Neural Network Control Design for an Unmanned Aerial Vehicle with a Suspended Payload


Abstract
1. Introduction
- A 3D dynamic model of a quadrotor transportation system is built.
- The multiple time-varying uncertainties and disturbances are compensated with a novel RBFNN-based backstepping sliding mode control design approach. The stability of the proposed methodology is attested to via analysis of the Lyapunov function.
- The proposed system is tested in a real flight scenario, which validates the robustness of the proposed UAV transportation platform.
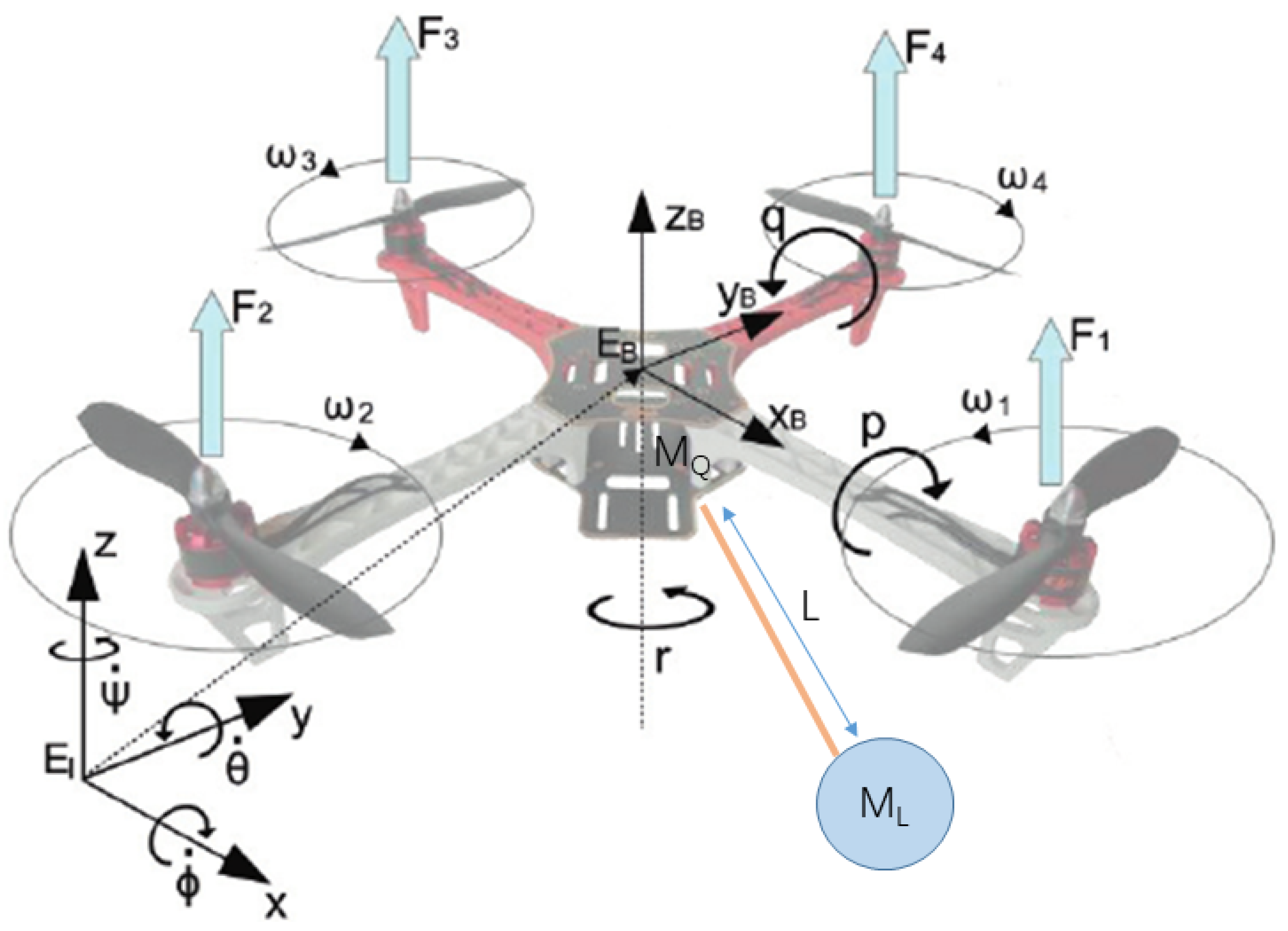
2. Quadrotor Model and Suspended Payload Architecture
3. Neural Network-Based Backstepping Control
4. Simulations and Experimental Tests
4.1. Simulation Setup and Results
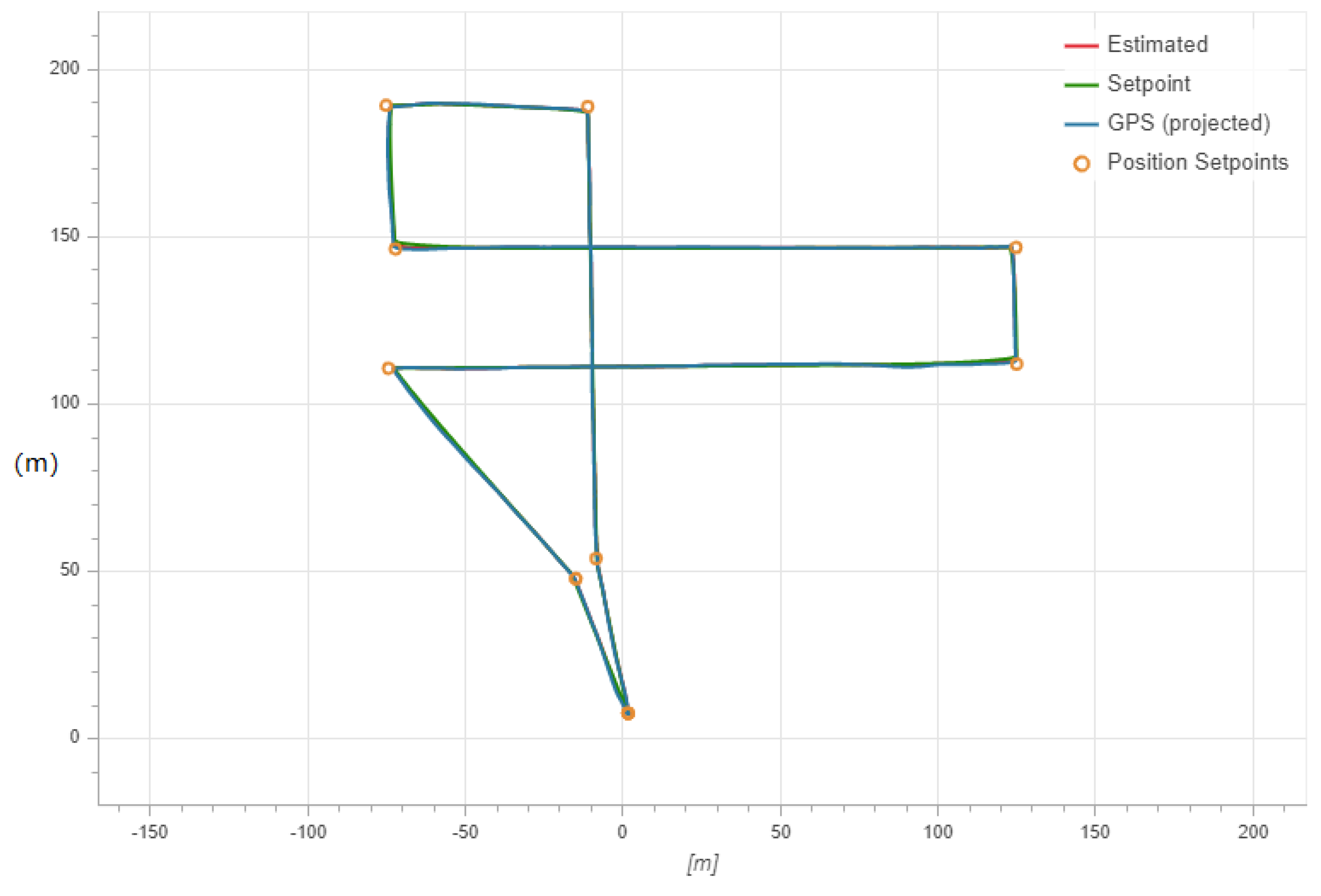
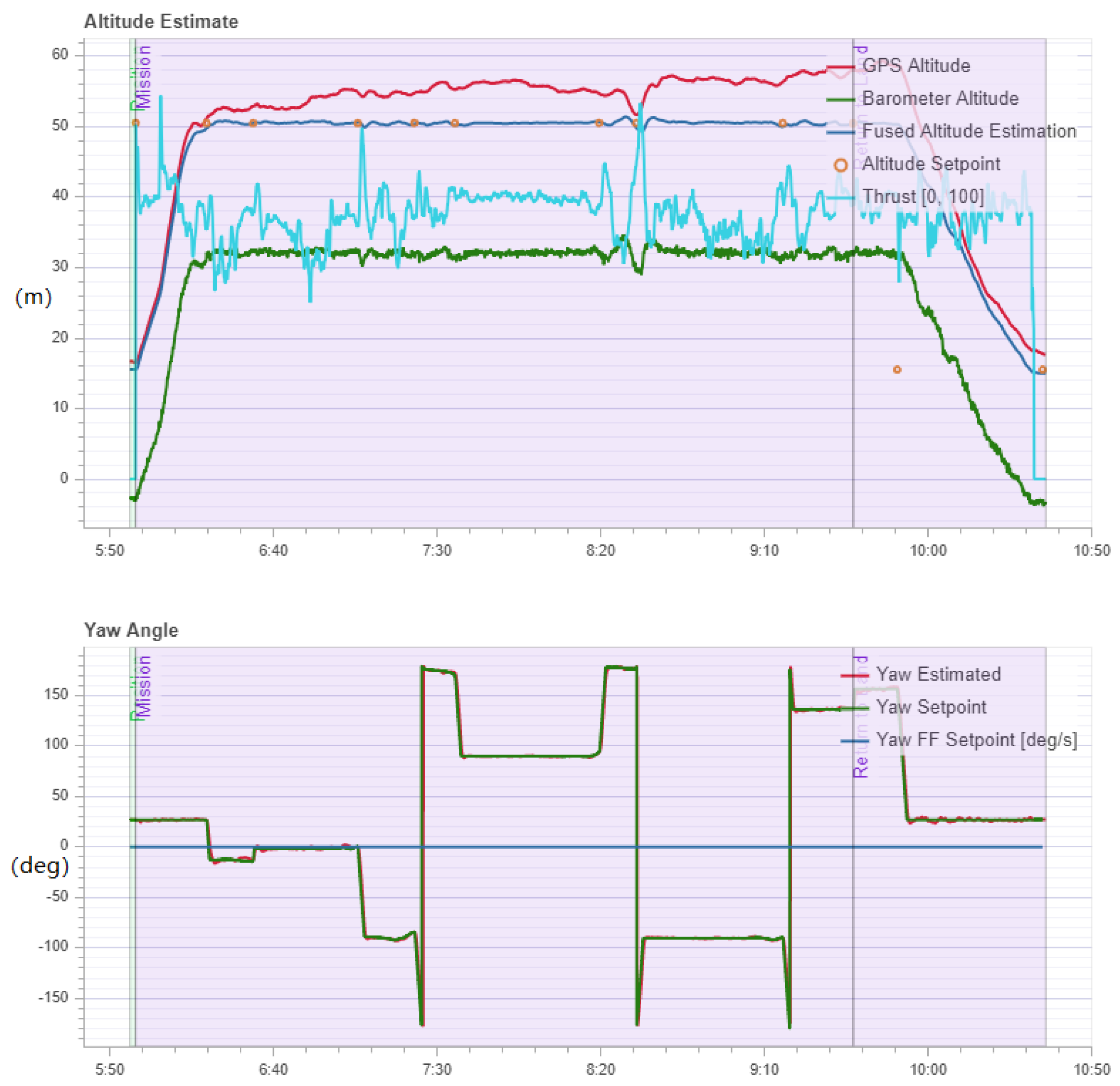
4.2. Field Tests and Results
- Hovering with external disturbance: https://youtu.be/MZfE9BsYLqY.
- Path following with wind disturbance: https://youtu.be/ENtDYhLWR5Y.
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Liang, X.; Fang, Y.; Sun, N.; Lin, H. Nonlinear hierarchical control for unmanned quadrotor transportation systems. IEEE Trans. Ind. Electron. 2017, 65, 3395–3405. [Google Scholar] [CrossRef]
- Palunko, I.; Cruz, P.; Fierro, R. Agile load transportation: Safe and efficient load manipulation with aerial robots. IEEE Robot. Autom. Mag. 2012, 19, 69–79. [Google Scholar] [CrossRef]
- Valente, J.; Sanz, D.; Barrientos, A.; Cerro, J.D.; Ribeiro, Á.; Rossi, C. An air-ground wireless sensor network for crop monitoring. Sensors 2011, 11, 6088–6108. [Google Scholar] [CrossRef]
- Li, B.; Zhou, W.; Sun, J.; Wen, C.Y.; Chen, C.K. Development of model predictive controller for a Tail-Sitter VTOL UAV in hover flight. Sensors 2018, 18, 2859. [Google Scholar] [CrossRef] [PubMed]
- Luque-Vega, L.F.; Castillo-Toledo, B.; Loukianov, A.; Gonzalez-Jimenez, L.E. Power line inspection via an unmanned aerial system based on the quadrotor helicopter. In Proceedings of the MELECON 2014—2014 17th IEEE Mediterranean Electrotechnical Conference, Beirut, Lebanon, 13–16 April 2014; pp. 393–397. [Google Scholar]
- Pastor, E.; Lopez, J.; Royo, P. UAV payload and mission control hardware/software architecture. IEEE Aerosp. Electron. Syst. Mag. 2007, 22, 3–8. [Google Scholar] [CrossRef]
- Goodarzi, F.A.; Lee, D.; Lee, T. Geometric control of a quadrotor UAV transporting a payload connected via flexible cable. Int. J. Control Autom. Syst. 2015, 13, 1486–1498. [Google Scholar] [CrossRef]
- Liang, X.; Fang, Y.; Sun, N.; Lin, H. Dynamics analysis and time-optimal motion planning for unmanned quadrotor transportation systems. Mechatronics 2018, 50, 16–29. [Google Scholar] [CrossRef]
- Richter, C.; Bry, A.; Roy, N. Polynomial trajectory planning for aggressive quadrotor flight in dense indoor environments. In Robotics Research; Springer: Berlin, Germany, 2016; pp. 649–666. [Google Scholar]
- Allen, R.; Pavone, M. A real-time framework for kinodynamic planning with application to quadrotor obstacle avoidance. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, San Diego, CA, USA, 4–8 January 2016; p. 1374. [Google Scholar]
- Polvara, R.; Patacchiola, M.; Sharma, S.; Wan, J.; Manning, A.; Sutton, R.; Cangelosi, A. Autonomous quadrotor landing using deep reinforcement learning. arXiv 2017, arXiv:1709.03339. [Google Scholar]
- Estevez, J.; Lopez-Guede, J.M.; Graña, M. Particle swarm optimization quadrotor control for cooperative aerial transportation of deformable linear objects. Cybern. Syst. 2016, 47, 4–16. [Google Scholar] [CrossRef]
- Faust, A.; Palunko, I.; Cruz, P.; Fierro, R.; Tapia, L. Automated aerial suspended cargo delivery through reinforcement learning. Artif. Intell. 2017, 247, 381–398. [Google Scholar] [CrossRef]
- Klausen, K.; Fossen, T.I.; Johansen, T.A. Nonlinear control of a multirotor UAV with suspended load. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 176–184. [Google Scholar]
- Sreenath, K.; Michael, N.; Kumar, V. Trajectory generation and control of a quadrotor with a cable-suspended load-a differentially-flat hybrid system. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 4888–4895. [Google Scholar]
- Masone, C.; Bülthoff, H.H.; Stegagno, P. Cooperative transportation of a payload using quadrotors: A reconfigurable cable-driven parallel robot. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 1623–1630. [Google Scholar]
- Estevez, J.; Lopez-Guede, J.M.; Grana, M. Quasi-stationary state transportation of a hose with quadrotors. Robot. Auton. Syst. 2015, 63, 187–194. [Google Scholar] [CrossRef]
- Foehn, P.; Falanga, D.; Kuppuswamy, N.; Tedrake, R.; Scaramuzza, D. Fast Trajectory Optimization for Agile Quadrotor Maneuvers with a Cable-Suspended Payload. In Proceedings of the Robotics: Science and Systems, Cambridge, MA, USA, 12–16 July 2017; pp. 1–10. [Google Scholar]
- Gassner, M.; Cieslewski, T.; Scaramuzza, D. Dynamic collaboration without communication: Vision-based cable-suspended load transport with two quadrotors. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 5196–5202. [Google Scholar]
- Seyedtabaii, S. A Modified FOPID Versus H∞ and μ Synthesis Controllers: Robustness Study. Int. J. Control Autom. Syst. 2019, 17, 639–646. [Google Scholar] [CrossRef]
- Qian, L.; Liu, H.H. Path Following Control of A Quadrotor UAV with A Cable Suspended Payload Under Wind Disturbances. IEEE Trans. Ind. Electron. 2019. [Google Scholar] [CrossRef]
- Alexis, K.; Nikolakopoulos, G.; Tzes, A. Switching model predictive attitude control for a quadrotor helicopter subject to atmospheric disturbances. Control Eng. Pract. 2011, 19, 1195–1207. [Google Scholar] [CrossRef]
- Wang, L.; Su, J. Robust disturbance rejection control for attitude tracking of an aircraft. IEEE Trans. Control Syst. Technol. 2015, 23, 2361–2368. [Google Scholar] [CrossRef]
- Michailidis, M.G.; Kanistras, K.; Agha, M.; Rutherford, M.J.; Valavanis, K.P. Nonlinear Control of Fixed-Wing UAVs with Time-Varying Aerodynamic Uncertainties Via μ-Synthesis. In Proceedings of the 2018 IEEE Conference on Decision and Control (CDC), Miami Beach, FL, USA, 17–19 December 2018; pp. 6314–6321. [Google Scholar]
- Mystkowski, A. Implementation and investigation of a robust control algorithm for an unmanned micro-aerial vehicle. Robot. Auton. Syst. 2014, 62, 1187–1196. [Google Scholar] [CrossRef]
- Benallegue, A.; Mokhtari, A.; Fridman, L. High-order sliding-mode observer for a quadrotor UAV. Int. J. Robust Nonlinear Control IFAC Affil. J. 2008, 18, 427–440. [Google Scholar] [CrossRef]
- Ordaz, J.; Salazar, S.; Mondié, S.; Romero, H.; Lozano, R. Predictor-based position control of a quad-rotor with delays in GPS and vision measurements. J. Intell. Robot. Syst. 2013, 70, 13–26. [Google Scholar] [CrossRef]
- Wang, Q.; Wang, J.W.; Yu, Y.; Sun, C.Y. Robust attitude control of an indoor micro quadrotor with input delay. In Proceedings of the 2014 IEEE Chinese Guidance, Navigation and Control Conference, Yantai, China, 8–10 August 2014; pp. 2363–2368. [Google Scholar]
- Luo, C.; Yu, L.; Ren, P. A vision-aided approach to perching a bioinspired unmanned aerial vehicle. IEEE Trans. Ind. Electron. 2017, 65, 3976–3984. [Google Scholar] [CrossRef]
- Bouabdallah, S.; Siegwart, R. Full control of a quadrotor. In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 153–158. [Google Scholar]
- Hwangbo, J.; Sa, I.; Siegwart, R.; Hutter, M. Control of a quadrotor with reinforcement learning. IEEE Robot. Autom. Lett. 2017, 2, 2096–2103. [Google Scholar] [CrossRef]
- Pedrycz, W. Conditional fuzzy clustering in the design of radial basis function neural networks. IEEE Trans. Neural Netw. 1998, 9, 601–612. [Google Scholar] [CrossRef] [PubMed]
- Ghosh-Dastidar, S.; Adeli, H.; Dadmehr, N. Principal component analysis-enhanced cosine radial basis function neural network for robust epilepsy and seizure detection. IEEE Trans. Biomed. Eng. 2008, 55, 512–518. [Google Scholar] [CrossRef] [PubMed]
- Mohd Basri, M.A.; Husain, A.R.; Danapalasingam, K.A. Intelligent adaptive backstepping control for MIMO uncertain non-linear quadrotor helicopter systems. Trans. Inst. Meas. Control 2015, 37, 345–361. [Google Scholar] [CrossRef]
- Zou, Y.; Zheng, Z. A robust adaptive RBFNN augmenting backstepping control approach for a model-scaled helicopter. IEEE Trans. Control Syst. Technol. 2015, 23, 2344–2352. [Google Scholar] [CrossRef]
- Voos, H. Nonlinear control of a quadrotor micro-UAV using feedback-linearization. In Proceedings of the 2009 IEEE International Conference on Mechatronics, Malaga, Spain, 14–17 April 2009; pp. 1–6. [Google Scholar]
- Cichella, V.; Kaminer, I.; Xargay, E.; Dobrokhodov, V.; Hovakimyan, N.; Aguiar, A.P.; Pascoal, A.M. A Lyapunov-based approach for time-coordinated 3D path-following of multiple quadrotors. In Proceedings of the 2012 IEEE 51st IEEE Conference on Decision and Control (CDC), Maui, HI, USA, 10–13 December 2012; pp. 1776–1781. [Google Scholar]
- Chen, F.; Jiang, R.; Zhang, K.; Jiang, B.; Tao, G. Robust backstepping sliding-mode control and observer-based fault estimation for a quadrotor UAV. IEEE Trans. Ind. Electron. 2016, 63, 5044–5056. [Google Scholar] [CrossRef]
- Powers, C.; Mellinger, D.; Kumar, V. Quadrotor kinematics and dynamics. In Handbook of Unmanned Aerial Vehicles; Springer: Berlin, Germany, 2015; pp. 307–328. [Google Scholar]
- Faessler, M.; Fontana, F.; Forster, C.; Mueggler, E.; Pizzoli, M.; Scaramuzza, D. Autonomous, vision-based flight and live dense 3D mapping with a quadrotor micro aerial vehicle. J. Field Robot. 2016, 33, 431–450. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | ||||||
|---|---|---|---|---|---|---|
| State | z | y | x |
| Parameter | Value |
|---|---|
| Mass (kg) | 0.23 |
| Arm length (m) | 0.45 |
| k | 0.0000326 |
| b | 0.000021 |
| J | diag (0.0001612, 0.0001288, 0.0002225) |
| Attitude Channel | k | h | ||
|---|---|---|---|---|
| Roll | 10 | 0.5 | 15 | 1 |
| Pitch | 15 | 0.5 | 25 | 4 |
| Yaw | 12 | 0.5 | 20 | 1 |
| RMSE Horizontal X,Y (m) | 0.021 |
| RMSE Vertical Z (m) | 0.082 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, C.; Du, Z.; Yu, L. Neural Network Control Design for an Unmanned Aerial Vehicle with a Suspended Payload. Electronics 2019, 8, 931. https://doi.org/10.3390/electronics8090931
Luo C, Du Z, Yu L. Neural Network Control Design for an Unmanned Aerial Vehicle with a Suspended Payload. Electronics. 2019; 8(9):931. https://doi.org/10.3390/electronics8090931
Chicago/Turabian StyleLuo, Cai, Zhenpeng Du, and Leijian Yu. 2019. "Neural Network Control Design for an Unmanned Aerial Vehicle with a Suspended Payload" Electronics 8, no. 9: 931. https://doi.org/10.3390/electronics8090931
APA StyleLuo, C., Du, Z., & Yu, L. (2019). Neural Network Control Design for an Unmanned Aerial Vehicle with a Suspended Payload. Electronics, 8(9), 931. https://doi.org/10.3390/electronics8090931