Sub-Aperture Partitioning Method for Three-Dimensional Wide-Angle Synthetic Aperture Radar Imaging with Non-Uniform Sampling

Abstract
:1. Introduction
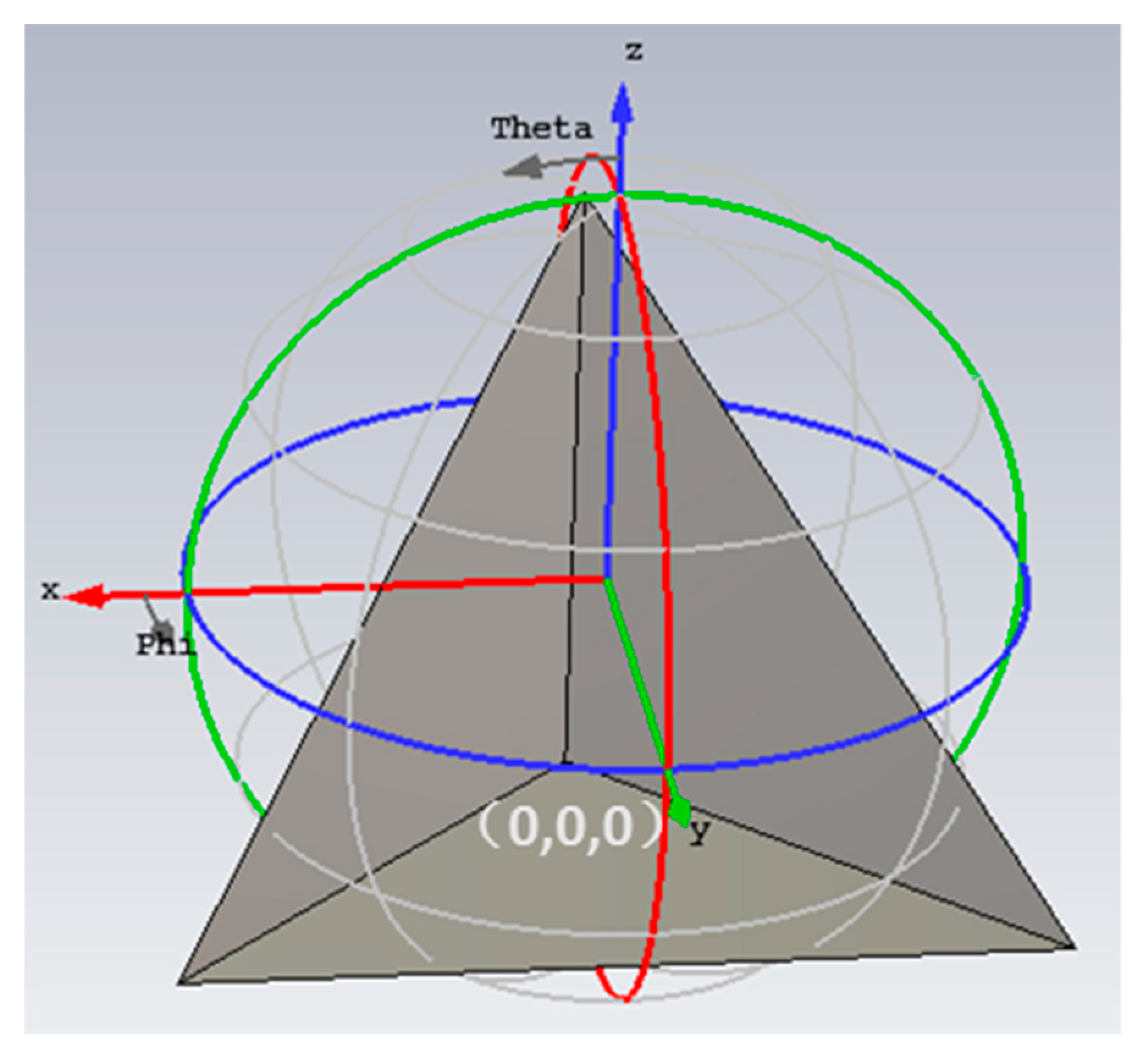
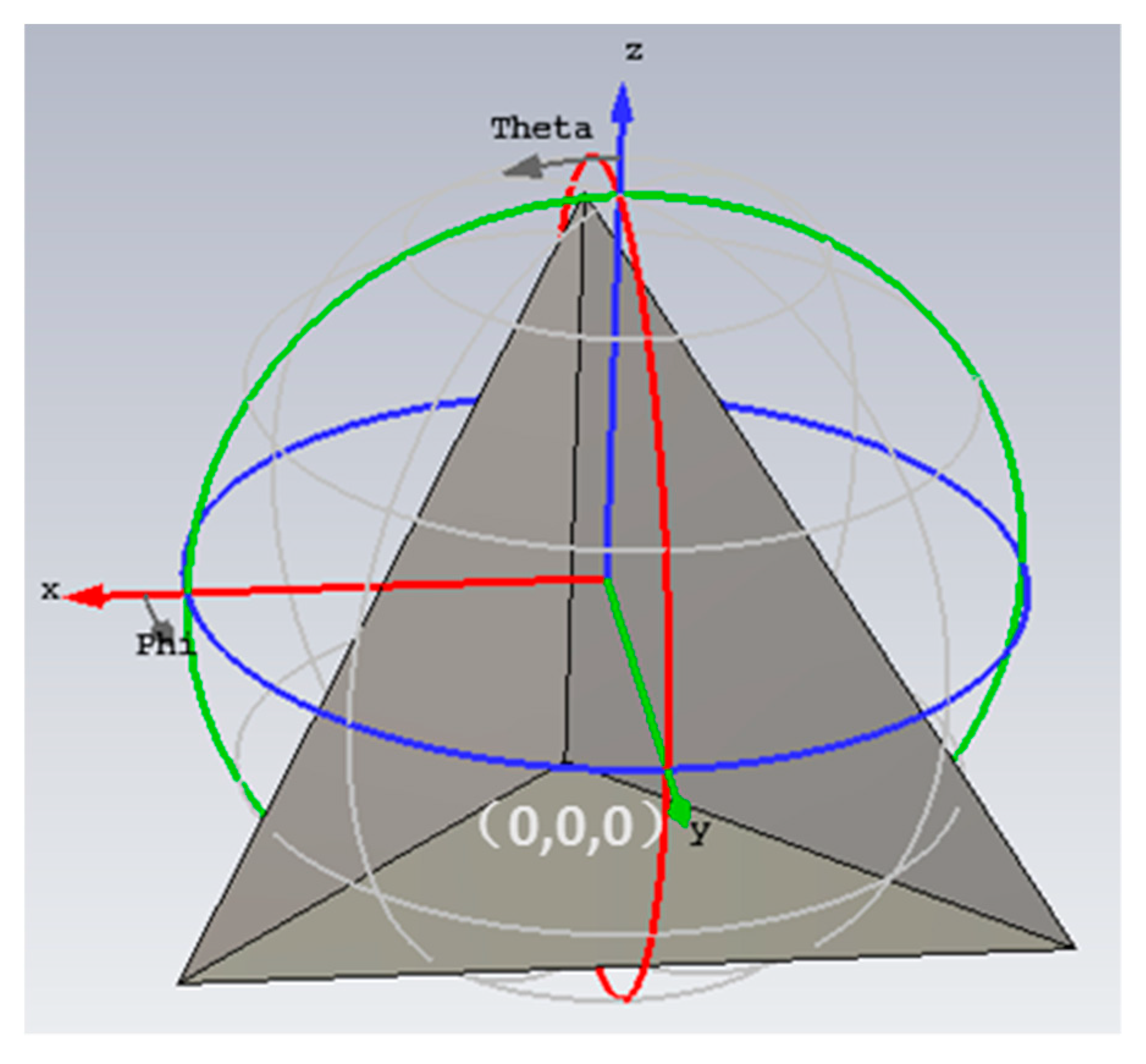
2. Signal Model
3. 3-D Resolution Estimation Based on Cramer–Rao Lower Bound (CRLB)
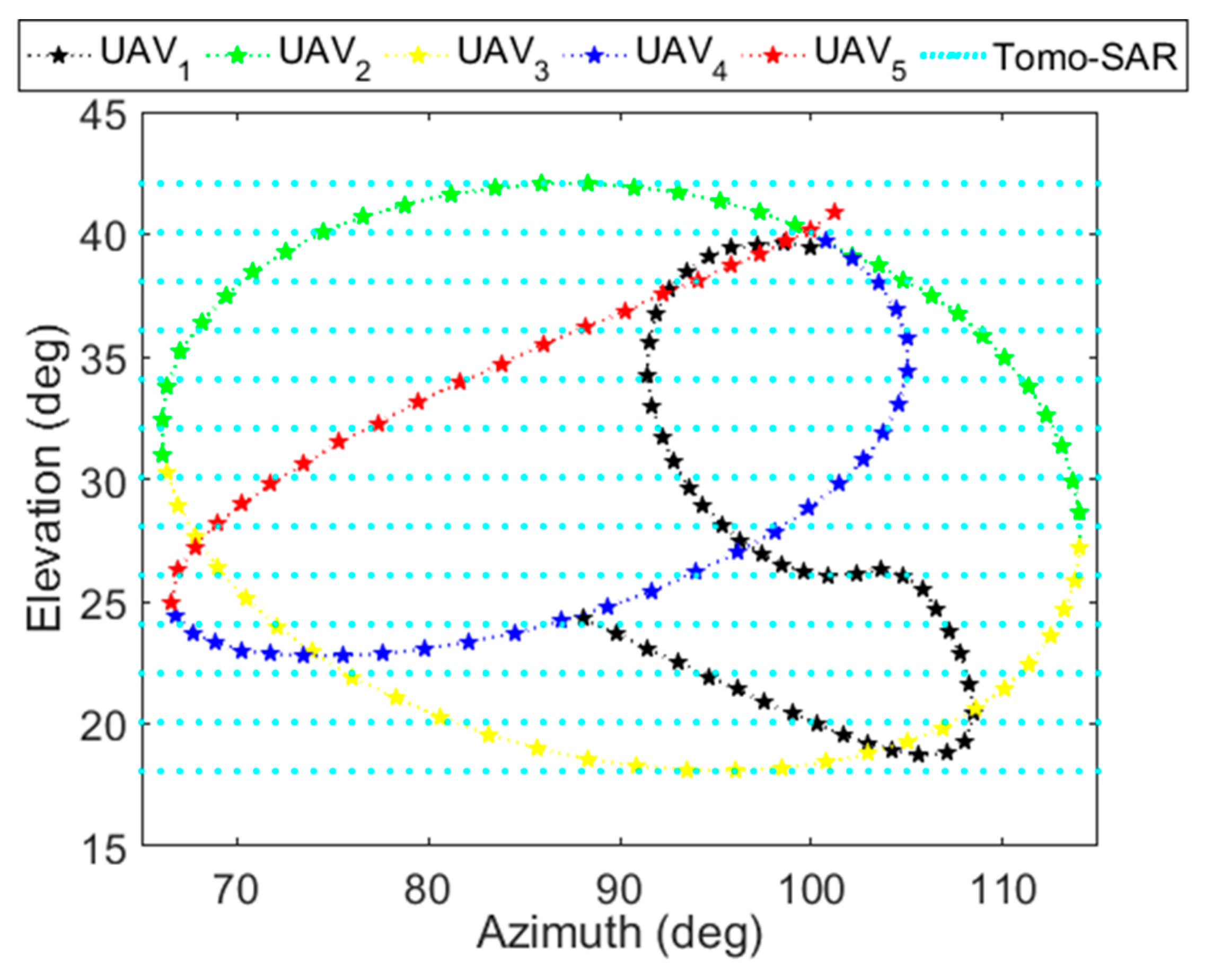
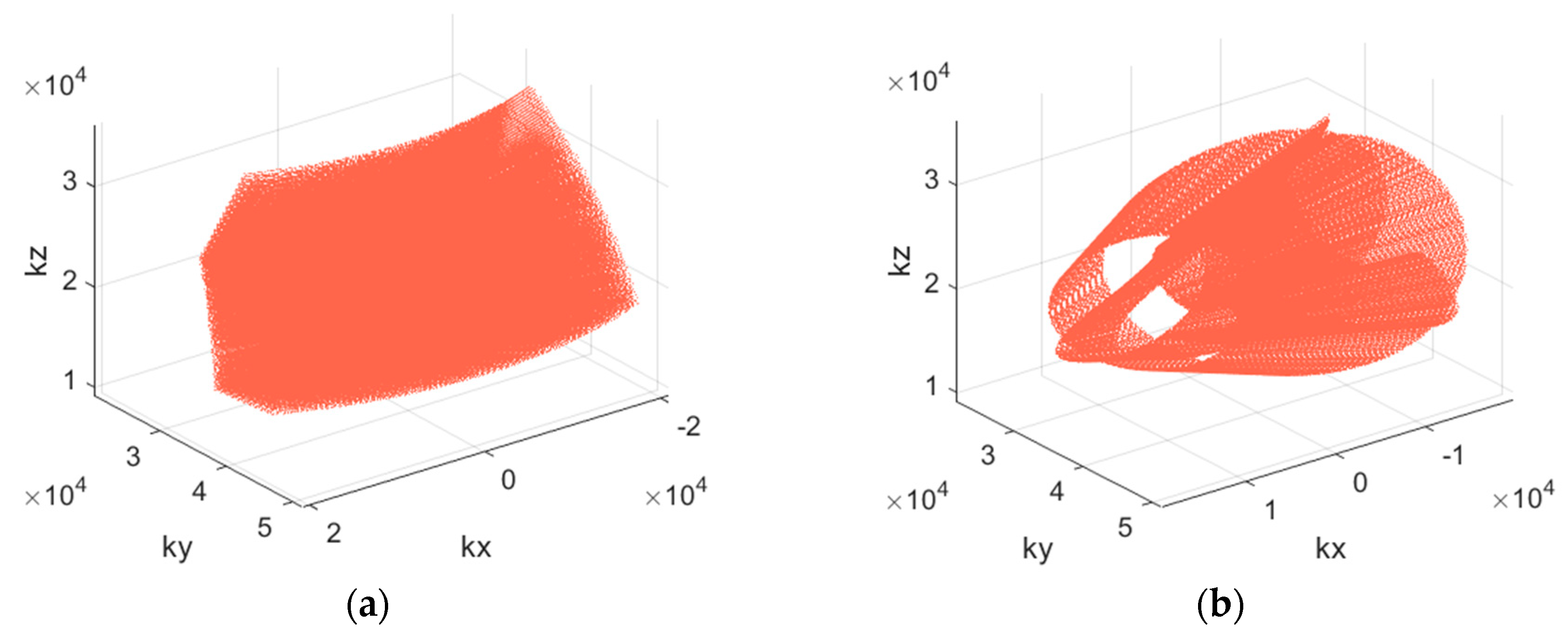
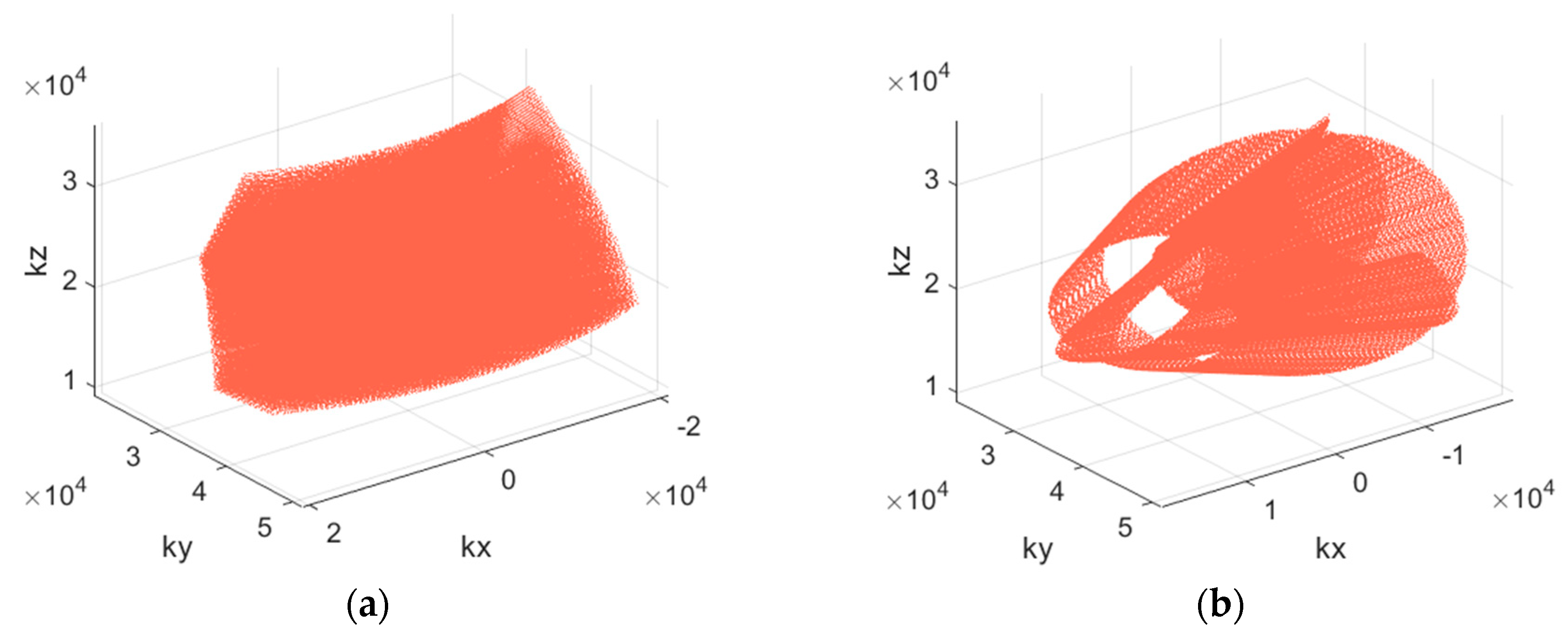
4. 3-D Wide-Angle SAR Imaging with Non-Uniform Sampling
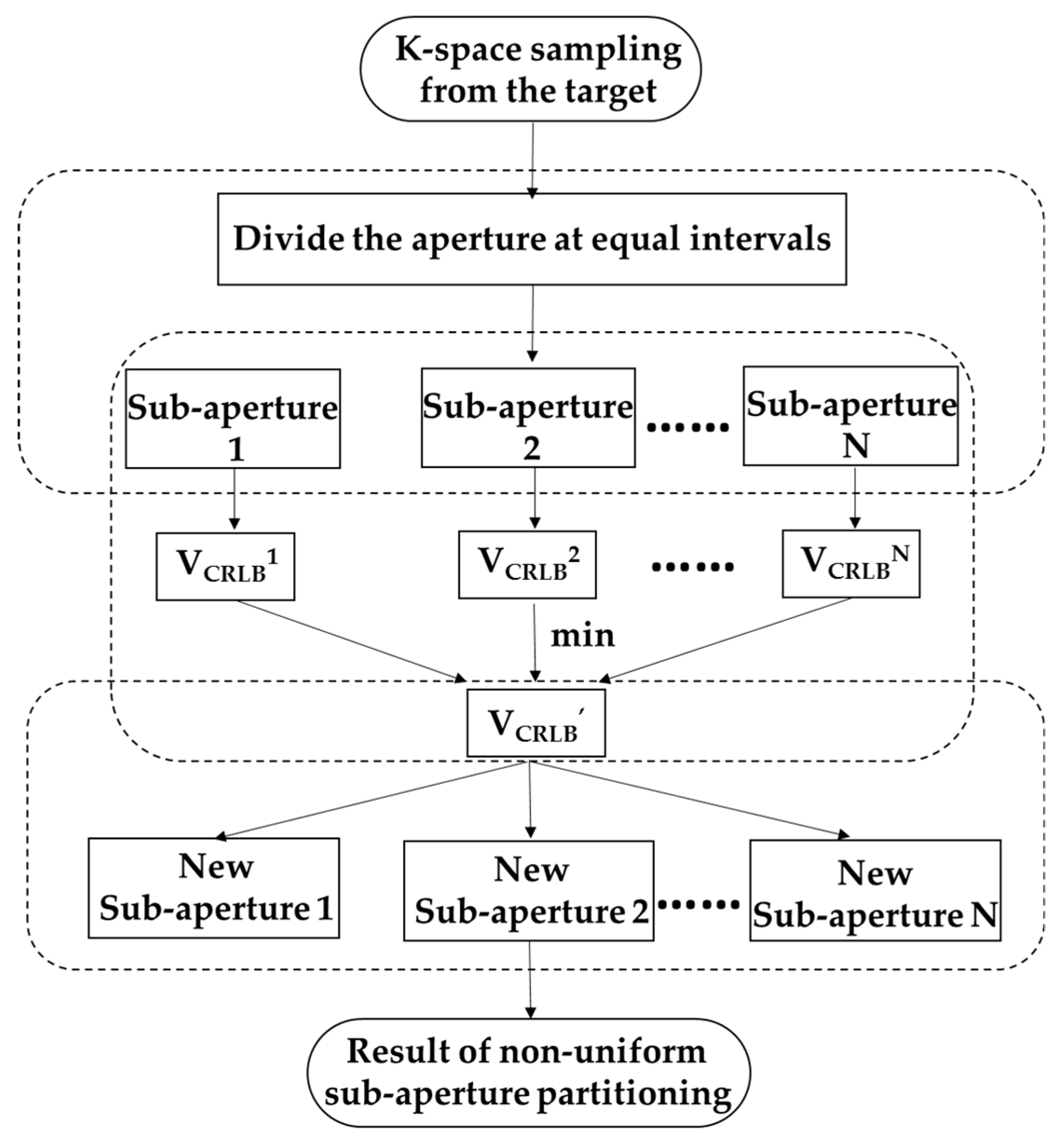
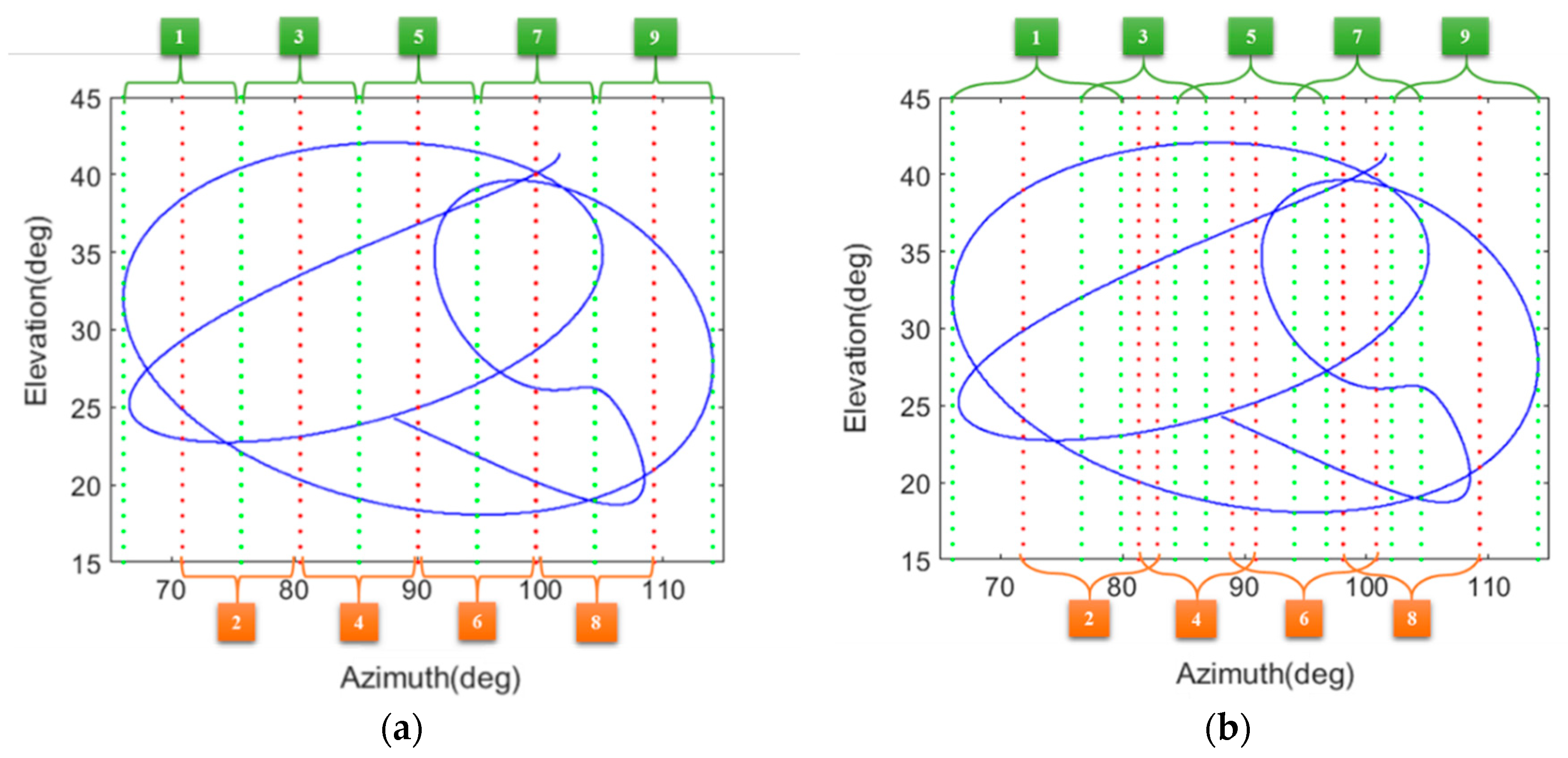
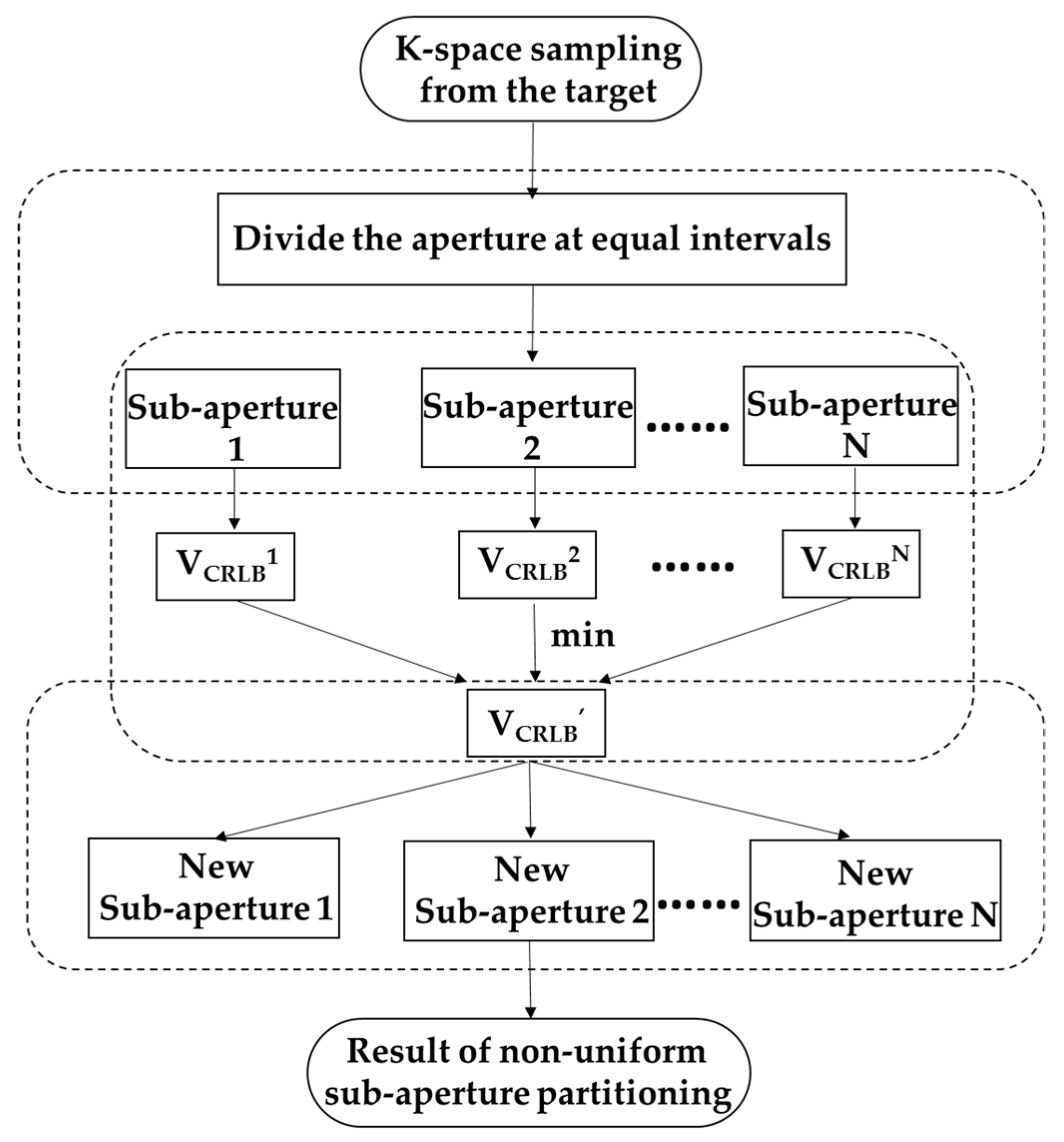
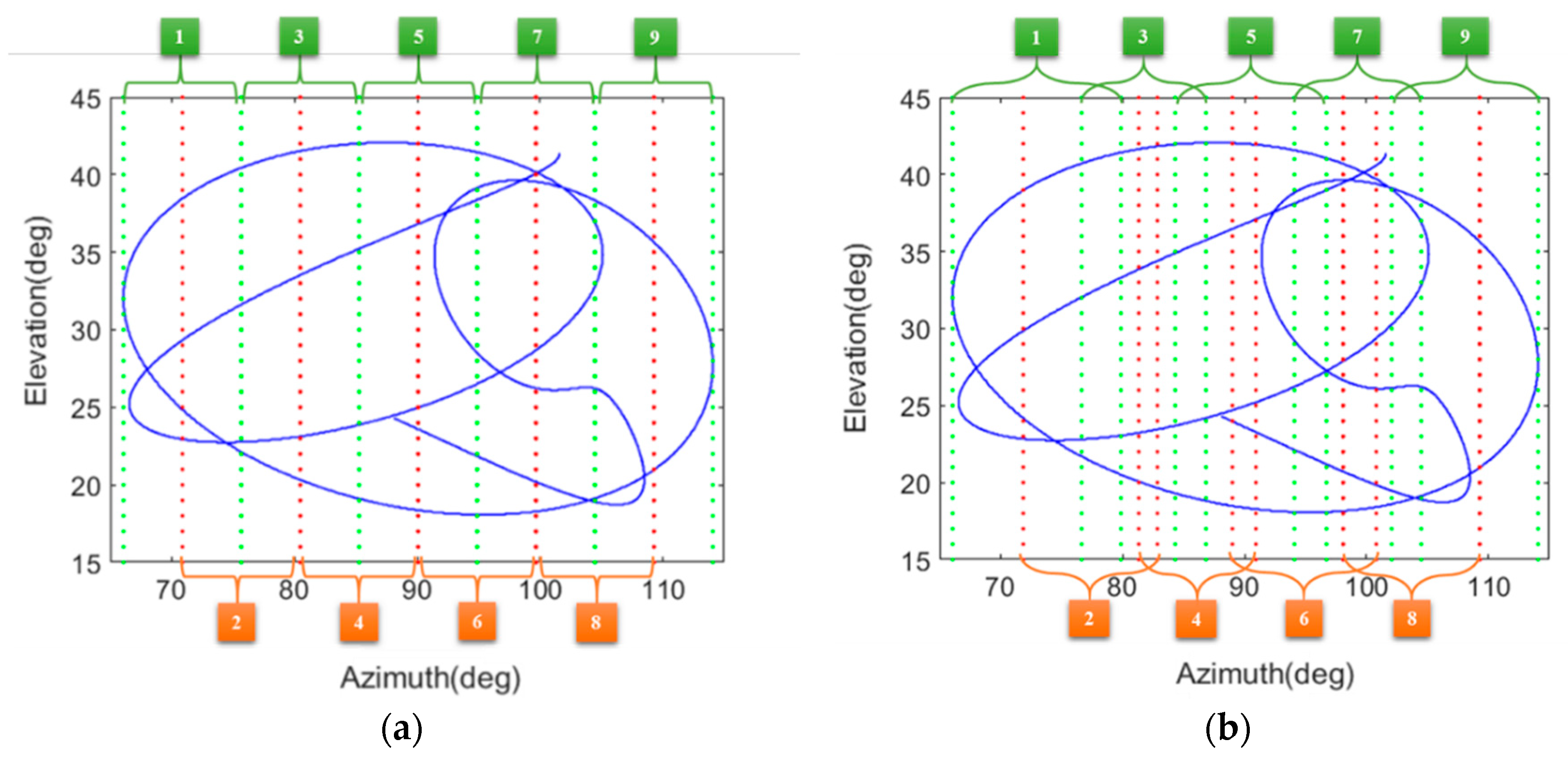
5. Non-Uniform Sub-Aperture Partitioning Method
6. Experiments and Results
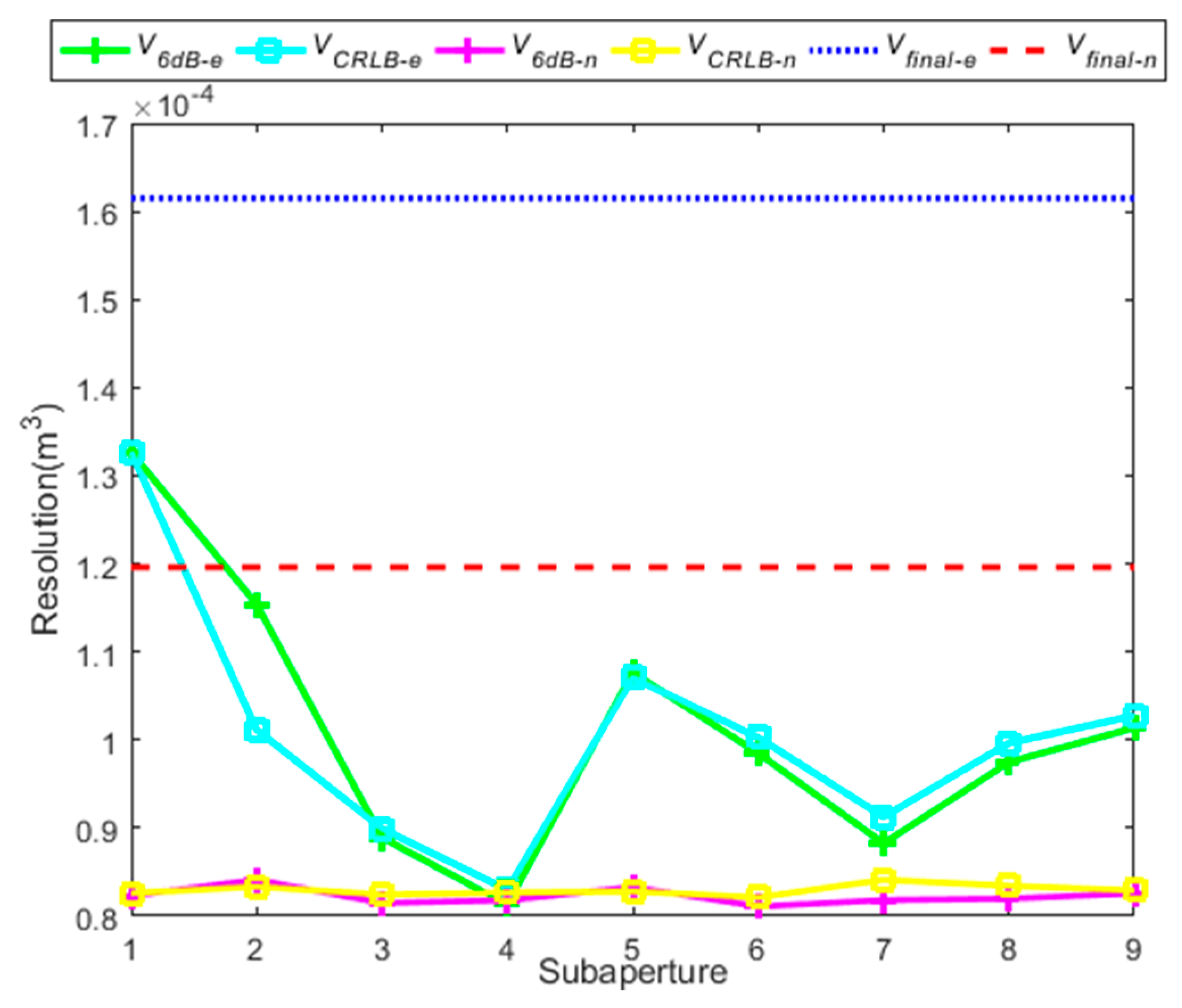
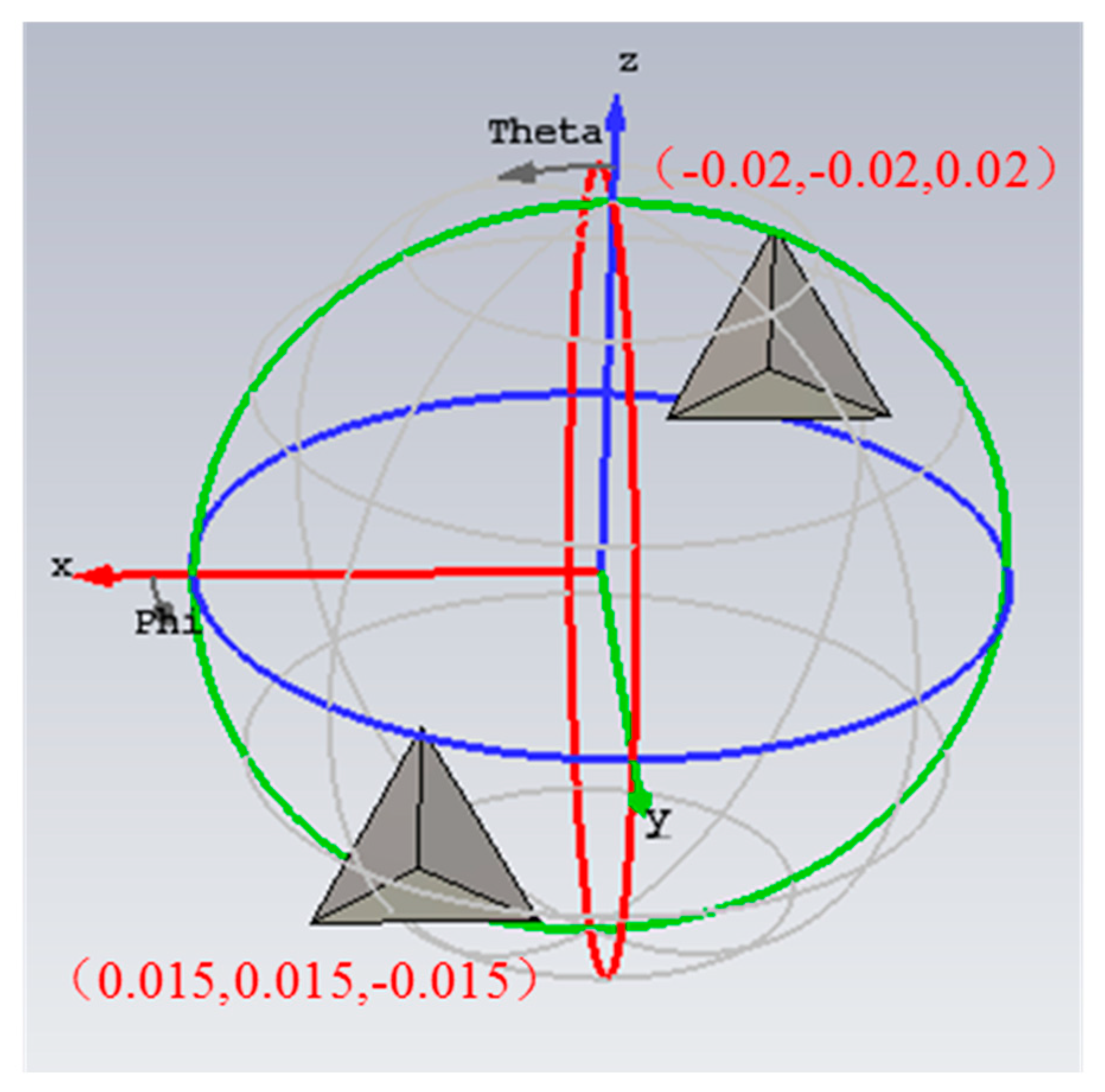
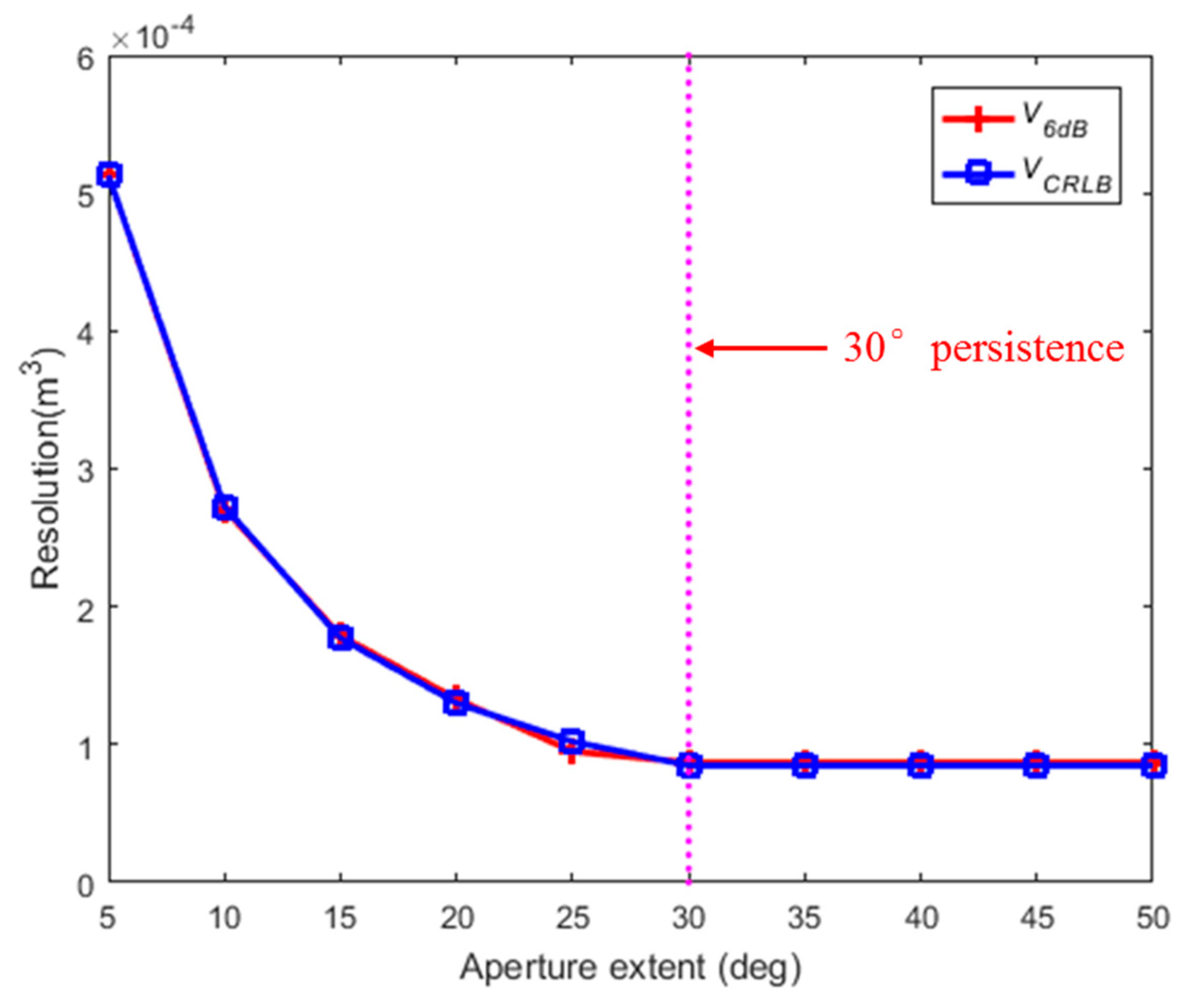
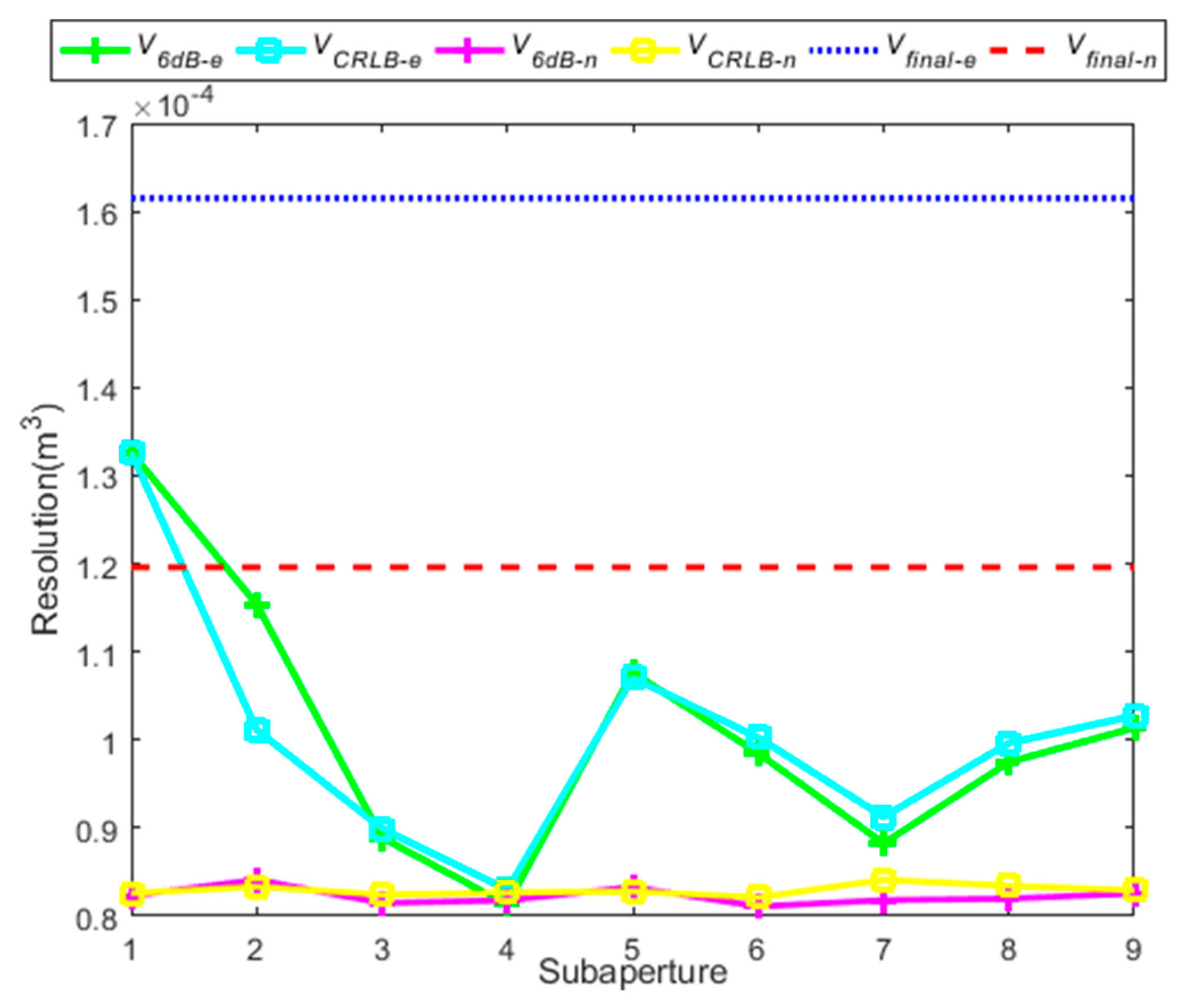
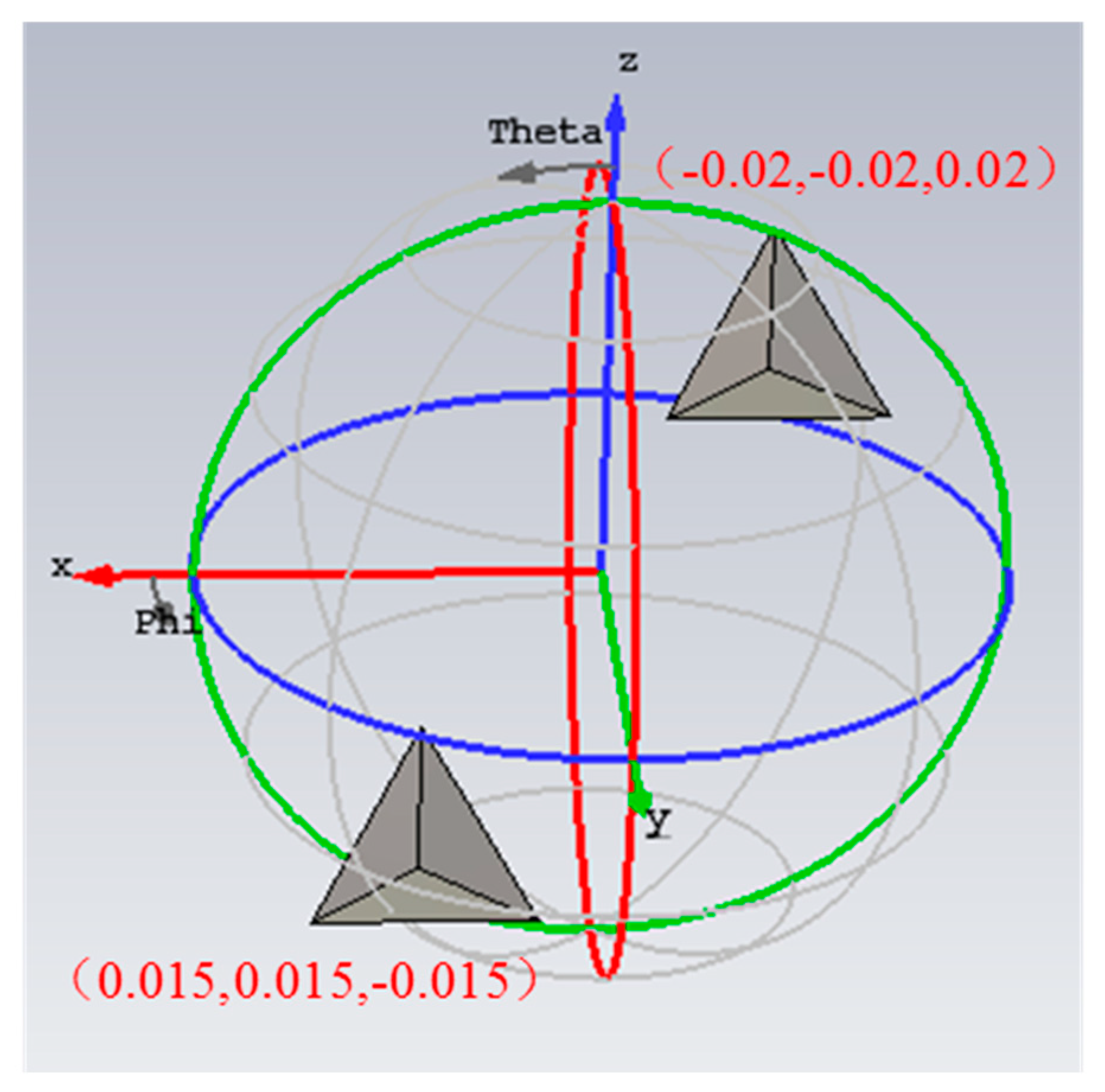
6.1. Estimation of the 3-D Resolution
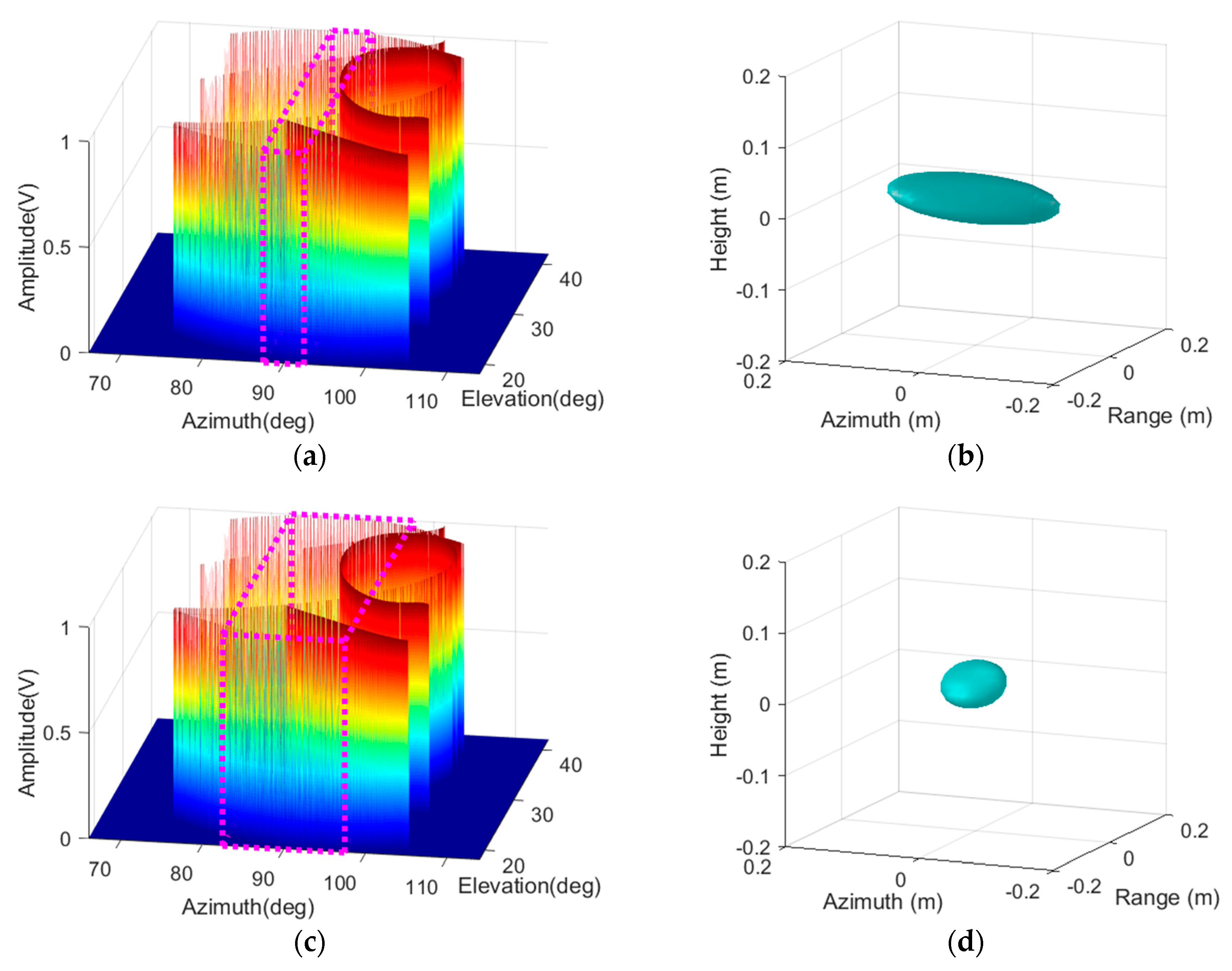
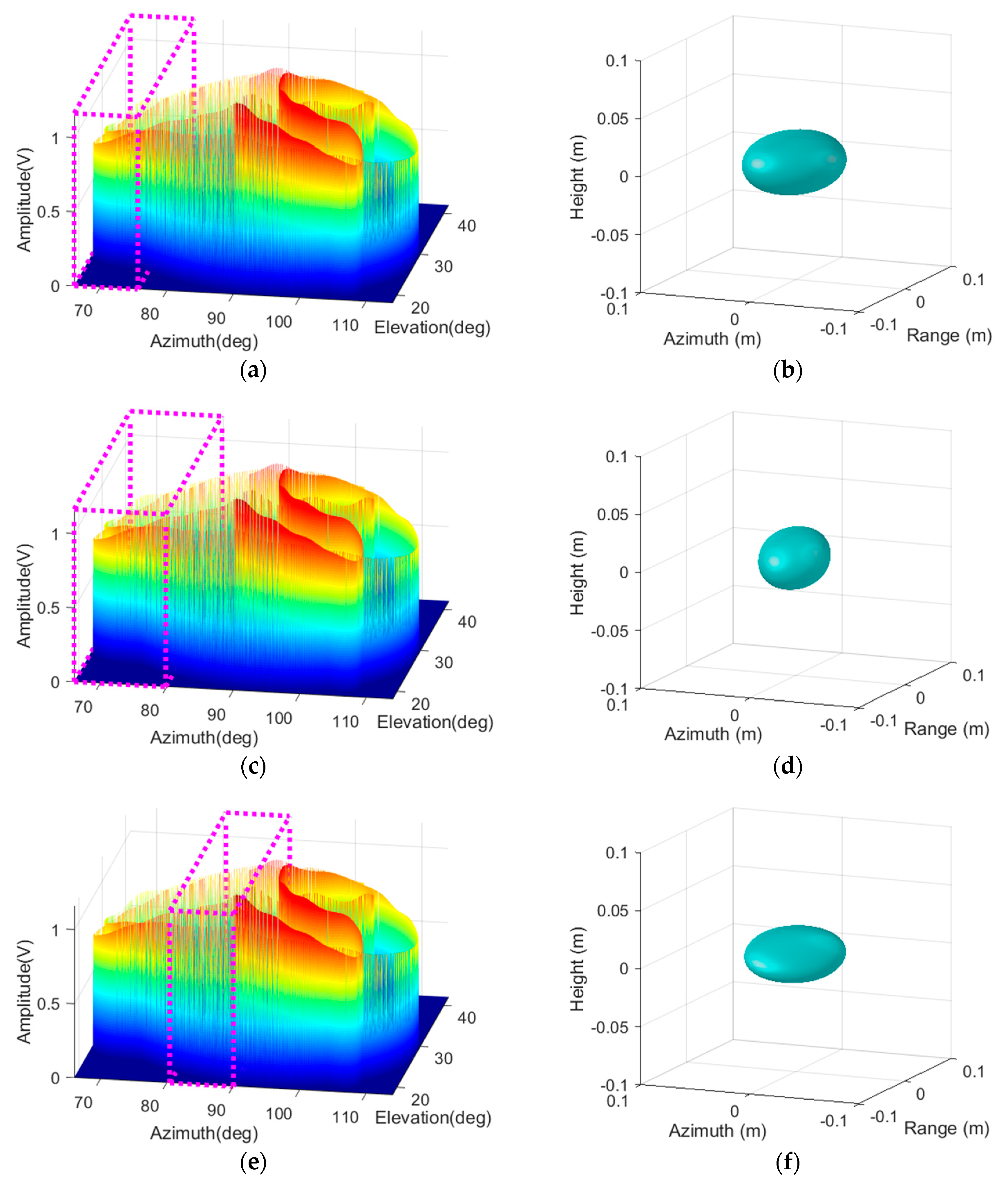
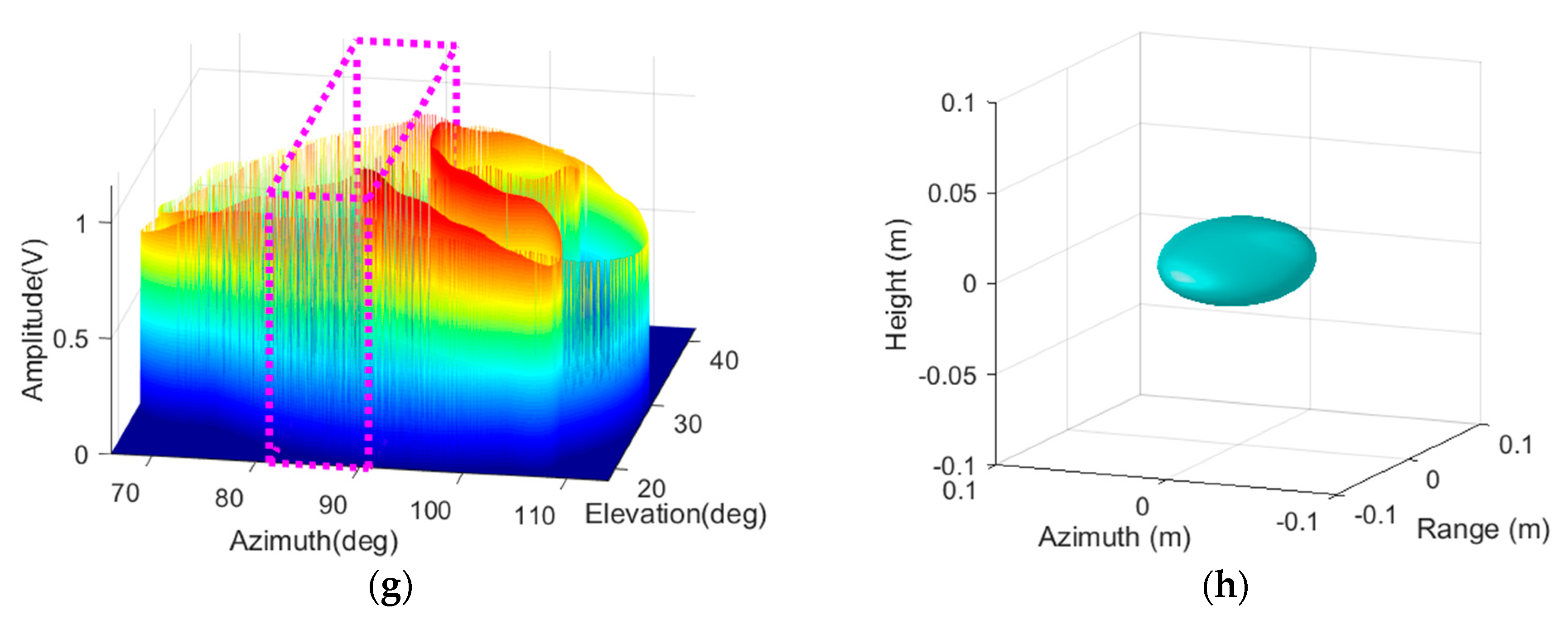
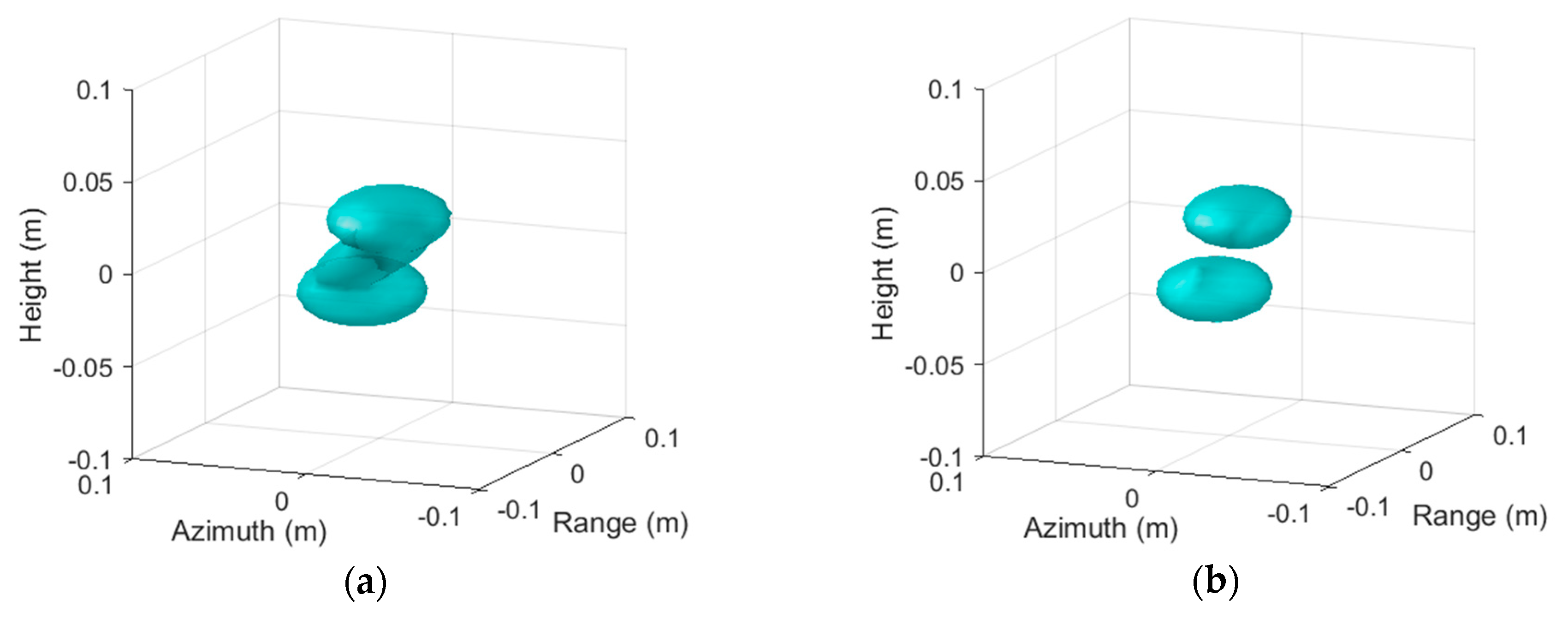
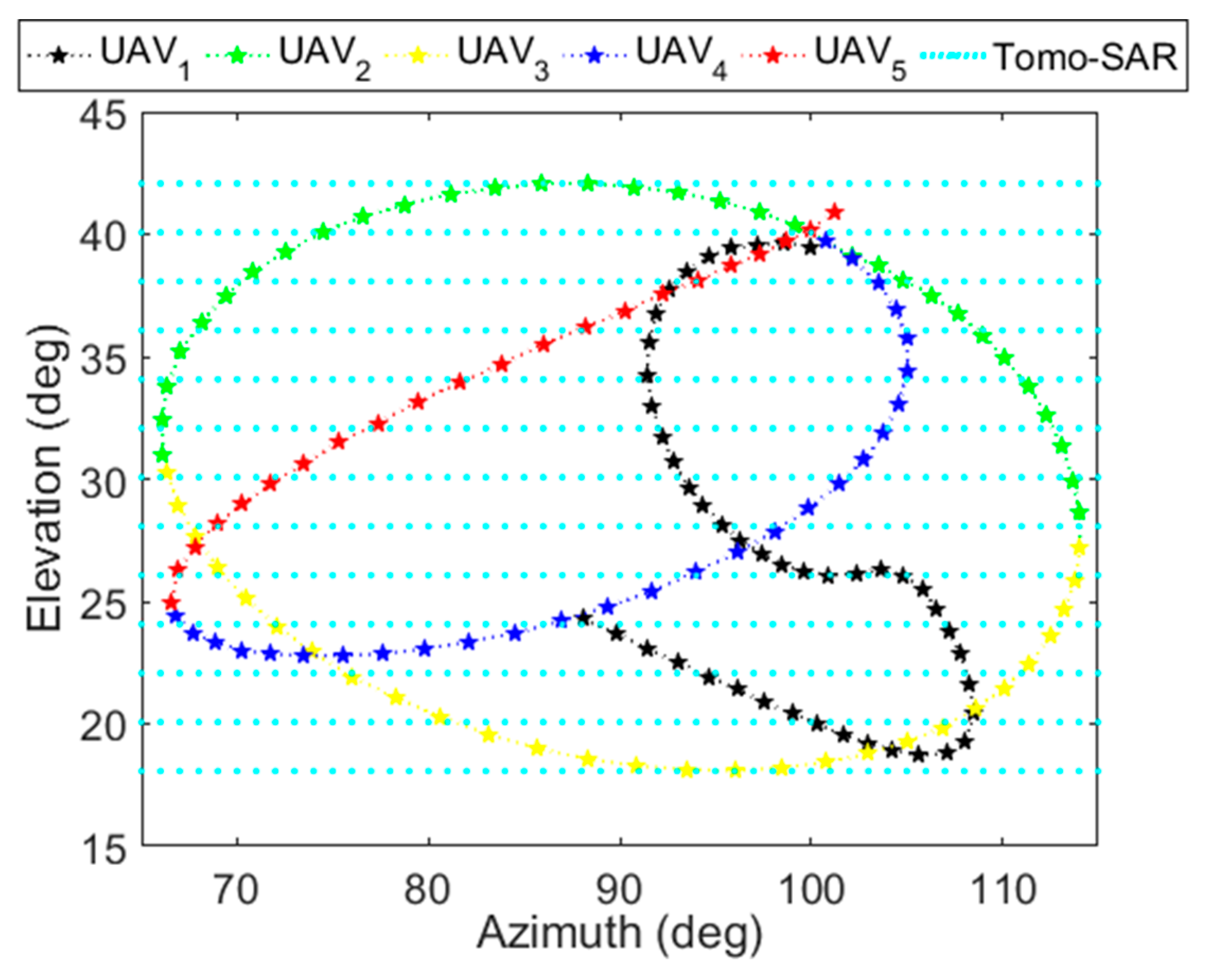
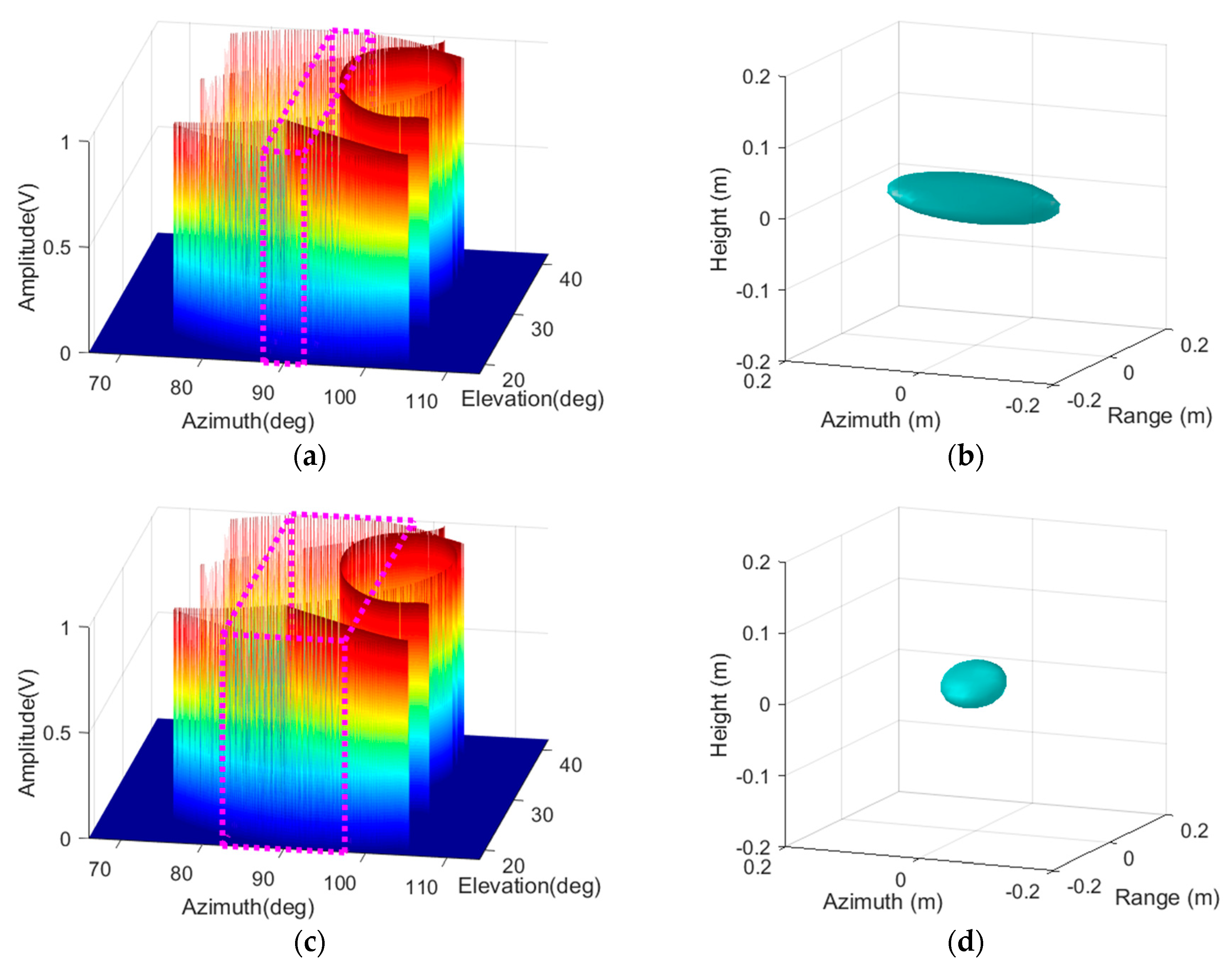
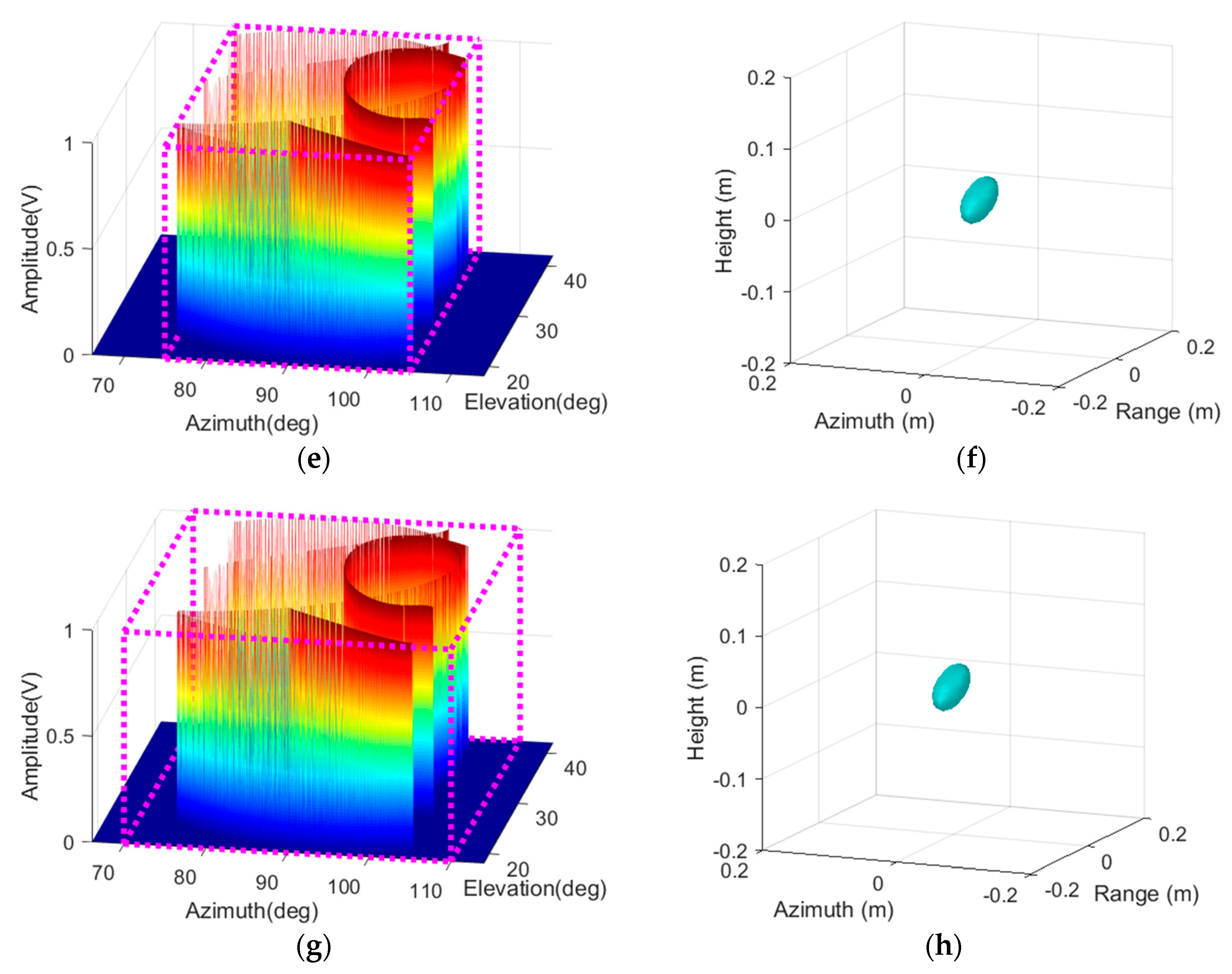
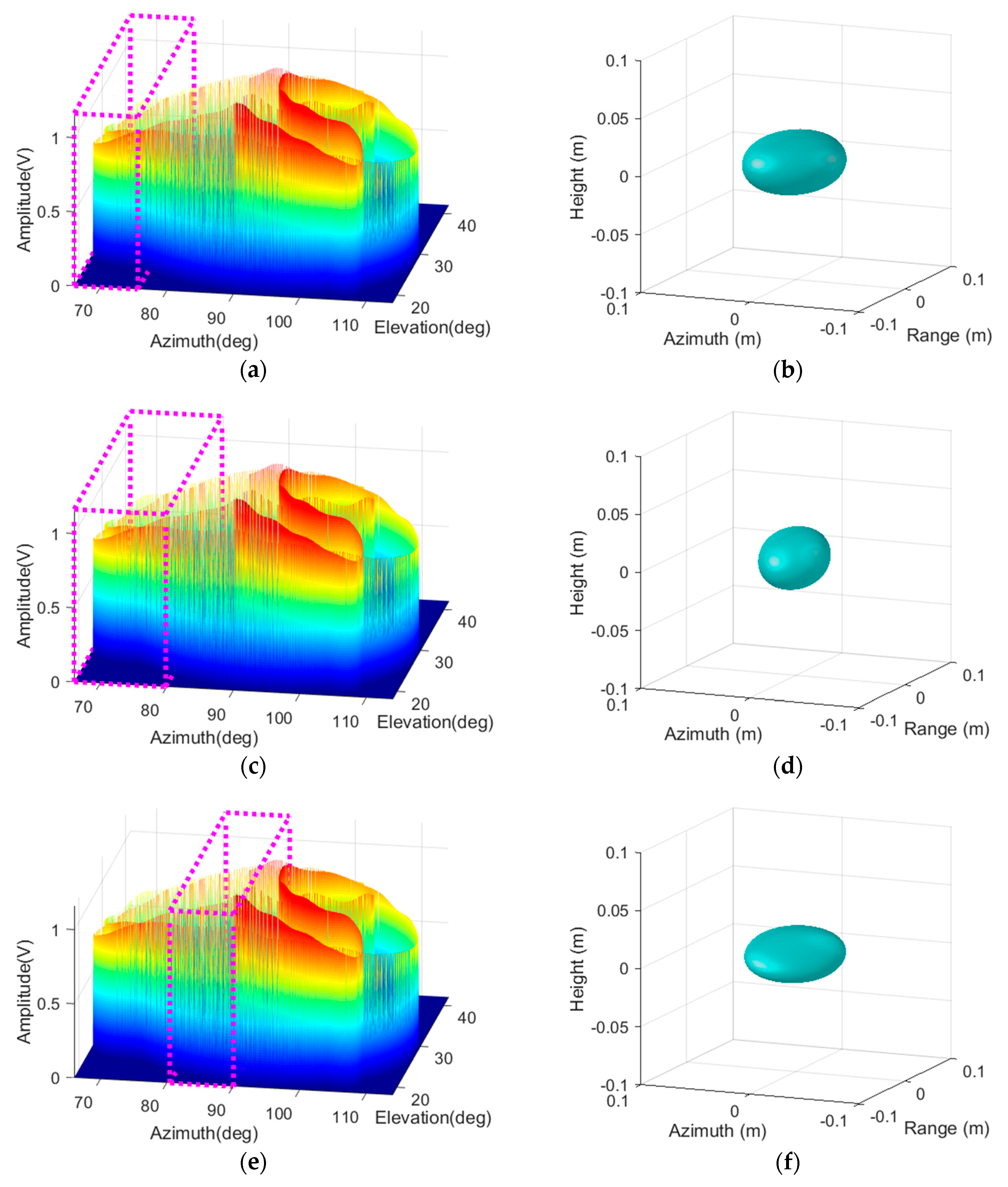
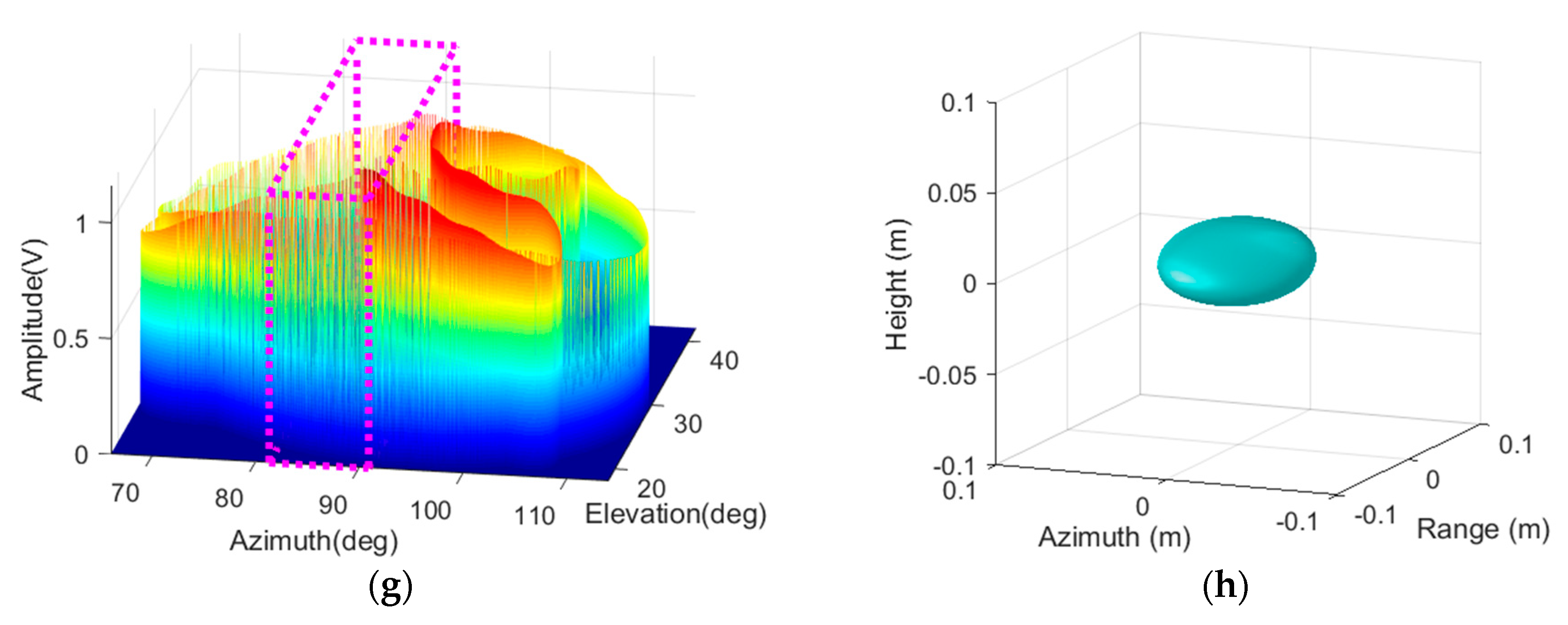
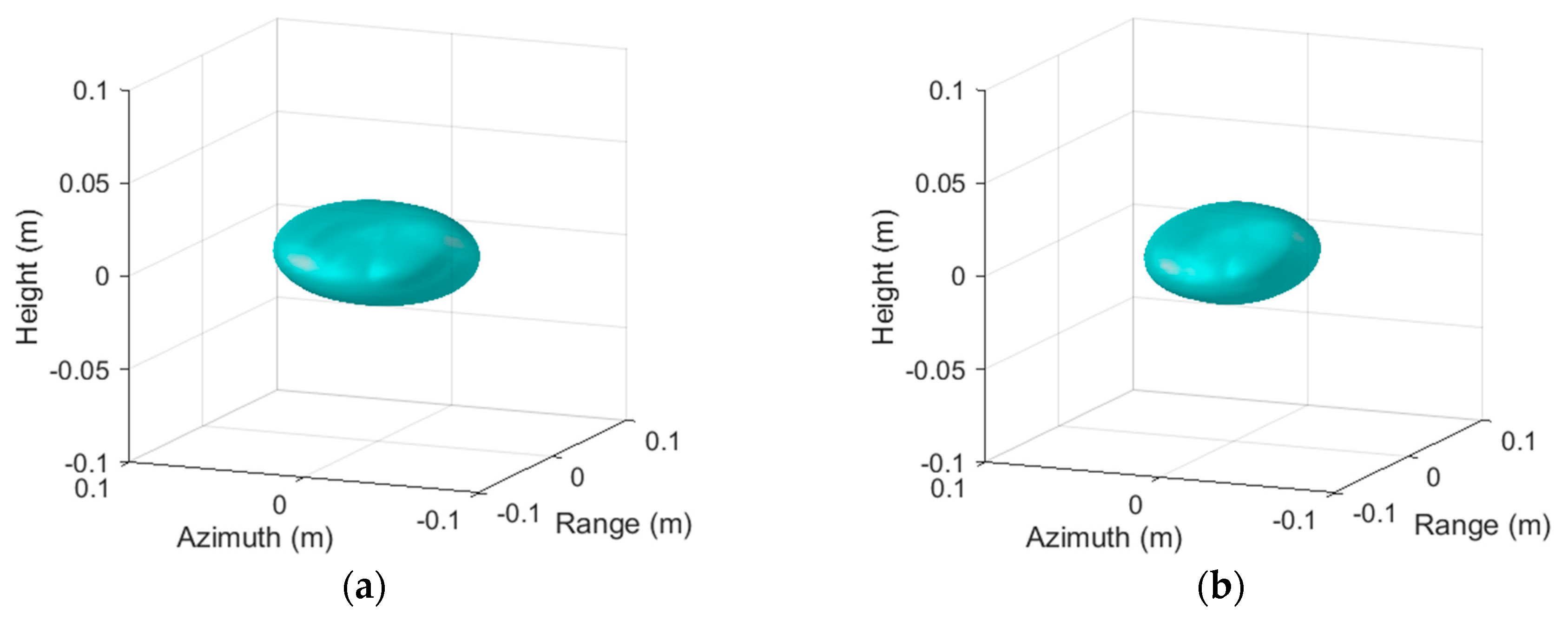
6.2. Performance of the Proposed Sub-Aperture Partitioning Method
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Xu, F.; Jin, Y.Q.; Moreira, A. A Preliminary Study on SAR Advanced Information Retrieval and Scene Reconstruction. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1443–1447. [Google Scholar] [CrossRef]
- CongHui, M.; GongJian, W.; XiaoHong, H.; XiaoLiang, Y.; BaiYuan, D. Scatterer-based approach to evaluate similarity between 3D em-model and 2D SAR data for ATR. IET Radar Sonar Navig. 2016, 11, 254–259. [Google Scholar] [CrossRef]
- Song, H.; Ji, K.; Zhang, Y.; Xing, X.; Zou, H. Sparse Representation-Based SAR Image Target Classification on the 10-Class MSTAR Data Set. Appl. Sci. 2016, 6, 26. [Google Scholar] [CrossRef]
- Reigber, A.; Lombardini, F.; Viviani, F.; Nannini, M.; Martinez Del Hoyo, A. Three-dimensional and higher-order imaging with tomographic SAR: Techniques, applications, issues. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015. [Google Scholar]
- Wang, X.; Xu, F.; Jin, Y.Q. The Iterative Reweighted Alternating Direction Method of Multipliers for Separating Structural Layovers in SAR Tomography. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1883–1887. [Google Scholar] [CrossRef]
- Ponce, O.; Prats-Iraola, P.; Pinheiro, M.; Rodriguez-Cassola, M.; Scheiber, R.; Reigber, A.; Moreira, A. Fully polarimetric high-resolution 3-D imaging with circular SAR at L-band. IEEE Trans. Geosci. Remote Sens. 2014, 52, 3074–3090. [Google Scholar] [CrossRef]
- Varshney, K.R.; Çetin, M.; Fisher III, J.W.; Willsky, A.S. Joint image formation and anisotropy characterization in wide-angle SAR. Algorithms Synth. Aperture Radar Imag. XIII 2006, 6237, 62370D. [Google Scholar]
- Gao, Y.; Xing, M. A method for extracting amplitude attribute of scattering centers in SAR. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 2665–2668. [Google Scholar]
- Austin, C.D.; Ertin, E.; Moses, R.L. Sparse signal methods for 3-D radar imaging. IEEE J. Sel. Top. Signal Process. 2011, 5, 408–423. [Google Scholar] [CrossRef]
- Liu, D.; Boufounos, P.T. Compressive sensing based 3D SAR imaging with multi-PRF baselines. In Proceedings of the IEEE Geoscience and Remote Sensing Symposium, Quebec City, QC, Canada, 13–18 July 2014; pp. 1301–1304. [Google Scholar]
- Frey, O.; Magnard, C.; Rüegg, M.; Meier, E. Focusing of airborne synthetic aperture radar data from highly nonlinear flight tracks. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1844–1858. [Google Scholar] [CrossRef]
- Axelsson, S.R.J. Beam characteristics of three-dimensional SAR in curved or random paths. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2324–2334. [Google Scholar] [CrossRef]
- Zhang, S.; Zhu, Y.; Dong, G. Gangyao Kuang Truncated SVD-Based Compressive Sensing for Downward-Looking Three-Dimensional SAR Imaging With Uniform/Nonuniform Linear Array. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1853–1857. [Google Scholar] [CrossRef]
- Aguasca, A.; Acevo-Herrera, R.; Broquetas, A.; Mallorqui, J.J.; Fabregas, X. ARBRES: Light-weight CW/FM SAR sensors for small UAVs. Sensors 2013, 13, 3204–3216. [Google Scholar] [CrossRef] [PubMed]
- Lort, M.; Aguasca, A.; López-Martínez, C.; Marín, T.M. Initial evaluation of SAR capabilities in UAV multicopter platforms. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 127–140. [Google Scholar] [CrossRef]
- Li, J.; Chen, J.; Wang, P.; Li, C. Sensor-oriented path planning for multiregion surveillance with a single lightweight UAV SAR. Sensors 2018, 18, 548. [Google Scholar] [CrossRef]
- Ash, J.; Ertin, E.; Potter, L.C.; Zelnio, E. Wide-angle synthetic aperture radar imaging: Models and algorithms for anisotropic scattering. IEEE Signal Process. Mag. 2014, 31, 16–26. [Google Scholar] [CrossRef]
- Jackson, J.A.; Rigling, B.D.; Moses, R.L. Canonical scattering feature models for 3D and bistatic SAR. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 525–541. [Google Scholar] [CrossRef]
- Stojanovic, I.; Cetin, M.; Karl, W.C. Joint space aspect reconstruction of wide-angle SAR exploiting sparsity. Algorithms Synth. Aperture Radar Imag. XV 2008, 6970, 697005. [Google Scholar]
- Sun, C.; Wang, B.; Fang, Y.; Song, Z.; Wang, S. Multichannel and wide-angle SAR imaging based on compressed sensing. Sensors 2017, 17, 295. [Google Scholar] [CrossRef]
- Xue, F.; Lin, Y.; Hong, W.; Yin, Q.; Zhang, B.; Shen, W.; Zhao, Y. Analysis of azimuthal variations using multi-aperture polarimetric entropy with circular SAR images. Remote Sens. 2018, 10, 123. [Google Scholar] [CrossRef]
- Moore, L.; Potter, L.; Ash, J. Three-dimensional position accuracy in circular synthetic aperture radar. IEEE Aerosp. Electron. Syst. Mag. 2014, 29, 29–40. [Google Scholar] [CrossRef]
- Sengijpta, S.K. Fundamentals of Statistical Signal Processing: Estimation Theory. Technometrics 1995, 37, 465–466. [Google Scholar] [CrossRef]
- Parker, J.T.; Moore, L.J.; Potter, L.C. Resolution and Sidelobe Structure Analysis for RF Tomography. In Proceedings of the IEEE RadarCon (RADAR), Kansas City, MO, USA, 23–27 May 2011; pp. 1080–1085. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Non-Uniform Sub-Aperture Partitioning Method |
|---|
|
|
|
|
|
|
|
|
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, D.; Xing, S.; Li, Y.; Pang, B.; Wang, X. Sub-Aperture Partitioning Method for Three-Dimensional Wide-Angle Synthetic Aperture Radar Imaging with Non-Uniform Sampling. Electronics 2019, 8, 629. https://doi.org/10.3390/electronics8060629
Sun D, Xing S, Li Y, Pang B, Wang X. Sub-Aperture Partitioning Method for Three-Dimensional Wide-Angle Synthetic Aperture Radar Imaging with Non-Uniform Sampling. Electronics. 2019; 8(6):629. https://doi.org/10.3390/electronics8060629
Chicago/Turabian StyleSun, Dou, Shiqi Xing, Yongzhen Li, Bo Pang, and Xuesong Wang. 2019. "Sub-Aperture Partitioning Method for Three-Dimensional Wide-Angle Synthetic Aperture Radar Imaging with Non-Uniform Sampling" Electronics 8, no. 6: 629. https://doi.org/10.3390/electronics8060629
APA StyleSun, D., Xing, S., Li, Y., Pang, B., & Wang, X. (2019). Sub-Aperture Partitioning Method for Three-Dimensional Wide-Angle Synthetic Aperture Radar Imaging with Non-Uniform Sampling. Electronics, 8(6), 629. https://doi.org/10.3390/electronics8060629