Method for Determining Starting Point of Rolling Bearing Life Prediction Based on Linear Regression


Abstract
1. Introduction
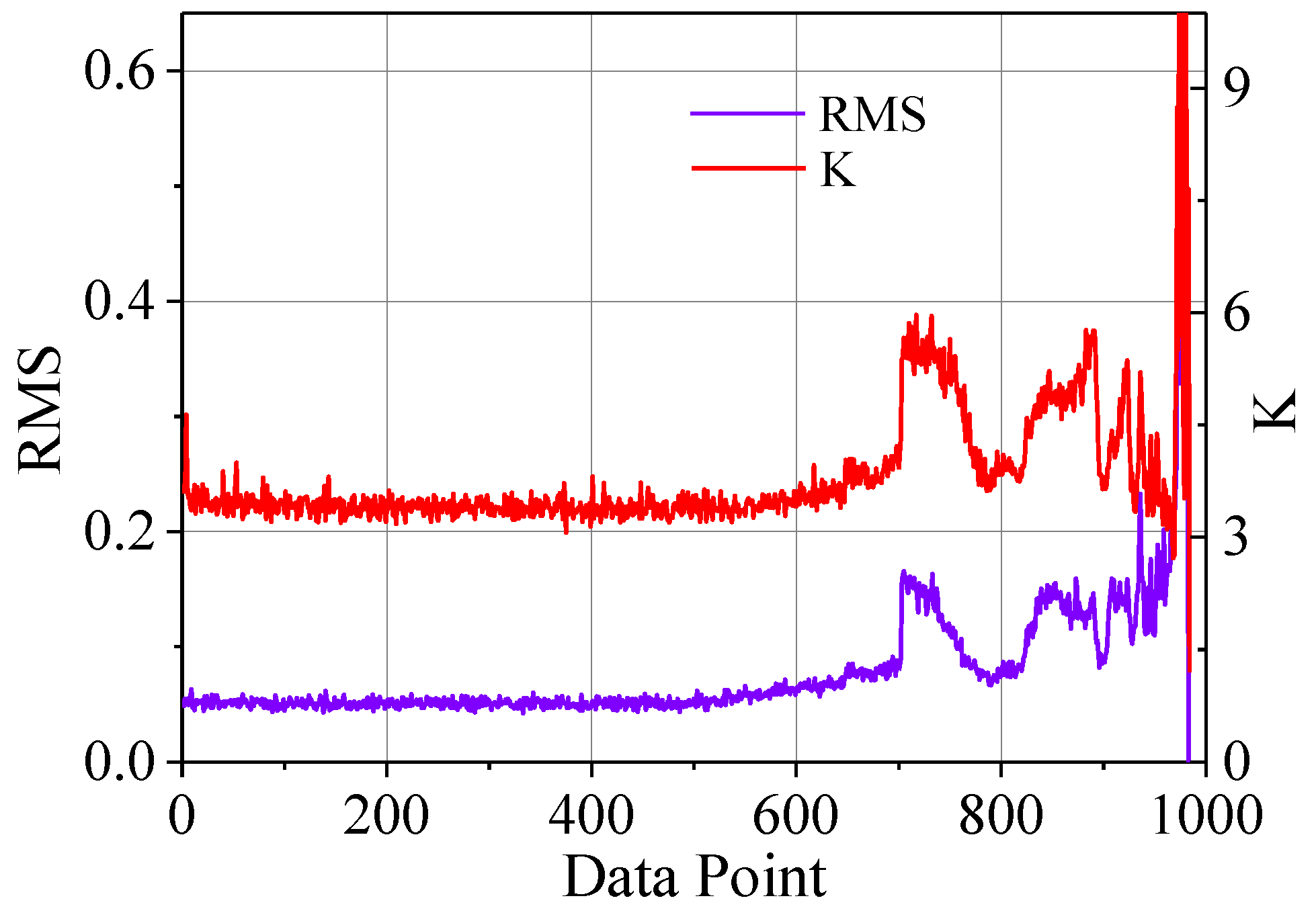
2. Selection of the Degradation Features
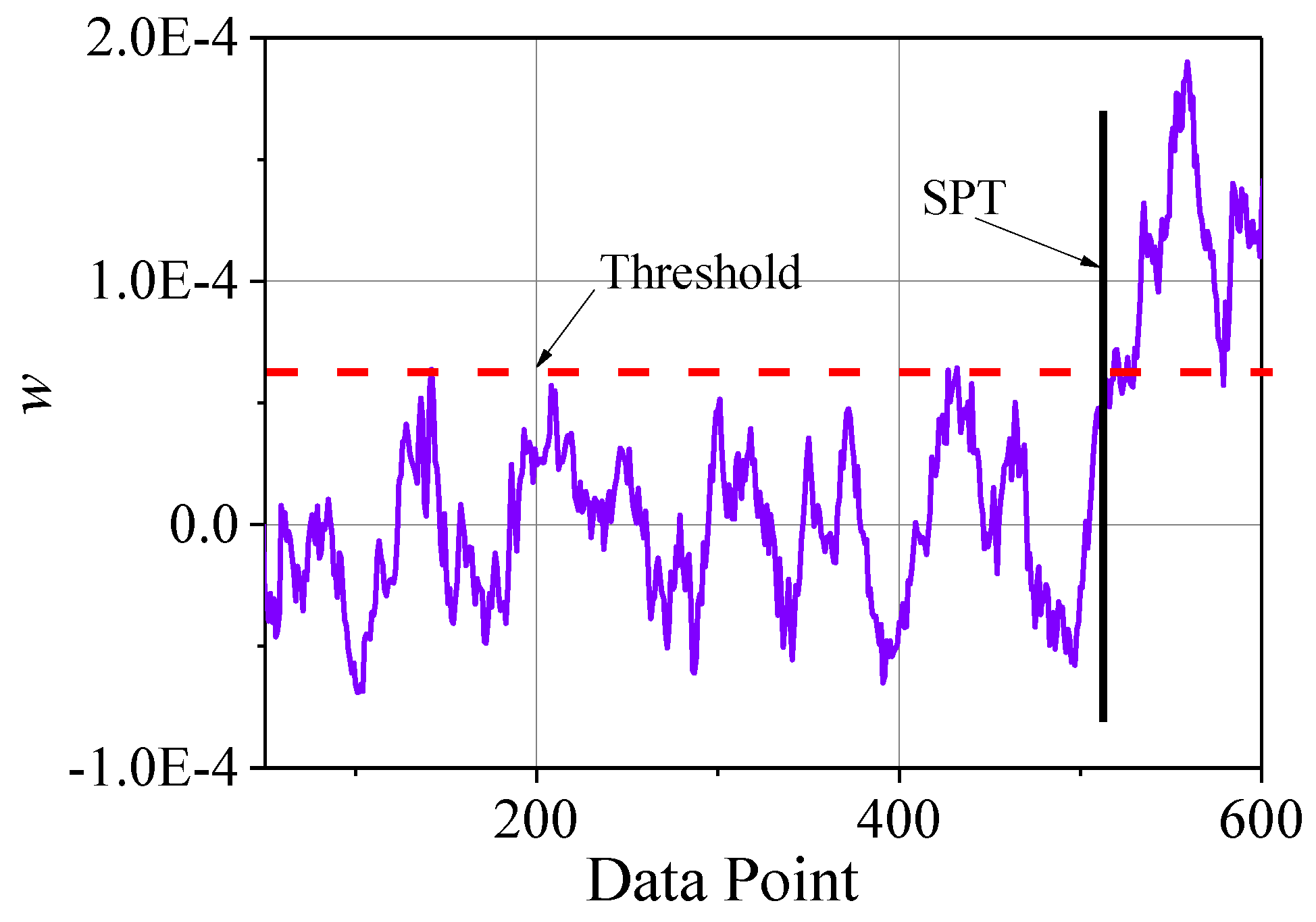
3. Determination of the Starting Prediction Time (SPT) Point
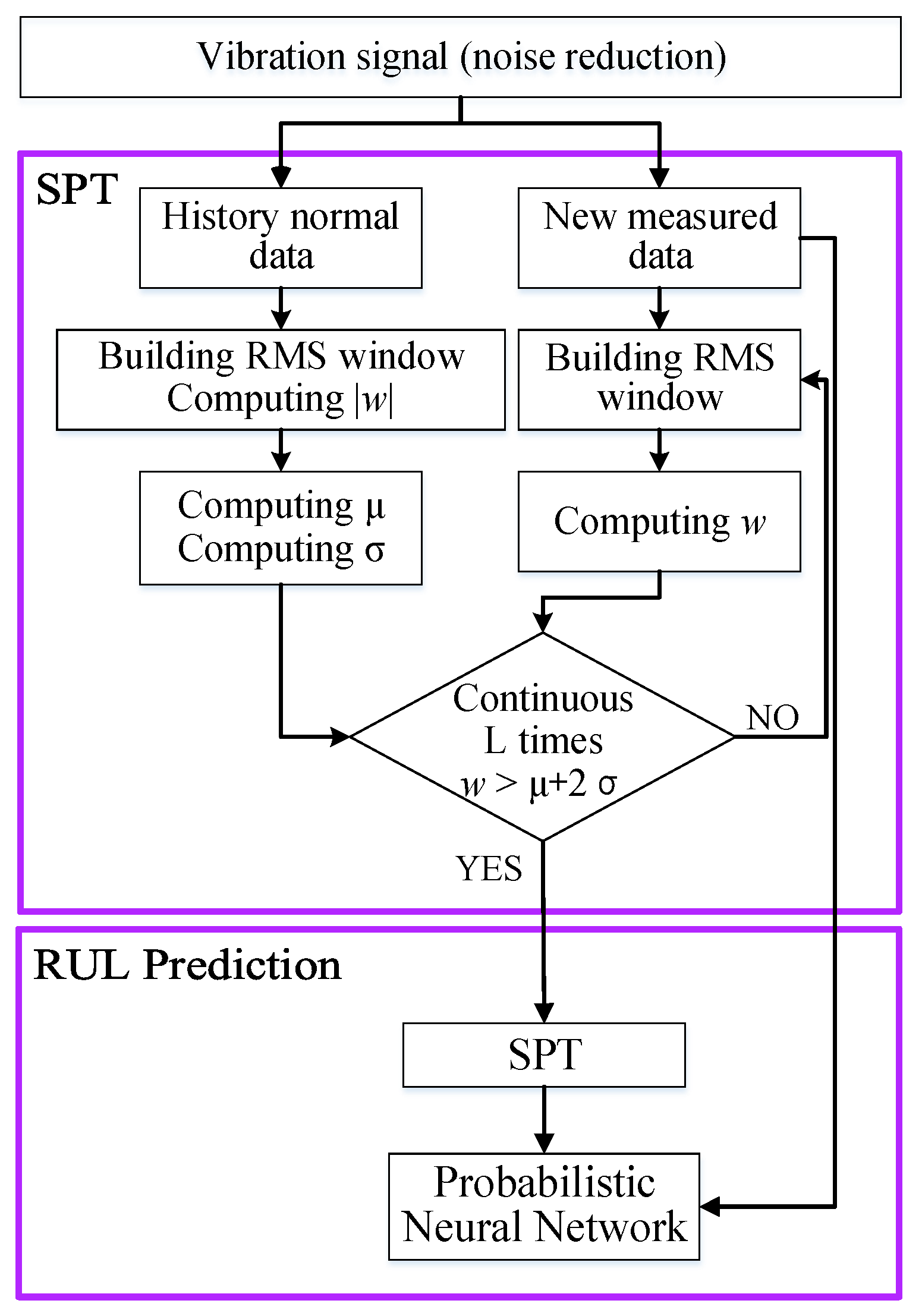
3.1. Mathematical Model of the Proposed Method
3.2. Prediction Process of RUL
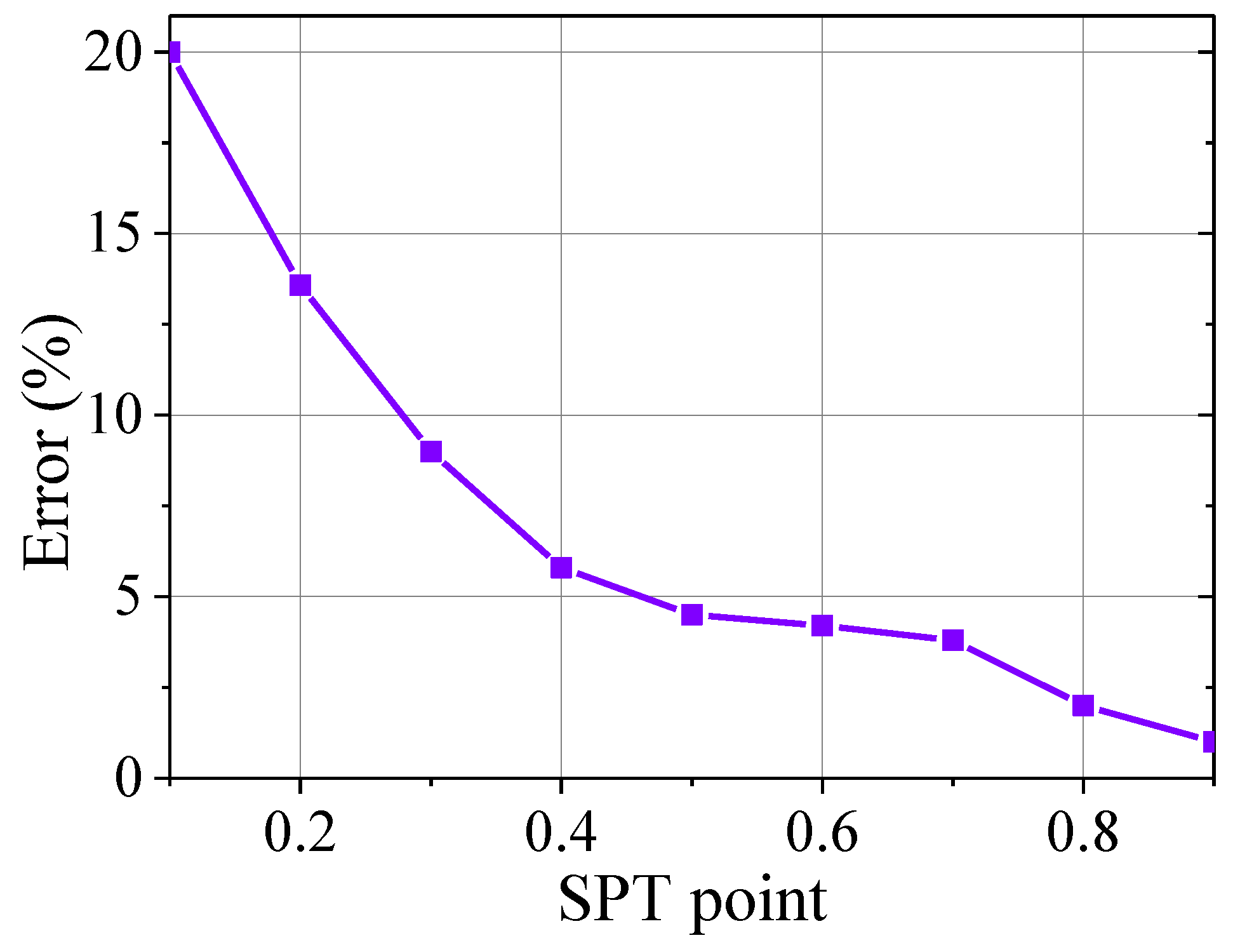
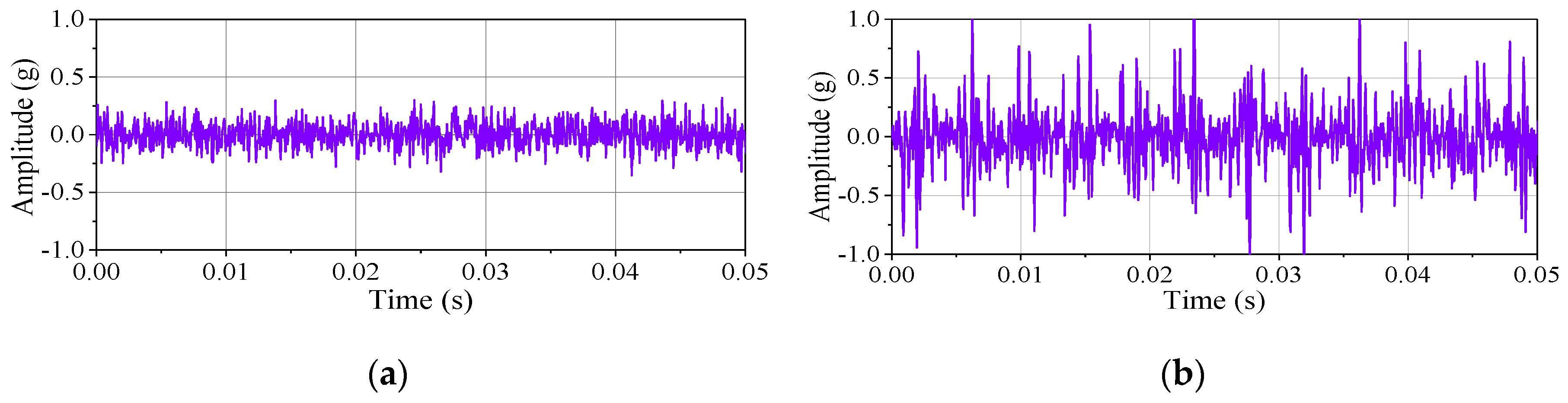
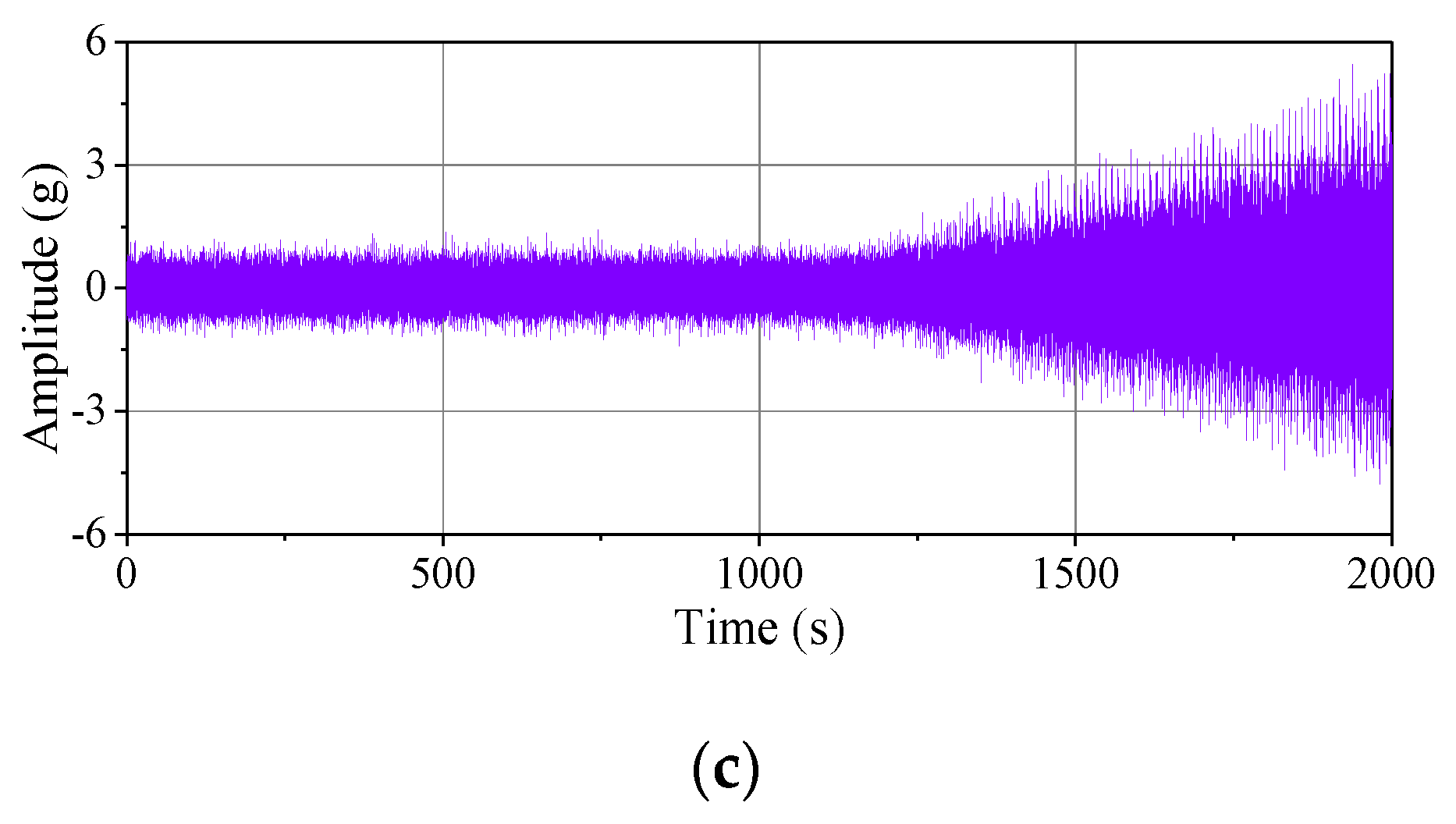
4. Simulation Analysis
5. Experimental Validation
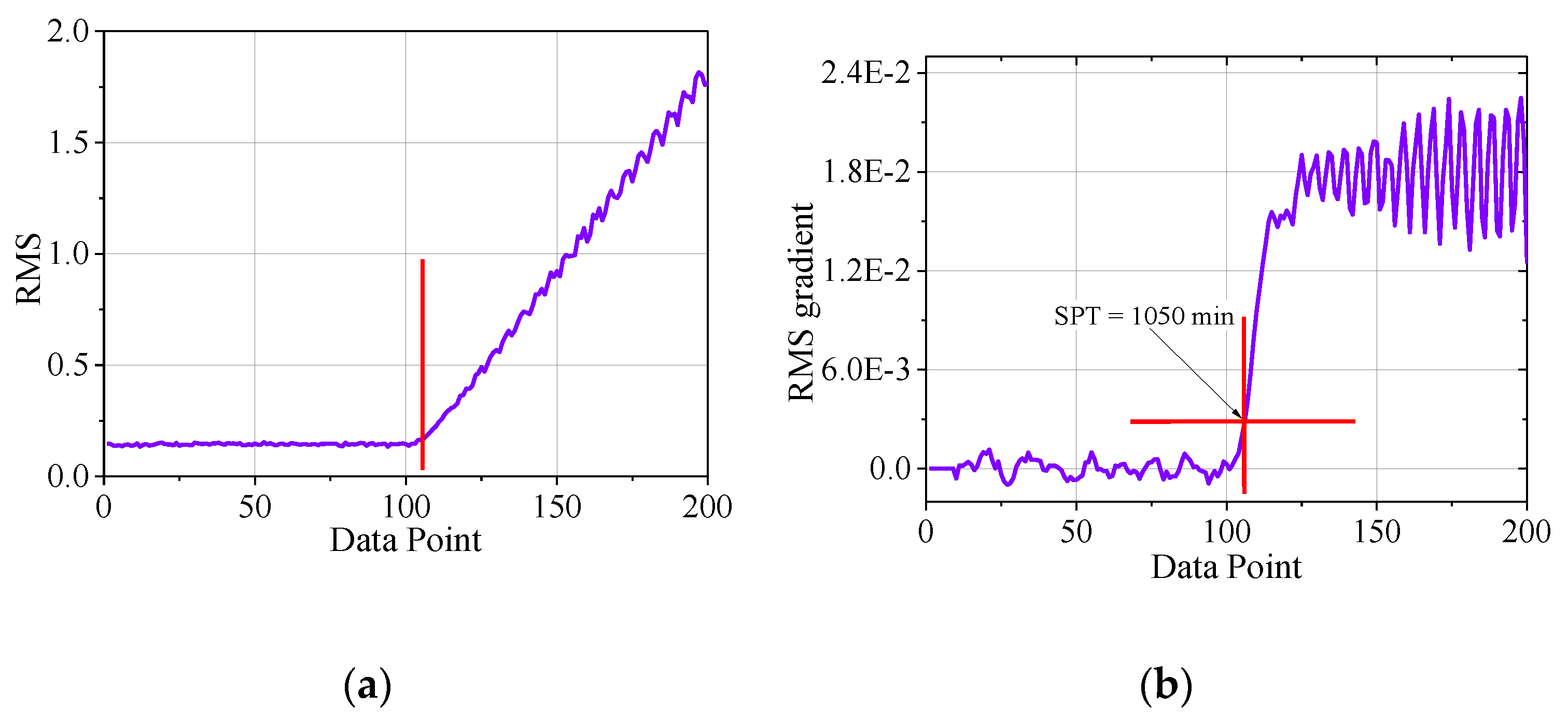
5.1. Experimental Data
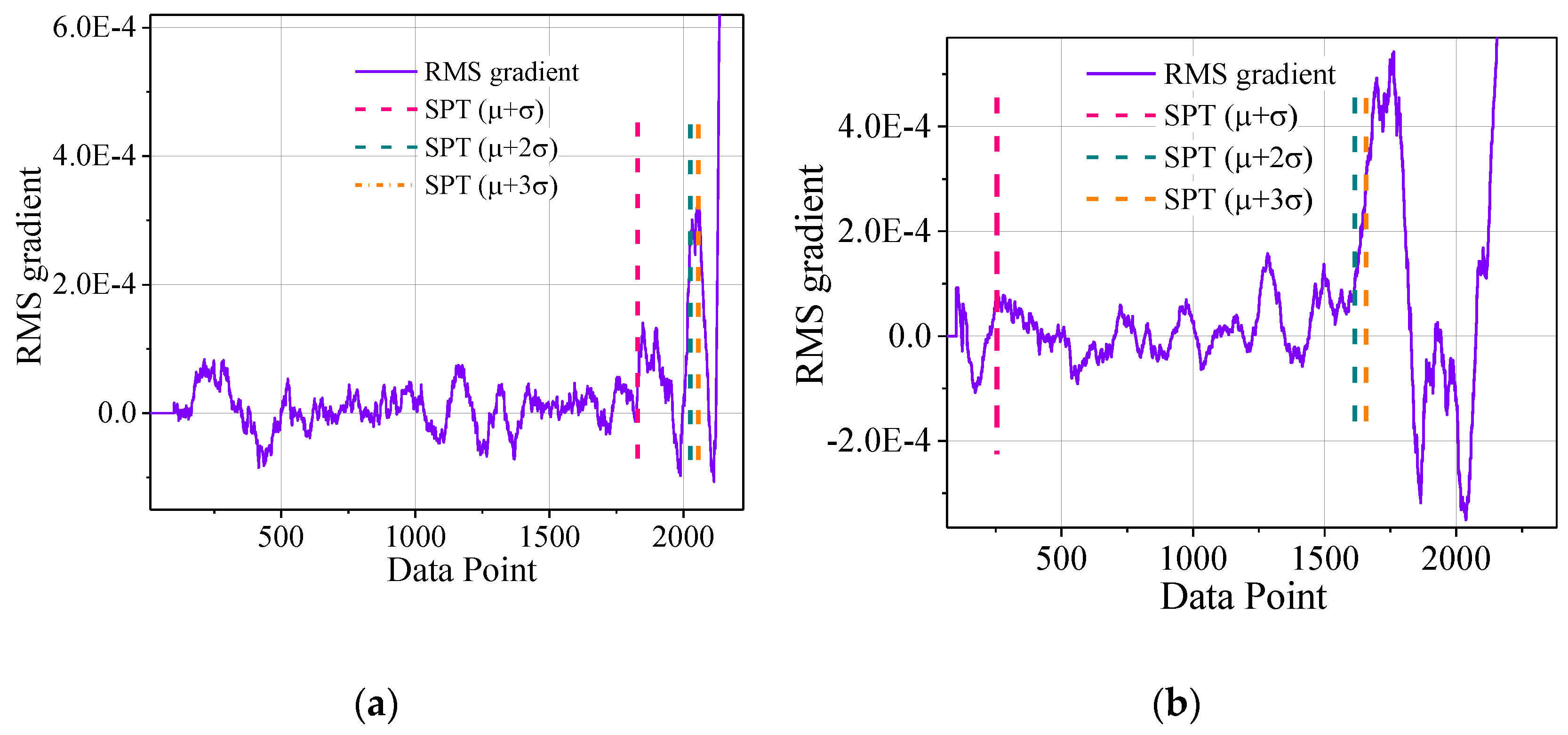
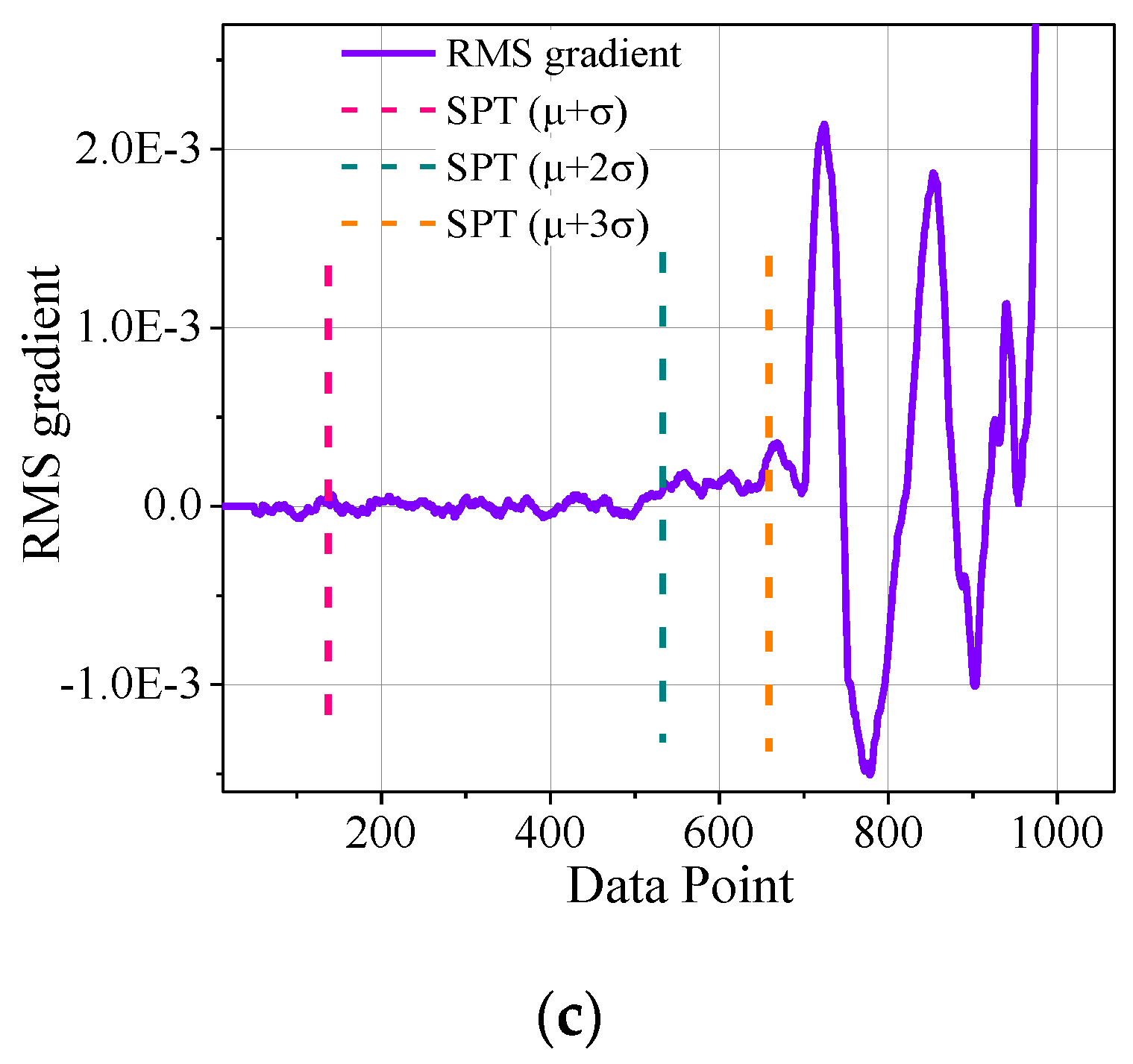
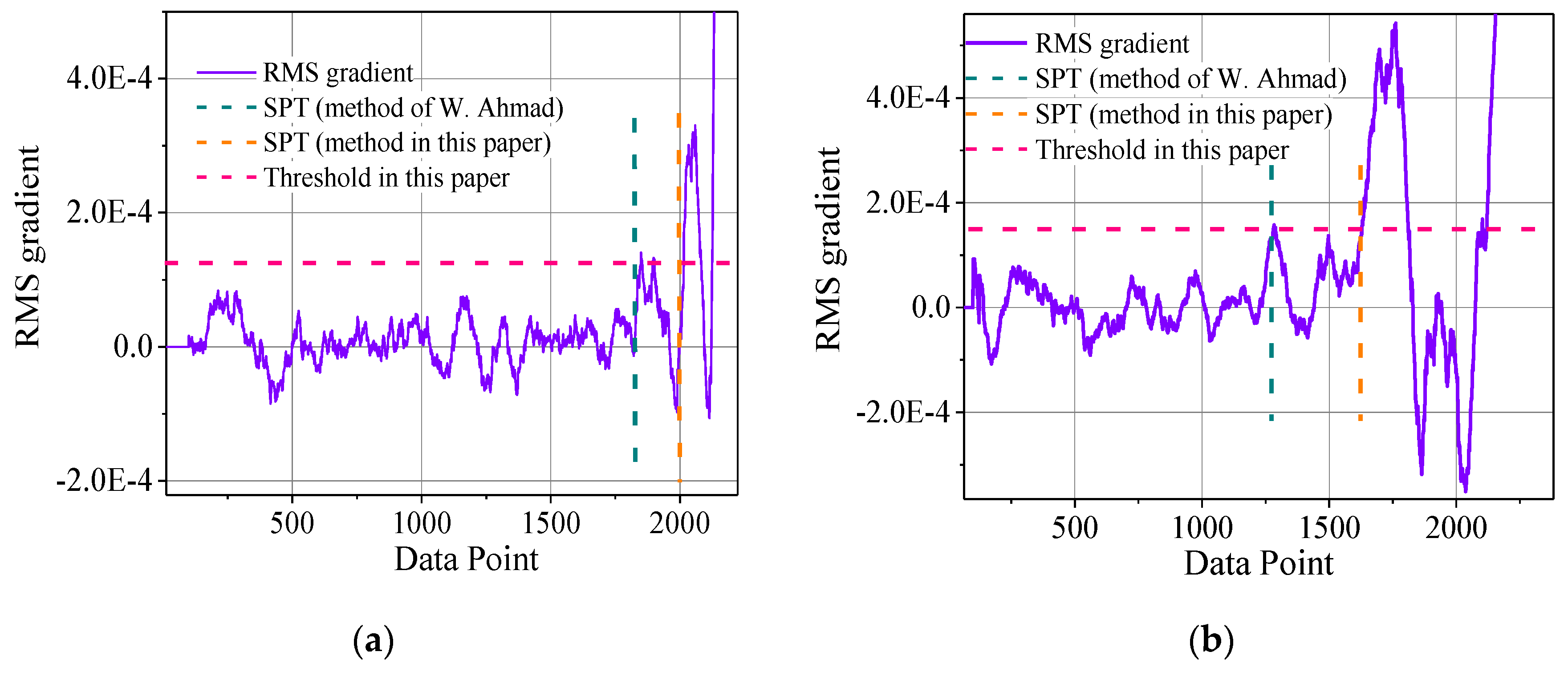
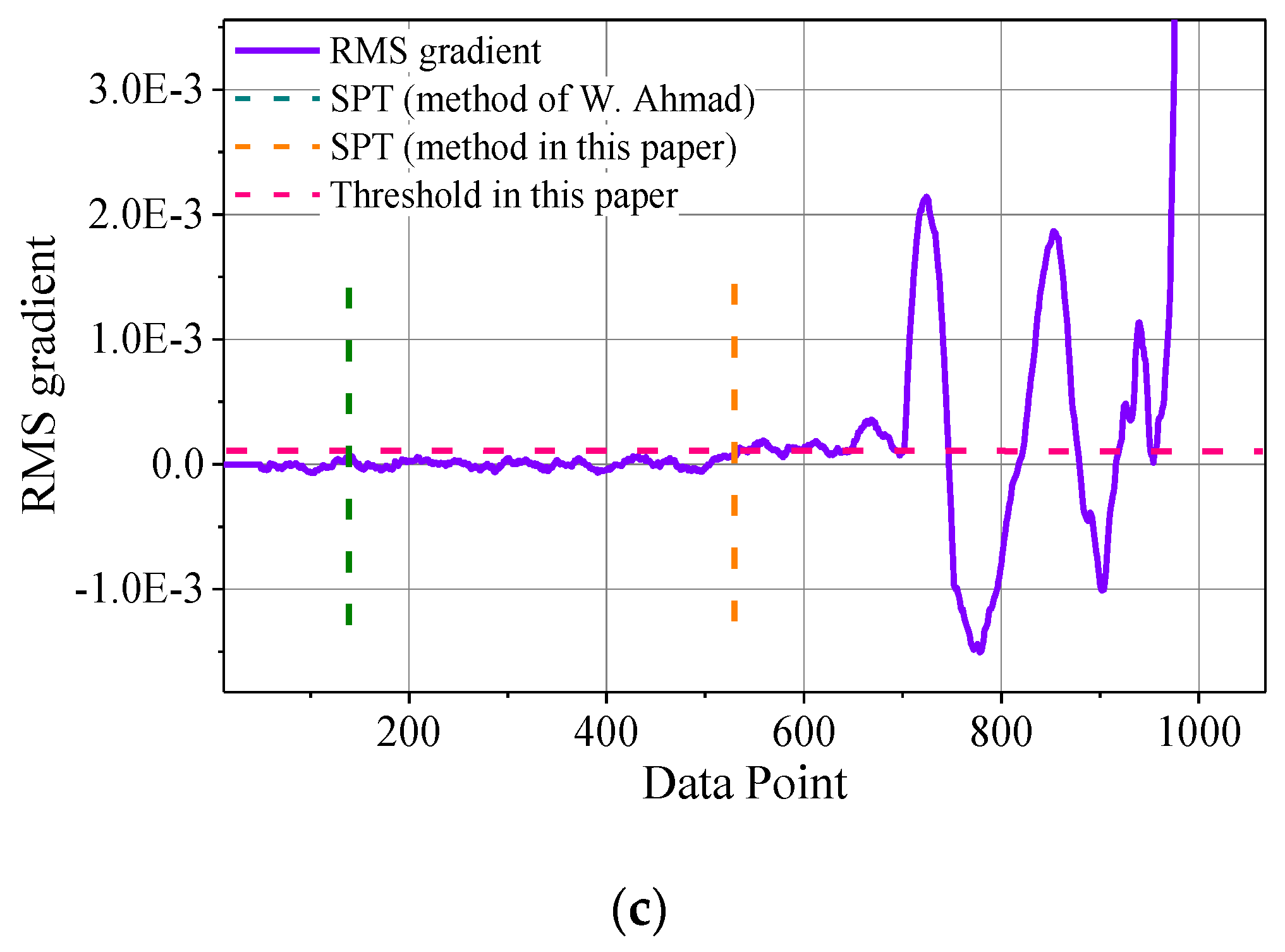
5.2. SPT Point of Experimental Data
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Blodt, M.; Granjon, P.; Raison, B.; Rostaing, G. Models for Bearing Damage Detection in Induction Motors Using Stator Current Monitoring. IEEE Trans. Ind. Electron. 2005, 55, 1813–1822. [Google Scholar] [CrossRef]
- Hosseinzadeh, M.; Salmasi, F. Analysis and detection of a wind system fauilure in a micro-grid. J. Renew. Sustain. Energy 2016, 8, 043302. [Google Scholar] [CrossRef]
- Li, N.; Lei, Y.; Lin, J. An improved exponential model for predicting remaining useful life of rolling element bearings. IEEE Trans. Ind. Electron. 2015, 62, 7762–7773. [Google Scholar] [CrossRef]
- Liao, H.T.; Zhao, W.B.; Guo, H.R. Predicting remaining useful life of an individual unit using proportional hazards model and logistic regression model. In Proceedings of the 2006 IEEE RAMS Annual Reliability and Maintainability Symposium, Newport, CA, USA, 23–26 January 2006; pp. 127–132. [Google Scholar]
- Tian, Z.G.; Liao, H.T. Condition based maintenance optimization for multi-component systems using proportional hazards model. Reliab. Eng. Syst. Saf. 2011, 96, 13041–13049. [Google Scholar] [CrossRef]
- Dong, S.; Wang, J.; Xu, X.; Liu, X. Bearing residual life prediction based on multi-SVM error weighting. Manuf. Technol. Mach. Tools 2017, 12, 103–111. [Google Scholar]
- Ren, L.; Sun, Y.; Hao, H.; Zhang, L. Prediction of bearing remaining useful life with Deep convolution neural network. IEEE Trans. Ind. Inform. 2018, 6, 13041–13049. [Google Scholar] [CrossRef]
- Gebraeel, N.; Lawley, M.; Parmeshwaran, R.L.V. Residual life predictions from vibration-based degradation signals: A neural network approach. IEEE Trans. Ind. Electron. 2004, 51, 694–700. [Google Scholar] [CrossRef]
- Elwany, A.H.; Gebraeel, N.Z. Sensor-driven prognostic models for equipment replacement and spare parts inventory. IIE Trans. 2008, 40, 629–639. [Google Scholar] [CrossRef]
- Gebraeel, N. Sensory-updated residual life distributions for components with exponential degradation patterns. IEEE Trans. Autom. Sci. Eng. 2006, 3, 382–393. [Google Scholar] [CrossRef]
- Yang, B.S. An intelligent condition-based maintenance platform forrotating machinery. Expert Syst. Appl. 2012, 39, 2977–2988. [Google Scholar]
- Ginart, A.; Barlas, I.; Goldin, J.; Dorrity, J.L. Automated features election for embeddable prognostic and health monitoring (PHM) architectures. IEEE Autotestcon 2006, 18, 195–201. [Google Scholar]
- Ahmad, W.; Khan, S.A.; Kim, J.M. A hybrid prognostics technique for rolling Element bearings using adaptive predictive models. IEEE Trans. Ind. Electron. 2018, 65, 1577–1584. [Google Scholar] [CrossRef]
- Qiu, H.; Lee, J.; Lin, J. Wavelet filter-based weak signature detection method and its application on roller bearing prognostics. J. Sound Vib. 2006, 4–5, 1066–1090. [Google Scholar]
- Wang, Y.F.; Kootsookos, P.J. Modeling of low shaft speed bearing faults for condition monitoring. Mech. Syst. Signal Process. 1998, 12, 415–426. [Google Scholar] [CrossRef][Green Version]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Thresholds | Bearing 1 | Bearing 2 | Bearing 3 |
|---|---|---|---|
| μ + σ | 12.36% | 60.21% | 18.62% |
| μ + 2σ | 6.09% | 15.32% | 4.32% |
| μ + 3σ | 6.51% | 14.82% | 3.52% |
| Method | Bearing 1 | Bearing 2 | Bearing 3 | |||
|---|---|---|---|---|---|---|
| SPT (min) | Error (%) | SPT (min) | Error (%) | SPT (min) | Error (%) | |
| Method of W. Ahmad et al. [13] | 18,350 | 13.1 | 12,670 | 30.27 | 1440 | 19.83 |
| Method of N. Li et al. [3] | 19,510 | 5.13 | 18,300 | 10.24 | 7020 | 4.05 |
| Proposed in this paper | 18,680 | 6.09 | 16,280 | 15.32 | 5280 | 4.32 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, C.; Lv, K.; Wu, T.; Si, J.; Hu, Y. Method for Determining Starting Point of Rolling Bearing Life Prediction Based on Linear Regression. Electronics 2019, 8, 923. https://doi.org/10.3390/electronics8090923
Gao C, Lv K, Wu T, Si J, Hu Y. Method for Determining Starting Point of Rolling Bearing Life Prediction Based on Linear Regression. Electronics. 2019; 8(9):923. https://doi.org/10.3390/electronics8090923
Chicago/Turabian StyleGao, Caixia, Ke Lv, Tong Wu, Jikai Si, and Yihua Hu. 2019. "Method for Determining Starting Point of Rolling Bearing Life Prediction Based on Linear Regression" Electronics 8, no. 9: 923. https://doi.org/10.3390/electronics8090923
APA StyleGao, C., Lv, K., Wu, T., Si, J., & Hu, Y. (2019). Method for Determining Starting Point of Rolling Bearing Life Prediction Based on Linear Regression. Electronics, 8(9), 923. https://doi.org/10.3390/electronics8090923