Accurate Rigid Body Localization Using DoA Measurements from a Single Base Station

 ,
,
Abstract
1. Introduction
1.1. Background
1.2. Related Works
1.3. Contributions
2. Problem Formulation and Constrained Cramér–Rao Bound (CCRB)
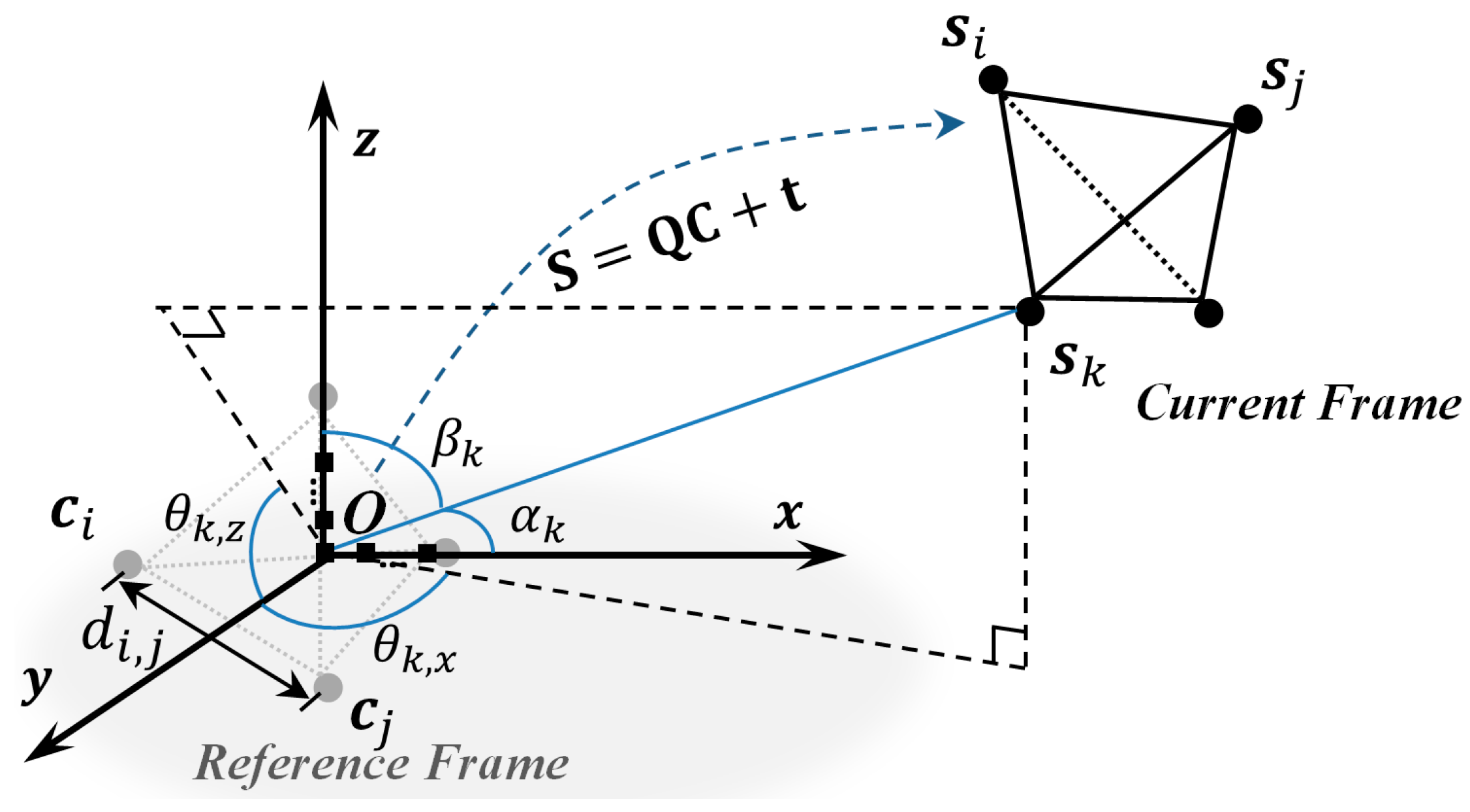
2.1. Rigid Body Localization (RBL) Based on Direction of Arrival (DoA) Measurements from a Single Base Station (BS)
2.2. CCRB
3. Proposed RBL Algorithms
3.1. Observation Matching (OM) Approach
3.2. Topology Matching (TM) with Refinement
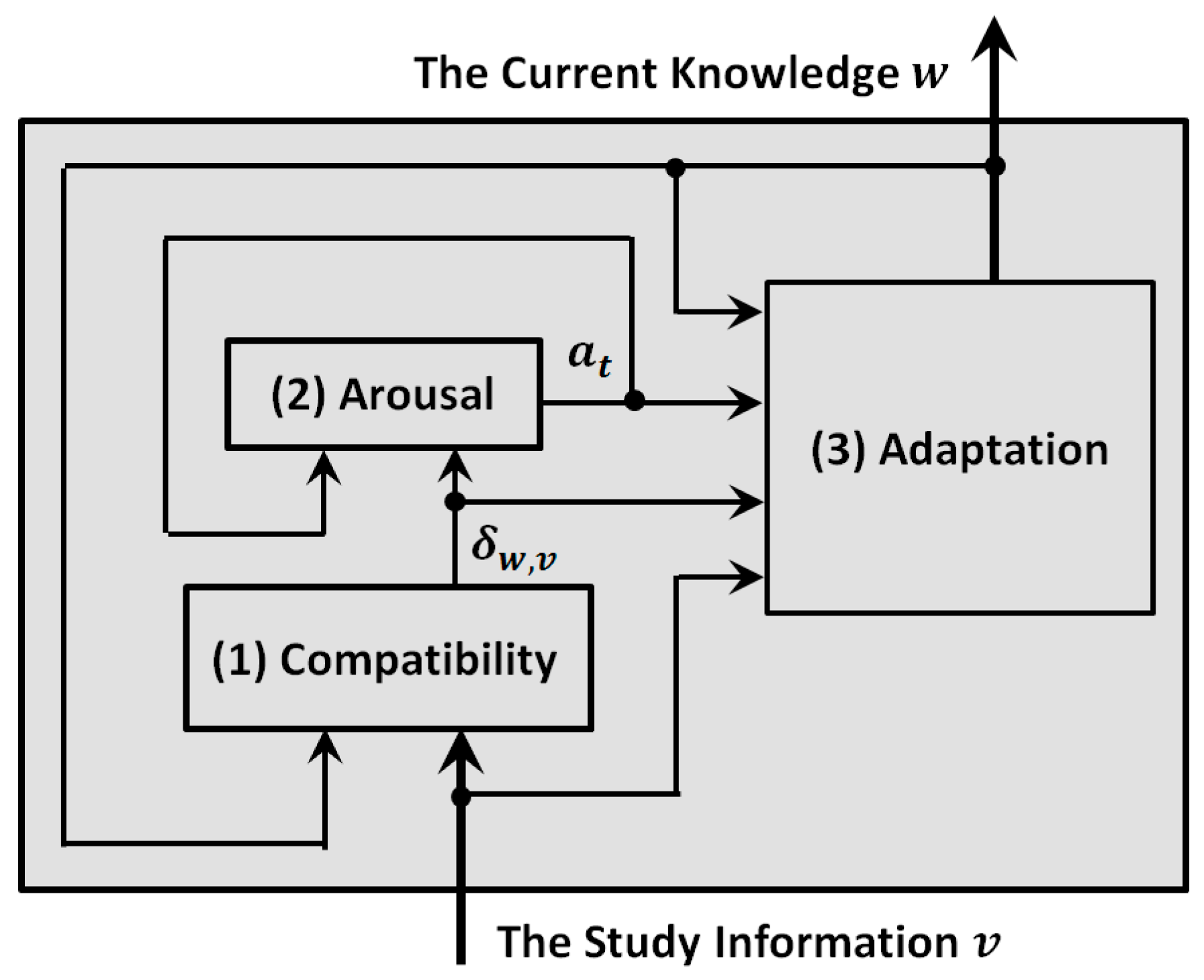
4. Solving (18) and (22) Using a Participatory Searching Algorithm (PSA)
| Algorithm 1 Participatory Search Algorithm (PSA) |
| Initialization: Randomly set in the restricted area; ; ; is the fitness (objective) function. |
| do |
| Randomly generate individuals in the restricted area and form individuals: . Each individual contains unknowns; |
| Update with ; |
| Pairing: |
| For each individual , find its mate by |
| , ; |
| Let ; |
| for |
| Selection: |
| if then ; |
| else ; end if |
| Recombination: |
| Choose randomly; |
| Compute ; |
| Generate offspring ; |
| Mutation: |
| Get |
| if then ; end if |
| if then ; end if |
| end |
| ; |
| while |
| return |
5. Performance Evaluation
5.1. Simulation Setup
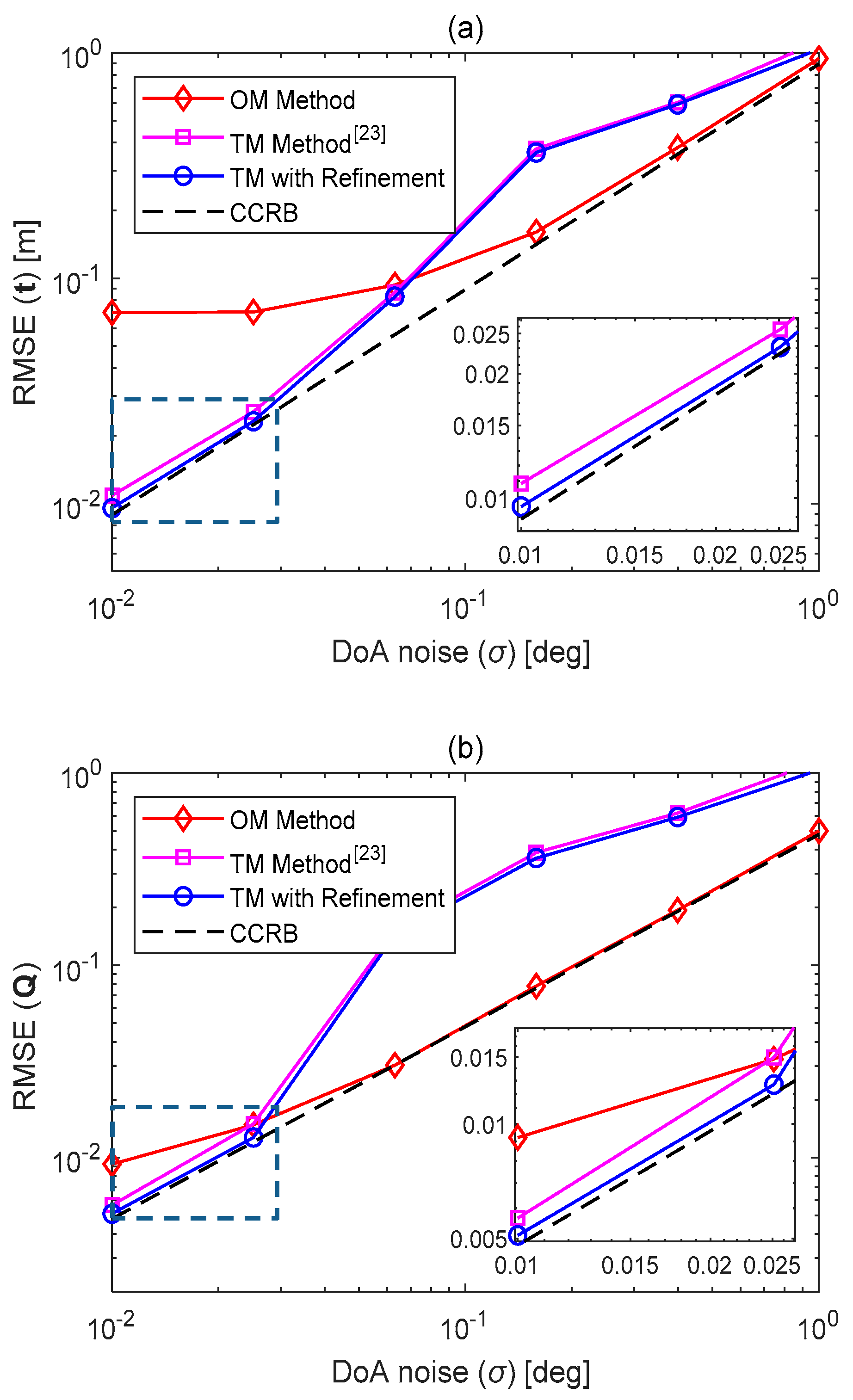
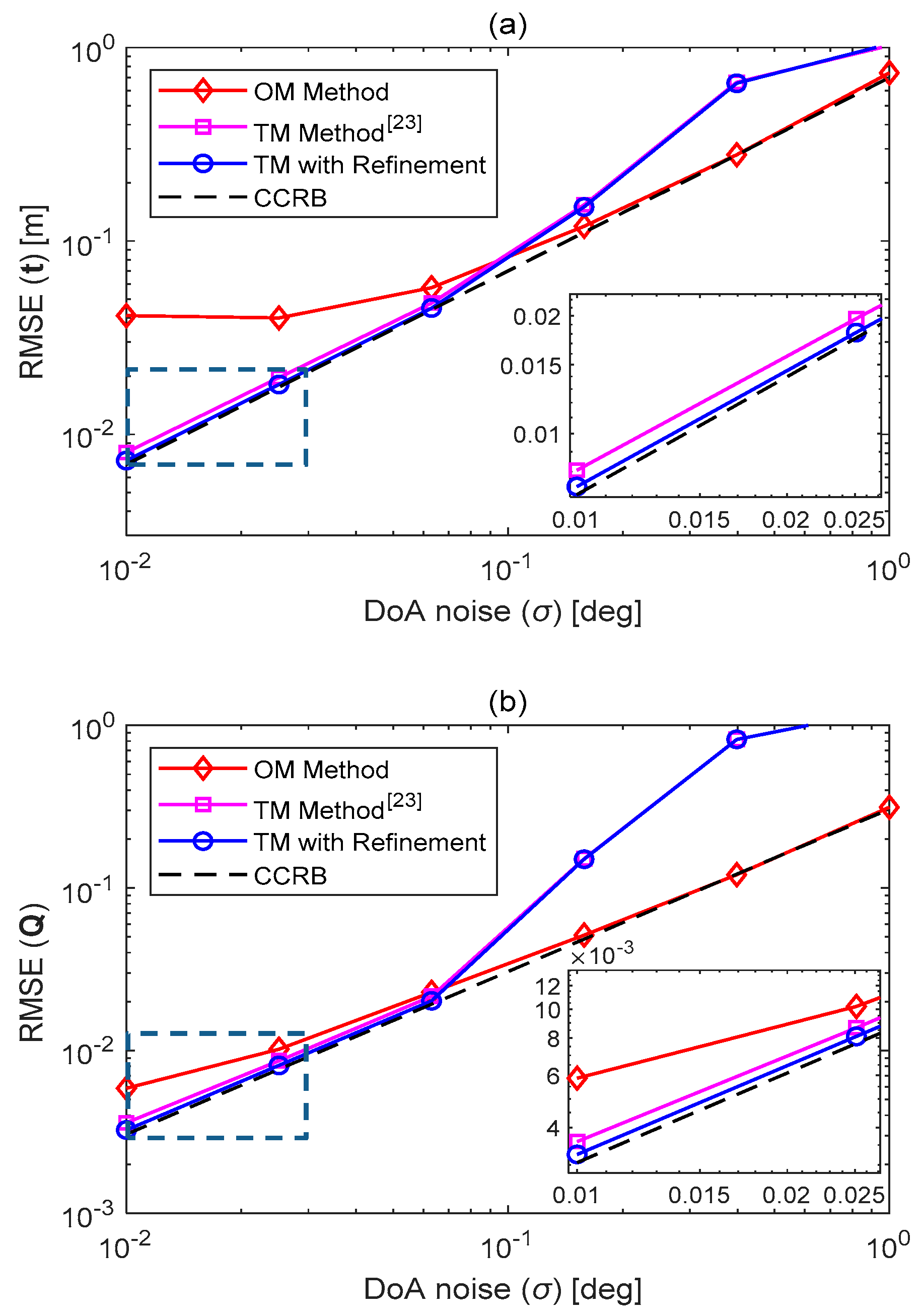
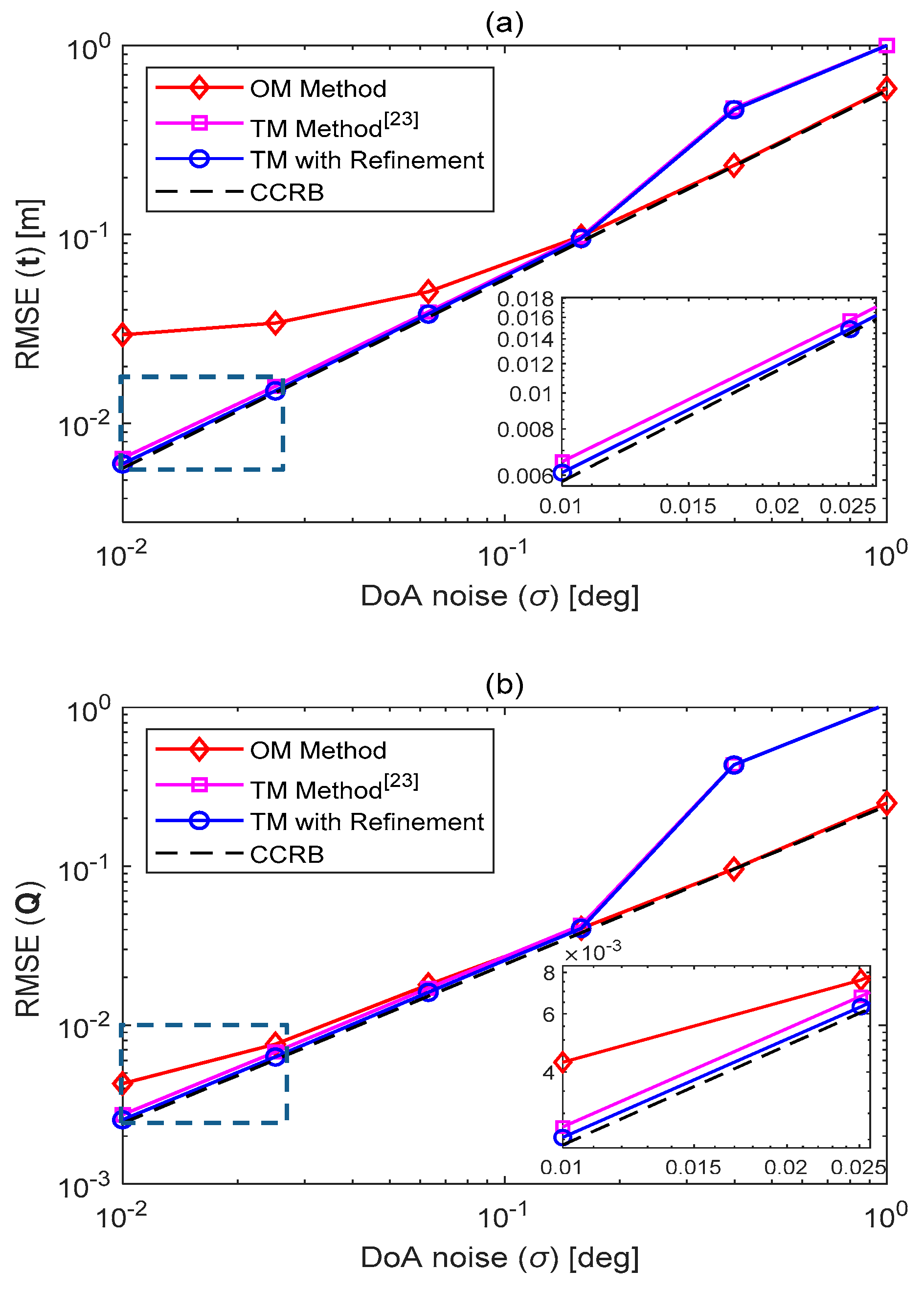
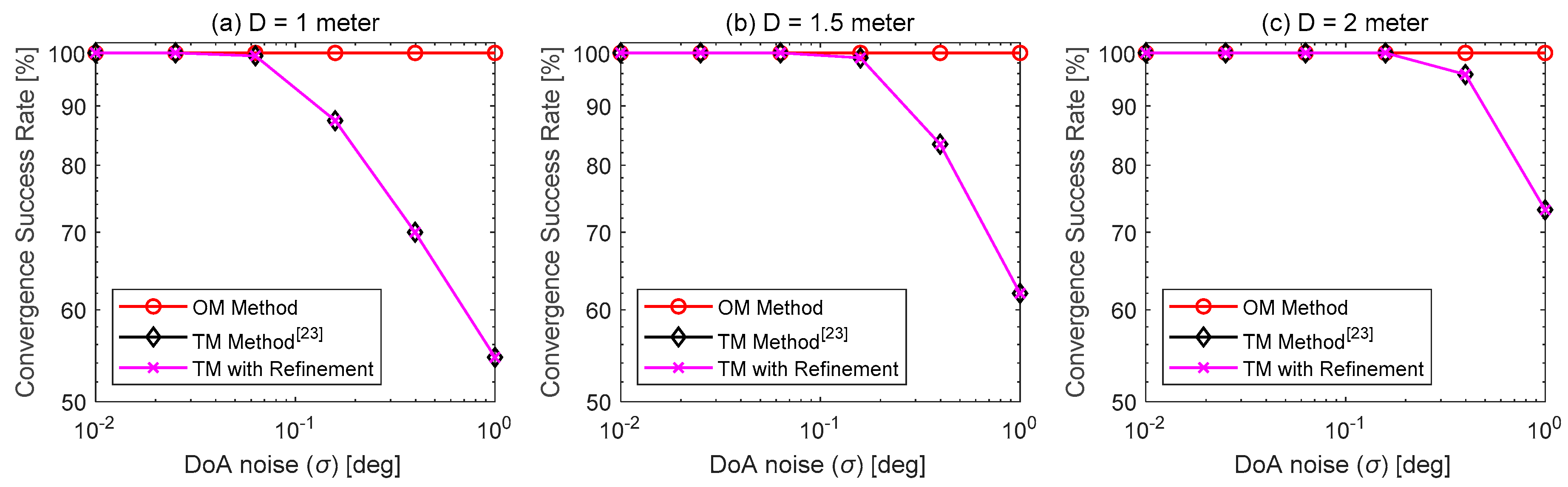
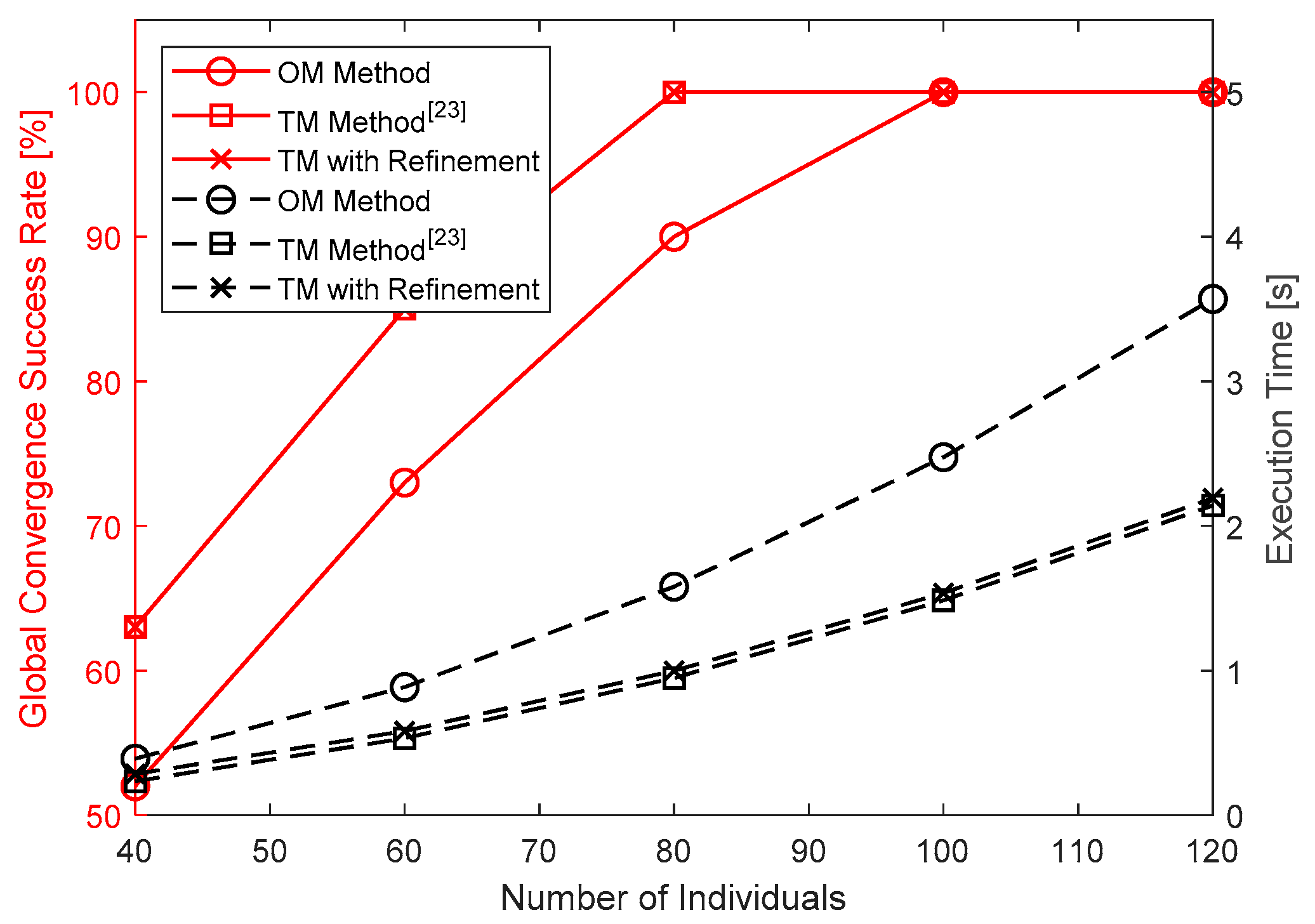
5.2. Simulation Results Evaluation
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Featherstone, R. Robot Dynamics Algorithms; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- From, P.J.; Gravdahl, J.T.; Pettersen, K.Y. Rigid Body Dynamics, Vehicle-Manipulator Systems; Springer: Berlin/Heidelberg, Germany, 2014; pp. 191–227. [Google Scholar]
- Garcia-Nieto, S.; Velasco-Carrau, J.; Paredes-Valles, F.; Salcedo, J.V.; Simarro, R. Motion Equations and Attitude Control in the Vertical Flight of a VTOL Bi-Rotor UAV. Electronics 2019, 8, 208. [Google Scholar] [CrossRef]
- Sauer, J.; Schömer, E. A Constraint-Based Approach to Rigid Body Dynamics for Virtual Reality Applications. In Proceedings of the ACM symposium on Virtual Reality Software and Technology, Taipei, Taiwan, 2–5 November 1998; pp. 153–162. [Google Scholar]
- Hua, M.D. Attitude estimation for accelerated vehicles using GPS/INS measurements. Control Eng. Pr. 2010, 18, 723–732. [Google Scholar] [CrossRef]
- Liu, C.; Yang, L.; Mihaylova, L. Dual-satellite source geolocation with time and frequency offsets and satellite location errors. In Proceedings of the 20th International Conference on Information Fusion (Fusion), Xi’an, China, 10–13 July 2017; pp. 1–8. [Google Scholar]
- Liu, L.; Zhang, X.; Chen, P. Compressed Sensing-Based DoA Estimation with Antenna Phase Errors. Electronics 2019, 8, 294. [Google Scholar] [CrossRef]
- Kim, Y.; Kim, N. An Enhanced 3D Positioning Scheme Exploiting Adaptive Pulse Selection for Indoor LOS Environments. Wirel. Pers. Commun. 2014, 77, 2537–2548. [Google Scholar] [CrossRef]
- Namvar, M.; Safaei, F. Adaptive Compensation of Gyro Bias in Rigid-Body Attitude Estimation Using a Single Vector Measurement. IEEE Trans. Autom. Control 2013, 58, 1816–1822. [Google Scholar] [CrossRef]
- Wu, Y.; Shi, W. On Calibration of Three-Axis Magnetometer. IEEE Sens. J. 2015, 15, 6424–6431. [Google Scholar] [CrossRef]
- Wu, Z.; Yao, M.; Ma, H.; Jia, W. Improving Accuracy of the Vehicle Attitude Estimation for Low-Cost INS/GPS Integration Aided by the GPS-Measured Course Angle. IEEE Trans. Intell. Transp. Syst. 2013, 14, 553–564. [Google Scholar] [CrossRef]
- Zhu, J.; Li, T.; Wang, J.; Hu, X.; Wu, M. Rate-gyro-integral constraint for ambiguity resolution in GNSS attitude determination applications. Sensors 2013, 13, 7979–7999. [Google Scholar] [CrossRef]
- Peng, H.M.; Chang, E.R.; Wang, L.S. Rotation method for direction finding via GPS carrier phases. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 72–84. [Google Scholar] [CrossRef]
- Natraj, A.; Ly, D.S.; Eynard, D.; Demonceaux, C.; Vasseur, P. Omnidirectional vision for UAV: Applications to attitude, motion and altitude estimation for day and night conditions. J. Intell. Robot. Syst. 2013, 69, 459–473. [Google Scholar] [CrossRef]
- Serra, P.; Cunha, R.; Hamel, T.; Cabecinhas, D.; Silvestre, C. Landing of a Quadrotor on a Moving Target Using Dynamic Image-Based Visual Servo Control. IEEE Trans. Robot. 2016, 32, 1524–1535. [Google Scholar] [CrossRef]
- Eggert, D.W.; Lorusso, A.; Fisher, R.B. Estimating 3-D Rigid Body Transformations: A Comparison of Four Major Algorithms. Mach. Vis. Appl. 1997, 9, 272–290. [Google Scholar] [CrossRef]
- Pizzo, A.; Chepuri, S.P.; Leus, G. Towards Multi-rigid Body Localization. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Shanghai, China, 20–25 March 2016; pp. 3166–3170. [Google Scholar]
- Chepuri, S.P.; Leus, G.; van der Veen, A.-J. Rigid Body Localization Using Sensor Networks. IEEE Trans. Signal Process. 2014, 62, 4911–4924. [Google Scholar] [CrossRef]
- Chen, S.; Ho, K.C. Accurate Localization of A Rigid Body Using Multiple Sensors and Landmarks. IEEE Trans. Signal Process. 2015, 63, 6459–6472. [Google Scholar] [CrossRef]
- Jiang, J.; Wang, G.; Ho, K.C. Accurate Rigid Body Localization via Semi-definite Relaxation Using Range Measurements. IEEE Signal Process. Lett. 2018, 25, 378–382. [Google Scholar] [CrossRef]
- Jiang, J.; Wang, G.; Ho, K.C. Sensor Network-Based Rigid Body Localization via Semi-Definite Relaxation Using Arrival Time and Doppler Measurements. IEEE Trans. Wirel. Commun. 2019, 18, 1011–1025. [Google Scholar] [CrossRef]
- Zhou, B.; Jing, C.; Kim, Y. Joint ToA/AOA Positioning Scheme with IP-OFDM Systems. Wirel. Pers. Commun. 2014, 75, 261–271. [Google Scholar] [CrossRef]
- Zhou, B.; Ai, L.; Dong, X.; Yang, L. DoA-Based Rigid Body Localization Adopting Single Base Station. IEEE Commun. Lett. 2019, 23, 494–497. [Google Scholar] [CrossRef]
- Liu, Y.L.; Gomide, F. A Participatory Search Algorithm. In Evolutionary Intelligence; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Diebel, J. Representing attitude: Euler angles, unit quaternions, and rotation vectors. Matrix 2006, 58, 15–16. [Google Scholar]
- Sun, M.; Yang, L.; Guo, F. Improving noisy sensor positions using accurate inter-sensor range measurements. Signal Process. 2014, 94, 138–143. [Google Scholar] [CrossRef]
- Gu, J.F.; Zhu, W.P.; Swamy, M.N.S. Joint 2-D DoA estimation via sparse L-shaped array. IEEE Trans. Signal Process. 2015, 63, 1171–1182. [Google Scholar] [CrossRef]
- Meng, D.; Wang, X.; Huang, M.; Shen, C.; Bi, G. Weighted Block Sparse Recovery Algorithm for High Resolution DoA Estimation with Unknown Mutual Coupling. Electronics 2018, 7, 217. [Google Scholar] [CrossRef]
- Kay, S.M. Fundamentals of Statistical Signal Processing: Estimation Theory; Prentice Hall: Upper Saddle River, NJ, USA, 1993. [Google Scholar]
- Stoica, P.; Ng, B.C. On the Cramér-Rao bound under parametric constraints. IEEE Signal Process. Lett. 1998, 5, 177–179. [Google Scholar] [CrossRef]
- Cox, T.; Cox, M. Multidimensional Scaling; CRC Press: Boca Raton, FL, USA, 2000. [Google Scholar]
- Yager, R.R. A model of participatory learning. IEEE Trans. Syst. Man Cybern. 1990, 20, 1229–1234. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Noise | |||
|---|---|---|---|
| Size | |||
| 11.3/8.7 (1.14 dB) 1 | 26.6/22.3 (0.77 dB) | ||
| 8.7/7.3 (0.76 dB) | 20.9/16.4 (1.05 dB) | ||
| 7.3/6.5 (0.50 dB) | 17.6/15.2 (0.64 dB) | ||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, B.; Yao, X.; Yang, L.; Yang, S.; Wu, S.; Kim, Y.; Ai, L. Accurate Rigid Body Localization Using DoA Measurements from a Single Base Station. Electronics 2019, 8, 622. https://doi.org/10.3390/electronics8060622
Zhou B, Yao X, Yang L, Yang S, Wu S, Kim Y, Ai L. Accurate Rigid Body Localization Using DoA Measurements from a Single Base Station. Electronics. 2019; 8(6):622. https://doi.org/10.3390/electronics8060622
Chicago/Turabian StyleZhou, Biao, Xiaofeng Yao, Le Yang, Shangyi Yang, Shaojie Wu, Youngok Kim, and Lingyu Ai. 2019. "Accurate Rigid Body Localization Using DoA Measurements from a Single Base Station" Electronics 8, no. 6: 622. https://doi.org/10.3390/electronics8060622
APA StyleZhou, B., Yao, X., Yang, L., Yang, S., Wu, S., Kim, Y., & Ai, L. (2019). Accurate Rigid Body Localization Using DoA Measurements from a Single Base Station. Electronics, 8(6), 622. https://doi.org/10.3390/electronics8060622