A Signaling-Free Underwater Code Division Multiple Access Scheme



Abstract
:1. Introduction
2. An Overview of the Characteristics of the Underwater Channel and System Model
2.1. The Characteristics of the Underwater Channel
2.2. System Model
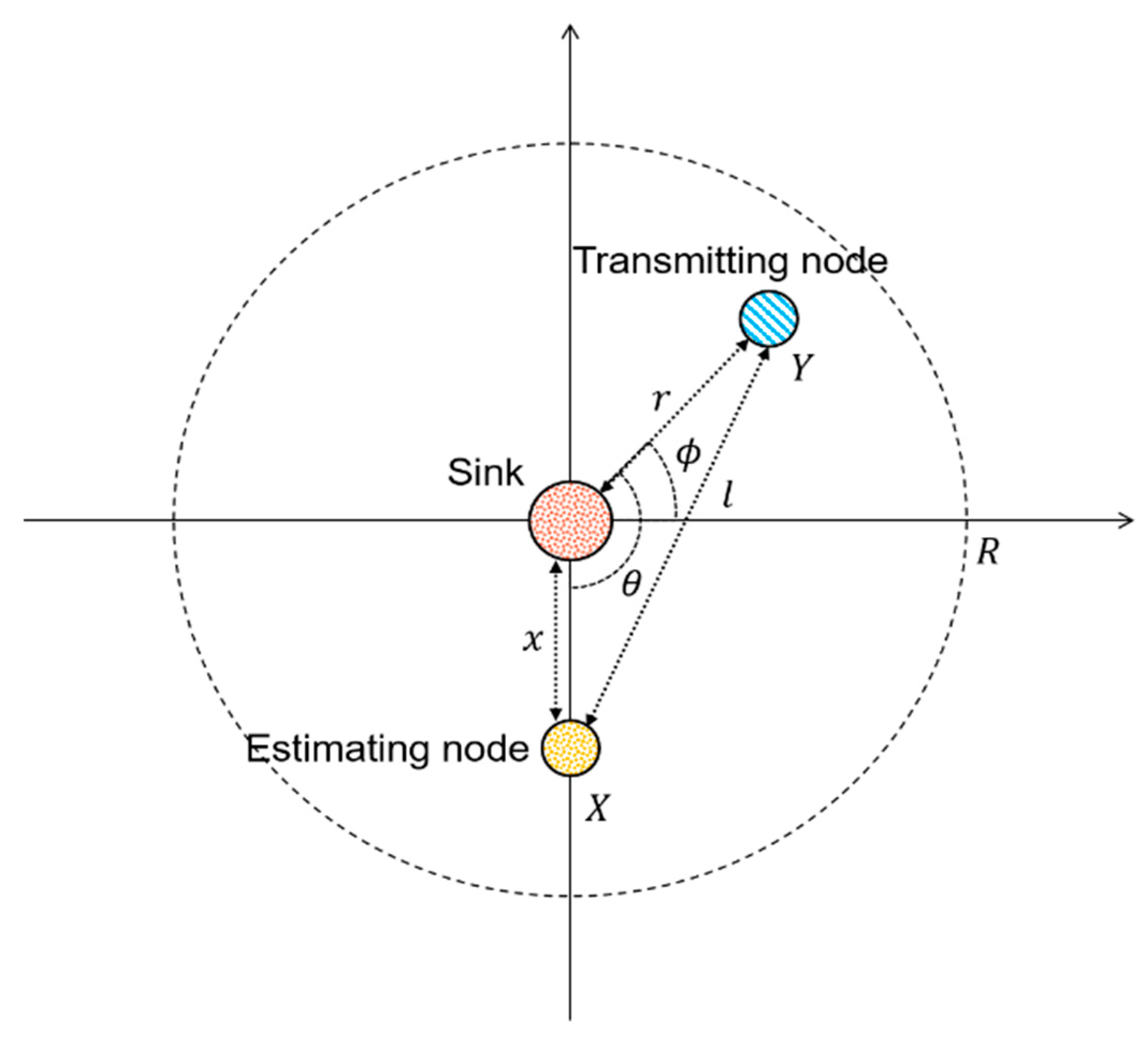
3. Estimating the Number of Nodes in Transmission
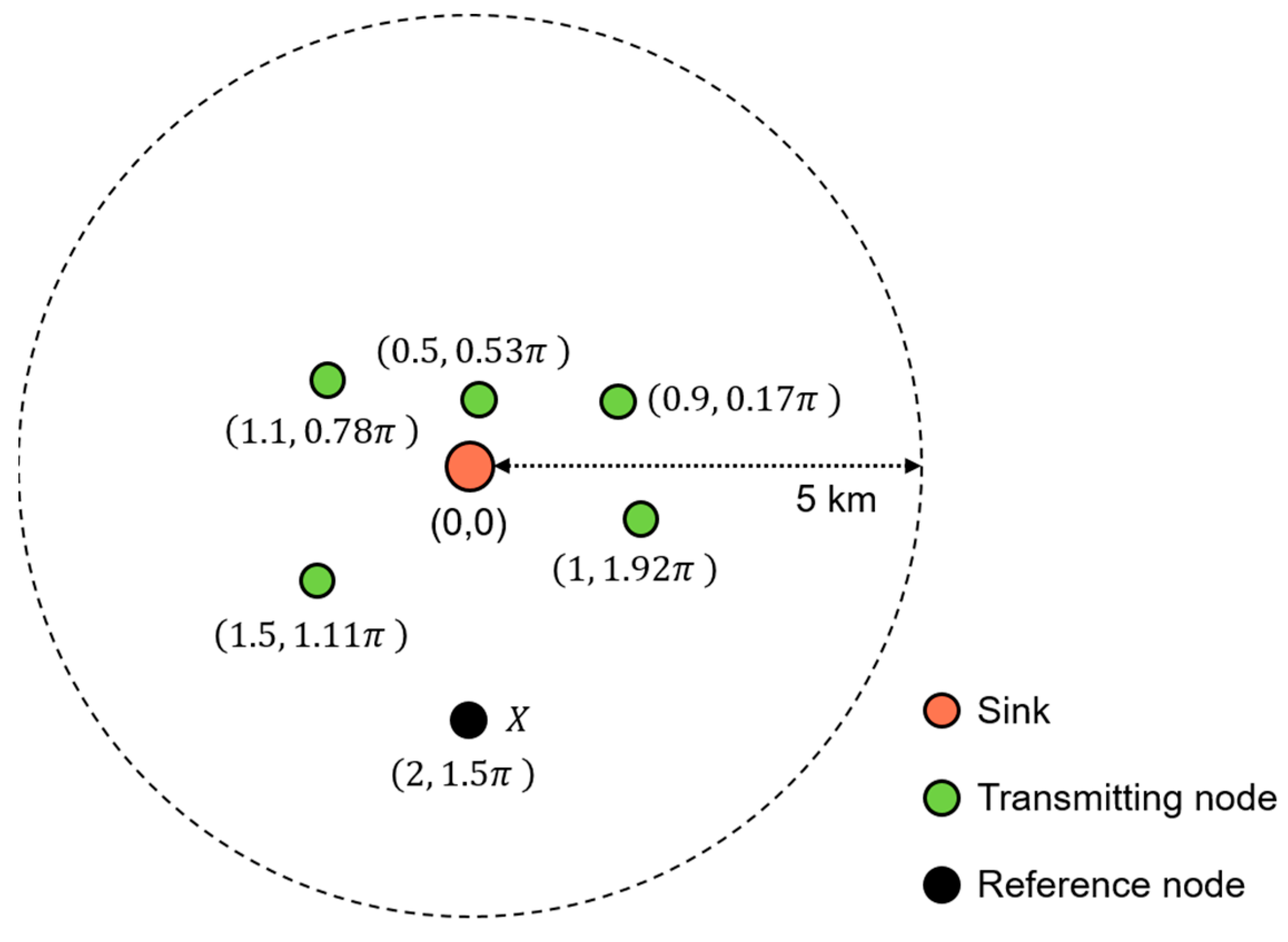
4. An Example of Traffic Estimation
5. Probabilistic Channel Access
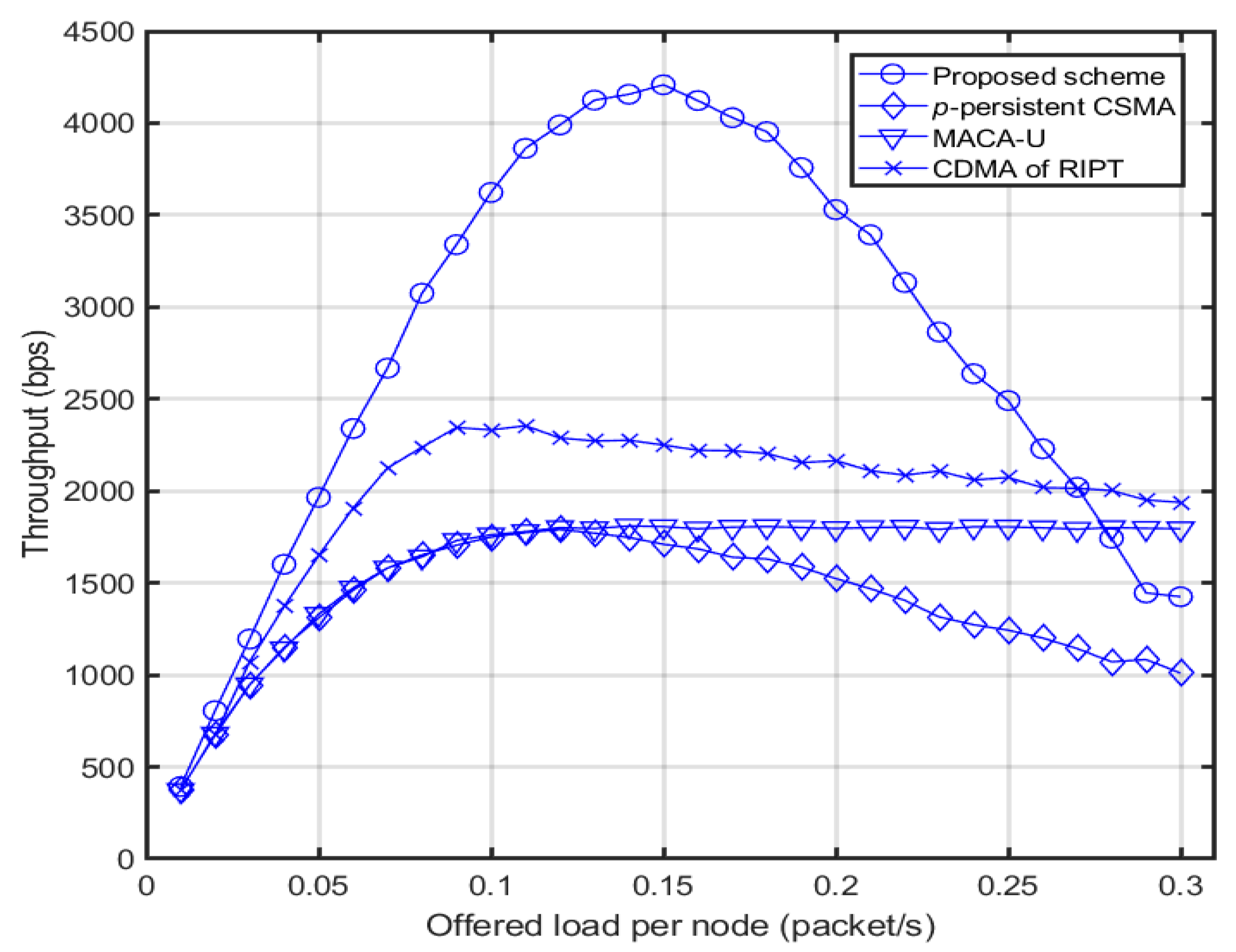
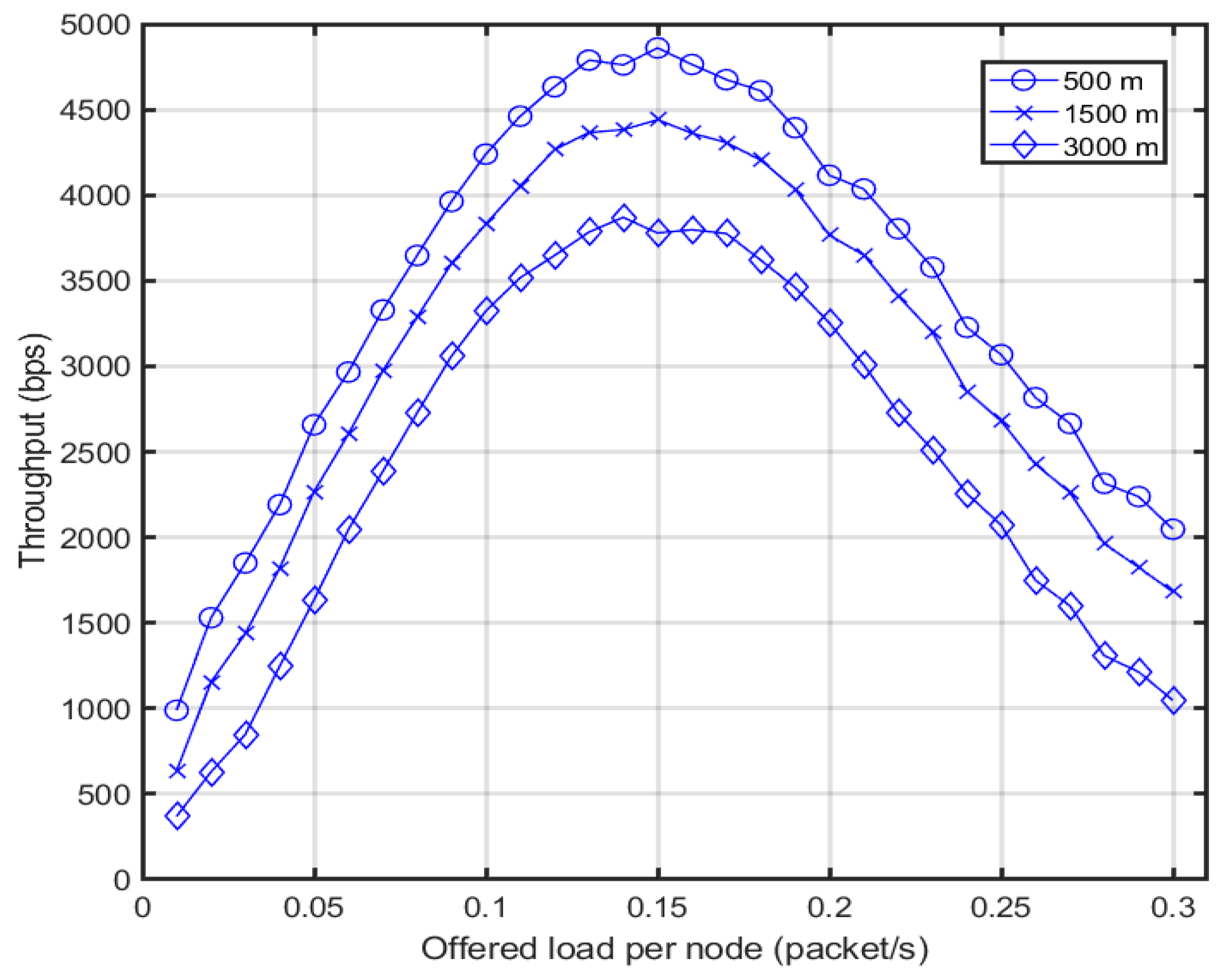
6. Performance Evaluation
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Underwater acoustic sensor networks: Research challenges. Ad Hoc Netw. 2005, 3, 257–279. [Google Scholar] [CrossRef]
- Xavier, L. An Introduction to Underwater Acoustics: Principles and Application; Springer Verlag: Berlin, Germany, 2010. [Google Scholar]
- Stojanovic, M.; Preisig, C.J. Underwater acoustic communication channels: Propagation models and statistical characterization. IEEE Commun. Mag. 2009, 47, 84–89. [Google Scholar] [CrossRef]
- Stojanovic, M. On the Relationship between Capacity and Distance in an Underwater Acoustic Communication Channel. In Proceedings of the First ACM International Workshop on Underwater Networks (WUWNet 2006), Los Angeles, CA, USA, 25 September 2006; pp. 41–47. [Google Scholar]
- Cui, J.-H.; Kong, J.; Gerla, M.; Zhou, S. Challenges: Building scalable mobile underwater wireless sensor networks for aquatic applications. IEEE Netw. Spec. Issue Wirel. Sens. Netw. 2006, 20, 12–18. [Google Scholar]
- Sozer, E.; Proakis, J.; Stojanovic, M.; Rice, J.; Benson, A.; Hatch, M. Direct Sequence Spread Spectrum Based Modem for Underwater Acoustic Communication and Channel Measurements. In Proceedings of the MTS/IEEE OCEANS ’99, Seattle, WA, USA, 13–16 September 1999; pp. 228–233. [Google Scholar]
- Nie, D.; Feng, Y.; Zhen, C.; Zhang, J.; Ning, G. Power control for underwater acoustic MC-CDMA communication networks using the improved PSO algorithm. In Proceedings of the MTS/IEEE OCEANS ’16, Shanghai, China, 10–13 June 2016; pp. 1–4. [Google Scholar]
- Zhen, C.; Feng, Y.; Nie, D.; Zhang, J.; Ning, G. Transmission power allocation for underwater acoustic multicarrier-CDMA communication networks based on genetic algorithm. In Proceedings of the MTS/IEEE OCEANS ’16, Shanghai, China, 10–13 June 2016; pp. 1–4. [Google Scholar]
- Arifeen, M.M.; Tasnim, Z.; Mahmud, M.; Kaiser, M.S. Performance Analysis of MC-CDMA based Underwater Wireless Sensor Network. In Proceedings of the ICACCI 2018, Bangalore, India, 19–22 September 2018; pp. 1919–1924. [Google Scholar]
- Jia, Z.; Yuan, F.; Chen, K.; Cheng, E.; Li, J. Research on Code Division Multiple Access Based on Chirp Multi-Carrier. In Proceedings of the MTS/IEEE OCEANS ’18, Kobe, Japan, 28–31 May 2018; pp. 1–6. [Google Scholar]
- Rahmati, M.; Pompili, D.; Petroccia, R. Collaborative Hybrid ARQ for CDMA-based Reliable Underwater Acoustic Communications. In Proceedings of the Underwater Communications and Networking (Ucomms) 2018, Lerici, Italy, 28–30 August 2018; pp. 1–5. [Google Scholar]
- Shengming, J. State-of-the-Art Medium Access Control (MAC) Protocols for Underwater Acoustic Networks: A Survey Based on a MAC Reference Model. IEEE Commun. Surv. Tutor. 2018, 20, 96–131. [Google Scholar]
- Pompili, D.; Melodia, T.; Akyildiz, I.F. A CDMA-based medium access control for underwater acoustic sensor networks. IEEE Trans. Wirel. Commun. 2009, 8, 1899–1909. [Google Scholar] [CrossRef]
- Chen, H.; Fan, G.; Xie, L.; Cui, J.-H. A Hybrid Path-Oriented Code Assignment CDMA-based MAC Protocol for Underwater Acoustic Sensor Networks. Sensors 2013, 13, 15006–15025. [Google Scholar] [CrossRef] [PubMed]
- Park, S.H.; Mitchell, P.D.; Grace, D. Performance of the ALOHA-Q MAC Protocol for Underwater Acoustic Networks. In Proceedings of the International Conference on Computing, Electronics & Communications Engineering (iCCECE) 2018, Southend, UK, 16–17 August 2018; pp. 189–194. [Google Scholar]
- Geethu, K.S.; Babu, A.V. Improving energy efficiency performance of ALOHA based underwater acoustic sensor networks. In Proceedings of the IEEE Distributed Computing, VLSI, Electrical Circuits and Robotics (DISCOVER) 2016, Mangalore, India, 13–14 August 2016; pp. 277–282. [Google Scholar]
- Khater, E.M.; Ibrahim, D.M.; Saidahmed, M.T.F. Contention-based MAC protocol in UWSNs: Slotted_CS_ALOHA proposed protocol. In Proceedings of the 11th International Conference on Computer Engineering & Systems (ICCES), Cairo, Egypt, 20–21 December 2016; pp. 73–78. [Google Scholar]
- Guerra, F.; Casari, P.; Zorzi, M. World ocean simulation system (WOSS): A simulation tool for underwater networks with realistic propagation modeling. In Proceedings of the ACM Int. Workshop Underwater Netw. (WUWNet), Berkeley, CA, USA, 3 November 2009; pp. 1–8. [Google Scholar]
- Favaro, F.; Azad, S.; Casari, P.; Zorzi, M. Extended abstract: On the performance of unsynchronized distributed MAC protocols in deep water acoustic networks. In Proceedings of the ACM Int. Workshop Underwater Netw. (WUWNet), Seattle, WA, USA, 1–2 December 2011; pp. 1–2. [Google Scholar]
- Jornet, J.M.; Stojanovic, M.; Zorzi, M. On Joint Frequency and Power Allocation in a Cross-Layer Protocol for Underwater Acoustic Networks. IEEE J. Ocean. Eng. 2010, 35, 936–947. [Google Scholar] [CrossRef]
- Chirdchoo, N.; Soh, W.S.; Chua, K. RIPT: A receiver-initiated reservation-based protocol for underwater acoustic networks. IEEE J. Sel. Areas Commun. 2005, 26, 1744–1753. [Google Scholar] [CrossRef]
- Ng, H.-H.; Soh, W.-S.; Motani, M. MACA-U: A Media Access Protocol for Underwater Acoustic Networks. In Proceedings of the IEEE Globecom 2008, New Orleans, LA, USA, 30 November–4 December 2008; pp. 1–5. [Google Scholar]
- LAN/MAN (IEEE 802) Standards Committee. Wireless LAN Media Access Control (MAC) and Physical Layer (PHY) Specifications; IEEE: New York, NY, USA, 1999. [Google Scholar]
- LinkQuest Inc. Available online: http://www.link-quest.com (accessed on 12 November 2018).
- Su, R.; Venkatesan, R.; Li, C. An energy-efficient asynchronous wake-up scheme for underwater sensor networks. Wirel. Commun. Mob. Comput. 2015, 16, 1158–1172. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| n | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|
(dB re 1 μpa) | 67 | |||||
(dB re 1 μpa) | 67 | 70 | 71 | 73 | 74 | 75 |
(dB re 1 μpa) | 73 | 72 | 70 | 68 | 62 (minimum) | 65 |
| 5 | ||||||
| Signaling-Free | Signaling-Based | |
|---|---|---|
| CDMA | Proposed scheme | CDMA of RIPT [21] |
| Non-CDMA | p-persistent CSMA | MACA-U [22] |
| Parameters | Values |
|---|---|
| Data rate | 9600 bps [24] |
| Data packet size | 2000 bits |
| Control packet size | 200 bits |
| CDMA system capacity (C) | 4 |
| Spreading gain | 6 dB |
| Number of sensor nodes | 20 |
| Radius of topology (R) Number of transmitting node Acoustic speed | 5 km 20 1500 m/s |
| Bandwidth | 20 kHz |
| Center frequency | 15 kHz |
| Transmission probability of CSMA (p) Simulation time | 0.5 3600 s |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Seo, B.-M.; Cho, J.; Cho, H.-S. A Signaling-Free Underwater Code Division Multiple Access Scheme. Electronics 2019, 8, 880. https://doi.org/10.3390/electronics8080880
Seo B-M, Cho J, Cho H-S. A Signaling-Free Underwater Code Division Multiple Access Scheme. Electronics. 2019; 8(8):880. https://doi.org/10.3390/electronics8080880
Chicago/Turabian StyleSeo, Bo-Min, Junho Cho, and Ho-Shin Cho. 2019. "A Signaling-Free Underwater Code Division Multiple Access Scheme" Electronics 8, no. 8: 880. https://doi.org/10.3390/electronics8080880
APA StyleSeo, B.-M., Cho, J., & Cho, H.-S. (2019). A Signaling-Free Underwater Code Division Multiple Access Scheme. Electronics, 8(8), 880. https://doi.org/10.3390/electronics8080880