Group Teaching Optimization Algorithm Based MPPT Control of PV Systems under Partial Shading and Complex Partial Shading

 and
and 
Abstract
:1. Introduction
- The introduction of a novel implementation of GTOA based MPPT technique for the partial shading problem of the PV system. The exploration and exploitation of search space are controlled by parameter “b” and “c” for maximizing the GM identification and quicker tracking of GM.
- GTOA is effective in the optimization of uni-modal, multi-modal, and complex mathematical problems. The proposed GTOA has increased the overall tracking efficiency.
- The best solution is attained in the mechanism and used to converge the population. Meanwhile, the rest of the swarm particles iteratively search the space, due to which performance is not compromised. A comprehensive analysis was done using extensive case studies, and specifically CPS was elaborated.
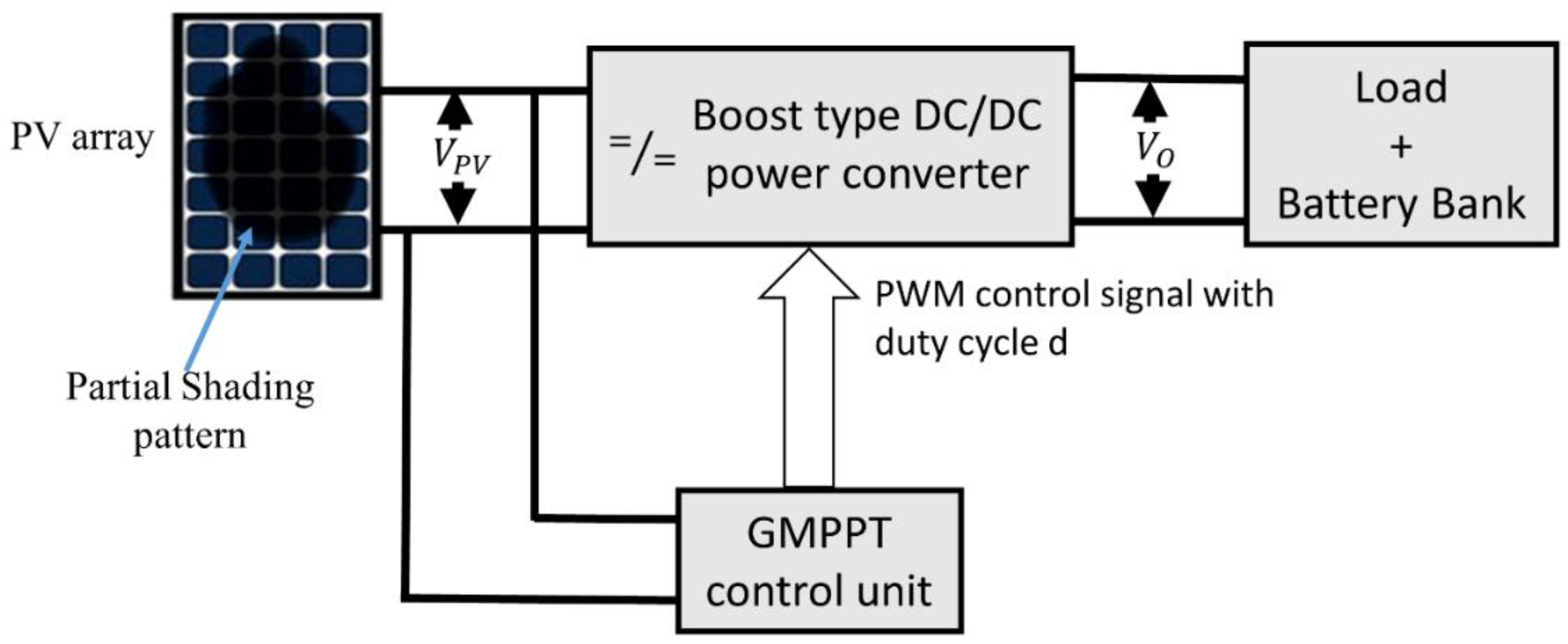
2. PV Cell Modeling and Behavior under Uniform Irradiance and PS Conditions
2.1. PV Model
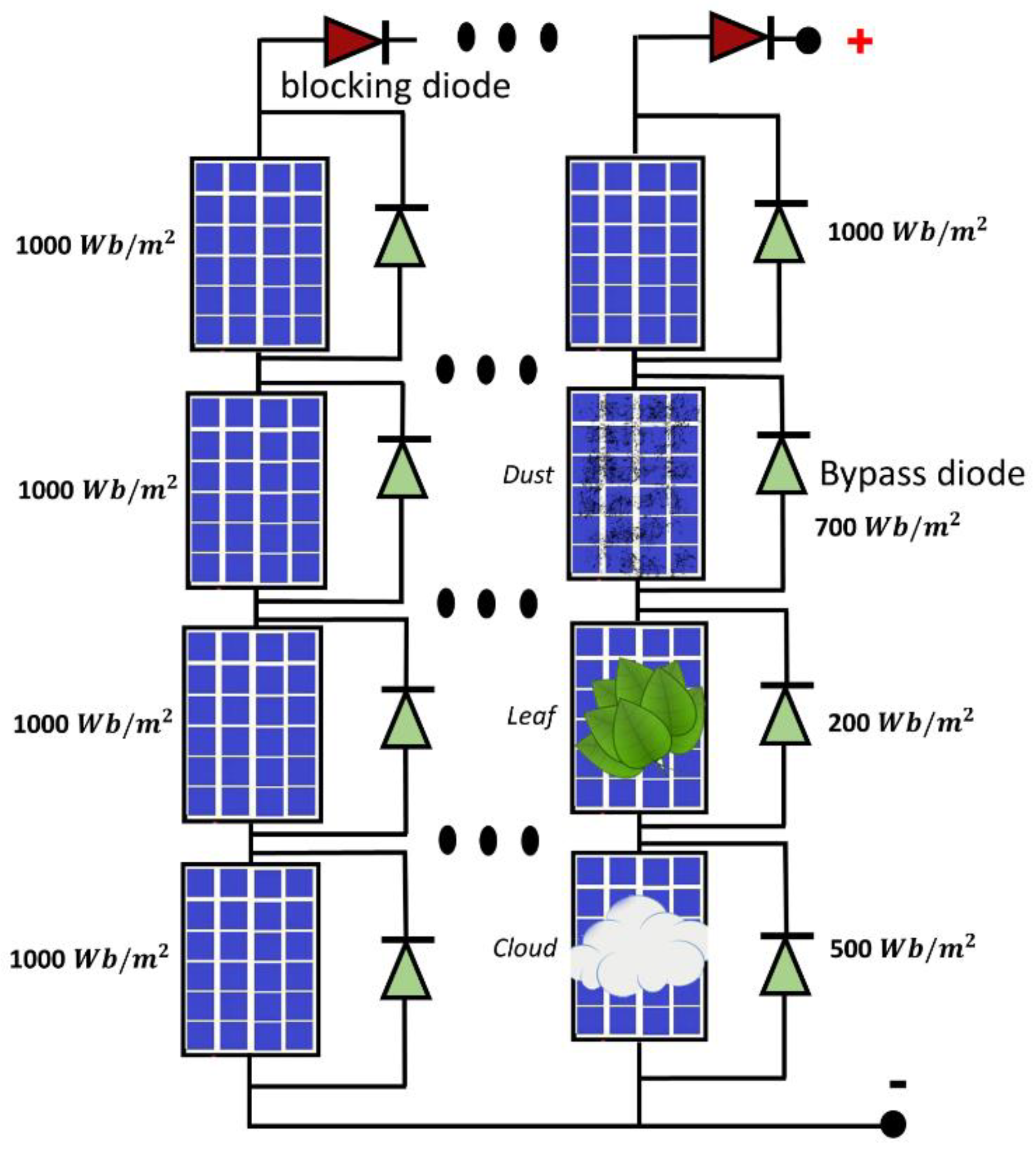
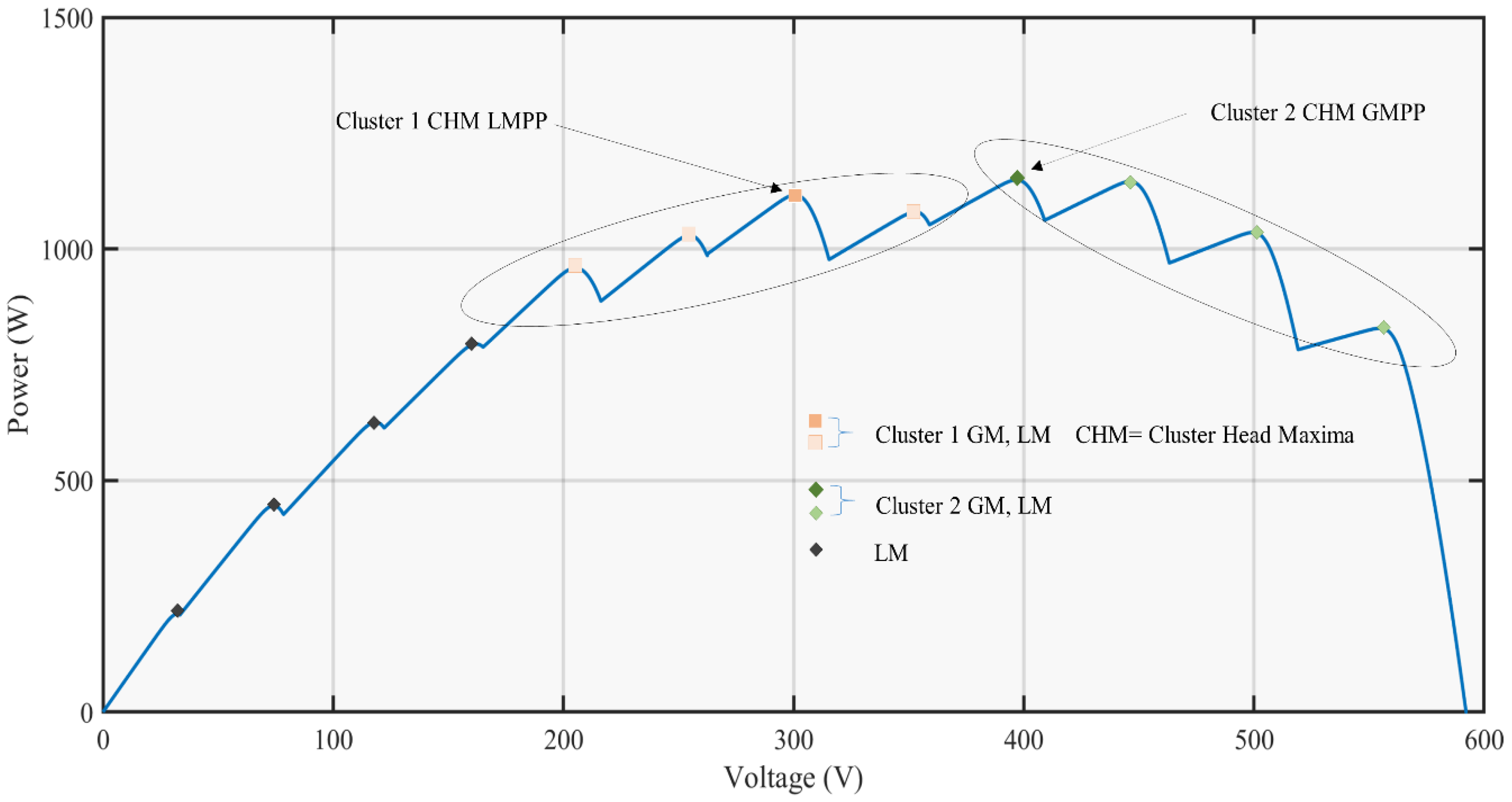
2.2. Partial Shading Condition
3. MPPT Using GTOA
3.1. Framework of GTOA
- The only difference between students is the capability to be acquiescent of knowledge. The greater challenge for the teacher to formulate the teaching plan depends upon the differences in ability to accept knowledge.
- The quality of a good teacher is to pay additional attention to the students who have a poor capability to accept knowledge.
- By self-learning, or by interacting with classmates, a student can improve his knowledge during the free time.
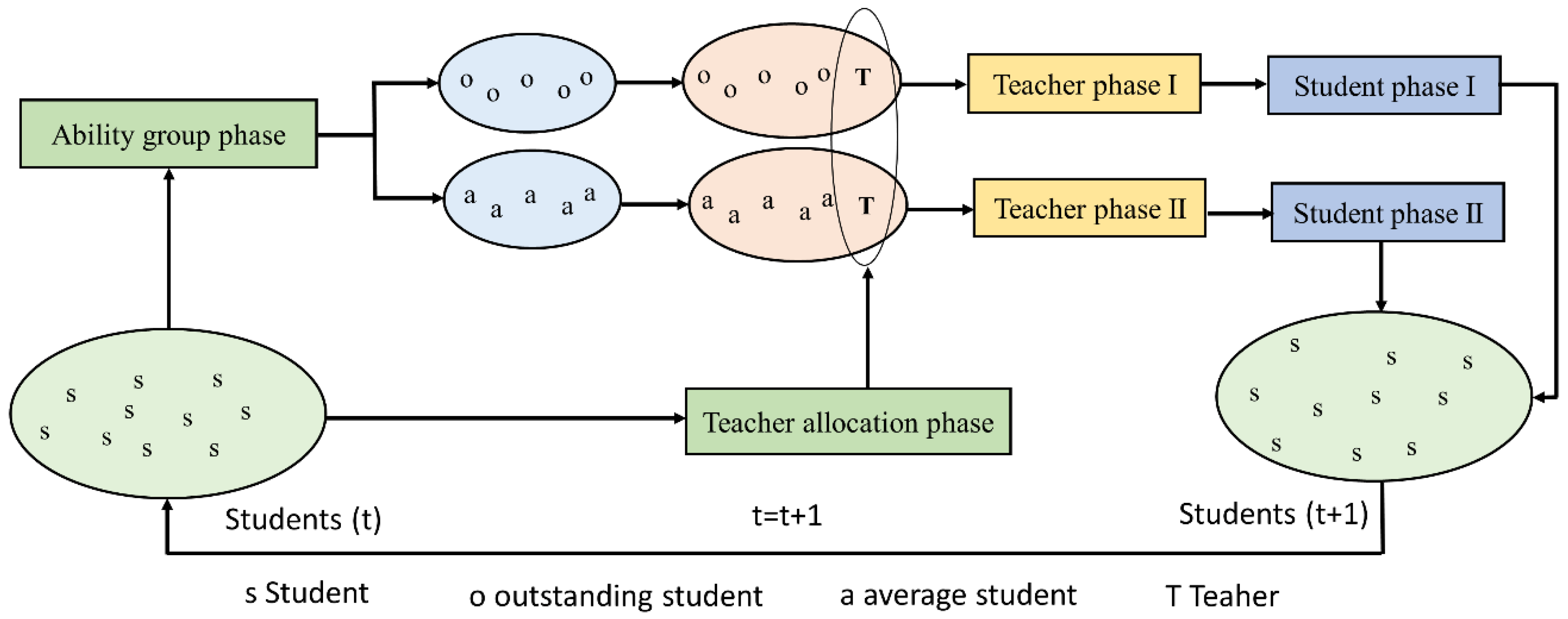
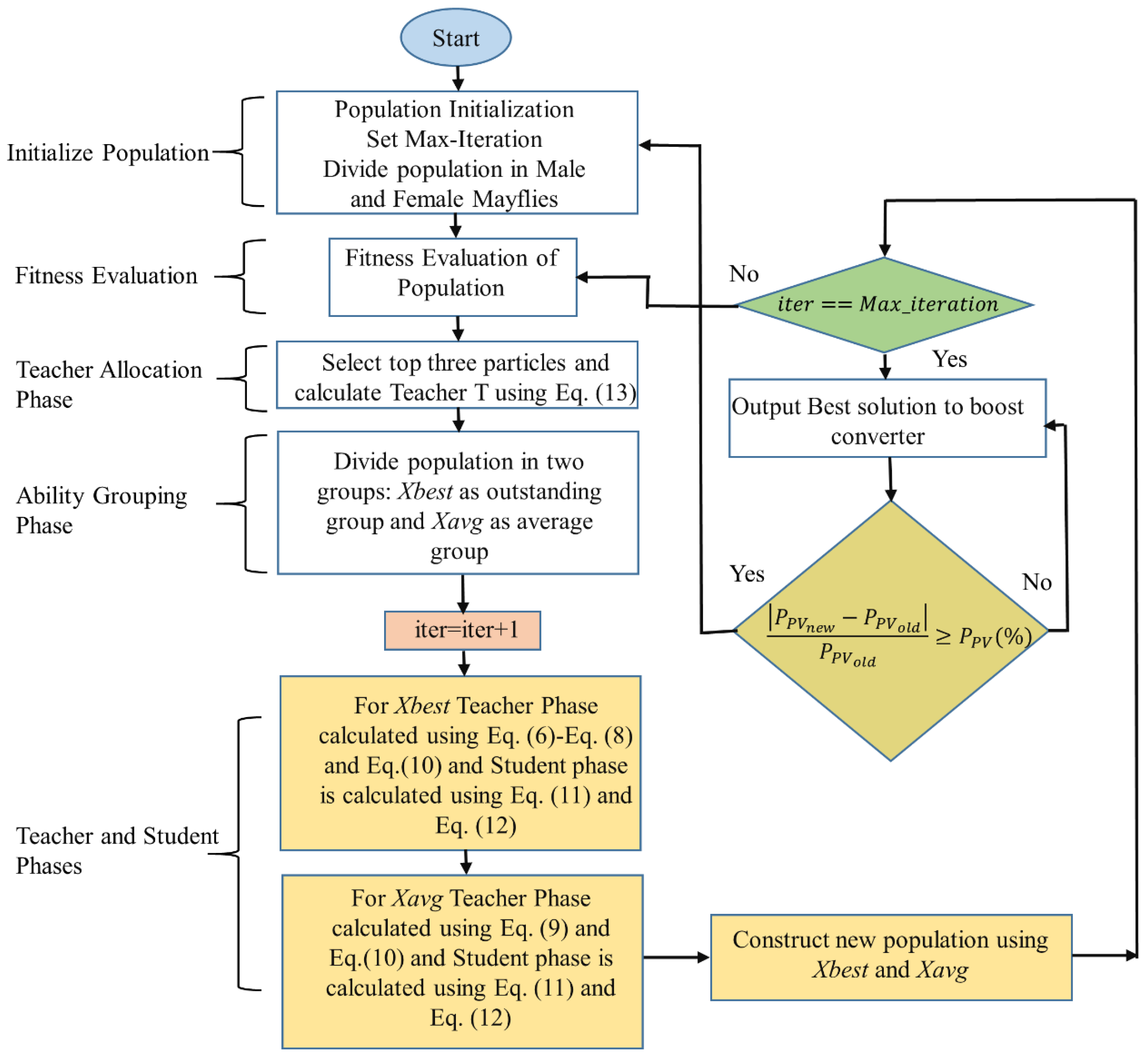
- To improve the knowledge of students, a good teacher allocation method is helpful. Four phases are proposed in this model, which are represented in Figure 5.
3.1.1. Ability Grouping
3.1.2. Teacher Phase
- Teacher phase I:
- Teacher phase II:
3.1.3. Student Phase
3.1.4. Teacher Allocation Phase
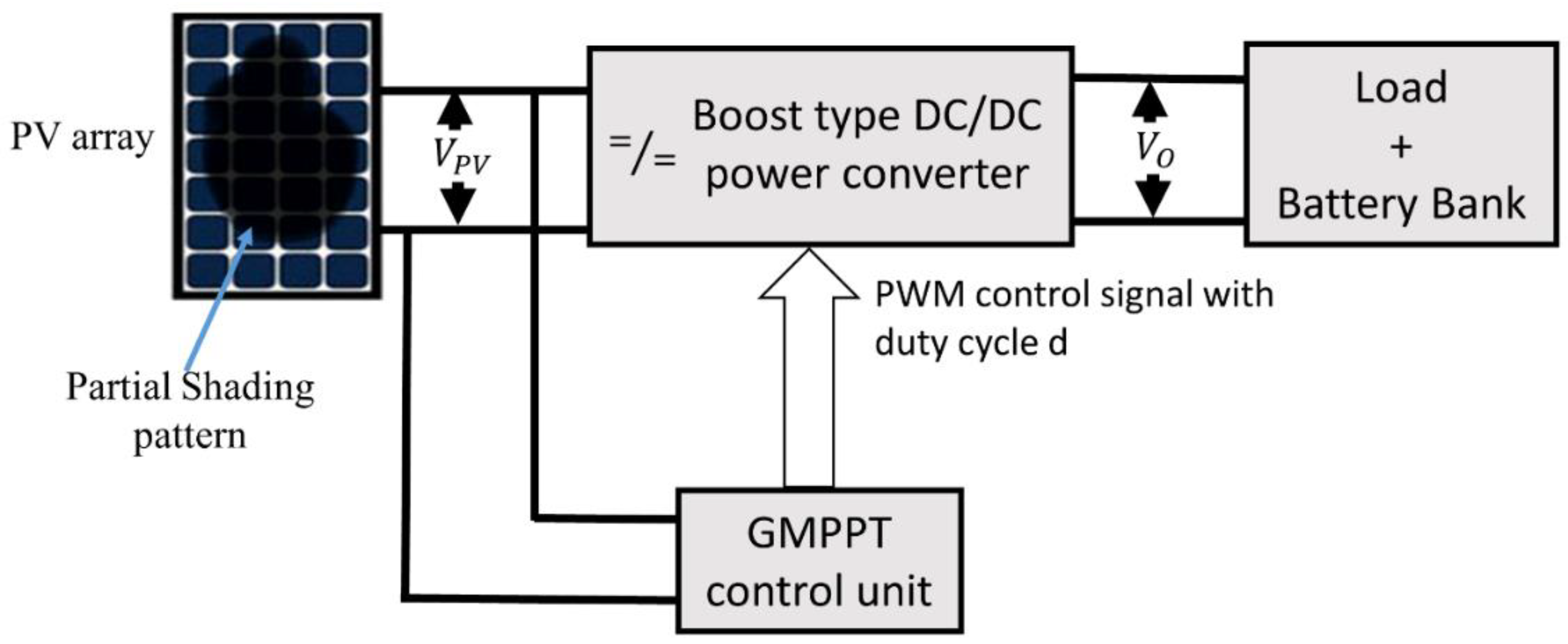
3.2. Working of GTOA as MPPT
Implementation of GTOA as MPPT
4. Results and Discussion
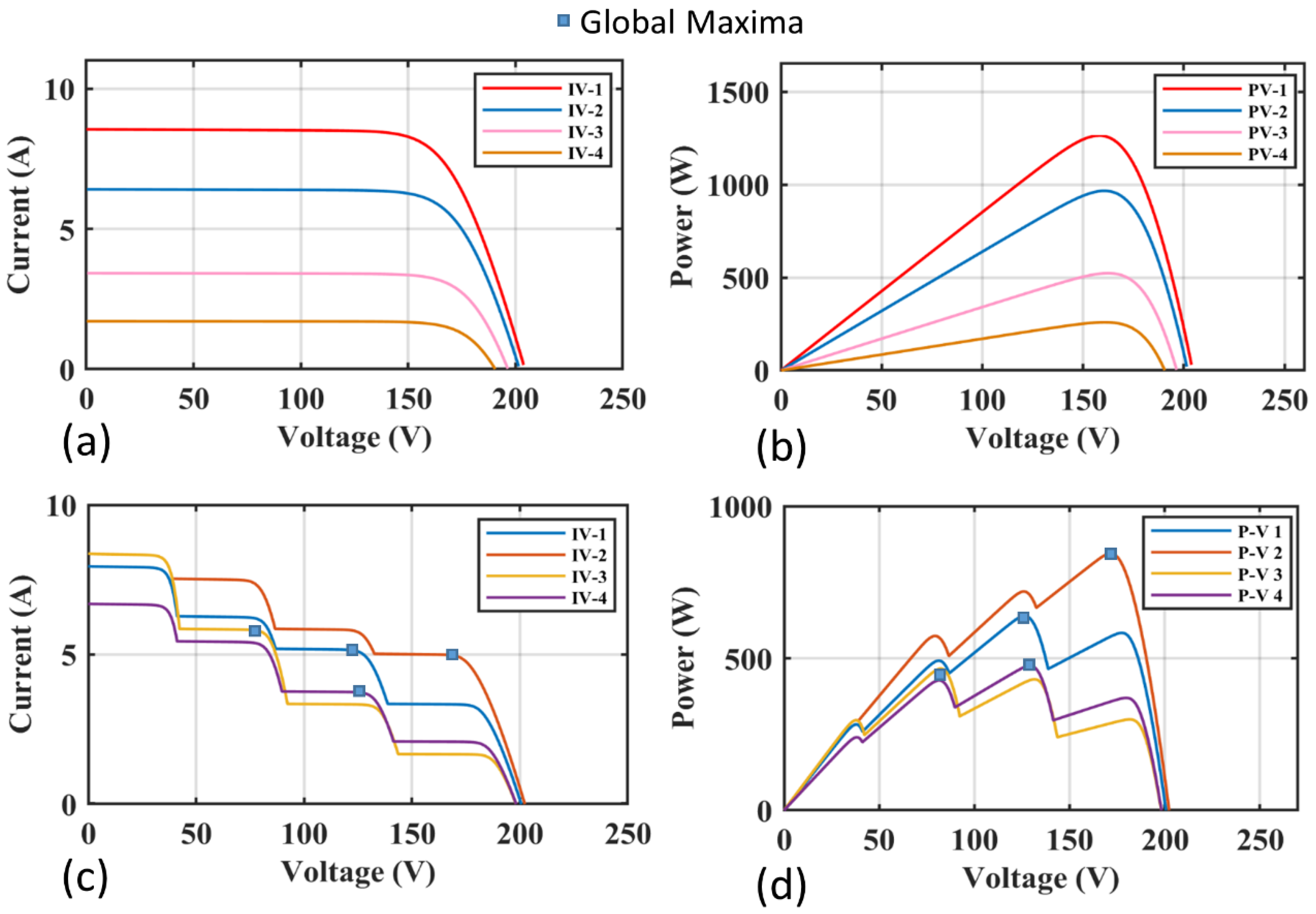
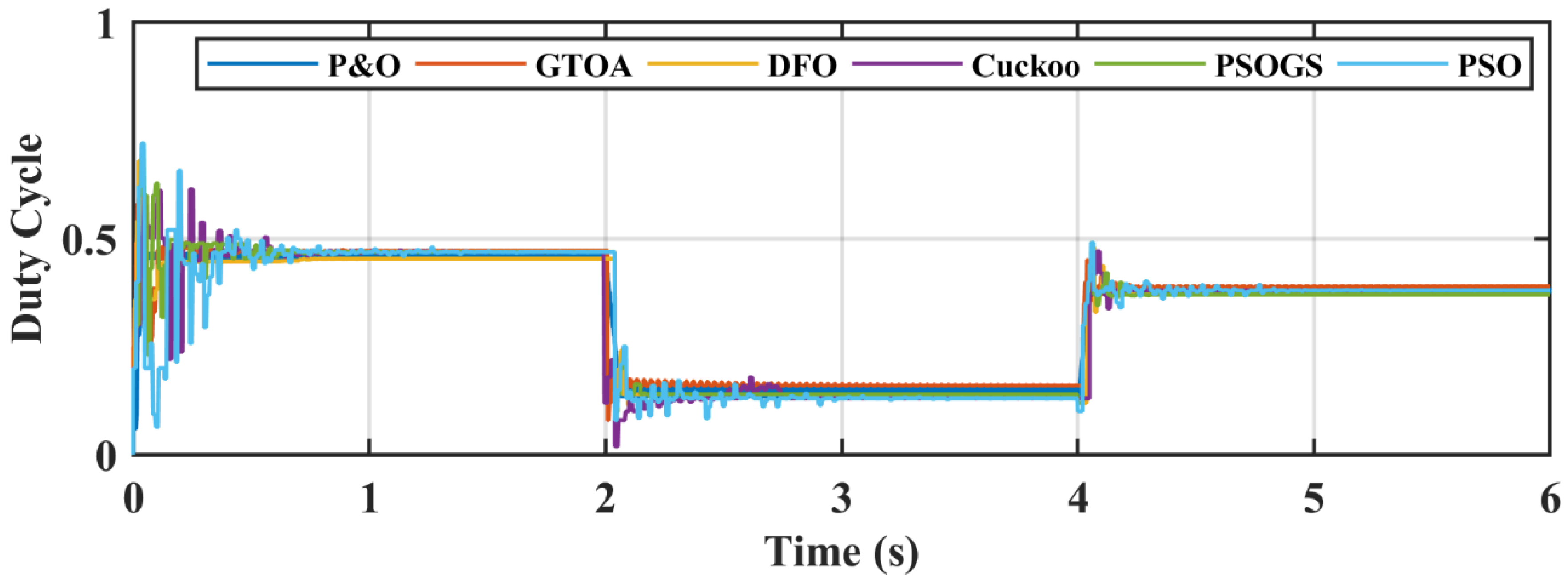
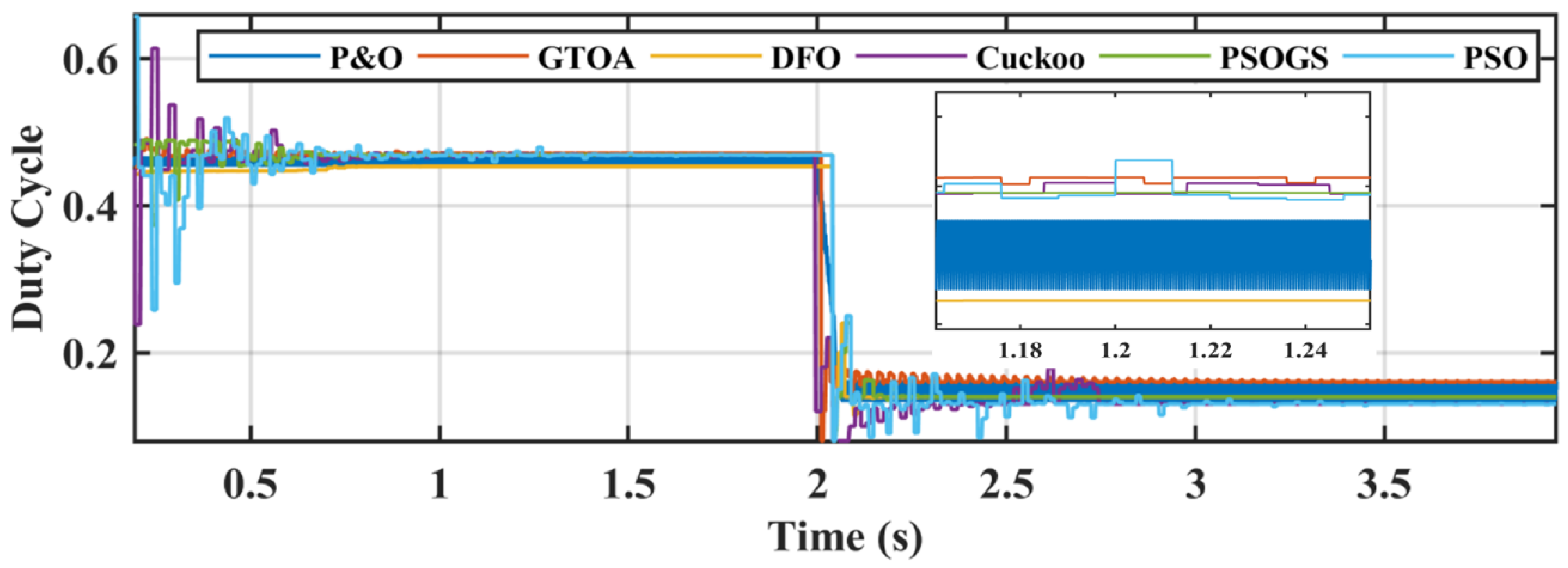
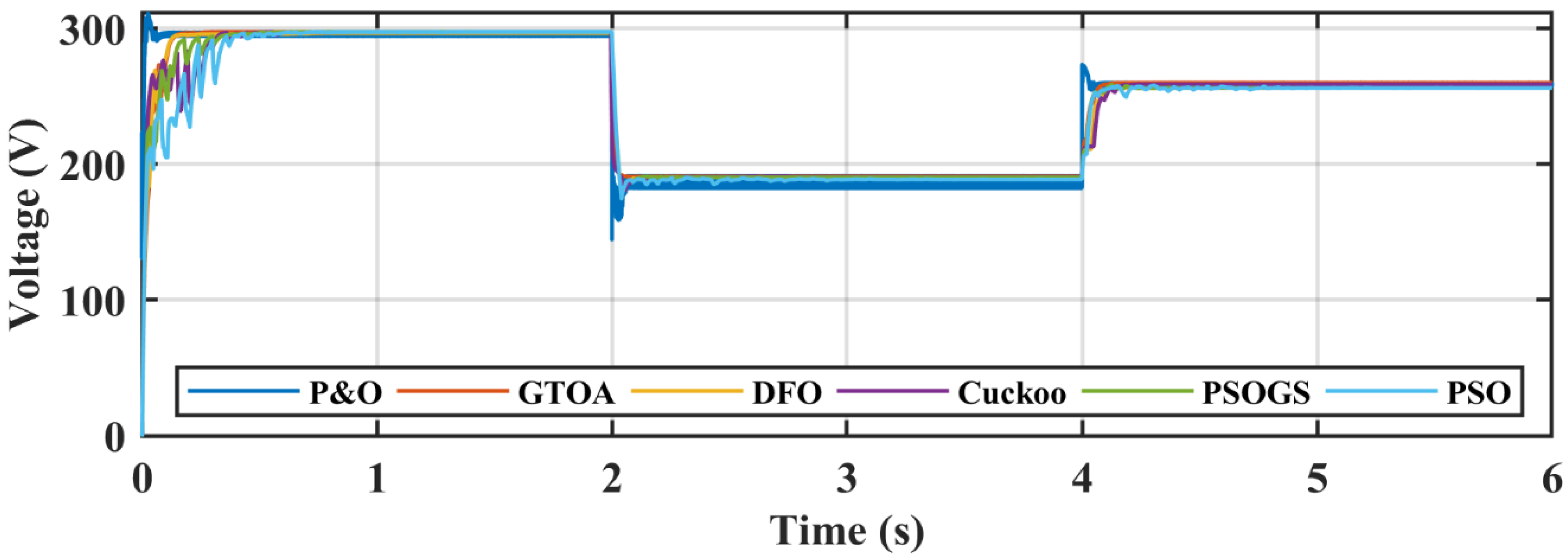
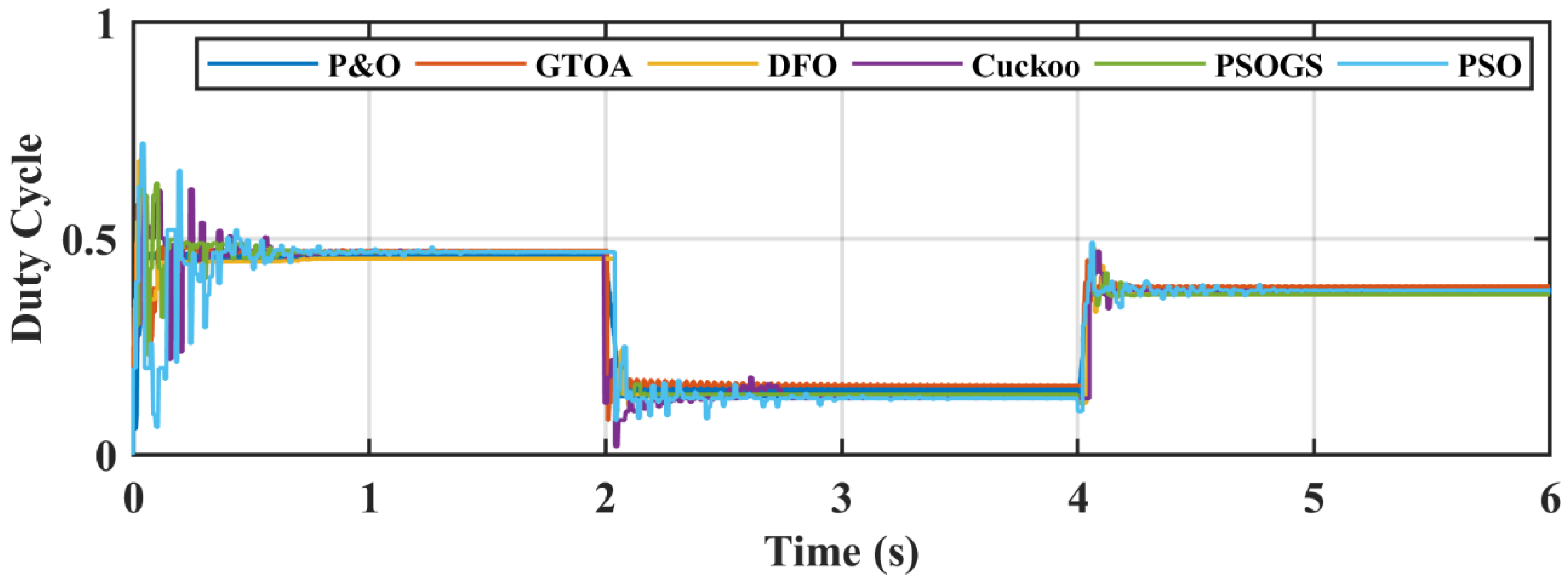
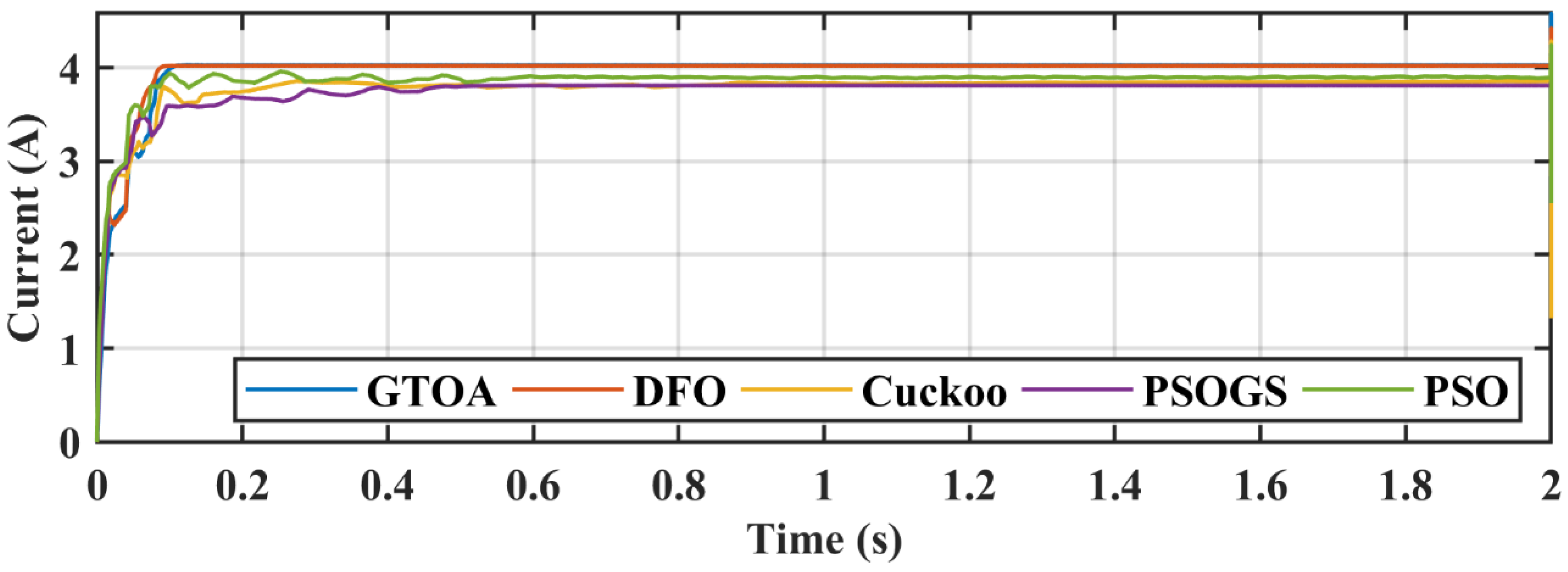
4.1. Case 1: Fast Varying Irradiance
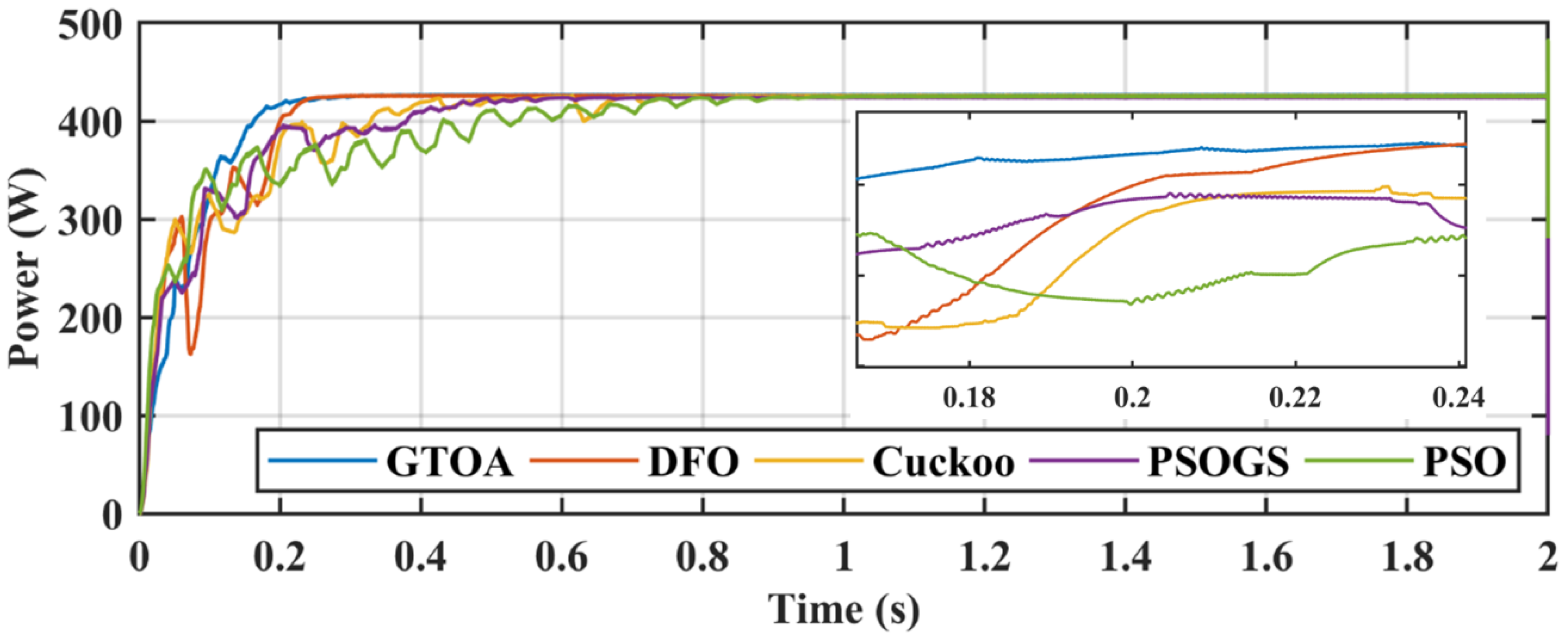
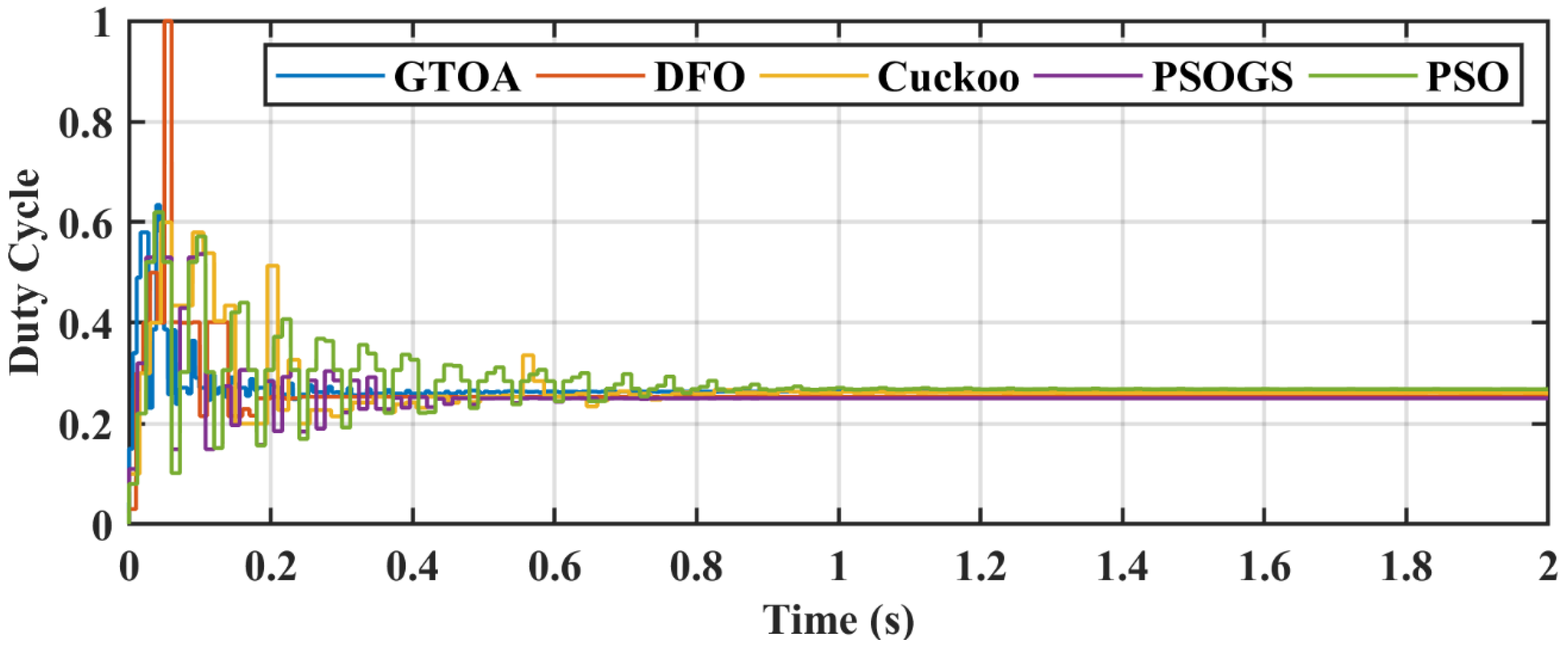
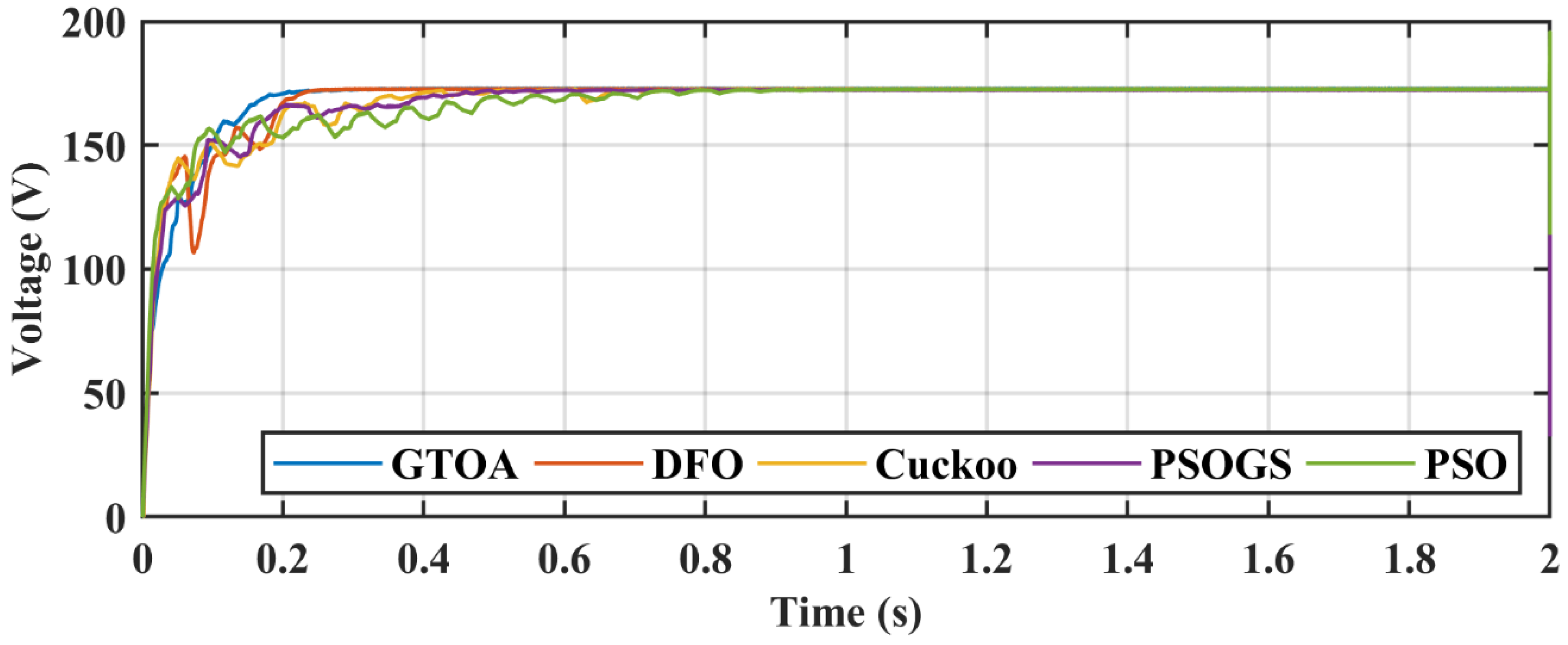
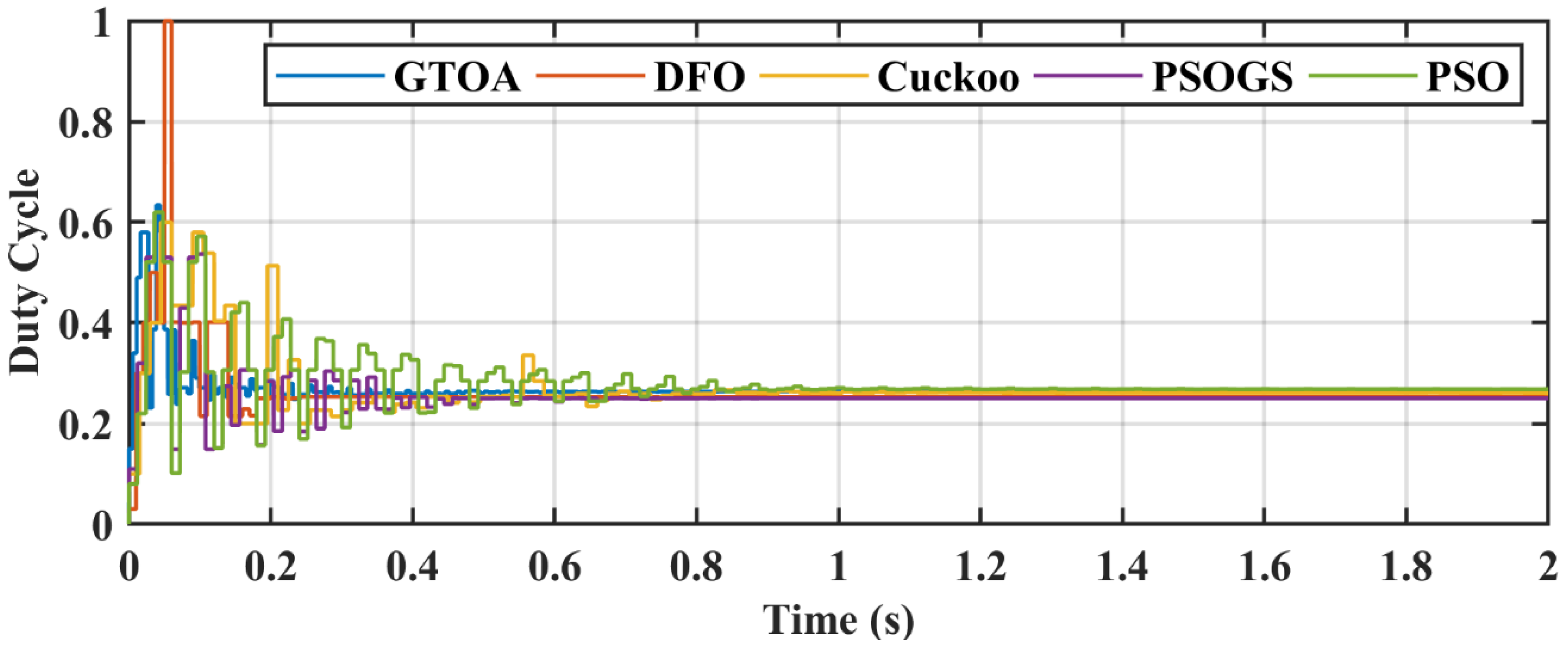
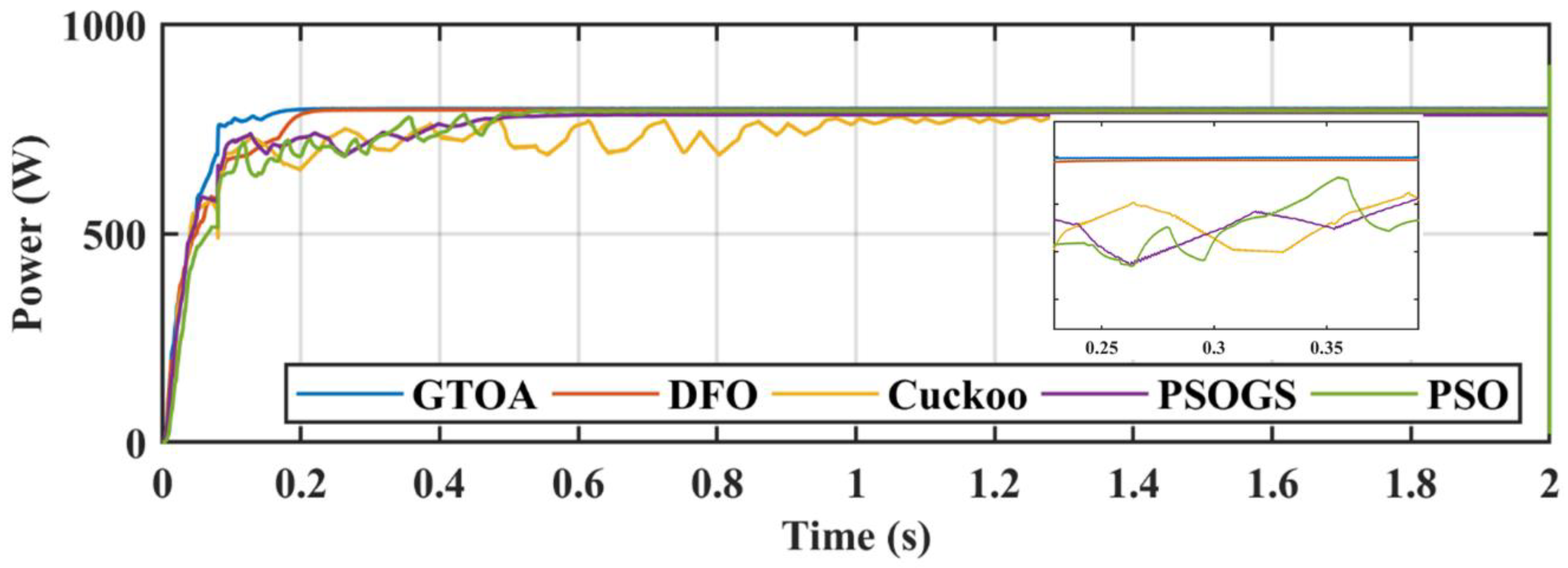
4.2. Case 2: Partial Shading
4.3. Case 3: Partial Shading
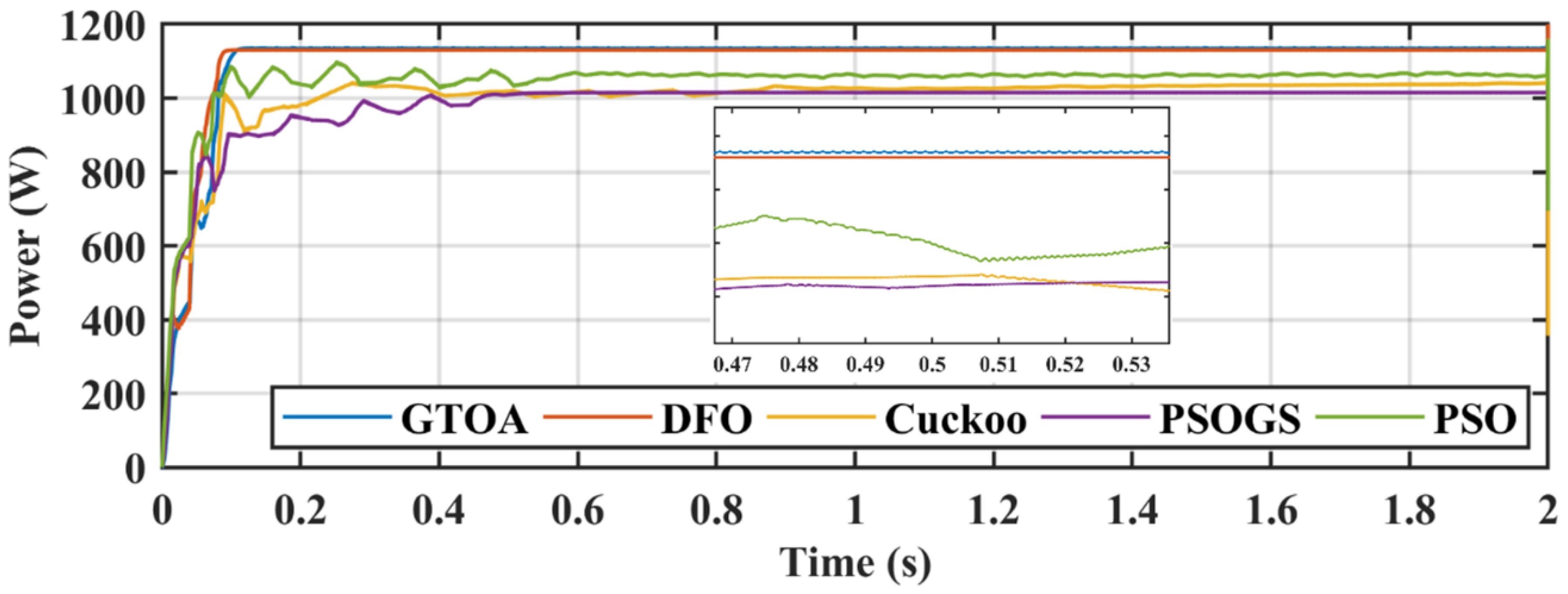
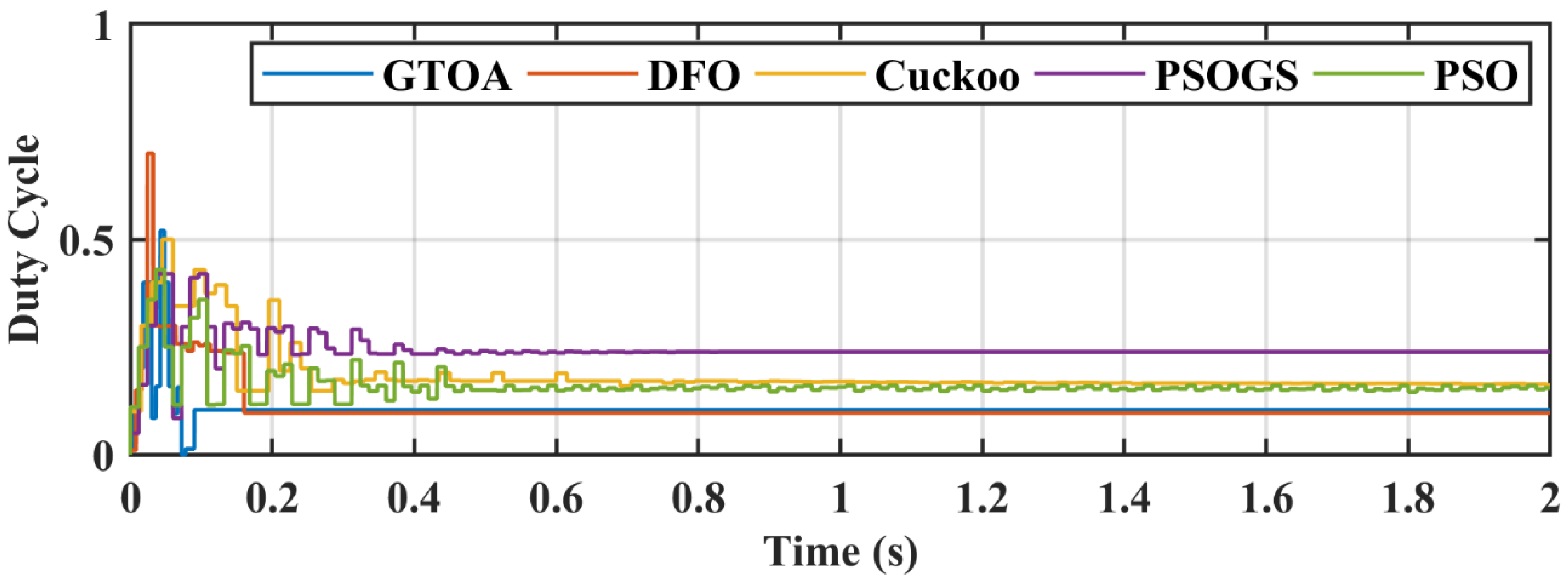
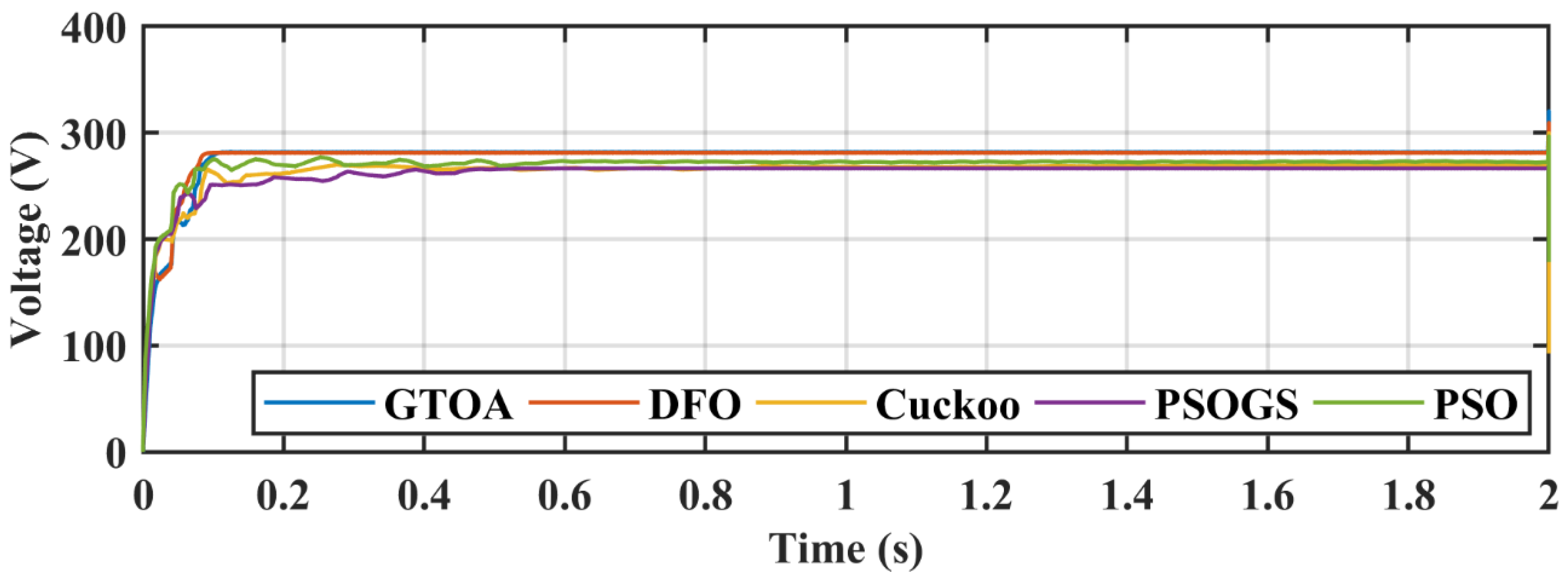
4.4. Case 4: Complex Partial Shading
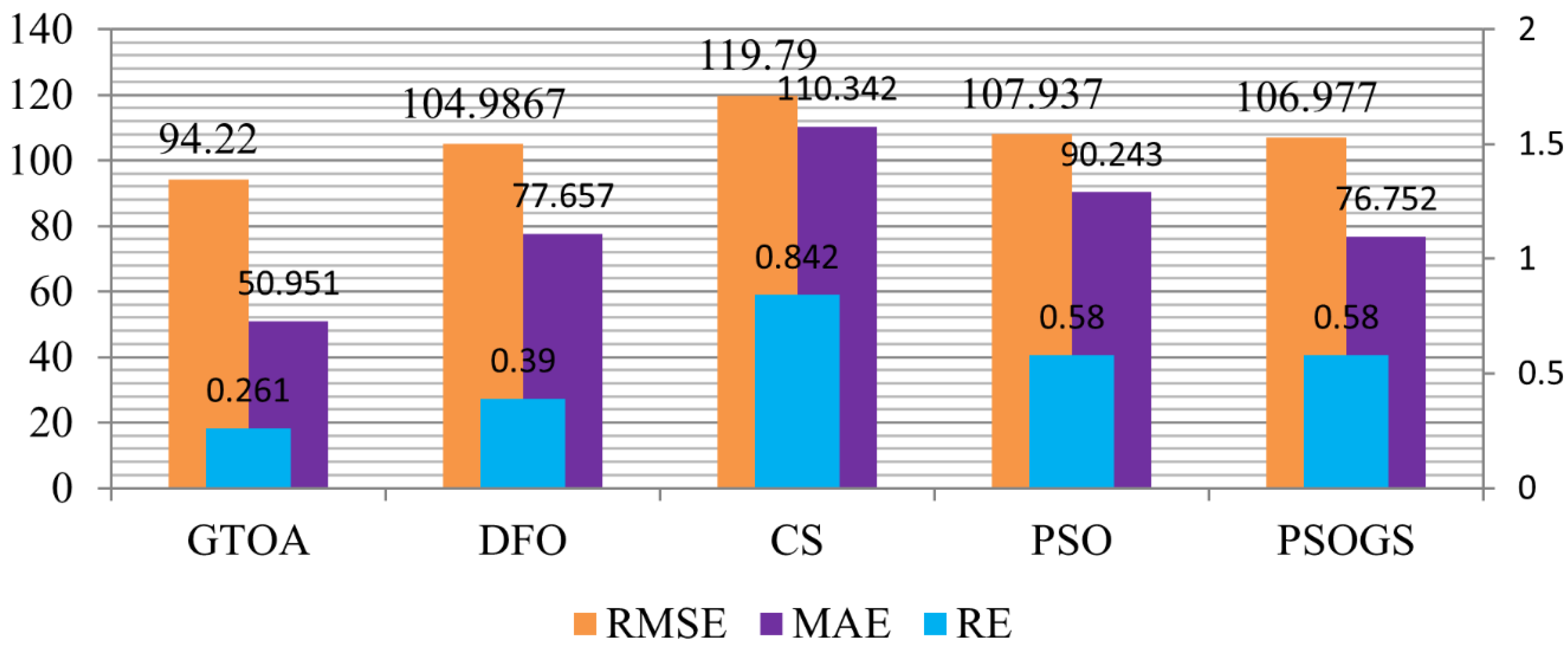
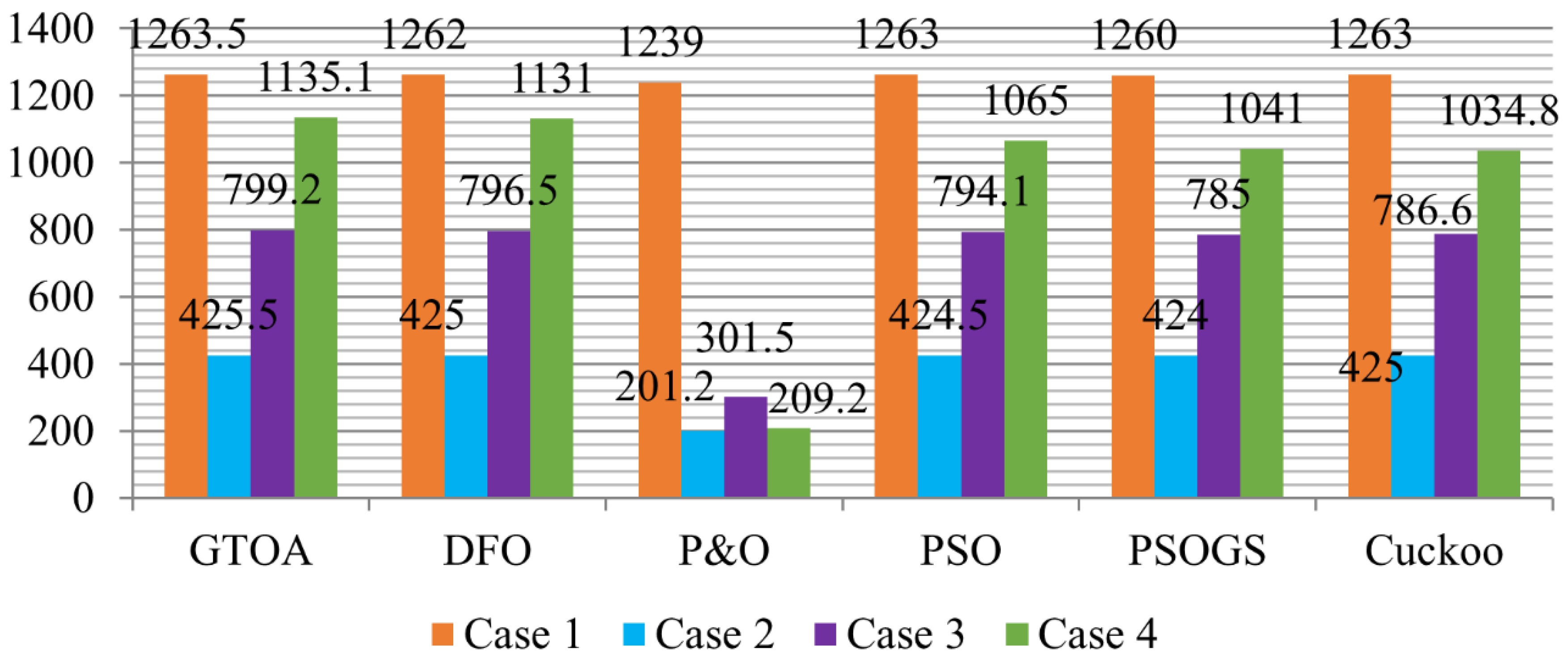
4.5. Efficiency and Performance Evaluation
Statistical Analysis
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| List of Abbreviation | |
| PS | Partial shading |
| GA | Genetic algorithm |
| ACO | Ant colony optimization |
| GTOA | Group teaching optimization algorithm |
| MPPT | Maximum power point tracking |
| DFO | Dragon fly optimization |
| PSO | Particle swarm optimization |
| GMPPT | Global maximum power point tracking |
| P&O | Perturb and observe |
| Variables | |
| Vout_dc | Converts output voltage |
| Vin_dc | Converts input voltage |
| Number of cells connected in series | |
| Cin | Input capacitor |
| Temperature of the p-n junction | |
| Inductance | |
| Cout | Output capacitor |
| Switching frequency | |
| RL | Load resistance |
| Diode ideality factor | |
| Duty cycle | |
| Reverse saturation current | |
| Thermal voltage of PV module | |
| Number of cells connected in parallel | |
| Boltzmann constant = | |
| q | Electron charge = |
| Step change | |
Appendix A
Boost Converter
Appendix B
Implementation of Group Teaching Optimization Algorithm (GTOA) as MPPT
Appendix C

References
- Irena, G.E.C. Renewable Capacity Statistics 2017; International Renewable Energy Agency: Abu Dhabi, UAE, 2017. [Google Scholar]
- D’Adamo, I.; Gastaldi, M.; Morone, P. The post COVID-19 green recovery in practice: Assessing the profitability of a policy proposal on residential photovoltaic plants. Energy Policy 2020, 147, 111910. [Google Scholar] [CrossRef]
- Li, Z.; Ji, J.; Yuan, W.; Song, Z.; Ren, X.; Uddin, M.M.; Luo, K.; Zhao, X. Experimental and numerical investigations on the performance of a G-PV/T system comparing with A-PV/T system. Energy 2020, 194, 116776. [Google Scholar] [CrossRef]
- Aziz, A.S.; Tajuddin, M.F.N.; Adzman, M.R.; Mohammed, M.F.; Ramli, M.A. Feasibility analysis of grid-connected and islanded operation of a solar PV microgrid system: A case study of Iraq. Energy 2020, 191, 116591. [Google Scholar] [CrossRef]
- Mirza, A.F.; Mansoor, M.; Ling, Q. A novel MPPT technique based on Henry gas solubility optimization. Energy Convers. Manag. 2020, 225, 113409. [Google Scholar] [CrossRef]
- Eltamaly, A.M.; Farh, H.M.H. Dynamic global maximum power point tracking of the PV systems under variant partial shading using hybrid GWO-FLC. Sol. Energy 2019, 177, 306–316. [Google Scholar] [CrossRef]
- Mirza, A.F.; Ling, Q.; Javed, M.Y.; Mansoor, M. Novel MPPT techniques for photovoltaic systems under uniform irradiance and Partial shading. Sol. Energy 2019, 184, 628–648. [Google Scholar] [CrossRef]
- Tavakoli, A.; Forouzanfar, M. A self-constructing Lyapunov neural network controller to track global maximum power point in PV systems. Int. Trans. Electr. Energy Syst. 2020, 30, e12391. [Google Scholar] [CrossRef]
- Javed, M.Y.; Mirza, A.F.; Hasan, A.; Rizvi, S.T.H.; Ling, Q.; Gulzar, M.M.; Safder, M.U.; Mansoor, M. A Comprehensive Review on a PV Based System to Harvest Maximum Power. Electronics 2019, 8, 1480. [Google Scholar] [CrossRef] [Green Version]
- Ammar, H.H.; Azar, A.T.; Shalaby, R.; Mahmoud, M.I. Metaheuristic optimization of fractional order incremental conductance (FO-INC) maximum power point tracking (MPPT). Complexity 2019, 2019, 1–13. [Google Scholar] [CrossRef]
- Lappalainen, K.; Valkealahti, S. Number of maximum power points in photovoltaic arrays during partial shading events by clouds. Renew. Energy 2020, 152, 812–822. [Google Scholar] [CrossRef]
- Melhem, M. Analyzing and modeling PV with “P&O” MPPT Algorithm by MATLAB/SIMULINK. In Proceedings of the IEEE 3rd International Symposium on Small-Scale Intelligent Manufacturing Systems (SIMS), Gjøvik, Norway, 10–12 June 2020. [Google Scholar]
- Refaat, A.; Osman, M.H.; Korovkin, N.V. Current collector optimizer topology to extract maximum power from non-uniform aged PV array. Energy 2020, 195, 116995. [Google Scholar] [CrossRef]
- Ravyts, S.; Dalla Vecchia, M.; Van den Broeck, G.; Yordanov, G.H.; Gonçalves, J.E.; Moschner, J.D.; Saelens, D.; Driesen, J. Embedded BIPV module-level DC/DC converters: Classification of optimal ratings. Renew. Energy 2020, 146, 880–889. [Google Scholar] [CrossRef]
- Pathak, D.; Sagar, G.; Gaur, P. An Application of Intelligent Non-linear Discrete-PID Controller for MPPT of PV System. Procedia Comput. Sci. 2020, 167, 1574–1583. [Google Scholar] [CrossRef]
- Motahhir, S.; El Hammoumi, A.; El Ghzizal, A. The most used MPPT algorithms: Review and the suitable low-cost embedded board for each algorithm. J. Clean. Prod. 2020, 246, 118983. [Google Scholar] [CrossRef]
- Renaudineau, H.; Donatantonio, F.; Fontchastagner, J.; Petrone, G.; Spagnuolo, G.; Martin, J.P.; Pierfederici, S. A PSO-based global MPPT technique for distributed PV power generation. IEEE Trans. Ind. Electron. 2014, 62, 1047–1058. [Google Scholar] [CrossRef]
- Ishaque, K.; Salam, Z.; Amjad, M.; Mekhilef, S. An improved particle swarm optimization (PSO)-based MPPT for PV with reduced steady-state oscillation. IEEE Trans. Power Electron. 2012, 27, 3627–3638. [Google Scholar] [CrossRef]
- Soufyane Benyoucef, A.; Chouder, A.; Kara, K.; Silvestre, S. Artificial bee colony based algorithm for maximum power point tracking (MPPT) for PV systems operating under partial shaded conditions. Appl. Soft Comput. 2015, 32, 38–48. [Google Scholar] [CrossRef] [Green Version]
- Lyden, S.; Haque, M.E. A simulated annealing global maximum power point tracking approach for PV modules under partial shading conditions. IEEE Trans. Power Electron. 2015, 31, 4171–4181. [Google Scholar] [CrossRef]
- Ahmed, J.; Salam, Z. A Maximum Power Point Tracking (MPPT) for PV system using Cuckoo Search with partial shading capability. Appl. Energy 2014, 119, 118–130. [Google Scholar] [CrossRef]
- Ma, J.; Ting, T.O.; Man, K.L.; Zhang, N.; Guan, S.U.; Wong, P.W. Parameter estimation of photovoltaic models via cuckoo search. J. Appl. Math. 2013, 2013. [Google Scholar] [CrossRef]
- Priyadarshi, N.; Ramachandaramurthy, V.K.; Padmanaban, S.; Azam, F. An ant colony optimized MPPT for standalone hybrid PV-wind power system with single Cuk converter. Energies 2019, 12, 167. [Google Scholar] [CrossRef] [Green Version]
- Bouakkaz, M.S.; Boukadoum, A.; Boudebbouz, O.; Fergani, N.; Boutasseta, N.; Attoui, I.; Bouraiou, A.; Necaibia, A. Dynamic performance evaluation and improvement of PV energy generation systems using Moth Flame Optimization with combined fractional order PID and sliding mode controller. Sol. Energy 2020, 199, 411–424. [Google Scholar] [CrossRef]
- Mohanty, S.; Subudhi, B.; Ray, P.K. A new MPPT design using grey wolf optimization technique for photovoltaic system under partial shading conditions. IEEE Trans. Sustain. Energy 2015, 7, 181–188. [Google Scholar] [CrossRef]
- Javed, M.Y.; Murtaza, A.F.; Ling, Q.; Qamar, S.; Gulzar, M.M. A novel MPPT design using generalized pattern search for partial shading. Energy Build. 2016, 133, 59–69. [Google Scholar] [CrossRef]
- Mansoor, M.; Mirza, A.F.; Ling, Q. Harris hawk optimization-based MPPT control for PV Systems under Partial Shading Conditions. J. Clean. Prod. 2020, 274, 122857. [Google Scholar] [CrossRef]
- Feroz Mirza, A.; Mansoor, M.; Ling, Q.; Khan, M.I.; Aldossary, O.M. Advanced Variable Step Size Incremental Conductance MPPT for a Standalone PV System Utilizing a GA-Tuned PID Controller. Energies 2020, 13, 4153. [Google Scholar] [CrossRef]
- Mirza, A.F.; Mansoor, M.; Ling, Q.; Yin, B.; Javed, M.Y. A Salp-Swarm Optimization based MPPT technique for harvesting maximum energy from PV systems under partial shading conditions. Energy Convers. Manag. 2020, 209, 112625. [Google Scholar] [CrossRef]
- Mansoor, M.; Mirza, A.F.; Ling, Q.; Javed, M.Y. Novel Grass Hopper optimization based MPPT of PV systems for complex partial shading conditions. Sol. Energy 2020, 198, 499–518. [Google Scholar] [CrossRef]
- Zhang, Y.; Jin, Z. Group teaching optimization algorithm: A novel metaheuristic method for solving global optimization problems. Expert Syst. Appl. 2020, 148, 113246. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Maximum Power Pmpp | 316 |
| Short Circuit Voltage Voc | 51.1 |
| Voltage at MP Vmpp | 39.5 |
| Short Circuit Current Isc | 8.5 |
| Current at MP Impp | 8 |
| No. of Cells Ns | 72 |
| Shunt resistance | 805.8807 Ω |
| Series resistance | 0.6912 Ω |
| Case Study | Pmax (Watts) | ||||
|---|---|---|---|---|---|
| PV1 | PV2 | PV3 | PV4 | ||
| Case 1 | 1,000,400,750 | 1,000,450,750 | 1,000,400,750 | 1,000,400,750 | 1,264,530,970 |
| Case 2 | 650 | 520 | 250 | 400 | 427 |
| Case 3 | 720 | 1000 | 850 | 550 | 799.8 |
| Case | Pmax | |||
|---|---|---|---|---|
| Case 4 | PV1:350 | PV5:370 | PV9:650 | Pmax = 1136 W |
| PV2:250 | PV6:450 | PV10:600 | ||
| PV3:310 | PV7:490 | PV11:750 | ||
| PV4:180 | PV8:570 | PV12:850 | ||
| Tech. Technique | Case No. | Convergence Time (s) | Settling Time (s) | GM Located | Power at GM (W) | Power Tracked (W) | Effie. (%) |
|---|---|---|---|---|---|---|---|
| GTOA | Case 1 | 0.135 | 0.220 | Yes | 1264 | 1263.5 | 99.96 |
| Case 2 | 0.145 | 0.225 | Yes | 427 | 425.5 | 99.85 | |
| Case 3 | 0.148 | 0.250 | Yes | 800 | 799.2 | 99.92 | |
| Case 4 | 0.152 | 0.23 | Yes | 1136 | 1135.1 | 99.97 | |
| DFO | Case 1 | 0.155 | 0.240 | Yes | 1264 | 1262 | 99.84 |
| Case 2 | 0.186 | 0.238 | Yes | 427 | 425 | 99.64 | |
| Case 3 | 0.205 | 0.26 | Yes | 800 | 796.5 | 99.58 | |
| Case 4 | 0.190 | 0.24 | Yes | 1136 | 1131 | 99.93 | |
| P & O | Case 1 | 0.10 | 0.10 | Yes | 1264 | 1239 | 98.02 |
| Case 2 | LM | LM | No | 427 | 201.2 | 47.11 | |
| Case 3 | LM | LM | No | 800 | 301.5 | 37.68 | |
| Case 4 | LM | LM | No | 1136 | 209.2 | 18.45 | |
| PSO | Case 1 | 0.41 | 0.90 | Yes | 1264 | 1263 | 99.92 |
| Case 2 | 0.49 | 0.90 | Yes | 427 | 424.5 | 99.39 | |
| Case 3 | 0.30 | 0.57 | Yes | 800 | 794.1 | 99.30 | |
| Case 4 | 0.32 | 0.61 | No | 1136 | 1065 | 93.75 | |
| PSOGS | Case 1 | 0.34 | 0.62 | Yes | 1264 | 1260 | 99.68 |
| Case 2 | 0.35 | 0.59 | Yes | 427 | 424 | 99.29 | |
| Case 3 | 0.39 | 0.60 | Yes | 800 | 785 | 98.14 | |
| Case 4 | 0.45 | 0.60 | No | 1136 | 1041 | 91.63 | |
| CS | Case 1 | 0.31 | 0.71 | Yes | 1264 | 1263 | 99.92 |
| Case 2 | 0.27 | 0.69 | Yes | 427 | 425 | 99.57 | |
| Case 3 | 0.45 | 1.20 | Yes | 800 | 786.6 | 98.34 | |
| Case 4 | 0.29 | 0.80 | No | 1136 | 1034.8 | 91.09 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zafar, M.H.; Al-shahrani, T.; Khan, N.M.; Feroz Mirza, A.; Mansoor, M.; Qadir, M.U.; Khan, M.I.; Naqvi, R.A. Group Teaching Optimization Algorithm Based MPPT Control of PV Systems under Partial Shading and Complex Partial Shading. Electronics 2020, 9, 1962. https://doi.org/10.3390/electronics9111962
Zafar MH, Al-shahrani T, Khan NM, Feroz Mirza A, Mansoor M, Qadir MU, Khan MI, Naqvi RA. Group Teaching Optimization Algorithm Based MPPT Control of PV Systems under Partial Shading and Complex Partial Shading. Electronics. 2020; 9(11):1962. https://doi.org/10.3390/electronics9111962
Chicago/Turabian StyleZafar, Muhammad Hamza, Thamraa Al-shahrani, Noman Mujeeb Khan, Adeel Feroz Mirza, Majad Mansoor, Muhammad Usman Qadir, Muhammad Imran Khan, and Rizwan Ali Naqvi. 2020. "Group Teaching Optimization Algorithm Based MPPT Control of PV Systems under Partial Shading and Complex Partial Shading" Electronics 9, no. 11: 1962. https://doi.org/10.3390/electronics9111962
APA StyleZafar, M. H., Al-shahrani, T., Khan, N. M., Feroz Mirza, A., Mansoor, M., Qadir, M. U., Khan, M. I., & Naqvi, R. A. (2020). Group Teaching Optimization Algorithm Based MPPT Control of PV Systems under Partial Shading and Complex Partial Shading. Electronics, 9(11), 1962. https://doi.org/10.3390/electronics9111962