1. Introduction
A driver’s drowsiness is one of the main causes of traffic accidents. According to recent studies [
1], up to 30% of deadly car crashes are known to be associated with sleepy driving or driver’s fatigue. Thus, the problem of detecting driver’s fatigue or drowsy conditions is very important for the prevention of car accidents in real life. Until now, there have been many studies that automatically detect drowsiness of driver based on various bio-signals. The heartbeat signal is one of the most common signals for this purpose and has the advantage that it is relatively easy to measure non-invasively in a driving situation with a wearable device.
According to Reference [
2], the state of sleep (particularly, NREM sleep) shows the reduction in physiological activity where both breathing and the heart rate slow down. Moreover, breathing becomes deeper and more regular with deep sleep [
3]. Particularly, in driving situations, it was shown that respiratory frequency tends to decrease, while respiratory regularity tends to increase, in the drowsy state [
4,
5]. Thus, respiration information has been often used to assess drivers’ drowsiness [
6,
7,
8,
9,
10,
11,
12]. Respiration characteristics of a specific time range have been often estimated from the power spectrum of the respiration signal in the time range. For example, in the study of Vincente et al [
5], two measures of dominant respiration power (DRP) and DRP percentage (DRP
%) were extracted from the power spectrum of respiration to capture respiratory regularity. Here, the DRP was calculated by first estimating dominant respiration frequency (DRF) from the power spectrum of respiration and then integrating power around DRF. DRP
% was obtained by taking the ratio of DRP to the total power of the spectrum. The larger values of DRP and DRP
% indicate that the respiration power is more concentrated at the narrow region around a specific frequency. Thus, such measures can be understood as reflecting the degree of the regularity of respiration. Similarly, Takahashi et al [
11] measured the respiration curve from strain gage bandaged at the abdominal region, and estimated peak power frequency (i.e., DRF) and median power frequency (MDF) from the respiration power spectrum. They showed the DRF, MDF, and the difference between DRF and MDF are related to sleepiness level. Here the difference between DRF and MDF reflects the degree of respiration regularity like DRP
%.
On the other hand, some attempts have been made to investigate respiration characteristics from other measurements of respiration signals. For instance, Lee et al [
7] extracted the second peak in the autocorrelation function of the respiration signal over time and considered it as reflecting the regularity of respiration. The higher value of the peak indicates that the respiration signal is more strongly correlated to the lagged version of the signal, implying higher regularity of respiration. Long et al. [
13] measured the respiration signal from respiratory inductance plethysmography (RIP) and used the sample entropy method to estimate the regularity of the respiration signal. They confirmed that the estimated regularity can be effective to discriminate wake and light sleep.
It has been known that breathing activity can be approximately estimated from HRV signal, in particular, from the high frequency (HF) band (i.e., 0.15–0.4Hz) of HRV signal [
14]. Thus, the HF band of HRV power spectrum can be regarded as the substitute for respiration power spectrum. Some researchers examined the HRV-derived dominant respiration activity and showed its usefulness in drowsiness detection. For example, Tateno et al [
15] estimated the breathing numbers from heart rate signals obtained by pulse wave sensor and showed that the estimated numbers are very close to actual breathing numbers. From these results, they confirmed that the use of respiratory signal derived from the heart rate signal is more useful to detect drowsiness than the use of the heart rate signal itself. Also, Bourghelle et al [
16] estimated breath-breath intervals (BBIs) from twenty-lead ECG signal and demonstrated that the BBI mean and difference between BBI max and BBI min can be helpful to detect driver drowsiness. Similarly, Vincente et al [
5] showed that the measure of DRP
% derived from 2-min two-lead ECG signal can improve the performance of drivers’ drowsiness detection.
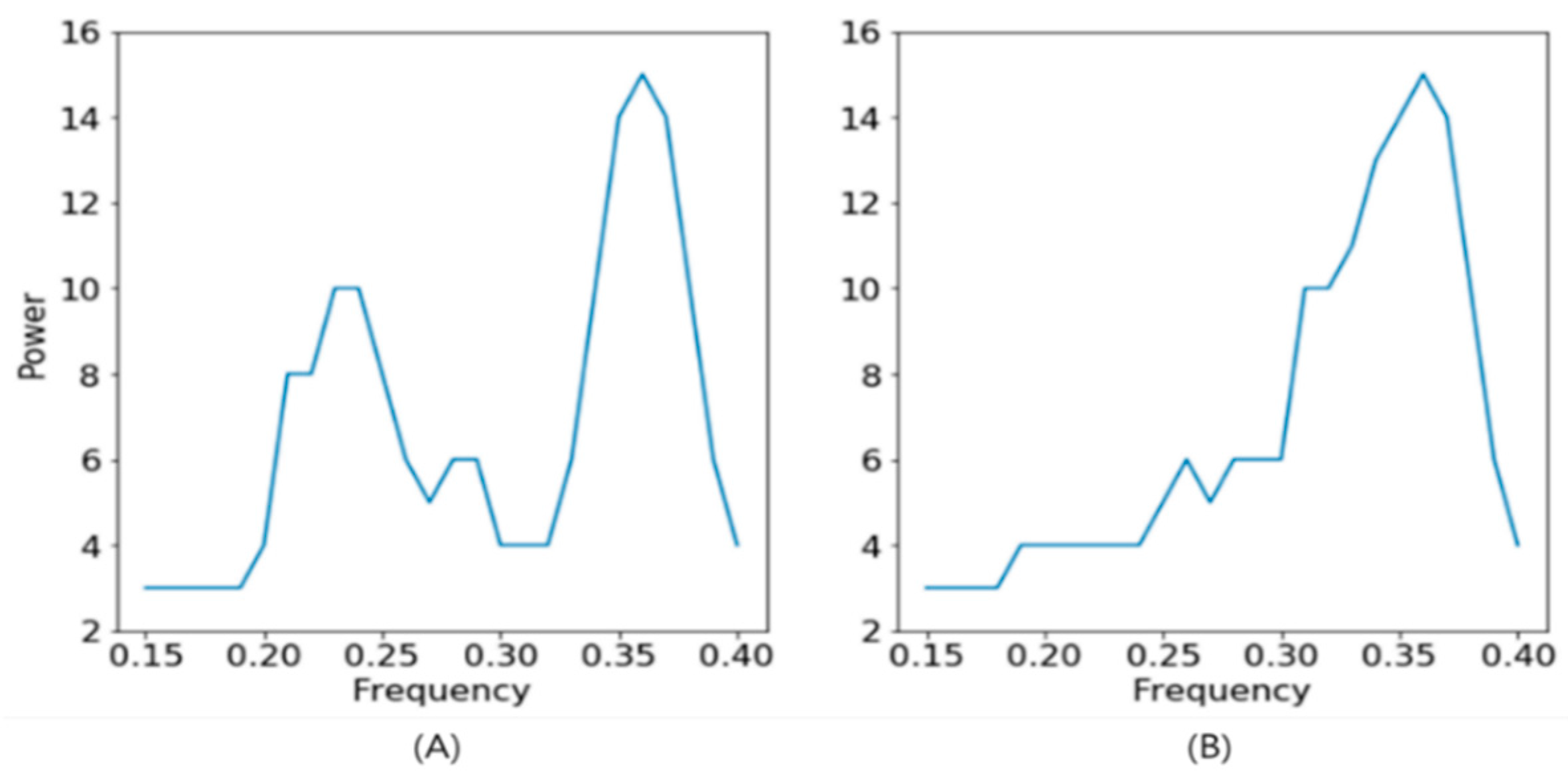
In spite of their usefulness, however, the measures of dominant respiration activity (like DRF or DRP
%) may not be enough to capture breathing activity in the drowsy state. For example, in some situations where emphasized power in a power spectrum of HRV occurs at multi sub-frequency like
Figure 1, DRF or DRP
% may possibly fail to provide overall respiration characteristics. In this figure, both cases of (a) and (b) have almost the same DRP
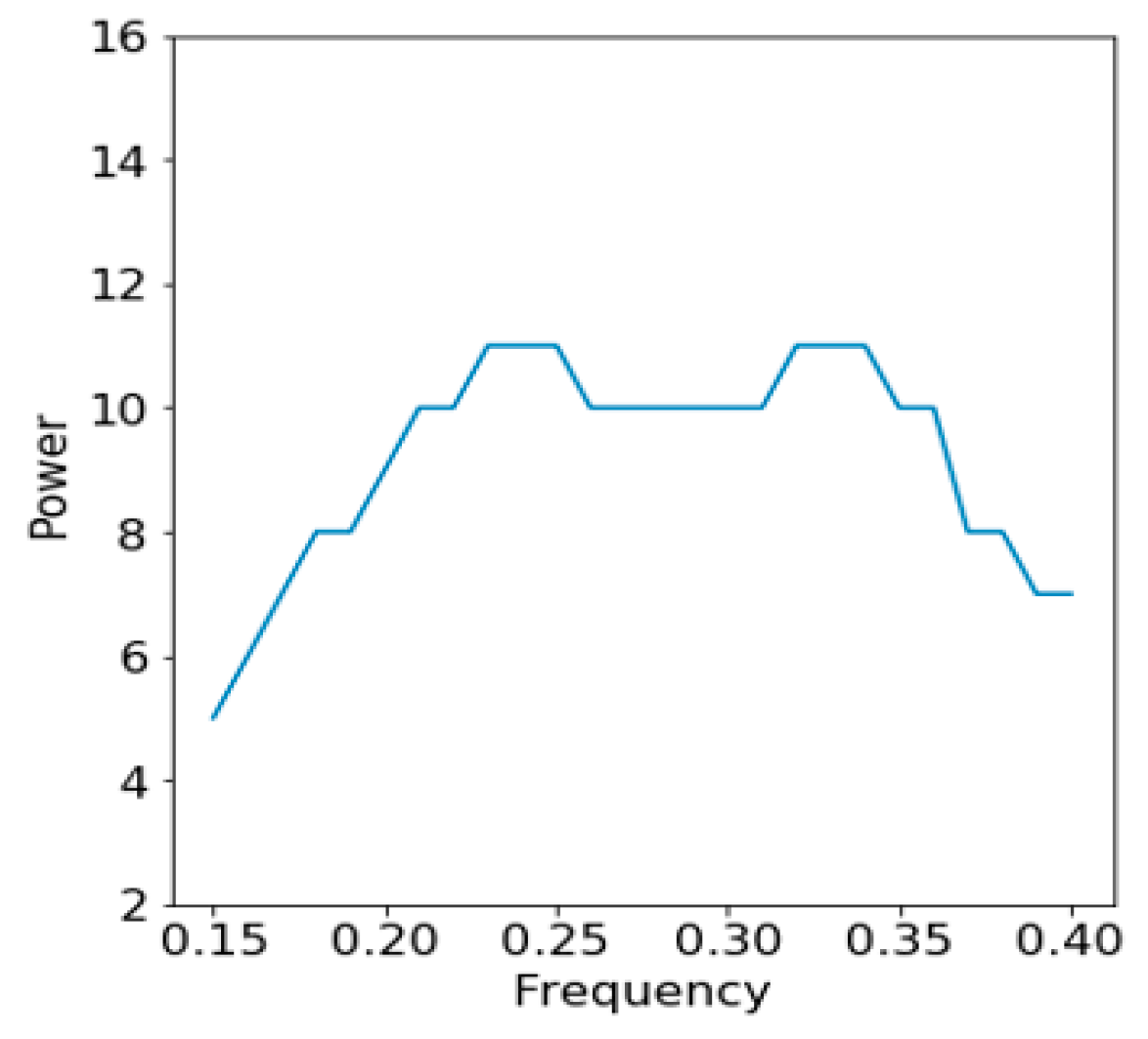
%, although they have different respiration characteristics. In addition, there are other situations, like
Figure 2, where it is difficult to define a single peak point in the power spectrum. Therefore, it seems worthwhile to investigate new HRV-derived measurements that can well capture the differentiated activities of breathing between drowsy and wake states.
In this paper, we aim to investigate new measures for the HRV-derived respiration power spectrum that well reflects the characteristics of respiration related to driver’s drowsiness. For this purpose, we suggest two new spectral measures that can capture the overall shape of respiratory activity shown through the HF band of the HRV power spectrum, not requiring to find dominant respiration frequency. To evaluate the usability of the proposed measures, we employed them as input features to classification model for driver drowsiness detection and evaluated which of existing dominant respiratory measures and two proposed measures are more effective in assessing driver’s drowsiness. This study has been done based on the assumption that the information of respiratory characteristics can be extracted from HRV signals obtained with wearable devices, even in driving situations.
2. Materials and Methods
2.1. Data Collection and Preprocessing
A virtual driving environment was set by using the FANATEC virtual driving hardware set and the Euro Truck Simulator 2 program as shown in
Figure 3. The hardware set consists of a steering wheel, a pedal and a chair, which provides a very similar environment to actual driving. Originally, we collected 37 recordings of 6 subjects with a strap type of wearable ECG device under the environment. Out of 37, however, those with more than 1% of poorly measured RR-interval values (RRIs) were excluded from this study. Thus, we finally used 20 recordings of 6 subjects for experiments. Here all subjects gave their informed consent for inclusion before they participated in the study. The study was conducted in accordance with the Declaration of Helsinki. The subjects were composed of 5 males and 1 female having no sleep-related illness between the ages of 25 and 35. The data collection was made carefully under some constraints that participants should not have caffeine drink at least 4 h before measurement. They were also asked to drive over 1 h without breaks on the same virtual route, provided by the simulator program, more than 80% of which is a straight course or a gentle curve course. In addition, each subject was guided to do his (or her) best to keep the lane steady along the path, while keeping as close to 80–90 km/h speed as possible and minimizing unnecessary movements for driving. Under such environments, HRV data (i.e., RRIs) were collected via a PolarH7 device which is a comfortable wearable electrocardiogram (ECG) instrument. The average running time of each recording was approximately 67 min. For the labeling purpose of drowsiness, we additionally recorded two videos of the driver’s upper body and simulator screen, respectively, at the rate of 15 fps.
For noise filtering, such RRIs having the values greater or less than 20% of the mean of the neighboring 10 RRIs were considered as poorly measured values and removed out. This process was repeated until there is no RRI to be removed. Those recordings with more than 1% of RRIs filtered out were excluded from this study. Then we performed cubic interpolation with the remained RRI sequence and obtained new RRI data having a constant time interval at the sampling rate of 0.5 seconds.
2.2. Labeling Driver’s Drowsiness
For drowsiness labeling of the HRV data, we defined the drowsy event as the state in which a subject cannot drive properly due to drowsiness, or the state in which a subject is judged to fall into sleep very soon. On the other hand, the ‘wake’ state means that a subject is in the state of showing no or only a little drowsy phenomenon while keeping stable driving.
The labeling of each recording was done based on the presumption that if no rests are taken after the first occurrence of a drowsy event, the drowsiness of a subject will maintain until the end of a recording. Thus, the first occurrence of a drowsy event in a recording was found based on the criteria given in
Table 1. To define the criteria of drowsiness, as in Reference [
17], we considered two main aspects: Whether a car runs steadily (monitored by simulator screen video), and whether a driver is sufficiently focusing on driving (monitored by driver upper body video). Once a drowsy event is found, each 1-min RRI before the first drowsy event was labeled as ‘wake’, while every 1-min RRI after the first drowsy event was labeled as ‘drowsy’. If one drowsy event or more is found in a 1-min epoch, all subsequent epochs including the epoch were labeled as ‘drowsy’. The epoch size was set to be 1 min. As a result, for all recording data with 1342 min long, 384 epochs were labeled as ‘wake’ and 958 epochs were labeled as ‘drowsy’.
2.3. Calculating Dominant Respiration Measures
To find dominant respiration characteristics, we first set the time-points every 0.5 s in a recording. The power spectrum for each time-point was then obtained with 12 s neighboring RRI data centered on the time-point by using fast Fourier transform (FFT) and bandpass filtering. The range of finite impulse response (FIR) bandpass filter was set between 0.15 Hz and 0.5 Hz. Finally, we considered FFT power spectrum filtered by the bandpass filter as the HRV-derived respiration power spectrum.
From the power spectrum, we need to identify potential DRFs. First, we set the window size of 0.05 Hz with shift by 0.005Hz and calculated the ratio of integrated power in the window to total power in full range for each window. If the ratio values are less than 0.35, we set them to zero, because the dominant respiration frequency should have a power ratio of at least 0.35 according to Bailón et al. [
14]. Then, to find a DRF in a specific time range, we built power spectrums for each time-point defined in the given time range, and for each window of frequency in the power spectrums, calculated the average of the integrated power ratios over the time-points in a given time range. Out of the averaged power ratios for each window of frequency, we selected the frequency window with the highest ratios as the DRF and used its power ratio as the DRP
% for the given time range.
In this study, we set the length of time range as 120 s or 40 s. The length of 40 s was chosen for comparison with the Bailón’s work, and the length of 120 s was chosen because it showed empirically good results. Hereinafter, we denote ‘DRF’ and ‘DRP%’ for dominant respiration frequency and power ratio based on 120 s signal length, respectively. We denote ‘DRF40’, ‘DRP40%’ based on 40 s signal length. For experiments, we set time-points every 0.5 s in a recording and calculated DRF, DRP%, DRF40, and DRP40% for each time-point.
2.4. Calculating the Proposed Measures
To well distinguish the regularity of breathing between wake and drowsy states, we proposed the two spectral measures, the weighted mean (WM) and the weighted standard deviation (WSD), of the HF band in an HRV-derived power spectrum. These measures can be obtained by using the power values of all sub-frequencies in the spectrum as weights. Specifically, for a given time range of RRI data, the power spectrum is obtained, just as in calculating dominant respiration measures, except with 120 s RRI data or 40 s RRI data. With these spectrums, the proposed measures of WM and WSD are then calculated by using the following Equation (1).
where
and W
f is a power value at the given frequency f of the HRV-derived respiration power spectrum.
For convenience, hereinafter, we denote WM and WSD for 120 s data, while denoting WM40 and WSD40 for 40 s data. Since WM reflects the average frequency of respiration weighted by power values and WSD reflects the degree of respiration irregularity, by combining them together, they are expected to somewhat capture overall characteristics of HRV-derived respiration power spectrum. Particularly, the large value of WSD implies that there exists a high degree of respiration irregularity.
2.5. Calculating Existing HRV Measures
Many earlier studies have often used some HRV related measures for drowsiness detection. Thus, we calculated and used several commonly used HRV measures for comparison, which include low frequency (LF) power, low frequency (HF) power, LFHF power ratio, and very LF (VLF) power, in predicting drowsy states of the driver. Here, to obtain integral power, we used the power spectrum obtained with RRI data of 120 s.
2.6. Feature Extraction for 1-Minute Epoch
Because labeling was done in 1-minute epochs, we also obtained the summarized measures for each 1-minute epoch and used them to learn a prediction model for drowsiness detection. To define the summarized measures for 1-minute epoch, we used four summation method, including minimum (Min), maximum (Max), arithmetic mean (Mean) and standard deviation (STD). Since all the measures in this study are calculated every 0.5 s in a recording, we can have 120 values for each 1-minute epoch, and obtain four summarized values (Min, Max, Mean, STD) from them with each measure. Along with them, we also employed their normalized values for experiments, which are obtained by subtracting out the mean value of the first 3 min data of each recording from the original values of every epoch in the recording. Eventually, for each measure, we generated 8 feature values (including Min, Max, Mean, STD, Min_nor, Max_nor, Mean_nor, and STD_nor).
4. Discussion
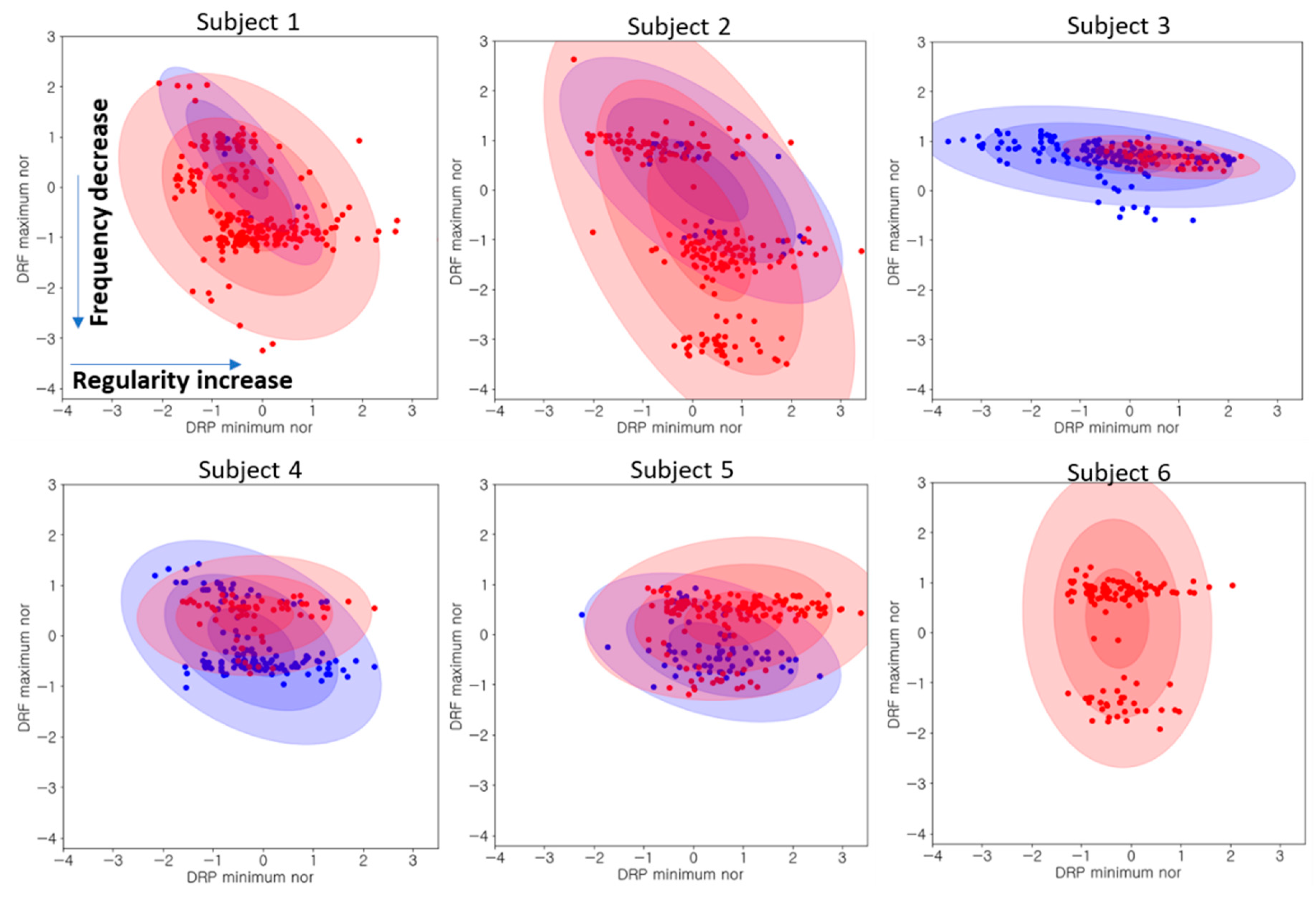
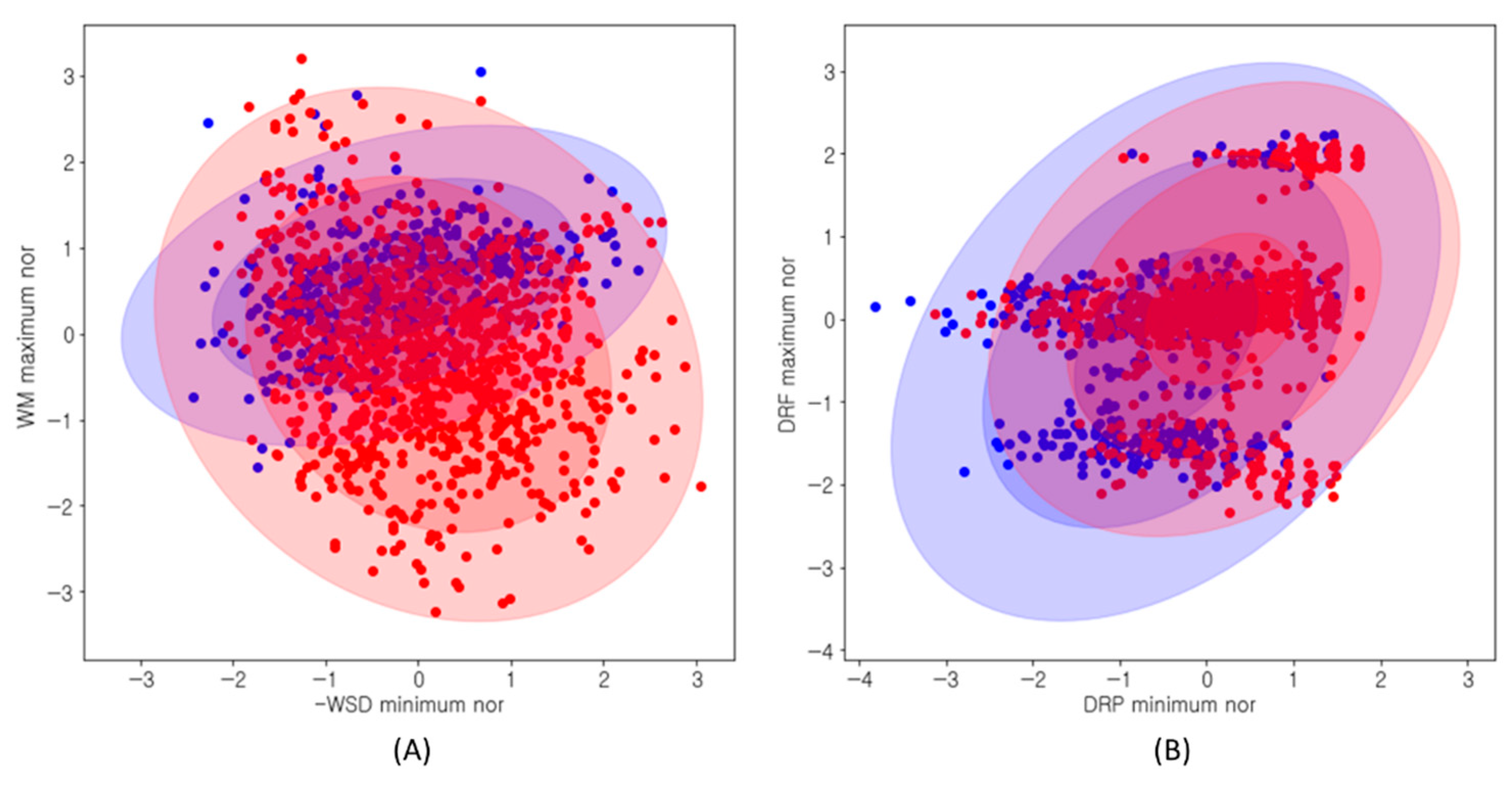
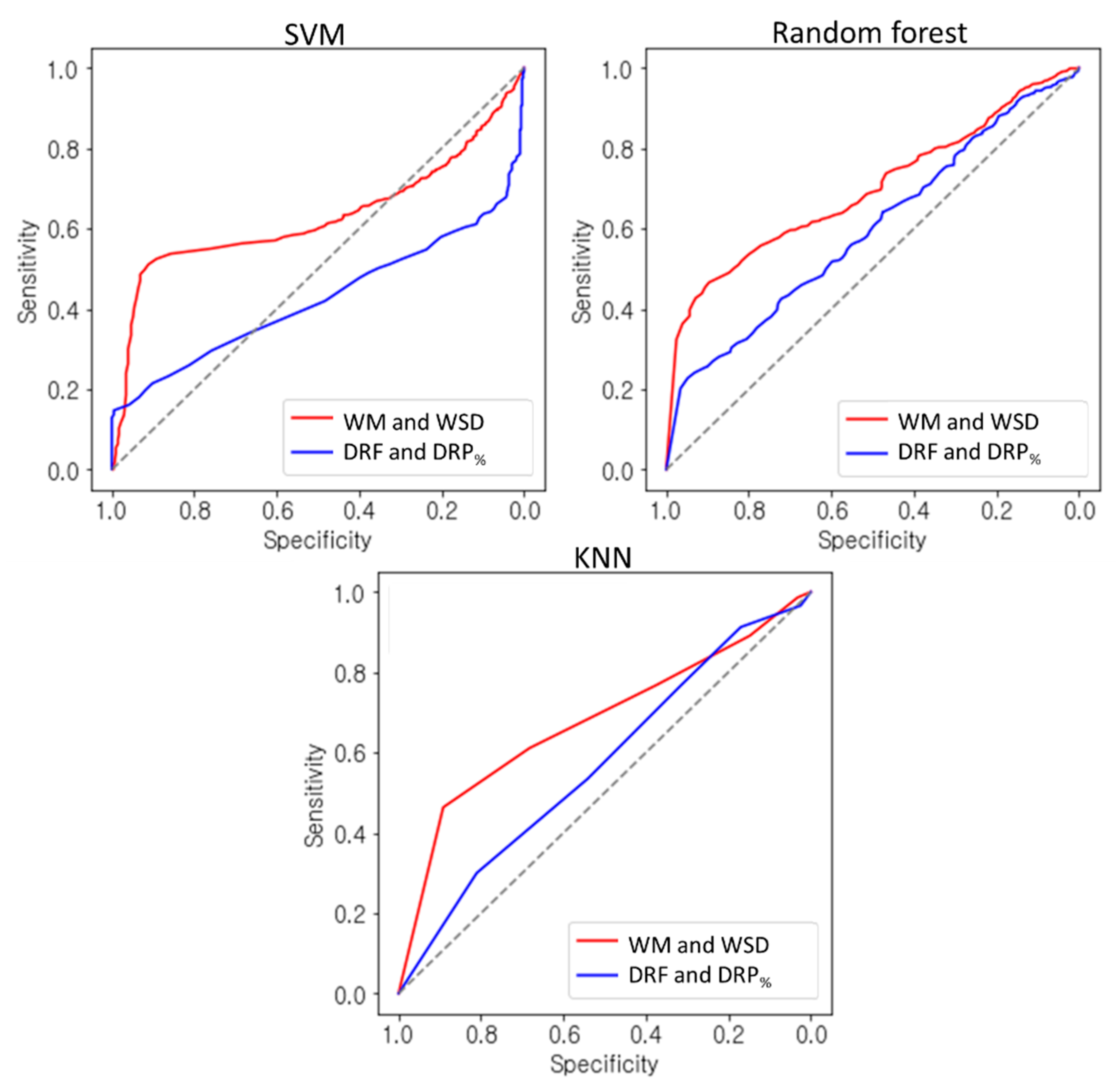
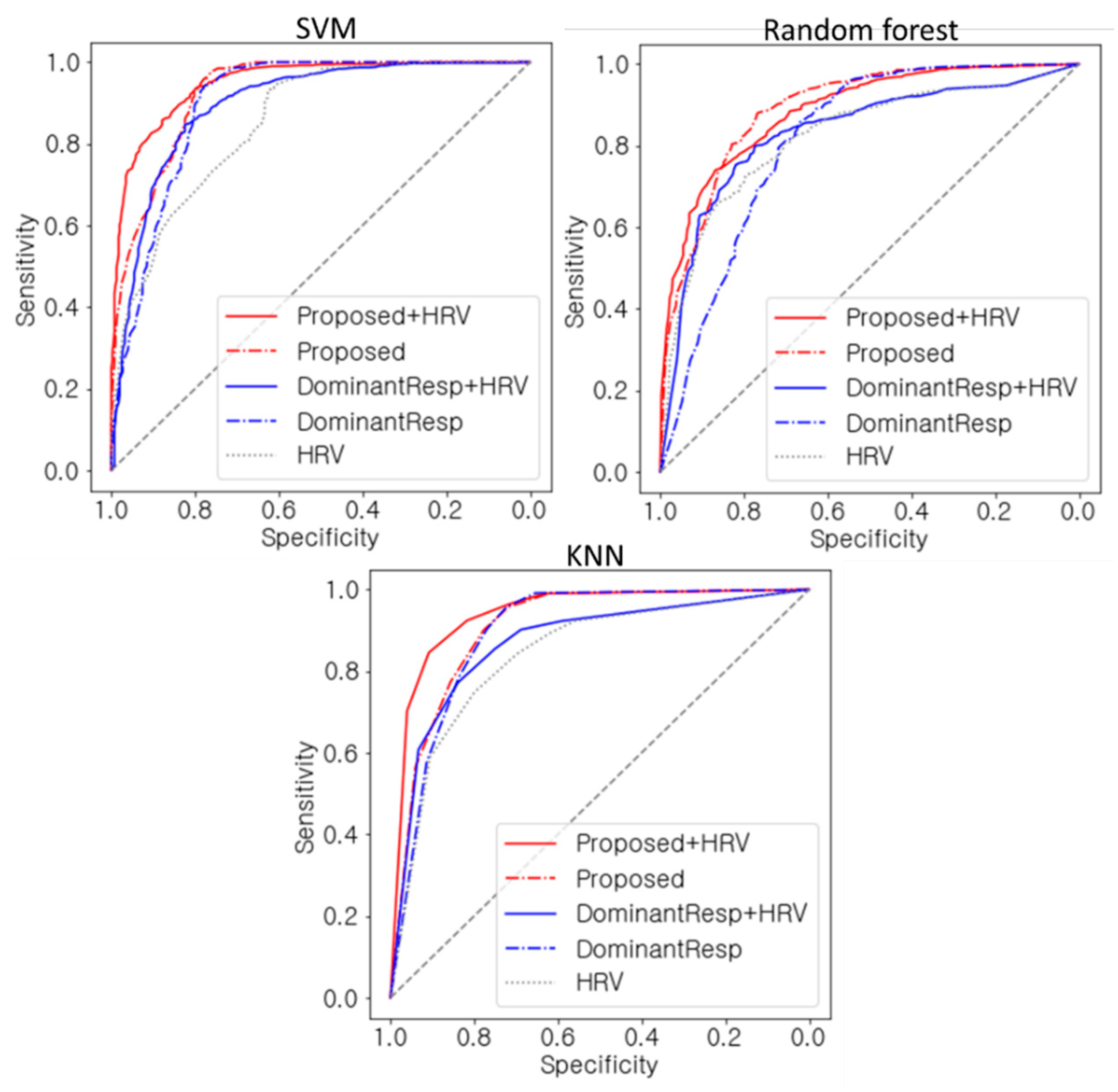
In this study, we suggested new spectral measures applicable to HRV-derived respiration power spectrum and looked into their usefulness for drowsiness detection in driving situations. Unlike earlier works, the proposed approach does not focus on dominant respiration characteristics. Rather, it focuses on capturing the overall shape of the respiration power spectrum. Thus, this method can be more widely employed than existing respiration measures, even in such cases that dominant respiration characteristics are hard to find. Furthermore, the proposed measures showed better performance in drowsiness detection than existing HRV or respiration measures and could be used in conjunction with HRV measures to further improve predictive performance. These results demonstrate that the proposed measures can be good indicators for drowsiness detection. This may be due to the fact that the feature space of the proposed two spectral measures (i.e., WM and WSD) is more separable than the feature space of existing respiration measures (i.e., DRF and DRP
%) between drowsy and wake states, as shown in
Figure 4,
Figure 5 and
Figure 6. As expected, it has been also observed that respiratory frequency (captured by WM) tends to be lower and breathing regularity (captured by WSD) tends to be higher in the drowsy state. On the other hand, this phenomenon was not well observed in the feature space of dominant respiration measures (i.e., DRF and DRP
%).
This approach can be quite useful in situations where HRV data is collected with wearable sensors because the proposed measures are based on HRV-induced respiratory characteristics. Moreover, it is more interesting that using two proposed measures of respiration together with conventional HRV measures (like LF/HF power ratio), which are easily obtainable from HRV data, can help to further improve predictive performance in detecting a driver’s drowsiness. In addition, this method shows a good ability to capture common phenomenon of respiratory traits in multiple subjects. Accordingly, in reality, it is expected that the steady accumulation of HRV data for a large number of subjects may lead to building more reliable prediction models, providing further improvement in drowsiness detection.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}