Design of Robust Fuzzy Logic Controller Based on the Levenberg Marquardt Algorithm and Fault Ride Trough Strategies for a Grid-Connected PV System


 ,
,  ,
,  ,
,  and
and 
Abstract
:1. Introduction
- 1)
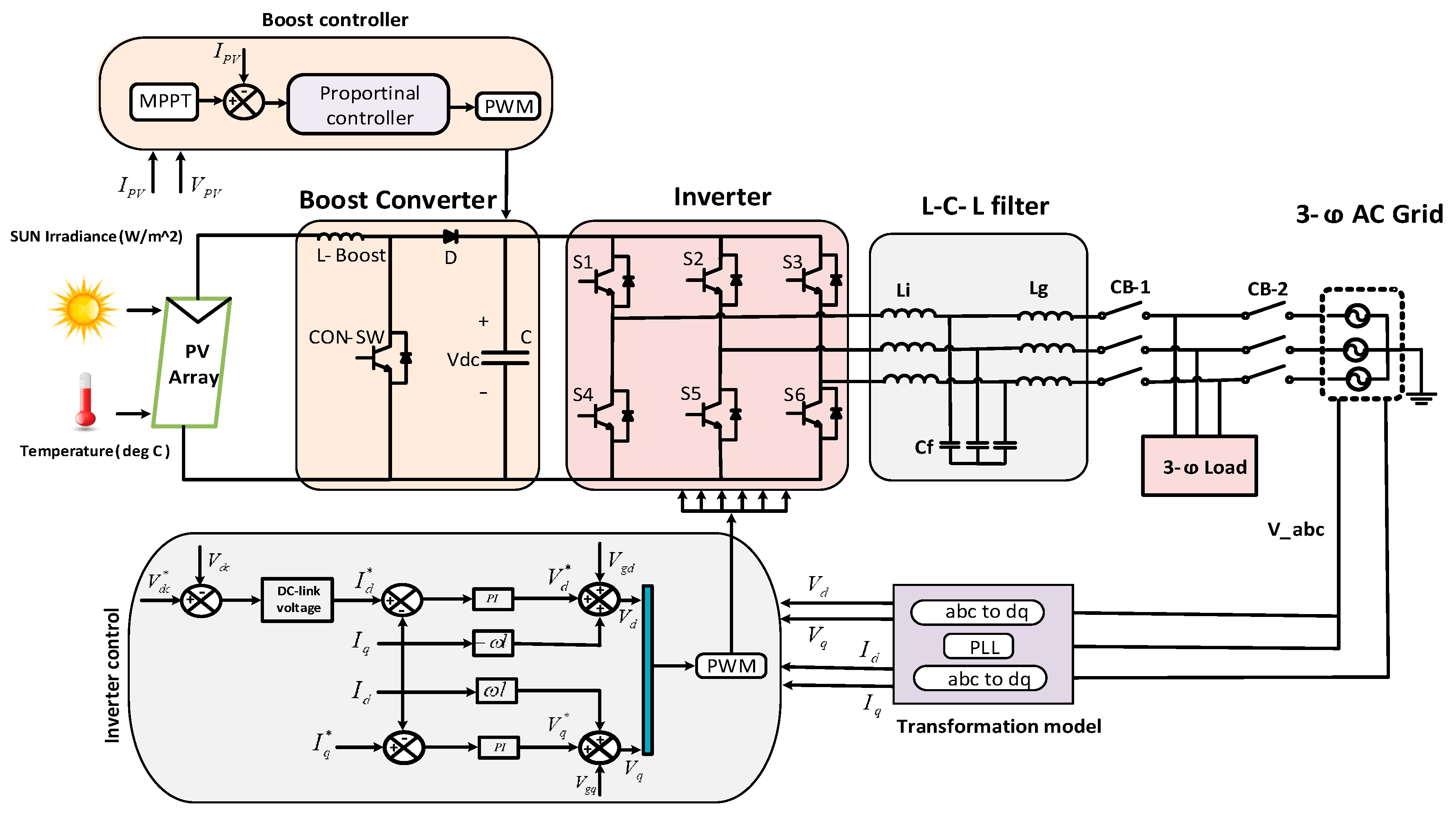
- A 100kW MATLAB/Simulink model of photovoltaic system is used for simulation at both the grid side and the PV side variables and dc-link voltage are kept within optimum limits during asymmetrical faults at PCC. Moreover, the proposed strategy is employed at 5 km from PCC to investigate the variations due to the distribution line impedance during the fault.
- 2)
- A novel bridge-type-fault-current limiter (BFCL) strategy is employed to strengthen the LVRT capability of three-phase grid connected PVS comfortably.
- 3)
- A comprehensive and keen comparison of conventional-crowbar circuitry with the BFCL strategy is performed to authenticate the optimized and smooth response of the system variable with the BFCL strategy.
- 4)
- LM is designed and compared precisely with a previously adopted conventional PI controller. Due to the robust nature, the LM optimization-based controller is fast and always convergent.
- 5)
- Unbalance faults are applied for 0.15 s to verify the fault-tolerant capability of the proposed LM in coordination with BFCL when compared to a conventional PI and crowbar strategy.
- 6)
- Performance evaluation analysis is performed to verify stability of the proposed controller and strategy i.e., Integral-Absolute-Error (IAE), Integral-Square-Error (ISE), and Integral of Time-Weighted-Absolute-Error (ITAE).
- 7)
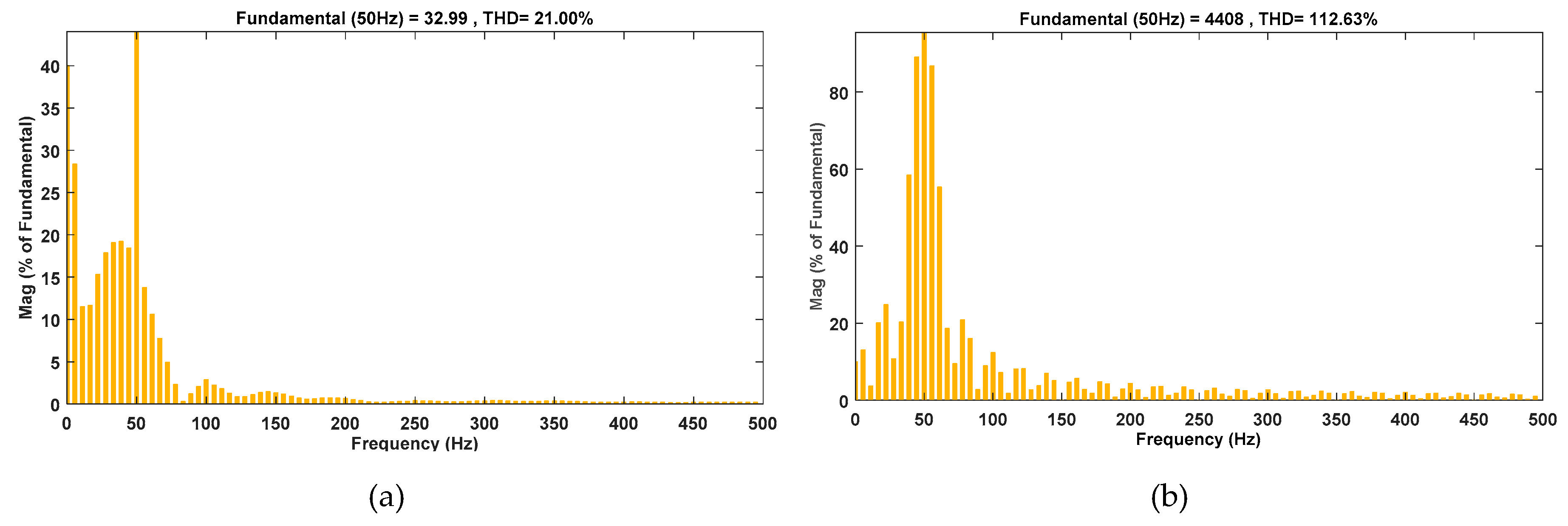
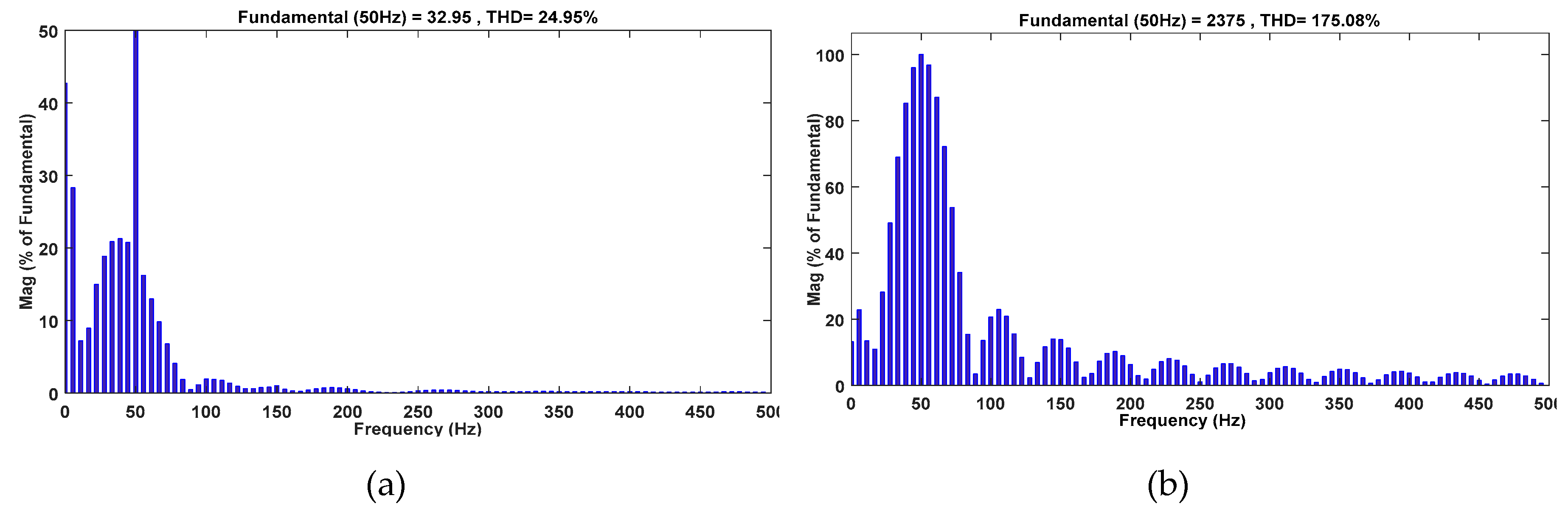
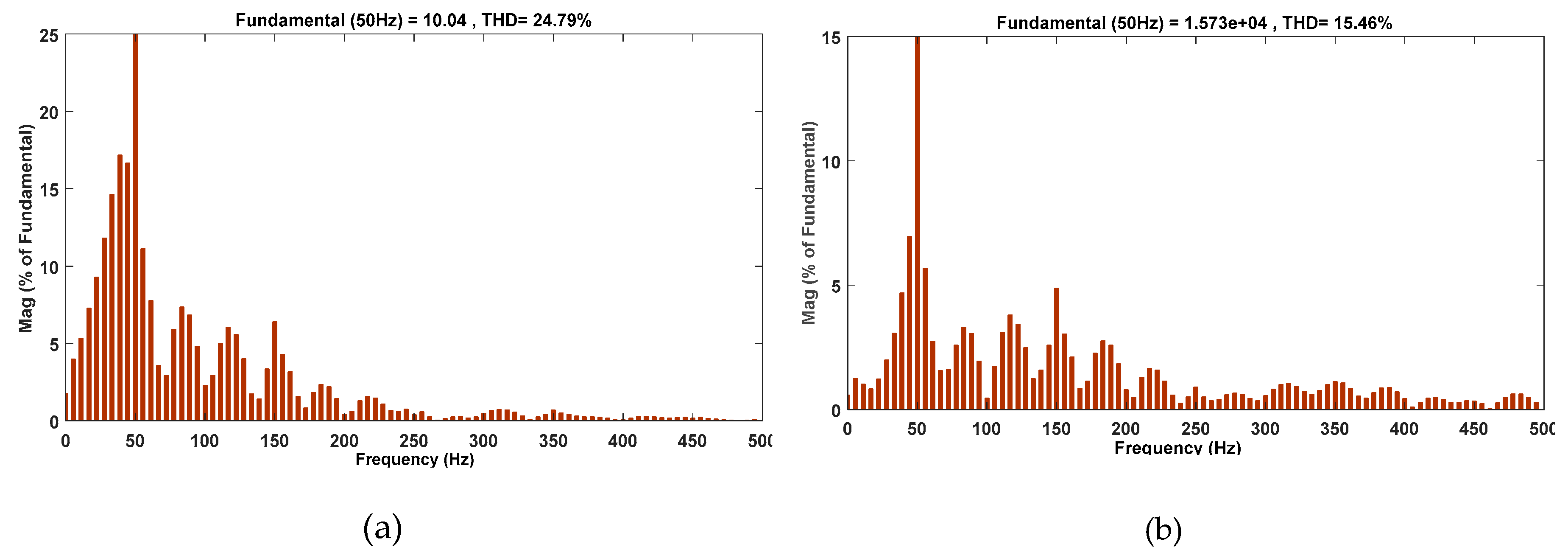
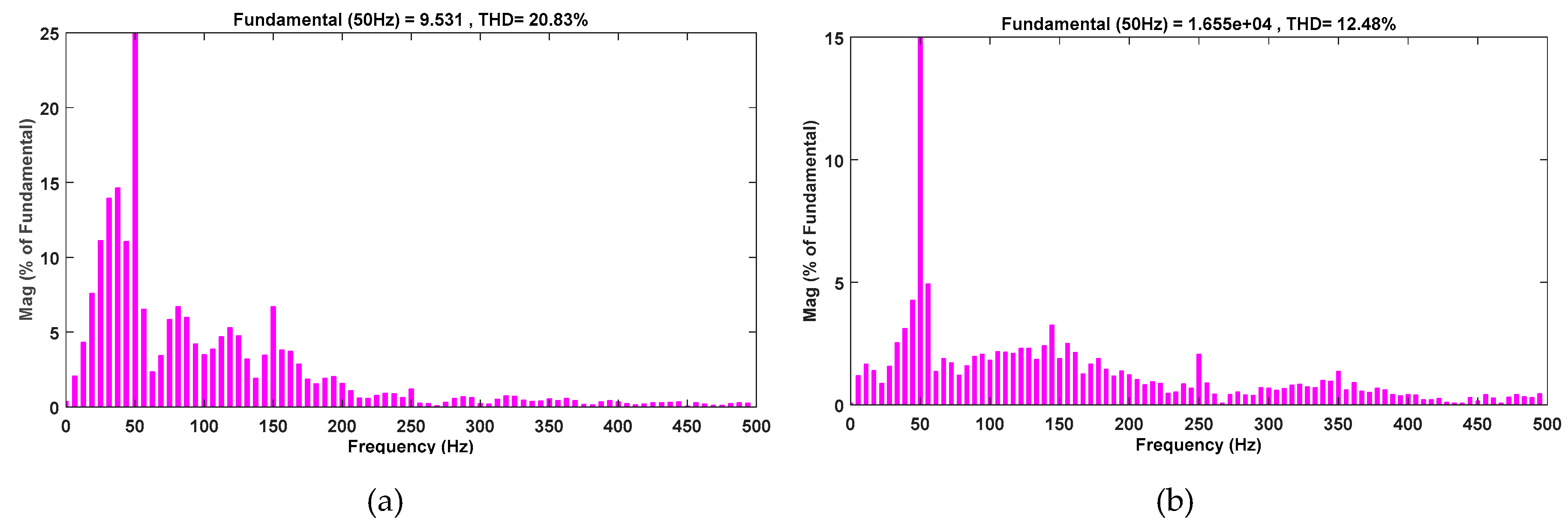
- Total harmonic distortion (THD) is calculated using fast fourier transform (FFT) analysis for grid current and voltage to validate the robustness of the proposed approach.
2. Mathematical Modeling
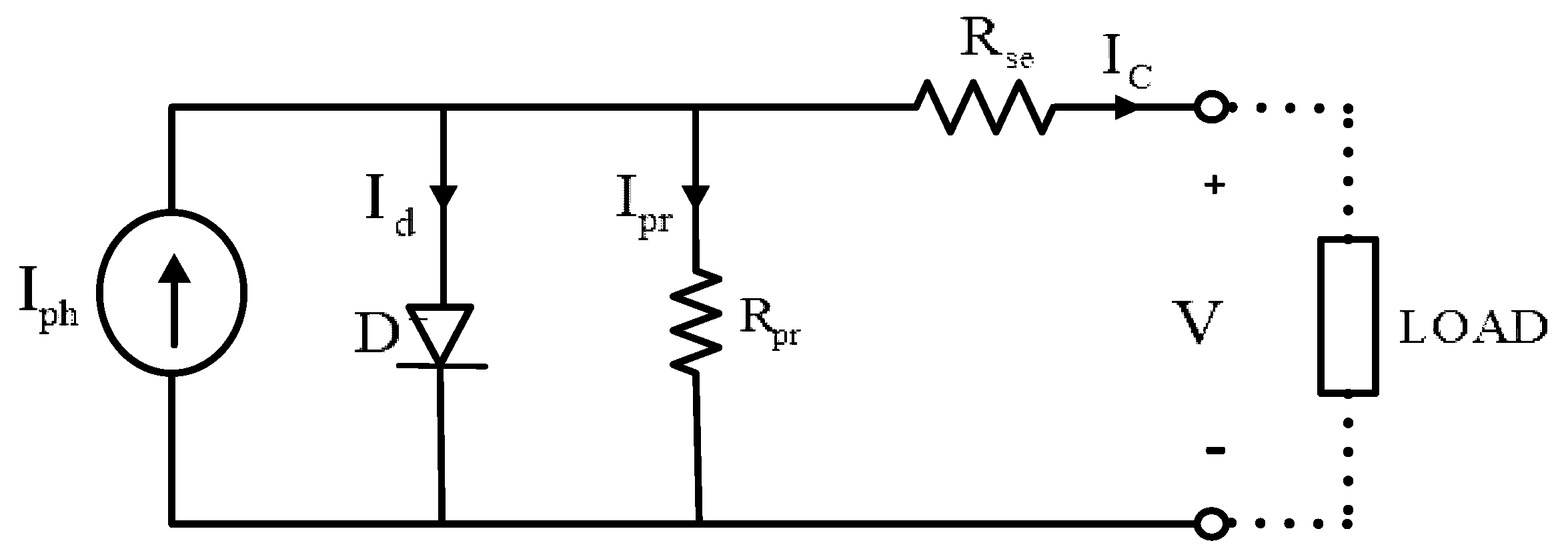
2.1. Mathematical Modeling of the PV Cell
- : Output current (A) of PV cell
- : Reverse saturation current of diode = 5.261 × 10−9 A
- : Insulation current = 5.958 A
- 0.0831 ohms
- 8192 ohms
- : Thermal voltage, calculated by Equation (3) below.
- : Absolute Temperature = 25 °C
- Quality factor of diode = 1.25
- Charge of electron = 1.602 × 10−19 C
- Number of parallel strings = 66
- Number of series-connected modules/string = 5
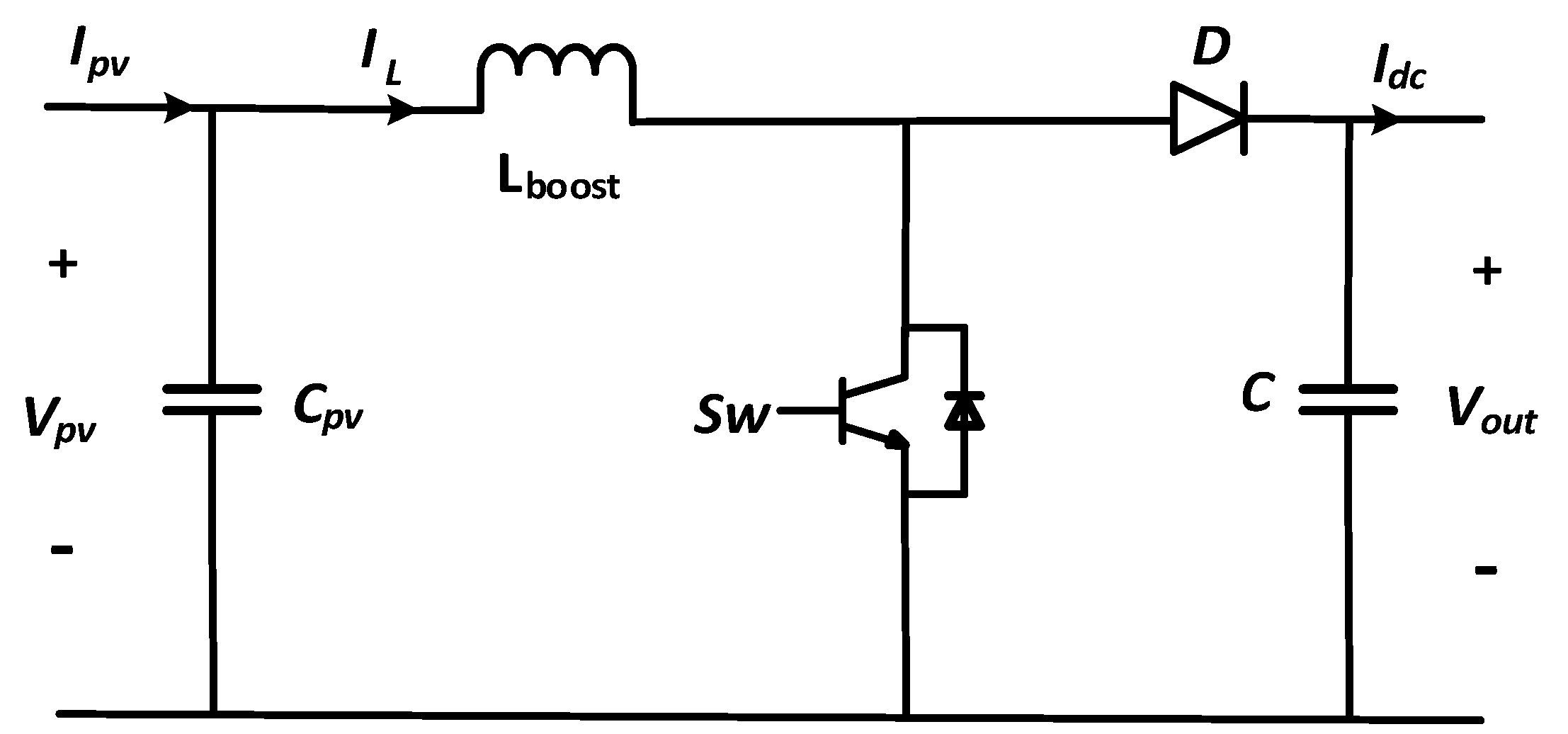
2.2. Mathematical Modeling of the DC-to-DC Boost-Converter
- D: Duty Cycle of Boost-Converter.
- VPV: Input voltage for boost-converter = 273 V.
- Switching frequency of boost converter = 5 KHz.
- Boost inductor = 5 mH.
- : Boost converter output voltage = 500 V.
2.3. Mathematical Modeling of Inverter
2.4. Proposed Model
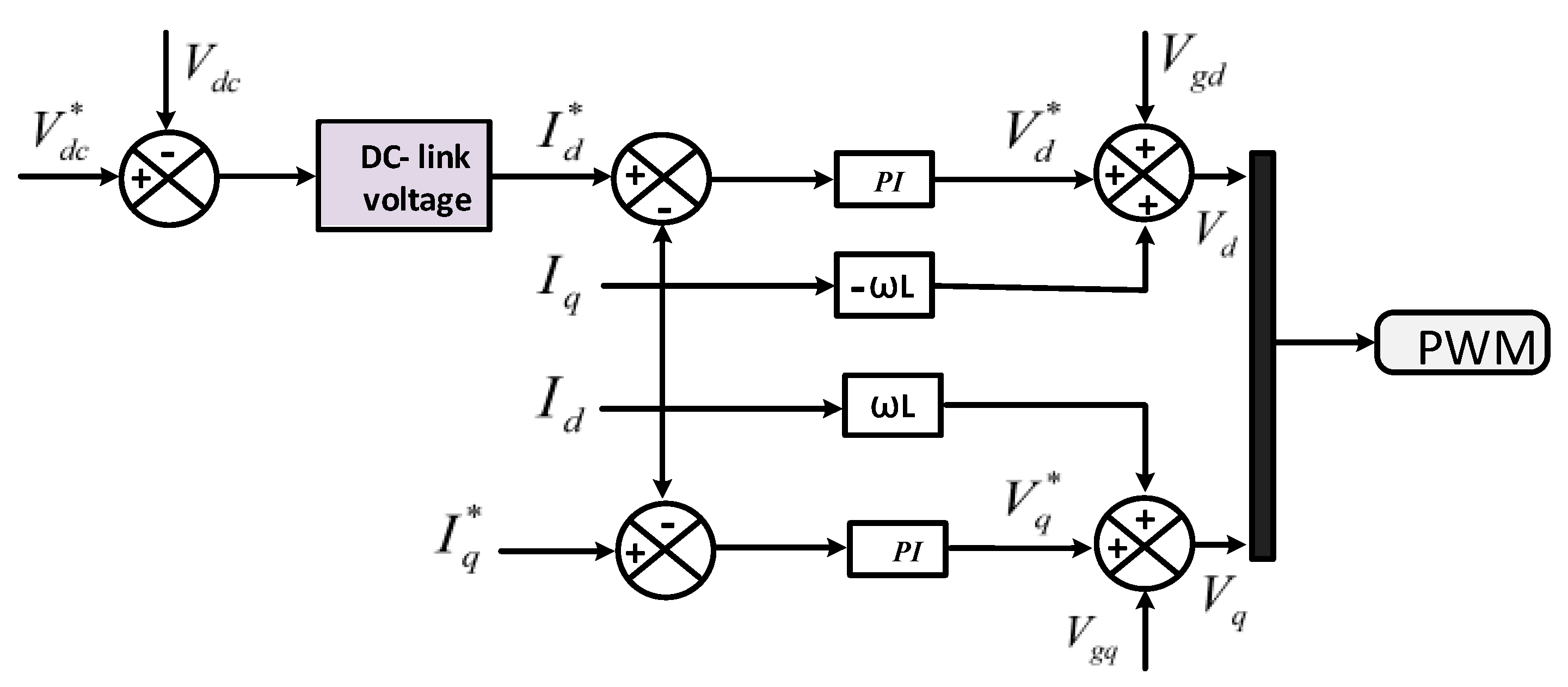
2.5. Design of the Controller and FRT Strategy
2.5.1. Controller Design
Proportional-Integral (PI) Controller
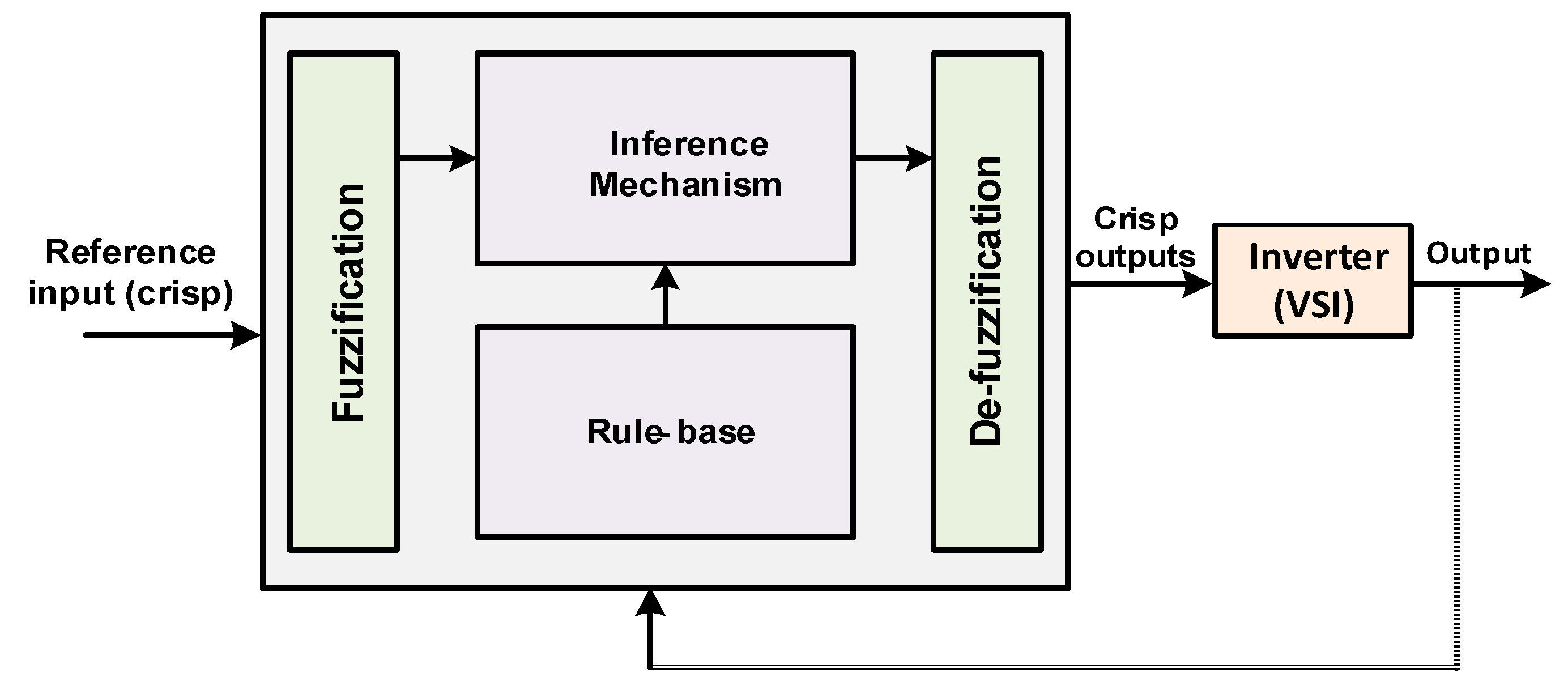
Fuzzy Logic (FLC) Controller Based on Levenberg–Marquardt (LM) Optimization
- Rule base is the set of linguistic rules, which holds the instructions for how to achieve a good output variables control.
- Inference mechanism emulates the set rules according to error. During this process, interpretation and knowledge is given about which rules are suitable for the present error to control the plant efficiently.
- Fuzzification is the process of taking the crisp values i.e., real scalars, which are real time information, are changed to fuzzy rules through membership functions. Fuzzification of the information is important for the inference mechanism to emulate easily.
- Defuzzification is the reverse process of fuzzification, which transforms the conclusion of the inference mechanism in crisp form or real time output. Various techniques are used for defuzzification like the center of minimum, the center of gravity, and the mean of maximum.
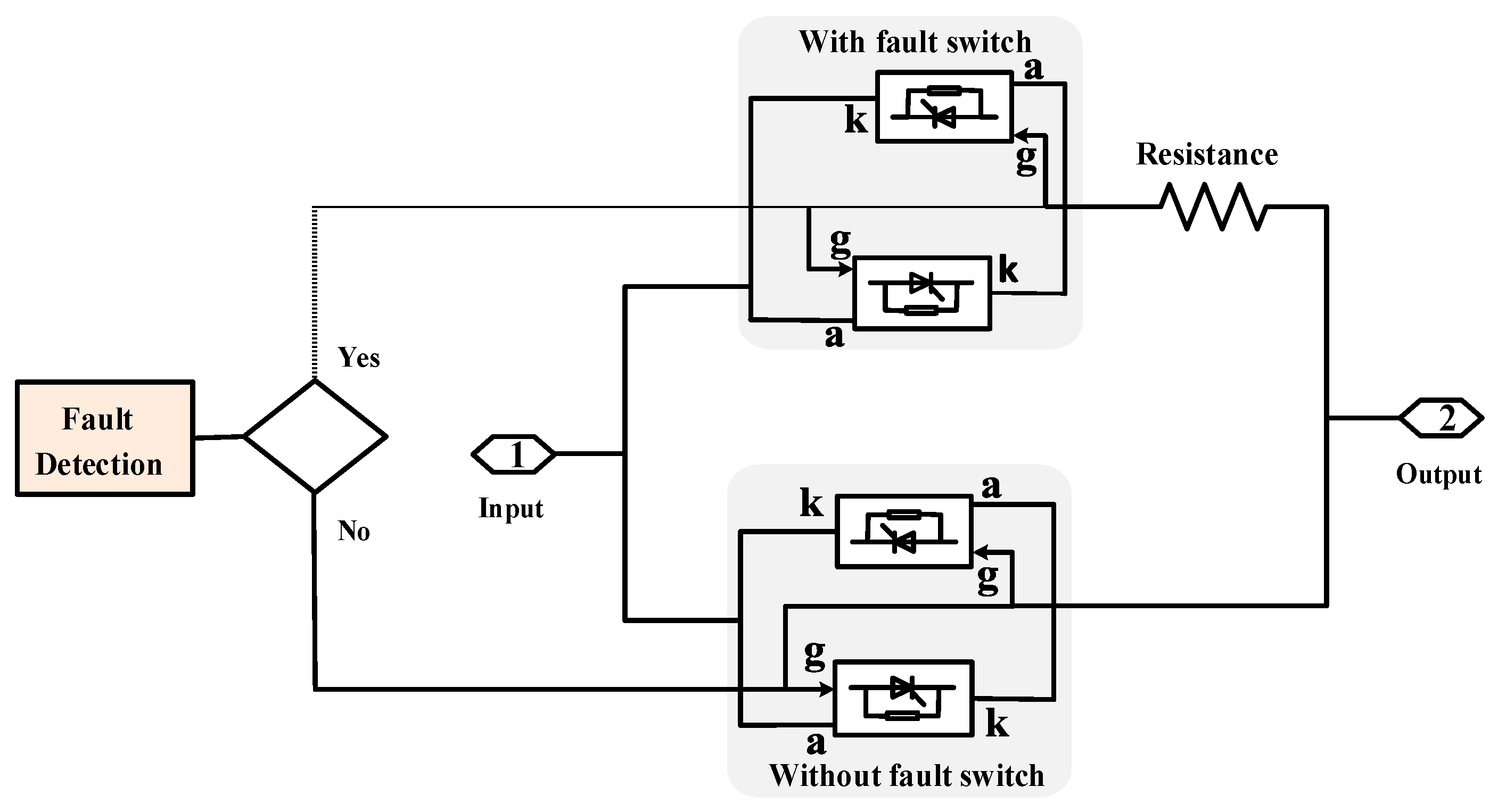
2.5.2. Fault Ride Through (FRT) Strategies
Crow-Bar Strategy
Bridge-Type Fault Current Limiters (BFCL)
3. Results and Discussion
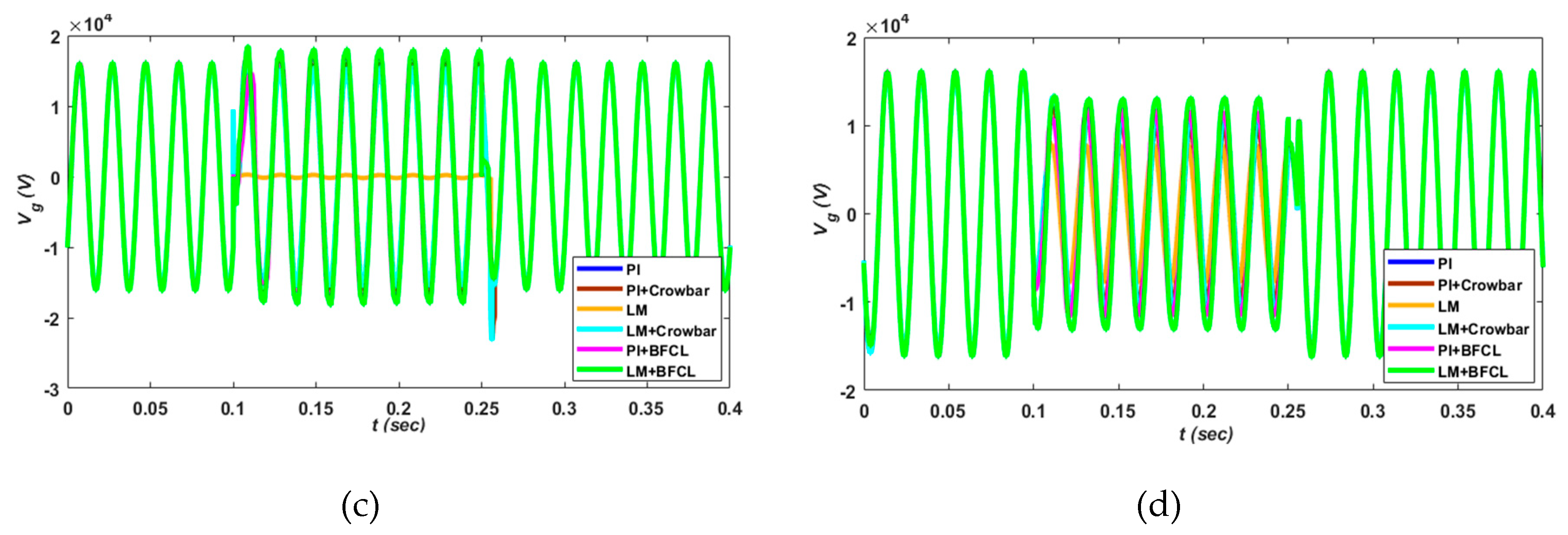
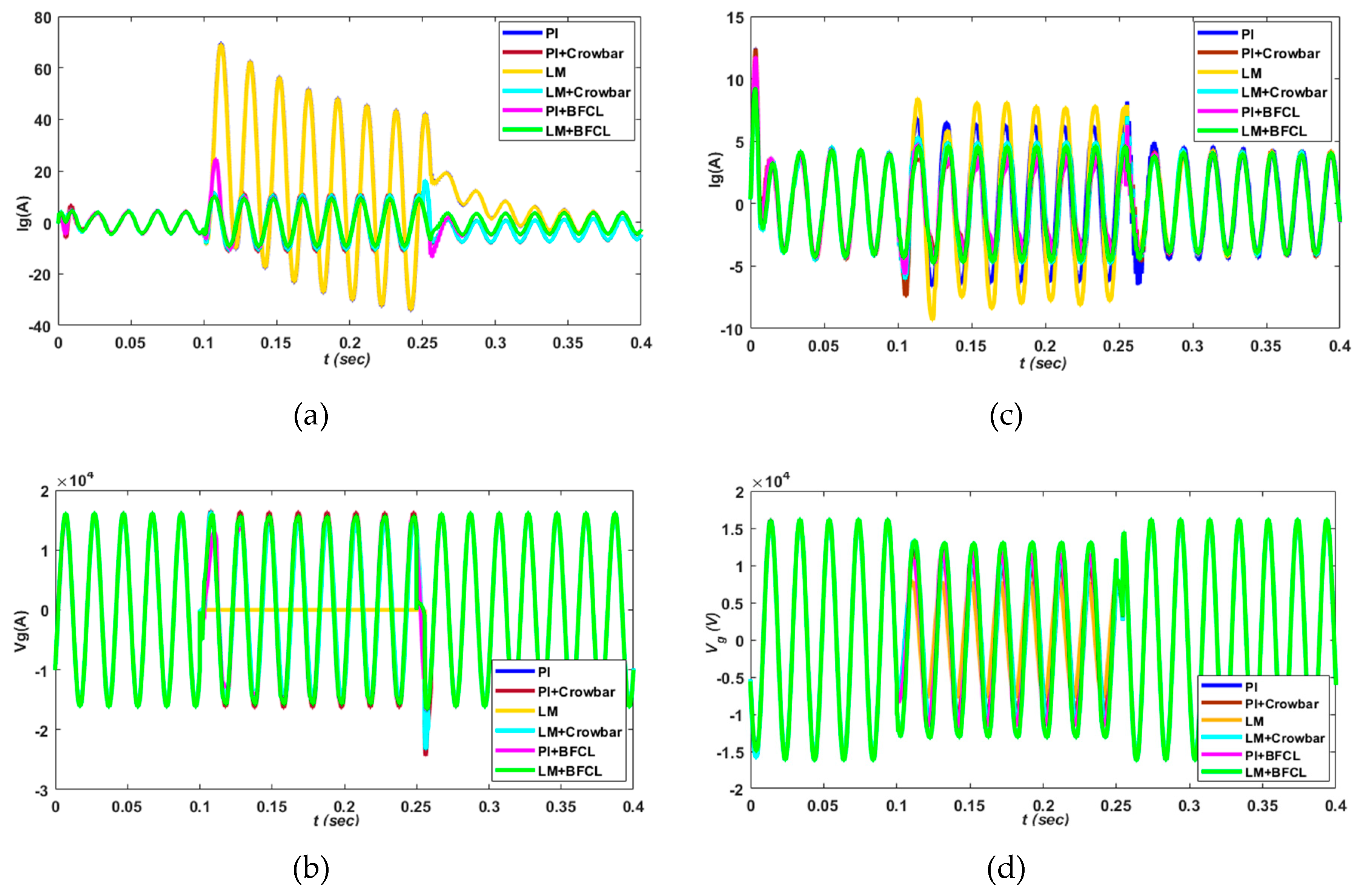
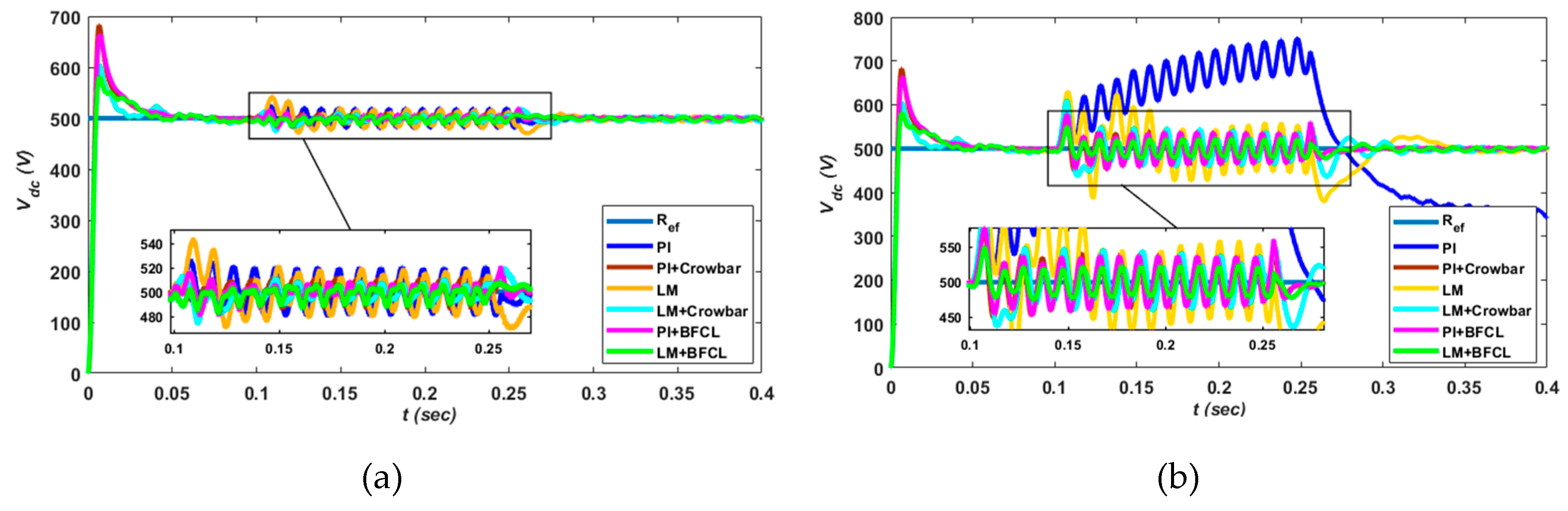
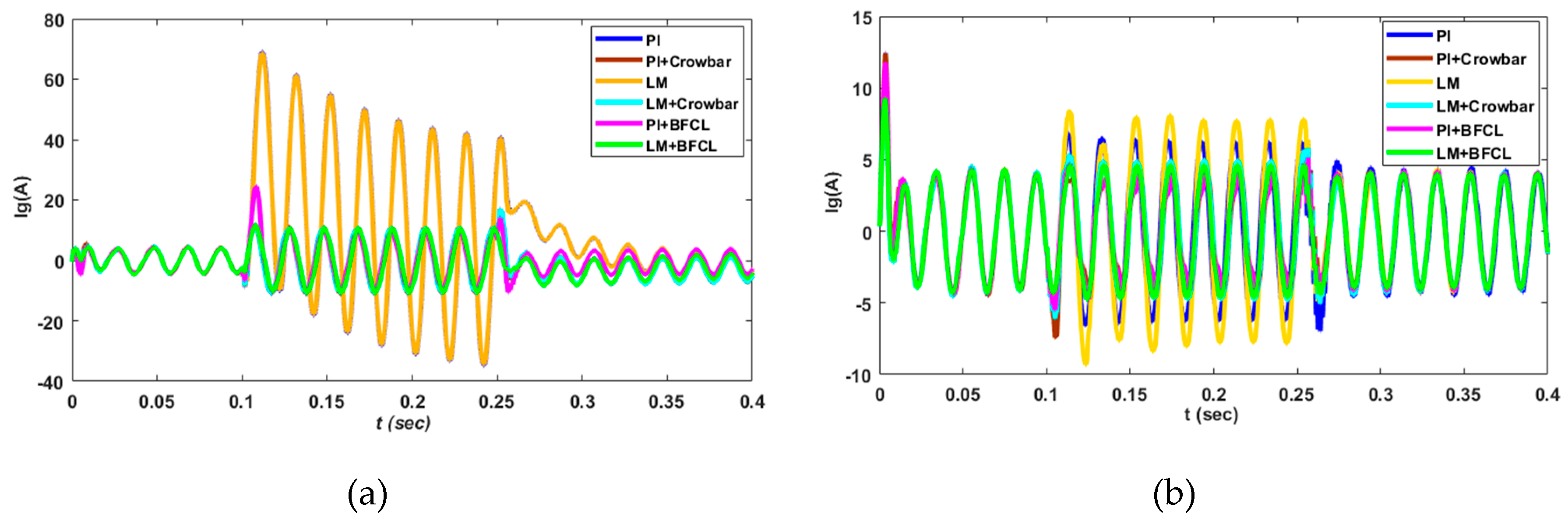
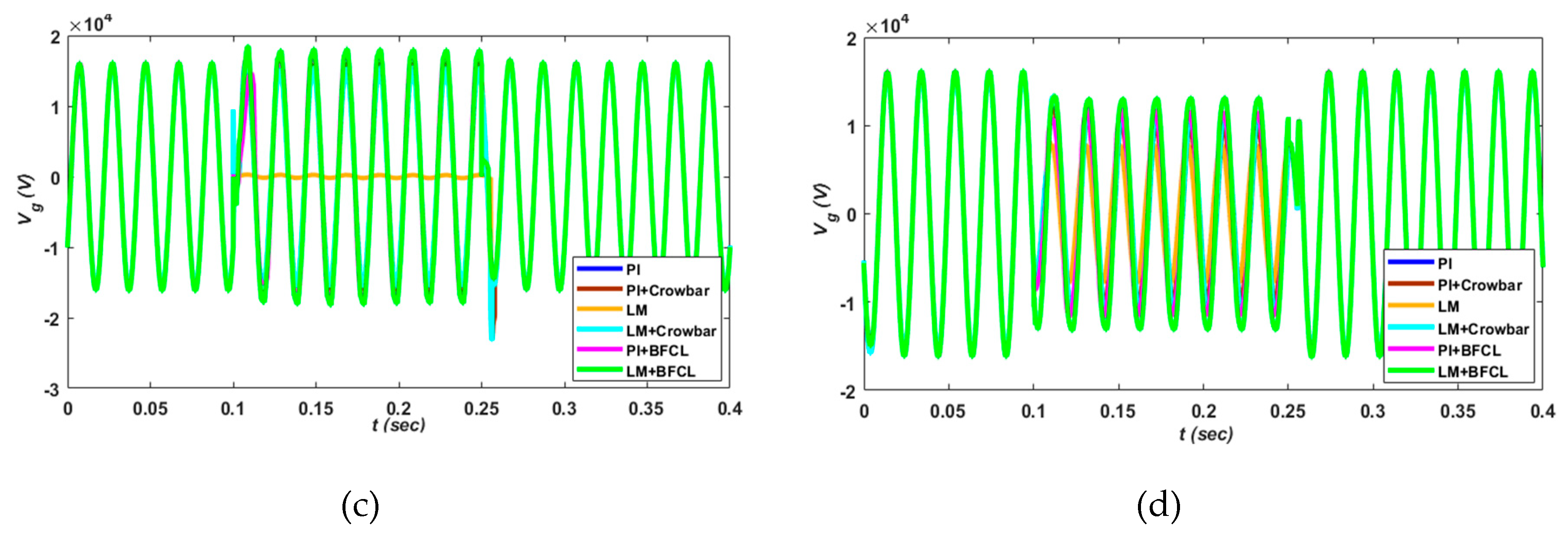
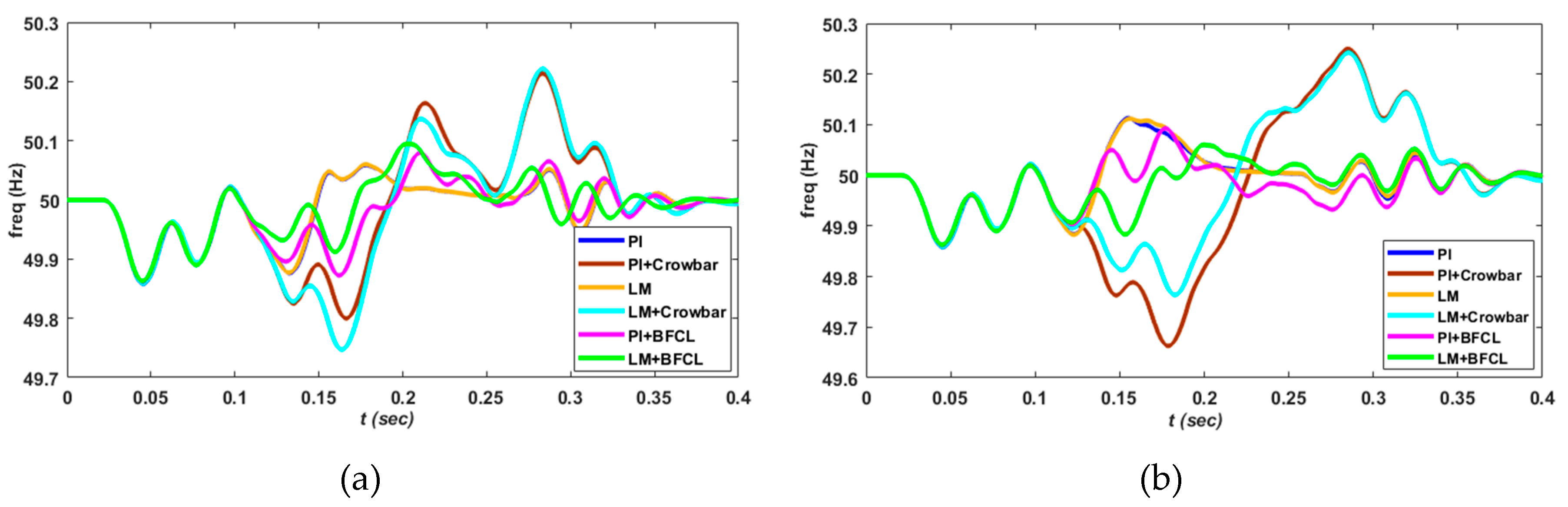
3.1. Asymmetrical Faults at PCC
3.2. Asymmetrical Faults at 5-km Distance
4. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| PV power | 100.6 kW |
| PV module voltage | 273 V (L-L, rms) |
| No. of Phases | 3 |
| Full-Load current of PV | 364 A |
| System operating frequency | 50 Hz |
| Boost-converter frequency | 5 kHz |
| Vdc | 500 V |
| Grid voltage | 20 KV |
| Choke impedance (R, L) | 2×10−3 ohm, 2.5×10−6 H |
| Sun irradiance for PV | 1000 (W/m2) |
| Temperature | 25 °C |
| Algorithm used for MPPT | Incremental conductance |
| Full -load current of grid | 2.94 A |
| Switching frequency of inverter | 2 kHz |
| Control Schemes | Parameters | Vdc | Id | Iq |
|---|---|---|---|---|
| PI | 7 | 0.3 | 0.3 | |
| 800 | 20 | 20 | ||
| FLC base on LM | 0.4 | 0.2 | 0.2 | |
| 1.2 | 0.6 | 0.6 | ||
| 0.4 | 0.2 | 0.2 | ||
| 0.8 | 0.4 | 0.4 | ||
| 0.4 | 0.2 | 0.2 | ||
| 1.2 | 0.6 | 0.6 | ||
| λ | 1.9 | 1.9 | 1.9 | |
| 0.62 | 0.62 | 0.62 |
| FRT Strategies | Parameters | Value/Type |
|---|---|---|
| Crowbar | 1800 Ω | |
| BFCL | 4.5 × 10−3 H | |
| 1800 Ω | ||
| 1 × 10−3 H | ||
| 40 Ω |
References
- Willisand, H.L.; Scott, W.G. Distributed Power Generation: Planning and Evaluation; Marcel-Dekker: New York, NY, USA, 2000. [Google Scholar]
- Dvarioniene, J.; Sinkuniene, J.; Gurauskiene, I.; Gecevicius, G.; Stasiskiene, Z. Analysis of integration of solar collector systems into district heat supply networks. Environ. Eng. Manag. J. 2013, 12, 2041–2050. [Google Scholar] [CrossRef]
- Available online: http://www.iea-pvps.org/fileadmin/dam/public/report/statistics/PVPS_report_-_A_Snapshot_of_Global_PV_-_1992-2013_-_final_3.pdf (accessed on 3 January 2019).
- Javadi, M.; Marzband, M. A Centralized Smart Decision-Making Hierarchical Interactive Architecture for Multiple Home Microgrids in Retail Electricity Market. Energies 2018, 11, 3144. [Google Scholar] [CrossRef]
- Valinejad, J.; Marzband, M. Long-term decision on wind investment with considering different load ranges of power plant for sustainable electricity energy market. Sustainability 2018, 10, 3811. [Google Scholar] [CrossRef]
- Masson, G.; Latour, M.; Rekinger, M.; Theologitis, I.T.; Papoutsi, M. Global Market Outlook for Photovoltaics 2013–2017; EUIP: Brussels, Belgium, 2013. [Google Scholar]
- REN21. Renewables 2014: Global Status Report. pp. 15–16. 2014. Available online: http://www.webcitation.org/6SKF06GAX (accessed on 8 February 2019).
- Valinejad, J.; Barforoshi, T.; Marzband, M. Investment Incentives in Competitive Electricity Markets. Appl. Sci. 2018, 8, 1978. [Google Scholar] [CrossRef]
- Marzband, M.; Azarinejadian, F. Smart transactive energy framework in grid-connected multiple home microgrids under independent and coalition operations. Renew. Energy 2018, 126, 95–106. [Google Scholar] [CrossRef]
- Bueno, P.G.; Hernández, J.C. Stability assessment for transmission systems with large utility-scale photovoltaic units. IET Renew. Power Gener. 2016, 10, 584–597. [Google Scholar] [CrossRef]
- Ruiz-Rodriguez, F.J.; Hernández, J.C. Voltage unbalance assessment in secondary radial distribution networks with single-phase photovoltaic systems. Int. J. Electr. Power Energy Syst. 2015, 64, 646–654. [Google Scholar] [CrossRef]
- Iov, F.; Hansen, A.D.; Sørensen, P.E.; Cutululis, N.A. Mapping of Grid Faults and Grid Codes; Risø National Laboratory, Technical University of Denmark: Roskilde, Denmark, 2007. [Google Scholar]
- On-GmbH, E. Grid Code—High and Extra High Voltage. Available online: http://www.eon-netz.com/ (accessed on 27 January 2019).
- Braun, M.; Arnold, G.; Laukamp, H. Plugging into the Zeitgeist. IEEE Power Energy Mag. 2009, 7, 63–76. [Google Scholar] [CrossRef]
- Comitato Elettrotecnico Italiano. CEI0-21: Reference Technical Rules for Connecting Users to the Active and Passive LV Distribution Companies of Electricity. Available online: http://www.ceiweb.it/ (accessed on 4 January 2019).
- Altin, M.; Goksu, O.; Teodorescu, R.; Rodriguez, P.; Jensen, B.B.; Helle, L. Overview of recent grid codes for wind power integration. In Proceedings of the 12th International Conference on Optimization of Electrical and Electronic Equipment, Brasov, Romania, 20–22 May 2010; pp. 1152–1160. [Google Scholar]
- Beach, T.; Kozinda, A.; Rao, V. Advanced Inverters for Distributed PV: Latent Opportunities for Localized Reactive Power Compensation; NREL/BR-6A20-62612; Cal x Clean Coalition Energy: Menlo Park, CA, USA, 2013; p. C226. Available online: https://clean-coalition.org/wp-content/uploads/2018/12/A.14-11-016-Ex-Parte-Letter-from-Clean-Coalition-in-support-of-DeAngelis-Proposed-Decision-with-attachments.pdf (accessed on 7 January 2019).
- Ding, G.; Gao, F.; Tian, H.; Ma, C.; Chen, M.; He, G.; Liu, Y. Adaptive dc-link voltage control of two-stage photovoltaic inverter during low voltage ride-through operation. IEEE Trans. Power Electron. 2016, 31, 4182–4194. [Google Scholar] [CrossRef]
- Stetz, T.; Marten, F.; Braun, M. Improved low voltage grid-integration of photovoltaic systems in Germany. IEEE Trans. Sustain. Energy 2013, 4, 534–542. [Google Scholar] [CrossRef]
- Tsili, M.; Papathanassiou, S. A review of grid code technical requirements for wind farms. IET Renewable Power Gener. 2009, 3, 308–332. [Google Scholar] [CrossRef]
- Troester, E. New German grid codes for connecting PV systems to the Medium Voltage Power Grid, 2nd; In Proceedings of the International Workshop on Concentrating PV Power Plants, Darmstadt, Germany, 18 November 2011.
- Lin, W.M.; Hong, C.M. A new Elman neural network-based control algorithm for adjustable-pitch variable-speed wind-energy conversion systems. IEEE Trans. Power Electron. 2011, 26, 473e481. [Google Scholar] [CrossRef]
- Gaing, Z.L. Wavelet-based neural network for power disturbance recognition and classification. IEEE Trans. Power Del. 2004, 19, 1560e1568. [Google Scholar] [CrossRef]
- Rodriguez, P.; Timbus, A.V.; Teodorescu, R.; Liserre, M.; Blaabjerg, F. Flexible active power control of distributed power generation systems during grid faults. IEEE Trans. Ind. Electron. 2007, 54, 2583–2592. [Google Scholar] [CrossRef]
- Teodorescu, R.; Liserre, M.; Rodriguez, P. Grid Converters for Photovoltaic and Wind Power Systems; Wiley: Hoboken, NJ, USA, 2011; Volume 29. [Google Scholar]
- Castilla, C.M.; Miret, J.; Borrell, A.; de Vicuna, L.G. Active and reactive power strategies with peak current limitation for distributed generation inverters during unbalanced grid faults. IEEE Trans. Ind. Electron. 2015, 62, 1515–1525. [Google Scholar]
- Specht, D.F. Probabilistic neural network. Neural Netw. 1990, 3, 109–118. [Google Scholar] [CrossRef]
- Liu, Z.; Li, H.X. A probabilistic fuzzy logic system for modeling and control. IEEE Trans. Fuzzy Syst. 2005, 13, 848–859. [Google Scholar]
- Cardenas, R.; Pena, R.; Alepuz, S.; Asher, G. Overview of control system for the operation of DFIGs in wind energy application. IEEE Trans. Ind. Electron. 2013, 60, 2776–2798. [Google Scholar] [CrossRef]
- Li, H.X.; Liu, Z. A probabilistic neural-fuzzy learning system for stochastic modeling. IEEE Trans. Fuzzy Syst. 2008, 16, 898e908. [Google Scholar] [CrossRef]
- Zeb, K.; Khan, I.; Uddin, W. A Review on Recent Advances and Future Trends of Transformerless Inverter Structures for Single-Phase Grid-Connected Photovoltaic Systems. Energies 2018, 11, 1968. [Google Scholar] [CrossRef]
- Massawe, H.B. Grid Connected Photovoltaic Systems with SmartGrid functionality. Master’s Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2013. [Google Scholar]
- Makhlouf, M.; Messai, F.; Benalla, H. Modeling and control of a single-phase grid connected photovoltaic system. J. Theor. Appl. Inf. Technol. 2012, 37, 289–296. [Google Scholar]
- Available online: www.mathworks.com (accessed on 27 February 2019).
- Banu, V.; Istrate, M. Modeling of maximum power point tracking algorithm for PV systems. In Proceedings of the 7th International Conference and Exposition on Electrical and Power Engineering (EPE), Lasi, Romania, 25–27 October 2012; pp. 953–957. [Google Scholar]
- Kazmierkowski, M.; Krishnan, R.; Blaabjerg, F. Control in Power Electronics—Selected Problems; Academic Press: New York, NY, USA, 2002. [Google Scholar]
- Harb, A.M.; Smadi, I.A. An Approach to Fuzzy Control for a Class of Nonlinear Systems: Stability and Design Issues. Int. J. Model. Simul. 2015, 25, 106–111. [Google Scholar] [CrossRef]
- Wilamowski, B.M.; Yu, H. Im proved computation for Levenberg Marquardt training. IEEE Trans. Neural Netw. 2010, 21, 930–937. [Google Scholar] [CrossRef] [PubMed]
- Menhaj, M.T.H.M. Training feedforward networks with the Marquardt algorithm. IEEE Trans. Neural Netw. 1994, 5, 989–993. [Google Scholar]
- Rashid, G.; Hasan Ali, M. Transient Stability Enhancement of Doubly Fed Induction Machine-Based Wind Generator by Bridge-Type Fault Current Limiter. IEEE Trans. Energy Convers. 2015, 30, 939–947. [Google Scholar] [CrossRef]
- Naderi, S.B.; Jafari, M. Impact of bridge type fault current limiter on power system transient stability. In Proceedings of the 7th International Conference of Electronic Engineering, Bursa, Turkey, 4 December 2011; pp. 1–4. [Google Scholar]
- Luo, X.; Wang, J. Review of Voltage and Frequency Grid Code Specifications for Electrical Energy Storage Applications. Energies 2018, 11, 1070. [Google Scholar] [CrossRef]
- Hernández, J.C.; Bueno, P.G. Enhanced utility-scale photovoltaic units with frequency support functions and dynamic grid support for transmission systems. IET Renew. Power Gener. 2017, 11, 361–372. [Google Scholar] [CrossRef]










| Control Strategies | Single Phase | Two Phase | ||||
|---|---|---|---|---|---|---|
| IAE | ISE | ITAE | IAE | ISE | ITAE | |
| PI | 0.0211 | 0.43 | 0.0029 | 0.0754 | 1.233 | 0.0161 |
| PI+Crowbar | 0.0158 | 0.38 | 0.0025 | 0.0185 | 0.924 | 0.0029 |
| LM | 0.0266 | 0.52 | 0.0031 | 0.0612 | 1.145 | 0.0131 |
| LM+Crowbar | 0.0143 | 0.56 | 0.0020 | 0.0184 | 0.839 | 0.0024 |
| PI+BFCL | 0.0126 | 0.48 | 0.0007 | 0.0629 | 0.953 | 0.0018 |
| LM+BFCL | 0.0122 | 0.46 | 0.0006 | 0.0158 | 0.872 | 0.0013 |
| Control Strategies | Single Phase | Two Phase | ||||
|---|---|---|---|---|---|---|
| IAE | ISE | ITAE | IAE | ISE | ITAE | |
| PI | 0.0357 | 0.0096 | 0.0051 | 0.1164 | 0.0500 | 0.0290 |
| PI + Crowbar | 0.1107 | 0.0633 | 0.0269 | 0.1204 | 0.0755 | 0.0296 |
| LM | 0.0273 | 0.0061 | 0.0041 | 0.1424 | 0.0833 | 0.0354 |
| LM + Crowbar | 0.0935 | 0.0405 | 0.0228 | 0.1030 | 0.0496 | 0.0257 |
| PI + BFCL | 0.0338 | 0.0110 | 0.0042 | 0.1114 | 0.0486 | 0.0278 |
| LM + BFCL | 0.0258 | 0.0071 | 0.0030 | 0.1002 | 0.0412 | 0.0257 |
| Control Strategies | Single Phase | Two Phase | ||||
|---|---|---|---|---|---|---|
| IAE | ISE | ITAE | IAE | ISE | ITAE | |
| PI | 0.0426 | 0.0513 | 0.0028 | 0.0834 | 0.0672 | 0.0113 |
| PI + Crowbar | 0.0655 | 0.0574 | 0.0096 | 0.0746 | 0.0601 | 0.0113 |
| LM | 0.0434 | 0.0516 | 0.0027 | 0.0997 | 0.0931 | 0.0142 |
| LM + Crowbar | 0.0531 | 0.0531 | 0.0053 | 0.0826 | 0.0557 | 0.0090 |
| PI + BFCL | 0.0371 | 0.0368 | 0.0021 | 0.0747 | 0.0490 | 0.0099 |
| LM + BFCL | 0.0321 | 0.0392 | 0.0019 | 0.0734 | 0.0485 | 0.0087 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Islam, S.U.; Zeb, K.; Din, W.U.; Khan, I.; Ishfaq, M.; Hussain, A.; Busarello, T.D.C.; Kim, H.J. Design of Robust Fuzzy Logic Controller Based on the Levenberg Marquardt Algorithm and Fault Ride Trough Strategies for a Grid-Connected PV System. Electronics 2019, 8, 429. https://doi.org/10.3390/electronics8040429
Islam SU, Zeb K, Din WU, Khan I, Ishfaq M, Hussain A, Busarello TDC, Kim HJ. Design of Robust Fuzzy Logic Controller Based on the Levenberg Marquardt Algorithm and Fault Ride Trough Strategies for a Grid-Connected PV System. Electronics. 2019; 8(4):429. https://doi.org/10.3390/electronics8040429
Chicago/Turabian StyleIslam, Saif Ul, Kamran Zeb, Waqar Ud Din, Imran Khan, Muhammad Ishfaq, Altaf Hussain, Tiago Davi Curi Busarello, and Hee Je Kim. 2019. "Design of Robust Fuzzy Logic Controller Based on the Levenberg Marquardt Algorithm and Fault Ride Trough Strategies for a Grid-Connected PV System" Electronics 8, no. 4: 429. https://doi.org/10.3390/electronics8040429
APA StyleIslam, S. U., Zeb, K., Din, W. U., Khan, I., Ishfaq, M., Hussain, A., Busarello, T. D. C., & Kim, H. J. (2019). Design of Robust Fuzzy Logic Controller Based on the Levenberg Marquardt Algorithm and Fault Ride Trough Strategies for a Grid-Connected PV System. Electronics, 8(4), 429. https://doi.org/10.3390/electronics8040429