Reconfigurable Power Converter for Constant Current Underwater Observatory



Abstract
:1. Introduction
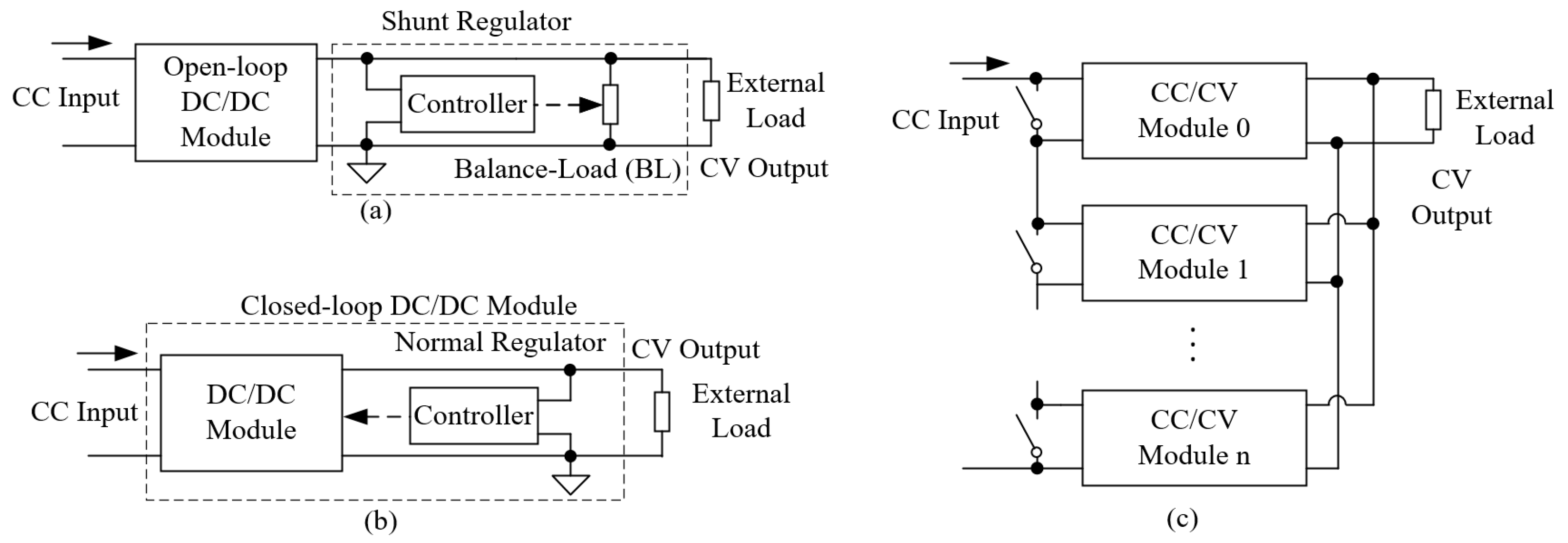
2. Reconfigurable CC/CV Converter
2.1. Overall Description
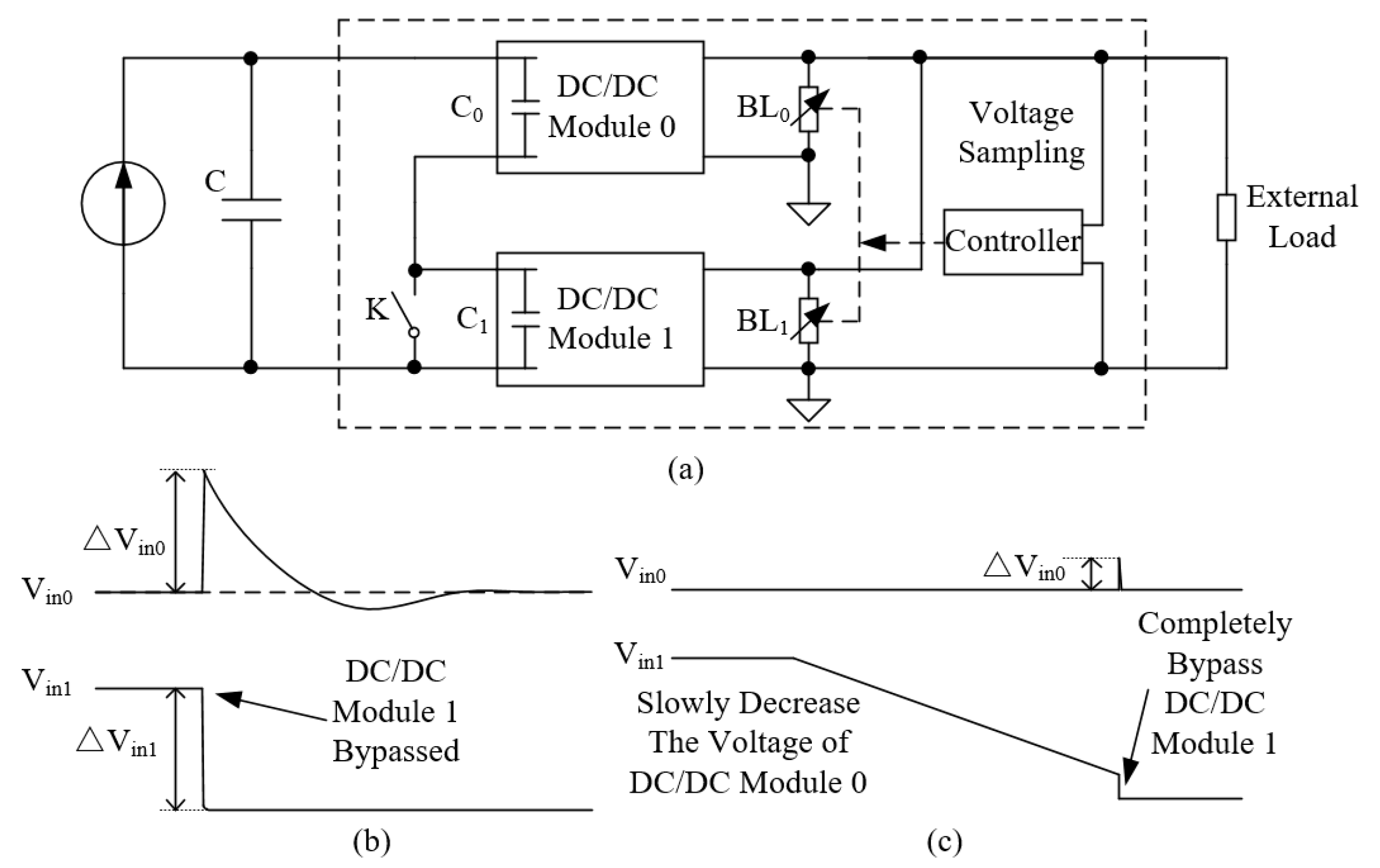
2.2. Active Soft Bypass and Reset Method
2.3. Priority-Based Power Management Strategy
2.4. The Link between ASB and PPMS
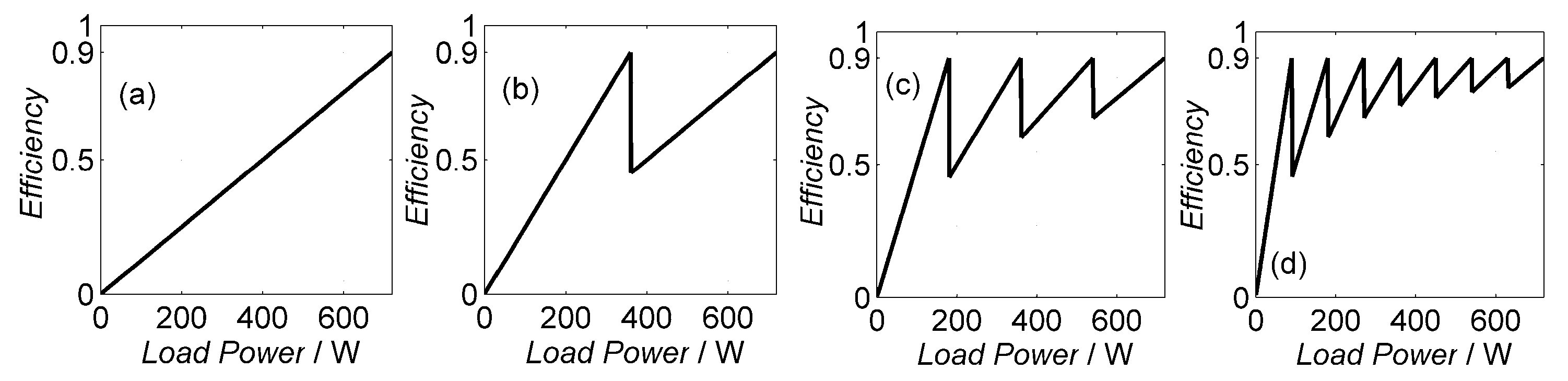
2.5. Efficiency Analysis
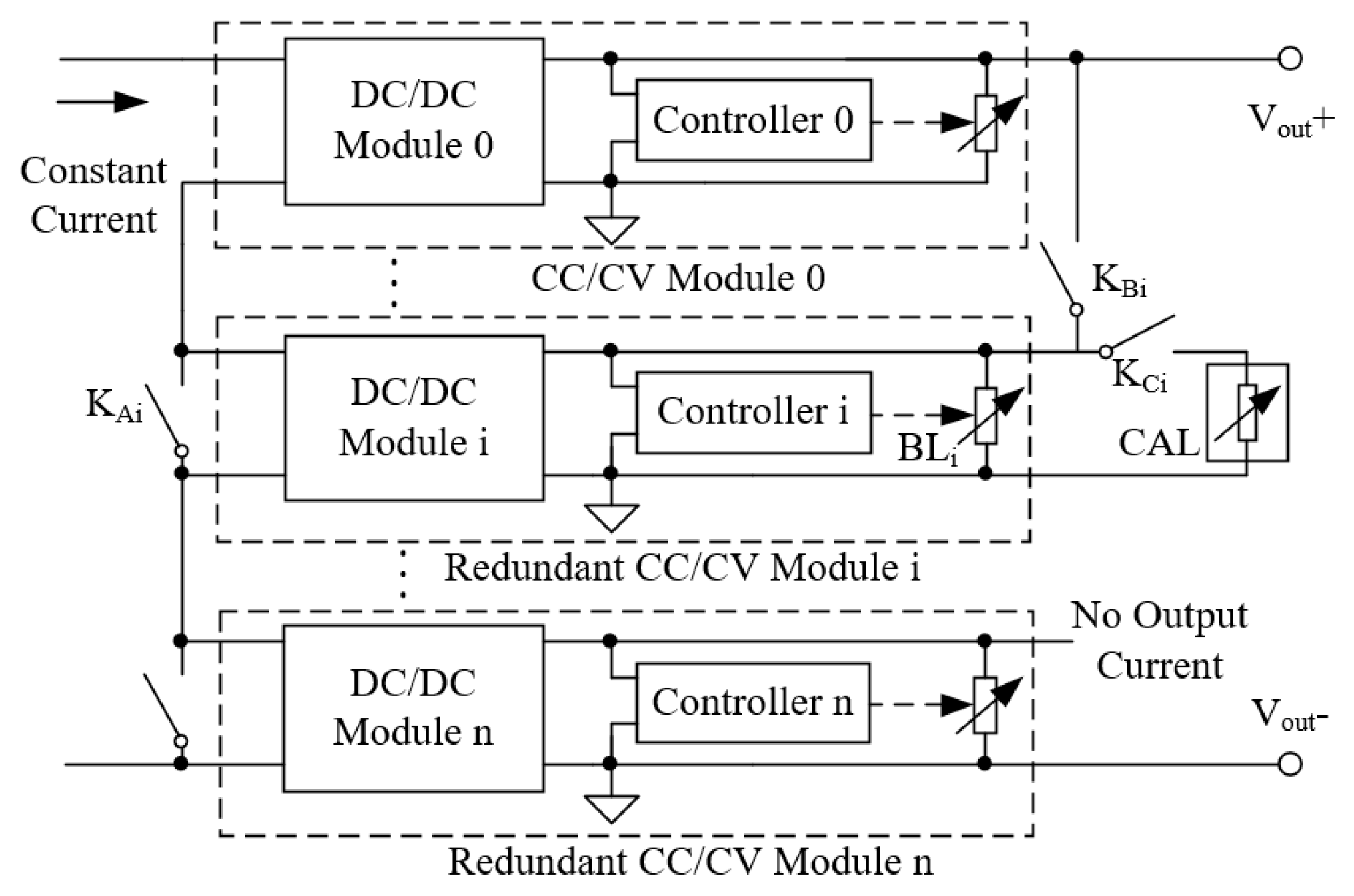
3. Implement of ASB and PPMS
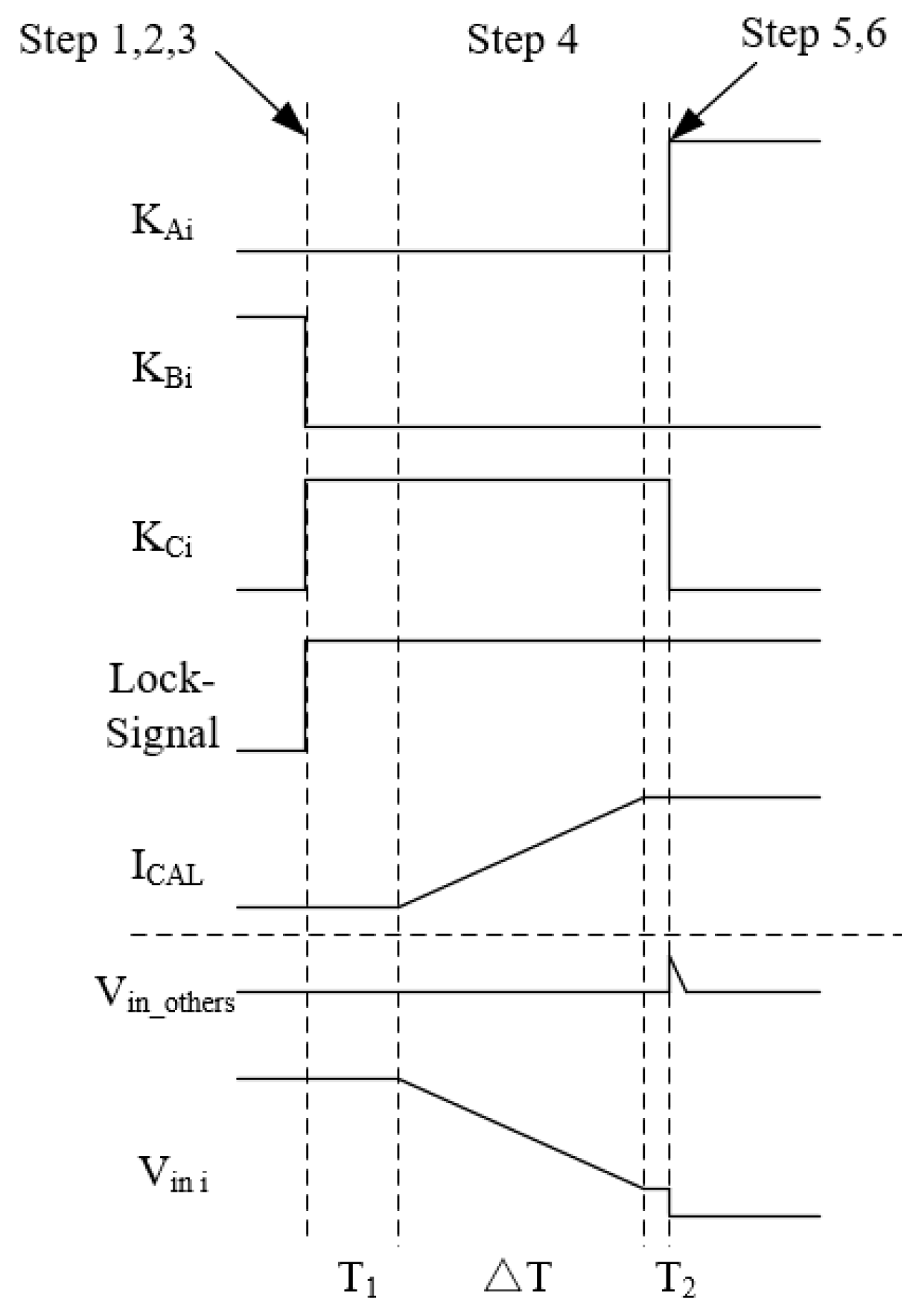
3.1. Time Sequence of ASB
- Open KBi to switch module i off from external load bus;
- Disable the controller i by validating the lock-signal, so that BLi is locked at a fixed resistance;
- Close KCi to switch module i onto the CAL;
- Slowly reduce the resistance of the CAL, in turn, increase its current via control;
- Close KAi to bypass the module i while its input voltage descends to a very low value;
- Open KCi to isolate module i from the CAL.
3.2. The Realization of PPMS
4. Simulations and Experiments
4.1. Prototype Parameters
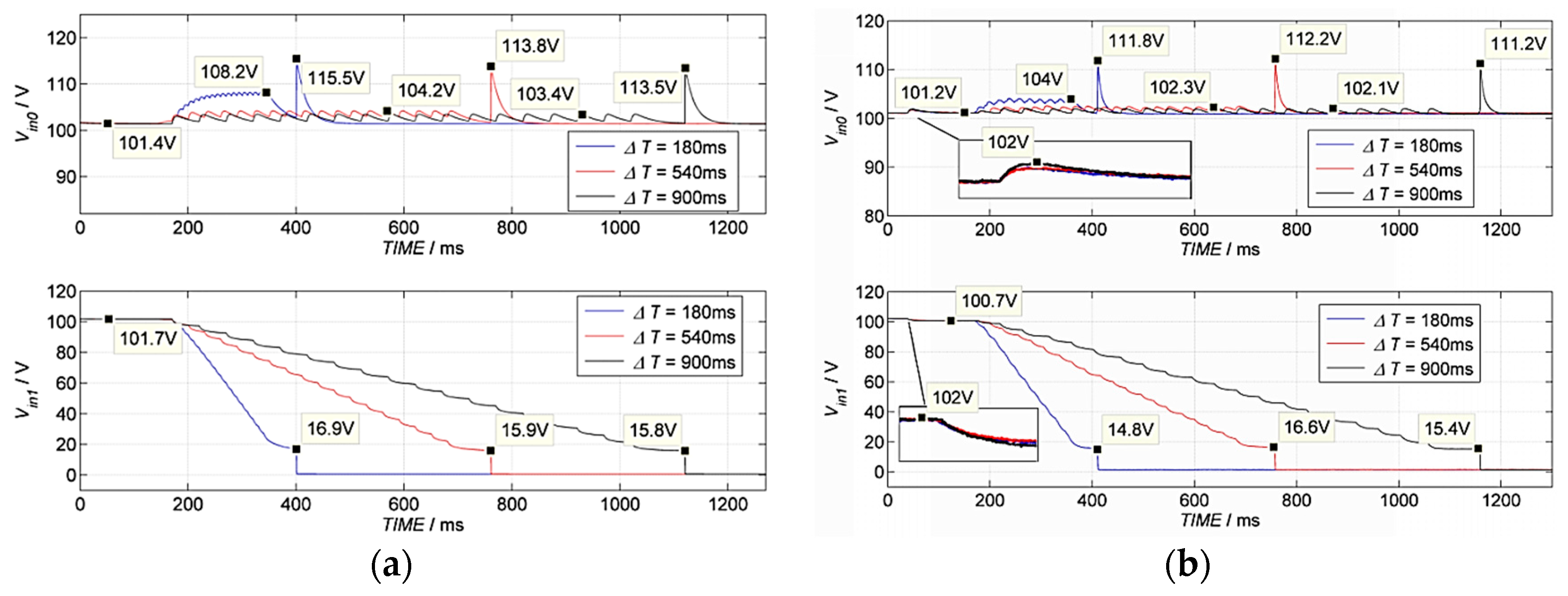
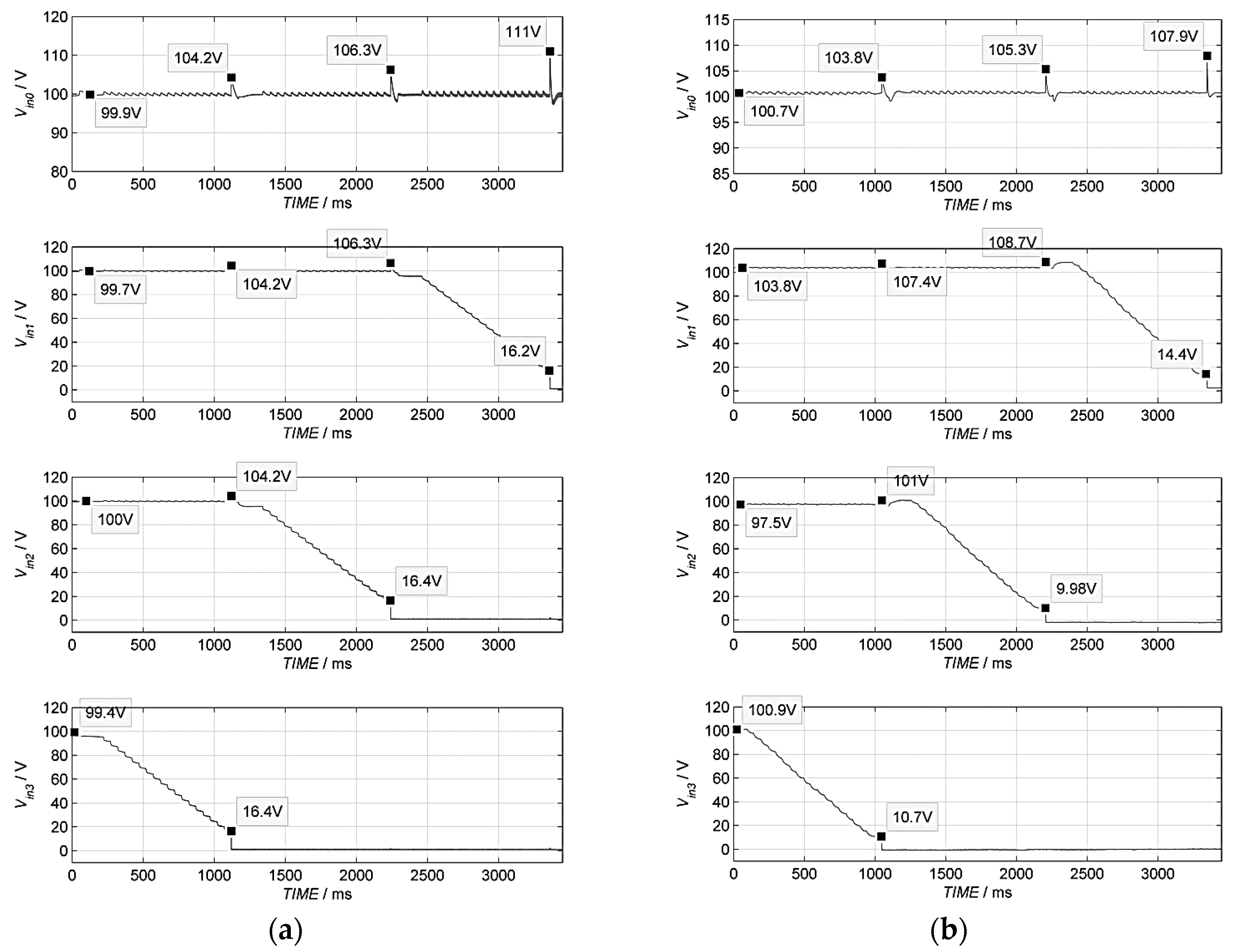
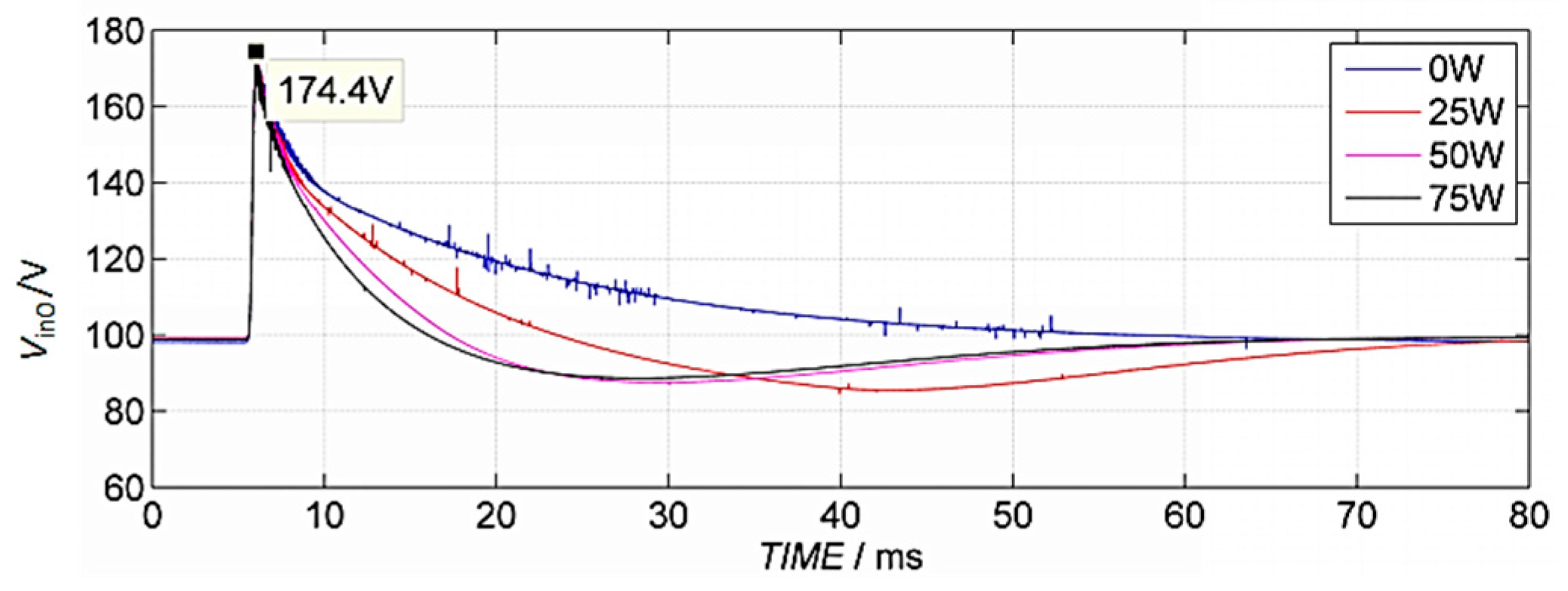
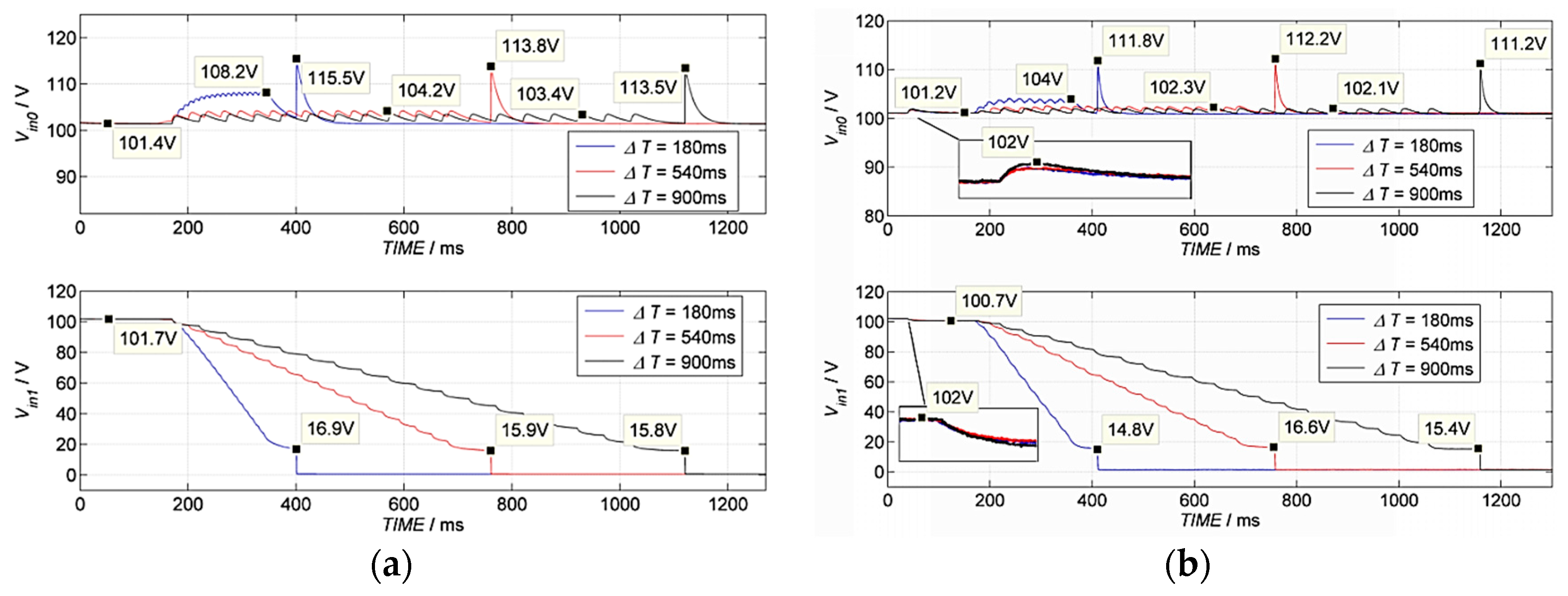
4.2. Simulated and Experimental Results of ASB
4.3. Efficiency Validation
4.4. Sea Trial
5. Conclusions
- The converter inherits the high stability of the shunt regulation method but overcomes the low-efficiency problem to a certain extent,
- It overcomes the problem of low reliability of the typical multi-module-stack structure with the ASB and PPMS applied.
- Compared with the typical multi-module-stack method, each module in the proposed architecture needs a corresponding closed switch, which may affect the efficiency to some extent.
- Although the architecture is reliable because of the well-suppressed transient voltage, the converter will be very complex when there are a great number of stacked modules, which may in turn affect the reliability of the converter. Hence, the number of modules should not be too large.
- Due to the adoption of the PPMS, the output voltage changes as a ladder-type-distribution with the load power. This also limits the number of stacked modules.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Chave, A.D.; Waterworth, G.; Maffei, A.R.; Massion, G. Cabled Ocean Observatory Systems. Mar. Technol. Soc. J. 2004, 38, 30–43. [Google Scholar] [CrossRef]
- Chen, Y.; Yang, C.; Li, D.; Jin, B.; Chen, Y. Design and Application of a Junction Box for Cabled Ocean Observatories. Mar. Technol. Soc. J. 2012, 46, 50–63. [Google Scholar] [CrossRef]
- Kojima, J.; Howe, B.M.; Asakawa, K.; Kirkham, H. Power systems for ocean regional cabled observatories. In Proceedings of the Oceans ’04 MTS/IEEE Techno-Ocean ’04 (IEEE Cat. No.04CH37600), Kobe, Japan, 9–12 November 2005; Volume 4, pp. 2176–2181. [Google Scholar]
- Howe, B.M.; Kirkham, H.; Vorpérian, V. Power system considerations for undersea observatories. IEEE J. Ocean. Eng. 2002, 27, 267–274. [Google Scholar] [CrossRef]
- Asakawa, K.; Kojima, J.; Muramatsu, J.; Takada, T.; Kawaguchi, K.; Mikada, H. Current-to-current converter for scientific underwater cable networks. IEEE J. Ocean. Eng. 2007, 32, 584–592. [Google Scholar] [CrossRef]
- Duennebier, F.K.; Harris, D.W.; Jolly, J.; Caplan-Auerbach, J.; Jordan, R.; Copson, D.; Stiffel, K.; Babinec, J.; Bosel, J. HUGO: The Hawaii Undersea Geo-Observatory. IEEE J. Ocean. Eng. 2002, 27, 218–227. [Google Scholar] [CrossRef]
- Petitt, R.A.; Harris, D.W.; Wooding, B.; Bailey, J.; Jolly, J.; Hobart, E.; Chave, A.D.; Duennebier, F.; Butler, R.; Bowen, A.; et al. The Hawaii-2 Observatory. IEEE J. Ocean. Eng. 2002, 27, 245–253. [Google Scholar] [CrossRef]
- Butler, R. The Hawaii-2 Observatory: Observation of Nanoearthquakes. Seismol. Res. Lett. 2003, 74, 290–297. [Google Scholar] [CrossRef]
- Howe, B.M.; Lukas, R.; Duennebier, F.; Karl, D. ALOHA cabled observatory installation. In Proceedings of the OCEANS’11 MTS/IEEE KONA, Waikoloa, HI, USA, 19–22 September 2011; pp. 1–11. [Google Scholar]
- Kawaguchi, K.; Kaneda, Y.; Araki, E. The DONET: A real-time seafloor research infrastructure for the precise earthquake and tsunami monitoring. In Proceedings of the OCEANS 2008—MTS/IEEE Kobe Techno-Ocean, Kobe, Japan, 8–11 April 2008; pp. 1–4. [Google Scholar]
- Hishiki, K.; Fujiwara, N.; Katayama, T.; Mizukawa, T.; Kawaguchi, K.; Yokobiki, T. Power distribution system for multidisciplinary seafloor observatory junction box. In Proceedings of the 2016 Techno-Ocean (Techno-Ocean), Kobe, Japan, 6–8 October 2016; pp. 325–328. [Google Scholar]
- Choi, J.K.; Yokobiki, T.; Kawaguchi, K. ROV-Based Automated Cable-Laying System: Application to DONET2 Installation. IEEE J. Ocean. Eng. 2018, 43, 665–676. [Google Scholar] [CrossRef]
- Kawaguchi, K.; Araki, E.; Kogure, Y.; Takahashi, N.; Katayama, T.; Hishiki, K.; Fujiwara, N.; Iida, N.; Kaneda, Y. Development of DONET2-Off Kii chanel observatory network. In Proceedings of the 2013 IEEE International Underwater Technology Symposium (UT), Tokyo, Japan, 5–8 March 2013; pp. 1–5. [Google Scholar]
- Hsiao, N.-C.; Lin, T.-W.; Hsu, S.-K.; Kuo, K.-W.; Shin, T.-C.; Leu, P.-L. Improvement of earthquake locations with the Marine Cable Hosted Observatory (MACHO) offshore NE Taiwan. Mar. Geophys. Res. 2014, 35, 327–336. [Google Scholar] [CrossRef]
- Kanazawa, T.; Shinohara, M.; Sakai, S.; Utada, H.; Shiobara, H.; Yamada, T.; Mochizuki, K.; Yamazaki, K. New innovative ocean bottom cabled seismometer system and observation in the Sea of Japan. In Proceedings of the 2011 IEEE Symposium on Underwater Technology and Workshop on Scientific Use of Submarine Cables and Related Technologies, Tokyo, Japan, 5–8 April 2011; pp. 1–3. [Google Scholar]
- Shinohara, M.; Yamada, T.; Sakai, S.; Shiobara, H.; Kanazawa, T. New ocean bottom cabled seismic and tsunami observation system enhanced by ICT. In Proceedings of the 2014 Oceans—St. John’s, St. John’s, NL, Canada, 14–19 September 2014; pp. 1–6. [Google Scholar]
- Kanazawa, T. Japan Trench earthquake and tsunami monitoring network of cable-linked 150 ocean bottom observatories and its impact to earth disaster science. In Proceedings of the 2013 IEEE International Underwater Technology Symposium (UT), Tokyo, Japan, 5–8 March 2013; pp. 1–5. [Google Scholar]
- Barnes, C.R.; Best, M.M.R.; Johnson, F.R.; Pautet, L.; Pirenne, B. Challenges, Benefits, and Opportunities in Installing and Operating Cabled Ocean Observatories: Perspectives from NEPTUNE Canada. IEEE J. Ocean. Eng. 2013, 38, 144–157. [Google Scholar] [CrossRef]
- Harris, D.W.; Duennebier, F.K. Powering cabled ocean-bottom observatories. IEEE J. Ocean. Eng. 2002, 27, 202–211. [Google Scholar] [CrossRef]
- Chen, Y.; Xiao, S.; Li, D. Power system design for constant current subsea observatories. Front. Inf. Technol. Electron. Eng. 2019, 20, 1505–1515. [Google Scholar] [CrossRef]
- Takehira, K. Submarine system powering. In Undersea Fiber Communication Systems, 2nd ed.; Academic Press: Cambridge, MA, USA, 2016; pp. 381–402. ISBN 9780128042694. [Google Scholar]
- Wang, H.; Saha, T.; Riar, B.; Zane, R. Design Considerations for Current-Regulated Series-Resonant Converters with a Constant Input Current. IEEE Trans. Power Electron. 2019, 34, 141–150. [Google Scholar] [CrossRef]
- Saha, T.; Wang, H.; Riar, B.; Zane, R. Analysis and Design of a Parallel Resonant Converter for Constant Current Input to Constant Voltage Output DC-DC Converter Over Wide Load Range. In Proceedings of the 2018 International Power Electronics Conference (IPEC-Niigata 2018-ECCE Asia), Niigata, Japan, 20–24 May 2018; pp. 4074–4079. [Google Scholar]
- Saha, T.; Bagchi, A.C.; Wang, H.; Zane, R. Analysis and Design of Wide Range Output Voltage Regulated Power Supply for Underwater Constant Input Current DC Distribution System. In Proceedings of the 2018 IEEE 19th Workshop on Control and Modeling for Power Electronics (COMPEL), Padova, Italy, 25–28 June 2018; pp. 1–7. [Google Scholar]
- Wang, H.; Saha, T.; Zane, R. Impedance-based stability analysis and design considerations for DC current distribution with long transmission cable. In Proceedings of the 2017 IEEE 18th Workshop on Control and Modeling for Power Electronics (COMPEL), Stanford, CA, USA, 9–12 July 2017; pp. 1–8. [Google Scholar]
- Liukkonen, M.; Hinkkanen, M.; Kyyra, J.; Ovaska, S.J. Modeling of multiport DC busses in power-electronic systems. In Proceedings of the 2013 IEEE International Conference on Industrial Technology (ICIT), Cape Town, South Africa, 25–28 February 2013; pp. 740–745. [Google Scholar]
- Zhang, S.; Jiang, S.; Lu, X.; Ge, B.; Peng, F.Z. Resonance issues and damping techniques for grid-connected inverters with long transmission cable. IEEE Trans. Power Electron. 2014, 29, 110–120. [Google Scholar] [CrossRef]
- Chen, Y.H.; Zang, Y.J.; Yao, J.J.; Muhammad, G. Optimal communication frequency for switching cabled ocean networks with commands carried over the power line. Front. Inf. Technol. Electron. Eng. 2019, 20, 1331–1343. [Google Scholar] [CrossRef]
- Acciari, G.; Graci, D.; La Scala, A. Higher PV module efficiency by a novel CBS bypass. IEEE Trans. Power Electron. 2011, 26, 1333–1336. [Google Scholar] [CrossRef]
- Dalessandro, V.; Guerriero, P.; Daliento, S. A simple bipolar transistor-based bypass approach for photovoltaic modules. IEEE J. Photovolt. 2014, 4, 505–513. [Google Scholar] [CrossRef]
- Qian, W.; Peng, F.Z.; Han, S. The faulty module bypass for thermoelectric generation. In Proceedings of the 2010 Twenty-Fifth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Palm Springs, CA, USA, 21–25 Februaty 2010; pp. 2288–2293. [Google Scholar]
- Siri, K.; Willhoff, M.; Truong, C.; Conner, K.A. Uniform voltage distribution control for series-input parallel-output, connected converters. In Proceedings of the IEEE Aerospace Conference Proceedings, Big Sky, MT, USA, 4–11 March 2006; pp. 1–12. [Google Scholar]
- Chen, W.; Zhuang, K.; Ruan, X. A Input-Series- and Output-Parallel-Connected Inverter System for High-Input-Voltage Applications. IEEE Trans. Power Electron. 2009, 24, 2127–2137. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Iin | 1 A |
| Iout0, Iout1, Iout2, Iout3 | 1.85 A |
| ξ1, ξ2, ξ2, ξ3 | 87% ± 2% |
| R0_0, R0_1, R0_2, R0_3 | 12.5 Ω |
| D0MAX, D1MAX, D2MAX, D3MAX | 0.5 |
| Vref0 | 48 V |
| Vref1 | 47.5 V |
| Vref2 | 47 V |
| Vref3 | 46.5 V |
| Phys−L | 27 W |
| Phys−U | 7 W |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Zang, Y.; Yang, C.; Duan, Z.; Zhang, H.; Muhammad, G. Reconfigurable Power Converter for Constant Current Underwater Observatory. Electronics 2020, 9, 307. https://doi.org/10.3390/electronics9020307
Chen Y, Zang Y, Yang C, Duan Z, Zhang H, Muhammad G. Reconfigurable Power Converter for Constant Current Underwater Observatory. Electronics. 2020; 9(2):307. https://doi.org/10.3390/electronics9020307
Chicago/Turabian StyleChen, Yanhu, Yujia Zang, Canjun Yang, Zhiyong Duan, Haoyu Zhang, and Gul Muhammad. 2020. "Reconfigurable Power Converter for Constant Current Underwater Observatory" Electronics 9, no. 2: 307. https://doi.org/10.3390/electronics9020307
APA StyleChen, Y., Zang, Y., Yang, C., Duan, Z., Zhang, H., & Muhammad, G. (2020). Reconfigurable Power Converter for Constant Current Underwater Observatory. Electronics, 9(2), 307. https://doi.org/10.3390/electronics9020307