In this paper, we note that a situation in which a system operates determines what functions of the system run in industrial applications such as automotive one. More concretely, the operating situation determines what data the system requires and how frequently it requires them. We propose to introduce operating modes, each of which reflects its own operating situation, to the TDMA scheme. System designers are to specify a set of active communication signals for each and every operating mode. In this paper, we propose dynamic slot multiplexing (DSM) which switches operating modes and assignments of communication signals to time slots adaptively with operating situations. Compared to a single-mode TDMA system [
6], in which a single message schedule is determined for all communication signals, DSM determines a message schedule for each operating mode and switch operating modes adaptively with operating situations so that it can avoid wasting networking resources. We present an optimization problem in which a message schedule for each and every operating mode is optimized so that operating frequency of wire harness is minimized for given operating modes and their own set of communication signals.
3.1. Optimization Problem in DSM
Let us assume that a set of network nodes are given and constitute a network. We define a communication signal as the behavior of a network node in requesting to send a constant size of data to one or more network nodes by its deadline periodically or aperiodically. We also define a communication message as an instance of a communication signal which a network node requests to send via the FlexRay bus(es). From an aspect of implementation, a communication message is split into one or more frames which are data structures for transmission via bus(es). For simple problem formulation we assume a network system in which all communication messages are requested to be sent periodically. A communication signal is defined as a 4-tuple where N is a sender node, C is a period between successive communication messages, D is a relative deadline from its request, and B is the size of a communication message in bits. We assume that sender node N requests to send a datum of B bits every C time units to all the network nodes and finish sending it within duration D from its request.
We assume that communication signals of a TDMA-based networking system are given and all communication messages of the signals are scheduled over time slots of static segments. A static segment consists of time slots and we treat q as a variable. We specify a communication signal by a 4-tuple . No more than a static slot is assigned to a communication signal within a communication cycle. We represent the baud rate of a communication bus of a target network by w [bps]. The objective function in our optimization problem is to minimize w.
In this paper, we note that a situation in which a system operates determines what functions of the system run in industrial applications such as automotive one. An operating mode is specified by a set of active communication signals, whose messages are sent under its situation. Now let us assume that system designers specify
operating modes and that a set of
is given. The following constant
indicates whether or not the corresponding communication signal is active.
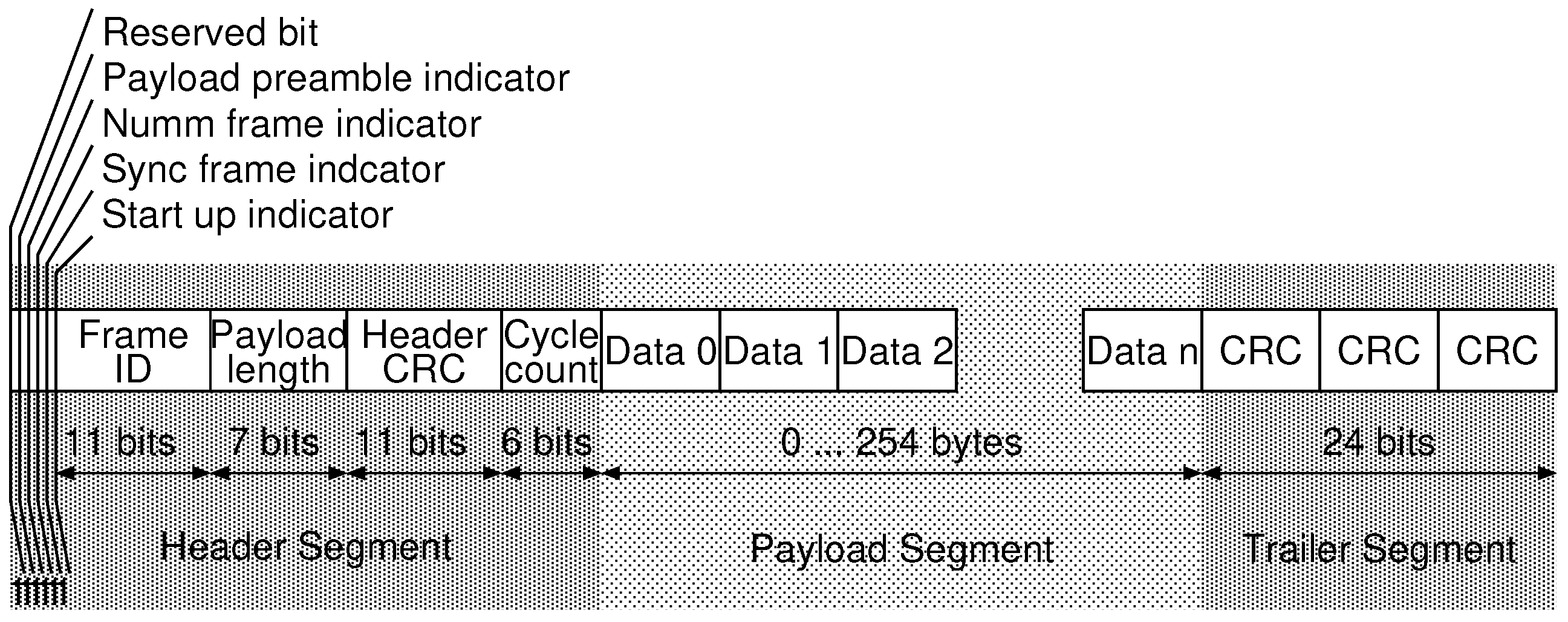
A communication message of a communication signal is split into one or more frames. As shown in
Figure 2, a frame consists of a header segment, a payload segment, and trailer segment. We notate the size of a header segment as
and that of trailer segment as
. The size of a payload segment, which system designers specify, is identical in any static static segments. A payload segment consists of
p 16-bit words. The size of a frame,
f, is shown as follows.
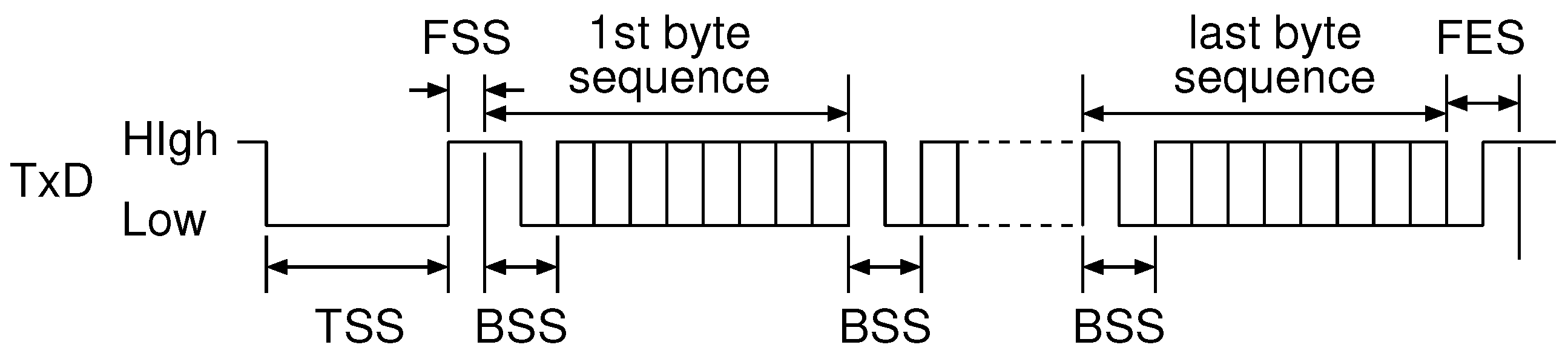
The size of an encoded frame,
, is shown as follows.
where
,
,
,
,
, and
are the numbers of bit time for a TSS, an FSS, a BSS, an FES, a channel idle delimiter, and a channel idle, respectively.
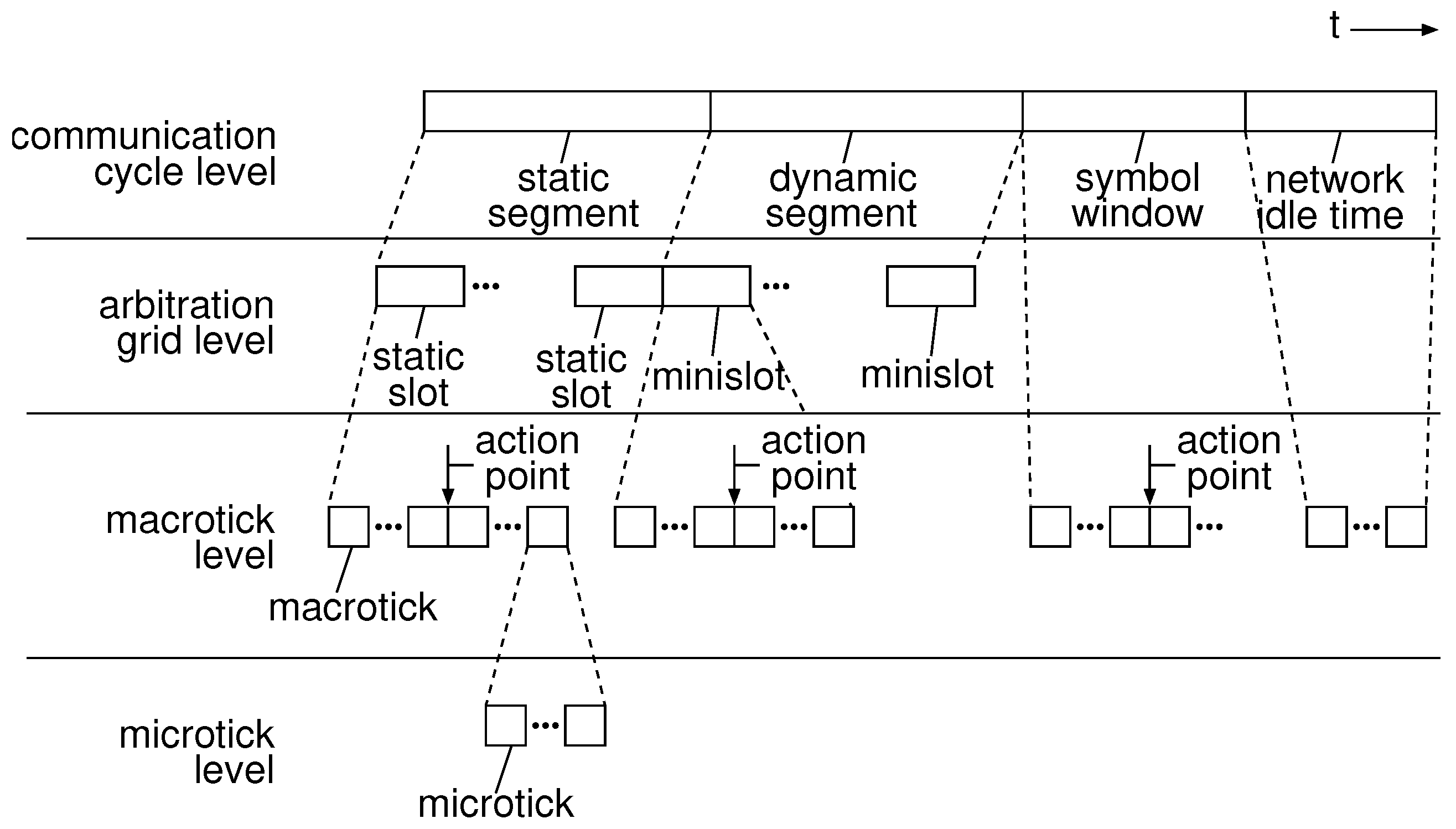
Let us discuss time for a communication cycle
. A frame is sent using a static slot in a static segment. For a simple explanation, we assume that system designers conform to deadline constraints as far as a networking system operates normally. We also assume that a communication cycle consists of a static segment. Our optimization problem can be easily extended to a network system which has a dynamic segment, symbol window, and network idle time. Please note that message scheduling technique using dynamic segments is out of scope of this paper and should be discussed as another research topic. From our assumption, time for a communication cycle
is equal to time for
static slots as follows.
is an integer variable standing for the number of static slots constituting a static segment and
is a baud rate of a communication bus of a FlexRay networking system.
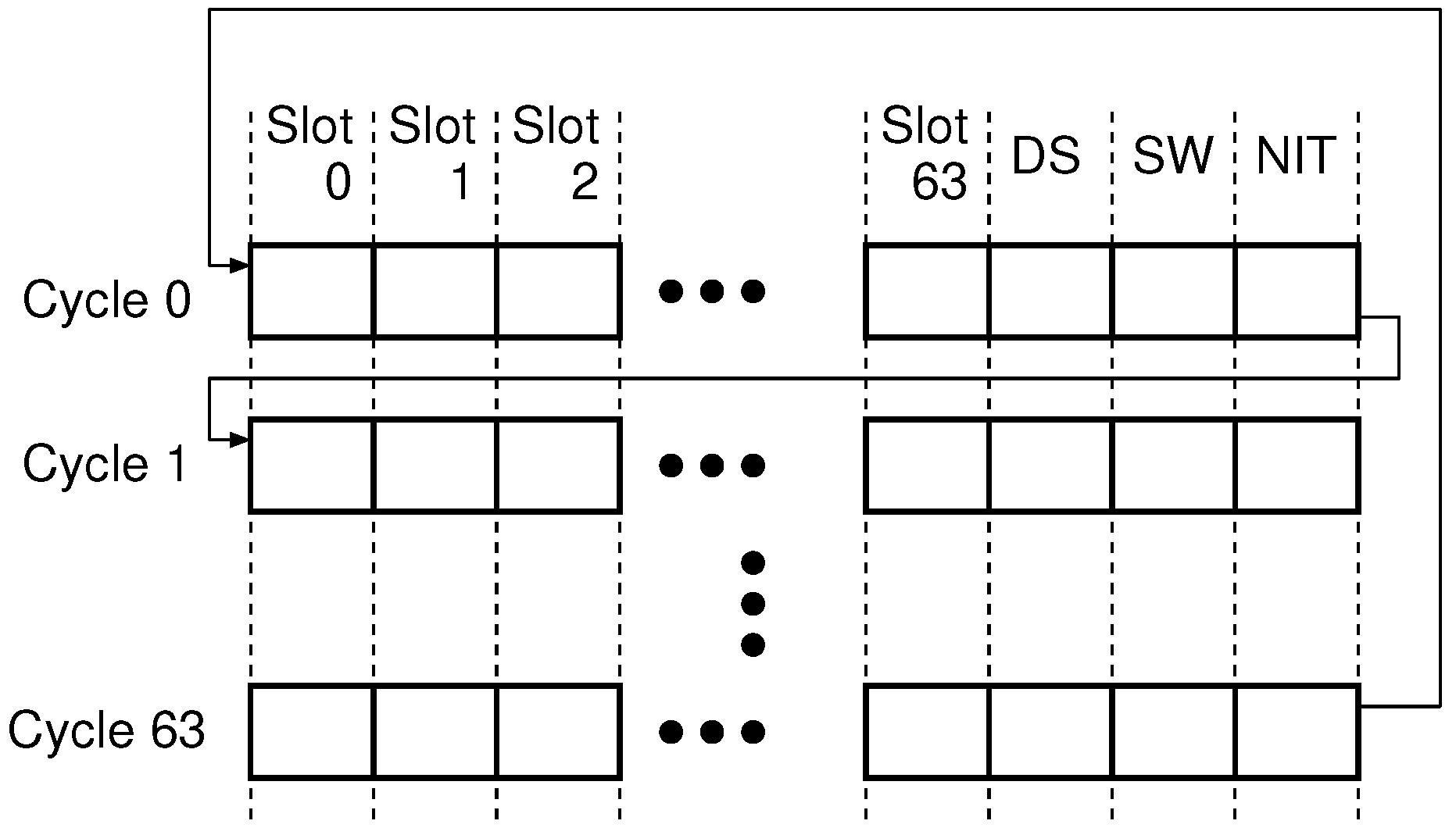
In the FlexRay standard, system designers may adopt a slot multiplexing technique by which they assign multiple communication cycles to a static slot by distinguishing 64 communication cycles. More concretely, they may assign a communication cycle not to a static slot but to a pair of a static slot and a communication cycle. The 64 communication cycles are periodic and recurrent. Adoption of slot multiplexing help system designers effectively use static slots and avoid wasting static slots while they must make efforts towards obtaining an optimal design over larger design space. For making an optimization problem simple, we introduce a binary variable
which indicates that
static slots are assigned to communication signal
and that a static slot is used every
communication cycles.
As the number of assignments of communication signal
to communication cycles is one, the following constraint is introduced.
Communication signal
requires
static slots to send its communication message. As transmission time to send a message of a communication signal is not more than its period of transmission requests, the following constraint is introduced.
A communication signal uses
communication cycles out of 64 communication cycles and uses one communication cycle every
communication cycles. The number of selections is
. We introduce the following binary variable
for indicating the first communication cycle.
We introduce the following constraint from the definitions of variables
and
.
We introduce the following binary variable which indicates whether or not communication signal
As a communication signal uses a cycle every
cycles under the corresponding operating modes, the following constraint is introduced.
The number of static slots of a communication cycle,
q, is the maximum number of communication signals which are assigned to the communication cycle as follows.
We discuss a transmission process of a communication message and its constraint.
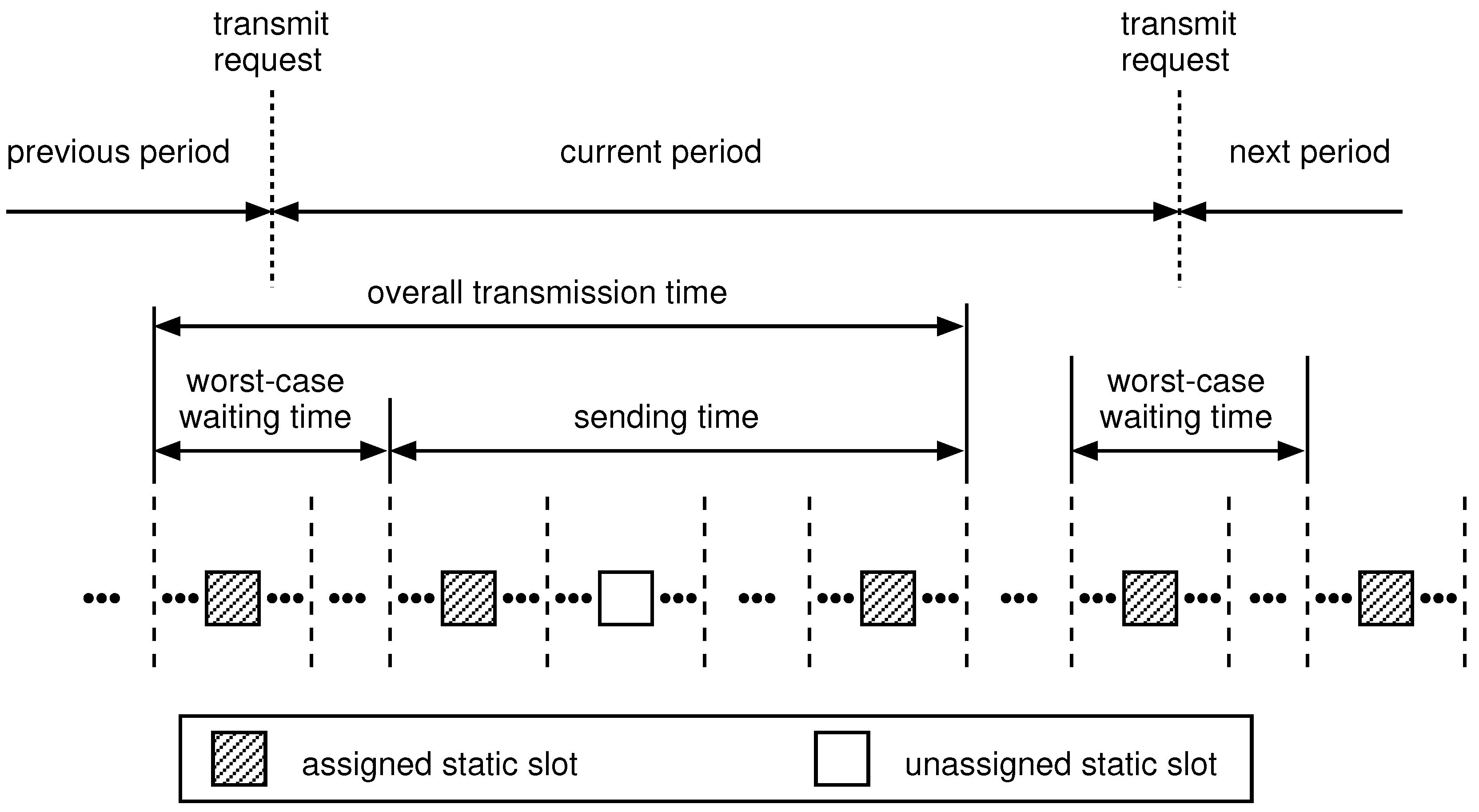
Figure 5 shows a transmission process in which a communication message is periodically transmitted. Wait time occurs in each message transmission before the first frame gets on the bus. We assume that a communication signal may be assigned to any static slot of the corresponding communication cycles. We regard the interval between two successive frames as the worst-case wait time.
Wait time is followed by time for sending frames. A communication signal uses any static slot of the corresponding communication cycle. Time for sending frames of a communication message is conservatively introduced as follows.
The worst-case latency to send a communication message of signal
is the summation of the worst-case wait time (
1) and the sending time of all frames (
2) as follows.
Since it is required that the worst-case latency
of communication signal
i is not more than its deadline, the following constraint is introduced.
Our mathematical model is given as follows.
Minimize the cost function w
subject to
.
.
.
.
.
.
.
.
Variables
w is a real variable.
p is an integer variable.
q is an integer variable.
is a binary variable.
is a real variable.
is an integer variable.
is a binary variable.
is a binary variable.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}