Time Series Analysis to Predict End-to-End Quality of Wireless Community Networks †

 , , , and
, , , and
Abstract
1. Introduction
- A detailed analysis of path properties behavior in Wireless Mesh Community Networks (WMCNs) shows that Path Quality prediction is possible and meaningful.
- Time-Series analysis is used to estimate EtEQ in the routing layer of real-world WMCNs.
- Clear evidence that EtEQ values computed through Time-Series algorithms can make accurate predictions in WMCNs is provided.
- A detailed analysis of the prediction accuracy for the next step considering also the hour of the day, and for some steps ahead in the future is presented.
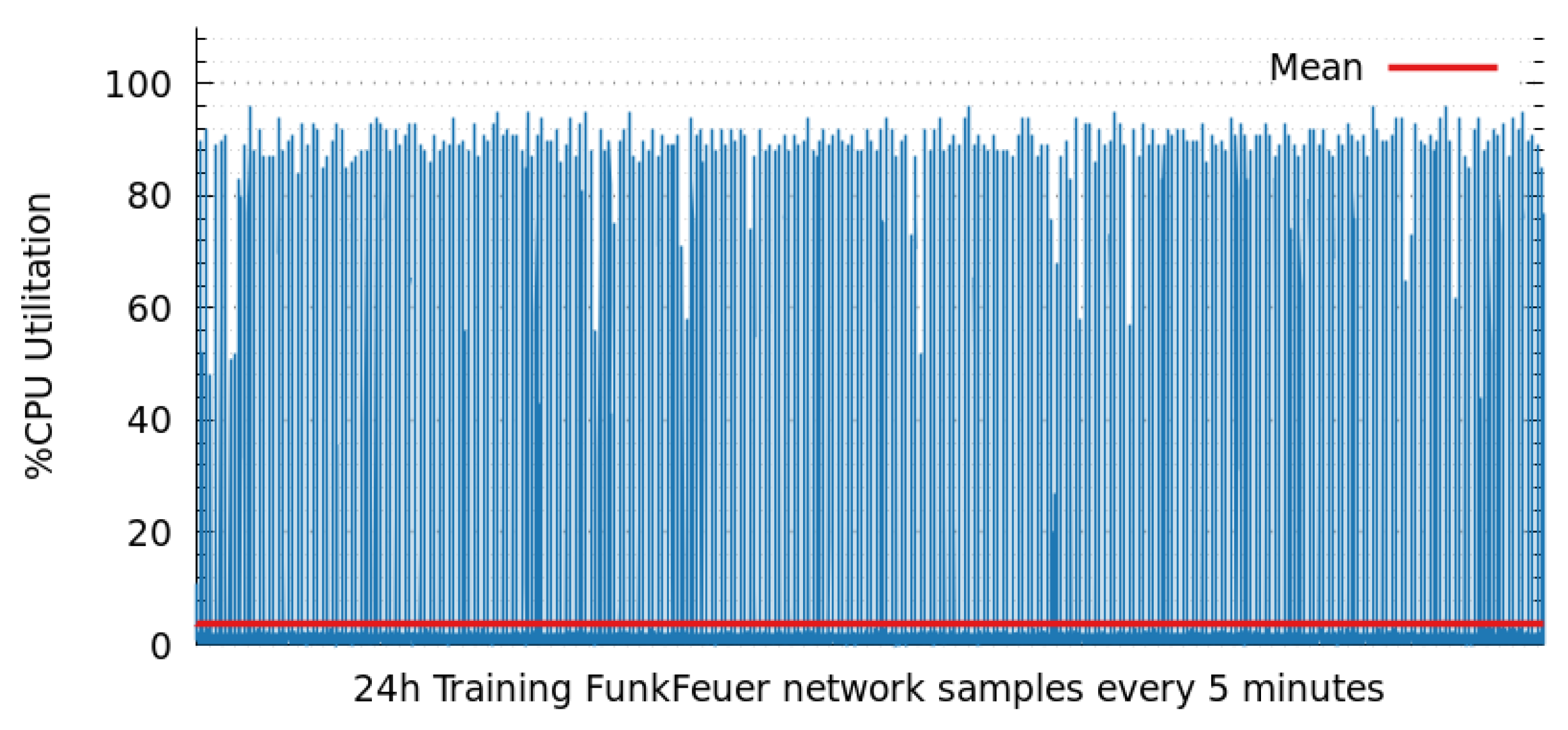
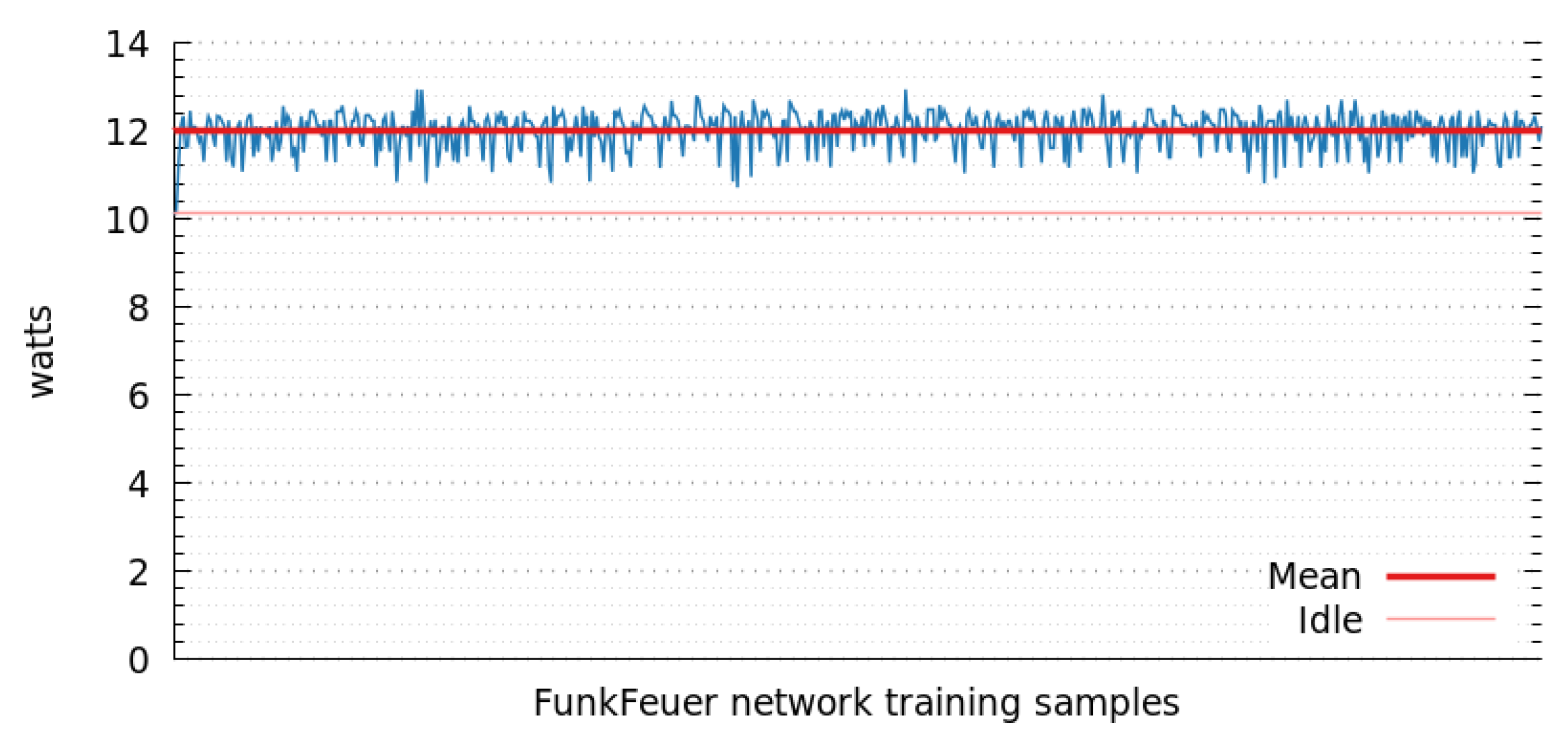
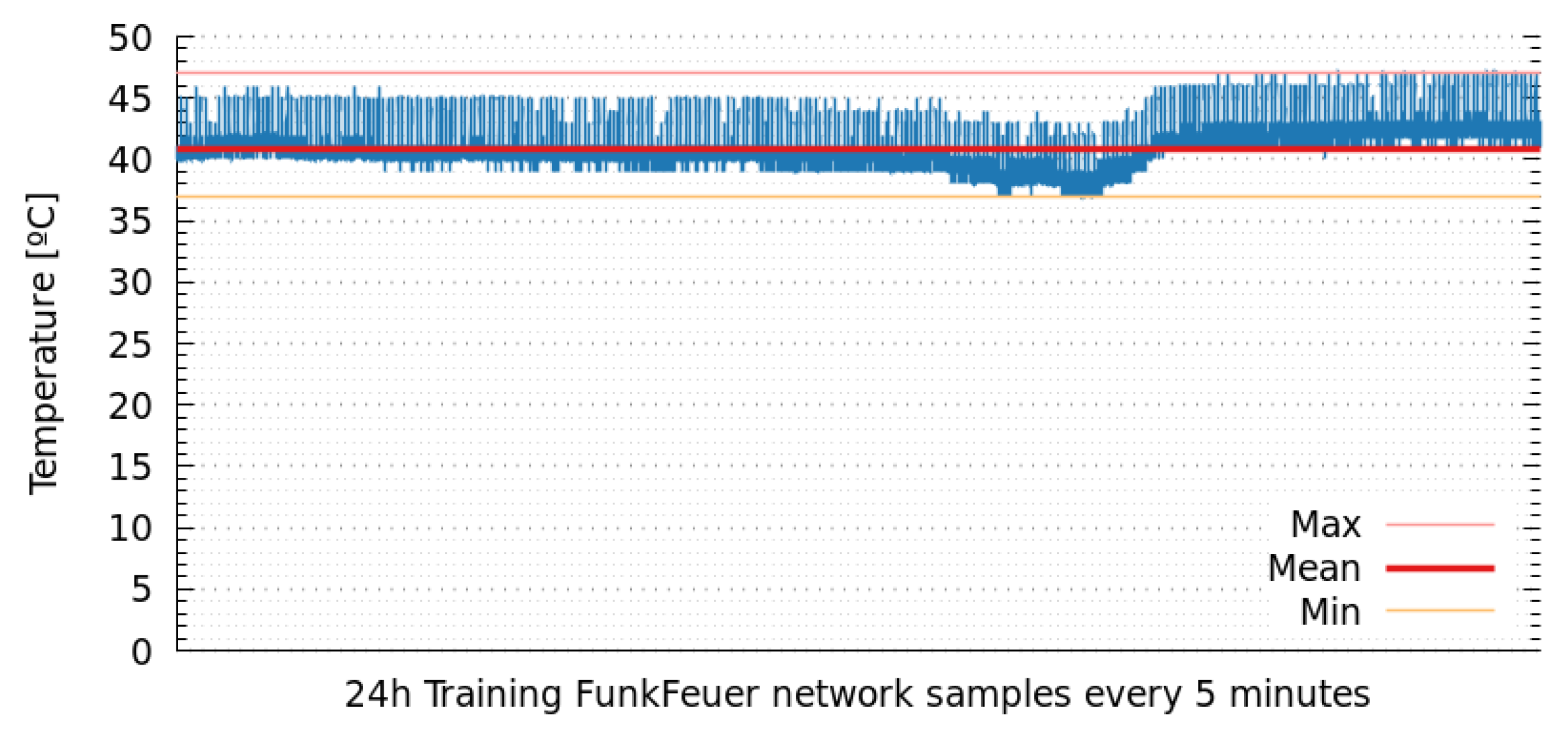
- An analysis of the computational cost of the prediction in terms of CPU utilization, energy consumption and temperature to confirm that the prediction can be executed directly in the routers is presented.
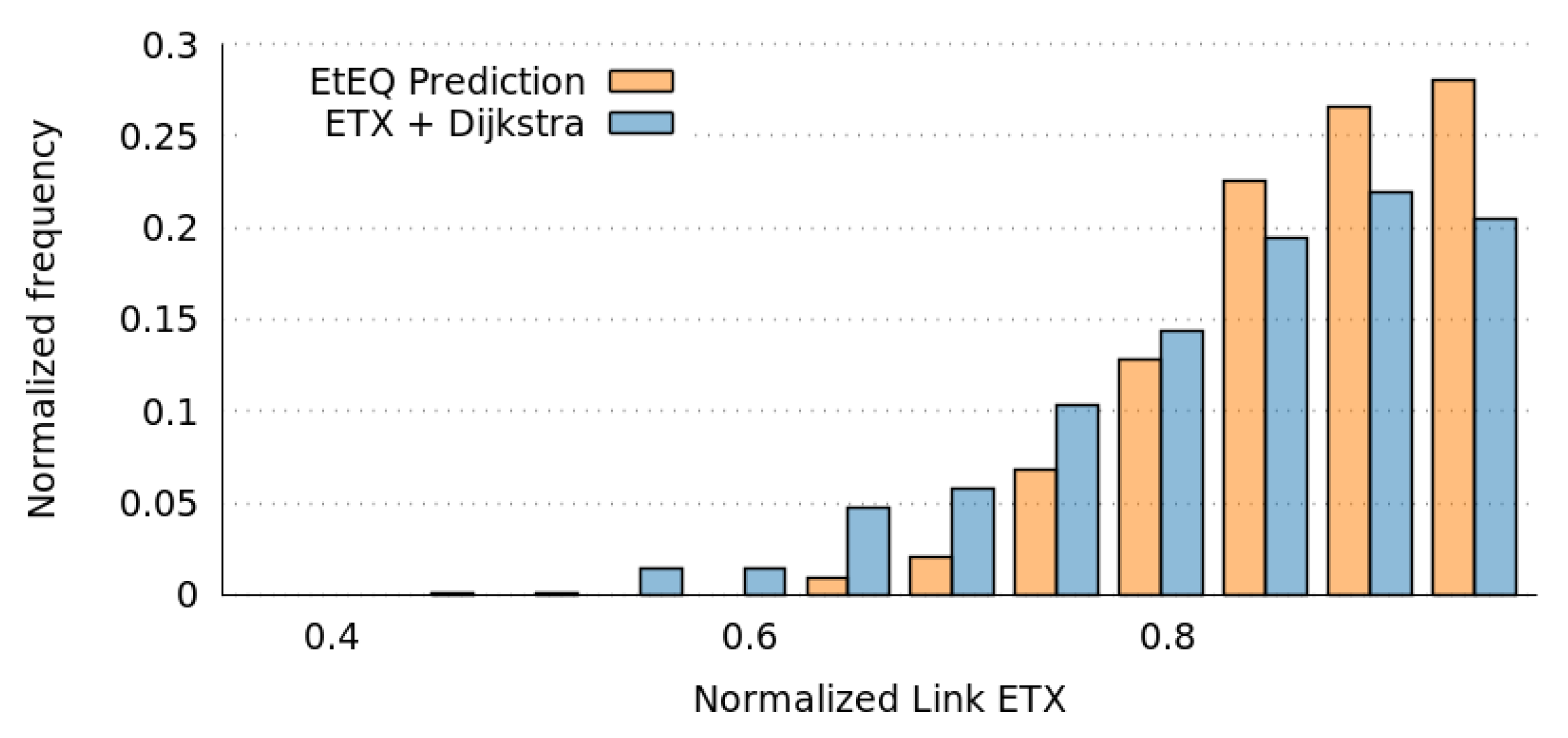
- A detailed analysis of a use case shows the behavior of two orthogonal routing strategies, in terms of Packet Delivery Ratio, ETX of links, and End-to-End Delay.
2. Link and End-to-End Quality Prediction in Heterogeneous Networks
3. Experimental Dataset
3.1. Dataset Description
3.2. Dataset Analysis
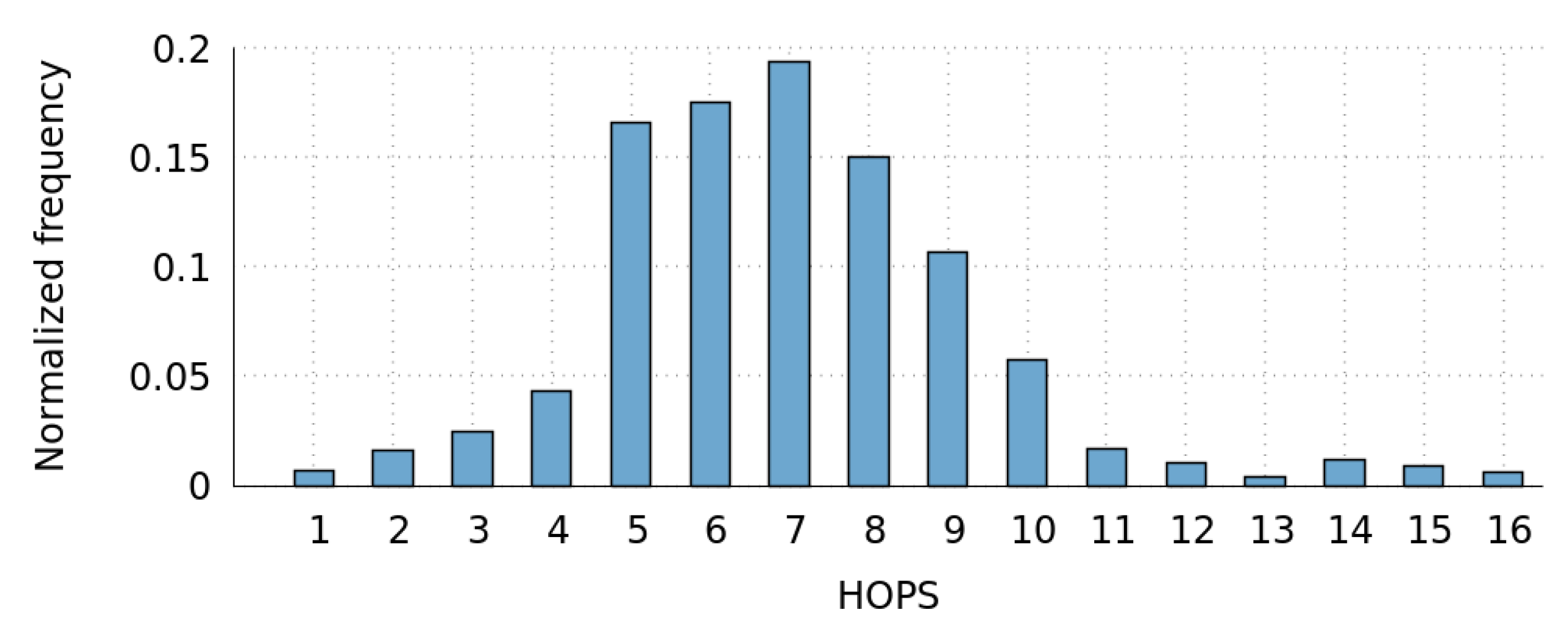
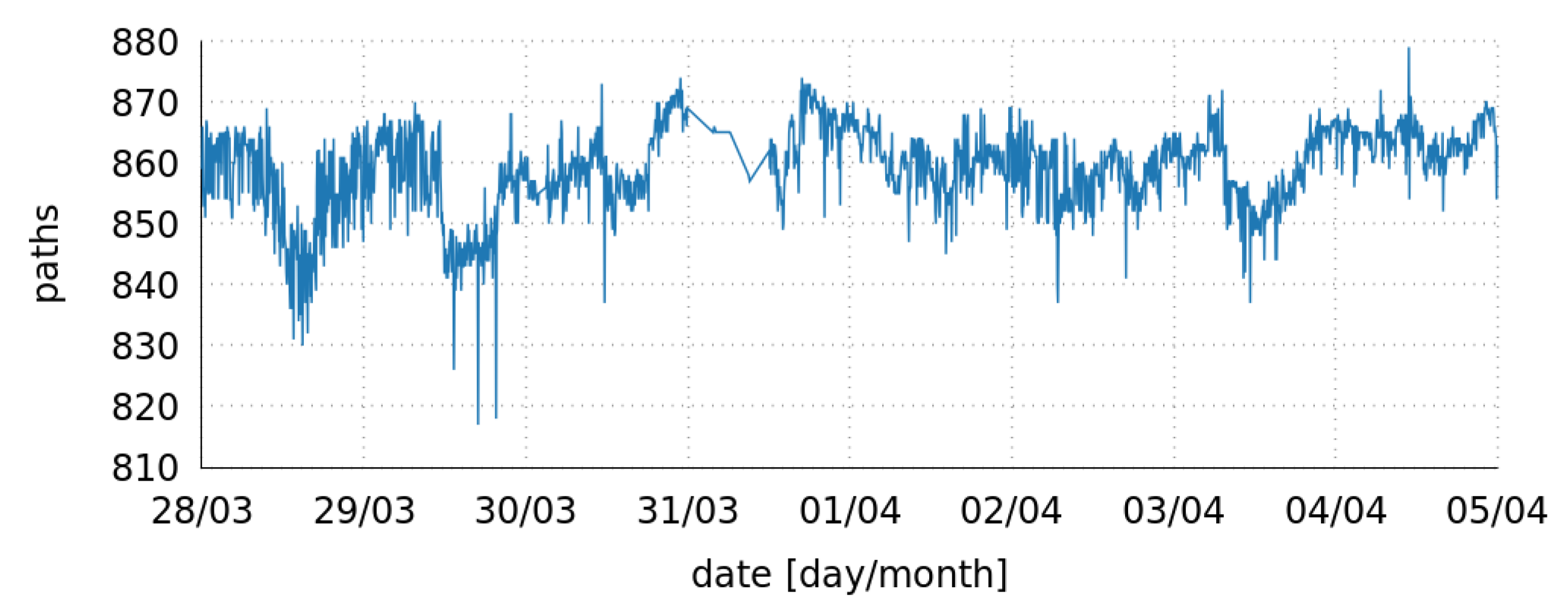
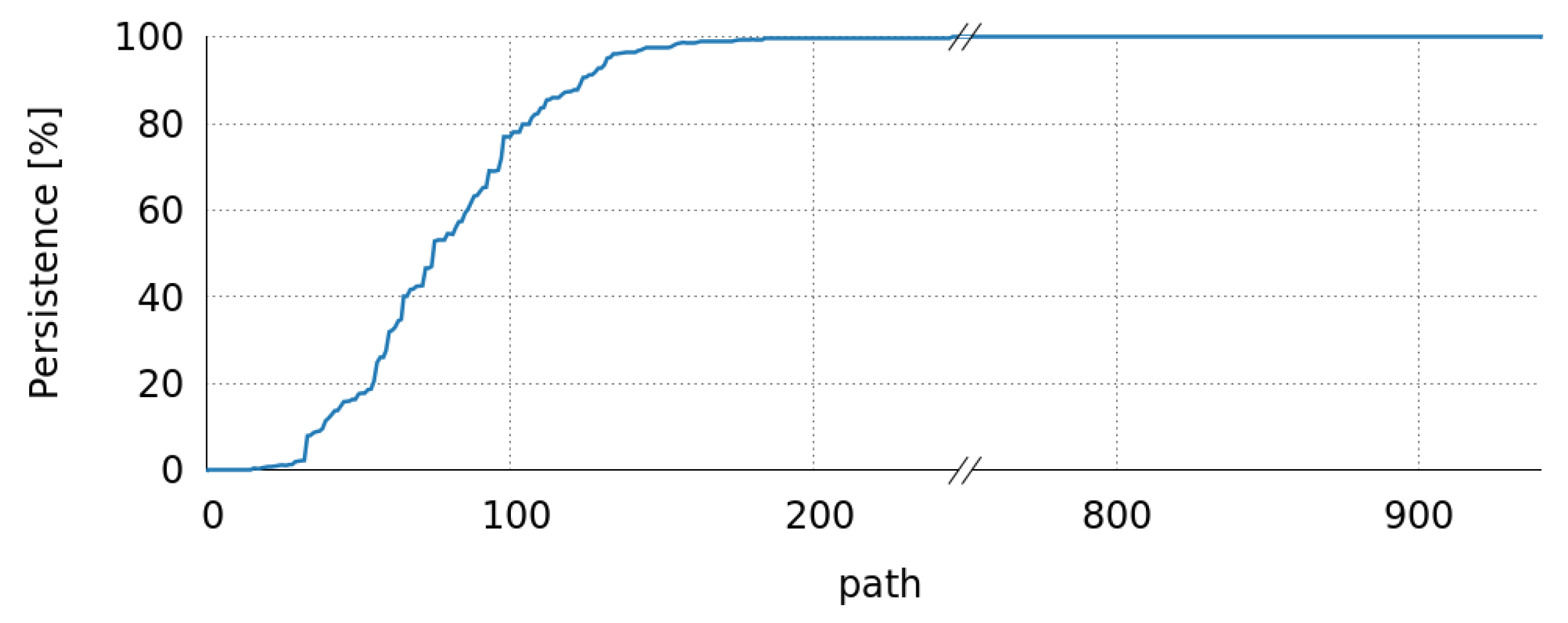
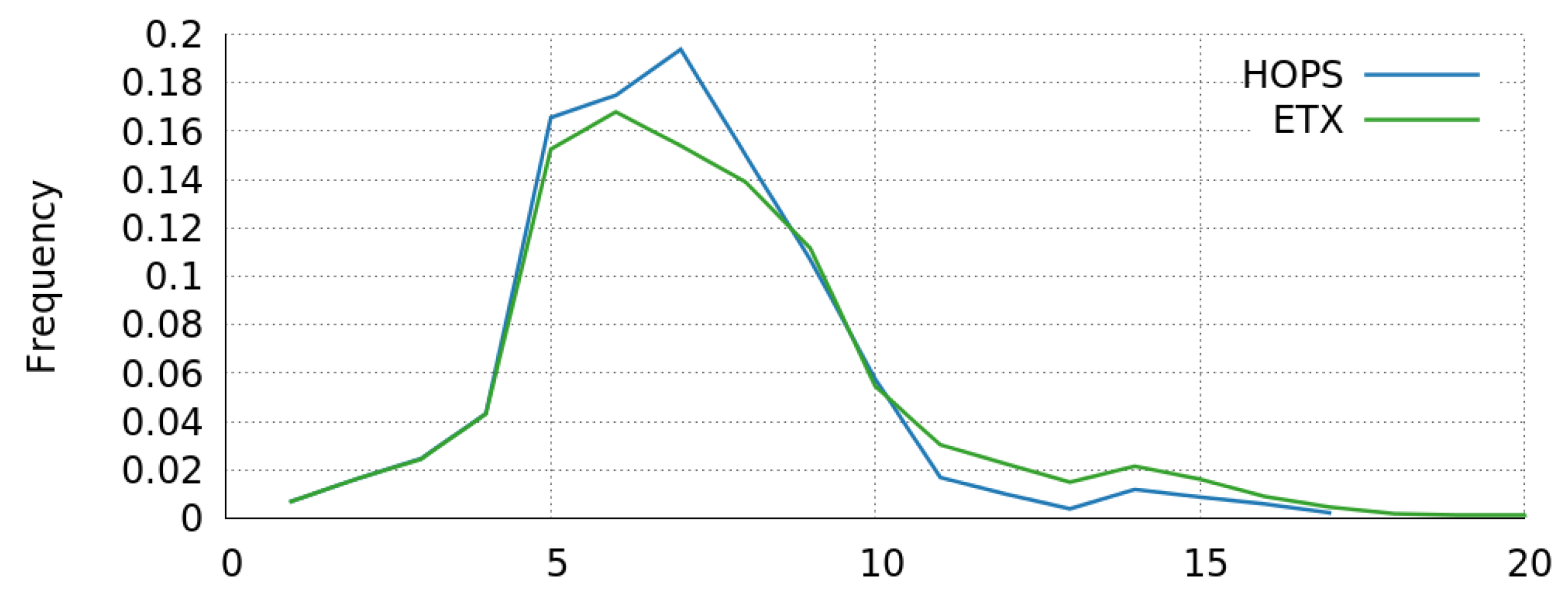
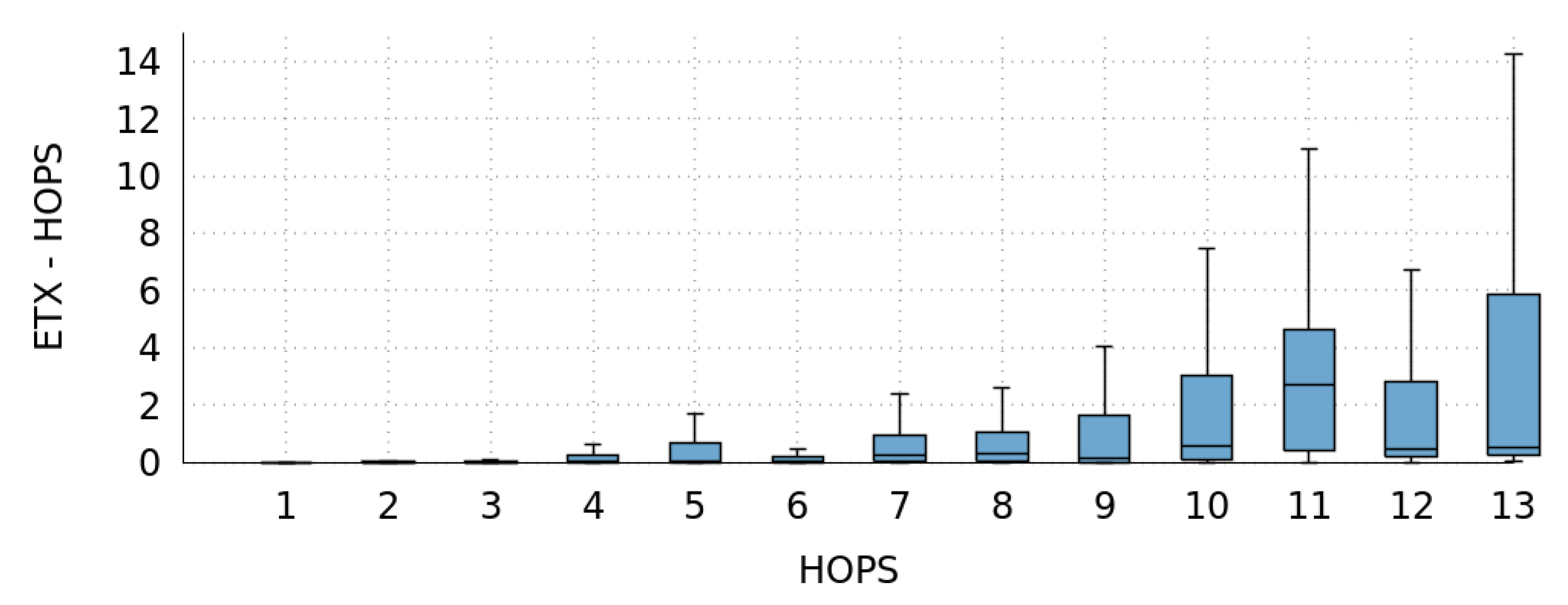
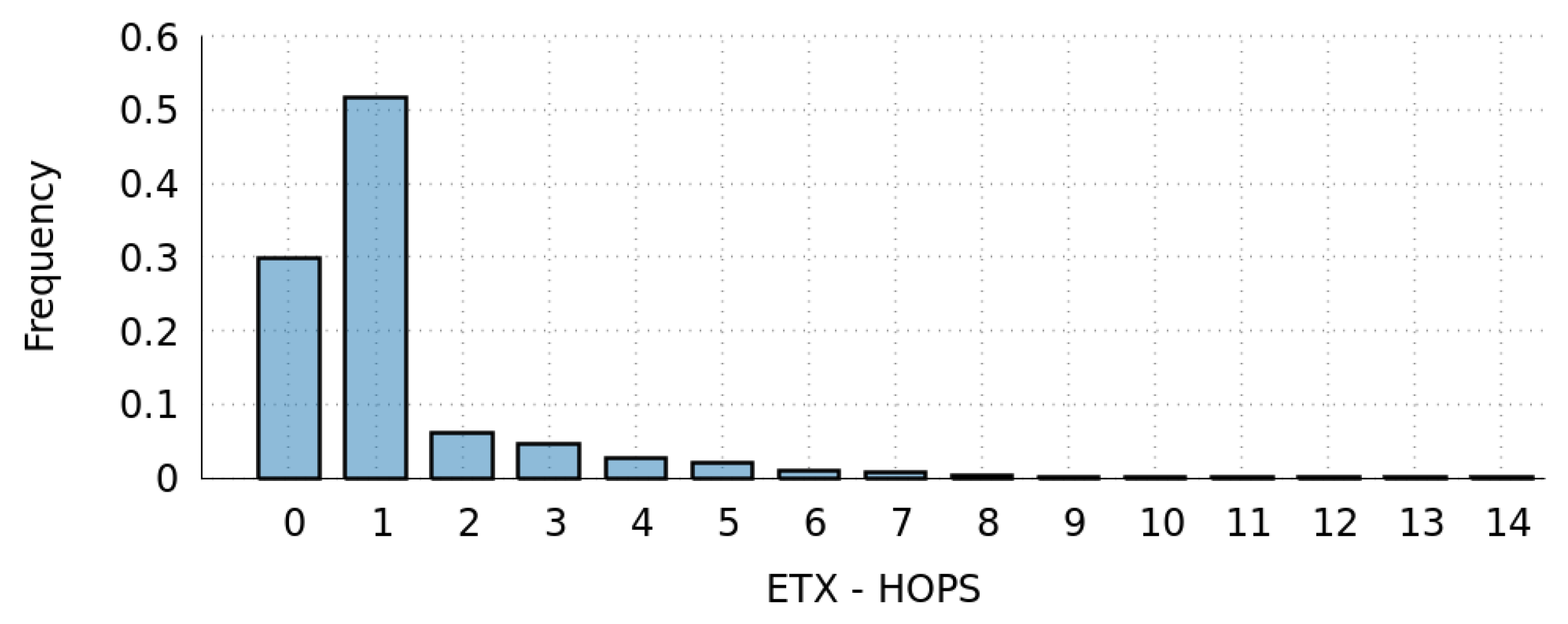
3.2.1. Path Behavior
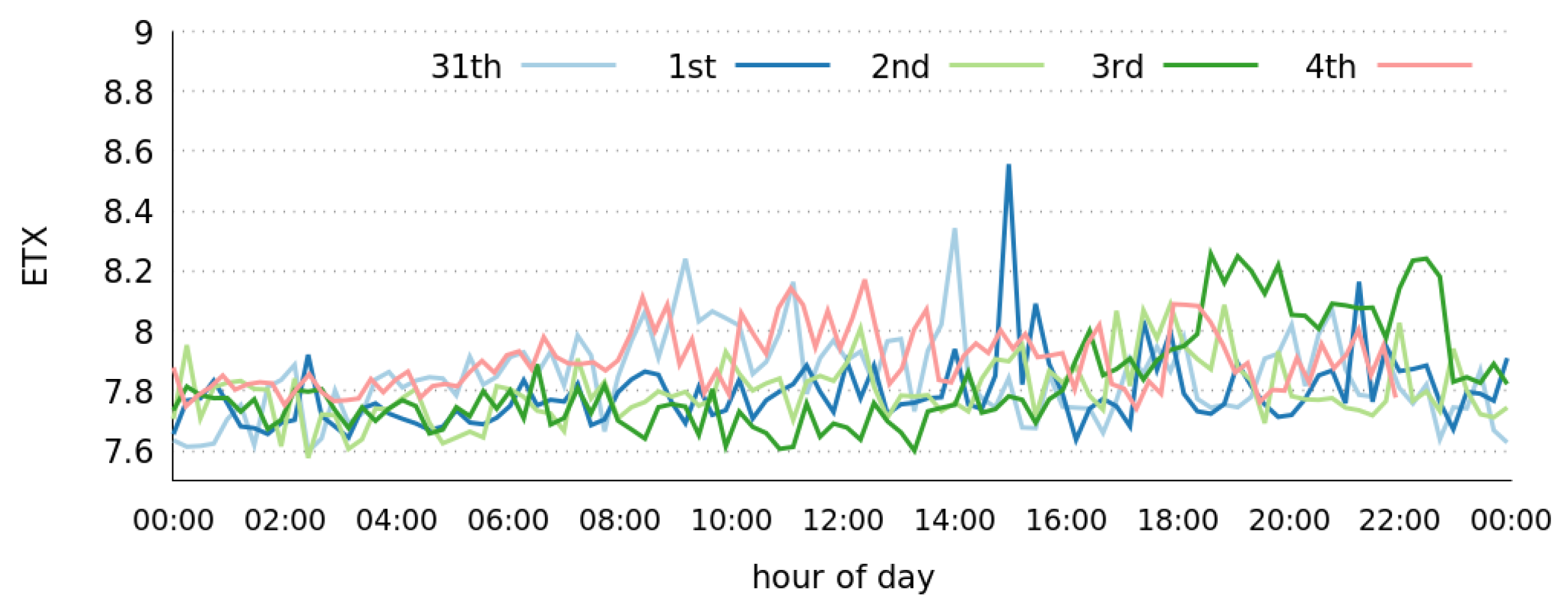
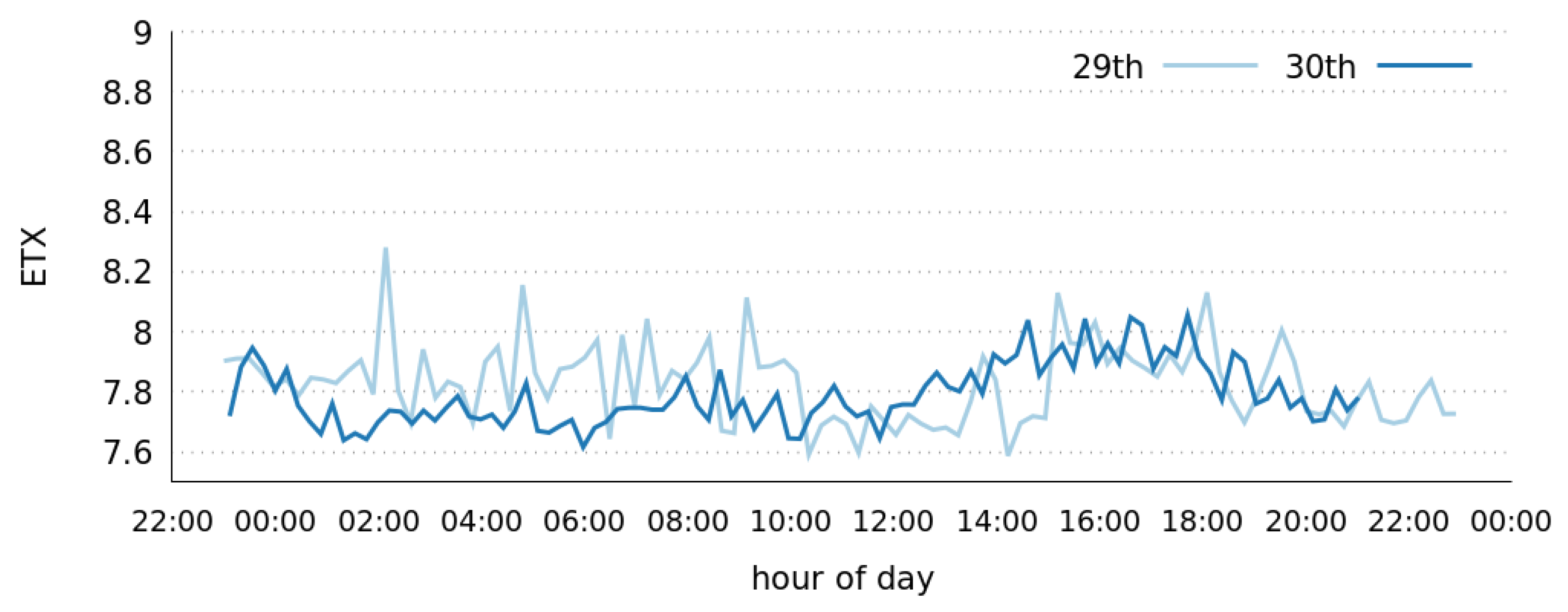
3.2.2. ETX Behavior
4. Time-Series Analysis to Predict EtEQ
4.1. Experimental Framework
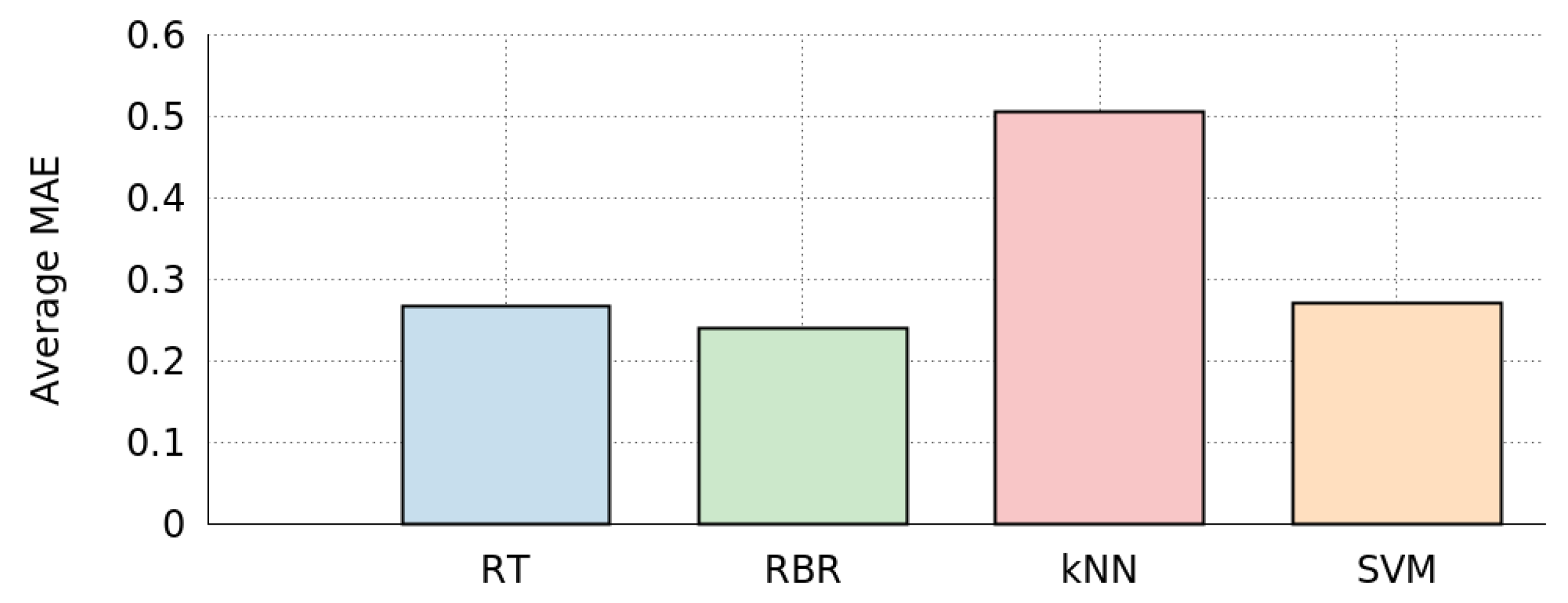
- The Support Vector Machine (SVM) algorithm has recently become one of the most popular and widely used methods in Machine Learning. It performs a linear or nonlinear division of the input space, and builds a prediction model that assigns target values into one or another category.
- The k-Nearest Neighbors (kNN) algorithm is one of the most simple Machine Learning algorithms as it makes no assumptions on the underlying data distribution. This algorithm takes the k data-points closest to the target value, and picks the most common one.
- Regression Tree (RT) is a type of decision-tree algorithm where the target value can have continuous values. This method recursively partitions the data space and runs a simple prediction model within each partition.
- Finally, the Rule-Based Regression (RBR) algorithm is similar to a decision-tree approach, but it is a stronger model that provides rules that are often potentially more predictive.
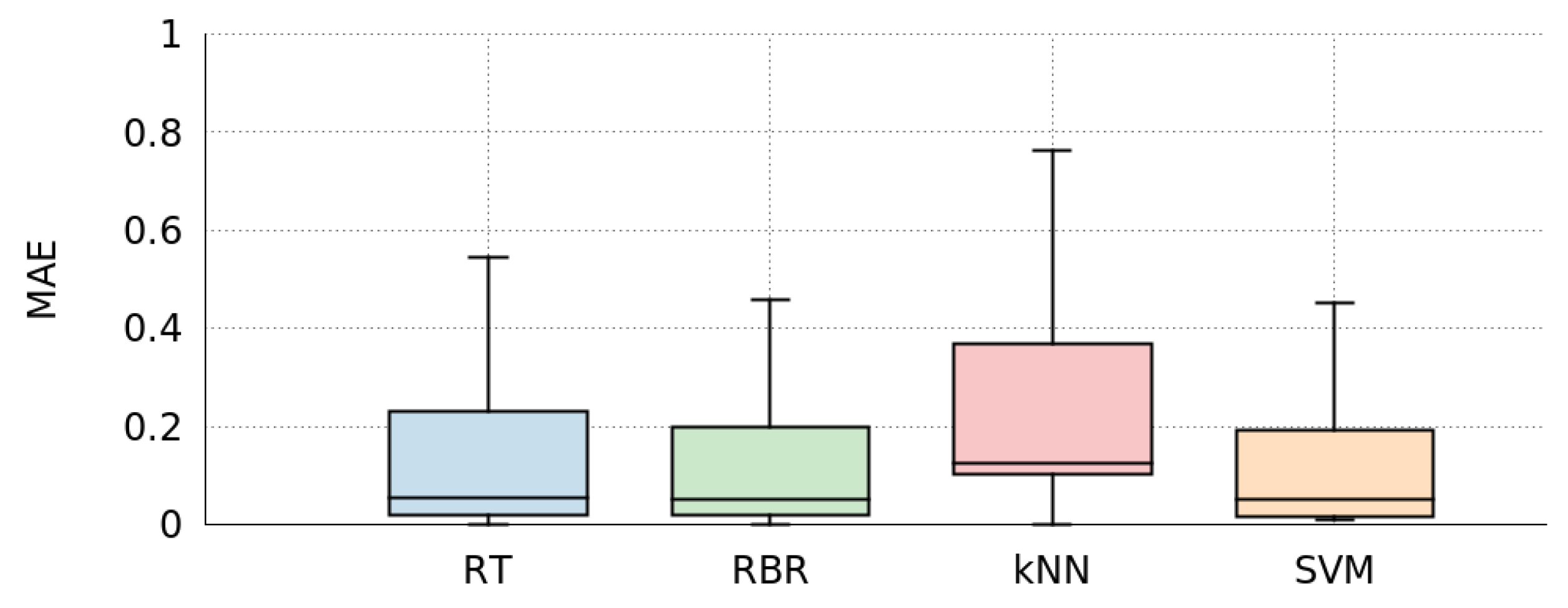
4.2. Comparison of Learning Algorithms Based on Time Series
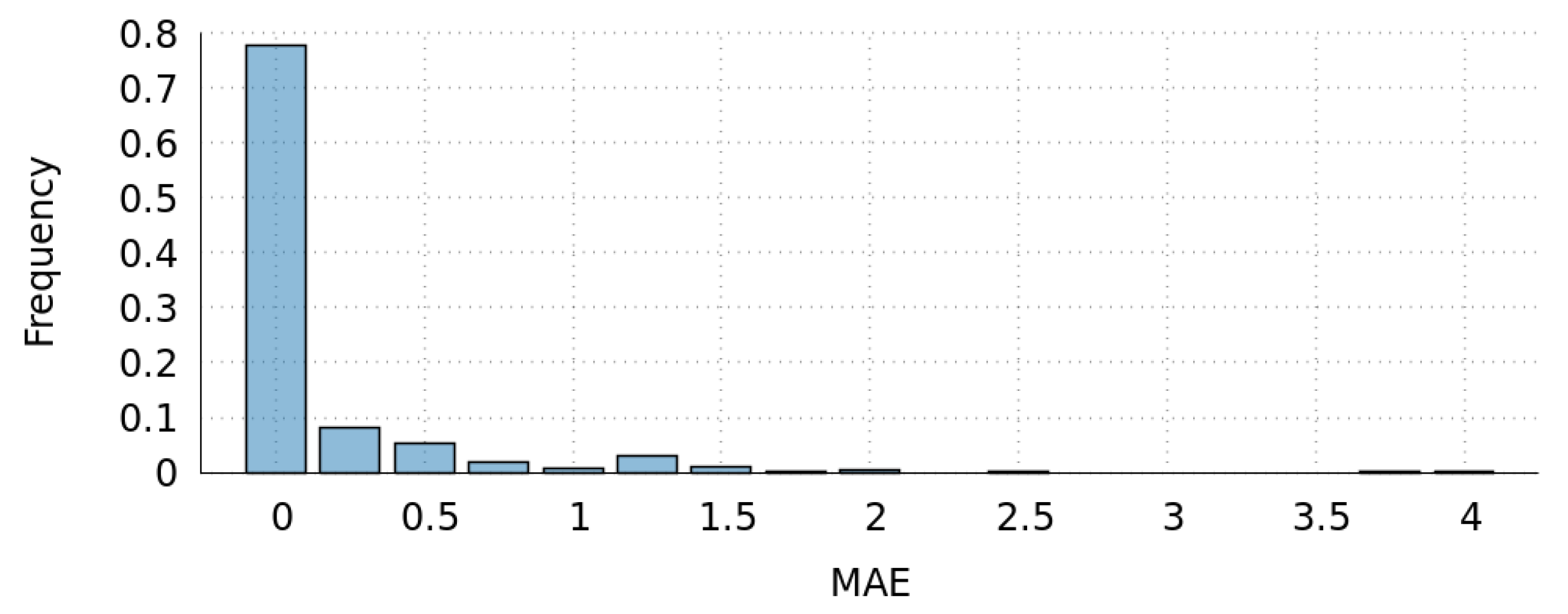
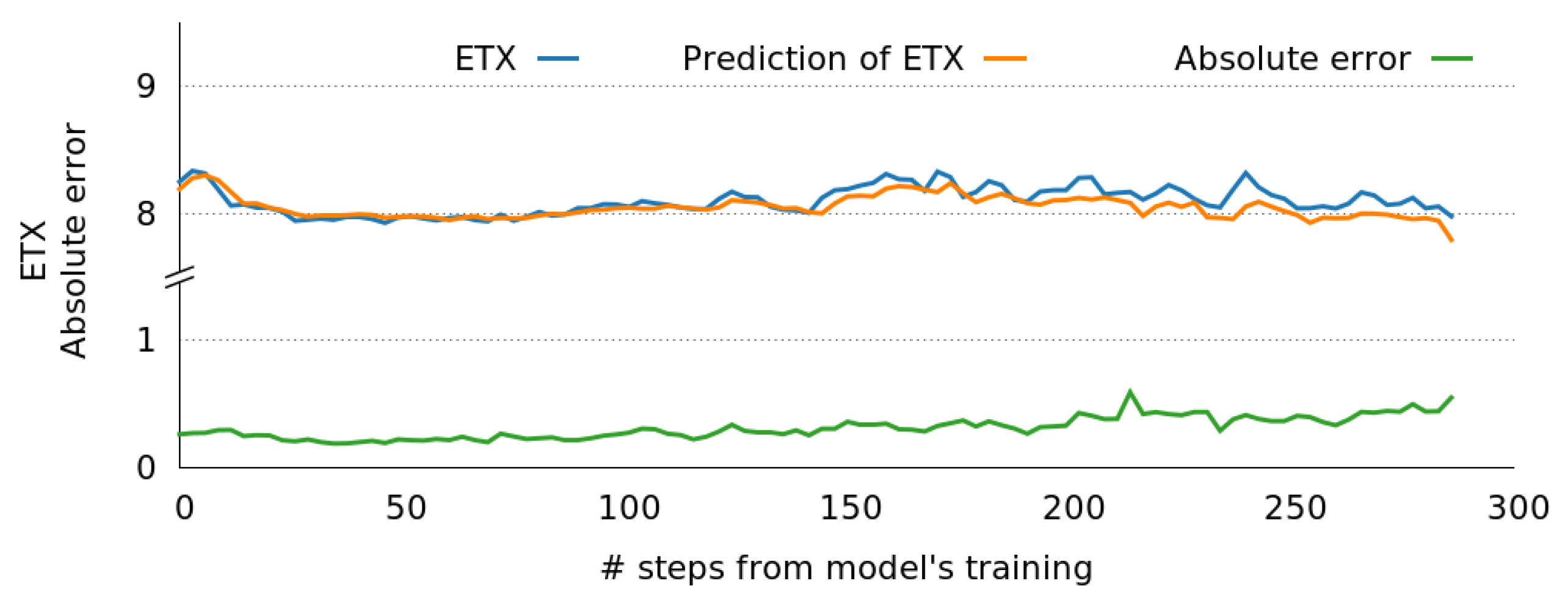
4.3. EtEQ Prediction with Rule-Based Regression
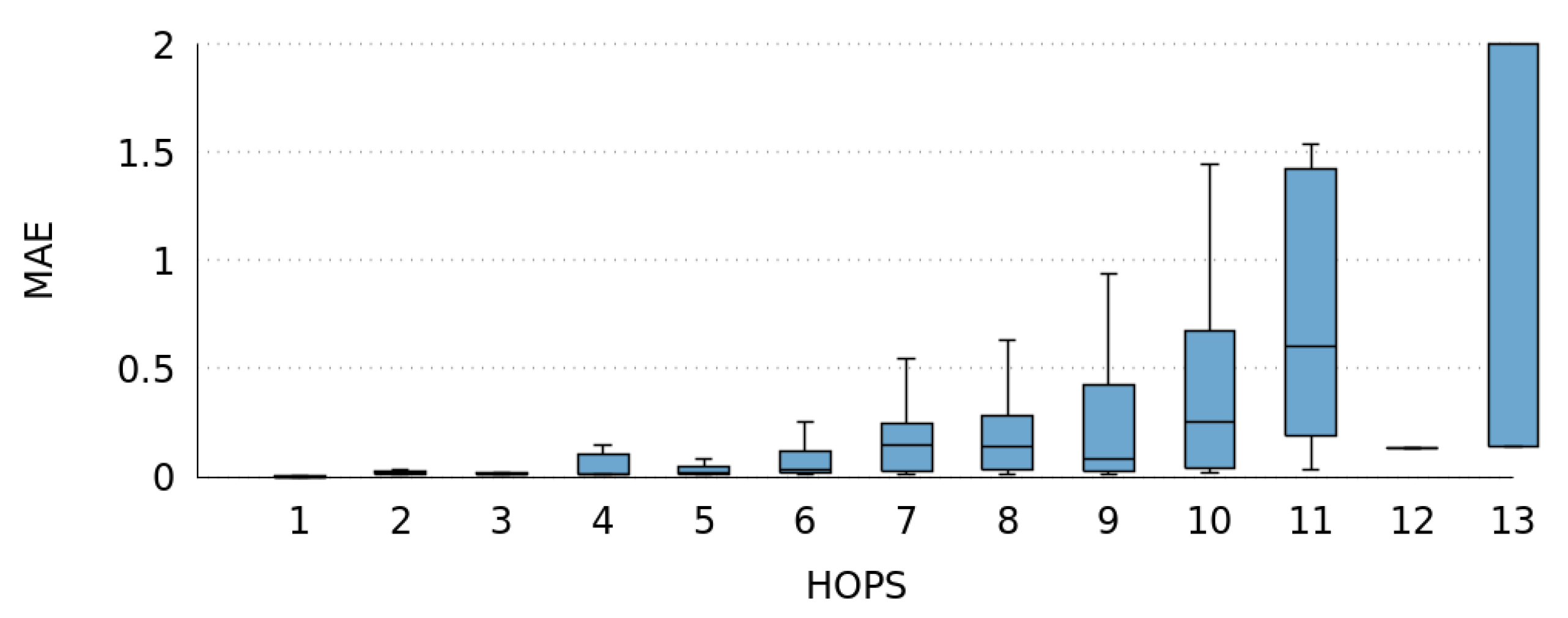
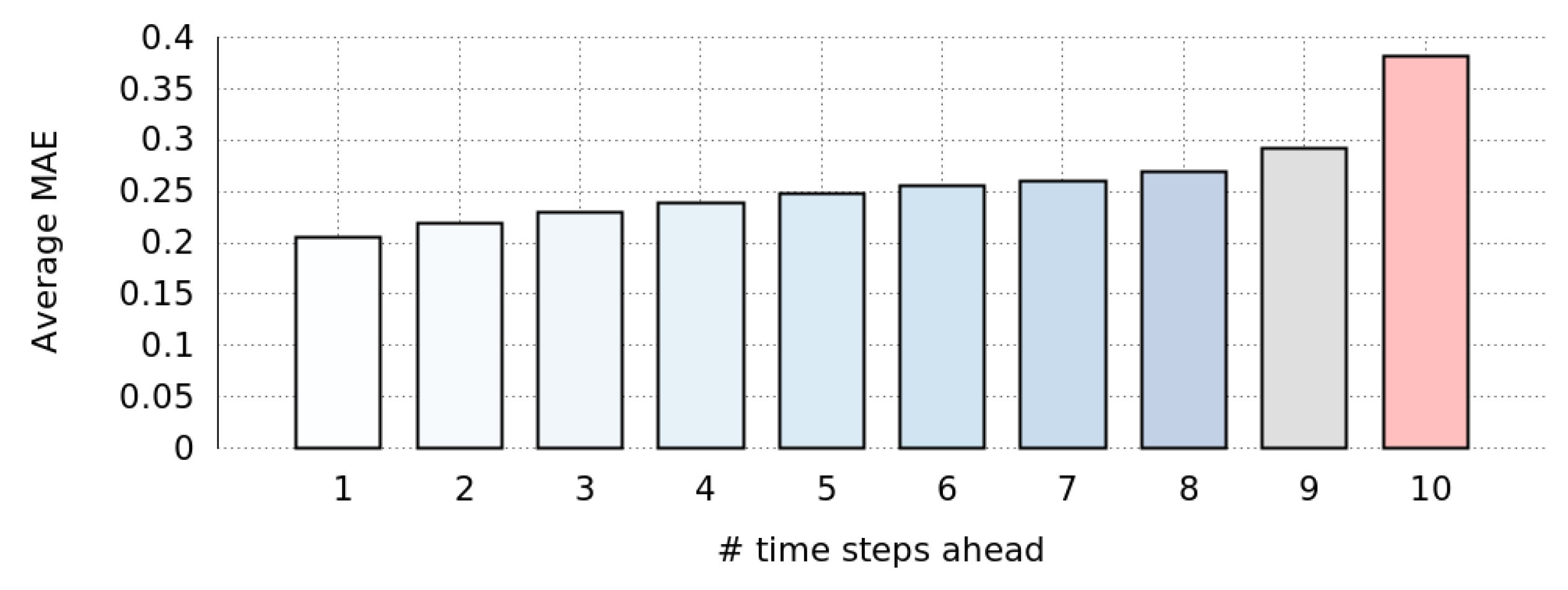
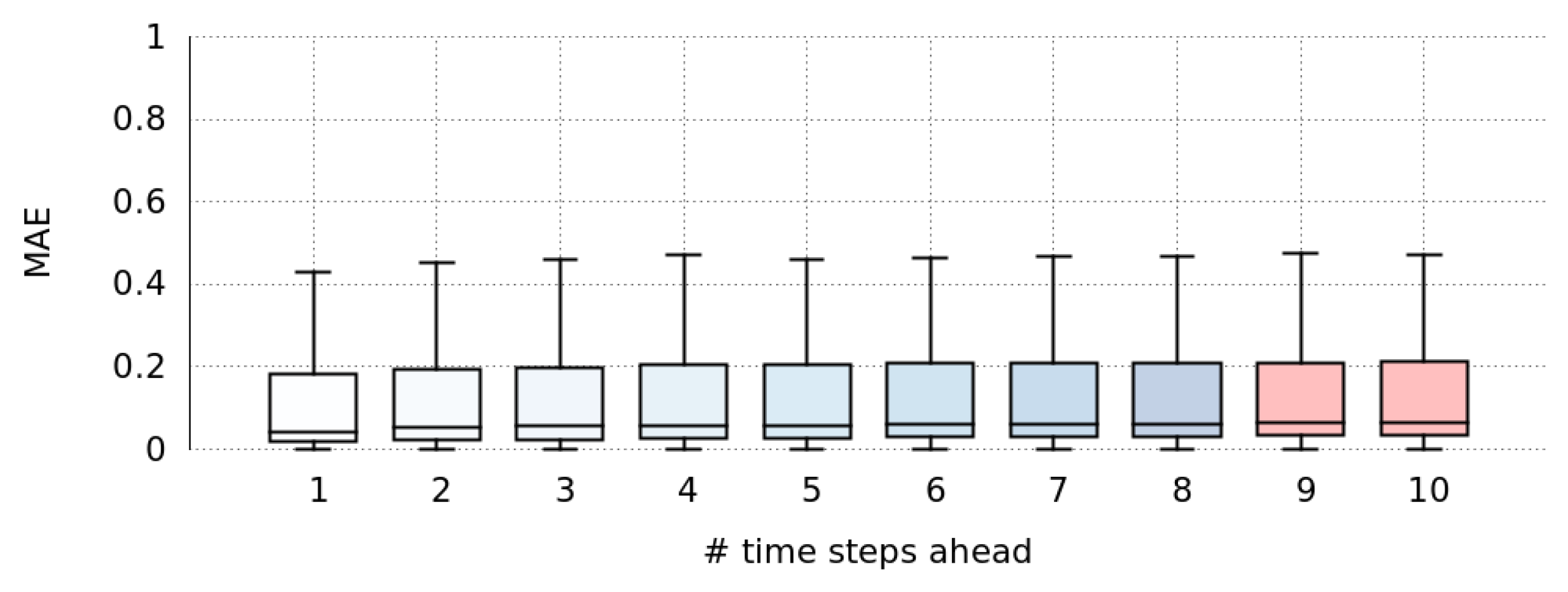
4.4. Prediction of Some Steps Ahead
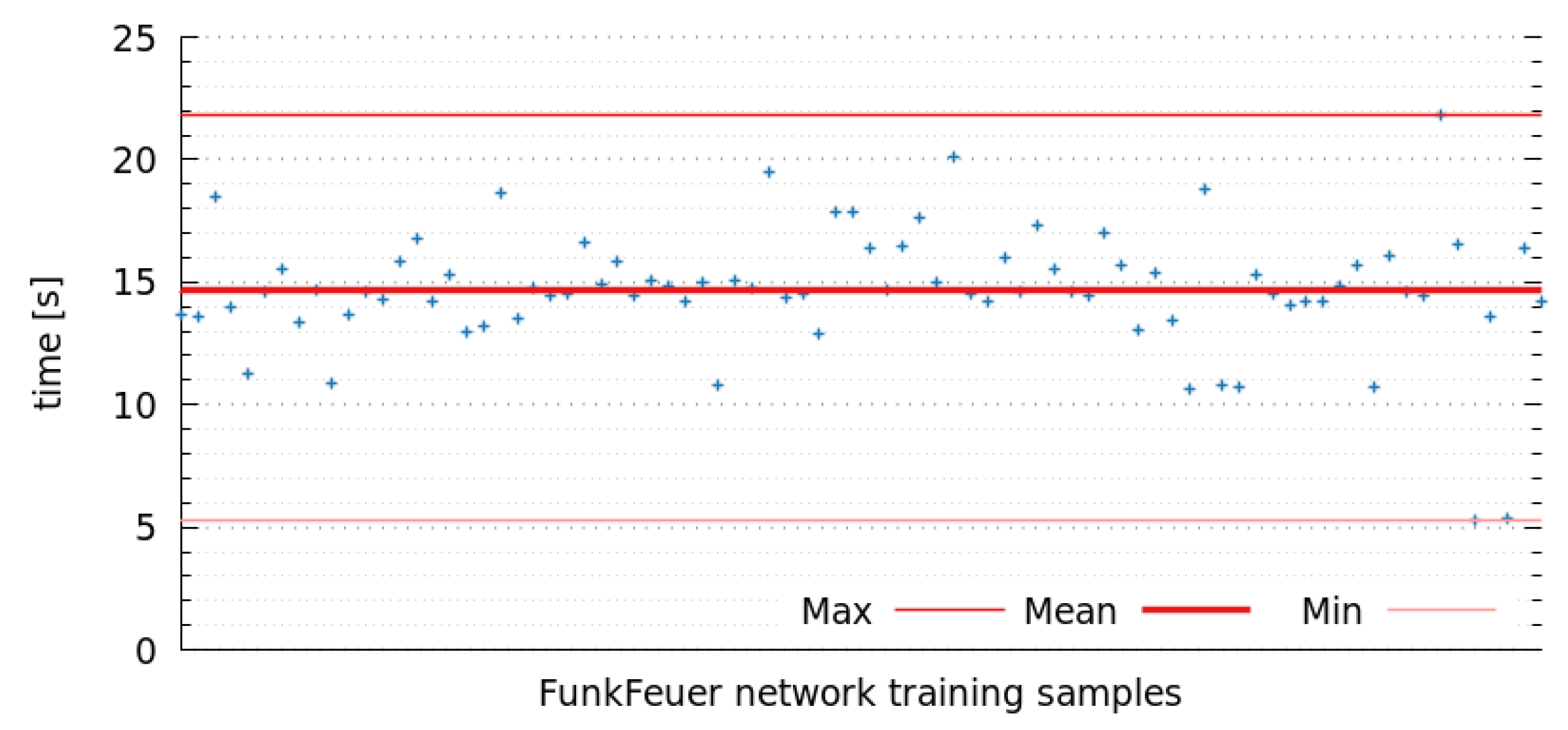
4.5. Computational Cost of the Predictions
5. Use Case Analysis
5.1. Experimental Framework
5.2. Analysis of Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- United Nations Internet Governance Forum. Community Networks: The Internet by the People, for the People. Official Outcome of the UN IGF Dynamic Coalition on Community Connectivity. 2017. Available online: http://hdl.handle.net/10438/19401 (accessed on 17 December 2018).
- Internet Society. Community Networks. 2018. Available online: https://www.internetsociety.org/issues/community-networks/ (accessed on 17 December 2018).
- Association for Progressive Communications (APC). APC Communiqué: Employment and Funding Opportunities for Strengthening Community Networks and Local Access. 2018. Available online: https://www.apc.org/en/news/apc-communique-employment-and-funding-opportunities-strengthening-community-networks-and-local (accessed on 17 December 2018).
- Avonts, J.; Braem, B.; Blondia, C. A questionnaire based examination of community networks. In Proceedings of the 2013 IEEE 9th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), Lyon, France, 7–9 October 2013; pp. 8–15. [Google Scholar] [CrossRef]
- Vega, D.; Baig, R.; Cerdà-Alabern, L.; Medina, E.; Meseguer, R.; Navarro, L. A technological overview of the guifi.net community network. Comput. Netw. 2015, 93, 260–278. [Google Scholar] [CrossRef]
- FunkFeuer Wien. FunkFeuer, a Free, Experimental Network in Vienna. 2003. Available online: https://www.funkfeuer.at/ (accessed on 19 February 2017).
- AWMN. Athens Wireless Metropolitan Network. 2010. Available online: http://www.awmn.net/ (accessed on 23 February 2018).
- Baig, R.; Roca, R.; Freitag, F.; Navarro, L. Guifi.net, a crowdsourced network infrastructure held in common. Comput. Netw. 2015, 90, 150–165. [Google Scholar] [CrossRef]
- Braem, B.; Blondia, C.; Barz, C.; Rogge, H.; Freitag, F.; Navarro, L.; Bonicioli, J.; Papathanasiou, S.; Escrich, P.; Baig Viñas, R.; et al. A Case for Research with and on Community Networks. SIGCOMM Comput. Commun. Rev. 2013, 43, 68–73. [Google Scholar] [CrossRef]
- Woo, A.; Tong, T.; Culler, D. Taming the Underlying Challenges of Reliable Multihop Routing in Sensor Networks. In Proceedings of the 1st international Conference on Embedded Networked Sensor Systems (SenSys), Los Angeles, CA, USA, 5–7 November 2003; pp. 14–27. [Google Scholar] [CrossRef]
- Draves, R.; Padhye, J.; Zill, B. Comparison of Routing Metrics for Static Multi-hop Wireless Networks. SIGCOMM Comput. Commun. Rev. 2004, 34, 133–144. [Google Scholar] [CrossRef]
- Koksal, C.E.; Balakrishnan, H. Quality-Aware Routing Metrics for Time-Varying Wireless Mesh Networks. IEEE J. Sel. Areas Commun. 2006, 24, 1984–1994. [Google Scholar] [CrossRef]
- Rault, T.; Bouabdallah, A.; Challal, Y. Energy efficiency in wireless sensor networks: A top-down survey. Comput. Netw. 2014, 67, 104–122. [Google Scholar] [CrossRef]
- Rodríguez-Covili, J.; Ochoa, S.F.; Pino, J.A.; Messeguer, R.; Medina, E.; Royo, D. A communication infrastructure to ease the development of mobile collaborative applications. J. Netw. Comput. Appl. 2011, 34, 1883–1893. [Google Scholar] [CrossRef]
- Vural, S.; Wei, D.; Moessner, K. Survey of Experimental Evaluation Studies for Wireless Mesh Network Deployments in Urban Areas Towards Ubiquitous Internet. IEEE Commun. Surv. Tutor. 2013, 15, 223–239. [Google Scholar] [CrossRef]
- Baccour, N.; Koubâa, A.; Mottola, L.; Zúñiga, M.A.; Youssef, H.; Boano, C.A.; Alves, M. Radio Link Quality Estimation in Wireless Sensor Networks: A Survey. ACM Trans. Sens. Netw. 2012, 8, 34:1–34:33. [Google Scholar] [CrossRef]
- Lü, L.; Zhou, T. Link prediction in complex networks: A survey. Phys. A Stat. Mech. Its Appl. 2011, 390, 1150–1170. [Google Scholar] [CrossRef]
- Trammell, B.; Smith, J.; Perrig, A. Adding Path Awareness to the Internet Architecture. IEEE Internet Comput. 2018, 22, 96–102. [Google Scholar] [CrossRef]
- Millan, P.; Molina, C.; Dimogerontakis, E.; Navarro, L.; Meseguer, R.; Braem, B.; Blondia, C. Tracking and Predicting End-to-End Quality in Wireless Community Networks. In Proceedings of the 2015 3rd International Conference on Future Internet of Things and Cloud (FiCloud), Rome, Italy, 24–26 August 2015; pp. 794–799. [Google Scholar] [CrossRef]
- Millan, P.; Molina, C.; Medina, E.; Vega, D.; Meseguer, R.; Braem, B.; Blondia, C. Tracking and Predicting Link Quality in Wireless Community Networks. In Proceedings of the 2014 IEEE 10th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), Larnaca, Cyprus, 8–10 October 2014; pp. 239–244. [Google Scholar] [CrossRef]
- Fadlullah, Z.M.; Tang, F.; Mao, B.; Kato, N.; Akashi, O.; Inoue, T.; Mizutani, K. State-of-the-art deep learning: Evolving machine intelligence toward tomorrow’s intelligent network traffic control systems. IEEE Commun. Surv. Tutor. 2017, 19, 2432–2455. [Google Scholar] [CrossRef]
- Xie, J.; Yu, F.R.; Huang, T.; Xie, R.; Liu, J.; Liu, Y. A survey of machine learning techniques applied to software defined networking (SDN): Research issues and challenges. IEEE Commun. Surv. Tutor. 2018, 21, 393–430. [Google Scholar] [CrossRef]
- Bote-Lorenzo, M.L.; Gómez-Sánchez, E.; Mediavilla-Pastor, C.; Asensio-Pérez, J.I. Online machine learning algorithms to predict link quality in community wireless mesh networks. Comput. Netw. 2018, 132, 68–80. [Google Scholar] [CrossRef]
- Meseguer, R.; Molina, C.; Ochoa, S.F.; Santos, R. Energy-Aware Topology Control Strategy for Human-Centric Wireless Sensor Networks. Sensors 2014, 14, 2619–2643. [Google Scholar] [CrossRef] [PubMed]
- Meseguer, R.; Molina, C.; Ochoa, S.F.; Santos, R. Reducing energy consumption in human-centric wireless sensor networks. In Proceedings of the IEEE Conference on Systems, Man, and Cybernetics (SMC), Seoul, Korea, 14–17 October 2012; pp. 1473–1478. [Google Scholar] [CrossRef]
- Härri, J.; Filali, F.; Bonnet, C. Kinetic Multipoint Relaying: Improvements Using Mobility Predictions. In IFIP International Working Conference on Active and Programmable Networks; Springer: Berlin/Heidelberg, Germany, 2009; pp. 224–229. [Google Scholar] [CrossRef]
- Maleki, M.; Dantu, K.; Pedram, M. Lifetime prediction routing in mobile ad hoc networks. In Proceedings of the 2003 IEEE Wireless Communications and Networking, New Orleans, LA, USA, 16–20 March 2003; Volume 2, pp. 1185–1190. [Google Scholar] [CrossRef]
- Kim, D.; Garcia-Luna-Aceves, J.J.; Obraczka, K.; Cano, J.C.; Manzoni, P. Routing mechanisms for mobile ad hoc networks based on the energy drain rate. IEEE Trans. Mob. Comput. 2003, 2, 161–173. [Google Scholar] [CrossRef]
- Luo, Y.; Wang, J.; Chen, S. An energy-efficient DSR routing protocol based on mobility prediction. In Proceedings of the Symposium on a World of Wireless, Mobile and Multimedia Networks (WoWMoM), Buffalo, NY, USA, 26–29 June 2006. [Google Scholar] [CrossRef]
- Fonseca, R.; Gnawali, O.; Jamieson, K.; Levis, P. Four-Bit Wireless Link Estimation. In Proceedings of the ACM Workshop on Hot Topics in Networks (HotNets), Atlanta, GA, USA, 14–15 November 2007. [Google Scholar]
- Ma, Y. Improving wireless link delivery ratio classification with packet SNR. In Proceedings of the 2005 IEEE International Conference on Electro Information Technology, Lincoln, NE, USA, 22–25 May 2005; p. 6. [Google Scholar] [CrossRef]
- Senel, M.; Chintalapudi, K.; Lal, D.; Keshavarzian, A.; Coyle, E.J. A Kalman Filter Based Link Quality Estimation Scheme for Wireless Sensor Networks. In Proceedings of the IEEE Global Telecommunications Conference (GLOBECOM), Washington, DC, USA, 26–30 November 2007; pp. 875–880. [Google Scholar] [CrossRef]
- Cerpa, A.; Wong, J.L.; Potkonjak, M.; Estrin, D. Temporal Properties of Low Power Wireless Links: Modeling and Implications on Multi-hop Routing. In Proceedings of the Symposium on Mobile Ad Hoc Networking and Computing (MobiHoc), Champaign, IL, USA, 25–27 May 2005; ACM: New York, NY, USA, 2005; pp. 414–425. [Google Scholar] [CrossRef]
- De Couto, D.S.J.; Aguayo, D.; Bicket, J.; Morris, R. A High-throughput Path Metric for Multi-hop Wireless Routing. In Proceedings of the Conference on Mobile Computing and Networking (MobiCom), San Diego, CA, USA, 14–19 September 2003; ACM: New York, NY, USA, 2003; pp. 134–146. [Google Scholar] [CrossRef]
- Renner, C.; Ernst, S.; Weyer, C.; Turau, V. Prediction Accuracy of Link-Quality Estimators. In Wireless Sensor Networks; Springer: Berlin/Heidelberg, Germany, 2011; pp. 1–16. [Google Scholar]
- Passos, D.; Albuquerque, C.V.N. A Joint Approach to Routing Metrics and Rate Adaptation in Wireless Mesh Networks. IEEE/ACM Trans. Netw. 2012, 20, 999–1009. [Google Scholar] [CrossRef]
- Banerjee, S.; Misra, A. Minimum Energy Paths for Reliable Communication in Multi-hop Wireless Networks. In Proceedings of the Symposium on Mobile Ad Hoc Networking & Computing (MobiHoc), Lausanne, Switzerland, 9–11 June 2002; ACM: New York, NY, USA, 2002; pp. 146–156. [Google Scholar] [CrossRef]
- Jakllari, G.; Eidenbenz, S.; Hengartner, N.; Krishnamurthy, S.V.; Faloutsos, M. Link Positions Matter: A Noncommutative Routing Metric for Wireless Mesh Network. In Proceedings of the IEEE Conference on Computer Communications (INFOCOM), Rio de Janeiro, Brazil, 29 August 2008; pp. 744–752. [Google Scholar] [CrossRef]
- Li, H.; Cheng, Y.; Zhou, C.; Zhuang, W. Minimizing End-to-End Delay: A Novel Routing Metric for Multi-Radio Wireless Mesh Networks. In Proceedings of the IEEE Conference on Computer Communications (INFOCOM), Rio de Janeiro, Brazil, 19–25 April 2009; pp. 46–54. [Google Scholar] [CrossRef]
- Wang, Y.; Martonosi, M.; Peh, L.S. A New Scheme on Link Quality Prediction and Its Applications to Metric-based Routing. In Proceedings of the Conference on Embedded Networked Sensor Systems (SenSys), San Diego, CA, USA, 2–4 November 2005; pp. 288–289. [Google Scholar] [CrossRef]
- Maccari, L.; Cigno, R.L. A week in the life of three large Wireless Community Networks. Ad Hoc Netw. 2015, 24, 175–190. [Google Scholar] [CrossRef]
- Cunha, I.; Teixeira, R.; Veitch, D.; Diot, C. Predicting and Tracking Internet Path Changes. SIGCOMM Comput. Commun. Rev. 2011, 41, 122–133. [Google Scholar] [CrossRef]
- Lowrance, C.J.; Lauf, A.P. Link Quality Estimation in Ad Hoc and Mesh Networks: A Survey and Future Directions. Wirel. Pers. Commun. 2017, 96, 475–508. [Google Scholar] [CrossRef]
- Azzouni, A.; Boutaba, R.; Pujolle, G. NeuRoute: Predictive dynamic routing for software-defined networks. In Proceedings of the Conference on Network and Service Management, CNSM, Tokyo, Japan, 26–30 November 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Sendra, S.; Rego, A.; Lloret, J.; Jiménez, J.M.; Romero, Ó. Including artificial intelligence in a routing protocol using Software Defined Networks. In Proceedings of the Conference on Communications Workshops, Paris, France, 21–25 May 2017; pp. 670–674. [Google Scholar] [CrossRef]
- Lin, S.; Akyildiz, I.F.; Wang, P.; Luo, M. QoS-Aware Adaptive Routing in Multi-layer Hierarchical Software Defined Networks: A Reinforcement Learning Approach. In Proceedings of the Conference on Services Computing SCC, San Francisco, CA, USA, 27 June–2 July 2016; pp. 25–33. [Google Scholar] [CrossRef]
- Azzouni, A.; Pujolle, G. NeuTM: A neural network-based framework for traffic matrix prediction in SDN. In Proceedings of the Network Operations and Management Symposium, NOMS, Taipei, Taiwan, 23–27 April 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Millán, P.; Molina, C.; Medina, E.; Vega, D.; Meseguer, R.; Braem, B.; Blondia, C. Time Series Analysis to Predict Link Quality of Wireless Community Networks. Comput. Netw. 2015, 93, 342–358. [Google Scholar] [CrossRef]
- Clausen, T.; Dearlove, C.; Jacquet, P.; Herberg, U. The Optimized Link State Routing Protocol Version 2. RFC 7181. 2014. Available online: https://www.rfc-editor.org/rfc/rfc7181.txt (accessed on 20 April 2019).
- Clausen, T.; Jacquet, P. Optimized Link State Routing Protocol (OLSR). RFC 3626. 2003. Available online: https://www.rfc-editor.org/rfc/rfc3626.txt (accessed on 20 April 2019).
- Alsheikh, M.A.; Lin, S.; Niyato, D.; Tan, H.P. Machine Learning in Wireless Sensor Networks: Algorithms, Strategies, and Applications. IEEE Commun. Surv. Tutor. 2014, 16, 1996–2018. [Google Scholar] [CrossRef]
- Hall, M.; Frank, E.; Holmes, G.; Pfahringer, B.; Reutemann, P.; Witten, I.H. The WEKA Data Mining Software: An Update. ACM SIGKDD Explor. Newsl. 2009, 11, 10–18. [Google Scholar] [CrossRef]
- Jetway Computer Corp. JBC372F36. 2012. Available online: https://www.jetwaycomputer.com/JBC372F36.html (accessed on 11 January 2019).
- Little, M. JavaSim. 2018. Available online: https://github.com/nmcl/JavaSim (accessed on 19 February 2019).
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tools | Version |
|---|---|
| Weka | version 3.7.10 |
| TimeseriesForecasting | version 1.1.25 |
| Algorithm | Class |
| RT | weka.classifiers.trees.M5P |
| RBR | weka.classifiers.rules.M5Rules |
| kNN | weka.classifiers.lazy.IBk |
| SVM | weka.classifiers.functions.SMOreg |
| Algorithm | Parameters |
| RT | -M 4.0 |
| RBR | -M 4.0 |
| kNN | -K 1 -W 0 -A “weka.core.EuclideanDistance -R first-last” |
| SVM | -I “weka.classifiers.functions.supportVector.RegSMOImproved -L 0.001 > -W 1 -P 1.0E-12 -T 0.001 -V” -K “weka.classifiers.functions.supportVector.PolyKernel -C 250007 -E 1.0” -N 0 |
| 1 Packet Every 100 Slots | 1 Packet Every 10 Slots | 1 Packet Every 1 Slots | |
|---|---|---|---|
| ETX + Dijkstra | 1.0 | 0.98 | 0.44 |
| End-to-End Quality Prediction | 1.0 | 0.98 | 0.54 |
| None | Uniform 10 | Uniform 2 | Pareto 10 | Pareto 2 | |
|---|---|---|---|---|---|
| ETX + Dijkstra | 1.0 | 0.99 | 0.91 | 1.0 | 0.89 |
| End-to-End Quality Prediction | 1.0 | 0.98 | 0.90 | 1.0 | 0.89 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Millan, P.; Aliagas, C.; Molina, C.; Dimogerontakis, E.; Meseguer, R. Time Series Analysis to Predict End-to-End Quality of Wireless Community Networks. Electronics 2019, 8, 578. https://doi.org/10.3390/electronics8050578
Millan P, Aliagas C, Molina C, Dimogerontakis E, Meseguer R. Time Series Analysis to Predict End-to-End Quality of Wireless Community Networks. Electronics. 2019; 8(5):578. https://doi.org/10.3390/electronics8050578
Chicago/Turabian StyleMillan, Pere, Carles Aliagas, Carlos Molina, Emmanouil Dimogerontakis, and Roc Meseguer. 2019. "Time Series Analysis to Predict End-to-End Quality of Wireless Community Networks" Electronics 8, no. 5: 578. https://doi.org/10.3390/electronics8050578
APA StyleMillan, P., Aliagas, C., Molina, C., Dimogerontakis, E., & Meseguer, R. (2019). Time Series Analysis to Predict End-to-End Quality of Wireless Community Networks. Electronics, 8(5), 578. https://doi.org/10.3390/electronics8050578