmission (MRT)/receive zero-forcing (RZF), and maximum ratio transmission (MRT)/ maximum ratio combing (MRC) is derived.
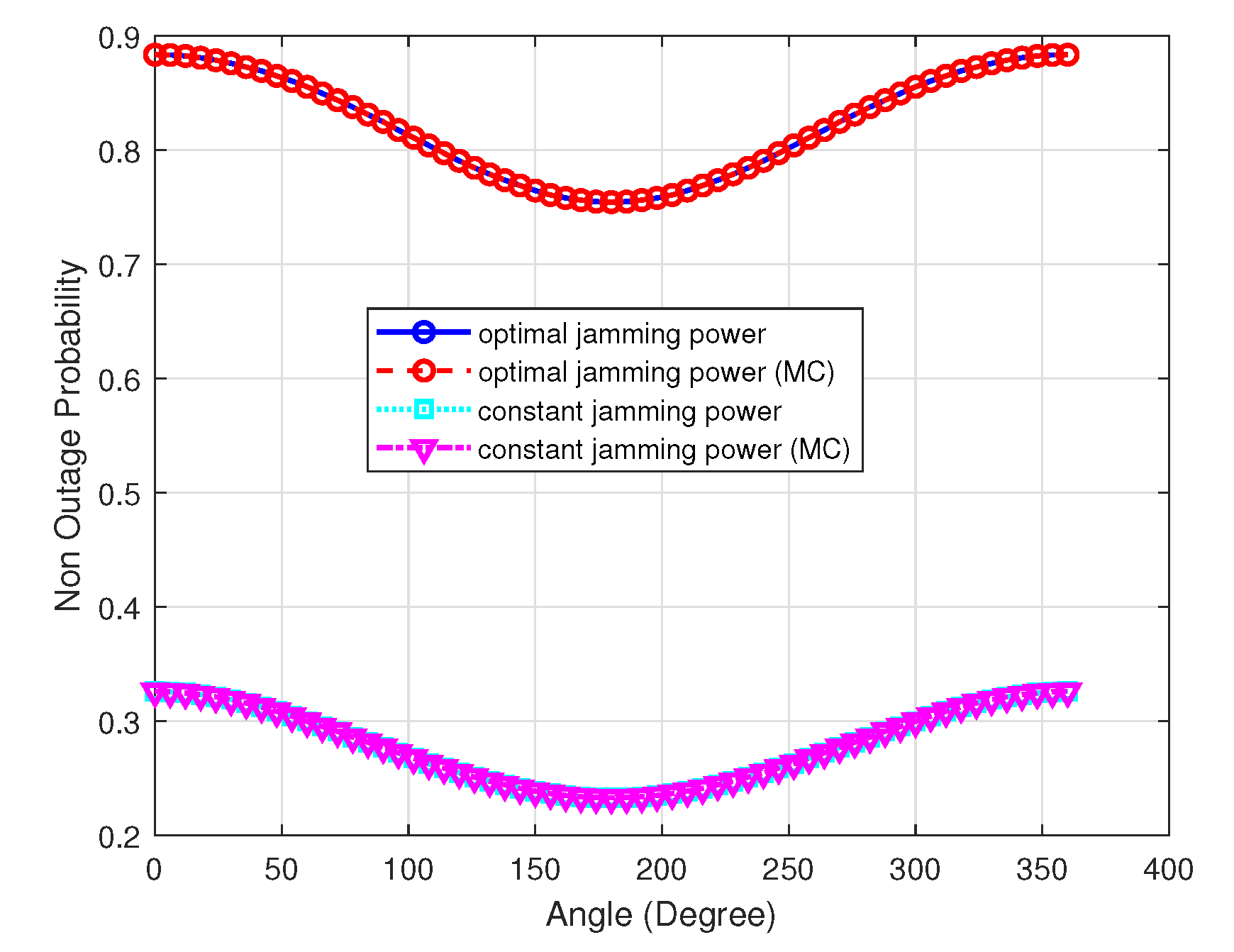
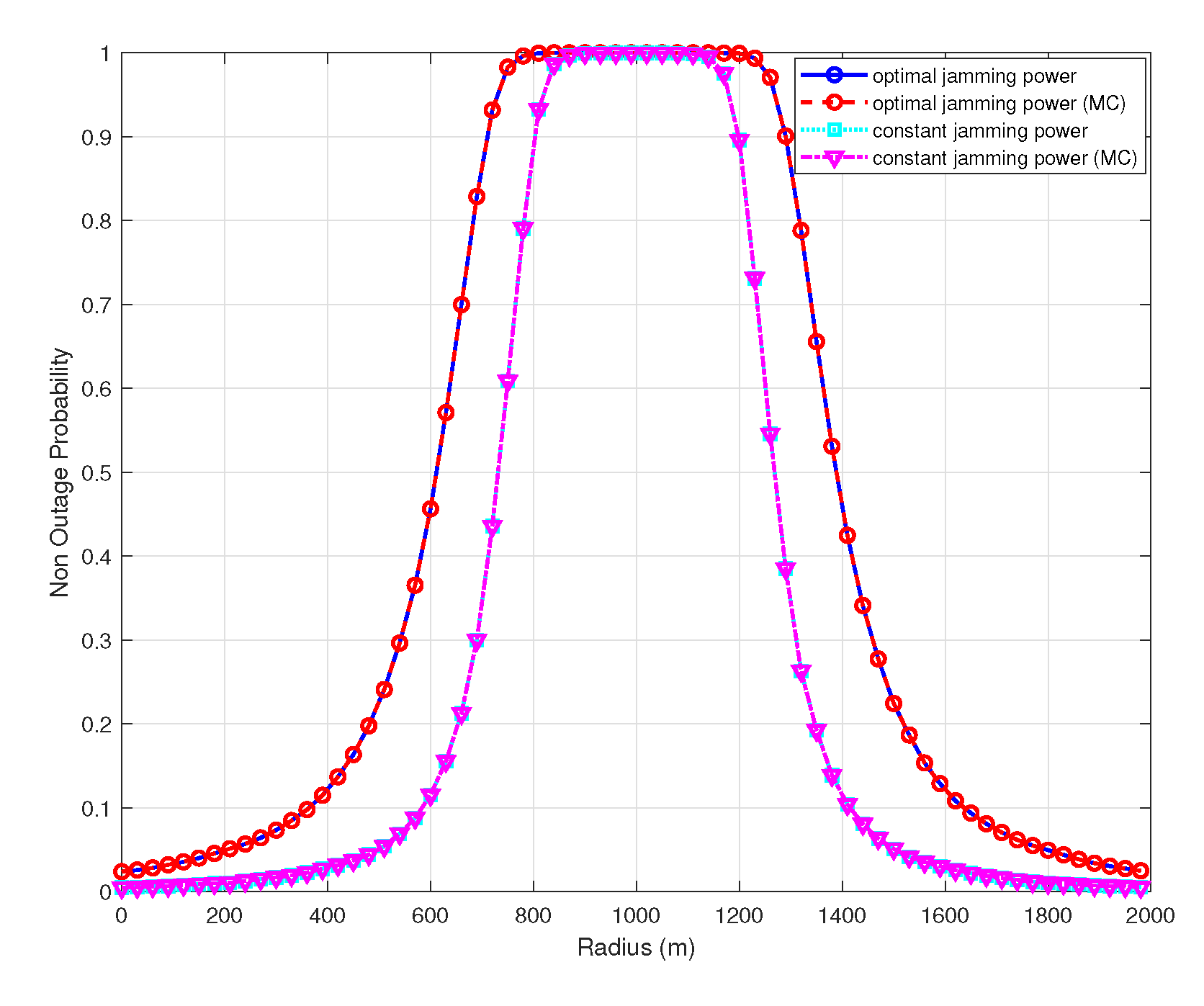
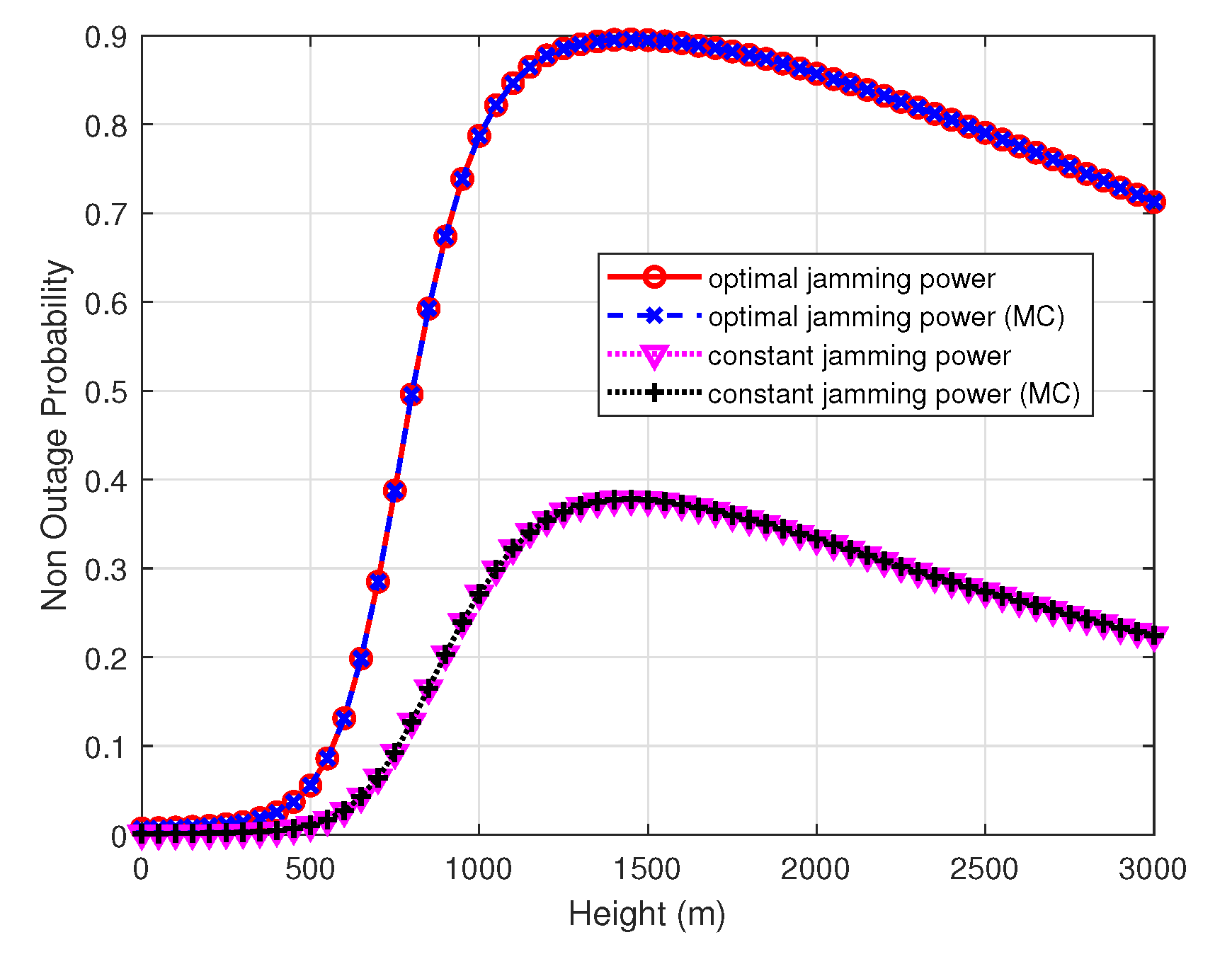
- Optimal jamming power and 3D location of the UAV monitor that maximize the surveilling non-outage probability of the UAV monitor are determined, and the impacts of the antenna number/angle/radius/height, as well as the distance of the suspicious link, on the surveilling non-outage probability are analyzed.
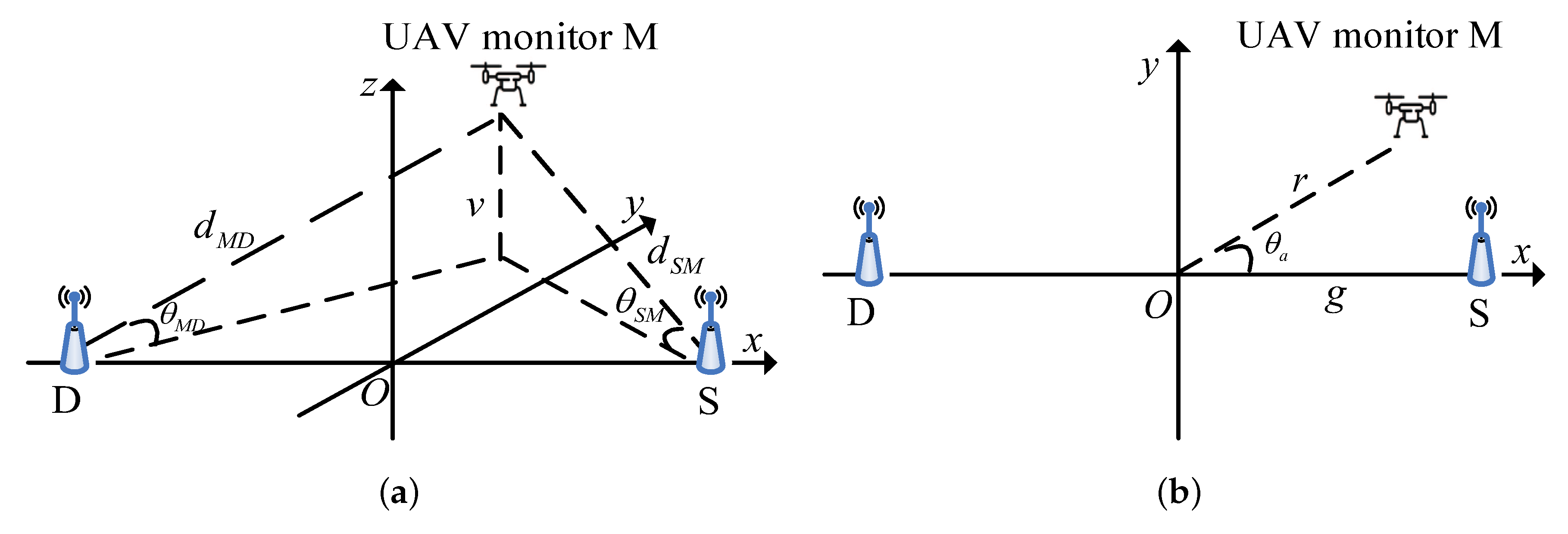
2. System Model and Problem Formulation
3. Jamming Power Optimization and Performance Analysis
3.1. SISO UAV
3.2. MIMO UAV
3.2.1. TZF/MRC
3.2.2. MRT/RZF
3.2.3. MRT/ MRC
4. Numerical and Simulation Results
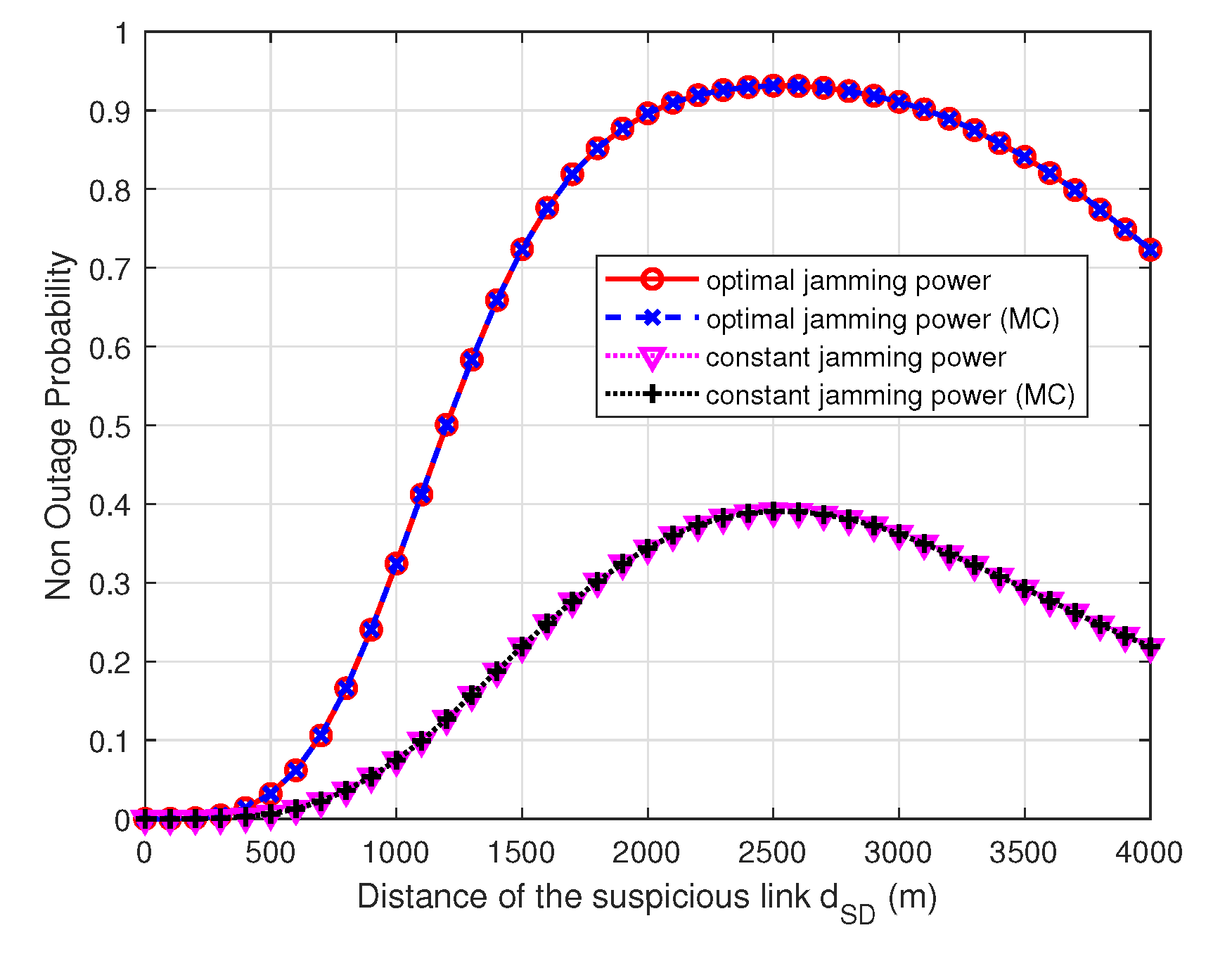
4.1. SISO UAV
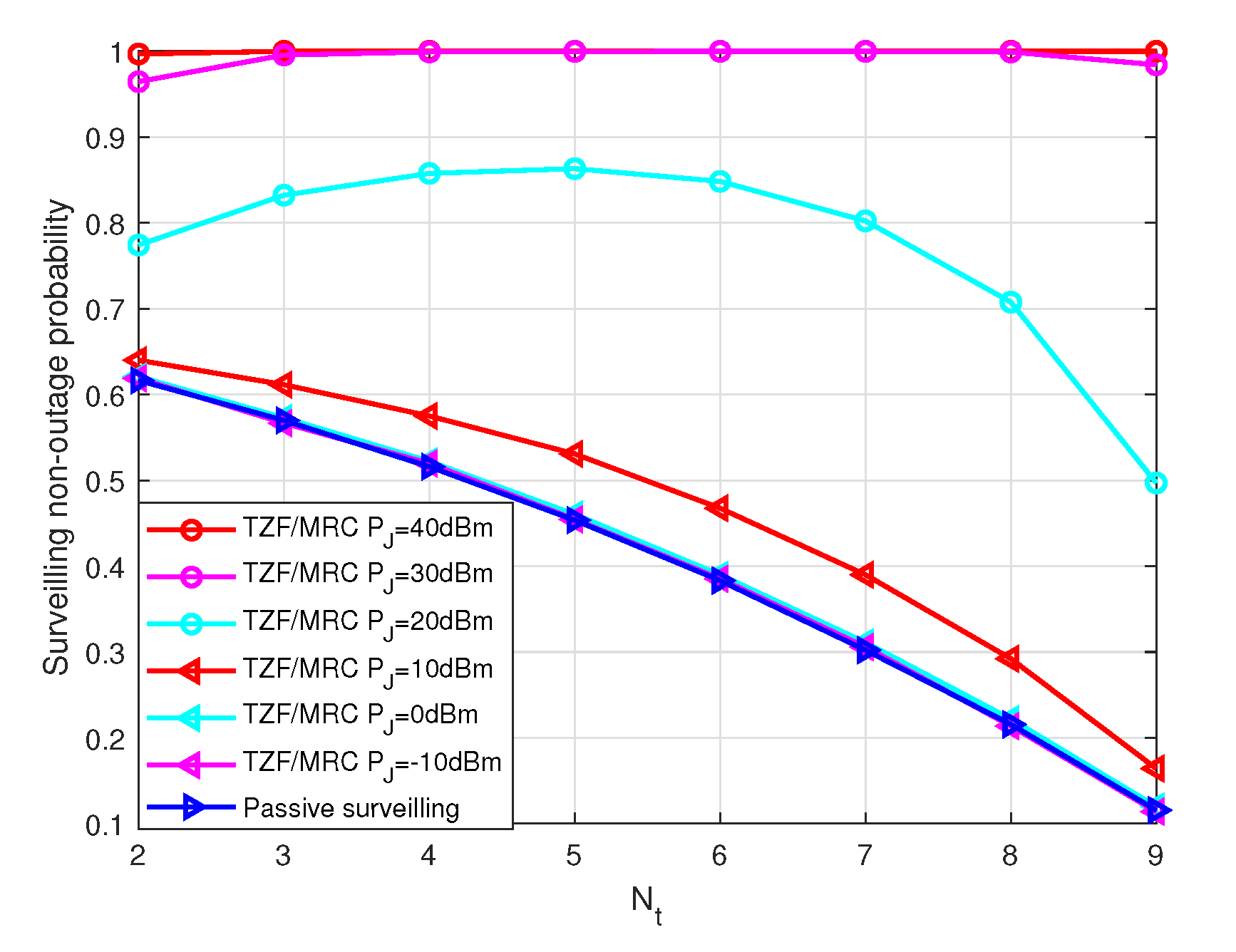
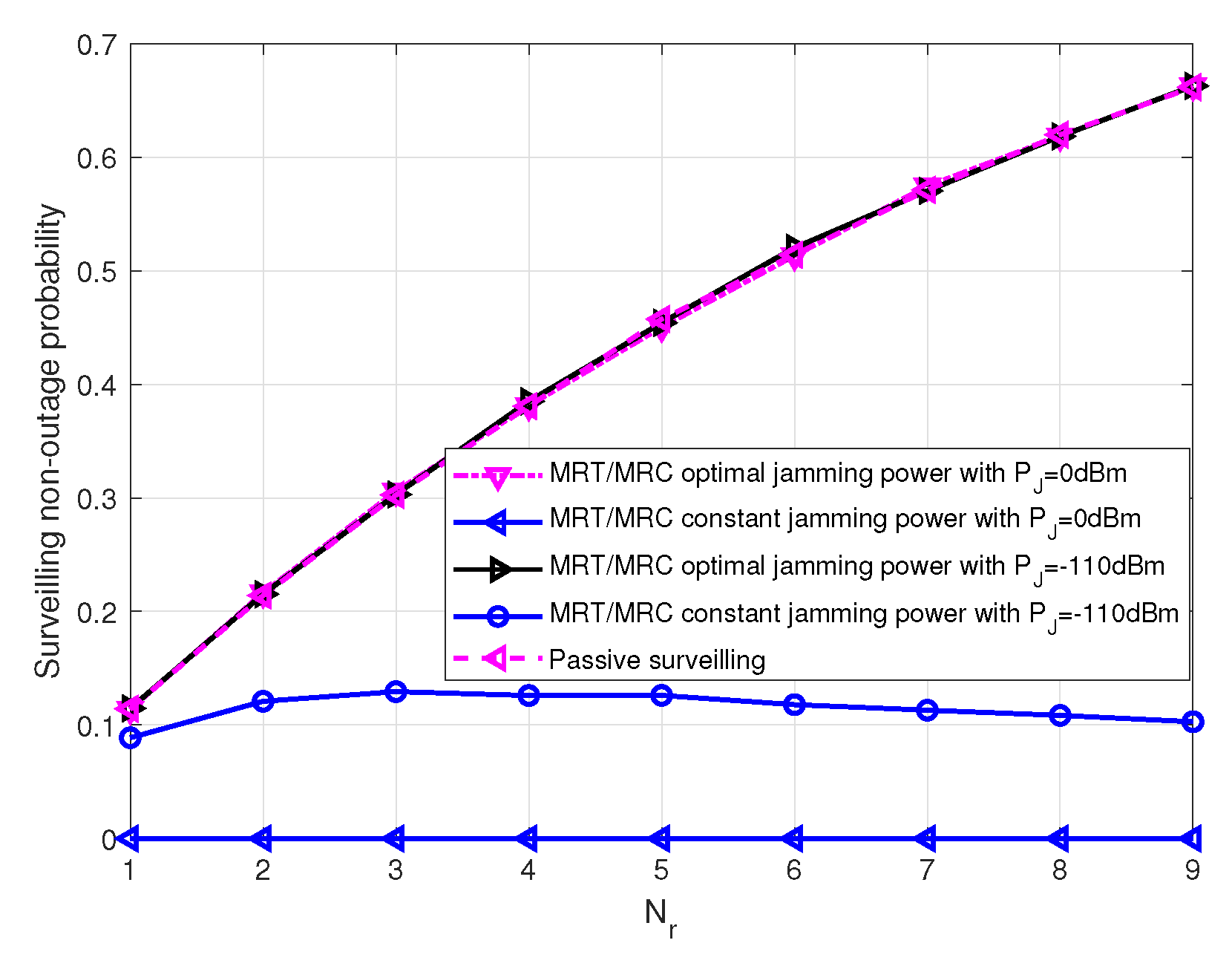
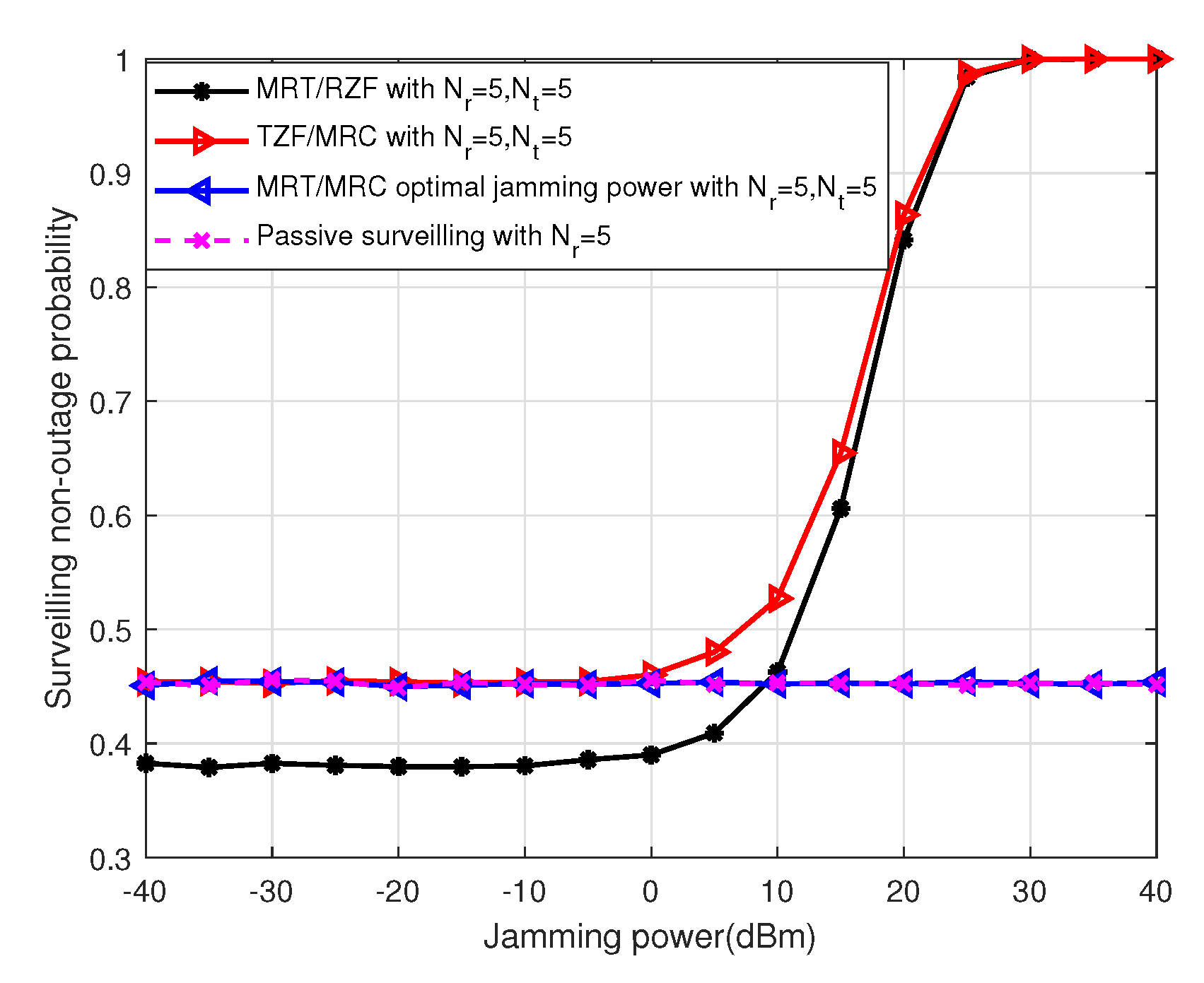
4.2. MIMO UAV
5. Discussion
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B
Appendix C
References
- Zhang, G.; Wu, Q.; Cui, M.; Zhang, R. Securing UAV communications via joint trajectory and power control. IEEE Trans. Wirel. Commun. 2019, 18, 1376–1389. [Google Scholar] [CrossRef]
- Cui, M.; Zhang, G.; Wu, Q.; Ng, D.W.K. Robust trajectory and transmit power design for secure UAV communications. IEEE Trans. Veh. Technol. 2018, 67, 9042–9046. [Google Scholar] [CrossRef]
- Zhu, Y.; Zheng, G.; Fitch, M. Secrecy rate analysis of UAV-enabled mm Wave networks using matern hardcore point processes. IEEE J. Sel. Areas Commun. 2018, 36, 1397–1409. [Google Scholar] [CrossRef]
- Liu, C.; Quek, T.Q.S.; Lee, J. Secure UAV communication in the presence of active eavesdropper. In Proceedings of the 9th International Conference on Wireless Communications and Signal Processing (WCSP), Nanjing, China, 11–13 October 2017; pp. 1–6. [Google Scholar]
- Zeng, Y.; Zhang, R. Energy-efficient UAV communication with trajectory optimization. IEEE Trans. Wirel. Commun. 2017, 16, 3747–3760. [Google Scholar] [CrossRef]
- Wang, H.; Chen, J.; Ding, G.; Sun, J. Trajectory planning in UAV communication with jamming. In Proceedings of the 10th International Conference on Wireless Communications and Signal Processing (WCSP), Hangzhou, China, 18–20 October 2018; pp. 1–6. [Google Scholar]
- Wang, Q.; Chen, Z.; Mei, W.; Fang, J. Improving physical layer security using UAV-enabled mobile relaying. IEEE Wirel. Commun. Lett. 2017, 6, 310–313. [Google Scholar] [CrossRef]
- Wang, Q.; Chen, Z.; Li, H.; Li, S. Joint power and trajectory design for physical-layer secrecy in the UAV-aided mobile relaying system. IEEE Access 2018, 6, 62849–62855. [Google Scholar] [CrossRef]
- Liu, H.; Yoo, S.; Kwak, K.S. Opportunistic relaying for low-altitude UAV swarm secure communications with multiple eavesdroppers. J. Commun. Netw. 2018, 20, 496–508. [Google Scholar] [CrossRef]
- Li, A.; Wu, Q.; Zhang, R. UAV-enabled cooperative jamming for improving secrecy of ground wiretap channel. IEEE Wirel. Commun. Lett. 2019, 8, 181–184. [Google Scholar] [CrossRef]
- Zhou, Y.; Yeoh, P.L.; Chen, H.; Li, Y.; Schober, R.; Zhuo, L.; Vucetic, B. Improving physical layer security via a UAV friendly jammer for unknown eavesdropper location. IEEE Trans. Veh. Technol. 2018, 67, 11280–11284. [Google Scholar] [CrossRef]
- Xu, J.; Duan, L.; Zhang, R. Proactive surveilling via cognitive jamming in fading channels. IEEE Trans. Wirel. Commun. 2017, 16, 2790–2806. [Google Scholar] [CrossRef]
- Xu, J.; Duan, L.; Zhang, R. Proactive surveilling via jamming for rate maximization over Rayleigh fading channels. IEEE Wirel. Commun. Lett. 2016, 5, 80–83. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R. Wireless information surveillance via proactive surveilling with spoofing relay. IEEE J. Sel. Top. Signal Process. 2016, 10, 1449–1461. [Google Scholar] [CrossRef]
- Zhong, C.; Jiang, X.; Qu, F.; Zhang, Z. Multi-antenna wireless legitimate surveillance systems: Design and performance analysis. IEEE Trans. Wirel. Commun. 2017, 16, 4585–4599. [Google Scholar] [CrossRef]
- Hayat, S.; Yanmaz, E.; Muzaffar, R. Survey on unmanned aerial vehicle networks for civil applications: A communications viewpoint. IEEE Commun. Surv. Tuts. 2016, 18, 2624–2661. [Google Scholar] [CrossRef]
- Li, K.; Voicu, R.C.; Kanhere, S.S.; Ni, W.; Tovar, E. Energy efficient legitimate wireless surveillance of UAV communications. IEEE Trans.Veh. Technol. 2019, 68, 2283–2293. [Google Scholar] [CrossRef]
- Hu, D.; Zhang, Q.; Li, Q.; Qin, J. Proactive Unmanned Aerial Vehicle Surveilling via Jamming in Decode-and-Forward Relay Networks. IEEE Access 2019, 7, 90465–90475. [Google Scholar] [CrossRef]
- Hu, G.; Cai, Y. UAVs-Assisted Proactive Eavesdropping in AF Multi-Relay System. IEEE Commun. Lett. 2019, 1, 1089–7798. [Google Scholar] [CrossRef]
- Zhang, M.; Yi, H.; Chen, Y.; Tao, X. Proactive Eavesdropping Via Jamming for Power-Limited UAV Communications. In Proceedings of the IEEE International Conference on CommunicationsWorkshops (ICC Workshops), Shanghai, China, 20–24 May 2019. [Google Scholar]
- Zhang, M.; Chen, Y.; Tao, X.; Darwazeh, I. Power Allocation for Proactive Eavesdropping withSpoofing Relay in UAV Systems. In Proceedings of the 26th International Conference on Telecommunications (ICT), Hanoi, Vietnam, 8–10 April 2019; pp. 8–10. [Google Scholar]
- Song, Q.; Zheng, F.-C.; Zeng, Y.; Zhang, J. Joint beamforming and power allocation for UAV-enabled full-duplex relay. IEEE Trans. Veh. Technol. 2019, 68, 1657–1671. [Google Scholar] [CrossRef]
- Zheng, G.; Krikidis, I.; Li, J.; Petropulu, A.P.; Ottersten, B. Improving physical layer secrecy using full-duplex jamming receivers. IEEE Trans. Signal Process. 2013, 61, 4962–4974. [Google Scholar] [CrossRef]
- Matolak, D.W.; Sun, R. Unmanned aircraft systems: Air-ground channel characterization for future applications. IEEE Veh. Technol. Mag. 2015, 10, 79–85. [Google Scholar] [CrossRef]
- Azari, M.M.; Rosas, F.; Chen, K.C.; Pollin, S. Ultra reliable UAV communication using altitude and cooperation diversity. IEEE Trans. Commun. 2018, 66, 330–344. [Google Scholar] [CrossRef]
- Mohammadi, M.; Chalise, B.K.; Suraweera, H.A.; Zhong, C.; Zheng, G.; Krikidis, I. Throughput analysis and optimization of wireless-powered multiple antenna full-duplex relay systems. IEEE Trans. Commun. 2016, 64, 1769–1785. [Google Scholar] [CrossRef]
- Available online: https://www.sohu.com/a/293811994$_$175233 (accessed on 9 February 2019).
- Gradshteyn, I.S.; Ryzhik, I.M. Table of Integrals, Series, and Products, 6th ed.; Academic: San Diego, CA, USA, 2000. [Google Scholar]











© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, Y.; Pan, Z.; Liu, N.; You, X. Joint Design and Performance Analysis of a Full-Duplex UAV Legitimate Surveillance System. Electronics 2020, 9, 407. https://doi.org/10.3390/electronics9030407
Shen Y, Pan Z, Liu N, You X. Joint Design and Performance Analysis of a Full-Duplex UAV Legitimate Surveillance System. Electronics. 2020; 9(3):407. https://doi.org/10.3390/electronics9030407
Chicago/Turabian StyleShen, Yi, Zhiwen Pan, Nan Liu, and Xiaohu You. 2020. "Joint Design and Performance Analysis of a Full-Duplex UAV Legitimate Surveillance System" Electronics 9, no. 3: 407. https://doi.org/10.3390/electronics9030407
APA StyleShen, Y., Pan, Z., Liu, N., & You, X. (2020). Joint Design and Performance Analysis of a Full-Duplex UAV Legitimate Surveillance System. Electronics, 9(3), 407. https://doi.org/10.3390/electronics9030407