A Benchmark of Popular Indoor 3D Reconstruction Technologies: Comparison of ARCore and RTAB-Map

 , , , , and
, , , , and 
Abstract
1. Introduction
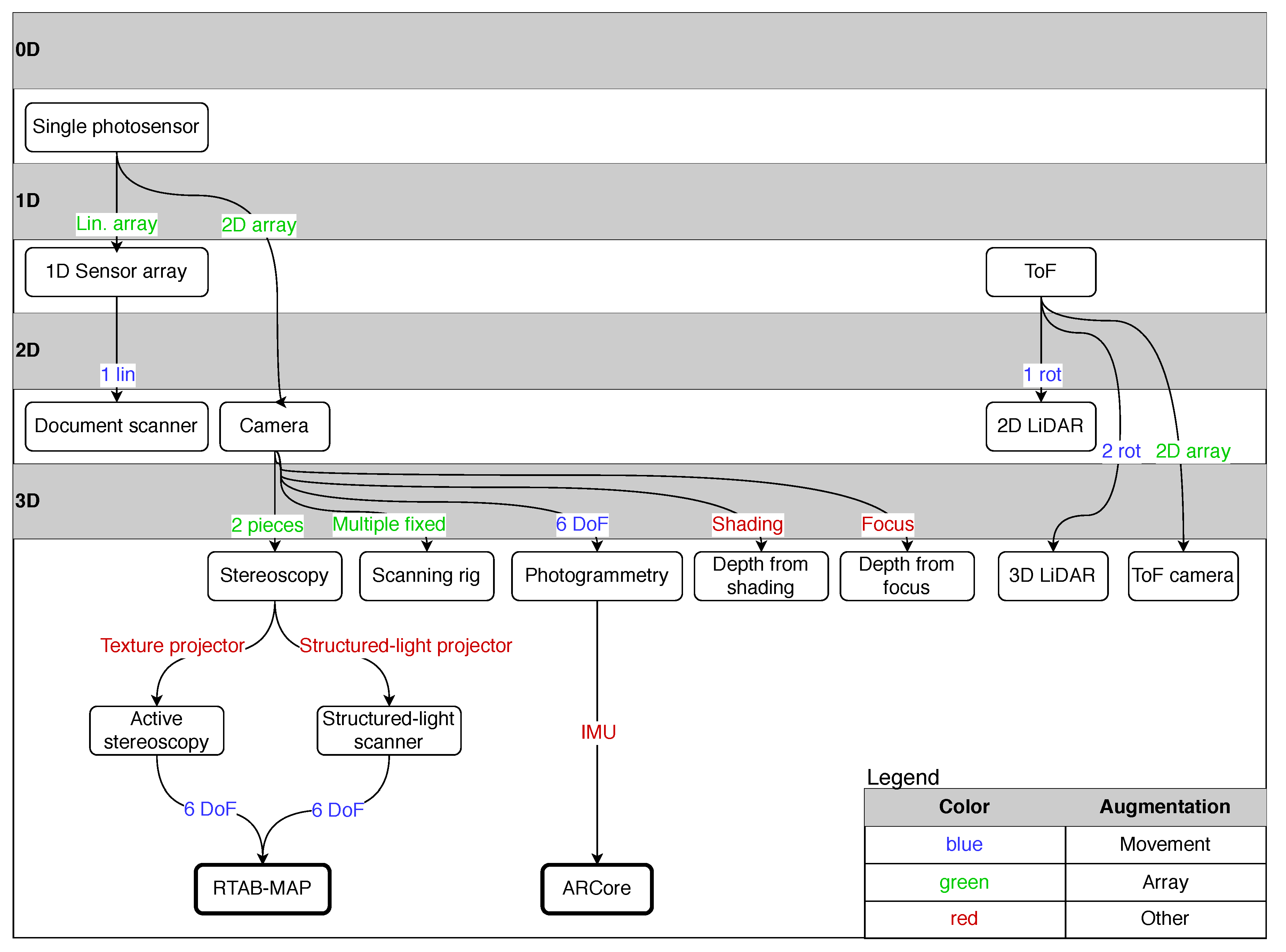
2. Overview of the Investigated Technologies
2.1. ARCore
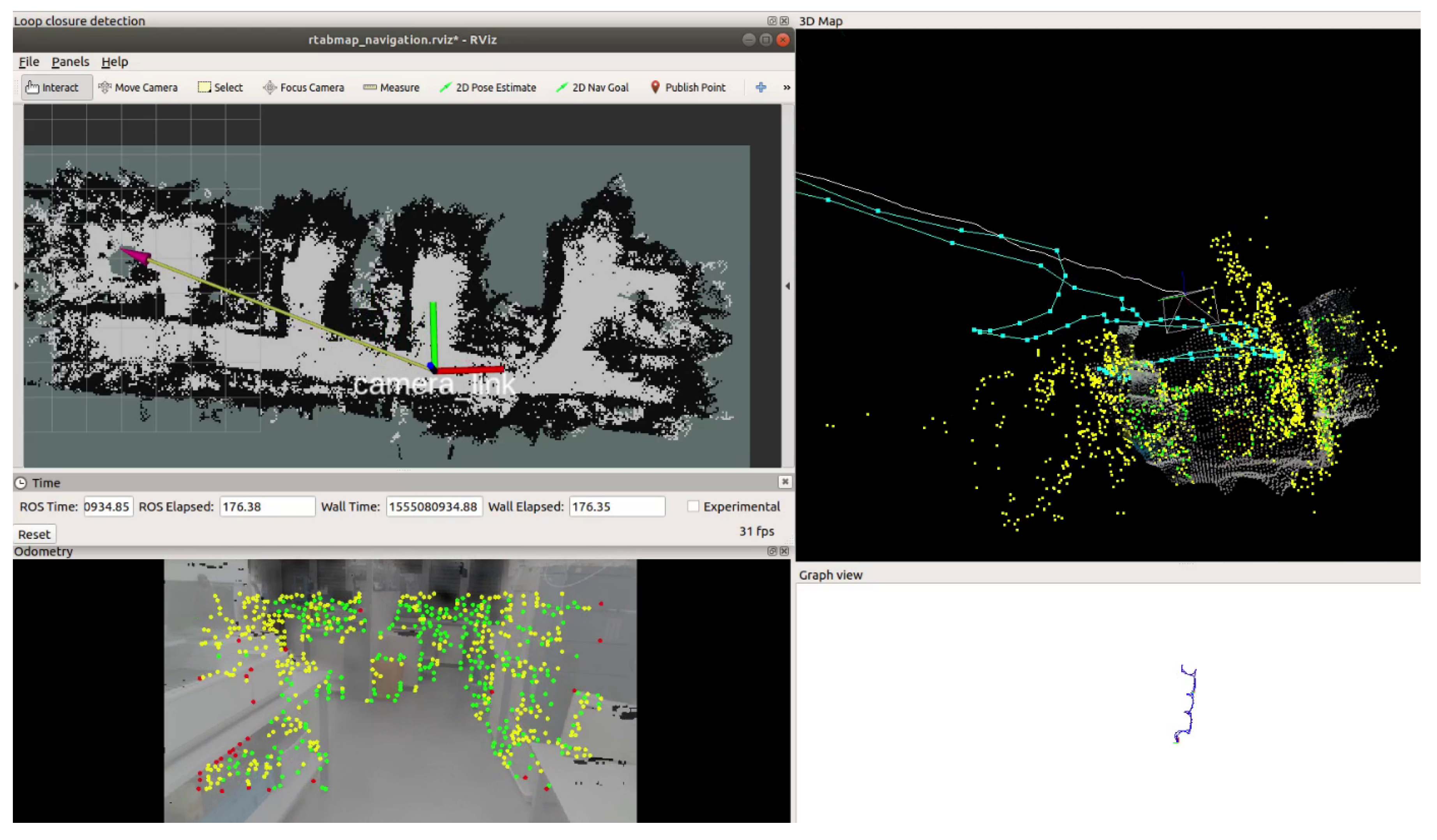
2.2. RTAB-Map
3. Experimental Comparison
3.1. Methodology
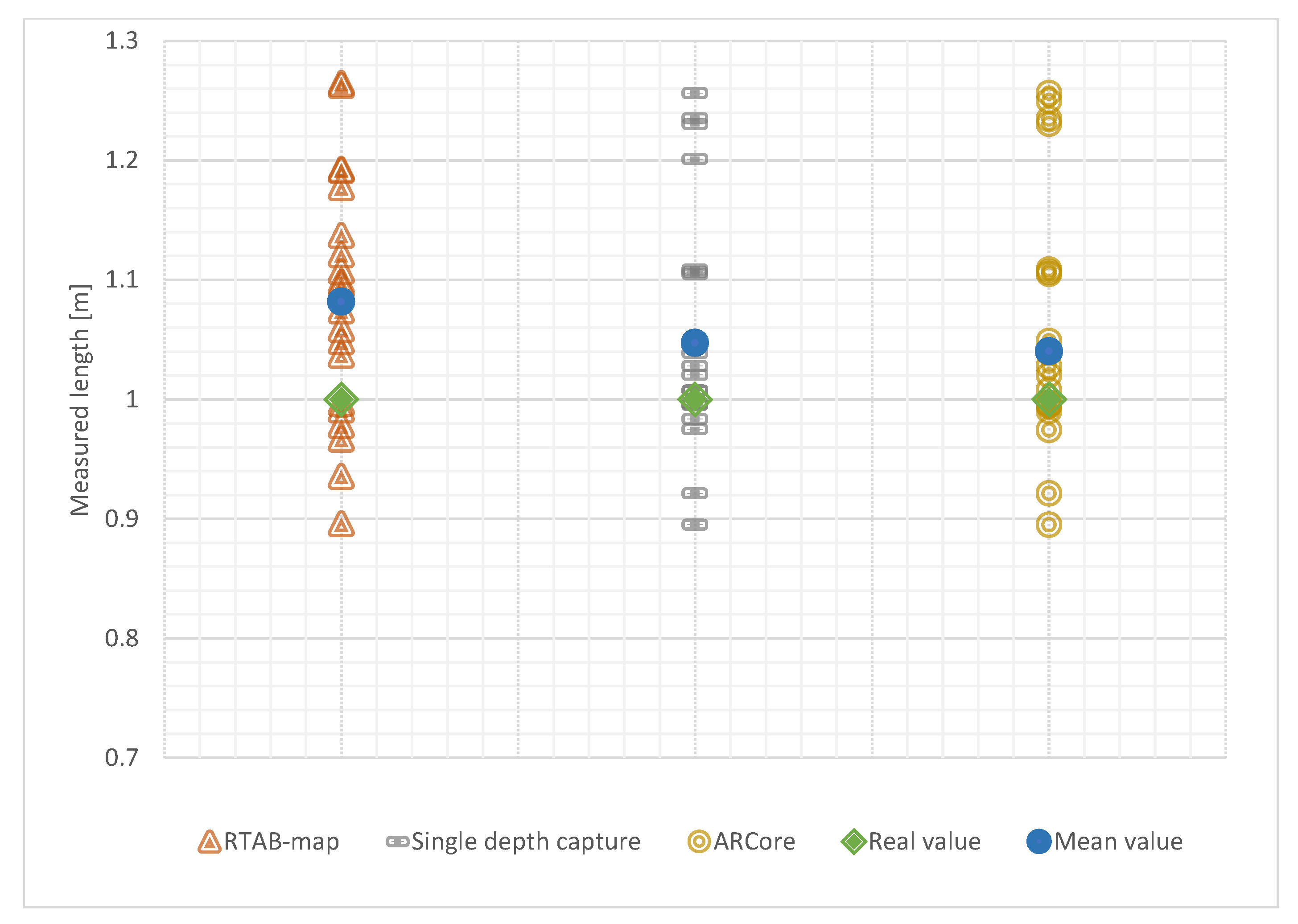
3.2. Results and Discussion
4. Case Studies
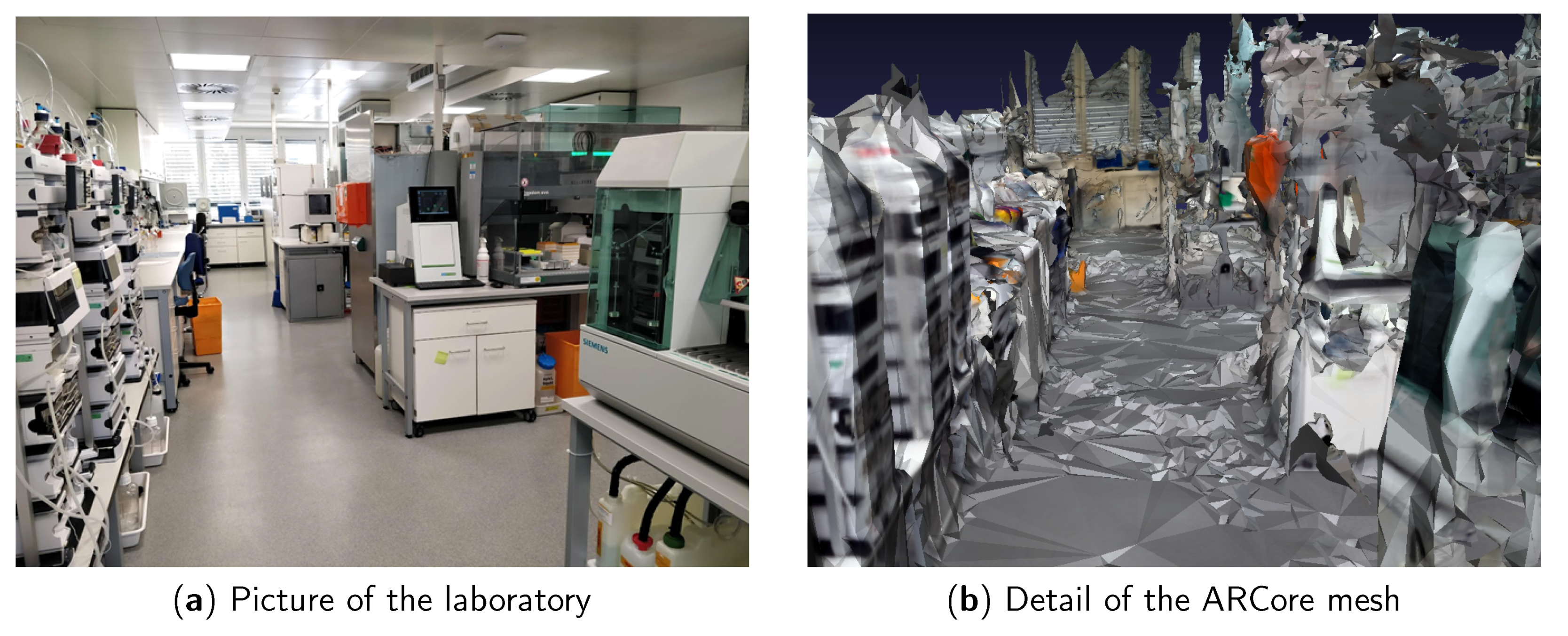
4.1. Surveying in Laboratory Automation
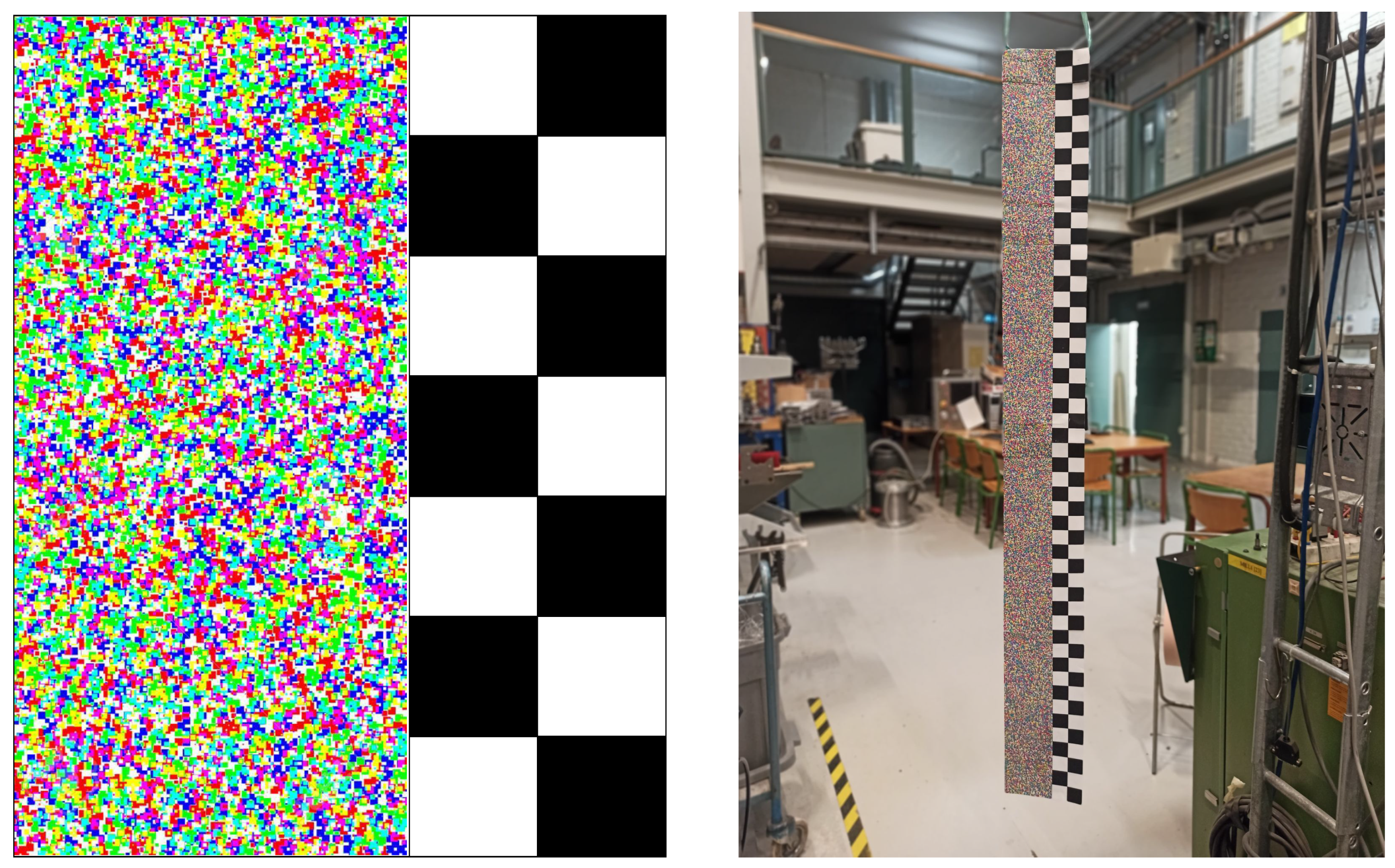
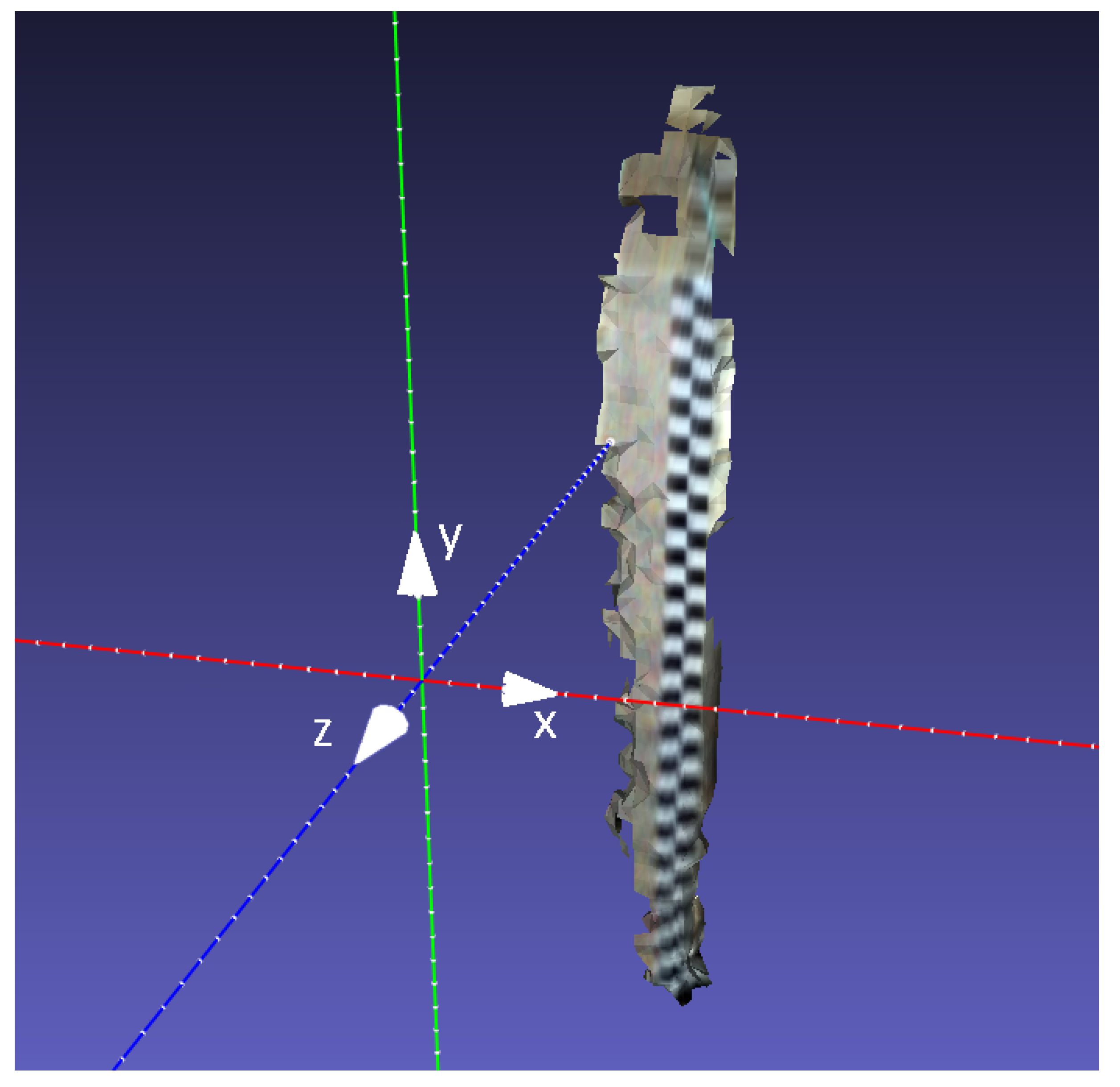
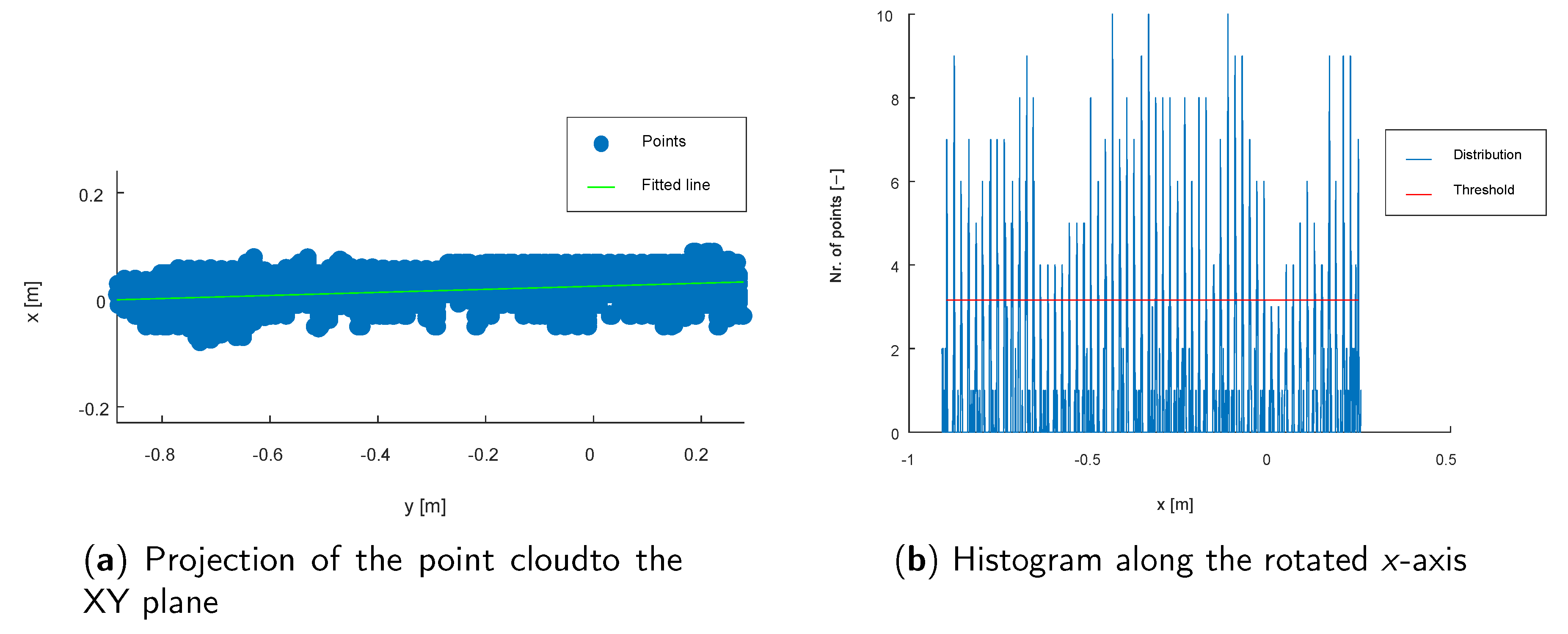
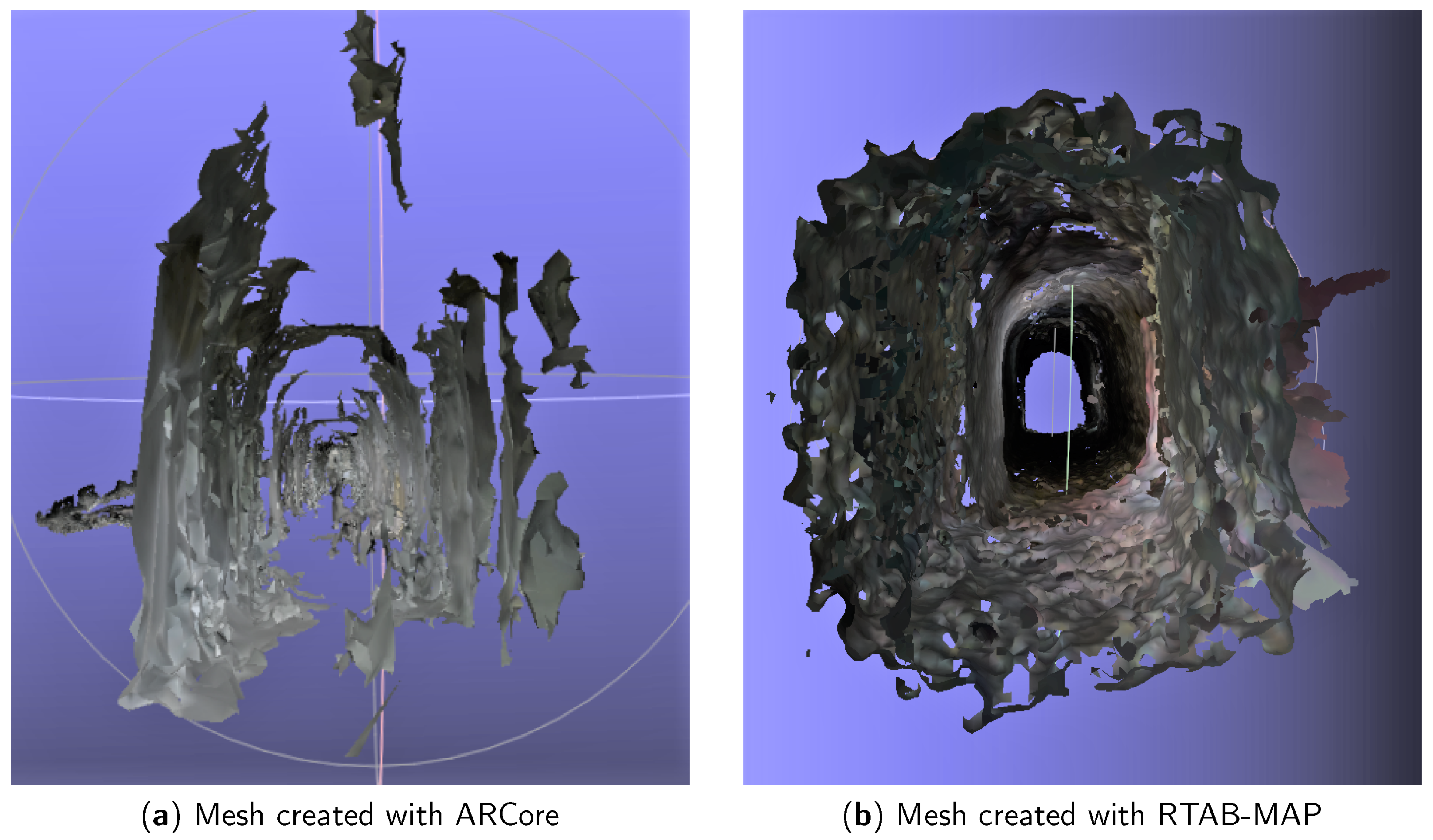
4.2. Landmark Surveying
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| Abbreviation | Name |
| 0D | Null-dimensional |
| 1D | One-dimensional |
| 2D | Two-dimensional |
| 3D | Three-dimensional |
| AR | Augmented reality |
| CAD | Computer aided design |
| DoF | Degree of freedom |
| IMU | Inertial measurement unit |
| LiDAR | Light detection and ranging |
| OBJ | Object file extensions |
| RANSAC | Random sample consensus |
| RGB | Red Green Blue |
| RGB-D | Red Green Blue Depth |
| ROS | Robot operating system |
| RTAB-Map | Real-time appearance-based mapping |
| Rviz | ROS Visualizer |
| SDK | Software development kit |
| ToF | Time-of-flight |
References
- Giancola, S.; Valenti, M.; Sala, R. A Survey on 3D Cameras: Metrological Comparison of Time-of-Flight, Structured-Light and Active Stereoscopy Technologies; Technical Report; SpringerBriefs in Computer Science; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Fursattel, P.; Placht, S.; Balda, M.; Schaller, C.; Hofmann, H.; Maier, A.; Riess, C. A Comparative Error Analysis of Current Time-of-Flight Sensors. IEEE Trans. Comput. Imaging 2015, 2, 27–41. [Google Scholar] [CrossRef]
- Kulkarni, J.B.; Sheelarani, C.M. Generation of depth map based on depth from focus: A survey. In Proceedings of the 2015 1st International Conference on Computing Communication Control and Automation (ICCUBEA), Pune, India, 26–27 February 2015; pp. 716–720. [Google Scholar] [CrossRef]
- Ekberg, P.; Daemi, B.; Mattsson, L. 3D precision measurements of meter sized surfaces using low cost illumination and camera techniques. Meas. Sci. Technol. 2017, 28, 045403. [Google Scholar] [CrossRef]
- Schönberger, J.L.; Zheng, E.; Pollefeys, M.; Frahm, J.M. Pixelwise View Selection for Unstructured Multi-View Stereo. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 8–16 October 2016. [Google Scholar]
- Schonberger, J.L.; Frahm, J.M. Structure-from-Motion Revisited. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 4104–4113. [Google Scholar] [CrossRef]
- Martin-Brualla, R.; Radwan, N.; Sajjadi, M.S.M.; Barron, J.T.; Dosovitskiy, A.; Duckworth, D. NeRF in the Wild: Neural Radiance Fields for Unconstrained Photo Collections. arXiv 2020, arXiv:2008.02268. [Google Scholar]
- Molnár, A. Surveying Archaeological Sites and Architectural Monuments with Aerial Drone Photos; Technical Report 7; Department of Applied Informatics, John von Neumann Faculty of Informatics, Óbuda University: Budapest, Hungary, 2019. [Google Scholar]
- Murez, Z.; van As, T.; Bartolozzi, J.; Sinha, A.; Badrinarayanan, V.; Rabinovich, A. Atlas: End-to-End 3D Scene Reconstruction from Posed Images. arXiv 2020, arXiv:2003.10432. [Google Scholar]
- Sajjan, S.S.; Moore, M.; Pan, M.; Nagaraja, G.; Lee, J.; Zeng, A.; Song, S. ClearGrasp: 3D Shape Estimation of Transparent Objects for Manipulation. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020. [Google Scholar]
- Udvardy, P.; Jancsó, T.; Beszédes, B. 3D modelling by UAV survey in a church. In Proceedings of the NTinAD 2019—New Trends in Aviation Development 2019—14th International Scientific Conference, Chlumec nad Cidlinou, Czech Republic, 26–27 September 2019; pp. 189–192. [Google Scholar] [CrossRef]
- Jancsó, T.; Engler, P.; Udvardy, P. Aerial Survey Test Project with DJI Phantom 3 Quadcopter Drone; Technical Report. RevCAD J. Geodesy Cadastre 2016, 21, 59–66. [Google Scholar]
- Kocur, D.; Švecová, M.; Kažimír, P. Determining the Position of the Moving Persons in 3D Space by UWB Sensors using Taylor Series Based Localization Method. Acta Polytech. Hung. 2019, 16, 2019–2064. [Google Scholar] [CrossRef]
- Molnár, G.; Szuts, Z.; Biró, K. Use of Augmented Reality in Learning. Acta Polytech. Hung. 2018, 15, 209–222. [Google Scholar]
- Engelhardt-Nowitzki, C.; Aburaia, M.; Otrebski, R.; Rauer, J.; Orsolits, H. Research-based teaching in Digital Manufacturing and Robotics—The Digital Factory at the UAS Technikum Wien as a Case Example. Procedia Manuf. 2020, 45, 164–170. [Google Scholar] [CrossRef]
- Hanafi, A.; Elaachak, L.; Bouhorma, M. A comparative study of augmented reality SDKs to develop an educational application in chemical field. In Proceedings of the 2nd International Conference on Networking, Information Systems & Security, Rabat, Morocco, 27–28 March 2019. Part F148154. [Google Scholar] [CrossRef]
- Fan, X.; Chai, Z.; Deng, N.; Dong, X. Adoption of augmented reality in online retailing and consumers’ product attitude: A cognitive perspective. J. Retail. Consum. Serv. 2020, 53, 101986. [Google Scholar] [CrossRef]
- Wolfel, M.; Braun, M.; Beuck, S. How does augmented reality improve the play experience in current augmented reality enhanced smartphone games? In Proceedings of the 2019 International Conference on Cyberworlds (CW 2019), Kyoto, Japan, 2–4 October 2019; pp. 407–410. [Google Scholar] [CrossRef]
- Microsoft HoloLens | Mixed Reality Technology for Business. Available online: https://www.microsoft.com/en-us/hololens (accessed on 7 September 2020).
- Google–Glass. Available online: https://www.google.com/glass/start/ (accessed on 7 September 2020).
- Henrysson, A.; Ollila, M. Augmented reality on smartphones. In Proceedings of the ART 2003—IEEE International Augmented Reality Toolkit Workshop, Tokyo, Japan, 7 October 2003; pp. 27–28. [Google Scholar] [CrossRef]
- ARCore overview | Google Developers. Available online: https://developers.google.com/ar/discover (accessed on 7 September 2020).
- 3D Scanner for ARCore·lvonasek/tango Wiki·GitHub. Available online: https://github.com/lvonasek/tango/wiki/3D-Scanner-for-ARcore (accessed on 9 August 2020).
- Labb, M. RTAB-Map as an Open-Source Lidar and Visual SLAM Library for Large-Scale and Long-Term Online Operation. J. Field Robot. 2019, 36, 416–446. [Google Scholar] [CrossRef]
- RTAB-Map. 2019. Available online: http://introlab.github.io/rtabmap/ (accessed on 6 September 2020).
- Intel(R) RealSense(TM) ROS Wrapper for D400 Series, SR300 Camera and T265 Tracking Module: IntelRealSense/Realsense-Ros. 2019. Available online: https://github.com/IntelRealSense/realsense-ros (accessed on 6 August 2020).
- Wolf, A.; Széll, K. A review on robotics in life science automation. In Proceedings of the AIS 2019 14th International Symposium on Applied Informatics and Related Areas Organized in the Frame of Hungarian Science Festival 2019 by Óbuda University, Székesfehérvár, Hungary, 14 November 2019; pp. 106–111. [Google Scholar]
- Wolf, A.; Galambos, P.; Széll, K. Device integration concepts in laboratory automation. In Proceedings of the 2020 IEEE 24th International Conference on Intelligent Engineering Systems (INES), Reykjavík, Iceland, 8–10 July 2020. [Google Scholar]
- Fleischer, H.; Thurow, K. Automation Solutions for Analytical Measurements: Concepts and Applications; Wiley-VCH: Weinheim, Germany, 2017; p. 272. [Google Scholar]
- Overview of the Intel® RealSense™ Depth Camera. 2019. Available online: https://software.intel.com/en-us/realsense/d400 (accessed on 9 August 2020).
- rtabmap_ros—ROS Wiki. 2019. Available online: http://wiki.ros.org/rtabmap_ros (accessed on 9 August 2020).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technology | RS | ARCore | |
|---|---|---|---|
| RTAB-map | Single | ||
| Measurements | 1.2627 | 1.0388 | 1.2498 |
| 1.0368 | 1.2303 | 1.2564 | |
| 1.1372 | 1.2011 | 1.0279 | |
| 1.1211 | 1.0074 | 1.2347 | |
| 1.1071 | 1.1047 | 0.9744 | |
| 1.2646 | 1.0073 | 1.2306 | |
| 1.0741 | 0.9951 | 0.9946 | |
| 0.8959 | 0.9956 | 0.9902 | |
| 1.0978 | 0.9835 | 1.105 | |
| 0.9666 | 0.9971 | 1.0077 | |
| 1.1771 | 0.895 | 0.9958 | |
| 1.1915 | 1.0487 | 0.9971 | |
| 0.9356 | 1.0205 | 0.9945 | |
| 0.991 | 1.1086 | 0.895 | |
| 1.0481 | 1.1065 | 1.0205 | |
| 1.0585 | 0.9213 | 1.0388 | |
| 0.9965 | 1.2564 | 1.0487 | |
| 1.1926 | 1.0279 | 1.1086 | |
| 0.9781 | 1.2353 | 1.1065 | |
| 1.0952 | 0.9749 | 0.9213 | |
| Mean | 1.081 | 1.058 | 1.060 |
| Range | 0.369 | 0.361 | 0.361 |
| Std of the mean | 0.023 | 0.023 | 0.024 |
| Measured value | 1.081 | 1.058 | 1.060 |
| +/− | 0.023 | 0.023 | 0.024 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wolf, Á.; Troll, P.; Romeder-Finger, S.; Archenti, A.; Széll, K.; Galambos, P. A Benchmark of Popular Indoor 3D Reconstruction Technologies: Comparison of ARCore and RTAB-Map. Electronics 2020, 9, 2091. https://doi.org/10.3390/electronics9122091
Wolf Á, Troll P, Romeder-Finger S, Archenti A, Széll K, Galambos P. A Benchmark of Popular Indoor 3D Reconstruction Technologies: Comparison of ARCore and RTAB-Map. Electronics. 2020; 9(12):2091. https://doi.org/10.3390/electronics9122091
Chicago/Turabian StyleWolf, Ádám, Péter Troll, Stefan Romeder-Finger, Andreas Archenti, Károly Széll, and Péter Galambos. 2020. "A Benchmark of Popular Indoor 3D Reconstruction Technologies: Comparison of ARCore and RTAB-Map" Electronics 9, no. 12: 2091. https://doi.org/10.3390/electronics9122091
APA StyleWolf, Á., Troll, P., Romeder-Finger, S., Archenti, A., Széll, K., & Galambos, P. (2020). A Benchmark of Popular Indoor 3D Reconstruction Technologies: Comparison of ARCore and RTAB-Map. Electronics, 9(12), 2091. https://doi.org/10.3390/electronics9122091