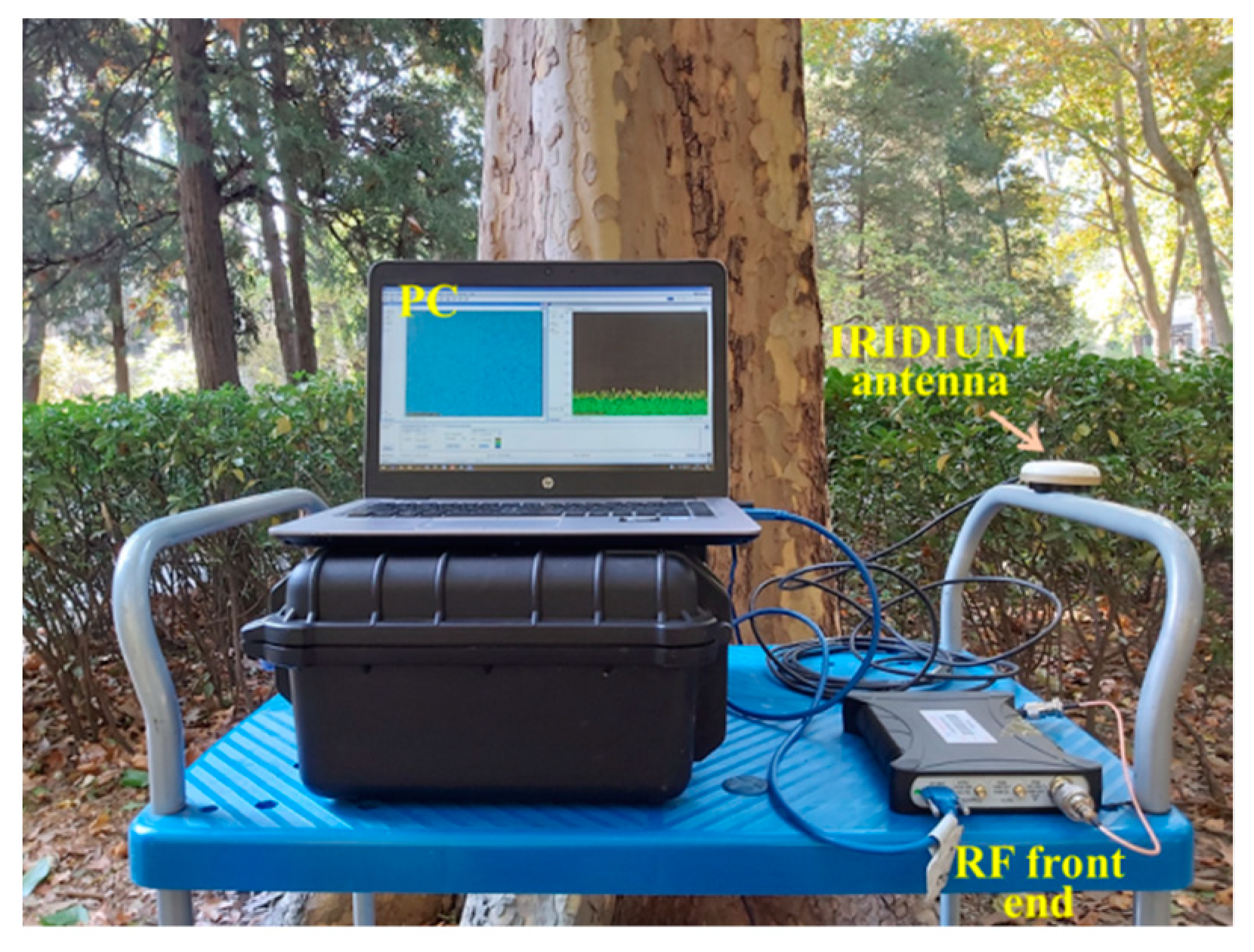
In this section, we present some experimental results based on real Iridium data collected in the weak signal environment. The IRIDIUM NEXT data are collected by a static receiver under a dense forest of BUAA university for 30 min, as shown in
Figure 4. The Iridium signals are sent into the software in PC for analyzing and positioning after down-conversion and conversion from analog to digital signals by a RF front end and an Iridium antenna. Compared with the open sky environment, the average power loss of the Iridium signal in this case reaches 8 dB. The IF data collector receives the raw data with a sampling rate of 112 MHz at a RF center frequency of 1626.25 MHz, and the center frequency of the recorded data is 28.25 MHz. The received signals are from two downlink-only channels which are ring alert signal (7 channel) and primary message signal (11 channel). Two channel signals are used for positioning, respectively. The results of Iridium signal Doppler-shift estimation and Iridium SOPs positioning are presented, as described below.
5.1. Estimating Doppler-Shift of Iridium Satellite Signal in Weak Signal Environment
In this section, we will show the Doppler-shift estimation results of the real IRIDIUM NEXT signals by the new QSA-IDE algorithm. The Iridium 7 channel simplex signal, ring alert, can be obtained after filtering the IF data from RFFN. The signal standard frequency is 1626.270833 MHz and the corresponding IF is 28.270833 MHz. We first give the Iridium signal time-domain plot, then Doppler-shift estimation results are carried out.
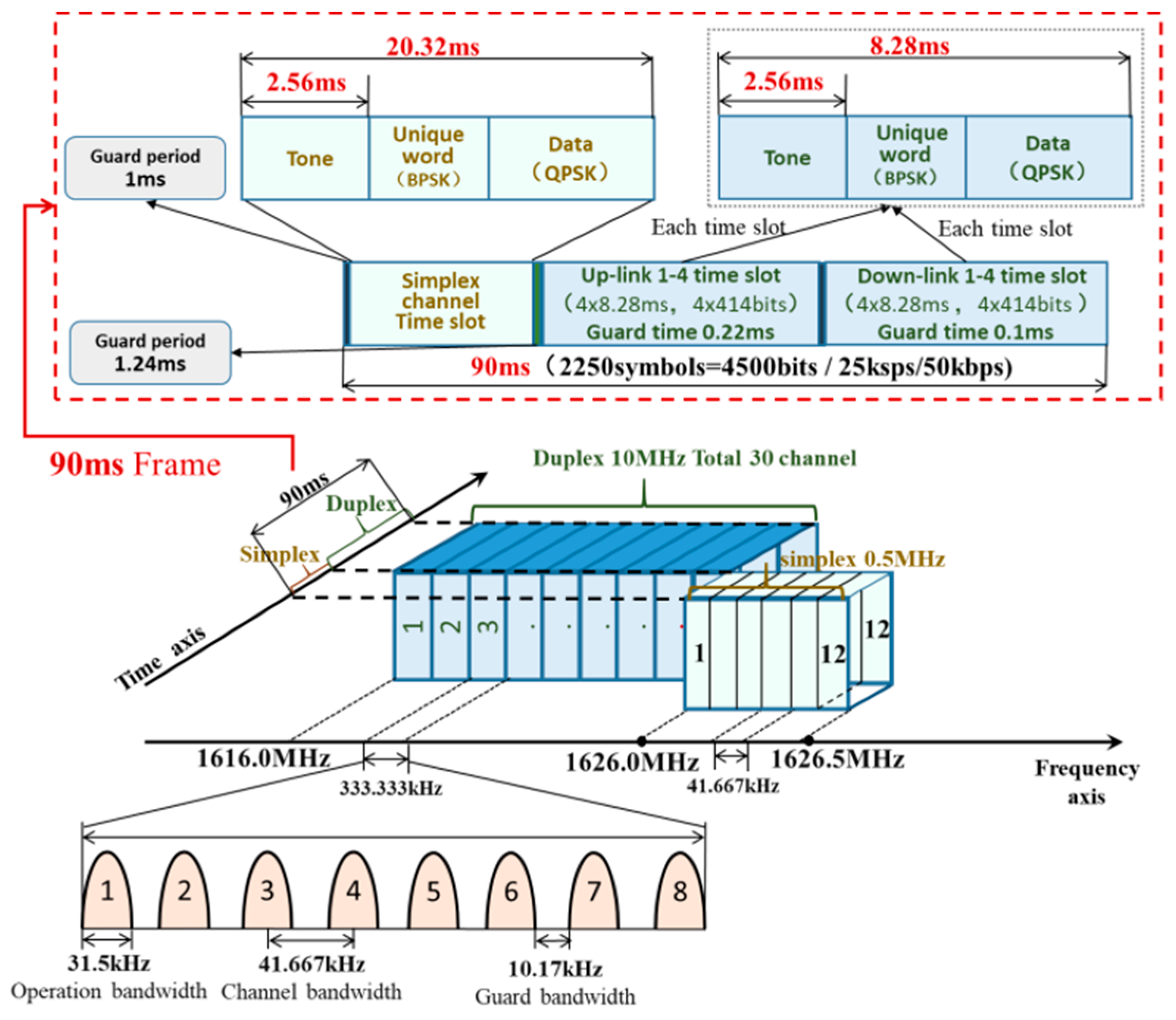
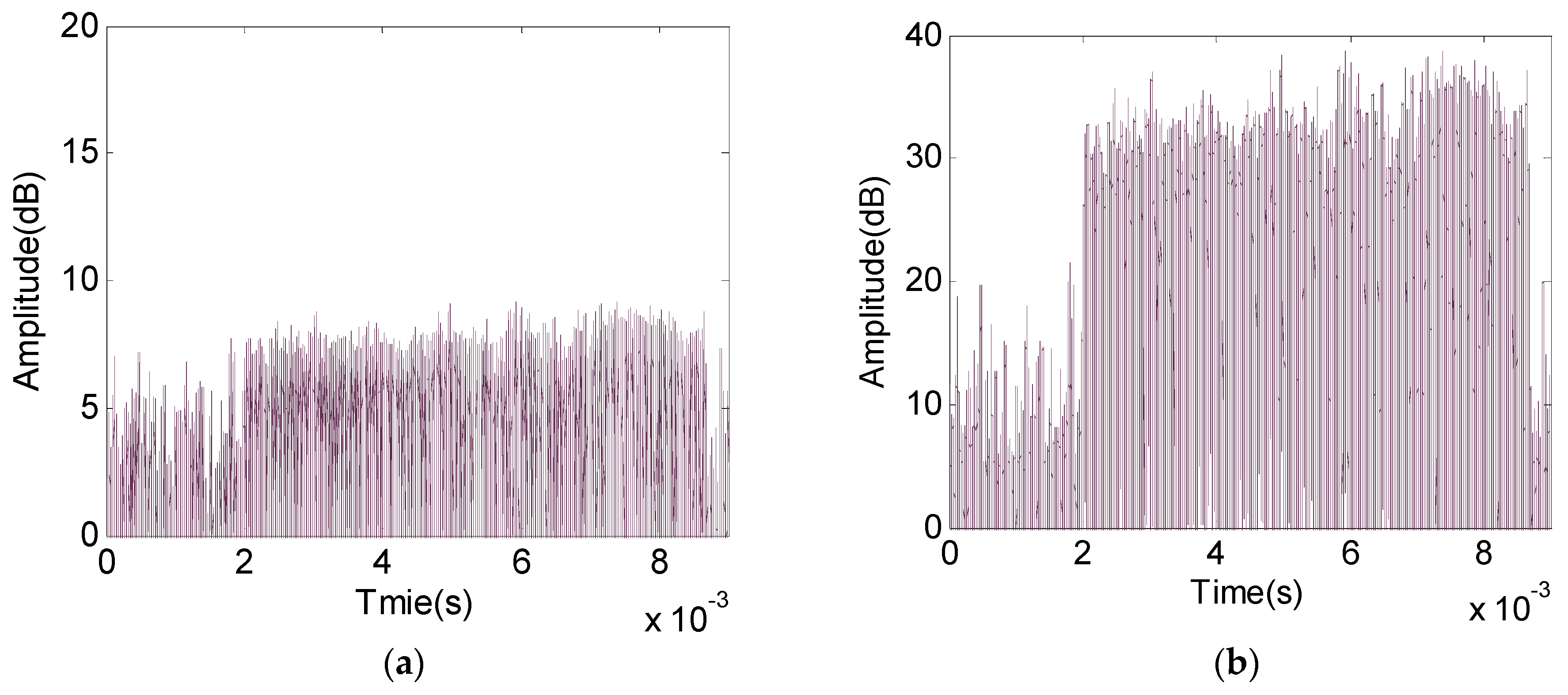
The Iridium signals are the discontinuous burst signals. The time length of the most bursts is about 6.5 ms, and the maximum time length is 20.32 ms. The time domain plot of a 9 ms collected signal after filtering (the filter bandwidth is corresponding to the Iridium ring alert signal bandwidth) is shown in
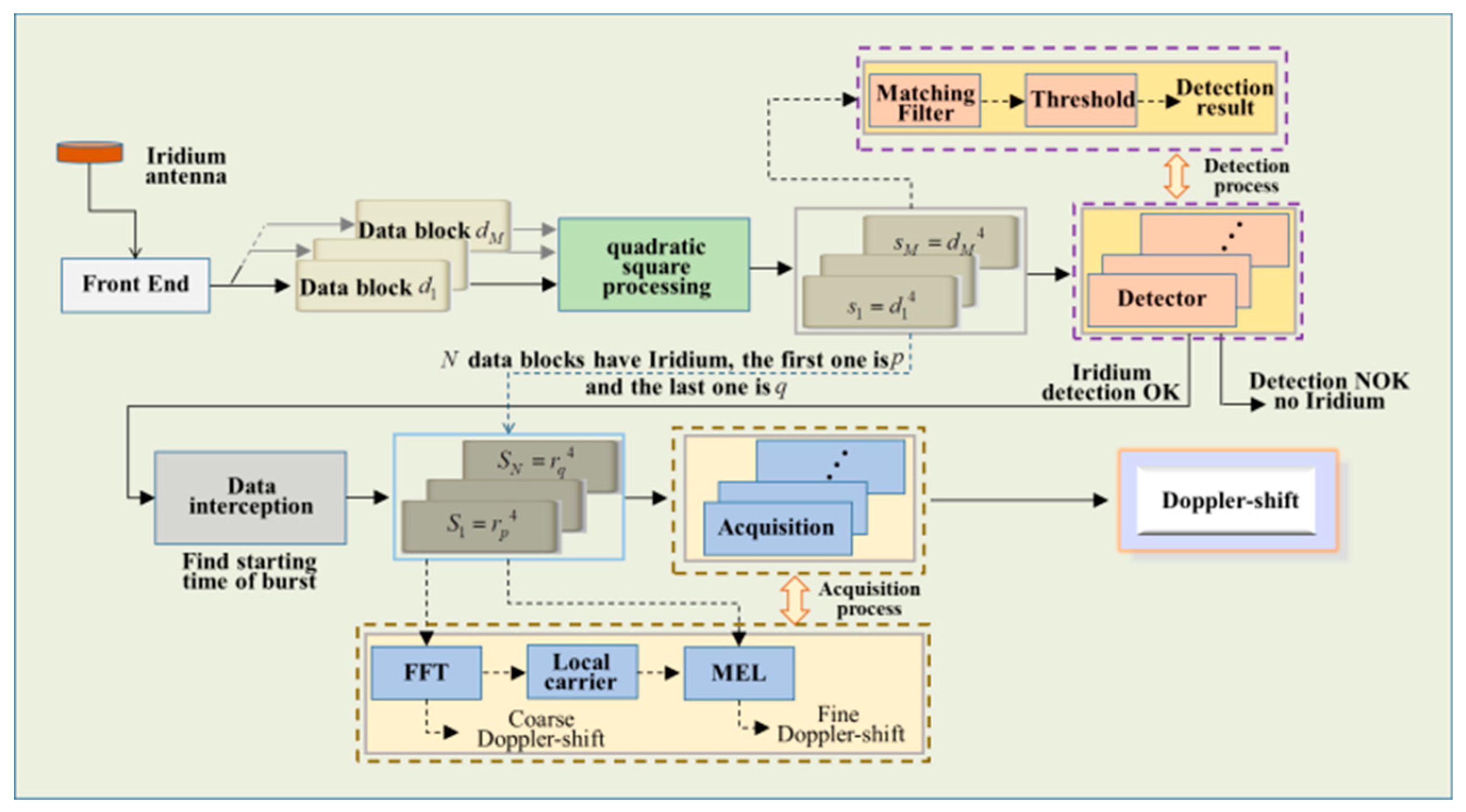
Figure 5a. An Iridium burst signal exists in this 9 ms data. The first 2 ms data is the pure noise signal, then the following 6.6 ms data is the Iridium burst signal, the last 0.4 ms data is the pure noise signal. The amplitude of the Iridium signal is not significantly higher than for noise since the power of the Iridium signal is decreased due to the occlusion environment. The Doppler-shift of this Iridium signal cannot be obtained by the traditional Doppler-shift estimation method since the signal fails to detect, even the tone signal of the Iridium signal that is used by traditional Doppler-shift estimation method cannot be correctly locked. As a result, the Doppler-shift cannot be estimated by the traditional method in weak signal environment. However, Doppler-shift can be estimated by the QSA-IDE algorithm proposed above. The first step of the new method is the quadratic square processing, this can be finished by Equations (1)–(7). Squaring this 9 ms data twice, that is, to multiply it by itself three times. The time domain plot of the quadratic square data after filtering is shown in
Figure 5b. It can be seen that the power of the quadratic square Iridium signal is stronger than for noise signal power. The signal-to-noise ratio is very optimistic after quadratic square processing. The quadratic square Iridium signal near the baseband after filtering can be used for Doppler-shift estimation once it was detected by the matched filter. The Doppler-shift estimation result is shown in the following.
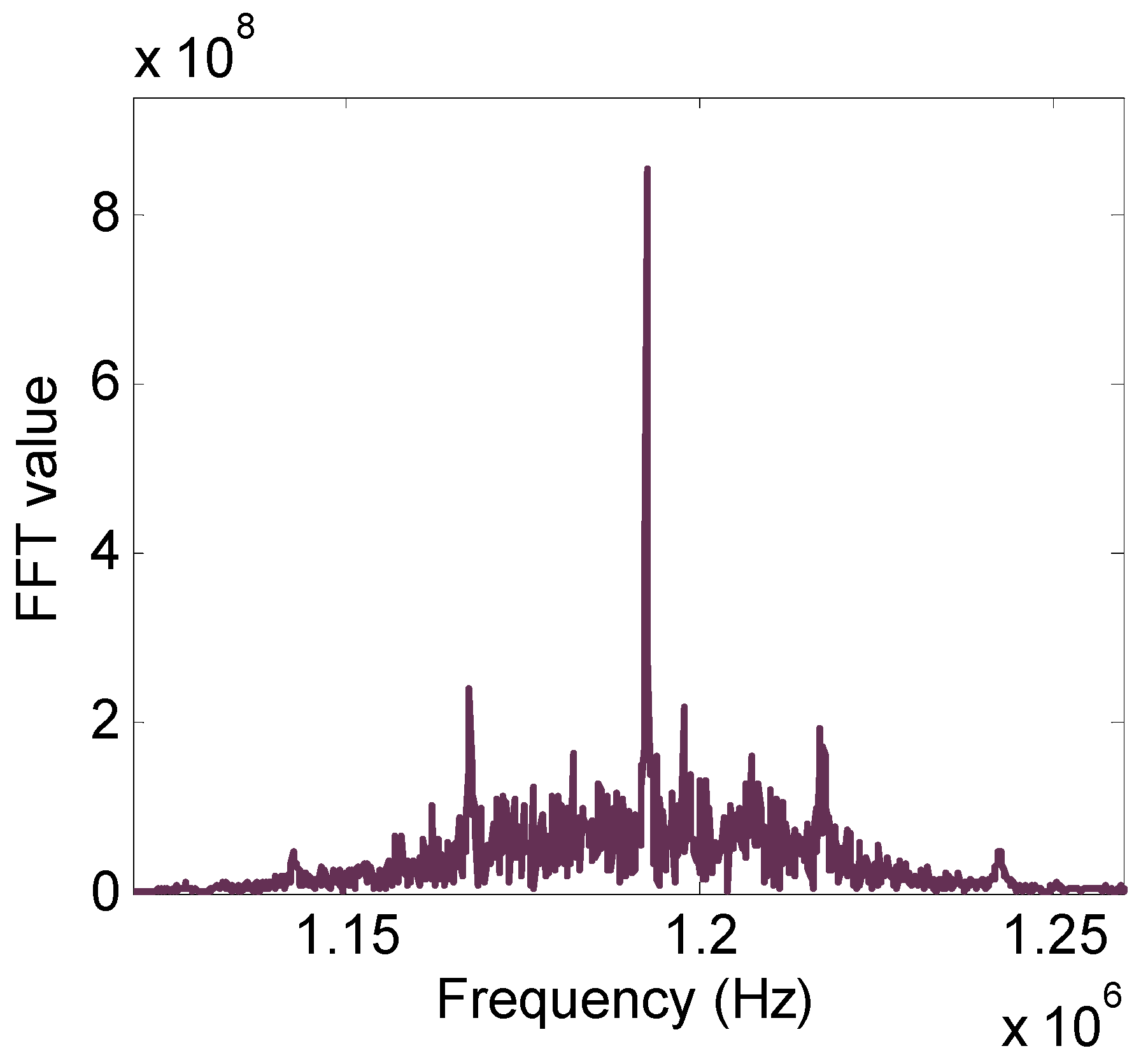
After detecting the quadratic square Iridium signal and locking the starting time, the quadratic square Iridium signal is intercepted and sent into the FFT process module. The FFT results of the quadratic square signal are shown in
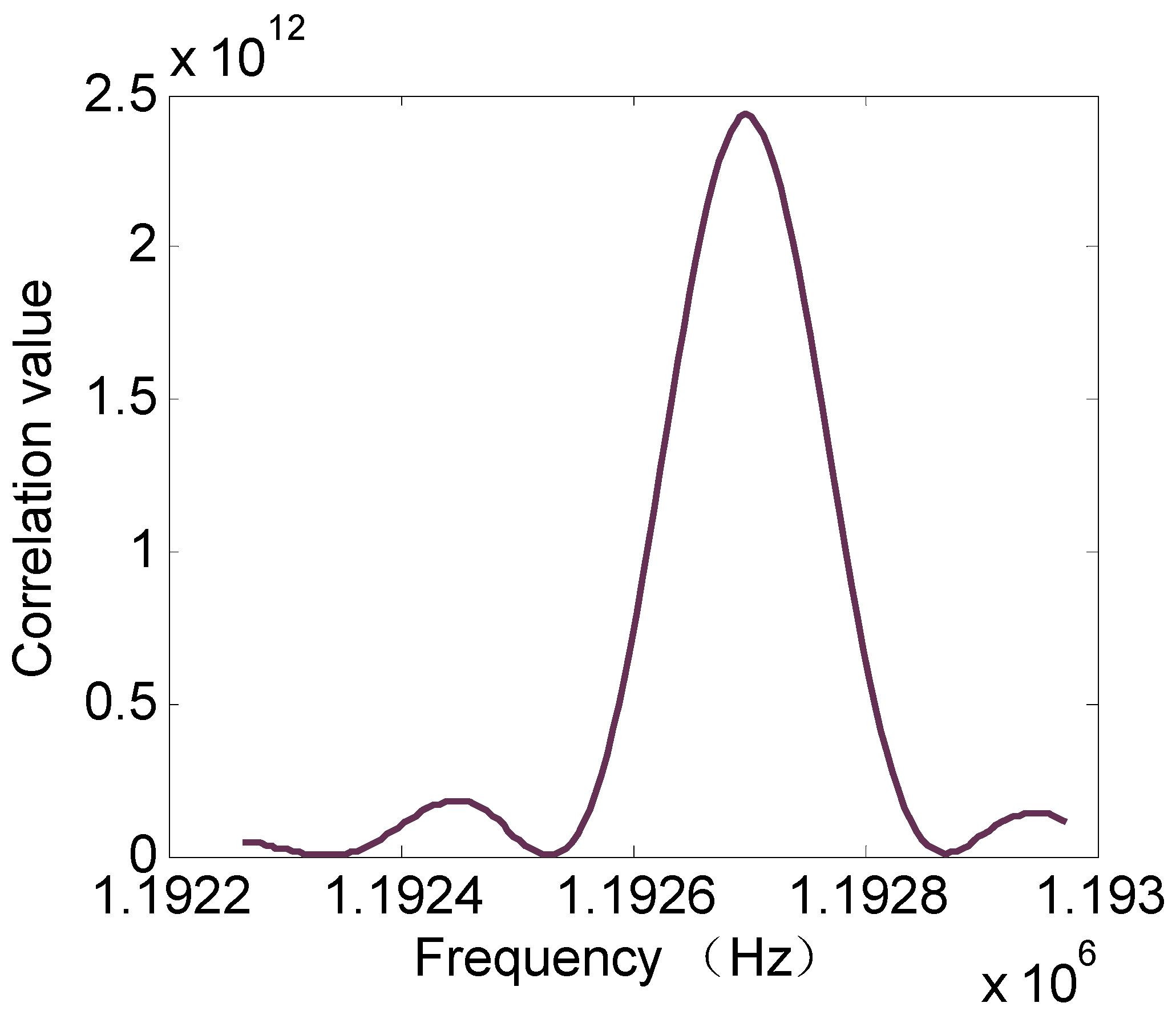
Figure 6. The center frequency of the quadratic square Iridium signal is about 1,192,618.629174 Hz. With the help of the standard frequency of ring alert, we can get the Doppler-shift coarse estimation. However, the Doppler-shift fine estimation is necessary since the error of the Doppler-shift coarse estimation caused by the FFT resolution is insupportable. Generating a local carrier based on the FFT results according to Equation (9). Let it correlate with the quadratic square signal according to Equation (10). The fine center frequency of the quadratic square Iridium signal can be received by using the MLE discussed above. The correlation results can be obtained by Equations (11)–(15), and are shown in
Figure 7. The frequency corresponding to the correlation peak is 1,192,697.914173989 Hz, which means the fine frequency estimation of the quadratic square Iridium signal is obtained. The real quadratic square signal of ring alert near the baseband is 1,083,332 Hz. Then, the Doppler-shift of this ring alert burst signal is 27.34147854349727 Hz after simple numerical calculation.
The discussion above gives the detail of the Iridium weak signal Doppler-shift estimation by the new QSA-IDE algorithm and shows that QSA-IDE algorithm can effectively estimate Doppler-shift in weak signal environment. In the collected 30 min IRIDIUM NEXT data, most Iridium signal powers are close to the power of the Iridium signal in
Figure 5a, even the power is lower for it. The Doppler-shift curves of the ring alert signal and primer message signal corresponding to the collected 30 min data obtained by QSA-IDE algorithm and the results of positioning using the Iridium satellite SOPs in weak signal environment are shown in the next section.
5.2. Positioning Based on Iridium Satellite SOPs in Weak Signal Environment
In this section, we realize the receiver positioning based on real collected IRIDIUM NEXT. The IRIDIUM NEXT signal Doppler-shift estimation results are given, then the positioning results based on IRIDIUM NEXT SOPs in weak signal environment is carried out.
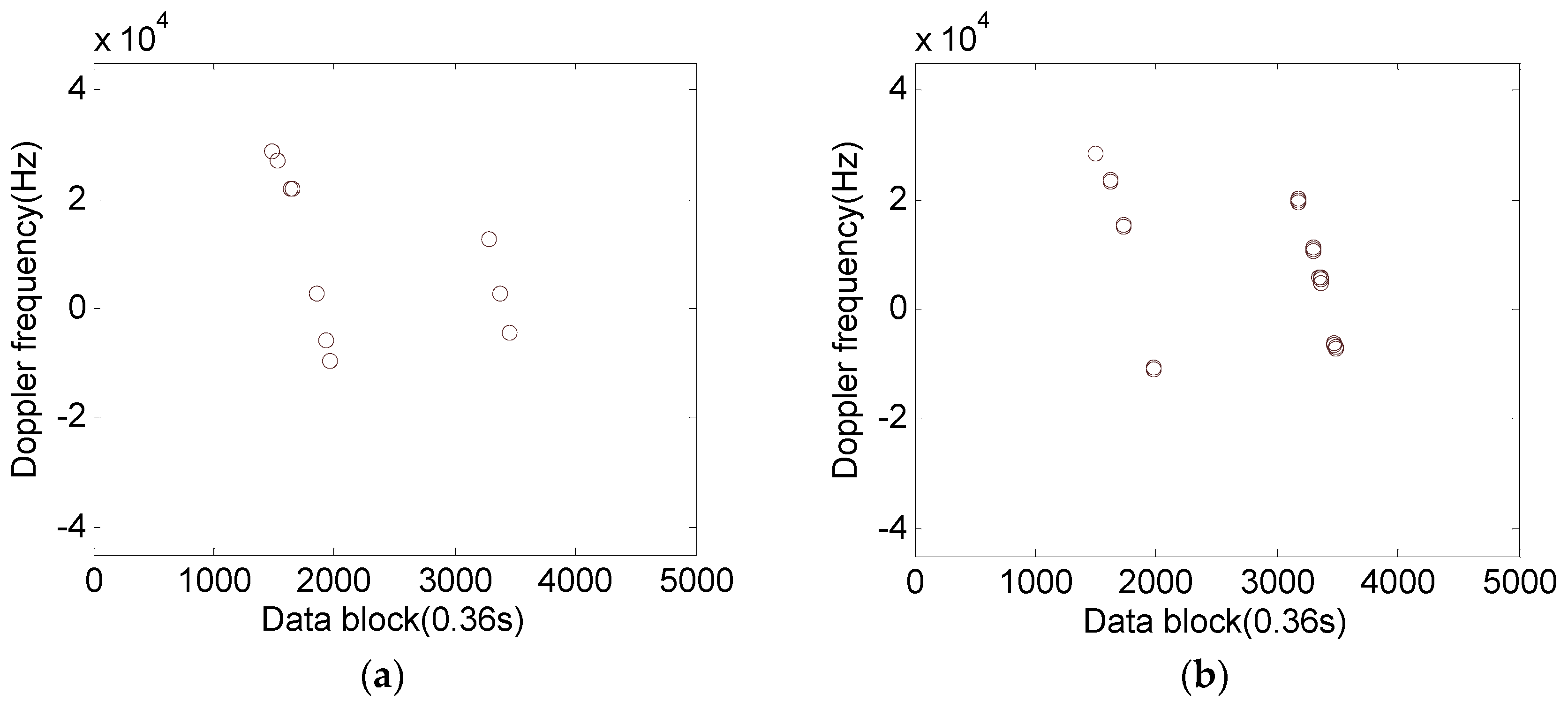
The entire collected IRDIUM NEXT data (30 min) are divided into 5000 continuous data blocks (the time length of every data block is 360 ms), and the Doppler-shift will be estimated if the data block contains the Iridium burst. The Doppler-shift estimation results obtained by the traditional method are shown in
Figure 8a,b. The Doppler-shift curves of the ring alert signal (downlink-only 7 channel) is shown in the left plot and the Doppler-shift curves of the primary message signal (downlink-only 11 channel) is shown in the right plot. The x-axis is the data block number and the y-axis is the Doppler-shift (the unit is Hz). Every circle in the plot denotes the Doppler estimation result from the corresponding data block. Generally, the Doppler-shift curve of the satellite is a kid of S-shape curve and the different S-shape curves belong to a different satellite, the Doppler value close to zero means the satellite is located near the top of the receiver, and the Doppler-shift value close to dozens of kHz means the elevation of the satellite is low. We can see that only two IRIDIUM NEXT satellite signal Doppler-shift estimation results can be obtained by the traditional method, which means in this case only two satellites can be seen by the receiver. In this case, when the two IRIDIUM NEXT satellites are near the top of the receiver, the Doppler-shift can be estimated by the traditional method since the signal is strong enough. However, the number of the Doppler-shift estimation results is very small, which means only several strong signals (average power is about 4 dB higher than for noise) can be used by the traditional method. Most signals are weak due to the occlusion environment and fail to estimate Doppler-shift by the traditional method.
In this case, when the static receiver position is calculated by multi-epoch positioning method, the geometric dilution of precision of the instantaneous Doppler positioning algorithm is very negative since the satellites are in the same orbit and few Doppler-shift measurements are obtained. As a result, receiver positioning cannot be achieved since the algorithm does not converge.
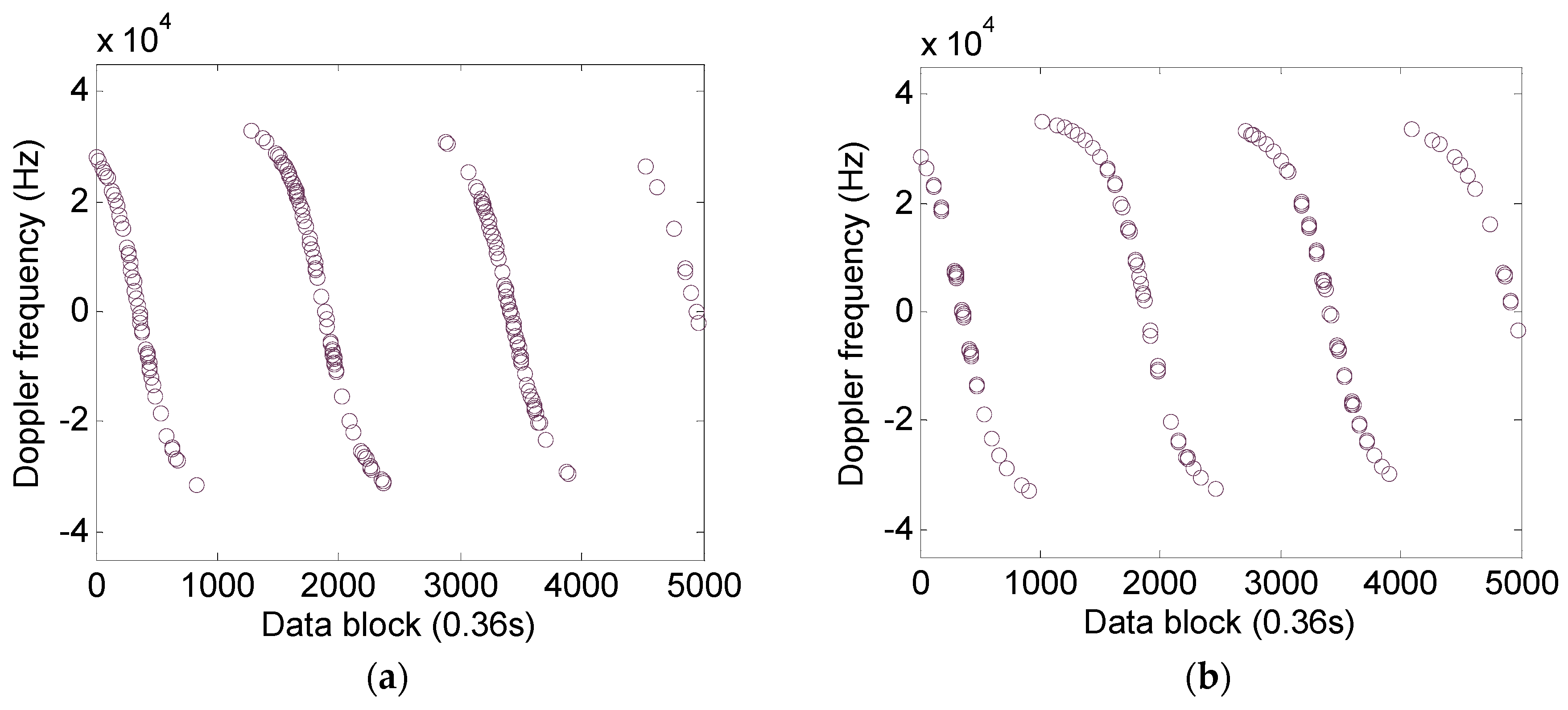
The QSA-IDE algorithm can estimate the IRIDIUM NEXT signal Doppler-shift in weak signal environment, as shown in
Figure 9a,b. The meaning of the x-axis and y-axis in
Figure 8 and
Figure 9 are the same. The Doppler-shift curves of the ring alert signal is shown in
Figure 9a and the Doppler-shift curves of the primary message signal is shown in
Figure 9b. We can see that four IRIDIUM NEXT satellites can be seen in this case, and both ring alert signal Doppler-shift curves and primary message signal Doppler-shift curves are more optimistic than for the traditional method. The Doppler curves in
Figure 9a,b have exactly the same profile since the signals corresponding to every pair of curves belong to the same satellites. The new QSA-IDE method not only can see more Iridium satellites but also significantly increases the visible times of every satellite. The low elevation satellite signal Doppler-shift is also estimated successfully. The first satellite just begins to be seen at low elevation. These four satellites are located at the same orbit since the Doppler-shift curves of all these four satellites have the same shape. Although only one satellite can be viewed simultaneously under the occlusion environment, the Doppler-shift measurements of these satellites are enough for static receiver positioning by the multi-epoch positioning method.
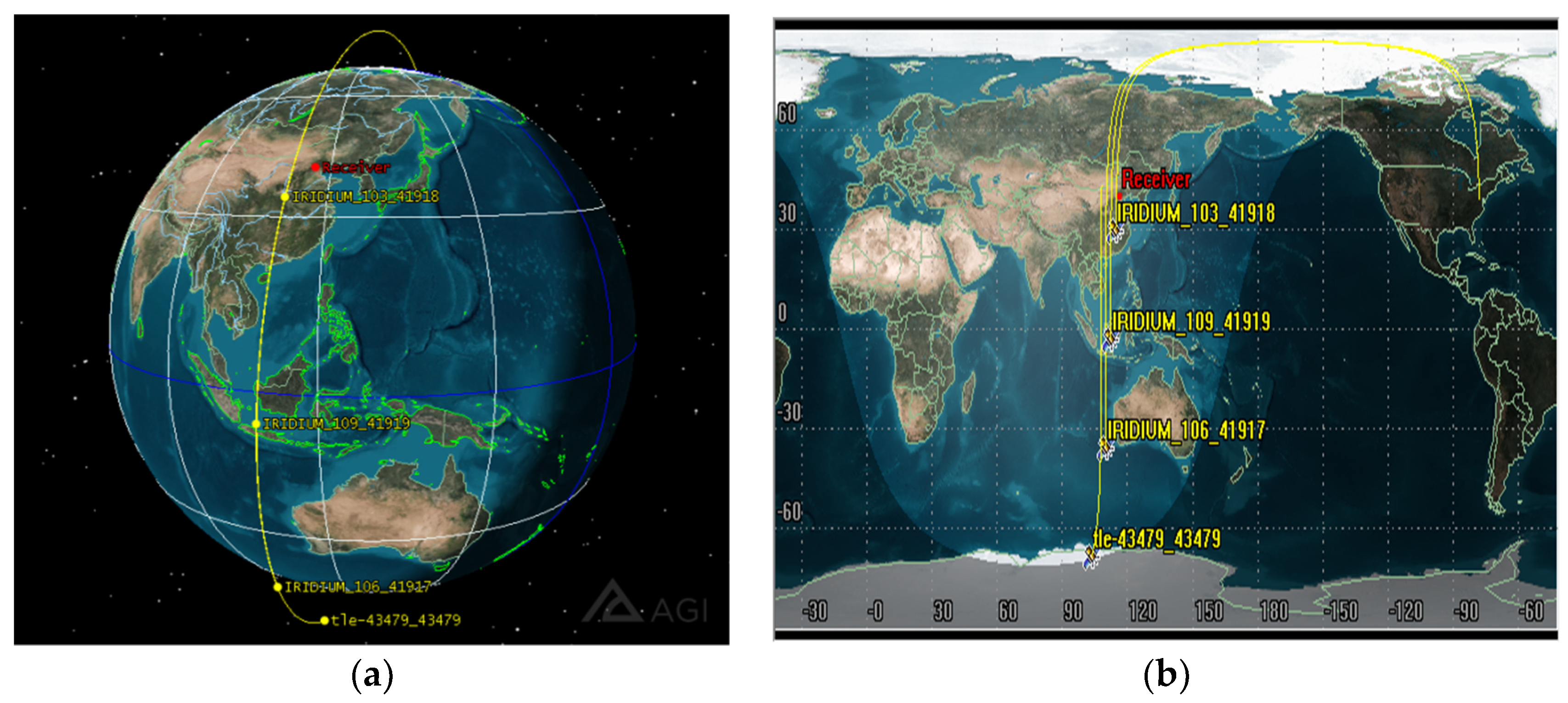
These four IRIDIUM NEXT satellites are simulated with the satellite tool kits (STK). The simulation time is in accordance with the time of the real IRIDIUM NEXT collected. The simulation results corresponding to the starting time of the real IRIDIUM NEXT collected are shown in
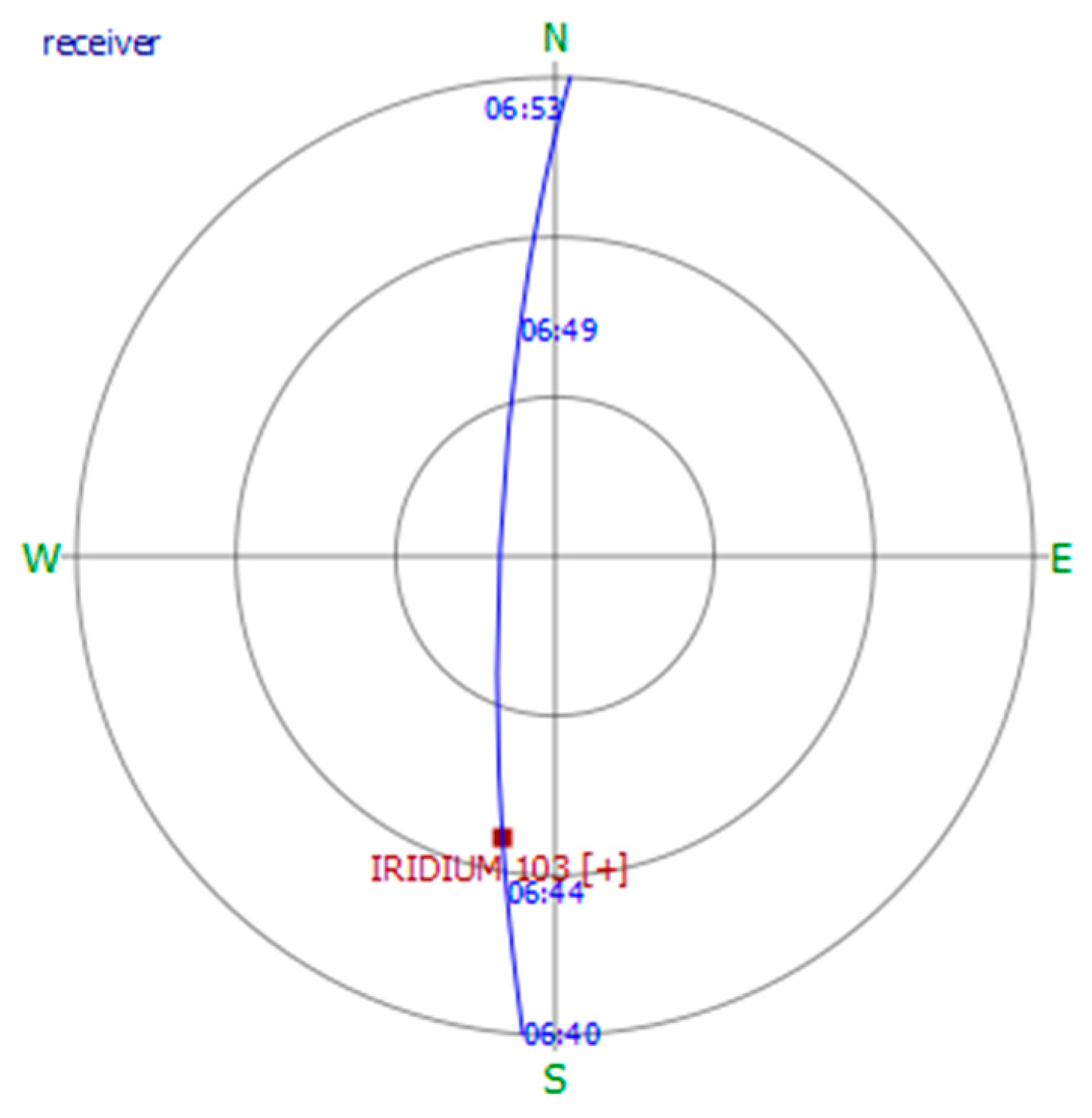
Figure 10a,b. The red point denotes the receiver location and the yellow point denotes the satellite locations. The satellites are IRIDIUM 41918U, IRIDIUM 41919U, IRIDIUM 41917U, and IRIDIUM 43479U. We can see that the first satellite, 41918U, just comes into view at a low elevation location, then following the other three Iridium satellites. These four satellites are located at the same orbit and the corresponding sub-tracks are near the receiver. The conclusion is in accordance with the analysis results from the real Doppler-shift curves discussed above. We give the sky plot by taking the first IRIDIUM NEXT satellite for example, as shown in
Figure 11. The red point denotes the Iridium satellite position corresponding to the starting time of the real Iridium data collected and the receiver locates at the central of the circle. In this case, although the receiver is located at an occlusion environment, we can still estimate the Iridium Doppler-shift.
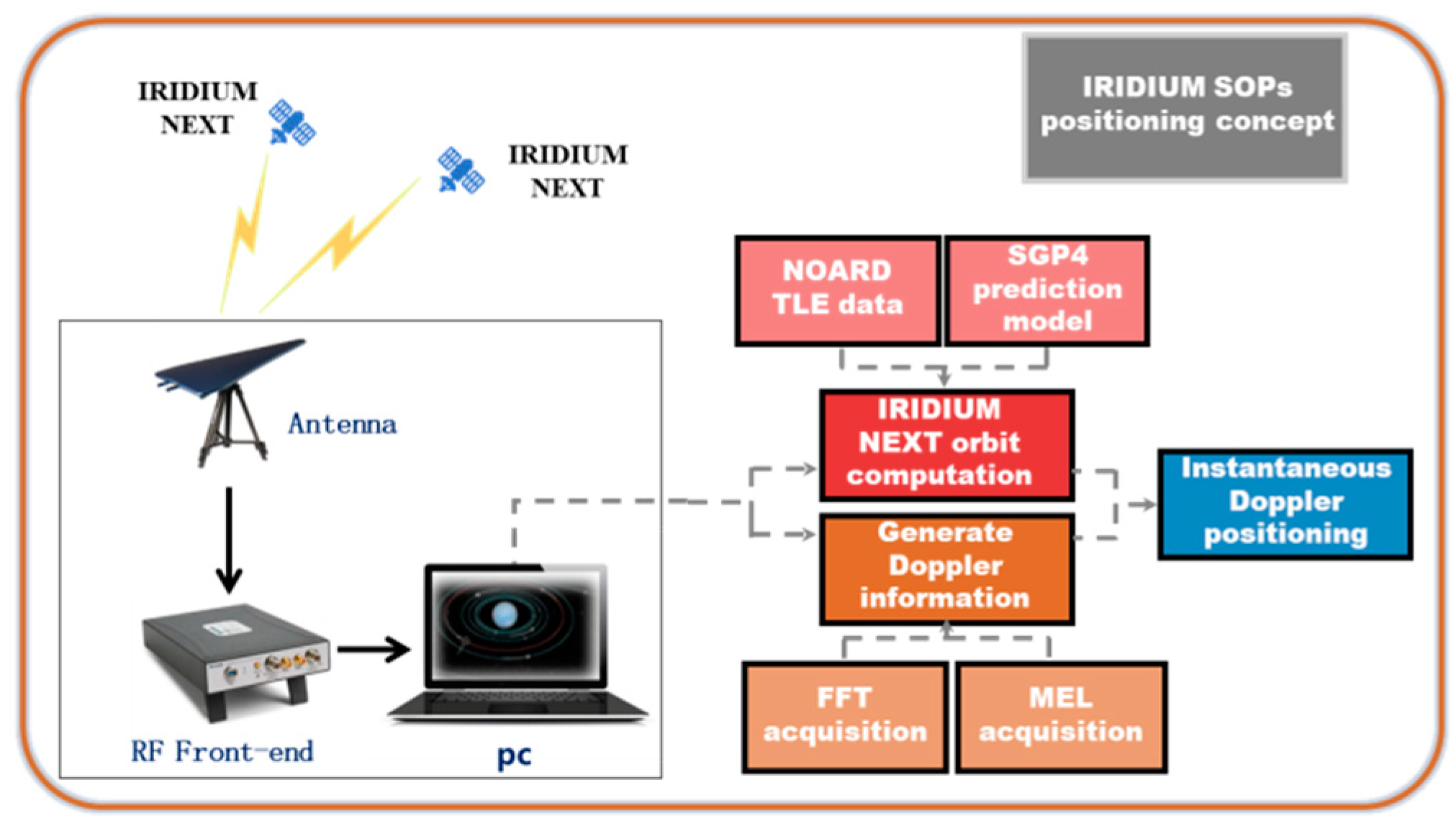
After obtaining the Doppler-shift measurements, we can realize the receiver positioning. The IRIDIUM NEXT TLE data downloaded from the NOARD web are obtained as the satellite ephemerides and the orbital prediction model is used to calculate the Iridium satellite position and velocity. The Doppler positioning and height aiding are used for receiver position calculation. For the static receiver, the multi-epoch positioning method is used here. We use total 25 Doppler-shift measurements to form the positioning solution equations and the least squares (LS) is used to calculate the receiver position. These 25 measurements come from four different satellites. As a result, for every satellite, the measurements corresponding to different moments are used together.
The receiver solutions calculated with different Doppler-shift measurement combinations are different. The Doppler-shift measurement accuracy corresponding to different satellites and different moments are different. Here, the positioning results with different Doppler measurement combinations are shown. Every combination has 25 Doppler measurements from four satellites, and the receiver position calculations are run for a total of 800 times. The positioning error statistic results with the ring alert signal are carried out first. The mean error and root mean square (RMS) are calculated, as shown in
Table 1.
It can be seen that compared with the north-direction and the up-direction, the receiver has a larger positioning error in the east-direction. The east-direction average position error reaches 147 m, and the error is with large fluctuations. The mean value of up-direction position error is optimistic, however, the fluctuation range is about 10 m more than the north-error. The 3D position error RMS in this case is about 400 m. The statistical results of height aiding are shown in
Table 2.
The positioning performance can be improved with height aiding, especially in the east-direction. The position error mean in the east-direction can be 21 m. However, the fluctuation range of position error in the east-direction is still larger than for north-direction. This is caused by the special IRIDIUM orbital characteristic. As a result, the 2D position error RMS in this case is 198 m. The positioning results presented above are based on the ring alert signal. Then, the receiver position can still be obtained after performing the same step for the primer message signal. The statistical positioning results of height aiding are shown in
Table 3.
The 2D position error RMS in this case is 163 m. It can be seen that the positioning error mean value of north-direction in
Table 3 is close to the corresponding error mean in
Table 2. However, the error mean value of north-direction in
Table 2 and
Table 3 is different. On the other hand, the positioning error RMS values calculated with the primer message signal are more optimistic than for the ring alert signal. This is because the power of the ring alert signal is generally stronger than for the primer message signal. As a result, the Doppler-shift measurement accuracy of the primer message signal is better than for the ring alert signal, and the fluctuation of positioning error is smaller.
Considering the Doppler-shift measurement accuracy for different satellites and different moments is different, the Kalman filtering (KF) is used to process the least squares (LS) solutions from different Doppler measurement combinations. As a result, the position estimations calculated with the two channel signals are both about 110 m away from the real location. The positioning errors in east-west direction are more optimistic than for south-north direction in two cases. The common features of positioning error are caused by the satellite orbital error.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}