Model Predictive Current Control Method with Improved Performances for Three-Phase Voltage Source Inverters


Abstract
:1. Introduction
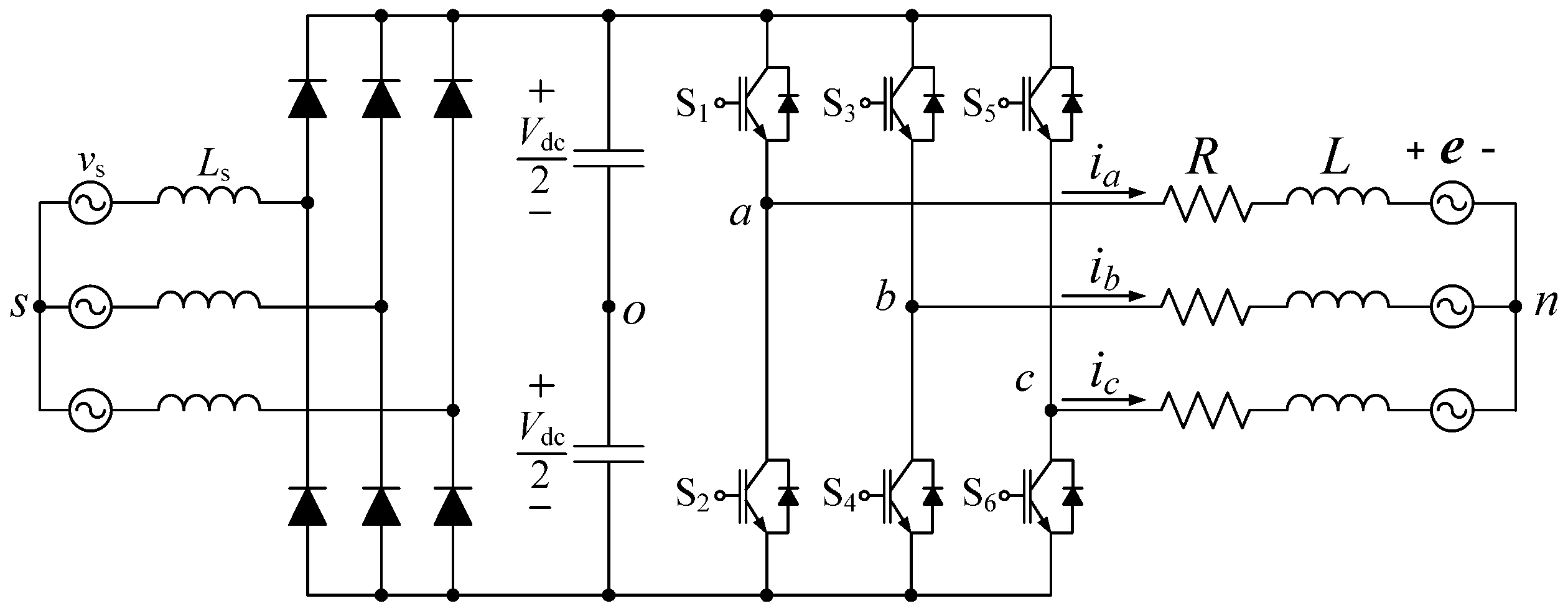
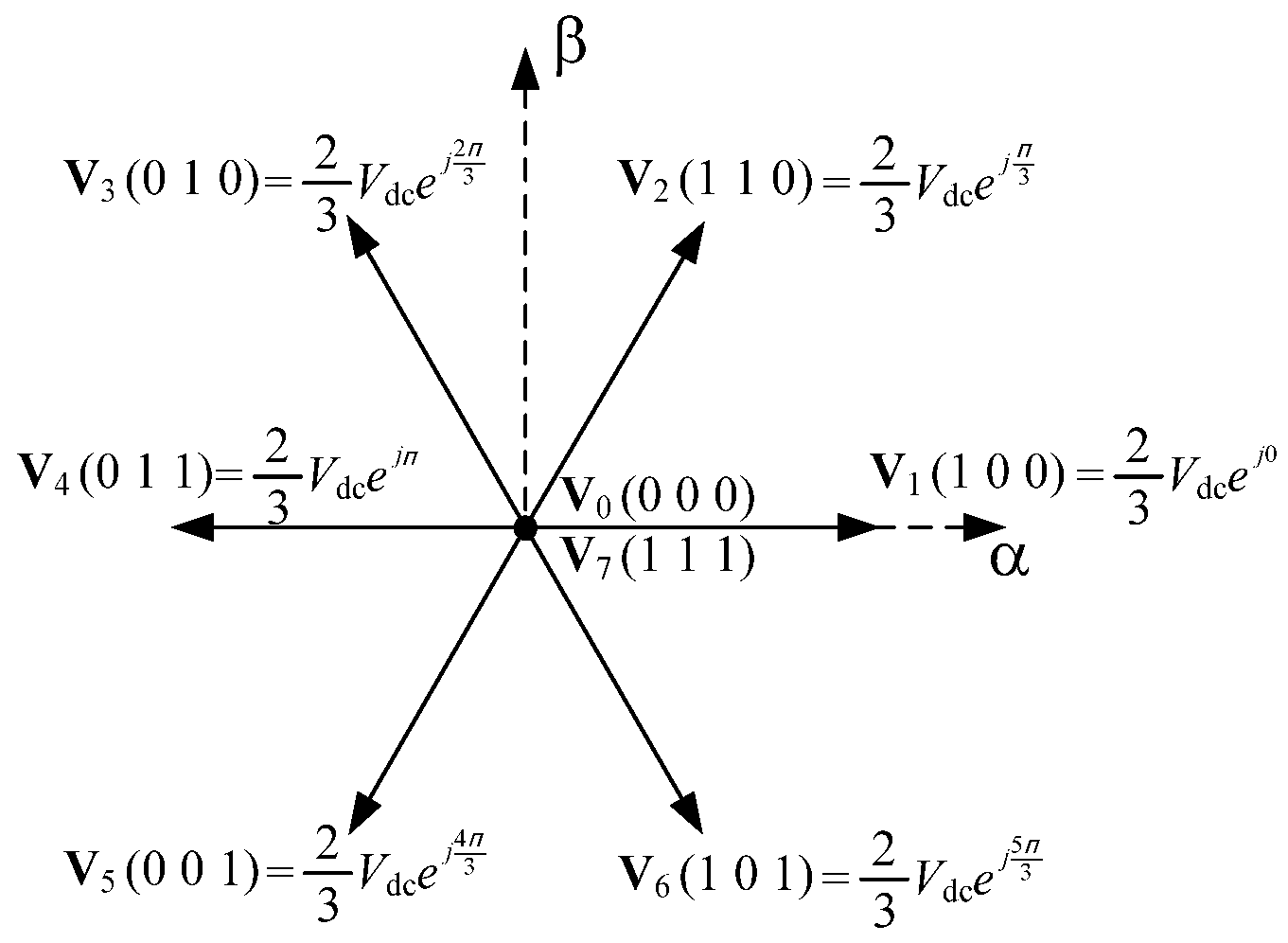
2. Conventional Model Predictive Current Control Method for VSIs
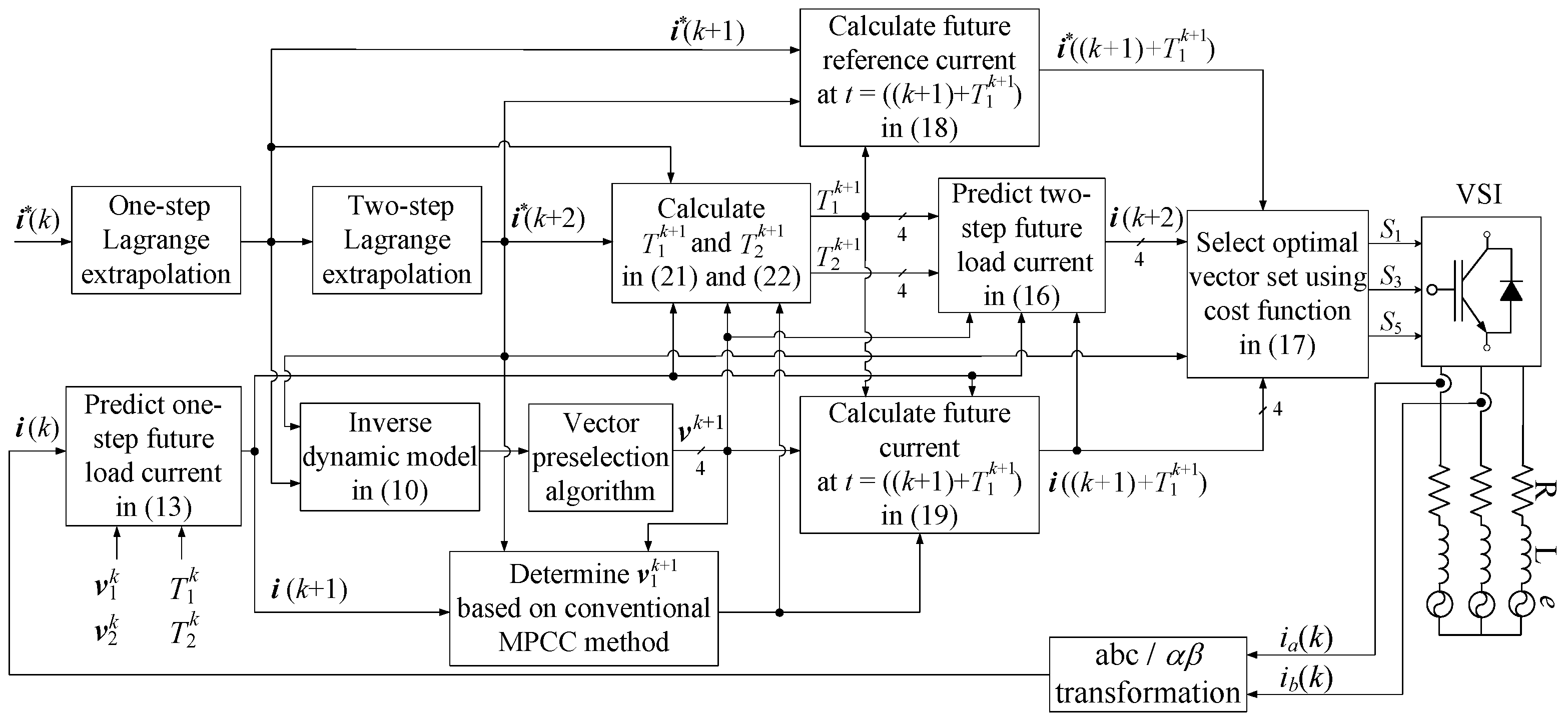
3. Proposed Model Predictive Current Control Method to Improve Performance in Terms of Efficiency and Current Harmonics
- ,
- ,
- ,
- ,
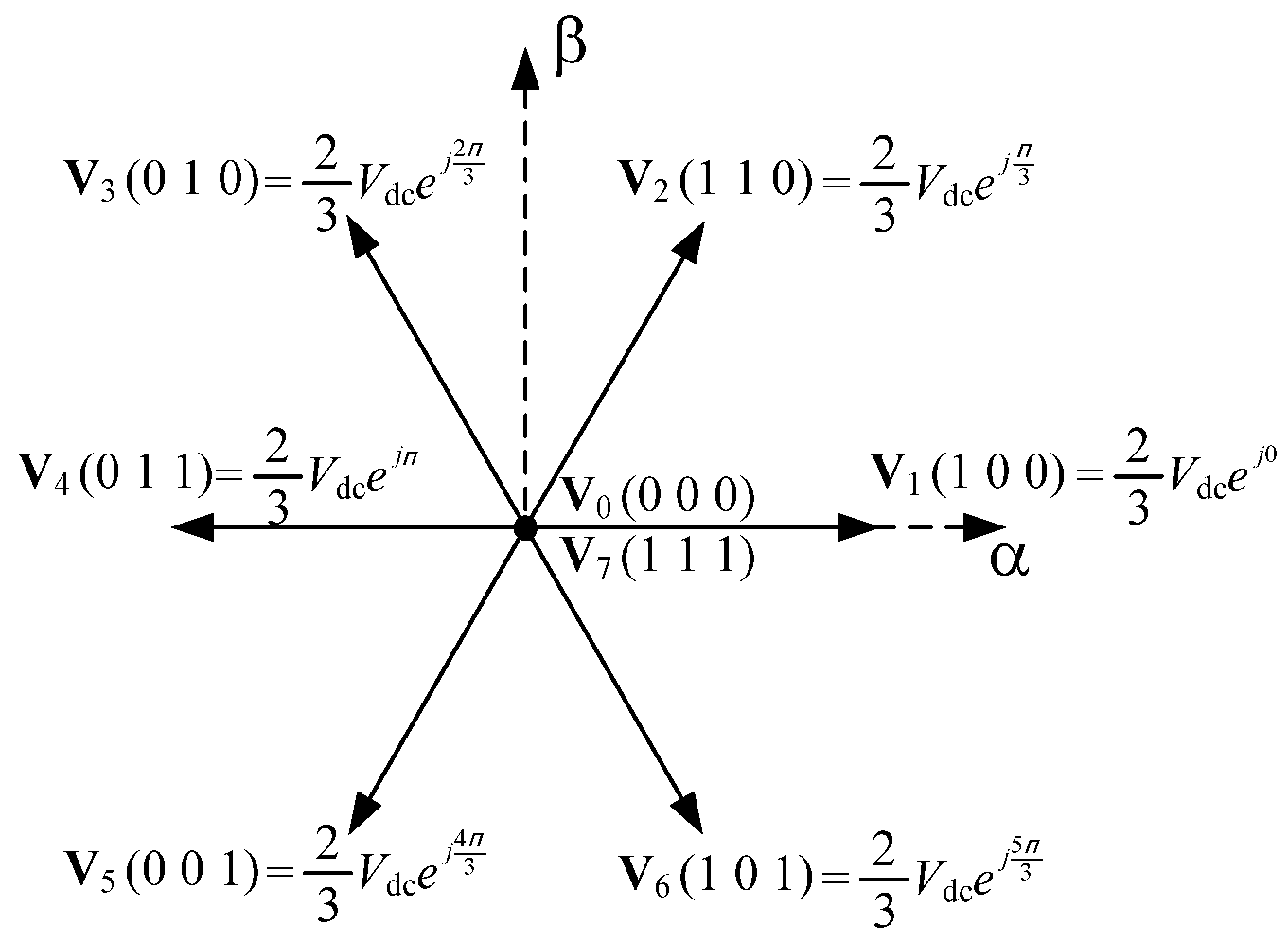
- and α, β.
- Measuring the output current at the kth instant.
- Predicting the output current at the (k + 1)th instant by using the two voltage vectors and during and , respectively, which were determined in the previous (k− 1)th interval.
- Calculating the reference currents and using (8).
- Obtaining the future voltage vector using the inverse dynamic model (10).
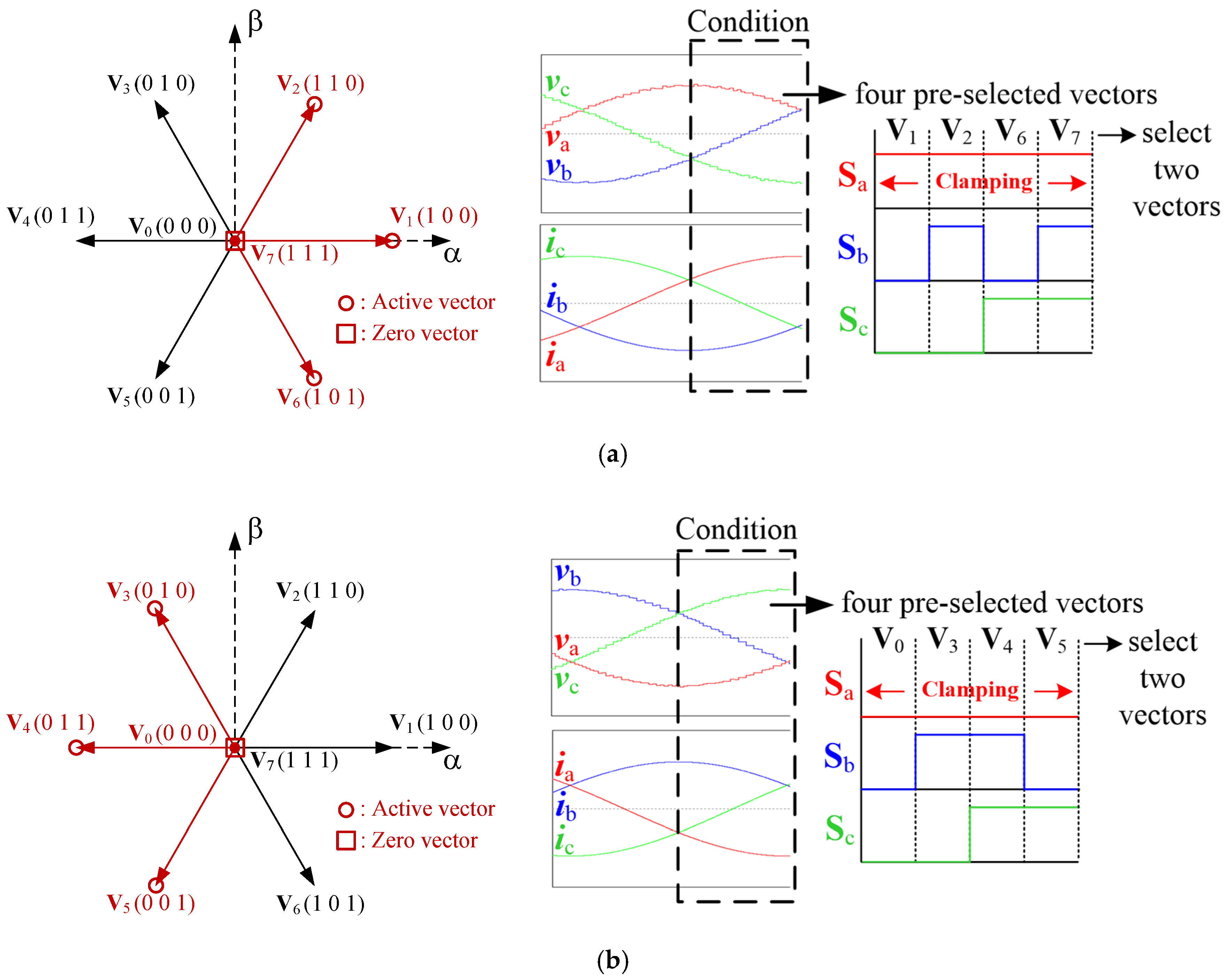
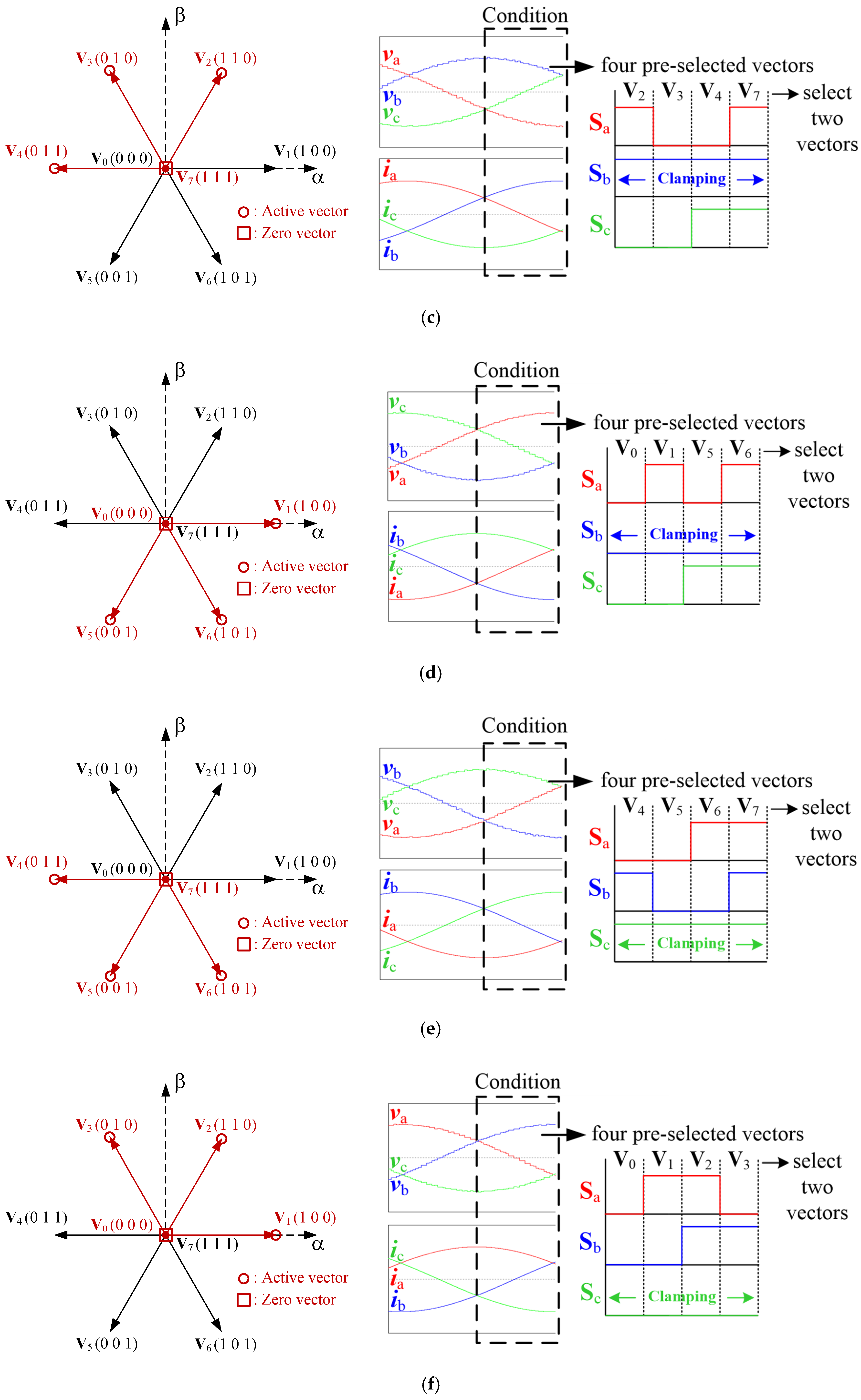
- Sorting the four voltage vectors reducing the switching losses by using the vector pre-selection method.
- Obtaining the initial vector by using the conventional MPCC method in the four vectors selected by the vector pre-selection method.
- Calculating the four optimal time durations and according to the initial and the second vector obtained by using the vector pre-selection method.
- Calculating the output currents and for the pre-selected voltage vectors and during and .
- Calculating the reference currents using (18).
- Evaluating the four voltage vector sets and corresponding durations by using the G in (17).
- Determining one optimal vector sets with and along with their optimal durations and .
- Storing , , , and for the next application at the (k + 1)th instant.
4. Results and Comparison
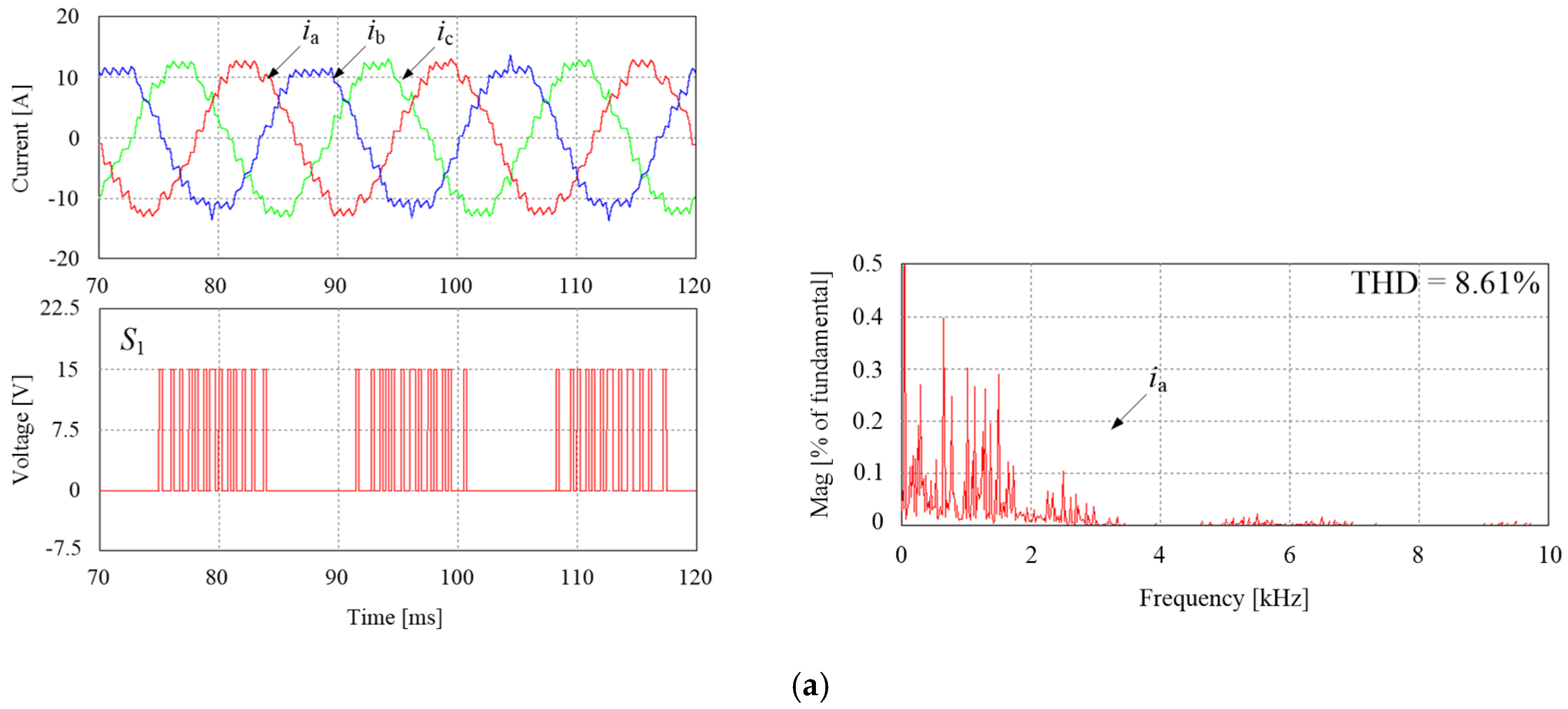
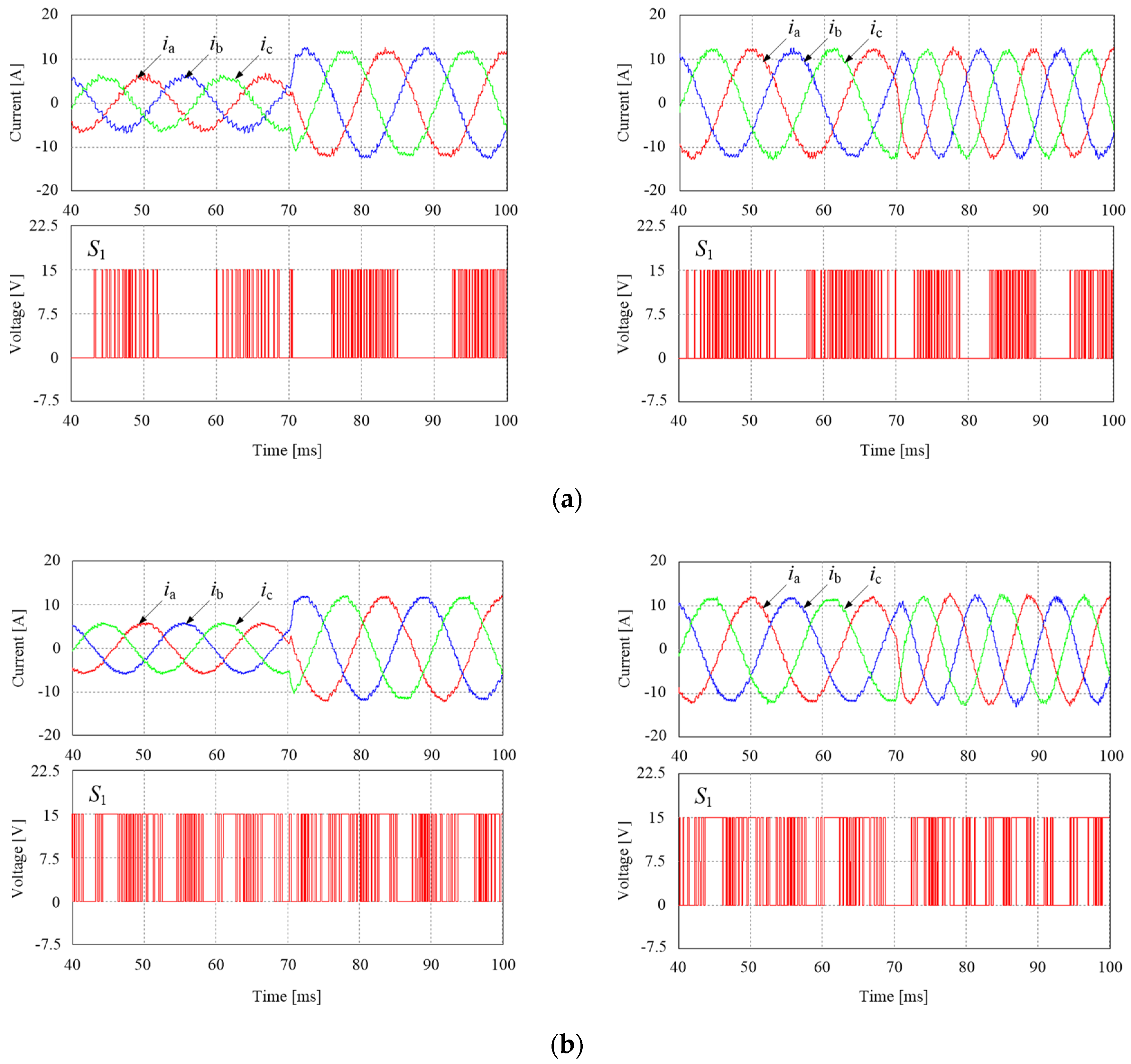
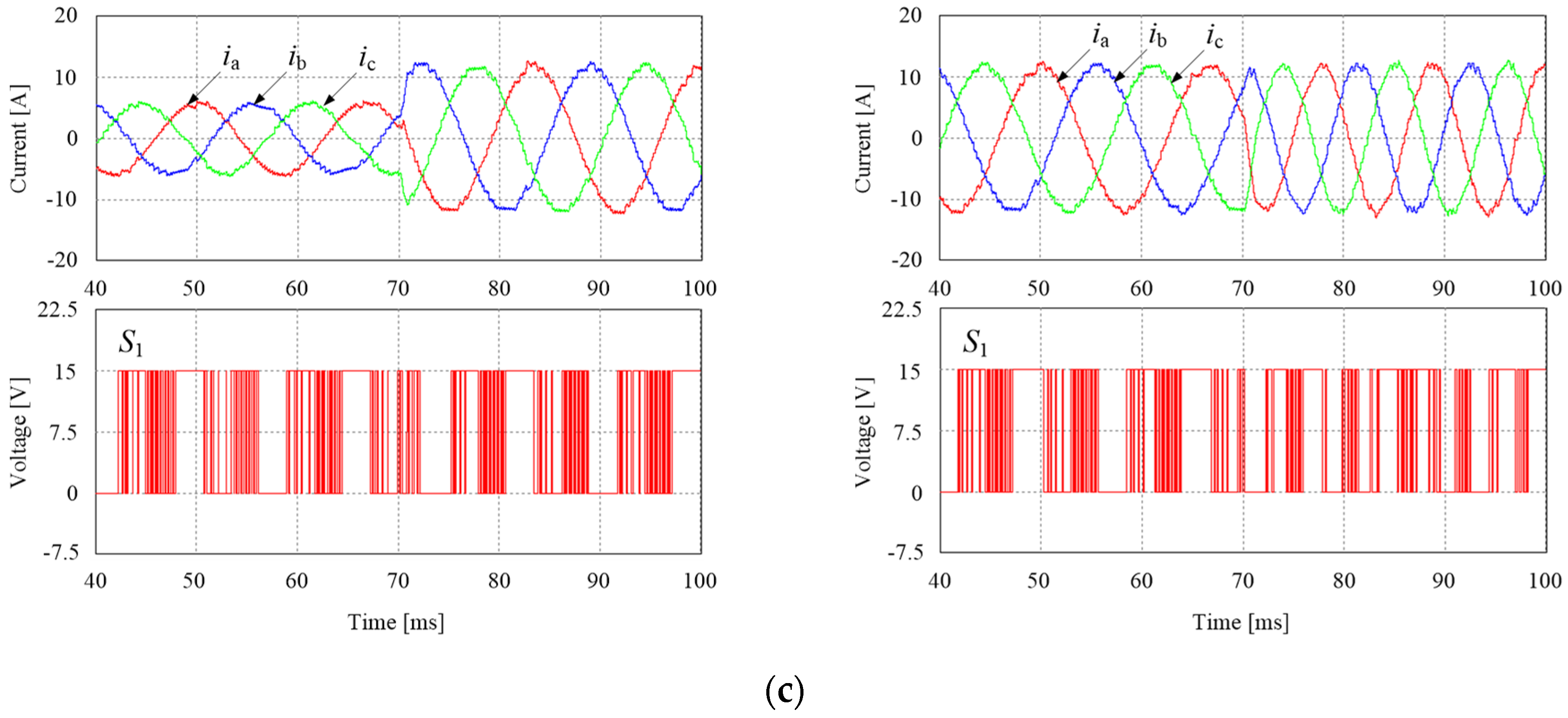
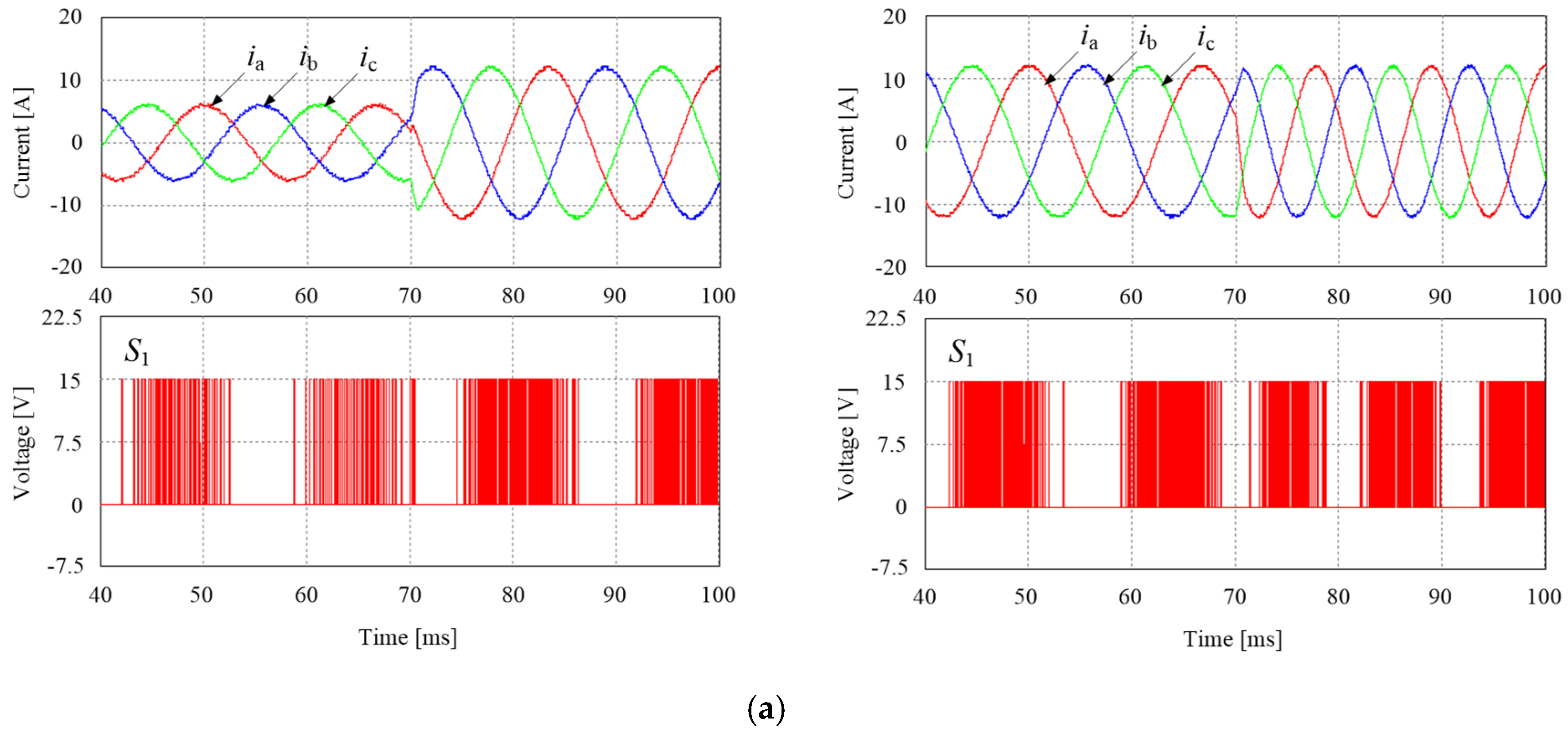
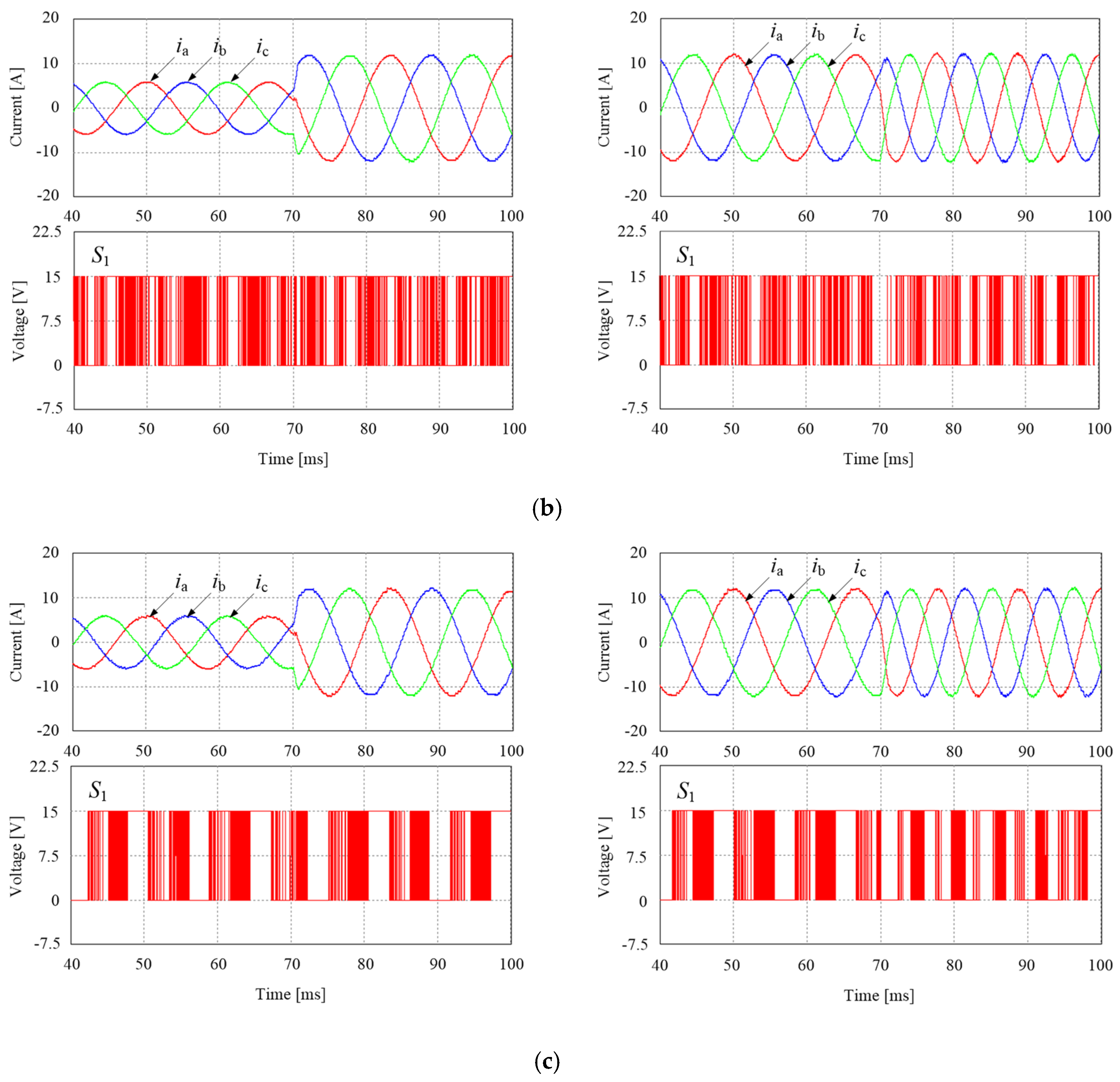
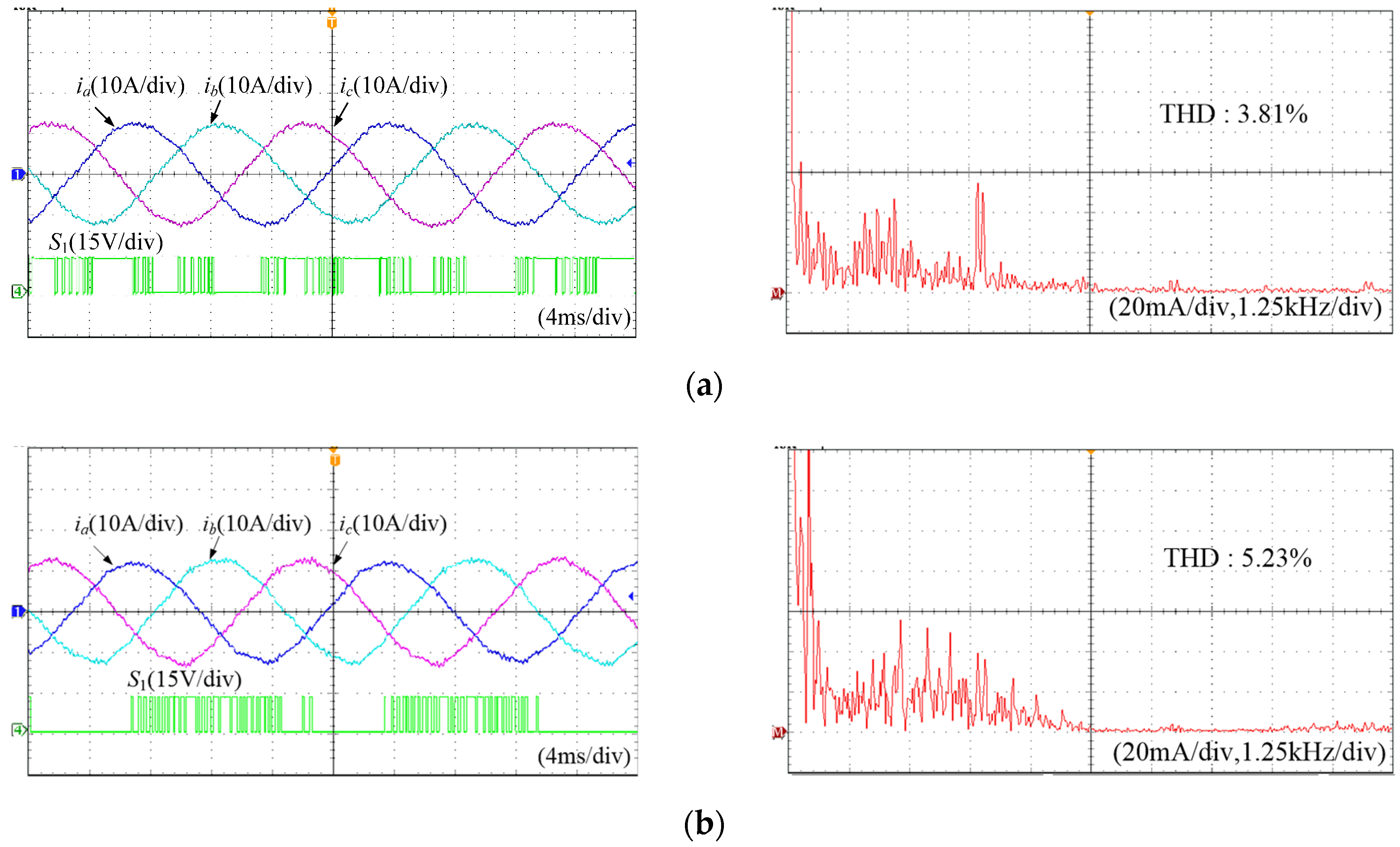
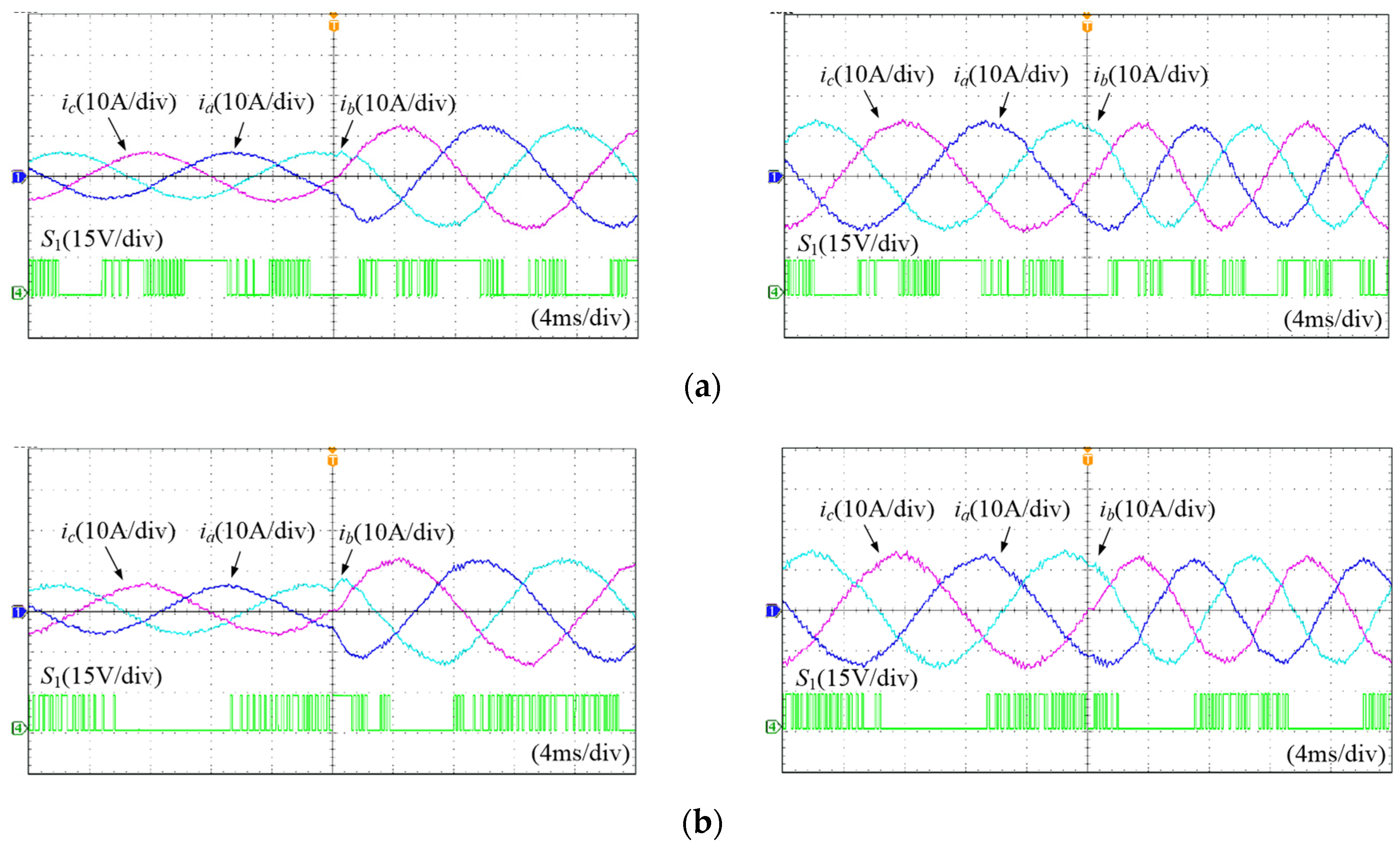
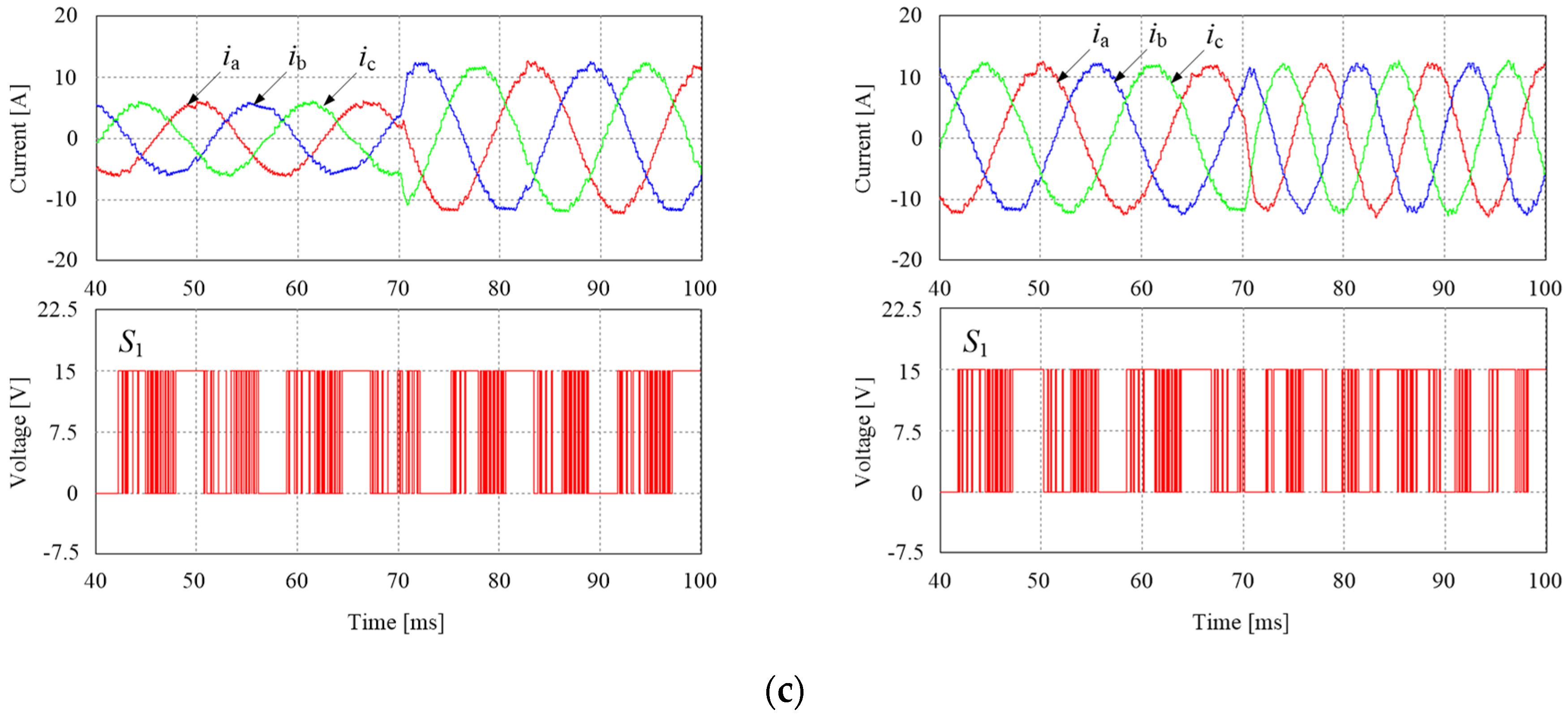
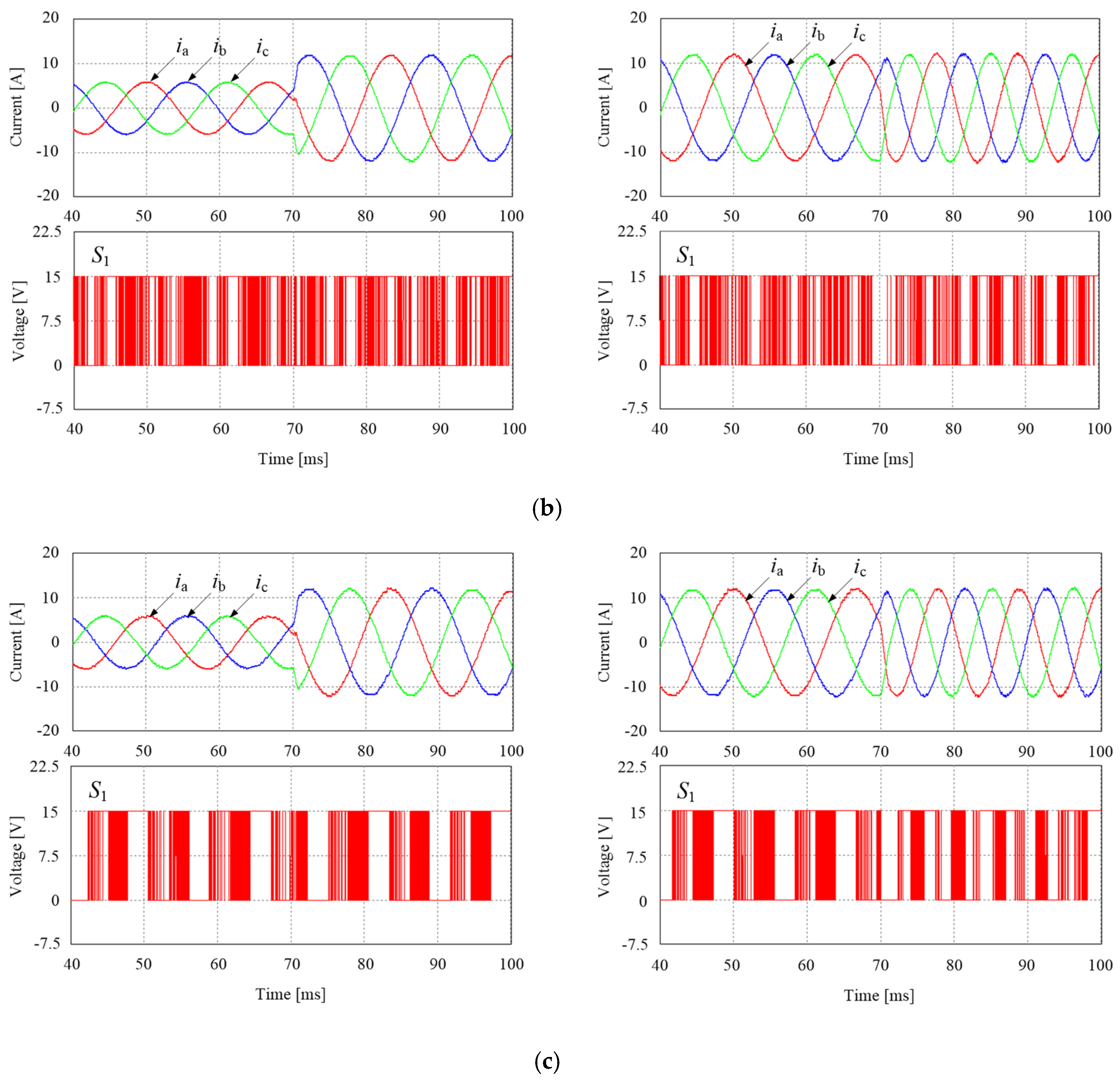
4.1. Simulation and Experimental Results
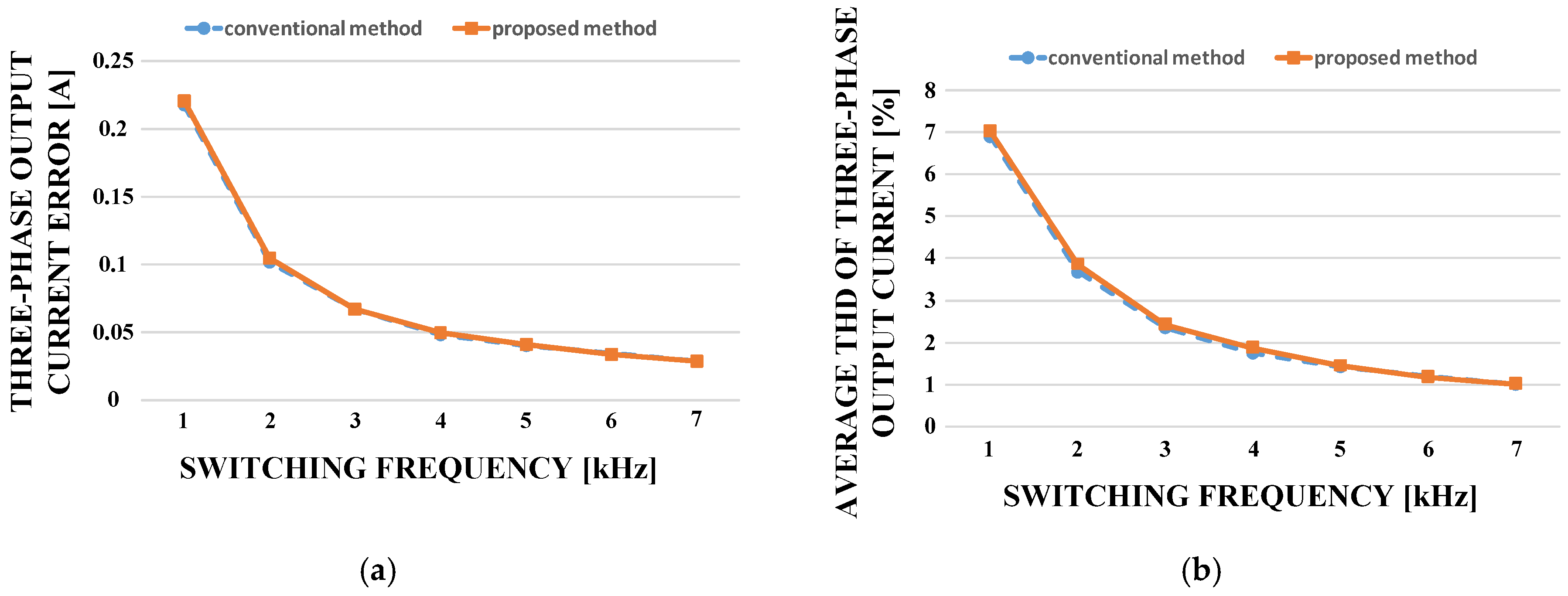
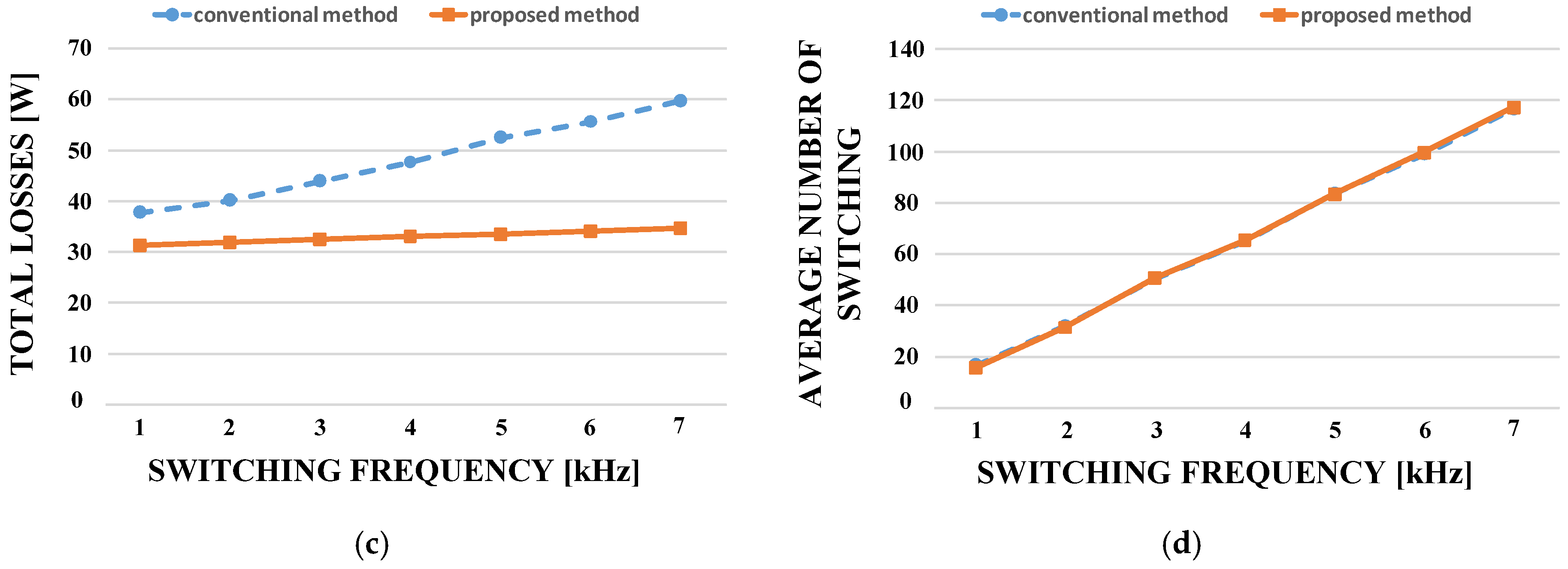
4.2. Performance Comparison
- (1)
- Conv. (1 vector): MPCC method using a single optimal voltage vector [3] with the same sampling period with the proposed method.
- (2)
- Conv. (1 vector): MPCC method using a single optimal voltage vector [3] with half sampling period of the proposed method
- (3)
- Conv. (2 vectors): MPCC method using two optimal voltage vectors [19].
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Liang, D.; Li, J.; Qu, R.; Kong, W. Adaptive second-order sliding-mode observer for PMSM sensorless control considering VSI nonlinearity. IEEE Trans. Power Electron. 2018, 33, 8994–9004. [Google Scholar] [CrossRef]
- Kinnares, V.; Charumit, C. Modulating functions of space vector PWM for three-leg VSI-fed unbalanced two-phase induction motors. IEEE Trans. Power Electron. 2009, 24, 1135–1139. [Google Scholar] [CrossRef]
- Kouro, S.; Cortes, P.; Vargas, R.; Ammann, U.; Rodriguez, J. Model predictive control—A simple and powerful method to control power converters. IEEE Trans. Ind. Electron. 2009, 56, 1826–1838. [Google Scholar] [CrossRef]
- Cortes, P.; Rodriguez, J.; Silva, C.; Flores, A. Delay compensation in model predictive current control of a three-phase inverter. IEEE Trans. Ind. Electron. 2012, 59, 1323–1325. [Google Scholar] [CrossRef]
- Kwak, S.; Park, J.C. Switching strategy based on model predictive control of VSI to obtain high efficiency and balanced loss distribution. IEEE Trans. Power Electron. 2014, 29, 4551–4567. [Google Scholar] [CrossRef]
- Cortes, P.; Rodriguez, J.; Antoniewicz, P.; Kazmierkowski, M. Direct power control of an AFE using predictive control. IEEE Trans. Power Electron. 2008, 23, 2516–2523. [Google Scholar] [CrossRef]
- Jun, E.-S.; Kwak, S. Performance comparison of model predictive control methods for active front end rectifiers. IEEE Access 2018, 6, 77272–77288. [Google Scholar] [CrossRef]
- Gong, Z.; Wu, X.; Dai, P.; Zhu, R. Modulated model predictive control for MMC-based active front-end rectifiers under unbalanced grid conditions. IEEE Trans. Ind. Electron. 2019, 66, 2398–2409. [Google Scholar] [CrossRef]
- Vargas, R.; Cortes, P.; Ammann, U.; Rodriguez, J.; Pontt, J. Predictive control of a three-phase neutral-point-clamped inverter. IEEE Trans. Ind. Electron. 2007, 54, 2697–2705. [Google Scholar] [CrossRef]
- Yaramasu, V.; Wu, B.; Rivera, M.; Narimani, M.; Kouro, S.; Rodriguez, J. Generalised approach for predictive control with common-mode voltage mitigation in multilevel diode-clamped converters. IET Power Electron. 2015, 8, 1440–1450. [Google Scholar] [CrossRef]
- Townsend, C.D.; Summers, T.J.; Vodden, J.; Watson, A.J.; Betz, R.E.; Clare, J.C. Optimization of switching losses and capacitor voltage ripple using model predictive control of a cascaded H-bridge multilevel statcom. IEEE Trans. Power Electron. 2013, 28, 3077–3087. [Google Scholar] [CrossRef]
- Jun, E.-S.; Kwak, S. A Highly Efficient Single-Phase Three-Level Neutral Point Clamped (NPC) Converter Based on Predictive Control with Reduced Number of Commutations. Energies 2018, 11, 3524. [Google Scholar] [CrossRef]
- Rivera, M.; Rojas, C.; Rodriguez, J.; Espinoza, J. Methods of source current reference generation for predictive control in a direct matrix converter. IET Power Electron. 2013, 6, 894–901. [Google Scholar] [CrossRef]
- Siami, M.; Khaburi, D.R.; Rodriguez, J. Simplified finite control set-model predictive control for matrix converter-fed PMSM drives. IEEE Trans. Power Electron. 2018, 33, 2438–2446. [Google Scholar] [CrossRef]
- Wang, L.; Dan, H.; Zhao, Y.; Zhu, Q.; Peng, T.; Sun, Y.; Wheeler, P. A Finite control set model predictive control method for matrix converter with zero common-mode voltage. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 327–338. [Google Scholar] [CrossRef]
- Kwak, S.; Moon, S. Model Predictive Control Methods to Reduce Common-Mode Voltage for Three-Phase Voltage Source Inverters. IEEE Trans. Power Electron. 2015, 30, 5019–5035. [Google Scholar] [CrossRef]
- Blaabjerg, F.; Jaeger, U.; Nielsen, S.M.; Pedersen, J.K. Power losses in PWM-VSI inverter using NPT or PT IGBT devices. IEEE Trans. Power Electron. 1995, 10, 358–367. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, H. Model predictive torque control of induction motor drives with optimal duty cycle control. IEEE Trans. Power Electron. 2014, 29, 6593–6603. [Google Scholar] [CrossRef]
- Park, S.Y.; Kwak, S. Comparative study of three model predictive current control methods with two vectors for three-phase DC/AC VSIs. IET Electron. Power Appl. 2017, 11, 1284–1297. [Google Scholar] [CrossRef]
- Nguyen, H.T.; Jung, J.-W. Asymptotic stability constraints for direct horizon-one model predictive control of SPMSM drives. IEEE Trans. Power Electron. 2018, 33, 8213–8219. [Google Scholar] [CrossRef]
- Mwasilu, F.; Kim, E.-K.; Fafaq, M.S.; Jung, J.-W. Finite-set model predictive control scheme with an optimal switching voltage vector technique for high-performance IPMSM drive applications. IEEE Trans. Ind. Inform. 2018, 14, 3840–3848. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, H.; Xia, B. Model predictive torque control of induction motor drives with reduced torque ripple. IET Elect. Power Appl. 2015, 9, 595–604. [Google Scholar] [CrossRef]
- Kwak, S.; Park, J.-C. Model-predictive direct power control with vector preselectiontechnique for highly efficient active rectifiers. IEEE Trans. Ind. Inform. 2015, 11, 44–52. [Google Scholar] [CrossRef]
- Zhang, Y.; Peng, Y.; Yang, H. Performance improvement of two-vectors-based model predictive control of PWM rectifier. IEEE Trans. Power Electron. 2016, 31, 6016–6030. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, H. Two-vector-based model predictive torque control without weighting factors for induction motor drives. IEEE Trans. Power Electron. 2016, 31, 1381–1390. [Google Scholar] [CrossRef]
- Kwak, S.; Park, J.-C. Predictive control method with future zero-sequence voltage to reduce switching losses in three-phase voltage source inverters. IEEE Trans. Power Electron. 2015, 30, 1558–1566. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Conditions | Pre-Selected Vectors | Clamped Switch | ||||
|---|---|---|---|---|---|---|
| Phase Voltages | Output Currents | |||||
| Max | Min | Max | Min | Active | Zero | |
| van | vcn | ia | ib | V1V2V6 | V7 | S1 |
| vcn | van | ib | ia | V3V4V5 | V0 | S2 |
| vbn | van | ib | ic | V2V3V4 | V7 | S3 |
| van | vbn | ic | ib | V1V5V6 | V0 | S4 |
| vcn | vbn | ic | ia | V4V5V6 | V7 | S5 |
| vbn | vcn | ia | ic | V1V2V3 | V0 | S6 |
| THD [%] | Current Error [A] | Execution Time [μs] | Losses [W] | Power Efficiency [%] | |||
|---|---|---|---|---|---|---|---|
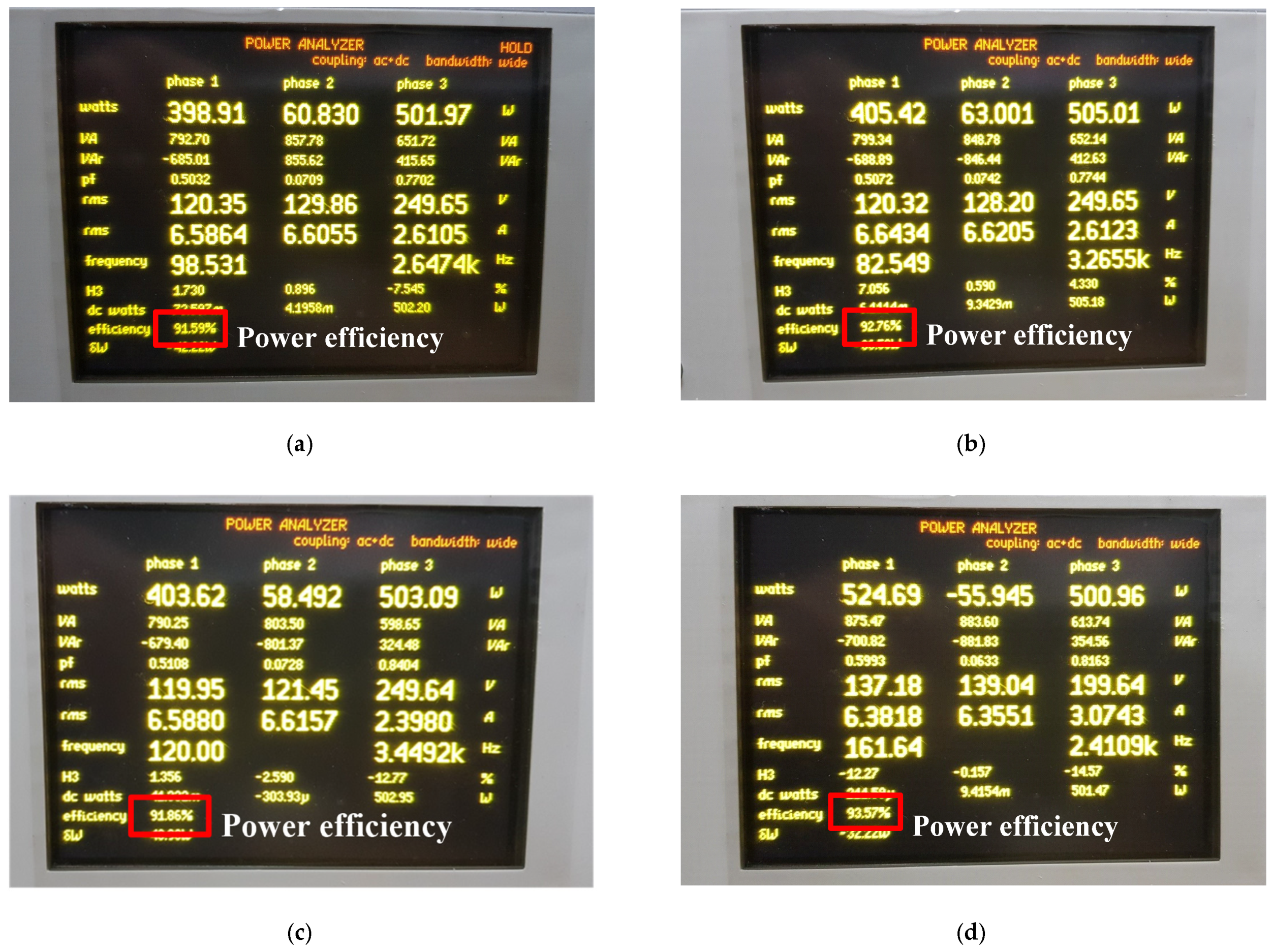
| Conv (1 vector) | 4.48 | 0.083 | 5.15 | 42.23 | 91.59 | 125 | 8 |
| 8.61 | 0.158 | 5.15 | 36.59 | 92.76 | 250 | 4 | |
| Conv (2 vectors) | 3.96 | 0.111 | 19.04 | 40.98 | 91.86 | 250 | 4 |
| Proposed | 3.87 | 0.105 | 22.06 | 32.215 | 93.57 | 250 | 4 |
| THD [%] | Losses [W] | Power Efficiency [%] | |||
|---|---|---|---|---|---|
| Conv (1 vector) | 4.48 | 40.28 | 91.94 | 125 | 8 |
| Proposed | 3.87 | 31.12 | 93.78 | 250 | 4 |
| THD [%] | Losses [W] | Power Efficiency [%] | |||
|---|---|---|---|---|---|
| Conv (1 vector) | 5.23 | 42.23 | 91.59 | 125 | 8 |
| Proposed | 3.81 | 32.215 | 93.57 | 250 | 4 |
| THD [%] | Losses [W] | Power Efficiency [%] | |
|---|---|---|---|
| Simulation | 3.87 | 31.12 | 93.78 |
| Experiment | 3.81 | 32.215 | 93.57 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jun, E.-S.; Park, S.-y.; Kwak, S. Model Predictive Current Control Method with Improved Performances for Three-Phase Voltage Source Inverters. Electronics 2019, 8, 625. https://doi.org/10.3390/electronics8060625
Jun E-S, Park S-y, Kwak S. Model Predictive Current Control Method with Improved Performances for Three-Phase Voltage Source Inverters. Electronics. 2019; 8(6):625. https://doi.org/10.3390/electronics8060625
Chicago/Turabian StyleJun, Eun-Su, So-young Park, and Sangshin Kwak. 2019. "Model Predictive Current Control Method with Improved Performances for Three-Phase Voltage Source Inverters" Electronics 8, no. 6: 625. https://doi.org/10.3390/electronics8060625
APA StyleJun, E.-S., Park, S.-y., & Kwak, S. (2019). Model Predictive Current Control Method with Improved Performances for Three-Phase Voltage Source Inverters. Electronics, 8(6), 625. https://doi.org/10.3390/electronics8060625